Construction and Layout of Coordinated Multirobots...
11
Research Article Construction and Layout of Coordinated Multirobots System Based on Parallel Thought Wanqiang Xi, 1,2 Yaoyao Wang , 1 Yadong Ding, 1 and Bai Chen 1 1 College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 2 College of Mechanical Engineering, Jiangsu University of Technology, Changzhou 213001, China Correspondence should be addressed to Yaoyao Wang; yywang [email protected] Received 1 October 2018; Revised 4 December 2018; Accepted 19 December 2018; Published 3 January 2019 Academic Editor: Yangmin Li Copyright © 2019 Wanqiang Xi et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Aiming at the problems that are the construction and the layout optimization of the coordinated multirobots system, the concept of an equivalent parallel robot (EPR) is proposed based on parallel thought in this paper. at is, each robot is regarded as a branched chain of the EPR in coordination. us, it can be converted into the problem for the type synthesis and the layout of the parallel robot. Firstly, the definition of robotic characteristic (C) set and the corresponding operational rule are given. en, the minimum occupied area, cycle time, and condition number are used as the optimized objectives. e weight ratio is used to express the importance of the three objectives to meet the requirements of different scenes. Aſterwards, based on the theory of set, the three translational (3T) operational requirements that can be extended to other degree of freedom (DOF) are analyzed. Finally, the feasibility of the proposed methods is verified by the DOF analysis and simulation experiment. Moreover, the multiobjective layout problem is optimized based on the artificial bee colony (ABC) algorithm. e results show that the constructed robot combinations and the layout optimization method are satisfactory. 1. Introduction e development of robotics has continuously improved the work capabilities of robots, and the field of robotic applications is constantly expanding [1, 2], for example, assembly work in automated factories, deep-sea operations, fault handling in the nuclear industry, and operational tasks in space. On the one hand, due to the complexity of the task, when a single robot is difficult to complete the task, people hope to accomplish this through coordination of multirobots [3]. On the other hand, people also hope to improve the efficiency of the robots system during the operation through the coordination of the multirobots [4]. Furthermore, when the working environment changes or the partial system fails, multirobots can still accomplish their scheduled tasks through their own fault tolerance [5]. In conclusion, compared with a single robot, multirobots system has higher stiffness, accuracy, load capacity, and flexibility [6, 7]. As a new form of robotic application, the coordinated multirobots have increasingly attracted the interest and concern of academic both at home and abroad. For the different operational tasks, different DOF may be required, so the robots need to be chosen to meet the operational DOF. Although the combinations of robots can meet the oper- ational requirements, the unreasonable layout may reduce the efficiency of the system, occupy more areas, and have poor motion performance [8–10]. e previous work of the authors has done some research on the type synthesis of the coordinated multirobots system [11]. However, the set in the description of the position and posture of a robot is not detailed enough, and the layout optimization is still lacking, and it cannot constitute the overall design of the coordinated multirobots system. ese problems will be studied in this paper. e layout of the multirobots system is to optimize its layout position according to different operational tasks aſter the branched robots are determined. e positions of the branched robots are adjusted for the different requirements of the task to achieve the best layout effect. However, for a parallel robot, it is generally achieved through dimension Hindawi Journal of Robotics Volume 2019, Article ID 9531387, 10 pages https://doi.org/10.1155/2019/9531387
Transcript of Construction and Layout of Coordinated Multirobots...

Research ArticleConstruction and Layout of Coordinated MultirobotsSystem Based on Parallel Thought
Wanqiang Xi12 YaoyaoWang 1 Yadong Ding1 and Bai Chen 1
1College of Mechanical and Electrical Engineering Nanjing University of Aeronautics and Astronautics Nanjing 210016 China2College of Mechanical Engineering Jiangsu University of Technology Changzhou 213001 China
Correspondence should be addressed to Yaoyao Wang yywang cmeenuaaeducn
Received 1 October 2018 Revised 4 December 2018 Accepted 19 December 2018 Published 3 January 2019
Academic Editor Yangmin Li
Copyright copy 2019 Wanqiang Xi et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Aiming at the problems that are the construction and the layout optimization of the coordinated multirobots system the conceptof an equivalent parallel robot (EPR) is proposed based on parallel thought in this paper That is each robot is regarded as abranched chain of the EPR in coordinationThus it can be converted into the problem for the type synthesis and the layout of theparallel robot Firstly the definition of robotic characteristic (C) set and the corresponding operational rule are given Then theminimum occupied area cycle time and condition number are used as the optimized objectivesTheweight ratio is used to expressthe importance of the three objectives to meet the requirements of different scenes Afterwards based on the theory of 119862 set thethree translational (3T) operational requirements that can be extended to other degree of freedom (DOF) are analyzed Finally thefeasibility of the proposed methods is verified by the DOF analysis and simulation experimentMoreover the multiobjective layoutproblem is optimized based on the artificial bee colony (ABC) algorithmThe results show that the constructed robot combinationsand the layout optimization method are satisfactory
1 Introduction
The development of robotics has continuously improvedthe work capabilities of robots and the field of roboticapplications is constantly expanding [1 2] for exampleassembly work in automated factories deep-sea operationsfault handling in the nuclear industry and operational tasksin space On the one hand due to the complexity of thetask when a single robot is difficult to complete the taskpeople hope to accomplish this through coordination ofmultirobots [3] On the other hand people also hope toimprove the efficiency of the robots system during theoperation through the coordination of the multirobots [4]Furthermore when the working environment changes or thepartial system fails multirobots can still accomplish theirscheduled tasks through their own fault tolerance [5] Inconclusion comparedwith a single robotmultirobots systemhas higher stiffness accuracy load capacity and flexibility[6 7]
As a new form of robotic application the coordinatedmultirobots have increasingly attracted the interest and
concern of academic both at home and abroad For thedifferent operational tasks different DOF may be requiredso the robots need to be chosen tomeet the operational DOFAlthough the combinations of robots can meet the oper-ational requirements the unreasonable layout may reducethe efficiency of the system occupy more areas and havepoor motion performance [8ndash10] The previous work of theauthors has done some research on the type synthesis of thecoordinated multirobots system [11] However the 119862 set inthe description of the position and posture of a robot is notdetailed enough and the layout optimization is still lackingand it cannot constitute the overall design of the coordinatedmultirobots system These problems will be studied in thispaper
The layout of the multirobots system is to optimize itslayout position according to different operational tasks afterthe branched robots are determined The positions of thebranched robots are adjusted for the different requirementsof the task to achieve the best layout effect However fora parallel robot it is generally achieved through dimension
HindawiJournal of RoboticsVolume 2019 Article ID 9531387 10 pageshttpsdoiorg10115520199531387
2 Journal of Robotics
o
Tz
Tx
Ty
(a) Transnational features
O
R
R
R
(b) Rotational features
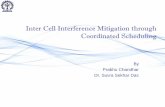
Figure 1 Description for the end-features of the 119862 set
synthesis to meet the operational requirements thus itsbranches will not change once they are laid out At presentthere are few relevant literatures on the layout of coordinatedmultirobots system It mainly depends on the actual experi-ence and cannot achieve the best results Michele Gadaleta etal proposed themethod for the energy-optimal layout designof robotic work cells which numerically retrieved the indus-trial robot base position to achieve the minimum energyconsumption [12] Zhen Yang Lim et al presented a layoutoptimization method for multirobots cellular manufacturingsystem and compared the effects of several algorithms on theoptimization results [13 14] However either the optimizedobjectives are too single or the result of optimization isonly an approximate areas It is not possible to give anaccurate layout according to the different operational tasksand the importance of the optimized objectives This paperproposes to use the minimum occupied area cycle timeand condition number as the optimized objectives Theweight coefficient is used to express the importance ofthe three objectives to meet the requirements for differentscenes of the tasks and the artificial bee colony (ABC)algorithm is used to optimize the multiobjective layoutproblem
The main contributions of this paper are as follows (a)The problem for the construction and layout optimization ofa coordinatedmultirobots system is transformed into the typesynthesis and layout of a parallel mechanism based on theparallel thought (b) The concept of C set is presented whichcan conveniently represent the end kinematic features (for therobot selection of multirobots) and the position and postureof the robot (c) The multiobjective layout optimizationmethod with weighted ratios is proposed and the minimumoccupied area cycle time and condition number are usedas the optimized objectives The remainder of this paper isorganized as follows In Section 2 the basic concept of robotic119862 set is given and corresponding intersection rule is analyzedIn Section 3 the minimum occupied area cycle time andcondition number are taken as optimized objectives for thelayout The selection and layout of a specific task (3T) aremainly designed in Section 4 Lastly Section 5 draws theconclusion
2 Characteristic Set and Its Intersection Rule
The characteristic (119862) set is used to describe the end-featureof a mechanism and the position and the posture of its base[11] as shown in
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 119877120574) (1)
where 119879119894 (119894 = 119909 119910 119911) represents the translational features ofrobotrsquos end-effector in the direction of 119909 119910 and 119911 and theposition of its base 119877119895 (119895 = 120572 120573 120574) represents the rotationalfeatures and the posture of its base They are just as shown inFigure 1
The meaning of the numerical values of the 119862 setrsquoselements is described in the literature [11] The followingexamples are illustrated
For example there is a four-DOF robot with two trans-lational features in the 119909 and 119910 directions and two rotationalfeatures rotating around the 119909 and 119910 axes which belongs to a2T2R robot If the world coordinate system is set as the basecoordinate system of the robot its 119862 set can be written as(0 0 0 0 0 0) If the position and posture of the robotrsquosbase coordinate system is not 0 relative to the world coordi-nate system (neither the coordinates nor the RPY angles are0) its 119862 set can be written as (119879119909 119879119910 119911 119877120572 119877120573 120574)
The operation of 119862 set includes intersection and unionand the intersection is suitable for parallelmechanism [15 16]It is can be defined in
119862 = 1198621 cap 1198622 = (119879119909 119879119910 119879119911 119877120572 119877120573 119877120574) (2)
where cap stands for the intersection operator
3 Layout of Multirobots
The layout optimization of a coordinated multirobots systemcan be considered as a parallel robot whose branched chainsrsquopositions are changed to achieve theminimumoccupied areacycle time and condition number
31 Occupied Area Reasonable layout will reduce the occu-pied area of the completely coordinatedmultirobots system inthe workshop [13] For a parallel robot the objective can beseen as the minimum of the static platform area by changing
Journal of Robotics 3
the position and the posture of its branches to meet therequired tasks The calculation method of the occupied areais that the graphic area formed by the plane where the base ofeach robot is located Moreover it can be calculated based onthe value of each robotrsquos 119862 set
32 Cycle Time In order to be more efficient the productionshop requires less time for the whole process Therefore ittakes minimal time for EPR to complete the task The cycletime of the EPR is determined by its rotation angle andthe maximum angular velocity The following equations arespecified
Assume that the angular velocity of the jth joint of Noirobot is 120596119895119894 In a cycle time T the continuous rotation angleof the jth joint is |120579119895119894 | and the time of the jth joint is
119879119895119894 =10038161003816100381610038161003816120579119895119894
10038161003816100381610038161003816120596119895119894
(119894 119895 = 1 2 119899) (3)
However the running time of each robotrsquos joint may bedifferent Now set the running time of Noi robot in the cycletime 119879 as
119879119894 = max (119879119895119894 ) (4)
During the cycle time T the simultaneous tasks run for
119879119904 = max (119879119894) (119904 = 1 2 119899) (5)
Therefore the total cycle time is the sum of the time for eachindependent task that is
119879 =119899
sum119904=1
119879119904 (6)
Similar to the EPR it is required to arrange the position andthe posture of each branch for a parallel robot reasonablyWhen the task is completed the branch with the longestconsumption time is considered as the minimum cycle time119879 of the parallel robot In the following sections the specificexample will be given
33 Condition Number For serial robots the statics per-formance index of robotrsquos flexibility is generally used byYoshikawarsquos manipulability index [17] That is
119908119895 = radic1003816100381610038161003816119869 (119902) 119869119879 (119902)1003816100381610038161003816 (7)
where 119869(119902) is the Jacobian matrix of the robot and 119869119879(119902) is theinverse of the Jacobian matrix However for a parallel robotthe condition number is often used as its performance index[18] In a highly coupledmultirobots cooperative system suchas multirobots transporting it can be seen as an EPR and itscondition number is [19]
120581 (119869) = 119869 10038171003817100381710038171003817119869minus110038171003817100381710038171003817 (8)
where 119869 is the norm of the Jacobian matrix 119869 and for the2-norm the condition number can be written as [20]
120581 (119869) = 120590max120590min
(9)
where 120590max and 120590min are the maximum and minimumsingular values of the Jacobian matrix 119869 respectively and therange of the condition number is 1 le 120581(119869) le infin
When designing a parallel robot the value of the condi-tion number should be 1 as far as possible [21] Because when120581(119869) = 1 the singular values are equal and the arm is in anisotropic configuration with the highest flexibility
34 Weight Fitness Layout optimization means that the rea-sonable layout is selected to meet the different requirementsIn this paper the minimum occupied area cycle time andcondition number are taken as the optimized objectivesof the layout However in actual situation one or twocombinations may be dominant Therefore the proportionof these three evaluation indicators is particularly importantand the weight ratio will be used to express the importance ofthe three indicators
The fitness of the area is expressed as
119891119894119905119886 =1
1 + (119878 minus 119878min) (10)
where 119878 is the occupied area and 119878min is the minimumoccupied area The fitness of the operation time is expressedas
119891119894119905119905 =1
1 + (119879 minus 119879min) (11)
where119879 is the cycle operation time and 119879min is the minimumcycle operation time The fitness of condition number isexpressed as
119891119894119905119888 =1
1 + (119873 minus 119873min) (12)
where119873 represents the condition number of the coordinatedmultirobots system and 119873min represents the minimum con-dition number
According to different operational requirements a rea-sonable weight ratio is designed to represent the importanceof the systemrsquos indicators
119891119894119905 = 119886119891119894119905119886 + 119887119891119894119905119905 + 119888119891119894119905119888 (13)
where 119886 119887 and 119888 are the weight coefficients and 119886 + 119887 +119888 = 1 Their values are determined by their importance Themore important a certain indicator is the greater its weightcoefficient is
The values of 119878min 119879min and 119873min in the above threeequations are obtained by ignoring the other two indicatorsFor example when 119878min is calculated only the area indicatoris considered and the requirement of the operation time andthe condition number are abandoned that is in the casewhere 119886 = 1 b = 0 and c = 0
To optimize the above-mentioned three objectives thefollowing assumptions are needed
(1) If there is a nonstatic robot in the system (the base canmove) its maximum moving area is set as the staticarea
4 Journal of Robotics
Table 1 The combinations of the branched robots with 3T motion
Chain1 Chain2 Chain3 Combinations Structure
11986231198791
11986231198792
11986231198793 11986231198791 cap 11986231198792 cap 11986231198793 symmetry119862311987911198773 11986231198791 cap 11986231198792 cap 119862311987911198773
asymmetry
119862311987921198773 11986231198791 cap 11986231198792 cap 119862311987921198773119862311987931198773 11986231198791 cap 11986231198792 cap 119862311987931198773
119862311987911198772119862311987911198773 11986231198791 cap 119862311987911198772 cap 119862311987911198773119862311987921198773 11986231198791 cap 119862311987911198772 cap 119862311987921198773119862311987931198773 11986231198791 cap 119862311987911198772 cap 119862311987931198773
119862311987921198772119862311987921198773 11986231198791 cap 119862311987921198772 cap 119862311987921198773119862311987931198773 11986231198791 cap 119862311987921198772 cap 119862311987931198773
119862311987931198772 119862311987931198773 11986231198791 cap 119862311987931198772 cap 119862311987931198773
119862311987911198771119862311987911198772
119862311987911198773 119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 symmetry119862311987921198773 119862311987911198771 cap 119862311987911198772 cap 119862311987921198773
asymmetry119862311987931198773 119862311987911198771 cap 119862311987911198772 cap 119862311987931198773119862311987921198772
119862311987921198773 119862311987911198771 cap 119862311987921198772 cap 119862311987921198773119862311987931198773 119862311987911198771 cap 119862311987921198772 cap 119862311987931198773
119862311987921198771 119862311987921198772 119862311987921198773 119862311987921198771 cap 119862311987921198772 cap 119862311987921198773 symmetry
(2) The moving point is set as the base coordinate pointof the robot
(3) Each joint runs at the maximum speed
4 Case Study
For example a procedure of a factoryrsquos production line needsto transport the goods with heavy or bulk from worktableA to worktable B (only involving the three-dimensionaltranslation of the space) However many small-load robotswith the same or different types cannot complete this taskalone Considering the cost savings no new heavy-loadrobot will be purchased At this time it is necessary tofilter and reorganize the existing robots in the factory andbuild a coordinated multirobots handling system composedof multiple robots
Next the above-mentioned type synthesis method andweight multiobjective optimization method will be usedin the chain selection and the layout design of the EPRseparately
41 The Selection of the 3T EPRrsquos Chains The 119862 set of the 3TEPRrsquos end-manipulator is expressed as follows
119862 = (119879119909 119879119910 119879119911 0 0 0) (14)
The literature [11] shows that the 119862 set of the EPRrsquos end-manipulator is determined by
119862 = 1198621 cap 1198622 cap 1198623 (15)
where 1198621 1198622 and 1198623 are the 119862 sets of the EPRrsquos three-branched robots respectively and the 119862 set of the branchedrobots can be expressed as
119862 = (119879119909 119879119910 119879119911 0 0 0) (16)
119862 = (119879119909 119879119910 119879119911 119877120572 0 0) (17)
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 0) (18)
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 119877120574) (19)
It can be seen from (15) that the 119862 set of the 3T EPR canbe obtained by the intersection of the 119862 sets for the abovethree-branched robots As seen in Table 1 there are sixteencombinations of the branched chains and the intersectionsmust satisfy (2)
The classification and the condition of the combinationsfrom Table 1 are listed in Table 2 According to the Table 1the intersection just as 119862 = (119879119909 119879119910 119879119911 0 0 0) has fifteencombinations and the proper subset of intersection just as119862 =(119879119909 119879119910 119879119911 0 0 0) has 9 combinations
Since each branched chain of EPR is an independentrobot it can be a parallel or serial robot The common robotswith 3 to 6 DOF are listed in Table 3
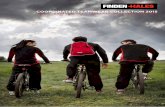
Then the combinations of the robots are selected to meetthe task requirements (3T) and the choice of this paper isthe combination of 11986231198791 cap 119862311987931198772 cap 119862311987931198773 That is a parallelrobot 3-PRRR and two six DOF serial robots are used asthe EPRrsquos branched chains to transport the goods as shownin Figure 2 The three pneumatic hands are fixed under themoving platform of the 3-PRRR and the end of the serialrobots to transport triangular goods In this process thethree hands contact the goods closely without any changein position and posture between them At this moment thegoods can be seen as a moving platform for the EPR and thethree robots are taken as the three-branched chains for theEPR The screw theory [22] is used to analyze the DOF ofEPR in the Equations (20) (21) and (24)
As shown in Figure 2 the parallel robot 3-PRRR iscomposed of a moving platform and a static platform whichare connected by the same three-branched chains It is notdifficult to see that the kinematic screw system of the parallelrobot 3-PRRR is
Journal of Robotics 5
Table 2 Classification for the combinations of the branched robots
Objectives Combinations Conditions
119862 = (119879119909 119879119910 119879119911 0 0 0)
11986231198791 cap 11986231198792 cap 11986231198793
No requirements
11986231198791 cap 11986231198792 cap 11986231198791119877311986231198791 cap 11986231198792 cap 11986231198792119877311986231198791 cap 11986231198792 cap 11986231198793119877311986231198791 cap 119862311987911198772 cap 11986231198791119877311986231198791 cap 119862311987911198772 cap 11986231198792119877311986231198791 cap 119862311987911198772 cap 11986231198793119877311986231198791 cap 119862311987921198772 cap 11986231198792119877311986231198791 cap 119862311987921198772 cap 11986231198793119877311986231198791 cap 119862311987931198772 cap 119862311987931198773119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 Two are perp in 1198771205721 1198771205722 and 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 perp 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205732 1198771205723 and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 1198771205721 perp 1198771205722 and 1198771205721 perp 1198771205732
Proper subset is119862 = (119879119909 119879119910 119879119911 0 0 0)
119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 1198771205721 1198771205722 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205732 1198771205723
and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 Two is in 1198771205721 1198771205722 1198771205732119862311987911198771 cap 119862311987931198772 cap 119862311987931198773
No requirements119862311987921198771 cap 119862311987921198772 cap 119862311987931198773119862311987921198771 cap 119862311987931198772 cap 119862311987931198773119862311987931198771 cap 1198623T3R2 cap C3T3R3
Table 3 Common robots with 3 to 6 DOF
Branched chain Category Robots
C3T serial P1P2P3 R1R2R2parallel Delta 3-PRRR 3-RPS
C3T1R serial R1R2R2R3parallel 4-PU1U2
C3T2R serial R1R2R2R3R4parallel 5-RPUR
C3T3R serial Puma560 (6R)parallel Stewart (6-UPS)
1198781 = (0 0 0 0 0 1)1198782 = (0 0 0 0 1 0)1198783 = (0 0 0 1 0 0)
(20)
Its corresponding reciprocal screw is
1198781199031 = (0 0 0 0 0 1)1198781199032 = (0 0 0 0 1 0)1198781199033 = (0 0 0 1 0 0)
(21)
The 119862 set of the parallel robot 3-PRRR can be written as (22)If the base coordinate system of 3-PRRR is set to the worldcoordinate system o-xyz its 119862 set can be expressed as (23)
1198621 = (1198791199091 1198791199101 1198791199111 0 0 0) (22)
1198621 = (0 0 0 0 0 0) (23)
Similarly the kinematic screw system of the six DOF serialrobot is
6 Journal of Robotics
x
z
o y
A3
B3z0
A2
A1
x0
o0 y0
x1
C2
C3 o1
z1
C1 y1B1
B2
z1
x1
y1
o1
z0
x0
y0o0
z0
x0
y0
o0
z1
x1
y1o1
NO 3
NO 2
NO 1
Figure 2 Three robots transporting triangular goods in coordination
1198781 = (1 0 0 0 0 0)1198782 = (0 1 0 0 0 0)1198783 = (0 0 1 0 0 0)1198784 = (0 0 0 1 0 0)1198785 = (0 0 0 0 1 0)1198786 = (0 0 0 0 0 1)
(24)
For a 6-DOF serial robot it is obvious that the 119862 set of its endkinematic features can be described as
1198622 = (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722) (25)
where the six elements are nonzero According to (15) theend-features 119862 set of EPR can be described as
119862 = 1198621 cap 1198622 cap 1198623= (1198791199091 1198791199101 1198791199111 0 0 0)
cap (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722)
cap (1198791199093 1198791199103 1198791199113 1198771205743 1198771205733 1198771205723)
= (119879119909 119879119910 119879119911 0 0 0)
(26)
42 The Layout Design of the 3T EPR When multirobotswork in cooperative task the layout will have a direct
impact on the flexibility operation time and workspace ofthe multirobots system Therefore a reasonable layout isnecessary The method proposed in this paper is to use theminimum cycle time occupied area and condition numberof the EPR as the optimized objectives and their weightcoefficients are chosen according to specific requirements
As shown in Figure 2 the coordinate systems 1199000minus11990901199100119911011990010158400 minus 119909101584001199101015840011991110158400 and 119900101584010158400 minus 119909101584010158400 119910101584010158400 119911101584010158400 are set to the base coordinatesof No 1 No 2 and No 3 robots respectively The Cartesiancoordinate systems 1199001 minus119909111991011199111 11990010158401 minus119909101584011199101015840111991110158401 and 119900101584010158401 minus119909101584010158401 119910101584010158401 119911101584010158401are set to the moving coordinates of No 1 No 2 and No 3robots respectively 119900 minus 119909119910119911 is set to the coordinate systemfor the triangular goods and 1199000 minus 119909011991001199110 is also set to theworld coordinate system of the EPR system Assume that thestarting coordinate A of the No1 robotrsquos manipulator is (0202 03) and the ending coordinate B of its manipulator afterthe translation is (04 04 05)The DH parameters of the sixDOF serial robot are listed in Table 4 and the correspondingcoordinate systems of its linkages are shown in Figure 3
The task requirement is to move the goods from point Ato point B and optimize the layout of the EPR systemwith theminimum occupied area cycle time and condition number
The coordinate system of the EPR system is establishedand the schematic diagram is shown in Figure 4The circularmodules with colors represent the base of the three robotsand the triangle modules represent the hands of the robotsThe yellow pattern indicates the 3-PRRR parallel robot andthe green indicates the 6-DOF serial robot The coordinatesystem of EPR system is projected onto the xy plane of theworld coordinate system and the coordinate of each module
Journal of Robotics 7
x0
z0
y0
456 at the same point
x2
z2
y2
x1
z1
y1
x3
z3
y3
x4
z4y4
x5
z5
y5
x6
z6y6
xT
zTyT
0325
01
01017501065
03
065
Figure 3 Six DOF serial robot links coordinate system
0
(00)
(0202)
(1212)(12-08)
(1712)(17-08)
R=015
No1
No2No3
x2
x0
y2
x1
y1
y0
Figure 4 The coordinate systems diagram of the EPR layout
Table 4 Six DOF serial robot parameters of links
119894 120579i(rad) 119889119894(m) 119886119894minus1(m) 120572119894minus1(rad)1 1205791(-1205872) 0325 0 02 0 01 0 -12058723 1205793(-1205872) -01 0300 04 0 0405 0 -12058725 0 0 0 12058726 0 0 0 -1205872
8 Journal of Robotics
Start
T=1
T=T+1
trialgtLimit
Y
Initialization
Employed bees search
Following bees search
Scout bees search
N
Y
N
Output
T=Tmax
Figure 5 The flow chart of ABC algorithm
is as shown in Figure 4 It is worth noting that in the positionlayout of the robot the base coordinate system of the fixed3-PRRR is set as the world coordinate system and only thepositions of two six DOF serial robots can move
The mathematical form of the three optimized objectivesis described as follows
min 119910 = 119891 (119877 120579) = [119891119904 (119877 120579) 119891119905 (119877 120579) 119891119888 (119877 120579)]s t 0 le 119877 le 015
0 le 120579 le 2120587(27)
where 119891119904(119877 120579) represents the area optimized function119891119905(119877 120579) represents the time optimized function 119891119888(119877 120579)represents the condition number optimized function Inaddition the circle of radius 119877 and the rotation angle 120579 arethe movable range of the serial robots
The artificial bee colony (ABC) algorithm [23 24] is usedto optimize the multiobjective layout parameters and itsdetailed procedure can be depicted in Figure 5 Since the EPRmotion form belongs to the type of 3T the two six-DOF serialrobots (No 2 and No 3) keep the posture in the layout asshown in Figure 4
Assume that the maximum velocity of the parallel robot3-PRRRrsquos prismatic joint is v=25ms the maximum velocityof the serial robotrsquos rotational joint is120596=2120587rads and they runat the maximum velocity Since the condition number of 3-PRRR is always 1 and the operation status of two serial robotsis the same the condition number of EPR is equivalent to thecondition number of a serial robot As long as the conditionnumber of the serial robot is minimal the condition numberof EPR will be minimal
02 03 04 05 06 07 08 0901 1Cycle time (s)
155
16
165
17
175
18
185
Occ
upie
d ar
ea (m
lowastm
)
Figure 6 Scatter plot of cycle time and occupied area
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
16 165 18175 185155 17Occupied area (mlowastm)
Figure 7 Scatter plot of occupied area and condition number
Figures 6ndash8 show the plane distribution diagramsbetween cycle time occupied area and condition numberFigure 9 is a spatial distribution diagram of the threeobjectives set as spatial coordinate axesThemethod ofMonteCarlo is used to plot the diagrams in this paper It can beseen that the scatter plots between the three objectives arenot evenly distributedThe cycle timemainly concentrates onthe range of 035 to 055 and the condition number mainlyconcentrates on the range of 85 to 11 In general the conditionnumber increases when the occupied area increases
Different layout will affect the values of the three objec-tives and it is particularly important to choose the layoutlocation that meets the objective requirements Next theABC algorithm will be used to search for the optimal solutionaccording to the importance of its optimized objectives Theresults obtained are shown in Table 5 and the corresponding119862 set of each branched robot in the EPR is shown inTable 6 When a=1 b=0 and c=0 the minimum occupiedarea 119878min=15500m
2 can be obtained Similarly when a=0b=1 and c=0 the minimum cycle time 119879min=00903s andwhen a=0 b=0 and c=1 the condition number 119862min=84253As seen in Table 5 the values of the objectives decrease asthe weight coefficient increases which is consistent with theresults of multiobjective optimization From Table 6 the Csets of each group of branched robots represent their endkinematic features the position and the posture of theirlayout which greatly facilitates the selection and layout of themultirobots
Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Journal of Robotics
o
Tz
Tx
Ty
(a) Transnational features
O
R
R
R
(b) Rotational features
Figure 1 Description for the end-features of the 119862 set
synthesis to meet the operational requirements thus itsbranches will not change once they are laid out At presentthere are few relevant literatures on the layout of coordinatedmultirobots system It mainly depends on the actual experi-ence and cannot achieve the best results Michele Gadaleta etal proposed themethod for the energy-optimal layout designof robotic work cells which numerically retrieved the indus-trial robot base position to achieve the minimum energyconsumption [12] Zhen Yang Lim et al presented a layoutoptimization method for multirobots cellular manufacturingsystem and compared the effects of several algorithms on theoptimization results [13 14] However either the optimizedobjectives are too single or the result of optimization isonly an approximate areas It is not possible to give anaccurate layout according to the different operational tasksand the importance of the optimized objectives This paperproposes to use the minimum occupied area cycle timeand condition number as the optimized objectives Theweight coefficient is used to express the importance ofthe three objectives to meet the requirements for differentscenes of the tasks and the artificial bee colony (ABC)algorithm is used to optimize the multiobjective layoutproblem
The main contributions of this paper are as follows (a)The problem for the construction and layout optimization ofa coordinatedmultirobots system is transformed into the typesynthesis and layout of a parallel mechanism based on theparallel thought (b) The concept of C set is presented whichcan conveniently represent the end kinematic features (for therobot selection of multirobots) and the position and postureof the robot (c) The multiobjective layout optimizationmethod with weighted ratios is proposed and the minimumoccupied area cycle time and condition number are usedas the optimized objectives The remainder of this paper isorganized as follows In Section 2 the basic concept of robotic119862 set is given and corresponding intersection rule is analyzedIn Section 3 the minimum occupied area cycle time andcondition number are taken as optimized objectives for thelayout The selection and layout of a specific task (3T) aremainly designed in Section 4 Lastly Section 5 draws theconclusion
2 Characteristic Set and Its Intersection Rule
The characteristic (119862) set is used to describe the end-featureof a mechanism and the position and the posture of its base[11] as shown in
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 119877120574) (1)
where 119879119894 (119894 = 119909 119910 119911) represents the translational features ofrobotrsquos end-effector in the direction of 119909 119910 and 119911 and theposition of its base 119877119895 (119895 = 120572 120573 120574) represents the rotationalfeatures and the posture of its base They are just as shown inFigure 1
The meaning of the numerical values of the 119862 setrsquoselements is described in the literature [11] The followingexamples are illustrated
For example there is a four-DOF robot with two trans-lational features in the 119909 and 119910 directions and two rotationalfeatures rotating around the 119909 and 119910 axes which belongs to a2T2R robot If the world coordinate system is set as the basecoordinate system of the robot its 119862 set can be written as(0 0 0 0 0 0) If the position and posture of the robotrsquosbase coordinate system is not 0 relative to the world coordi-nate system (neither the coordinates nor the RPY angles are0) its 119862 set can be written as (119879119909 119879119910 119911 119877120572 119877120573 120574)
The operation of 119862 set includes intersection and unionand the intersection is suitable for parallelmechanism [15 16]It is can be defined in
119862 = 1198621 cap 1198622 = (119879119909 119879119910 119879119911 119877120572 119877120573 119877120574) (2)
where cap stands for the intersection operator
3 Layout of Multirobots
The layout optimization of a coordinated multirobots systemcan be considered as a parallel robot whose branched chainsrsquopositions are changed to achieve theminimumoccupied areacycle time and condition number
31 Occupied Area Reasonable layout will reduce the occu-pied area of the completely coordinatedmultirobots system inthe workshop [13] For a parallel robot the objective can beseen as the minimum of the static platform area by changing
Journal of Robotics 3
the position and the posture of its branches to meet therequired tasks The calculation method of the occupied areais that the graphic area formed by the plane where the base ofeach robot is located Moreover it can be calculated based onthe value of each robotrsquos 119862 set
32 Cycle Time In order to be more efficient the productionshop requires less time for the whole process Therefore ittakes minimal time for EPR to complete the task The cycletime of the EPR is determined by its rotation angle andthe maximum angular velocity The following equations arespecified
Assume that the angular velocity of the jth joint of Noirobot is 120596119895119894 In a cycle time T the continuous rotation angleof the jth joint is |120579119895119894 | and the time of the jth joint is
119879119895119894 =10038161003816100381610038161003816120579119895119894
10038161003816100381610038161003816120596119895119894
(119894 119895 = 1 2 119899) (3)
However the running time of each robotrsquos joint may bedifferent Now set the running time of Noi robot in the cycletime 119879 as
119879119894 = max (119879119895119894 ) (4)
During the cycle time T the simultaneous tasks run for
119879119904 = max (119879119894) (119904 = 1 2 119899) (5)
Therefore the total cycle time is the sum of the time for eachindependent task that is
119879 =119899
sum119904=1
119879119904 (6)
Similar to the EPR it is required to arrange the position andthe posture of each branch for a parallel robot reasonablyWhen the task is completed the branch with the longestconsumption time is considered as the minimum cycle time119879 of the parallel robot In the following sections the specificexample will be given
33 Condition Number For serial robots the statics per-formance index of robotrsquos flexibility is generally used byYoshikawarsquos manipulability index [17] That is
119908119895 = radic1003816100381610038161003816119869 (119902) 119869119879 (119902)1003816100381610038161003816 (7)
where 119869(119902) is the Jacobian matrix of the robot and 119869119879(119902) is theinverse of the Jacobian matrix However for a parallel robotthe condition number is often used as its performance index[18] In a highly coupledmultirobots cooperative system suchas multirobots transporting it can be seen as an EPR and itscondition number is [19]
120581 (119869) = 119869 10038171003817100381710038171003817119869minus110038171003817100381710038171003817 (8)
where 119869 is the norm of the Jacobian matrix 119869 and for the2-norm the condition number can be written as [20]
120581 (119869) = 120590max120590min
(9)
where 120590max and 120590min are the maximum and minimumsingular values of the Jacobian matrix 119869 respectively and therange of the condition number is 1 le 120581(119869) le infin
When designing a parallel robot the value of the condi-tion number should be 1 as far as possible [21] Because when120581(119869) = 1 the singular values are equal and the arm is in anisotropic configuration with the highest flexibility
34 Weight Fitness Layout optimization means that the rea-sonable layout is selected to meet the different requirementsIn this paper the minimum occupied area cycle time andcondition number are taken as the optimized objectivesof the layout However in actual situation one or twocombinations may be dominant Therefore the proportionof these three evaluation indicators is particularly importantand the weight ratio will be used to express the importance ofthe three indicators
The fitness of the area is expressed as
119891119894119905119886 =1
1 + (119878 minus 119878min) (10)
where 119878 is the occupied area and 119878min is the minimumoccupied area The fitness of the operation time is expressedas
119891119894119905119905 =1
1 + (119879 minus 119879min) (11)
where119879 is the cycle operation time and 119879min is the minimumcycle operation time The fitness of condition number isexpressed as
119891119894119905119888 =1
1 + (119873 minus 119873min) (12)
where119873 represents the condition number of the coordinatedmultirobots system and 119873min represents the minimum con-dition number
According to different operational requirements a rea-sonable weight ratio is designed to represent the importanceof the systemrsquos indicators
119891119894119905 = 119886119891119894119905119886 + 119887119891119894119905119905 + 119888119891119894119905119888 (13)
where 119886 119887 and 119888 are the weight coefficients and 119886 + 119887 +119888 = 1 Their values are determined by their importance Themore important a certain indicator is the greater its weightcoefficient is
The values of 119878min 119879min and 119873min in the above threeequations are obtained by ignoring the other two indicatorsFor example when 119878min is calculated only the area indicatoris considered and the requirement of the operation time andthe condition number are abandoned that is in the casewhere 119886 = 1 b = 0 and c = 0
To optimize the above-mentioned three objectives thefollowing assumptions are needed
(1) If there is a nonstatic robot in the system (the base canmove) its maximum moving area is set as the staticarea
4 Journal of Robotics
Table 1 The combinations of the branched robots with 3T motion
Chain1 Chain2 Chain3 Combinations Structure
11986231198791
11986231198792
11986231198793 11986231198791 cap 11986231198792 cap 11986231198793 symmetry119862311987911198773 11986231198791 cap 11986231198792 cap 119862311987911198773
asymmetry
119862311987921198773 11986231198791 cap 11986231198792 cap 119862311987921198773119862311987931198773 11986231198791 cap 11986231198792 cap 119862311987931198773
119862311987911198772119862311987911198773 11986231198791 cap 119862311987911198772 cap 119862311987911198773119862311987921198773 11986231198791 cap 119862311987911198772 cap 119862311987921198773119862311987931198773 11986231198791 cap 119862311987911198772 cap 119862311987931198773
119862311987921198772119862311987921198773 11986231198791 cap 119862311987921198772 cap 119862311987921198773119862311987931198773 11986231198791 cap 119862311987921198772 cap 119862311987931198773
119862311987931198772 119862311987931198773 11986231198791 cap 119862311987931198772 cap 119862311987931198773
119862311987911198771119862311987911198772
119862311987911198773 119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 symmetry119862311987921198773 119862311987911198771 cap 119862311987911198772 cap 119862311987921198773
asymmetry119862311987931198773 119862311987911198771 cap 119862311987911198772 cap 119862311987931198773119862311987921198772
119862311987921198773 119862311987911198771 cap 119862311987921198772 cap 119862311987921198773119862311987931198773 119862311987911198771 cap 119862311987921198772 cap 119862311987931198773
119862311987921198771 119862311987921198772 119862311987921198773 119862311987921198771 cap 119862311987921198772 cap 119862311987921198773 symmetry
(2) The moving point is set as the base coordinate pointof the robot
(3) Each joint runs at the maximum speed
4 Case Study
For example a procedure of a factoryrsquos production line needsto transport the goods with heavy or bulk from worktableA to worktable B (only involving the three-dimensionaltranslation of the space) However many small-load robotswith the same or different types cannot complete this taskalone Considering the cost savings no new heavy-loadrobot will be purchased At this time it is necessary tofilter and reorganize the existing robots in the factory andbuild a coordinated multirobots handling system composedof multiple robots
Next the above-mentioned type synthesis method andweight multiobjective optimization method will be usedin the chain selection and the layout design of the EPRseparately
41 The Selection of the 3T EPRrsquos Chains The 119862 set of the 3TEPRrsquos end-manipulator is expressed as follows
119862 = (119879119909 119879119910 119879119911 0 0 0) (14)
The literature [11] shows that the 119862 set of the EPRrsquos end-manipulator is determined by
119862 = 1198621 cap 1198622 cap 1198623 (15)
where 1198621 1198622 and 1198623 are the 119862 sets of the EPRrsquos three-branched robots respectively and the 119862 set of the branchedrobots can be expressed as
119862 = (119879119909 119879119910 119879119911 0 0 0) (16)
119862 = (119879119909 119879119910 119879119911 119877120572 0 0) (17)
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 0) (18)
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 119877120574) (19)
It can be seen from (15) that the 119862 set of the 3T EPR canbe obtained by the intersection of the 119862 sets for the abovethree-branched robots As seen in Table 1 there are sixteencombinations of the branched chains and the intersectionsmust satisfy (2)
The classification and the condition of the combinationsfrom Table 1 are listed in Table 2 According to the Table 1the intersection just as 119862 = (119879119909 119879119910 119879119911 0 0 0) has fifteencombinations and the proper subset of intersection just as119862 =(119879119909 119879119910 119879119911 0 0 0) has 9 combinations
Since each branched chain of EPR is an independentrobot it can be a parallel or serial robot The common robotswith 3 to 6 DOF are listed in Table 3
Then the combinations of the robots are selected to meetthe task requirements (3T) and the choice of this paper isthe combination of 11986231198791 cap 119862311987931198772 cap 119862311987931198773 That is a parallelrobot 3-PRRR and two six DOF serial robots are used asthe EPRrsquos branched chains to transport the goods as shownin Figure 2 The three pneumatic hands are fixed under themoving platform of the 3-PRRR and the end of the serialrobots to transport triangular goods In this process thethree hands contact the goods closely without any changein position and posture between them At this moment thegoods can be seen as a moving platform for the EPR and thethree robots are taken as the three-branched chains for theEPR The screw theory [22] is used to analyze the DOF ofEPR in the Equations (20) (21) and (24)
As shown in Figure 2 the parallel robot 3-PRRR iscomposed of a moving platform and a static platform whichare connected by the same three-branched chains It is notdifficult to see that the kinematic screw system of the parallelrobot 3-PRRR is
Journal of Robotics 5
Table 2 Classification for the combinations of the branched robots
Objectives Combinations Conditions
119862 = (119879119909 119879119910 119879119911 0 0 0)
11986231198791 cap 11986231198792 cap 11986231198793
No requirements
11986231198791 cap 11986231198792 cap 11986231198791119877311986231198791 cap 11986231198792 cap 11986231198792119877311986231198791 cap 11986231198792 cap 11986231198793119877311986231198791 cap 119862311987911198772 cap 11986231198791119877311986231198791 cap 119862311987911198772 cap 11986231198792119877311986231198791 cap 119862311987911198772 cap 11986231198793119877311986231198791 cap 119862311987921198772 cap 11986231198792119877311986231198791 cap 119862311987921198772 cap 11986231198793119877311986231198791 cap 119862311987931198772 cap 119862311987931198773119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 Two are perp in 1198771205721 1198771205722 and 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 perp 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205732 1198771205723 and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 1198771205721 perp 1198771205722 and 1198771205721 perp 1198771205732
Proper subset is119862 = (119879119909 119879119910 119879119911 0 0 0)
119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 1198771205721 1198771205722 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205732 1198771205723
and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 Two is in 1198771205721 1198771205722 1198771205732119862311987911198771 cap 119862311987931198772 cap 119862311987931198773
No requirements119862311987921198771 cap 119862311987921198772 cap 119862311987931198773119862311987921198771 cap 119862311987931198772 cap 119862311987931198773119862311987931198771 cap 1198623T3R2 cap C3T3R3
Table 3 Common robots with 3 to 6 DOF
Branched chain Category Robots
C3T serial P1P2P3 R1R2R2parallel Delta 3-PRRR 3-RPS
C3T1R serial R1R2R2R3parallel 4-PU1U2
C3T2R serial R1R2R2R3R4parallel 5-RPUR
C3T3R serial Puma560 (6R)parallel Stewart (6-UPS)
1198781 = (0 0 0 0 0 1)1198782 = (0 0 0 0 1 0)1198783 = (0 0 0 1 0 0)
(20)
Its corresponding reciprocal screw is
1198781199031 = (0 0 0 0 0 1)1198781199032 = (0 0 0 0 1 0)1198781199033 = (0 0 0 1 0 0)
(21)
The 119862 set of the parallel robot 3-PRRR can be written as (22)If the base coordinate system of 3-PRRR is set to the worldcoordinate system o-xyz its 119862 set can be expressed as (23)
1198621 = (1198791199091 1198791199101 1198791199111 0 0 0) (22)
1198621 = (0 0 0 0 0 0) (23)
Similarly the kinematic screw system of the six DOF serialrobot is
6 Journal of Robotics
x
z
o y
A3
B3z0
A2
A1
x0
o0 y0
x1
C2
C3 o1
z1
C1 y1B1
B2
z1
x1
y1
o1
z0
x0
y0o0
z0
x0
y0
o0
z1
x1
y1o1
NO 3
NO 2
NO 1
Figure 2 Three robots transporting triangular goods in coordination
1198781 = (1 0 0 0 0 0)1198782 = (0 1 0 0 0 0)1198783 = (0 0 1 0 0 0)1198784 = (0 0 0 1 0 0)1198785 = (0 0 0 0 1 0)1198786 = (0 0 0 0 0 1)
(24)
For a 6-DOF serial robot it is obvious that the 119862 set of its endkinematic features can be described as
1198622 = (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722) (25)
where the six elements are nonzero According to (15) theend-features 119862 set of EPR can be described as
119862 = 1198621 cap 1198622 cap 1198623= (1198791199091 1198791199101 1198791199111 0 0 0)
cap (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722)
cap (1198791199093 1198791199103 1198791199113 1198771205743 1198771205733 1198771205723)
= (119879119909 119879119910 119879119911 0 0 0)
(26)
42 The Layout Design of the 3T EPR When multirobotswork in cooperative task the layout will have a direct
impact on the flexibility operation time and workspace ofthe multirobots system Therefore a reasonable layout isnecessary The method proposed in this paper is to use theminimum cycle time occupied area and condition numberof the EPR as the optimized objectives and their weightcoefficients are chosen according to specific requirements
As shown in Figure 2 the coordinate systems 1199000minus11990901199100119911011990010158400 minus 119909101584001199101015840011991110158400 and 119900101584010158400 minus 119909101584010158400 119910101584010158400 119911101584010158400 are set to the base coordinatesof No 1 No 2 and No 3 robots respectively The Cartesiancoordinate systems 1199001 minus119909111991011199111 11990010158401 minus119909101584011199101015840111991110158401 and 119900101584010158401 minus119909101584010158401 119910101584010158401 119911101584010158401are set to the moving coordinates of No 1 No 2 and No 3robots respectively 119900 minus 119909119910119911 is set to the coordinate systemfor the triangular goods and 1199000 minus 119909011991001199110 is also set to theworld coordinate system of the EPR system Assume that thestarting coordinate A of the No1 robotrsquos manipulator is (0202 03) and the ending coordinate B of its manipulator afterthe translation is (04 04 05)The DH parameters of the sixDOF serial robot are listed in Table 4 and the correspondingcoordinate systems of its linkages are shown in Figure 3
The task requirement is to move the goods from point Ato point B and optimize the layout of the EPR systemwith theminimum occupied area cycle time and condition number
The coordinate system of the EPR system is establishedand the schematic diagram is shown in Figure 4The circularmodules with colors represent the base of the three robotsand the triangle modules represent the hands of the robotsThe yellow pattern indicates the 3-PRRR parallel robot andthe green indicates the 6-DOF serial robot The coordinatesystem of EPR system is projected onto the xy plane of theworld coordinate system and the coordinate of each module
Journal of Robotics 7
x0
z0
y0
456 at the same point
x2
z2
y2
x1
z1
y1
x3
z3
y3
x4
z4y4
x5
z5
y5
x6
z6y6
xT
zTyT
0325
01
01017501065
03
065
Figure 3 Six DOF serial robot links coordinate system
0
(00)
(0202)
(1212)(12-08)
(1712)(17-08)
R=015
No1
No2No3
x2
x0
y2
x1
y1
y0
Figure 4 The coordinate systems diagram of the EPR layout
Table 4 Six DOF serial robot parameters of links
119894 120579i(rad) 119889119894(m) 119886119894minus1(m) 120572119894minus1(rad)1 1205791(-1205872) 0325 0 02 0 01 0 -12058723 1205793(-1205872) -01 0300 04 0 0405 0 -12058725 0 0 0 12058726 0 0 0 -1205872
8 Journal of Robotics
Start
T=1
T=T+1
trialgtLimit
Y
Initialization
Employed bees search
Following bees search
Scout bees search
N
Y
N
Output
T=Tmax
Figure 5 The flow chart of ABC algorithm
is as shown in Figure 4 It is worth noting that in the positionlayout of the robot the base coordinate system of the fixed3-PRRR is set as the world coordinate system and only thepositions of two six DOF serial robots can move
The mathematical form of the three optimized objectivesis described as follows
min 119910 = 119891 (119877 120579) = [119891119904 (119877 120579) 119891119905 (119877 120579) 119891119888 (119877 120579)]s t 0 le 119877 le 015
0 le 120579 le 2120587(27)
where 119891119904(119877 120579) represents the area optimized function119891119905(119877 120579) represents the time optimized function 119891119888(119877 120579)represents the condition number optimized function Inaddition the circle of radius 119877 and the rotation angle 120579 arethe movable range of the serial robots
The artificial bee colony (ABC) algorithm [23 24] is usedto optimize the multiobjective layout parameters and itsdetailed procedure can be depicted in Figure 5 Since the EPRmotion form belongs to the type of 3T the two six-DOF serialrobots (No 2 and No 3) keep the posture in the layout asshown in Figure 4
Assume that the maximum velocity of the parallel robot3-PRRRrsquos prismatic joint is v=25ms the maximum velocityof the serial robotrsquos rotational joint is120596=2120587rads and they runat the maximum velocity Since the condition number of 3-PRRR is always 1 and the operation status of two serial robotsis the same the condition number of EPR is equivalent to thecondition number of a serial robot As long as the conditionnumber of the serial robot is minimal the condition numberof EPR will be minimal
02 03 04 05 06 07 08 0901 1Cycle time (s)
155
16
165
17
175
18
185
Occ
upie
d ar
ea (m
lowastm
)
Figure 6 Scatter plot of cycle time and occupied area
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
16 165 18175 185155 17Occupied area (mlowastm)
Figure 7 Scatter plot of occupied area and condition number
Figures 6ndash8 show the plane distribution diagramsbetween cycle time occupied area and condition numberFigure 9 is a spatial distribution diagram of the threeobjectives set as spatial coordinate axesThemethod ofMonteCarlo is used to plot the diagrams in this paper It can beseen that the scatter plots between the three objectives arenot evenly distributedThe cycle timemainly concentrates onthe range of 035 to 055 and the condition number mainlyconcentrates on the range of 85 to 11 In general the conditionnumber increases when the occupied area increases
Different layout will affect the values of the three objec-tives and it is particularly important to choose the layoutlocation that meets the objective requirements Next theABC algorithm will be used to search for the optimal solutionaccording to the importance of its optimized objectives Theresults obtained are shown in Table 5 and the corresponding119862 set of each branched robot in the EPR is shown inTable 6 When a=1 b=0 and c=0 the minimum occupiedarea 119878min=15500m
2 can be obtained Similarly when a=0b=1 and c=0 the minimum cycle time 119879min=00903s andwhen a=0 b=0 and c=1 the condition number 119862min=84253As seen in Table 5 the values of the objectives decrease asthe weight coefficient increases which is consistent with theresults of multiobjective optimization From Table 6 the Csets of each group of branched robots represent their endkinematic features the position and the posture of theirlayout which greatly facilitates the selection and layout of themultirobots
Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Robotics 3
the position and the posture of its branches to meet therequired tasks The calculation method of the occupied areais that the graphic area formed by the plane where the base ofeach robot is located Moreover it can be calculated based onthe value of each robotrsquos 119862 set
32 Cycle Time In order to be more efficient the productionshop requires less time for the whole process Therefore ittakes minimal time for EPR to complete the task The cycletime of the EPR is determined by its rotation angle andthe maximum angular velocity The following equations arespecified
Assume that the angular velocity of the jth joint of Noirobot is 120596119895119894 In a cycle time T the continuous rotation angleof the jth joint is |120579119895119894 | and the time of the jth joint is
119879119895119894 =10038161003816100381610038161003816120579119895119894
10038161003816100381610038161003816120596119895119894
(119894 119895 = 1 2 119899) (3)
However the running time of each robotrsquos joint may bedifferent Now set the running time of Noi robot in the cycletime 119879 as
119879119894 = max (119879119895119894 ) (4)
During the cycle time T the simultaneous tasks run for
119879119904 = max (119879119894) (119904 = 1 2 119899) (5)
Therefore the total cycle time is the sum of the time for eachindependent task that is
119879 =119899
sum119904=1
119879119904 (6)
Similar to the EPR it is required to arrange the position andthe posture of each branch for a parallel robot reasonablyWhen the task is completed the branch with the longestconsumption time is considered as the minimum cycle time119879 of the parallel robot In the following sections the specificexample will be given
33 Condition Number For serial robots the statics per-formance index of robotrsquos flexibility is generally used byYoshikawarsquos manipulability index [17] That is
119908119895 = radic1003816100381610038161003816119869 (119902) 119869119879 (119902)1003816100381610038161003816 (7)
where 119869(119902) is the Jacobian matrix of the robot and 119869119879(119902) is theinverse of the Jacobian matrix However for a parallel robotthe condition number is often used as its performance index[18] In a highly coupledmultirobots cooperative system suchas multirobots transporting it can be seen as an EPR and itscondition number is [19]
120581 (119869) = 119869 10038171003817100381710038171003817119869minus110038171003817100381710038171003817 (8)
where 119869 is the norm of the Jacobian matrix 119869 and for the2-norm the condition number can be written as [20]
120581 (119869) = 120590max120590min
(9)
where 120590max and 120590min are the maximum and minimumsingular values of the Jacobian matrix 119869 respectively and therange of the condition number is 1 le 120581(119869) le infin
When designing a parallel robot the value of the condi-tion number should be 1 as far as possible [21] Because when120581(119869) = 1 the singular values are equal and the arm is in anisotropic configuration with the highest flexibility
34 Weight Fitness Layout optimization means that the rea-sonable layout is selected to meet the different requirementsIn this paper the minimum occupied area cycle time andcondition number are taken as the optimized objectivesof the layout However in actual situation one or twocombinations may be dominant Therefore the proportionof these three evaluation indicators is particularly importantand the weight ratio will be used to express the importance ofthe three indicators
The fitness of the area is expressed as
119891119894119905119886 =1
1 + (119878 minus 119878min) (10)
where 119878 is the occupied area and 119878min is the minimumoccupied area The fitness of the operation time is expressedas
119891119894119905119905 =1
1 + (119879 minus 119879min) (11)
where119879 is the cycle operation time and 119879min is the minimumcycle operation time The fitness of condition number isexpressed as
119891119894119905119888 =1
1 + (119873 minus 119873min) (12)
where119873 represents the condition number of the coordinatedmultirobots system and 119873min represents the minimum con-dition number
According to different operational requirements a rea-sonable weight ratio is designed to represent the importanceof the systemrsquos indicators
119891119894119905 = 119886119891119894119905119886 + 119887119891119894119905119905 + 119888119891119894119905119888 (13)
where 119886 119887 and 119888 are the weight coefficients and 119886 + 119887 +119888 = 1 Their values are determined by their importance Themore important a certain indicator is the greater its weightcoefficient is
The values of 119878min 119879min and 119873min in the above threeequations are obtained by ignoring the other two indicatorsFor example when 119878min is calculated only the area indicatoris considered and the requirement of the operation time andthe condition number are abandoned that is in the casewhere 119886 = 1 b = 0 and c = 0
To optimize the above-mentioned three objectives thefollowing assumptions are needed
(1) If there is a nonstatic robot in the system (the base canmove) its maximum moving area is set as the staticarea
4 Journal of Robotics
Table 1 The combinations of the branched robots with 3T motion
Chain1 Chain2 Chain3 Combinations Structure
11986231198791
11986231198792
11986231198793 11986231198791 cap 11986231198792 cap 11986231198793 symmetry119862311987911198773 11986231198791 cap 11986231198792 cap 119862311987911198773
asymmetry
119862311987921198773 11986231198791 cap 11986231198792 cap 119862311987921198773119862311987931198773 11986231198791 cap 11986231198792 cap 119862311987931198773
119862311987911198772119862311987911198773 11986231198791 cap 119862311987911198772 cap 119862311987911198773119862311987921198773 11986231198791 cap 119862311987911198772 cap 119862311987921198773119862311987931198773 11986231198791 cap 119862311987911198772 cap 119862311987931198773
119862311987921198772119862311987921198773 11986231198791 cap 119862311987921198772 cap 119862311987921198773119862311987931198773 11986231198791 cap 119862311987921198772 cap 119862311987931198773
119862311987931198772 119862311987931198773 11986231198791 cap 119862311987931198772 cap 119862311987931198773
119862311987911198771119862311987911198772
119862311987911198773 119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 symmetry119862311987921198773 119862311987911198771 cap 119862311987911198772 cap 119862311987921198773
asymmetry119862311987931198773 119862311987911198771 cap 119862311987911198772 cap 119862311987931198773119862311987921198772
119862311987921198773 119862311987911198771 cap 119862311987921198772 cap 119862311987921198773119862311987931198773 119862311987911198771 cap 119862311987921198772 cap 119862311987931198773
119862311987921198771 119862311987921198772 119862311987921198773 119862311987921198771 cap 119862311987921198772 cap 119862311987921198773 symmetry
(2) The moving point is set as the base coordinate pointof the robot
(3) Each joint runs at the maximum speed
4 Case Study
For example a procedure of a factoryrsquos production line needsto transport the goods with heavy or bulk from worktableA to worktable B (only involving the three-dimensionaltranslation of the space) However many small-load robotswith the same or different types cannot complete this taskalone Considering the cost savings no new heavy-loadrobot will be purchased At this time it is necessary tofilter and reorganize the existing robots in the factory andbuild a coordinated multirobots handling system composedof multiple robots
Next the above-mentioned type synthesis method andweight multiobjective optimization method will be usedin the chain selection and the layout design of the EPRseparately
41 The Selection of the 3T EPRrsquos Chains The 119862 set of the 3TEPRrsquos end-manipulator is expressed as follows
119862 = (119879119909 119879119910 119879119911 0 0 0) (14)
The literature [11] shows that the 119862 set of the EPRrsquos end-manipulator is determined by
119862 = 1198621 cap 1198622 cap 1198623 (15)
where 1198621 1198622 and 1198623 are the 119862 sets of the EPRrsquos three-branched robots respectively and the 119862 set of the branchedrobots can be expressed as
119862 = (119879119909 119879119910 119879119911 0 0 0) (16)
119862 = (119879119909 119879119910 119879119911 119877120572 0 0) (17)
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 0) (18)
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 119877120574) (19)
It can be seen from (15) that the 119862 set of the 3T EPR canbe obtained by the intersection of the 119862 sets for the abovethree-branched robots As seen in Table 1 there are sixteencombinations of the branched chains and the intersectionsmust satisfy (2)
The classification and the condition of the combinationsfrom Table 1 are listed in Table 2 According to the Table 1the intersection just as 119862 = (119879119909 119879119910 119879119911 0 0 0) has fifteencombinations and the proper subset of intersection just as119862 =(119879119909 119879119910 119879119911 0 0 0) has 9 combinations
Since each branched chain of EPR is an independentrobot it can be a parallel or serial robot The common robotswith 3 to 6 DOF are listed in Table 3
Then the combinations of the robots are selected to meetthe task requirements (3T) and the choice of this paper isthe combination of 11986231198791 cap 119862311987931198772 cap 119862311987931198773 That is a parallelrobot 3-PRRR and two six DOF serial robots are used asthe EPRrsquos branched chains to transport the goods as shownin Figure 2 The three pneumatic hands are fixed under themoving platform of the 3-PRRR and the end of the serialrobots to transport triangular goods In this process thethree hands contact the goods closely without any changein position and posture between them At this moment thegoods can be seen as a moving platform for the EPR and thethree robots are taken as the three-branched chains for theEPR The screw theory [22] is used to analyze the DOF ofEPR in the Equations (20) (21) and (24)
As shown in Figure 2 the parallel robot 3-PRRR iscomposed of a moving platform and a static platform whichare connected by the same three-branched chains It is notdifficult to see that the kinematic screw system of the parallelrobot 3-PRRR is
Journal of Robotics 5
Table 2 Classification for the combinations of the branched robots
Objectives Combinations Conditions
119862 = (119879119909 119879119910 119879119911 0 0 0)
11986231198791 cap 11986231198792 cap 11986231198793
No requirements
11986231198791 cap 11986231198792 cap 11986231198791119877311986231198791 cap 11986231198792 cap 11986231198792119877311986231198791 cap 11986231198792 cap 11986231198793119877311986231198791 cap 119862311987911198772 cap 11986231198791119877311986231198791 cap 119862311987911198772 cap 11986231198792119877311986231198791 cap 119862311987911198772 cap 11986231198793119877311986231198791 cap 119862311987921198772 cap 11986231198792119877311986231198791 cap 119862311987921198772 cap 11986231198793119877311986231198791 cap 119862311987931198772 cap 119862311987931198773119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 Two are perp in 1198771205721 1198771205722 and 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 perp 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205732 1198771205723 and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 1198771205721 perp 1198771205722 and 1198771205721 perp 1198771205732
Proper subset is119862 = (119879119909 119879119910 119879119911 0 0 0)
119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 1198771205721 1198771205722 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205732 1198771205723
and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 Two is in 1198771205721 1198771205722 1198771205732119862311987911198771 cap 119862311987931198772 cap 119862311987931198773
No requirements119862311987921198771 cap 119862311987921198772 cap 119862311987931198773119862311987921198771 cap 119862311987931198772 cap 119862311987931198773119862311987931198771 cap 1198623T3R2 cap C3T3R3
Table 3 Common robots with 3 to 6 DOF
Branched chain Category Robots
C3T serial P1P2P3 R1R2R2parallel Delta 3-PRRR 3-RPS
C3T1R serial R1R2R2R3parallel 4-PU1U2
C3T2R serial R1R2R2R3R4parallel 5-RPUR
C3T3R serial Puma560 (6R)parallel Stewart (6-UPS)
1198781 = (0 0 0 0 0 1)1198782 = (0 0 0 0 1 0)1198783 = (0 0 0 1 0 0)
(20)
Its corresponding reciprocal screw is
1198781199031 = (0 0 0 0 0 1)1198781199032 = (0 0 0 0 1 0)1198781199033 = (0 0 0 1 0 0)
(21)
The 119862 set of the parallel robot 3-PRRR can be written as (22)If the base coordinate system of 3-PRRR is set to the worldcoordinate system o-xyz its 119862 set can be expressed as (23)
1198621 = (1198791199091 1198791199101 1198791199111 0 0 0) (22)
1198621 = (0 0 0 0 0 0) (23)
Similarly the kinematic screw system of the six DOF serialrobot is
6 Journal of Robotics
x
z
o y
A3
B3z0
A2
A1
x0
o0 y0
x1
C2
C3 o1
z1
C1 y1B1
B2
z1
x1
y1
o1
z0
x0
y0o0
z0
x0
y0
o0
z1
x1
y1o1
NO 3
NO 2
NO 1
Figure 2 Three robots transporting triangular goods in coordination
1198781 = (1 0 0 0 0 0)1198782 = (0 1 0 0 0 0)1198783 = (0 0 1 0 0 0)1198784 = (0 0 0 1 0 0)1198785 = (0 0 0 0 1 0)1198786 = (0 0 0 0 0 1)
(24)
For a 6-DOF serial robot it is obvious that the 119862 set of its endkinematic features can be described as
1198622 = (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722) (25)
where the six elements are nonzero According to (15) theend-features 119862 set of EPR can be described as
119862 = 1198621 cap 1198622 cap 1198623= (1198791199091 1198791199101 1198791199111 0 0 0)
cap (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722)
cap (1198791199093 1198791199103 1198791199113 1198771205743 1198771205733 1198771205723)
= (119879119909 119879119910 119879119911 0 0 0)
(26)
42 The Layout Design of the 3T EPR When multirobotswork in cooperative task the layout will have a direct
impact on the flexibility operation time and workspace ofthe multirobots system Therefore a reasonable layout isnecessary The method proposed in this paper is to use theminimum cycle time occupied area and condition numberof the EPR as the optimized objectives and their weightcoefficients are chosen according to specific requirements
As shown in Figure 2 the coordinate systems 1199000minus11990901199100119911011990010158400 minus 119909101584001199101015840011991110158400 and 119900101584010158400 minus 119909101584010158400 119910101584010158400 119911101584010158400 are set to the base coordinatesof No 1 No 2 and No 3 robots respectively The Cartesiancoordinate systems 1199001 minus119909111991011199111 11990010158401 minus119909101584011199101015840111991110158401 and 119900101584010158401 minus119909101584010158401 119910101584010158401 119911101584010158401are set to the moving coordinates of No 1 No 2 and No 3robots respectively 119900 minus 119909119910119911 is set to the coordinate systemfor the triangular goods and 1199000 minus 119909011991001199110 is also set to theworld coordinate system of the EPR system Assume that thestarting coordinate A of the No1 robotrsquos manipulator is (0202 03) and the ending coordinate B of its manipulator afterthe translation is (04 04 05)The DH parameters of the sixDOF serial robot are listed in Table 4 and the correspondingcoordinate systems of its linkages are shown in Figure 3
The task requirement is to move the goods from point Ato point B and optimize the layout of the EPR systemwith theminimum occupied area cycle time and condition number
The coordinate system of the EPR system is establishedand the schematic diagram is shown in Figure 4The circularmodules with colors represent the base of the three robotsand the triangle modules represent the hands of the robotsThe yellow pattern indicates the 3-PRRR parallel robot andthe green indicates the 6-DOF serial robot The coordinatesystem of EPR system is projected onto the xy plane of theworld coordinate system and the coordinate of each module
Journal of Robotics 7
x0
z0
y0
456 at the same point
x2
z2
y2
x1
z1
y1
x3
z3
y3
x4
z4y4
x5
z5
y5
x6
z6y6
xT
zTyT
0325
01
01017501065
03
065
Figure 3 Six DOF serial robot links coordinate system
0
(00)
(0202)
(1212)(12-08)
(1712)(17-08)
R=015
No1
No2No3
x2
x0
y2
x1
y1
y0
Figure 4 The coordinate systems diagram of the EPR layout
Table 4 Six DOF serial robot parameters of links
119894 120579i(rad) 119889119894(m) 119886119894minus1(m) 120572119894minus1(rad)1 1205791(-1205872) 0325 0 02 0 01 0 -12058723 1205793(-1205872) -01 0300 04 0 0405 0 -12058725 0 0 0 12058726 0 0 0 -1205872
8 Journal of Robotics
Start
T=1
T=T+1
trialgtLimit
Y
Initialization
Employed bees search
Following bees search
Scout bees search
N
Y
N
Output
T=Tmax
Figure 5 The flow chart of ABC algorithm
is as shown in Figure 4 It is worth noting that in the positionlayout of the robot the base coordinate system of the fixed3-PRRR is set as the world coordinate system and only thepositions of two six DOF serial robots can move
The mathematical form of the three optimized objectivesis described as follows
min 119910 = 119891 (119877 120579) = [119891119904 (119877 120579) 119891119905 (119877 120579) 119891119888 (119877 120579)]s t 0 le 119877 le 015
0 le 120579 le 2120587(27)
where 119891119904(119877 120579) represents the area optimized function119891119905(119877 120579) represents the time optimized function 119891119888(119877 120579)represents the condition number optimized function Inaddition the circle of radius 119877 and the rotation angle 120579 arethe movable range of the serial robots
The artificial bee colony (ABC) algorithm [23 24] is usedto optimize the multiobjective layout parameters and itsdetailed procedure can be depicted in Figure 5 Since the EPRmotion form belongs to the type of 3T the two six-DOF serialrobots (No 2 and No 3) keep the posture in the layout asshown in Figure 4
Assume that the maximum velocity of the parallel robot3-PRRRrsquos prismatic joint is v=25ms the maximum velocityof the serial robotrsquos rotational joint is120596=2120587rads and they runat the maximum velocity Since the condition number of 3-PRRR is always 1 and the operation status of two serial robotsis the same the condition number of EPR is equivalent to thecondition number of a serial robot As long as the conditionnumber of the serial robot is minimal the condition numberof EPR will be minimal
02 03 04 05 06 07 08 0901 1Cycle time (s)
155
16
165
17
175
18
185
Occ
upie
d ar
ea (m
lowastm
)
Figure 6 Scatter plot of cycle time and occupied area
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
16 165 18175 185155 17Occupied area (mlowastm)
Figure 7 Scatter plot of occupied area and condition number
Figures 6ndash8 show the plane distribution diagramsbetween cycle time occupied area and condition numberFigure 9 is a spatial distribution diagram of the threeobjectives set as spatial coordinate axesThemethod ofMonteCarlo is used to plot the diagrams in this paper It can beseen that the scatter plots between the three objectives arenot evenly distributedThe cycle timemainly concentrates onthe range of 035 to 055 and the condition number mainlyconcentrates on the range of 85 to 11 In general the conditionnumber increases when the occupied area increases
Different layout will affect the values of the three objec-tives and it is particularly important to choose the layoutlocation that meets the objective requirements Next theABC algorithm will be used to search for the optimal solutionaccording to the importance of its optimized objectives Theresults obtained are shown in Table 5 and the corresponding119862 set of each branched robot in the EPR is shown inTable 6 When a=1 b=0 and c=0 the minimum occupiedarea 119878min=15500m
2 can be obtained Similarly when a=0b=1 and c=0 the minimum cycle time 119879min=00903s andwhen a=0 b=0 and c=1 the condition number 119862min=84253As seen in Table 5 the values of the objectives decrease asthe weight coefficient increases which is consistent with theresults of multiobjective optimization From Table 6 the Csets of each group of branched robots represent their endkinematic features the position and the posture of theirlayout which greatly facilitates the selection and layout of themultirobots
Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Journal of Robotics
Table 1 The combinations of the branched robots with 3T motion
Chain1 Chain2 Chain3 Combinations Structure
11986231198791
11986231198792
11986231198793 11986231198791 cap 11986231198792 cap 11986231198793 symmetry119862311987911198773 11986231198791 cap 11986231198792 cap 119862311987911198773
asymmetry
119862311987921198773 11986231198791 cap 11986231198792 cap 119862311987921198773119862311987931198773 11986231198791 cap 11986231198792 cap 119862311987931198773
119862311987911198772119862311987911198773 11986231198791 cap 119862311987911198772 cap 119862311987911198773119862311987921198773 11986231198791 cap 119862311987911198772 cap 119862311987921198773119862311987931198773 11986231198791 cap 119862311987911198772 cap 119862311987931198773
119862311987921198772119862311987921198773 11986231198791 cap 119862311987921198772 cap 119862311987921198773119862311987931198773 11986231198791 cap 119862311987921198772 cap 119862311987931198773
119862311987931198772 119862311987931198773 11986231198791 cap 119862311987931198772 cap 119862311987931198773
119862311987911198771119862311987911198772
119862311987911198773 119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 symmetry119862311987921198773 119862311987911198771 cap 119862311987911198772 cap 119862311987921198773
asymmetry119862311987931198773 119862311987911198771 cap 119862311987911198772 cap 119862311987931198773119862311987921198772
119862311987921198773 119862311987911198771 cap 119862311987921198772 cap 119862311987921198773119862311987931198773 119862311987911198771 cap 119862311987921198772 cap 119862311987931198773
119862311987921198771 119862311987921198772 119862311987921198773 119862311987921198771 cap 119862311987921198772 cap 119862311987921198773 symmetry
(2) The moving point is set as the base coordinate pointof the robot
(3) Each joint runs at the maximum speed
4 Case Study
For example a procedure of a factoryrsquos production line needsto transport the goods with heavy or bulk from worktableA to worktable B (only involving the three-dimensionaltranslation of the space) However many small-load robotswith the same or different types cannot complete this taskalone Considering the cost savings no new heavy-loadrobot will be purchased At this time it is necessary tofilter and reorganize the existing robots in the factory andbuild a coordinated multirobots handling system composedof multiple robots
Next the above-mentioned type synthesis method andweight multiobjective optimization method will be usedin the chain selection and the layout design of the EPRseparately
41 The Selection of the 3T EPRrsquos Chains The 119862 set of the 3TEPRrsquos end-manipulator is expressed as follows
119862 = (119879119909 119879119910 119879119911 0 0 0) (14)
The literature [11] shows that the 119862 set of the EPRrsquos end-manipulator is determined by
119862 = 1198621 cap 1198622 cap 1198623 (15)
where 1198621 1198622 and 1198623 are the 119862 sets of the EPRrsquos three-branched robots respectively and the 119862 set of the branchedrobots can be expressed as
119862 = (119879119909 119879119910 119879119911 0 0 0) (16)
119862 = (119879119909 119879119910 119879119911 119877120572 0 0) (17)
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 0) (18)
119862 = (119879119909 119879119910 119879119911 119877120572 119877120573 119877120574) (19)
It can be seen from (15) that the 119862 set of the 3T EPR canbe obtained by the intersection of the 119862 sets for the abovethree-branched robots As seen in Table 1 there are sixteencombinations of the branched chains and the intersectionsmust satisfy (2)
The classification and the condition of the combinationsfrom Table 1 are listed in Table 2 According to the Table 1the intersection just as 119862 = (119879119909 119879119910 119879119911 0 0 0) has fifteencombinations and the proper subset of intersection just as119862 =(119879119909 119879119910 119879119911 0 0 0) has 9 combinations
Since each branched chain of EPR is an independentrobot it can be a parallel or serial robot The common robotswith 3 to 6 DOF are listed in Table 3
Then the combinations of the robots are selected to meetthe task requirements (3T) and the choice of this paper isthe combination of 11986231198791 cap 119862311987931198772 cap 119862311987931198773 That is a parallelrobot 3-PRRR and two six DOF serial robots are used asthe EPRrsquos branched chains to transport the goods as shownin Figure 2 The three pneumatic hands are fixed under themoving platform of the 3-PRRR and the end of the serialrobots to transport triangular goods In this process thethree hands contact the goods closely without any changein position and posture between them At this moment thegoods can be seen as a moving platform for the EPR and thethree robots are taken as the three-branched chains for theEPR The screw theory [22] is used to analyze the DOF ofEPR in the Equations (20) (21) and (24)
As shown in Figure 2 the parallel robot 3-PRRR iscomposed of a moving platform and a static platform whichare connected by the same three-branched chains It is notdifficult to see that the kinematic screw system of the parallelrobot 3-PRRR is
Journal of Robotics 5
Table 2 Classification for the combinations of the branched robots
Objectives Combinations Conditions
119862 = (119879119909 119879119910 119879119911 0 0 0)
11986231198791 cap 11986231198792 cap 11986231198793
No requirements
11986231198791 cap 11986231198792 cap 11986231198791119877311986231198791 cap 11986231198792 cap 11986231198792119877311986231198791 cap 11986231198792 cap 11986231198793119877311986231198791 cap 119862311987911198772 cap 11986231198791119877311986231198791 cap 119862311987911198772 cap 11986231198792119877311986231198791 cap 119862311987911198772 cap 11986231198793119877311986231198791 cap 119862311987921198772 cap 11986231198792119877311986231198791 cap 119862311987921198772 cap 11986231198793119877311986231198791 cap 119862311987931198772 cap 119862311987931198773119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 Two are perp in 1198771205721 1198771205722 and 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 perp 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205732 1198771205723 and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 1198771205721 perp 1198771205722 and 1198771205721 perp 1198771205732
Proper subset is119862 = (119879119909 119879119910 119879119911 0 0 0)
119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 1198771205721 1198771205722 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205732 1198771205723
and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 Two is in 1198771205721 1198771205722 1198771205732119862311987911198771 cap 119862311987931198772 cap 119862311987931198773
No requirements119862311987921198771 cap 119862311987921198772 cap 119862311987931198773119862311987921198771 cap 119862311987931198772 cap 119862311987931198773119862311987931198771 cap 1198623T3R2 cap C3T3R3
Table 3 Common robots with 3 to 6 DOF
Branched chain Category Robots
C3T serial P1P2P3 R1R2R2parallel Delta 3-PRRR 3-RPS
C3T1R serial R1R2R2R3parallel 4-PU1U2
C3T2R serial R1R2R2R3R4parallel 5-RPUR
C3T3R serial Puma560 (6R)parallel Stewart (6-UPS)
1198781 = (0 0 0 0 0 1)1198782 = (0 0 0 0 1 0)1198783 = (0 0 0 1 0 0)
(20)
Its corresponding reciprocal screw is
1198781199031 = (0 0 0 0 0 1)1198781199032 = (0 0 0 0 1 0)1198781199033 = (0 0 0 1 0 0)
(21)
The 119862 set of the parallel robot 3-PRRR can be written as (22)If the base coordinate system of 3-PRRR is set to the worldcoordinate system o-xyz its 119862 set can be expressed as (23)
1198621 = (1198791199091 1198791199101 1198791199111 0 0 0) (22)
1198621 = (0 0 0 0 0 0) (23)
Similarly the kinematic screw system of the six DOF serialrobot is
6 Journal of Robotics
x
z
o y
A3
B3z0
A2
A1
x0
o0 y0
x1
C2
C3 o1
z1
C1 y1B1
B2
z1
x1
y1
o1
z0
x0
y0o0
z0
x0
y0
o0
z1
x1
y1o1
NO 3
NO 2
NO 1
Figure 2 Three robots transporting triangular goods in coordination
1198781 = (1 0 0 0 0 0)1198782 = (0 1 0 0 0 0)1198783 = (0 0 1 0 0 0)1198784 = (0 0 0 1 0 0)1198785 = (0 0 0 0 1 0)1198786 = (0 0 0 0 0 1)
(24)
For a 6-DOF serial robot it is obvious that the 119862 set of its endkinematic features can be described as
1198622 = (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722) (25)
where the six elements are nonzero According to (15) theend-features 119862 set of EPR can be described as
119862 = 1198621 cap 1198622 cap 1198623= (1198791199091 1198791199101 1198791199111 0 0 0)
cap (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722)
cap (1198791199093 1198791199103 1198791199113 1198771205743 1198771205733 1198771205723)
= (119879119909 119879119910 119879119911 0 0 0)
(26)
42 The Layout Design of the 3T EPR When multirobotswork in cooperative task the layout will have a direct
impact on the flexibility operation time and workspace ofthe multirobots system Therefore a reasonable layout isnecessary The method proposed in this paper is to use theminimum cycle time occupied area and condition numberof the EPR as the optimized objectives and their weightcoefficients are chosen according to specific requirements
As shown in Figure 2 the coordinate systems 1199000minus11990901199100119911011990010158400 minus 119909101584001199101015840011991110158400 and 119900101584010158400 minus 119909101584010158400 119910101584010158400 119911101584010158400 are set to the base coordinatesof No 1 No 2 and No 3 robots respectively The Cartesiancoordinate systems 1199001 minus119909111991011199111 11990010158401 minus119909101584011199101015840111991110158401 and 119900101584010158401 minus119909101584010158401 119910101584010158401 119911101584010158401are set to the moving coordinates of No 1 No 2 and No 3robots respectively 119900 minus 119909119910119911 is set to the coordinate systemfor the triangular goods and 1199000 minus 119909011991001199110 is also set to theworld coordinate system of the EPR system Assume that thestarting coordinate A of the No1 robotrsquos manipulator is (0202 03) and the ending coordinate B of its manipulator afterthe translation is (04 04 05)The DH parameters of the sixDOF serial robot are listed in Table 4 and the correspondingcoordinate systems of its linkages are shown in Figure 3
The task requirement is to move the goods from point Ato point B and optimize the layout of the EPR systemwith theminimum occupied area cycle time and condition number
The coordinate system of the EPR system is establishedand the schematic diagram is shown in Figure 4The circularmodules with colors represent the base of the three robotsand the triangle modules represent the hands of the robotsThe yellow pattern indicates the 3-PRRR parallel robot andthe green indicates the 6-DOF serial robot The coordinatesystem of EPR system is projected onto the xy plane of theworld coordinate system and the coordinate of each module
Journal of Robotics 7
x0
z0
y0
456 at the same point
x2
z2
y2
x1
z1
y1
x3
z3
y3
x4
z4y4
x5
z5
y5
x6
z6y6
xT
zTyT
0325
01
01017501065
03
065
Figure 3 Six DOF serial robot links coordinate system
0
(00)
(0202)
(1212)(12-08)
(1712)(17-08)
R=015
No1
No2No3
x2
x0
y2
x1
y1
y0
Figure 4 The coordinate systems diagram of the EPR layout
Table 4 Six DOF serial robot parameters of links
119894 120579i(rad) 119889119894(m) 119886119894minus1(m) 120572119894minus1(rad)1 1205791(-1205872) 0325 0 02 0 01 0 -12058723 1205793(-1205872) -01 0300 04 0 0405 0 -12058725 0 0 0 12058726 0 0 0 -1205872
8 Journal of Robotics
Start
T=1
T=T+1
trialgtLimit
Y
Initialization
Employed bees search
Following bees search
Scout bees search
N
Y
N
Output
T=Tmax
Figure 5 The flow chart of ABC algorithm
is as shown in Figure 4 It is worth noting that in the positionlayout of the robot the base coordinate system of the fixed3-PRRR is set as the world coordinate system and only thepositions of two six DOF serial robots can move
The mathematical form of the three optimized objectivesis described as follows
min 119910 = 119891 (119877 120579) = [119891119904 (119877 120579) 119891119905 (119877 120579) 119891119888 (119877 120579)]s t 0 le 119877 le 015
0 le 120579 le 2120587(27)
where 119891119904(119877 120579) represents the area optimized function119891119905(119877 120579) represents the time optimized function 119891119888(119877 120579)represents the condition number optimized function Inaddition the circle of radius 119877 and the rotation angle 120579 arethe movable range of the serial robots
The artificial bee colony (ABC) algorithm [23 24] is usedto optimize the multiobjective layout parameters and itsdetailed procedure can be depicted in Figure 5 Since the EPRmotion form belongs to the type of 3T the two six-DOF serialrobots (No 2 and No 3) keep the posture in the layout asshown in Figure 4
Assume that the maximum velocity of the parallel robot3-PRRRrsquos prismatic joint is v=25ms the maximum velocityof the serial robotrsquos rotational joint is120596=2120587rads and they runat the maximum velocity Since the condition number of 3-PRRR is always 1 and the operation status of two serial robotsis the same the condition number of EPR is equivalent to thecondition number of a serial robot As long as the conditionnumber of the serial robot is minimal the condition numberof EPR will be minimal
02 03 04 05 06 07 08 0901 1Cycle time (s)
155
16
165
17
175
18
185
Occ
upie
d ar
ea (m
lowastm
)
Figure 6 Scatter plot of cycle time and occupied area
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
16 165 18175 185155 17Occupied area (mlowastm)
Figure 7 Scatter plot of occupied area and condition number
Figures 6ndash8 show the plane distribution diagramsbetween cycle time occupied area and condition numberFigure 9 is a spatial distribution diagram of the threeobjectives set as spatial coordinate axesThemethod ofMonteCarlo is used to plot the diagrams in this paper It can beseen that the scatter plots between the three objectives arenot evenly distributedThe cycle timemainly concentrates onthe range of 035 to 055 and the condition number mainlyconcentrates on the range of 85 to 11 In general the conditionnumber increases when the occupied area increases
Different layout will affect the values of the three objec-tives and it is particularly important to choose the layoutlocation that meets the objective requirements Next theABC algorithm will be used to search for the optimal solutionaccording to the importance of its optimized objectives Theresults obtained are shown in Table 5 and the corresponding119862 set of each branched robot in the EPR is shown inTable 6 When a=1 b=0 and c=0 the minimum occupiedarea 119878min=15500m
2 can be obtained Similarly when a=0b=1 and c=0 the minimum cycle time 119879min=00903s andwhen a=0 b=0 and c=1 the condition number 119862min=84253As seen in Table 5 the values of the objectives decrease asthe weight coefficient increases which is consistent with theresults of multiobjective optimization From Table 6 the Csets of each group of branched robots represent their endkinematic features the position and the posture of theirlayout which greatly facilitates the selection and layout of themultirobots
Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Robotics 5
Table 2 Classification for the combinations of the branched robots
Objectives Combinations Conditions
119862 = (119879119909 119879119910 119879119911 0 0 0)
11986231198791 cap 11986231198792 cap 11986231198793
No requirements
11986231198791 cap 11986231198792 cap 11986231198791119877311986231198791 cap 11986231198792 cap 11986231198792119877311986231198791 cap 11986231198792 cap 11986231198793119877311986231198791 cap 119862311987911198772 cap 11986231198791119877311986231198791 cap 119862311987911198772 cap 11986231198792119877311986231198791 cap 119862311987911198772 cap 11986231198793119877311986231198791 cap 119862311987921198772 cap 11986231198792119877311986231198791 cap 119862311987921198772 cap 11986231198793119877311986231198791 cap 119862311987931198772 cap 119862311987931198773119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 Two are perp in 1198771205721 1198771205722 and 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 perp 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three cannot appear in 1198771205721
1198771205722 1198771205732 1198771205723 and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 1198771205721 perp 1198771205722 and 1198771205721 perp 1198771205732
Proper subset is119862 = (119879119909 119879119910 119879119911 0 0 0)
119862311987911198771 cap 119862311987911198772 cap 119862311987911198773 1198771205721 1198771205722 1198771205723119862311987911198771 cap 119862311987911198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205723 and 1198771205733119862311987911198771 cap 119862311987911198772 cap 119862311987931198773 1198771205721 1198771205722119862311987911198771 cap 119862311987921198772 cap 119862311987921198773 Three is in 1198771205721 1198771205722 1198771205732 1198771205723
and 1198771205733119862311987911198771 cap 119862311987921198772 cap 119862311987931198773 Two is in 1198771205721 1198771205722 1198771205732119862311987911198771 cap 119862311987931198772 cap 119862311987931198773
No requirements119862311987921198771 cap 119862311987921198772 cap 119862311987931198773119862311987921198771 cap 119862311987931198772 cap 119862311987931198773119862311987931198771 cap 1198623T3R2 cap C3T3R3
Table 3 Common robots with 3 to 6 DOF
Branched chain Category Robots
C3T serial P1P2P3 R1R2R2parallel Delta 3-PRRR 3-RPS
C3T1R serial R1R2R2R3parallel 4-PU1U2
C3T2R serial R1R2R2R3R4parallel 5-RPUR
C3T3R serial Puma560 (6R)parallel Stewart (6-UPS)
1198781 = (0 0 0 0 0 1)1198782 = (0 0 0 0 1 0)1198783 = (0 0 0 1 0 0)
(20)
Its corresponding reciprocal screw is
1198781199031 = (0 0 0 0 0 1)1198781199032 = (0 0 0 0 1 0)1198781199033 = (0 0 0 1 0 0)
(21)
The 119862 set of the parallel robot 3-PRRR can be written as (22)If the base coordinate system of 3-PRRR is set to the worldcoordinate system o-xyz its 119862 set can be expressed as (23)
1198621 = (1198791199091 1198791199101 1198791199111 0 0 0) (22)
1198621 = (0 0 0 0 0 0) (23)
Similarly the kinematic screw system of the six DOF serialrobot is
6 Journal of Robotics
x
z
o y
A3
B3z0
A2
A1
x0
o0 y0
x1
C2
C3 o1
z1
C1 y1B1
B2
z1
x1
y1
o1
z0
x0
y0o0
z0
x0
y0
o0
z1
x1
y1o1
NO 3
NO 2
NO 1
Figure 2 Three robots transporting triangular goods in coordination
1198781 = (1 0 0 0 0 0)1198782 = (0 1 0 0 0 0)1198783 = (0 0 1 0 0 0)1198784 = (0 0 0 1 0 0)1198785 = (0 0 0 0 1 0)1198786 = (0 0 0 0 0 1)
(24)
For a 6-DOF serial robot it is obvious that the 119862 set of its endkinematic features can be described as
1198622 = (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722) (25)
where the six elements are nonzero According to (15) theend-features 119862 set of EPR can be described as
119862 = 1198621 cap 1198622 cap 1198623= (1198791199091 1198791199101 1198791199111 0 0 0)
cap (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722)
cap (1198791199093 1198791199103 1198791199113 1198771205743 1198771205733 1198771205723)
= (119879119909 119879119910 119879119911 0 0 0)
(26)
42 The Layout Design of the 3T EPR When multirobotswork in cooperative task the layout will have a direct
impact on the flexibility operation time and workspace ofthe multirobots system Therefore a reasonable layout isnecessary The method proposed in this paper is to use theminimum cycle time occupied area and condition numberof the EPR as the optimized objectives and their weightcoefficients are chosen according to specific requirements
As shown in Figure 2 the coordinate systems 1199000minus11990901199100119911011990010158400 minus 119909101584001199101015840011991110158400 and 119900101584010158400 minus 119909101584010158400 119910101584010158400 119911101584010158400 are set to the base coordinatesof No 1 No 2 and No 3 robots respectively The Cartesiancoordinate systems 1199001 minus119909111991011199111 11990010158401 minus119909101584011199101015840111991110158401 and 119900101584010158401 minus119909101584010158401 119910101584010158401 119911101584010158401are set to the moving coordinates of No 1 No 2 and No 3robots respectively 119900 minus 119909119910119911 is set to the coordinate systemfor the triangular goods and 1199000 minus 119909011991001199110 is also set to theworld coordinate system of the EPR system Assume that thestarting coordinate A of the No1 robotrsquos manipulator is (0202 03) and the ending coordinate B of its manipulator afterthe translation is (04 04 05)The DH parameters of the sixDOF serial robot are listed in Table 4 and the correspondingcoordinate systems of its linkages are shown in Figure 3
The task requirement is to move the goods from point Ato point B and optimize the layout of the EPR systemwith theminimum occupied area cycle time and condition number
The coordinate system of the EPR system is establishedand the schematic diagram is shown in Figure 4The circularmodules with colors represent the base of the three robotsand the triangle modules represent the hands of the robotsThe yellow pattern indicates the 3-PRRR parallel robot andthe green indicates the 6-DOF serial robot The coordinatesystem of EPR system is projected onto the xy plane of theworld coordinate system and the coordinate of each module
Journal of Robotics 7
x0
z0
y0
456 at the same point
x2
z2
y2
x1
z1
y1
x3
z3
y3
x4
z4y4
x5
z5
y5
x6
z6y6
xT
zTyT
0325
01
01017501065
03
065
Figure 3 Six DOF serial robot links coordinate system
0
(00)
(0202)
(1212)(12-08)
(1712)(17-08)
R=015
No1
No2No3
x2
x0
y2
x1
y1
y0
Figure 4 The coordinate systems diagram of the EPR layout
Table 4 Six DOF serial robot parameters of links
119894 120579i(rad) 119889119894(m) 119886119894minus1(m) 120572119894minus1(rad)1 1205791(-1205872) 0325 0 02 0 01 0 -12058723 1205793(-1205872) -01 0300 04 0 0405 0 -12058725 0 0 0 12058726 0 0 0 -1205872
8 Journal of Robotics
Start
T=1
T=T+1
trialgtLimit
Y
Initialization
Employed bees search
Following bees search
Scout bees search
N
Y
N
Output
T=Tmax
Figure 5 The flow chart of ABC algorithm
is as shown in Figure 4 It is worth noting that in the positionlayout of the robot the base coordinate system of the fixed3-PRRR is set as the world coordinate system and only thepositions of two six DOF serial robots can move
The mathematical form of the three optimized objectivesis described as follows
min 119910 = 119891 (119877 120579) = [119891119904 (119877 120579) 119891119905 (119877 120579) 119891119888 (119877 120579)]s t 0 le 119877 le 015
0 le 120579 le 2120587(27)
where 119891119904(119877 120579) represents the area optimized function119891119905(119877 120579) represents the time optimized function 119891119888(119877 120579)represents the condition number optimized function Inaddition the circle of radius 119877 and the rotation angle 120579 arethe movable range of the serial robots
The artificial bee colony (ABC) algorithm [23 24] is usedto optimize the multiobjective layout parameters and itsdetailed procedure can be depicted in Figure 5 Since the EPRmotion form belongs to the type of 3T the two six-DOF serialrobots (No 2 and No 3) keep the posture in the layout asshown in Figure 4
Assume that the maximum velocity of the parallel robot3-PRRRrsquos prismatic joint is v=25ms the maximum velocityof the serial robotrsquos rotational joint is120596=2120587rads and they runat the maximum velocity Since the condition number of 3-PRRR is always 1 and the operation status of two serial robotsis the same the condition number of EPR is equivalent to thecondition number of a serial robot As long as the conditionnumber of the serial robot is minimal the condition numberof EPR will be minimal
02 03 04 05 06 07 08 0901 1Cycle time (s)
155
16
165
17
175
18
185
Occ
upie
d ar
ea (m
lowastm
)
Figure 6 Scatter plot of cycle time and occupied area
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
16 165 18175 185155 17Occupied area (mlowastm)
Figure 7 Scatter plot of occupied area and condition number
Figures 6ndash8 show the plane distribution diagramsbetween cycle time occupied area and condition numberFigure 9 is a spatial distribution diagram of the threeobjectives set as spatial coordinate axesThemethod ofMonteCarlo is used to plot the diagrams in this paper It can beseen that the scatter plots between the three objectives arenot evenly distributedThe cycle timemainly concentrates onthe range of 035 to 055 and the condition number mainlyconcentrates on the range of 85 to 11 In general the conditionnumber increases when the occupied area increases
Different layout will affect the values of the three objec-tives and it is particularly important to choose the layoutlocation that meets the objective requirements Next theABC algorithm will be used to search for the optimal solutionaccording to the importance of its optimized objectives Theresults obtained are shown in Table 5 and the corresponding119862 set of each branched robot in the EPR is shown inTable 6 When a=1 b=0 and c=0 the minimum occupiedarea 119878min=15500m
2 can be obtained Similarly when a=0b=1 and c=0 the minimum cycle time 119879min=00903s andwhen a=0 b=0 and c=1 the condition number 119862min=84253As seen in Table 5 the values of the objectives decrease asthe weight coefficient increases which is consistent with theresults of multiobjective optimization From Table 6 the Csets of each group of branched robots represent their endkinematic features the position and the posture of theirlayout which greatly facilitates the selection and layout of themultirobots
Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

6 Journal of Robotics
x
z
o y
A3
B3z0
A2
A1
x0
o0 y0
x1
C2
C3 o1
z1
C1 y1B1
B2
z1
x1
y1
o1
z0
x0
y0o0
z0
x0
y0
o0
z1
x1
y1o1
NO 3
NO 2
NO 1
Figure 2 Three robots transporting triangular goods in coordination
1198781 = (1 0 0 0 0 0)1198782 = (0 1 0 0 0 0)1198783 = (0 0 1 0 0 0)1198784 = (0 0 0 1 0 0)1198785 = (0 0 0 0 1 0)1198786 = (0 0 0 0 0 1)
(24)
For a 6-DOF serial robot it is obvious that the 119862 set of its endkinematic features can be described as
1198622 = (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722) (25)
where the six elements are nonzero According to (15) theend-features 119862 set of EPR can be described as
119862 = 1198621 cap 1198622 cap 1198623= (1198791199091 1198791199101 1198791199111 0 0 0)
cap (1198791199092 1198791199102 1198791199112 1198771205742 1198771205732 1198771205722)
cap (1198791199093 1198791199103 1198791199113 1198771205743 1198771205733 1198771205723)
= (119879119909 119879119910 119879119911 0 0 0)
(26)
42 The Layout Design of the 3T EPR When multirobotswork in cooperative task the layout will have a direct
impact on the flexibility operation time and workspace ofthe multirobots system Therefore a reasonable layout isnecessary The method proposed in this paper is to use theminimum cycle time occupied area and condition numberof the EPR as the optimized objectives and their weightcoefficients are chosen according to specific requirements
As shown in Figure 2 the coordinate systems 1199000minus11990901199100119911011990010158400 minus 119909101584001199101015840011991110158400 and 119900101584010158400 minus 119909101584010158400 119910101584010158400 119911101584010158400 are set to the base coordinatesof No 1 No 2 and No 3 robots respectively The Cartesiancoordinate systems 1199001 minus119909111991011199111 11990010158401 minus119909101584011199101015840111991110158401 and 119900101584010158401 minus119909101584010158401 119910101584010158401 119911101584010158401are set to the moving coordinates of No 1 No 2 and No 3robots respectively 119900 minus 119909119910119911 is set to the coordinate systemfor the triangular goods and 1199000 minus 119909011991001199110 is also set to theworld coordinate system of the EPR system Assume that thestarting coordinate A of the No1 robotrsquos manipulator is (0202 03) and the ending coordinate B of its manipulator afterthe translation is (04 04 05)The DH parameters of the sixDOF serial robot are listed in Table 4 and the correspondingcoordinate systems of its linkages are shown in Figure 3
The task requirement is to move the goods from point Ato point B and optimize the layout of the EPR systemwith theminimum occupied area cycle time and condition number
The coordinate system of the EPR system is establishedand the schematic diagram is shown in Figure 4The circularmodules with colors represent the base of the three robotsand the triangle modules represent the hands of the robotsThe yellow pattern indicates the 3-PRRR parallel robot andthe green indicates the 6-DOF serial robot The coordinatesystem of EPR system is projected onto the xy plane of theworld coordinate system and the coordinate of each module
Journal of Robotics 7
x0
z0
y0
456 at the same point
x2
z2
y2
x1
z1
y1
x3
z3
y3
x4
z4y4
x5
z5
y5
x6
z6y6
xT
zTyT
0325
01
01017501065
03
065
Figure 3 Six DOF serial robot links coordinate system
0
(00)
(0202)
(1212)(12-08)
(1712)(17-08)
R=015
No1
No2No3
x2
x0
y2
x1
y1
y0
Figure 4 The coordinate systems diagram of the EPR layout
Table 4 Six DOF serial robot parameters of links
119894 120579i(rad) 119889119894(m) 119886119894minus1(m) 120572119894minus1(rad)1 1205791(-1205872) 0325 0 02 0 01 0 -12058723 1205793(-1205872) -01 0300 04 0 0405 0 -12058725 0 0 0 12058726 0 0 0 -1205872
8 Journal of Robotics
Start
T=1
T=T+1
trialgtLimit
Y
Initialization
Employed bees search
Following bees search
Scout bees search
N
Y
N
Output
T=Tmax
Figure 5 The flow chart of ABC algorithm
is as shown in Figure 4 It is worth noting that in the positionlayout of the robot the base coordinate system of the fixed3-PRRR is set as the world coordinate system and only thepositions of two six DOF serial robots can move
The mathematical form of the three optimized objectivesis described as follows
min 119910 = 119891 (119877 120579) = [119891119904 (119877 120579) 119891119905 (119877 120579) 119891119888 (119877 120579)]s t 0 le 119877 le 015
0 le 120579 le 2120587(27)
where 119891119904(119877 120579) represents the area optimized function119891119905(119877 120579) represents the time optimized function 119891119888(119877 120579)represents the condition number optimized function Inaddition the circle of radius 119877 and the rotation angle 120579 arethe movable range of the serial robots
The artificial bee colony (ABC) algorithm [23 24] is usedto optimize the multiobjective layout parameters and itsdetailed procedure can be depicted in Figure 5 Since the EPRmotion form belongs to the type of 3T the two six-DOF serialrobots (No 2 and No 3) keep the posture in the layout asshown in Figure 4
Assume that the maximum velocity of the parallel robot3-PRRRrsquos prismatic joint is v=25ms the maximum velocityof the serial robotrsquos rotational joint is120596=2120587rads and they runat the maximum velocity Since the condition number of 3-PRRR is always 1 and the operation status of two serial robotsis the same the condition number of EPR is equivalent to thecondition number of a serial robot As long as the conditionnumber of the serial robot is minimal the condition numberof EPR will be minimal
02 03 04 05 06 07 08 0901 1Cycle time (s)
155
16
165
17
175
18
185
Occ
upie
d ar
ea (m
lowastm
)
Figure 6 Scatter plot of cycle time and occupied area
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
16 165 18175 185155 17Occupied area (mlowastm)
Figure 7 Scatter plot of occupied area and condition number
Figures 6ndash8 show the plane distribution diagramsbetween cycle time occupied area and condition numberFigure 9 is a spatial distribution diagram of the threeobjectives set as spatial coordinate axesThemethod ofMonteCarlo is used to plot the diagrams in this paper It can beseen that the scatter plots between the three objectives arenot evenly distributedThe cycle timemainly concentrates onthe range of 035 to 055 and the condition number mainlyconcentrates on the range of 85 to 11 In general the conditionnumber increases when the occupied area increases
Different layout will affect the values of the three objec-tives and it is particularly important to choose the layoutlocation that meets the objective requirements Next theABC algorithm will be used to search for the optimal solutionaccording to the importance of its optimized objectives Theresults obtained are shown in Table 5 and the corresponding119862 set of each branched robot in the EPR is shown inTable 6 When a=1 b=0 and c=0 the minimum occupiedarea 119878min=15500m
2 can be obtained Similarly when a=0b=1 and c=0 the minimum cycle time 119879min=00903s andwhen a=0 b=0 and c=1 the condition number 119862min=84253As seen in Table 5 the values of the objectives decrease asthe weight coefficient increases which is consistent with theresults of multiobjective optimization From Table 6 the Csets of each group of branched robots represent their endkinematic features the position and the posture of theirlayout which greatly facilitates the selection and layout of themultirobots
Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Robotics 7
x0
z0
y0
456 at the same point
x2
z2
y2
x1
z1
y1
x3
z3
y3
x4
z4y4
x5
z5
y5
x6
z6y6
xT
zTyT
0325
01
01017501065
03
065
Figure 3 Six DOF serial robot links coordinate system
0
(00)
(0202)
(1212)(12-08)
(1712)(17-08)
R=015
No1
No2No3
x2
x0
y2
x1
y1
y0
Figure 4 The coordinate systems diagram of the EPR layout
Table 4 Six DOF serial robot parameters of links
119894 120579i(rad) 119889119894(m) 119886119894minus1(m) 120572119894minus1(rad)1 1205791(-1205872) 0325 0 02 0 01 0 -12058723 1205793(-1205872) -01 0300 04 0 0405 0 -12058725 0 0 0 12058726 0 0 0 -1205872
8 Journal of Robotics
Start
T=1
T=T+1
trialgtLimit
Y
Initialization
Employed bees search
Following bees search
Scout bees search
N
Y
N
Output
T=Tmax
Figure 5 The flow chart of ABC algorithm
is as shown in Figure 4 It is worth noting that in the positionlayout of the robot the base coordinate system of the fixed3-PRRR is set as the world coordinate system and only thepositions of two six DOF serial robots can move
The mathematical form of the three optimized objectivesis described as follows
min 119910 = 119891 (119877 120579) = [119891119904 (119877 120579) 119891119905 (119877 120579) 119891119888 (119877 120579)]s t 0 le 119877 le 015
0 le 120579 le 2120587(27)
where 119891119904(119877 120579) represents the area optimized function119891119905(119877 120579) represents the time optimized function 119891119888(119877 120579)represents the condition number optimized function Inaddition the circle of radius 119877 and the rotation angle 120579 arethe movable range of the serial robots
The artificial bee colony (ABC) algorithm [23 24] is usedto optimize the multiobjective layout parameters and itsdetailed procedure can be depicted in Figure 5 Since the EPRmotion form belongs to the type of 3T the two six-DOF serialrobots (No 2 and No 3) keep the posture in the layout asshown in Figure 4
Assume that the maximum velocity of the parallel robot3-PRRRrsquos prismatic joint is v=25ms the maximum velocityof the serial robotrsquos rotational joint is120596=2120587rads and they runat the maximum velocity Since the condition number of 3-PRRR is always 1 and the operation status of two serial robotsis the same the condition number of EPR is equivalent to thecondition number of a serial robot As long as the conditionnumber of the serial robot is minimal the condition numberof EPR will be minimal
02 03 04 05 06 07 08 0901 1Cycle time (s)
155
16
165
17
175
18
185
Occ
upie
d ar
ea (m
lowastm
)
Figure 6 Scatter plot of cycle time and occupied area
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
16 165 18175 185155 17Occupied area (mlowastm)
Figure 7 Scatter plot of occupied area and condition number
Figures 6ndash8 show the plane distribution diagramsbetween cycle time occupied area and condition numberFigure 9 is a spatial distribution diagram of the threeobjectives set as spatial coordinate axesThemethod ofMonteCarlo is used to plot the diagrams in this paper It can beseen that the scatter plots between the three objectives arenot evenly distributedThe cycle timemainly concentrates onthe range of 035 to 055 and the condition number mainlyconcentrates on the range of 85 to 11 In general the conditionnumber increases when the occupied area increases
Different layout will affect the values of the three objec-tives and it is particularly important to choose the layoutlocation that meets the objective requirements Next theABC algorithm will be used to search for the optimal solutionaccording to the importance of its optimized objectives Theresults obtained are shown in Table 5 and the corresponding119862 set of each branched robot in the EPR is shown inTable 6 When a=1 b=0 and c=0 the minimum occupiedarea 119878min=15500m
2 can be obtained Similarly when a=0b=1 and c=0 the minimum cycle time 119879min=00903s andwhen a=0 b=0 and c=1 the condition number 119862min=84253As seen in Table 5 the values of the objectives decrease asthe weight coefficient increases which is consistent with theresults of multiobjective optimization From Table 6 the Csets of each group of branched robots represent their endkinematic features the position and the posture of theirlayout which greatly facilitates the selection and layout of themultirobots
Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

8 Journal of Robotics
Start
T=1
T=T+1
trialgtLimit
Y
Initialization
Employed bees search
Following bees search
Scout bees search
N
Y
N
Output
T=Tmax
Figure 5 The flow chart of ABC algorithm
is as shown in Figure 4 It is worth noting that in the positionlayout of the robot the base coordinate system of the fixed3-PRRR is set as the world coordinate system and only thepositions of two six DOF serial robots can move
The mathematical form of the three optimized objectivesis described as follows
min 119910 = 119891 (119877 120579) = [119891119904 (119877 120579) 119891119905 (119877 120579) 119891119888 (119877 120579)]s t 0 le 119877 le 015
0 le 120579 le 2120587(27)
where 119891119904(119877 120579) represents the area optimized function119891119905(119877 120579) represents the time optimized function 119891119888(119877 120579)represents the condition number optimized function Inaddition the circle of radius 119877 and the rotation angle 120579 arethe movable range of the serial robots
The artificial bee colony (ABC) algorithm [23 24] is usedto optimize the multiobjective layout parameters and itsdetailed procedure can be depicted in Figure 5 Since the EPRmotion form belongs to the type of 3T the two six-DOF serialrobots (No 2 and No 3) keep the posture in the layout asshown in Figure 4
Assume that the maximum velocity of the parallel robot3-PRRRrsquos prismatic joint is v=25ms the maximum velocityof the serial robotrsquos rotational joint is120596=2120587rads and they runat the maximum velocity Since the condition number of 3-PRRR is always 1 and the operation status of two serial robotsis the same the condition number of EPR is equivalent to thecondition number of a serial robot As long as the conditionnumber of the serial robot is minimal the condition numberof EPR will be minimal
02 03 04 05 06 07 08 0901 1Cycle time (s)
155
16
165
17
175
18
185
Occ
upie
d ar
ea (m
lowastm
)
Figure 6 Scatter plot of cycle time and occupied area
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
16 165 18175 185155 17Occupied area (mlowastm)
Figure 7 Scatter plot of occupied area and condition number
Figures 6ndash8 show the plane distribution diagramsbetween cycle time occupied area and condition numberFigure 9 is a spatial distribution diagram of the threeobjectives set as spatial coordinate axesThemethod ofMonteCarlo is used to plot the diagrams in this paper It can beseen that the scatter plots between the three objectives arenot evenly distributedThe cycle timemainly concentrates onthe range of 035 to 055 and the condition number mainlyconcentrates on the range of 85 to 11 In general the conditionnumber increases when the occupied area increases
Different layout will affect the values of the three objec-tives and it is particularly important to choose the layoutlocation that meets the objective requirements Next theABC algorithm will be used to search for the optimal solutionaccording to the importance of its optimized objectives Theresults obtained are shown in Table 5 and the corresponding119862 set of each branched robot in the EPR is shown inTable 6 When a=1 b=0 and c=0 the minimum occupiedarea 119878min=15500m
2 can be obtained Similarly when a=0b=1 and c=0 the minimum cycle time 119879min=00903s andwhen a=0 b=0 and c=1 the condition number 119862min=84253As seen in Table 5 the values of the objectives decrease asthe weight coefficient increases which is consistent with theresults of multiobjective optimization From Table 6 the Csets of each group of branched robots represent their endkinematic features the position and the posture of theirlayout which greatly facilitates the selection and layout of themultirobots
Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Robotics 9
Table 5 Optimization results with different weight coefficients
Number 119886 119887 119888 119877 120579 area time condition1 1 0 0 01500 0 15500 - -2 06 02 02 01283 58478 15837 01281 854693 033 034 033 01185 55168 16146 01154 845124 02 06 02 00773 02950 16260 01349 872425 0 1 0 01500 46911 - 00903 -6 02 02 06 01263 57336 15923 01239 847767 0 0 1 01500 55328 - - 84253
Table 6 The 119862 set of each robot under different weight coefficients
Number No1 (C) No2 (C) No3 (C)1 (0 0 0 0 0 0) (155 12 0 0 0 120587) (155 minus08 0 0 0 120587)2 (0 0 0 0 0 0) (15837 12541 0 0 0 120587) (15837 minus07459 0 0 0 120587)3 (0 0 0 0 0 0) (16146 12822 0 0 0 120587) (16146 minus07178 0 0 0 120587)4 (0 0 0 0 0 0) (16260 11775 0 0 0 120587) (16260 minus08225 0 0 0 120587)5 (0 0 0 0 0 0) (17032 135 0 0 0 120587) (17932 minus065 0 0 0 120587)6 (0 0 0 0 0 0) (15923 1266 0 0 0 120587) (15923 minus0734 0 0 0 120587)7 (0 0 0 0 0 0) (15903 13023 0 0 0 120587) (15903 minus06977 0 0 0 120587)
8
9
10
11
12
13
Con
ditio
n nu
mbe
r
02 03 04 05 06 07 08 0901 1Cycle time (s)
Figure 8 Scatter plot of cycle time and condition number
5 Conclusions
In this paper the concept of EPR is proposed based onthe parallel thought The problem for the construction andlayout optimization of a coordinated multirobots system istransformed into the selection and layout of the branchedchains of a parallel robot Firstly the concept of 119862 set andits operational rule are presented which can convenientlyrepresent the end kinematic features and the position andposture of the robot The selection scheme of EPR satisfyingthe requirements is constructed based on the intersectionrule of the 119862 set After that the ABC algorithm is used tooptimize the selected robots according to the principle ofminimum occupied area cycle time and condition numberBased on the importance of the three optimized objectives amultiobjective optimization for the multirobots system withweighted ratios is proposed The occupied area cycle timecondition number and the locations of the robots underdifferent weight coefficient can be obtained by the simulation
819
9
10
18
Con
ditio
n nu
mbe
r
11
1
12
Occupied area (mlowastm)
0817
13
06
Cycle time (s)
16 040215 0
Figure 9 Scatter plot of cycle time occupied area and conditionnumber in the space
experimentsThe results show that the proposed methods arefeasible
In future the work may involve the selection and layoutof multirobots in more complex situations For exampleconsider the situations of more tasks more operationalsequences and more robots
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This research was supported by the National Natural ScienceFoundation of China (Grants nos 51575256 51705243 and
10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

10 Journal of Robotics
51706098) and the Natural Science Foundation of JiangsuProvince (BK20170789)
References
[1] L Ding X Li Q Li and Y Chao ldquoNonlinear Frictionand Dynamical Identification for a Robot Manipulator withImproved Cuckoo Search Algorithmrdquo Journal of Robotics vol2018 Article ID 8219123 10 pages 2018
[2] M Hosseini R Meattini G Palli and C Melchiorri ldquoAWearable RoboticDevice Based onTwisted StringActuation forRehabilitation and Assistive Applicationsrdquo Journal of Roboticsvol 2017 Article ID 3036468 11 pages 2017
[3] P R Culmer A E Jackson SMakower et al ldquoA control strategyfor upper limb robotic rehabilitation with a dual robot systemrdquoIEEEASME Transactions on Mechatronics vol 15 no 4 pp575ndash585 2010
[4] S Manzoor S Lee and Y Choi ldquoA Coordinated NavigationStrategy for Multi-Robots to Capture a Target Moving withUnknown Speedrdquo Journal of Intelligent amp Robotic Systems vol87 no 3-4 pp 627ndash641 2017
[5] D-H Lee H Park J-H Park M-H Baeg and J-H BaeldquoDesign of an anthropomorphic dual-arm robot with biologi-cally inspired 8-DOF armsrdquo Intelligent Service Robotics vol 10no 2 pp 137ndash148 2017
[6] S Erhart and S Hirche ldquoInternal Force Analysis and LoadDistribution for CooperativeMulti-Robot Manipulationrdquo IEEETransactions on Robotics vol 31 no 5 pp 1238ndash1243 2015
[7] W Wan and K Harada ldquoDeveloping and Comparing Single-Arm and Dual-Arm Regrasprdquo IEEE Robotics amp AutomationLetters vol 1 no 1 pp 243ndash250 2016
[8] S Angra R Sehgal and Z Samsudeen Noori ldquoCellularmanufacturing-A time-based analysis to the layout problemrdquoInternational Journal of Production Economics vol 112 no 1 pp427ndash438 2008
[9] M Pellicciari G Berselli F Leali and A Vergnano ldquoA methodfor reducing the energy consumption of pick-and-place indus-trial robotsrdquoMechatronics vol 23 no 3 pp 326ndash334 2013
[10] I Suemitsu K Izui T Yamada S Nishiwaki A Noda and TNagatani ldquoSimultaneous optimization of layout and task sched-ule for robotic cellular manufacturing systemsrdquo Computers ampIndustrial Engineering vol 102 pp 396ndash407 2016
[11] W Xi B Chen Y Wang and F Ju ldquoType synthesis ofcoordinated multi-robot system based on parallel thoughtrdquoTransactions of the Canadian Society for Mechanical Engineer-ing vol 42 no 2 pp 164ndash176 2018
[12] M Gadaleta G Berselli and M Pellicciari ldquoEnergy-optimallayout design of robotic work cells Potential assessment onan industrial case studyrdquo Robotics and Computer-IntegratedManufacturing vol 47 pp 102ndash111 2017
[13] Z Y Lim S G Ponnambalam and K Izui ldquoMulti-objectivehybrid algorithms for layout optimization in multi-robot cellu-lar manufacturing systemsrdquo Knowledge-Based Systems vol 120pp 87ndash98 2017
[14] Y L Zhen S G Ponnambalam and K Izui ldquoNature inspiredalgorithms to optimize robot workcell layoutsrdquo Applied SoftComputing vol 49 no C pp 570ndash589 2016
[15] X Meng and F Gao ldquoBasic problems and criteria for synthesisof roboticsrdquo International Journal of Mechanisms and RoboticSystems vol 1 no 1 pp 35ndash48 2013
[16] F Gao J Yang and Q J Ge ldquoType Synthesis of Parallel Mecha-nisms Having the Second Class GF Sets and Two DimensionalRotationsrdquo Journal of Mechanisms and Robotics vol 3 no 1 pp623ndash632 2011
[17] T Yoshikawa ldquoManipulability of roboticmechanismsrdquo Interna-tional Journal of Robotics Research vol 4 no 2 pp 3ndash9 1985
[18] J K Salisbury and J J Craig ldquoArticulated hands force con-trol and kinematic issuesrdquo International Journal of RoboticsResearch vol 1 no 1 pp 4ndash17 1982
[19] M H Abedinnasab Y J Yoon and H Zohoor ldquoExploitingHigher Kinematic Performance - Using a 4-Legged RedundantPM Rather than Gough-Stewart Platformsrdquo Serial and ParallelRobot Manipulators - Kinematics Dynamics Control and Opti-mization 2012
[20] B Zi and S Qian Design Analysis and Control of Cable-suspended Parallel Robots and Its Applications Springer Nature2017
[21] L Wang W Rong L Qi and Z Qin ldquoOptimal design of a 6-DOF parallel robot for precise manipulationrdquo in Proceedingsof the 2009 IEEE International Conference on Mechatronics andAutomation ICMA 2009 pp 3933ndash3937 August 2009
[22] Y Fang and L-W Tsai ldquoStructure synthesis of a class of 4-DoFand 5-DoF parallelmanipulatorswith identical limb structuresrdquoInternational Journal of Robotics Research vol 21 no 9 pp 799ndash810 2002
[23] W Xi B Chen L Ding et al ldquoDynamic Parameter Identifica-tion for Robot Manipulators with Nonlinear Friction ModelrdquoTransactions of the Chinese Society for Agricultural Machineryvol 48 no 2 pp 393ndash399 2017
[24] LDingHWu andYYao ldquoChaoticArtificial BeeColonyAlgo-rithm for System Identification of a Small-Scale UnmannedHelicopterrdquo International Journal of Aerospace Engineering vol2015 Article ID 801874 11 pages 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom