CLS - L’Int egration Num erique en Calcul d’Orbites Cours de … · 2016. 2. 1. · L’Int...
47
L’Int´ egration Num´ erique en Calcul d’Orbites Cours de l’Ecole GRGS 2002 Pierre Exertier a , David Coulot a,b a Observatoire de la Cˆ ote d’Azur (CERGA/URA6527), av. Copernic, F-06130 Grasse b Institut G´ eographique National (LAREG, IGN/ENSG), 6-8 Av. B. Pascal, F-77455 Marne-la-Vall´ ee 5 f´ evrier 2003 R´ esum´ e Les m´ ethodes d’int´ egration num´ erique utilis´ ees en calcul d’orbites sont bas´ ees sur le principe de la discr´ etisation. On cherche des valeurs approch´ ees de la solution exacte E j (t) (le vecteur des 6 param` etres orbitaux, par exemple), sur un ensemble de points ´ equidistants. L’algorithme consiste alors ` a faire correspondre, ` a tous les points d’abscisse t n (o` u t n = t 0 + nh, h ´ etant le pas d’int´ egration), des nombres (E j ) n qui approchent les valeurs E j (t n ) de la solution exacte du syst` eme diff´ erentiel consid´ er´ e aux points t n . Les algorithmes g´ en´ eralement employ´ es aujourd’hui sont dits ”` a pas li´ es”, c’est-` a- dire qu’ils utilisent, ` a un instant t n quelconque, les valeurs aux instants t n+1-k d´ ej` a calcul´ ees. L’avantage de ces m´ ethodes est d’avoir acc` es ` a tout moment aux termes f ((E j ) n+1-k ,t n+1-k ), tableau qui permet ais´ ement l’interpolation ` a une date donn´ ee (date de mesure, par exemple). L’inconv´ enient, par rapport aux m´ ethodes dites ”` a pas s´ epar´ es”, se situe au d´ emarrage, puisqu’il faut bien constituer le premier tableau. Ceci se r´ ealise alors souvent par it´ erations successives. On peut noter par ailleurs que l’utilisation de diff´ erentes formules d’interpolation polynomiale, dans la mise en oeuvre d’un algorithme d’int´ egration, d´ ebouche sur diverses m´ ethodes d’int´ egration. Cowell utilise l’interpolation de Stirling, les m´ ethodes d’Adams utilisent les m´ ethodes de Lagrange, Newton, etc. 1
Transcript of CLS - L’Int egration Num erique en Calcul d’Orbites Cours de … · 2016. 2. 1. · L’Int...
-
L’Intégration Numérique en Calcul d’Orbites
Cours de l’Ecole GRGS 2002
Pierre Exertiera, David Coulota,b
aObservatoire de la Côte d’Azur (CERGA/URA6527), av. Copernic, F-06130 GrassebInstitut Géographique National (LAREG, IGN/ENSG), 6-8 Av. B. Pascal, F-77455 Marne-la-Vallée
5 février 2003
Résumé
Les méthodes d’intégration numérique utilisées en calcul d’orbites sont basées sur leprincipe de la discrétisation. On cherche des valeurs approchées de la solution exacteEj(t) (le vecteur des 6 paramètres orbitaux, par exemple), sur un ensemble de pointséquidistants. L’algorithme consiste alors à faire correspondre, à tous les points d’abscissetn (où tn = t0 + nh, h étant le pas d’intégration), des nombres (Ej)n qui approchent lesvaleurs Ej(tn) de la solution exacte du système différentiel considéré aux points tn.
Les algorithmes généralement employés aujourd’hui sont dits ”à pas liés”, c’est-à-dire qu’ils utilisent, à un instant tn quelconque, les valeurs aux instants tn+1−k déjàcalculées. L’avantage de ces méthodes est d’avoir accès à tout moment aux termesf((Ej)n+1−k, tn+1−k), tableau qui permet aisément l’interpolation à une date donnée(date de mesure, par exemple). L’inconvénient, par rapport aux méthodes dites ”à passéparés”, se situe au démarrage, puisqu’il faut bien constituer le premier tableau. Ceci seréalise alors souvent par itérations successives.
On peut noter par ailleurs que l’utilisation de différentes formules d’interpolationpolynomiale, dans la mise en oeuvre d’un algorithme d’intégration, débouche sur diversesméthodes d’intégration. Cowell utilise l’interpolation de Stirling, les méthodes d’Adamsutilisent les méthodes de Lagrange, Newton, etc.
1
-
Table des matières
1 Introduction 4
2 Vocabulaire Utile 6
3 Méthodes d’intégration numérique en calcul d’orbite 7
3.1 Les limites théoriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2 Présentation des méthodes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.3 Intégrateurs linéaires du premier degré . . . . . . . . . . . . . . . . . . . . . . 9
3.3.1 Aspects théoriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.3.2 Aspects pratiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3.3 Formulation générale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.3.4 Principes de stabilisation . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.4 Interpolation de Lagrange et différences divisées . . . . . . . . . . . . . . . . . 17
3.4.1 Polynôme interpolateur de Lagrange . . . . . . . . . . . . . . . . . . . 17
3.4.2 Méthode des différences divisées . . . . . . . . . . . . . . . . . . . . . 17
3.5 Formulation des intégrateurs dits ”à pas liés” . . . . . . . . . . . . . . . . . . 18
3.5.1 Méthodes d’Adams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.5.2 Méthode de Bulirsch & Stoer . . . . . . . . . . . . . . . . . . . . . . . 23
3.6 Intégrateurs linéaires du second degré . . . . . . . . . . . . . . . . . . . . . . 25
3.6.1 Méthode de (Adams-) Störmer . . . . . . . . . . . . . . . . . . . . . . 25
3.6.2 Méthode d’Adams-Moulton-Cowell (AMC) . . . . . . . . . . . . . . . 26
3.6.3 Méthode de Cowell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Méthode d’Encke 32
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2 Mouvement de référence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.3 Equations différentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2
-
4.3.1 Cas des éléments elliptiques usuels . . . . . . . . . . . . . . . . . . . . 33
4.3.2 Cas des coordonnées rectangulaires . . . . . . . . . . . . . . . . . . . . 34
5 La circularisation 37
5.1 Présentation générale de la méthode appliquée à l’algorithme de Cowell . . . 37
5.1.1 Position du problème . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.1.2 Méthode récurrente de calcul des coefficients modifiés . . . . . . . . . 39
5.2 Initialisation de la récurrence : méthodes d’ordre 2 et 4 . . . . . . . . . . . . . 44
6 Discussion 46
Références 47
3
-
1 Introduction
Les méthodes numériques d’intégration des systèmes différentiels ont connu des progrèstrès importants depuis le début des années 60. L’utilisation de calculateurs de plus en plusperformants a permis, depuis 30 ans environ, d’employer ces méthodes en Mécanique Célesteet en Géodésie Spatiale, voire de les généraliser ([9]).
Le mouvement du satellite artificiel est décrit par les lois de Newton, qui font appel àl’ensemble des forces (le modèle) subies par le satellite :
r̈ =µr
r3+ fG + fNG (1)
où r est le vecteur géocentrique Terre-satellite, r̈ est l’accélération et µ la constante de lagravitation.
Quelle que soit la forme sous laquelle on présente l’équation fondamentale de la dynamique(1), il s’agit d’équations différentielles que l’on veut intégrer numériquement. Suivant lescas, c’est-à-dire suivant la paramétrisation, en coordonnées rectangulaires ou en élémentsképlériens, on aura à faire avec des équations du second degré - au nombre de trois - ou dupremier degré - six -, respectivement.
Les différents types de mesures spatiales (techniques spatiales), par leur interprétationen restitution de trajectoires, ont donné des informations très précises sur la connaissancedes forces f agissant sur les satellites artificiels de la Terre. Aujourd’hui, de la qualité del’intégration numérique dépend la faculté que l’on a de savoir si les modèles de forces employés,voire aussi certaines données d’accélérométrie très fines, sont proches de la réalité ou non.
Les forces sont, de façon conventionnelle, séparées en deux catégories : les forces d’originegravitationnelle fG, qui ne dépendent que des positions et sont par nature conservatives, etles forces d’origine non-gravitationnelle fNG (par unité de masse) qui peuvent dépendre desvitesses et sont, par nature également, non-conservatives voir dissipatives. Schématiquement,nous avons :
1. gravitationnel :
– le champ de gravité statique (décrit en harmoniques sphériques),– le champ de gravité variable (marées, ...),– l’attraction gravitationnelle du Soleil, de la Lune et des planètes (effets directs et
indirects),– les effets de la relativité
2. non-gravitationnel :
– le freinage atmosphérique dû aux effets de la densité,– la pression de radiation solaire directe (incluant les effets d’ombre),– la pression de radiation rediffusée par la Terre (effets de réémission et d’émissivité),– les poussées thermiques dues au satellite,– autres (effet de charge électrique, ...).
Ces équations du mouvement sont typiquement exprimées dans le système J2000, dont laréalisation effective dans les calculs d’orbite peut être soit un repère inertiel, souvent défini
4
-
par l’équateur et l’équinoxe moyen en 2000, soit un repère quasi-inertiel, généralement lerepère céleste vrai de la date. Dans les deux cas, ceci implique de définir et d’utiliser destransformations de coordonnées appropriées pour pouvoir exprimer toutes les forces dansle même système. Par exemple, le champ de gravité statique est communément décrit dansun système terrestre moyen tournant, ce qui implique une transformation de la force versle système d’intégration en utilisant la précession, la nutation, le mouvement du pôle et larotation de la Terre (UT1). La variable indépendante, dans la terminologie actuelle, est leTemps Terrestre (TT) qui est équivalent au précédent Temps Dynamique Terrestre (TDT).
Un résumé récent des modèles de forces, d’orientation de la Terre et d’échelle de temps estdonné dans les Conventions de l’International Earth Rotation Service (IERS) [12], notammentpour les satellites géodésiques.
Les méthodes d’intégration, dites dynamiques, apportent la meilleure prédiction possibledu mouvement d’un objet spatial à partir d’une série de mesures de poursuite et d’un modèled’évolution/restitution d’orbite. Pour cela, des solutions approchées d’équations approchéessont recherchées, sur la base de systèmes dynamiques dont l’évolution temporelle est décritepar un nombre fini d’équations déterministes : ici le système des équations du mouvementd’un satellite artificiel de la Terre (voir [16], par exemple).
Dans ce cours, nous verrons tout d’abord la formulation générale des intégrateurs linéaires,les grandes caractéristiques des algorithmes, le vocabulaire (notes de F. Faubert, GRGS,Grasse, 1986). Ensuite, nous décrirons plus finement le principe puis le calcul des coefficientsdes algorithmes, dans plusieurs cas. Enfin, nous décrivons plus spécifiquement deux types deméthodes, la circularisation et la méthode d’Encke, qui permettent de très bien stabilisé lescalculs d’intégration numérique lorsque l’on cherche une très faible erreur relative (projetsGRACE et GOCE, notamment).
5
-
2 Vocabulaire Utile
Le vocabulaire utilisé couramment en géodésie spatiale est très spécifique, pas toujoursclair, redondant, parfois un peu obscur pour le lecteur non averti, comme dans de nombreusesspécialités. Le lecteur trouvera les expressions suivantes :
géodynamique Etude des sources de variations du champ de gravité de la Terre (lesdéplacements de masses)
dynamique Représentation des mouvements célestes ou spatiaux (dynamique orbitaleou spatiale) par intégration des équations de la dynamique
Les systèmes dynamiques sont des systèmes d’équations différentielles
non-linéaires
solution d’orbite Ephéméride d’un satellite artificiel généralement obtenue par intégrationnumérique d’un modèle de forces
long terme Les arcs longs représentent plusieurs milliers de révolutions orbitales (1 à20 ans)
court terme Les arcs courts représentent quelques centaines de révolutions (1 à 10jours)
méthode classique Méthode d’intégration numérique des équations du mouvement et deséquations de sensibilité des variables à des paramètres dynamiques choisis
sol. géométrique Calcul des positions/vitesses d’un satellite artificiel de la Terre, sansmodèle dynamique, grâce à la redondance des données de poursuite
sol. analytique d’ordre i Expressions formelles et littérales des variables du mouvement en fonctiondes coefficients des forces perturbatives
sol. semi-analytique Calcul d’une éphéméride par une transformation analytique des équationsdu mouvement (filtrage ou moyenne) et intégration numérique des nou-
velles équations
sensibilité Dérivée partielle des variables décrivant le mouvement par rapport à desparamètres dynamiques choisis
précision des solutions Ecart-type des différences entre quantités observées et mesurées (enréférence aux estimateurs liés au moindres carrés)
Différences entre solutions de différente nature
erreur d’orbite Partie dépendant du temps : normalement décomposable en séries deFourier de la période orbitale et de ses sous-multiples. Le signal peut
néanmoins présenter des sauts de phase importants au fur et à mesure du
temps
Partie constante : erreur d’orbite toujours réitérée en un point
géographique fixe sur la Terre (erreur géographiquement corrélée)
propagation d’erreur Calcul de l’influence de l’erreur d’orbite (part constante essentiellement)dans le calcul d’un sous-produit : coordonnées de stations, profil al-
timétrique, ...
système spatial Ensemble formé par un satellite (ou une constellation), son type d’orbite(altitude, ...), la technique de géodésie spatiale utilisée pour l’acquisition
de mesures de poursuite, et le réseau des stations terrestres correspon-
dantes
étalonnage (ou calibration) Opération de contrôle d’un instrument visant à établir son systématismede mesure par rapport à un autre instrument, plus exact et plus précis
6
-
3 Méthodes d’intégration numérique en calcul d’orbite
3.1 Les limites théoriques
La recherche de la meilleure représentation possible, dans notre approche de la détermina-tion du mouvement orbital, est très exigeante. Ceci est dû à la proximité des trajectoirespar rapport à la Terre ([8]), rendant plus complexe le volume des interactions dynamiquessatellite-milieu spatial dont il faut rendre compte pour intégrer les équations du mouvement(1). L’exigence tient aussi et surtout à la très grande précision recherchée sur les positions etles vitesses fournies par les solutions d’orbite (les éphémérides) à court terme comme à longterme.
Les limites de prédiction, en précision et stabilité à long terme, ne sont pas inhérentes auxpropriétés du système dynamique, le mouvement du satellite étant stable et régulier au sensde la Mécanique Céleste sur les durées considérées. Elles viennent en grande partie de noscapacités actuelles en ce qui concerne [15] :
– les conditions initiales du mouvement (position et vitesse du satellite à un instant donné).Elles ne sont connues qu’approximativement, étant issues soit des observations, soit decalculs approchés ;
– le modèle d’évolution (l’expression des forces). Son estimation est délicate et celle del’exactitude de toutes les constantes numériques qui le décrivent reste difficile.Ajoutons que l’aspect chaotique de la rotation du satellite sur lui-même peut introduirepar couplages “spin-orbite” des effets, certes faibles, mais dont il est très difficile derendre compte dans la modélisation ;
– les équations différentielles du mouvement. Du fait que celles-ci ne sont pas intégrables,le développement de techniques d’intégration spécifiques comme l’intégration numériquese révèle inévitable, générant des erreurs sur le résultat final ;
– les techniques de mesure de poursuite. Il faut pouvoir transcrire, interpréter et exploi-ter correctement des observations de précisions parfois hétérogènes. L’ajustement desconditions initiales du mouvement ainsi que d’éventuels termes du modèle en dépend.
Compte tenu de ces considérations, il apparâıt qu’un long effort est encore nécessaire pouroptimiser la précision des solutions et assurer leur stabilité à très long terme ([9]).
3.2 Présentation des méthodes
Avant tout, il faut noter ici les quatre critères fondamentaux nécessaires à l’établissementde toute théorie d’intégration numérique (voir par exemple [11]) :
– un ensemble de valeurs permettant de calculer l’approximation suivante,– un formalisme estimant les erreurs de troncature par pas,– des critères permettant d’accepter un résultat en fonction de la précision recherchée (cas
des méthodes avec prédiction-correction notamment),– parfois aussi, un critère permettant de détermminer à quel instant on doit changer le pas
(sur quelle partie de la trajectoire), et lequel choisir afin d’optimiser en même temps laprécision et le temps de calcul (travaux de Kulikov, notamment).
7
-
On distingue les méthodes d’intégration numérique ”à pas liés”, ”à pas séparés”, à pas fixeou variable, et aussi des méthodes qui ont un système de prédiction-correction.
De plus, ces méthodes sont souvent fondées sur l’approximation du second membre deséquations par un polynôme ou, parfois, par une fraction rationnelle.
Nous allons étudier ici les trois méthodes les plus fréquemment employées dans les pro-grammes de restitution d’orbite de satellite artificiel. Chacune d’entre elles représente, par saspécificité une classe particulière de méthodes :
– les méthodes de type Adams-Moulton et Adams-Bashforth, utilisées dans le programmeCODIOR (restitution d’orbite moyenne de satellite) du CERGA, caractérisées par :– un pas lié– une interpolation polynomiale– des équations différentielles du premier degré
– les méthodes de type Cowell, utilisées dans les programmes GINS et ZOOM du CNES,caractérisées par :– un pas lié– une interpolation par développement de Taylor des fonctions du second membre– des équations différentielles du second degré
– la méthode de Bulirsh & Stoer, utilisée dans le programme d’extrapolation d’orbiteLAGRAN, caractérisée par :– un pas variable (éventuellement), le concept de pas ayant toutefois un sens spécifique
à cette méthode– un système de prédiction-correction– une interpolation par fraction rationnelle– des équations différentielles du premier degré
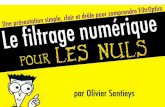
Fig. 1 – Evaluation de l’intégration numérique sur STARLETTEDifférence sur 10 jours entre une orbite intégrée en éléments orbitaux et une orbite intégrée en
coordonnées rectangulaires. Le potentiel gravitationnel perturbateur est développé jusqu’aux degré
et ordre 20. Le pas d’intégration est de 30 secondes.
8
-
3.3 Intégrateurs linéaires du premier degré
3.3.1 Aspects théoriques
Le but est de calculer numériquement la solution d’une équation différentielle du type decelle du problème de Cauchy :
dy
dt= f(t, y(t)), t ≥ 0
y(t0) = y0
(2)
où f est une fonction suffisamment régulière des deux variables t et y. Ceci est équivalent àla recherche d’une fonction ϕ ∈ C1[0, T ]1 telle que :
∀t ∈ [0, T ], ϕ(t) = y0 +∫ t
0f(s, ϕ(s))ds
où ∀h > 0, h étant un pas d’évolution de la variable t :
ϕ(h) = y0 +
∫ h
0f(s, ϕ(s))ds
= y0 + hf(0, y0) + h ε(h)
D’où l’on peut déduire une récurrence explicite définissant yn+1, selon la méthode d’Euler :
yn+1 = yn + h f(tn, yn) tn = nh et n ≥ 0
y0 = y(t0)(3)
Si nous pouvons estimer une erreur ”locale” en Θ(h2), pour passer de yn à yn+1, il existe,pour définir l’erreur ”globale”, un processus de cumul des erreurs locales. Car à l’instant tn,au lieu de partir de yn, on part en fait d’une valeur calculée ỹn.
Convergence :
Une méthode converge si :max0≤n≤N |ỹn − ϕ(tn)| → 0
quand y(t0) → ϕ(t0) et h → 0.
Ceci revient à dire que, pour t = nh, limn→∞ ỹn(t) = ϕ(t). Dans ce cas, on a alors h → 0.
La quantité max0≤n≤N |ỹn − ϕ(tn)| est l’erreur globale de la méthode.
1ϕ est la solution exacte de (2).
9
-
Pour obtenir une approximation de ϕ(t) par la méthode retenue, il faudrait ainsi faired’autant plus de calculs que h est petit ; le cumul des erreurs locales se posera alors defaçon accrue. Il y a convergence si, à la limite, ce cumul s’efface devant l’augmentationde précision globale de la méthode.
Consistance :
On définit l’erreur de consistance comme étant la quantité :
en = ϕ(tn+1) − yn+1la valeur yn+1 étant issue de (3), avec yn = ϕ(tn).
Une méthode est dite consistante lorsque∑
0≤n≤N |en| tend vers 0, lorsque h tend vers 0.
De plus, une méthode est consistante d’ordre α s’il existe une constante C ≥ 0 telleque :
∀n ∈ IN, 0 ≤ n < N, |en| ≤ Chα+1
Cette notion affirme la ”précision locale” d’une méthode (d’un schéma) : Θ(hα+1).
On peut déduire de ceci la règle suivante : une consistance d’ordre Θ(hp+1) implique uneconvergence à Θ(hp). Le schéma d’Euler converge : s’il est consistant d’ordre Θ(h2), la conver-gence a lieu en Θ(h). Cependant, le cumul des erreurs conserve un caractère linéraire : leserreurs locales s’ajoutent.
Stabilité :
On dit que la méthode est stable s’il existe une constante S ≥ 0 telle que, pour toutes suites(yn) et (zn) définies respectivement par :
yn+1 = yn + hf(tn, yn)
zn+1 = zn + hf(tn, zn) + εn
on ait (où εn désigne une erreur d’arrondi) :
max0≤n≤N |yn − zn| ≤ S(|y0 − z0| +∑
0≤n≤N
|εn|
Ainsi, de petites erreurs dans le calcul génèrent finalement une erreur contrôlable.
On conçoit que la convergence du schéma exige la stabilité, mais celle-ci n’est pasforcément satisfaite sur tous les schémas linéaires (L).
La convergence exige la stabilité de (L), qui a lieu sous certaines conditions. En règlegénérale : ”consistance + stabilité ⇒ convergence”.
10
-
Exemple de schémas en Θ(h3)
Euler amélioré (”à pas séparés”)
y?n+1 = ỹn + hf(ỹn, nh)
ỹn+1 = ỹn +h
2[f(ỹn, nh) + f(y
?n+1, (n + 1)h)]
(4)
Adams-Bashforth (AB) (”à pas liés”)
ỹn+1 = ỹn +h
2[3f(ỹn, nh) − f(ỹn−1, (n − 1)h)] (5)
Le premier requiert, à chaque calcul, deux appels au second membre. Le second, AB, n’enrequiert qu’un, puisque fn−1 est déjà en mémoire. AB utilise, pour ỹn+1, une extrapolationlinéaire à partir de ẏn−1 et ẏn ; la consistance est bien d’ordre 3, mais il faut faire attentionaussi à la stabilité si l’intervalle [0, T ] est trop grand.
3.3.2 Aspects pratiques
On peut exprimer les choses de façon totalement numérique. Ainsi, le problème de Cauchyse traduit par :
y(t0 + T ) = y(t0) +n∑
i=0
∫ t0+(i+1)h
t0+ihg(t, y(t))dt (6)
avec : g(t, y(t)) ' f(t, y(t)).
Les méthodes d’intégration numérique se distinguent par le type de construction de lafonction d’approximation g. Le pas h d’intégration peut être d’autant plus grand que gapproche mieux la fonction f , mais alors le calcul de g est d’autant plus compliqué.
Rappelons que les méthodes sont à un pas (dites ”à pas séparés”) ou bien multi-pas (dites”à pas liés”). Voici un exemple d’une méthode ”à pas séparés” de degré un et d’ordre N , oùN correspond au nombre de fonctions fp utilisées dans le schéma (Runge-Kutta, RK-N) :
yn+1 − yn = hN∑
p=1
bp fp
fp = f [yn +N∑
j=1
ap,j fj, tn + cph] (7)
Avec les versions suivantes : RK-4 (Kutta), RK-6 (Butcher, 1964), RK-8 (Schanks, 1966).
11
-
⇒ A pas séparés (par exemple : RK) : les fp sont des évaluations de la fonction (t 7→f(t, y(t))), faites aux pas précédents :
nt
f
t
f n
Il existe une grande richesse de possibilités de construction de réseau, pour une meilleureévaluation du second membre.
⇒ A pas liés (par exemple : Cowell) : à chaque pas, on cherche fp en un réseau (tp, yp) : (i)voisin du pas courant (tn, yn), et (ii) indépendant des autres pas.
t
f
f
tttt
ffn−4
ff
f
n+1ntt
n−1n−2n−3n−4
n+1n
n−1n−2
n−3
Ici, le réseau de construction est imposé par les précédents pas d’intégration.
12
-
Différences entre les algorithmes ”à pas séparés” et ”à pas liés”
Type d’algorithme ”à pas séparés” ”à pas liés”
Volume de calcul à ordre égal supérieur donc : tempsde calcul et erreur d’ar-rondi en hausse
réduit au minimum
Nbe d’éval. du second membre parpas
N 1
Mémoires des pas précédents sans N pas disponiblesProcédure de démarrage aucune élaboréeChangement de pas d’intégration à chaque instant quasi-impossibleConstruction du réseau d’évaluation grande richesse imposée par les pas
précédentsalgorithme adaptable on peut changer la
classe des polynômesErreur de troncature plus faible
3.3.3 Formulation générale
Afin d’obtenir une consistance d’ordre élevé, on a intérêt à privilégier une évaluation dela fonction f (second membre), ainsi que de sa dérivée, par moyenne pondérée ; mais il fautalors définir les coefficients. D’où l’approximation inhérente à la classe des méthodes linéairesmulti-pas (linear multistep (LM) methods) :
yn+1 +P∑
p=p0
ap yn+1−p = hN∑
p=n0
bp fp (8)
Le premier membre est l’évaluation de la dérivée ẏ par moyenne, pondérée (ap) dedifférences de y au voisinage de yn+1, et le second l’évaluation de f(t, y) par moyenne pondérée(bp) d’évaluations fp de la fonction autour de yn+1. L’ordre de l’intégrateur est bien N , c’est-à-dire le nombre de fonctions fp entrant dans la moyenne.
Un algorithme est donc déterminé par :– le choix des lieux fp d’évaluation de la fonction f(t, y)– le choix des coefficients (ap, bp)La stratégie de formation des fp étant choisie, on peut, en choisissant les coefficients (bp)
convenablement, faire en sorte que l’équation de progression soit vérifiée pour quelques fonc-tions particulières fq(t, y). On privilégie alors un jeu de fonctions que l’intégrateur intégreraexactement, car l’équation de progression (par exemple : yn+1 − yn = h
∑
p bp fp) est exacte-ment vérifiée pour ces dernières.
→ Le jeu des fonctions fq(t, y) indépendantes, intégrées exactement, contient au plus Nfonctions (ordre) ; on n’a donc de liberté que pour le choix de N constantes (bp).
Exemple : dans l’algorithme de Cowell original, le jeu des N fonctions choisies corres-pond à N polynômes de degrés allant de 1 à N . La méthode de Cowell intègre ainsi
13
-
exactement toute fonction polynomiale de degré ≤ à l’ordre d’intégration.→ Il est possible de privilégier des fonctions autres que des polynômes, comme par exemple
des fonctions circulaires, sinus ou cosinus, à la période du mouvement considéré.
Erreur de troncature
→ L’intégrateur passe exactement à travers une classe de fonctions privilégiées fq. Il passedonc du pas n au pas n+1 en ”supposant” que la solution y(t) est combinaison linéairedes fonctions qu’il intègre exactement.
En pratique, un tel algorithme de décomposition ne sera acceptable que lorsque ledéveloppement de Taylor de la fonction pourra être tronqué à l’ordre N avec une erreurnégligeable, souvent évaluée à l’aide du terme de rang (n + 1), lui-même négligé.
Si la solution y(t) ne se décompose pas exactement sur la base des N fonctions fqprivilégiées, il y a troncature dans la décomposition.
L’évaluation de l’erreur de troncature se fait en pratique avec deux intégrations à h eth/2 ; la différence entre les résultats donne alors une idée de sa valeur.
→ Facteurs dégradant l’erreur de troncature :– ordre d’intégration faible (d’où une mauvaise représentation de la solution)– pas d’intégration h trop grand– durée de l’intégration importante (l’erreur de troncature est bien évidemment fonction
croissante du pas d’intégration).
Erreur d’arrondi
Plusieurs auteurs ont étudié, souvent de façon empirique, l’erreur d’arrondi et sa propaga-tion dans les mouvements orbitaux intégrés numériquement sur le très long terme.
→ L’erreur d’arrondi se cumule avec le nombre de pas au carré : N 2. Elle est proportionnelleà ε = 2−b, où b est le nombre de bits de la mantisse réservés pour la représentation desnombres réels en machine ;
→ si la valeur moyenne de l’erreur d’arrondi était zéro, l’effet en longitude serait proportion-nelle à N 3/2 ;
→ l’utilisation de la méthode d’Encke (voir plus loin) permet de réduire cet effet d’un facteur0.006 (Nobili et al.).
3.3.4 Principes de stabilisation
Divers auteurs ont recherché des algorithmes qui intègrent exactement des fonctions nonpolynomiales, notamment en calcul d’orbites (fonctions trigonométriques, harmoniques, etc).Ceci peut se faire de deux façons :
1. en modifiant les coefficients (bp) d’un algorithme tel que celui décrit par la formulationgénérale précédente (8),
2. en recherchant un changement de variable indépendante (ou descriptive), qui ”régu-larise” un certain algorithme pour une famille donnée d’orbites.
14
-
Ces procédés s’appliquent dans le cadre de la stabilisation des méthodes aux différencesfinies (de nombreux calculs, présentés ici, sont issus de notes de G. Balmino, CNES/GRGS,Toulouse).
Régularisation
Le temps n’est pas une variable d’intégration bien adaptée pour les orbites très excentriques(e > 0.1 en géodésie spatiale, par exemple). La répartition des points sur l’orbite est insuffi-sante au périgée où les perturbations sont multiples et de fortes amplitudes.
→ L’intégration d’une équation différentielle de plus donne le temps t (ou anomalie moyenne)en fonction de la variable d’intégration. Dans le cas général (~r a pour coordonn/’eesx, y, z), on a (idem pour y et z) :
dt
ds= f(r, ..)
dx
ds= f(r, ..)
dx
dt
d2x
ds2= g(r, ..)[r̄.V̄ ]
dx
dt+ [f(r, ..)]2
d2x
dt2
La régularisation permet de ramener le calcul d’une orbite quelconque (en particulieravec une excentricité e importante), au calcul d’un mouvement circulaire plan, dans lamesure où la densité des points sur l’orbite est la même au périgée et à l’apogée.
Ceci est un moyen détourné, certes très efficace, qui ne remet pas en question la tech-nique d’intégration donc l’erreur de troncature.– La variable E (anomalie excentrique) est un bon compromis :
M = E − e sin EdM
dE= (1 − e cos E) → dM
dE=
r
a
Ici : dt/ds = r/a. On compte le temps à partir du début de l’intégration, d’autrepart, on préfère intégrer numériquement des fonctions bornées, on pose donc : t =θ0 + s + σ(s), d’où : dσ/ds = r/a − 1. La partie périodique du temps, prise nulle aupérigée, est σ. Ce qui implique :
n θ0 = Eorigine − Morigine
et, grâce à l’équation de Kepler :
θ0 =1
ne sinEorigine =
a
µ~r.~V (origine)
On passe de la variable s à la variable temps, avant chaque appel à la fonction secondmembre, et on revient de la variable temps à la variable s ensuite. Les formules de
15
-
changement de variables sont les suivantes (idem pour y et z) :
dt
ds=
r
a
dx
ds=
r
a
dx
dt
d2x
ds2=
1
a2[r̄.V̄ ]
dx
dt+
[
r
a
]2 d2x
dt2
– La variable v (anomalie vraie) est bien adaptée mais les calculs sont plus complexes :
r2 v̇ = na2√
1 − e2 = C0→ dM
dv=
r
a
2 1√1 − e2
Le calcul de θ0 ne peut se simplifier comme dans le cas de l’anomalie excentrique,mais il n’est fait qu’une fois pour toute l’intégration. Les formules de changement devariables sont les suivantes (idem pour y et z) :
dt
ds=
r2
C0
dx
ds=
r2
C0
dx
dt
d2x
ds2= 2
r2
C20[r̄.V̄ ]
dx
dt+
[
r2
C0
]2d2x
dt2
Circularisation
La circularisation permet d’intégrer exactement les mouvements plans circulaires uniformes,dans la mesure où les coefficients (bp) de l’intégrateur correspondent, cette fois, au choix d’unefonction harmonique exp(j(i − 1)ωt), de fréquence (2π/T ) donnée. Elle peut être utiliséeindépendamment de la régularisation, mais il n’est cependant pas souhaitable de l’employersans elle pour le calcul d’orbites excentriques.
→ Cette modification de l’algorithme peut se traduire par l’adjonction de termes correctifsdans les équations de l’intégrateur. Les formules corrigées tiennent compte, dans lescoefficients, du rapport (pas/période).
Mais il faut alors connâıtre la période avec beaucoup de précision. Une façon efficace deréduire l’erreur de troncature (sur l’intégration de l’équation du temps, par exemple)est de tenir compte du moyen mouvement képlérien et des effets séculaires dus à J2,J4, J6.
Ainsi, le choix de l’option ”circularisation” permet-il, dans une certaine mesure, deréduire ce type d’erreur de troncature. La fonction second membre devrait être mieuxreprésentée que dans le cas des seuls polynômes.
16
-
La section 5 est consacrée à ce formalisme ; elle veut donner une base afin de montrer com-ment calculer, dans le cadre de la méthode de Cowell, les coefficients modifiés de l’algorithme”classique” par l’adjonction de fonctions harmoniques à plusieurs fréquences.
3.4 Interpolation de Lagrange et différences divisées
Sont rappelées brièvement dans cette partie la méthode d’interpolation de Lagrange et lesprincipales propriétés des différences divisées.
On considère une fonction f : [a, b] → IR continue et une subdivision de n+ 1 points, deuxà deux distincts, t0, t1, ..., tn du segment [a, b]. On se place dans Pn, IR espace vectoriel dedimension n + 1 des fonctions polynômes de degré inférieur ou égal à n.
3.4.1 Polynôme interpolateur de Lagrange
Le polynôme interpolateur de f sur [a, b] selon la subdivision t0, t1, ..., tn est l’unique po-lynôme pn de Pn tel que :
∀i ∈ {0, 1, ..., n}, pn(ti) = f(ti) (9)Définissant les fonctions élémentaires li, i ∈ {0, 1, ..., n}, par :
∀x ∈ [a, b], li(t) =n∏
j=0,j 6=i
t − tjti − tj
(10)
on a :
∀t ∈ [a, b], pn(t) =n∑
i=0
f(ti)li(t) (11)
Ce polynôme peut également être calculé à partir des différences divisées de la fonction f .
3.4.2 Méthode des différences divisées
La méthode des différences divisées est une méthode simple de calcul du polynôme inter-polateur de Lagrange.
Définition et propriétés. La différence divisée d’ordre k de la fonction f , notéef [t0, t1, ..., tk], est le coefficient de plus haut degré (ou encore coefficient directeur) du po-lynôme interpolateur pk de f . Reprenant le précédent polynôme interpolateur pn, on peutmontrer :
17
-
∀t ∈ [a, b], pn(t) = f(t0) +n∑
k=1
f [t0, t1, ..., tk](t − t0).(t − t1)...(t − tk−1) (12)
Les différences divisées de f vérifient la formule de récurrence [7] :
∀k ∈ IN∗, f [t0, t1, ..., tk] =f [t1, ..., tk] − f [t0, ..., tk−1]
tk − t0(13)
A l’aide de cette formule de récurrence et de l’algorithme de Hörner, on peut facilementcalculer le polynôme interpolateur de Lagrange pn [7].
Reprenant les deux expressions (11) et (12), on constate aisément, par identification duterme de plus haut degré des polynômes pk, que :
∀k ∈ {0, 1, ..., n}, f [t0, t1, ..., tk] =k∑
i=0
f(ti).Πi (14)
avec :
Πi =k∏
j=0,j 6=i
1
ti − tj
Enfin, terminons avec deux propriétés utiles.
→ La (k − 1)ème différence divisée d’un polynôme de degré (k − 2) est nulle. En effet, lepolynôme de degré (k − 2) est égal à son polynôme interpolateur de Lagrange. La (k −1)ème différence divisée de ce polynôme serait le coefficient directeur de son polynômeinterpolateur si celui-ci était de degré (k − 1) ; elle est donc nulle. On peut ainsi écrire(les coefficients cj étant arbitraires) :
k∑
i=1
c1ti + c2t2i + ... + ck−1t
k−1i
ti.Πi = 0 (15)
→ La (k − 1)ème différence divisée d’un polynôme de degré (k − 1) est égale au coefficientdu terme de plus haut degré de ce polynôme.En effet, le polynôme de degré (k − 1)est égal à son polynôme interpolateur de Lagrange. La (k − 1)ème différence divisée dece polynôme est le coefficient directeur de son polynôme interpolateur donc son proprecoefficient directeur. On peut ainsi écrire (le coefficient ck étant arbitraire) :
k∑
i=1
ck tki
ti.Πi = ck (16)
3.5 Formulation des intégrateurs dits ”à pas liés”
Ces méthodes sont basées sur l’idée que plus d’information peut être utilisée à un momentdonné dans le processus d’intégration, en prenant en compte non seulement yn mais aussiyn−1, yn−2, etc.
18
-
Ces méthodes demandent en général moins de calculs que les méthodes à un pas, pourla même précision. En revanche, elles sont complexes à mettre en oeuvre (processus dedémarrage) et, dans certains cas, dangereuses du point de vue des éventuelles instabilitésnumériques (voir par exemple [1]).
La plupart des méthodes ”à pas liés” conventionnelles sont basées sur l’interpolation po-lynomiale. On privilégie ainsi, dans l’équation (6), l’intégration de classes de fonctions puis-sances de la seule variable t :
gj(t) = tj−1 (j = 1, N + 1) (17)
qui sont des polynômes de degré ≤ N + 1.
3.5.1 Méthodes d’Adams
Ces méthodes présentent les qualités de simplicité et d’efficacité qui en font celles les plussouvent choisies dans les programmes d’intégration numérique. Elles se rapprochent beaucoupde la méthode ”élémentaire” de Runge-Kutta et semblent être les plus indiquées pour unepremière approche de l’intégration numérique. On progresse pas par pas avec une formegénérale du type :
yn+1 − yn = hN∑
p=1
bp f(yn+1−p, tn+1−p) (18)
Les méthodes d’Adams nécessitent la connaissance d’un nombre fini de valeurs particulièresde la fonction aux points tn choisis. Elles résolvent des équations linéaires du premier degré.
Ces méthodes approchent la fonction f par son polynôme de Lagrange construit à partirdes formules de Newton sur les différences successives d’une fonction aux points tn. L’écriture(voir section précédente) montre bien la nécessité de connâıtre plusieurs valeurs de la fonctionaux instants (t0, t1, . . . , tn). Les méthodes d’Adams s’inscrivent donc bien dans le cadre desméthodes dites ”à pas liés”.
Si l’on choisit :
f(t, y(t)) =N+1∑
j=1
cj gj(t) + k(t)
avec : gj(t) = tj−1
où k(t) est le résidu de la décomposition de f sur la base des fonctions g (c’est-à-dire l’erreurde troncature), on obtient :
fn+1−p =N+1∑
j=1
cj gj(tn+1−p) p ∈ {1, N}
19
-
d’où :
fn...
fn−N
=
g1,1 . . .... gp,j
.... . . gN,N+1
×
c1...
cN+1
avec : gp,j = t
j−1n+1−p
puis :
cj =N+1∑
p=1
G−1p,j fn+1−p (j = 1, . . . , N + 1)
La fonction f prend les valeurs fn+1−p aux points correspondants, pour p ∈ {1, N + 1} ; lepolynôme passant par les points (fn+1−p, tn+1−p) de degré N est unique. Les valeurs tn+1−pdoivent toutes être distinctes, sinon le déterminant de la matrice Gp,j (qui doit être régulière),du type Vandermonde, est nul.
Les coefficients (cj) sont les coefficients du polynôme d’interpolation de Lagrange ; onpeut alors utiliser la formule de Newton, faisant intervenir les différences descendantes de lafonction f :
f(t, y(t)) ' P (t) =N∑
j=0
(−1)jC−sj ∆j− fn
t ∈ [t0, tn] ; s = (t − tn)/havec :
∆j− fn =j∑
k=0
(−1)k Cjk fn−k
Exemple pour N = 2
yn+1 − yn =∫ tn+1
tn(c1 + c2t)dt = c1h +
c22
[t2]tn+1tn
avec :fn+1−p = c1 + c2tn+1−p + c3t
2n+1−p + . . .
ce qui fournit le système suivant :
fnfn−1fn−2...
=
1 tn t2n . . .
1 tn−1 t2n−1
1 tn−2 t2n−2
......
×
c1c2c3...
d’où :
c1 =fn−1tn − fntn−1
tn − tn−1et : c2 =
fn − fn−1tn − tn−1
et :
yn+1 − yn = h[
3
2fn −
1
2fn−1
]
(19)
On retrouve donc bien la formule (5).
20
-
Les méthodes d’Adams sont construites sur ce schéma. Cependant, deux cas sont à envi-sager : le schéma explicite, dit ”prédicteur”, et le schéma implicite, dit ”correcteur”.
Adams-Bashforth : schéma explicite, prédicteur On a :
yn+1 − yn = hN∑
j=0
ξj ∆j− fn (20)
avec :
ξj = (−1)j∫ 1
0C−sj ds (21)
d’où le schéma explicite (AB) :
yn+1 − yn = hN∑
j=0
σN,j fn−j (22)
Les coefficients (ξj, σN,j) sont indépendants de f et sont calculés une fois pour toutes. Onutilise pour cela une fonction génératrice G(t) dont le développement de Mac-Laurin contientles coefficients (ξj) :
G(t) =∞∑
j=0
ξj tj =
∞∑
j=0
(−t)j∫ 1
0C−sj ds
=
∫ 1
0(1 − t)−s ds =
∫ 1
0e−s ln(1−t) ds
=−t
ln(1 − t) (1 − t) (23)
En identifiant les coefficients de même puissance en t, dans les équations (23) ci-dessus, onaboutit à :
ξ0 = 1 ξ3 =3
8ξ6 =
19087
60480
ξ1 =1
2ξ3 =
251
720ξ7 =
36799
120960
ξ2 =5
12ξ4 =
95
288ξ8 = . . .
La formule (22), qui donne explicitement (yn+1 − yn) en fonction des différences ∆j− fn estefficace dès lors que l’on peut faire des chargements dans la procédure.
Notons que si la différence du plus grand ordre (en N) est importante, la précision peuts’avérer insuffisante et le nombre N de termes pris en compte doit être augmenté.
Enfin, comme le nombre N est souvent fixé une fois pour toutes (pour des raisons deprogrammation informatique), il n’y a pas de raison particulière pour que les différences soientexplicitées. On peut ainsi redonner une nouvelle formulation à la méthode, en exprimant lesdifférences en terme d’ordonnées. En rassemblant les coefficients de même ordonnée, la formuled’AB apparâıt ainsi sous la forme :
σN,j = (−1)j[
Cjj ξj + Cj+1j ξj+1 + . . . + CNj ξN
]
(24)
21
-
Notons que la grandeur de ces coefficients ainsi que l’alternance des signes dans cette sériesont des désavantages de cette méthode.
Adams-Moulton : schéma implicite, correcteur
La méthode précédente utilise les différences de la fonction f construites sur les points d’abs-cisses tn+1 et tn ; elle n’est donc pas optimale. La méthode AM utilise une interpolation :
yn − yn−1 = hN∑
j=0
ξ?j ∆j− fn (25)
avec :
ξ?j = (−1)j∫ 0
−1C−sj ds (26)
d’où le schéma implicite (AM) :
yn − yn−1 = hN∑
j=0
σ?N,j fn−j (27)
De même que précédemment, on utilise une fonction génératrice G?(t) donnée par :
G?(t) =∞∑
j=0
ξ?j tj =
−tln(1 − t) (28)
En identifiant les coefficients de même puissance en t, on trouve :
ξ?0 = 1 ξ3 =−124
ξ6 =−86360480
ξ?1 =−12
ξ3 =−19720
ξ7 = . . .
ξ?2 =−112
ξ4 =−3160
ξ8 = . . .
En rassemblant les coefficients de même ordonnée, la formule AM apparâıt sous la forme :
σ?N,j = (−1)j[
Cjj ξ?j + Cj+1j ξ
?j+1 + . . . + CNj ξ?N
]
(29)
La différence de cette méthode avec AB réside dans le fait que seules les valeurs yp−1, . . . sontconnues, et que l’on détermine yp au lieu de yp+1.
D’autre part, la forme particulière de l’équation suggère une procédure itérative, car ypapparâıt aussi dans le membre de droite, comme argument de fp. La solution est très rapidesi h est suffisamment petit et si le prédicteur est suffisamment précis.
Méthodes de Prédiction-Correction
Ces méthodes profitent des avantages des méthodes fermées type Adams-Moulton (de trèsbonne précision), en réduisant les temps de calcul élevés : il suffit de trouver une valeur
estimée y(0)n proche de la valeur finale yn. Pour cela, y
(0)n (appelé prédiction) est obtenue par
22
-
une formule ouverte type Adams-Bashforth de même ordre. C’est cette valeur y(0)n qui est
introduite dans le membre de droite de la formule fermée.
Ces méthodes contiennent en particulier les méthodes AB et AM décrites ci-dessus. Le
processus de prédiction-correction (PC) s’arrête lorsque [f(ν)n − f (ν−1)n ] est négligeable (test
établi par rapport à un critère préalablement choisi). La dernière valeur f(ν)n est prise comme
valeur finale fn.
Puisque la valeur yn peut être entachée d’erreurs d’arrondi, suite à la sommation des séries,il faut être très prudent et, si possible, réévaluer le schéma AM une dernière fois.
Les constantes de stabilité (αN =∑
j |σN,j| et α?N =∑
j |σ?N,j |) sont beaucoup plus grandespour les méthodes AB que pour les méthodes AM, surtout lorsque N crôıt. En fait, le domainede stabilité absolu est faible pour une méthode (LM) explicite. C’est une des raisons pourlesquelles on utilise de préférence AM, malgré les complications apportées par le schémaimplicite. Les méthodes AM sont plus stables et plus précises.
L’erreur d’interpolation (f(t) − pn(t)) tend-elle vers zéro lorsque n → ∞ ?→ pour un support tj convenablement choisi, la réponse est certes positive (il y a conver-
gence), à condition toutefois que f(t) soit ”raisonnable”. C’est en particulier le cas pourles fonctions développables en série entière autour d’un point quelconque de l’intervallechoisi pour définir f(t).
→ dans certains cas, en particulier celui des points tj régulièrement espacés, une divergencepeut apparâıtre si n est trop grand : ce sont des fortes oscillations du polynôme entreles points tj .
⇒ d’où la nécessité de ne pas utiliser un ordre trop élevé.
3.5.2 Méthode de Bulirsch & Stoer
C’est une méthode à pas liés qui intègre des équations différentielles du premier degré dutype : ẏ = f(t, y(t)), avec y(0) = y0. Son intérêt réside dans son algorithme de prédiction-correction très efficace et rapide, ainsi que dans une stabilité très importante.
C’est une méthode dite d’extrapolation : l’idée consiste à évaluer y(t0 + H) sur un certainnombre de sous-pas (hs) de plus en plus petits par rapport au pas ”global” H, afin d’extrapolerà h = 0, une meilleure valeur de y : ỹ(t0 + H). L’inconvénient de cette méthode est la valeurélevée du pas global H qui diminue fortement la résolution temporelle de la solution.
Le prédicteur est à pas multiples, c’est-à-dire qu’il fournit plusieurs valeurs possiblesP (hs, t) - vecteur de IR
n - de y(t0 + H) suivant le sous-pas hs utilisé. Le correcteur donne lameilleure estimation, ỹ, de y(t0 + H) d’après les différentes valeurs P (hs, t), en extrapolantces valeurs pour h = 0 à l’aide d’une fraction rationnelle.
Algorithme de prédiction
La méthode numérique la plus simple (symétrique et explicite) est la méthode du point milieu,méthode de base telle que l’erreur soit une fonction paire de h (car on obtient une précision
23
-
double pour un même travail) :
y(t0) = y0
y1 = y0 + hs f(t0, y0)
yn+1 − yn−1 = 2h f(tn, yn)
Gragg (1965) a montré que cette méthode possède les propriétés de symétrie nécessaires.Malheureusement, la méthode du point milieu a un domaine de stabilité absolue vide, mêmesur un petit nombre de pas. D’où l’adoption d’une méthode modifiée : on prend un pasglobal H et un nombre S + 1 de sous-pas hs avec : Ns = [1, 2, 3, 4, 6, 8, 12, 16, . . .] pours = [0, 1, 2, 3, . . . , S] et hs = H/Ns.
Cette suite de sous-pas est en effet celle qui rend la sensibilité de la méthode minimale auxerreurs d’arrondi. Avec cette suite, tendant vers zéro, les (S + 1) déterminations P (hs) deỹ(t0 + H) sont telles que :
ỹ(t0 + H,hs) =1
4[ỹNs+1 + 2ỹNs + ỹNs−1] (30)
ce qui correspond bien à une méthode d’ordre 2.
Il est possible de former une combinaison linéaire des valeurs ỹ(t0 +H,hs) pour approcherỹ(t0 +H) ; ceci est équivalent à l’extrapolation à h = 0 d’un polynôme passant par les (S +1)valeurs calculées. Le processus est efficace si l’on peut trouver une méthode numérique pourlaquelle le développement asymptotique se mettra sous la forme :
P̃ (h, t) = ỹ(t) + h2 τ1(t) + h4 τ2(t) + . . .
Cette extrapolation est cependant meilleure lorsque l’on choisit une fonction rationnelle[6].
Algorithme de correction
Soit la fraction rationnelle C(i)S : IR → IRn. La valeur estimée de y(t) est : ỹ = C(i)S (0) ' C
(i)S ;
ces valeurs se calculent par récurrence (triangle de Romberg) :
C(i)−1 = 0
C(i)0 = P (hi, x)
C(i)k = C(i+1)k−1 +
C(i+1)k−1 − C(i)k−1
A (k ≥ 1)
(31)
avec :
A =(
hihi+k
)2[
1 −Ci+1k−1 − Cik−1Ci+1k−1 − Ci+1k−2
]
Pour éviter la formation de différences répétées, on peut établir un calcul par récurrencede ces différences. Ces formules sont calculées successivement pour s = 0, 1, 2, . . ., l’indexagesur k est choisi afin d’indiquer la séquence de calculs en cours.
24
-
Un test de précision est effectué afin d’arrêter le processus de recherche de la solution par lessous-pas. Avec un facteur de précision de l’ordre de 10−14, environ 10 étapes d’extrapolationsuffisent en général.
3.6 Intégrateurs linéaires du second degré
Il s’agit d’intégrer ici une équation du type : ÿ = f(t, y(t)), donc de passer directement dela dérivée seconde à la fonction inconnue. Cette formulation est donc beaucoup utilisée engéodésie spatiale (cf. équation de la dynamique (1)). L’algorithme PC général est le suivant :
Prédiction
y(1)n+1 +
P∑
p=1
αp yn+1−p = h2
N∑
p=1
βp fn+1−p (32)
Correction
yn+1 +M∑
p=1
α?p yn+1−p = h2
R∑
p=1
β?p fn+1−p + β?0 f(tn+1, y
(1)n+1)
(33)
La première formule prédit une valeur y(1)n+1, valeur qui est ensuite corrigée par la seconde
formule, étape généralement itérée. Cet algorithme PC est écrit en ”forme lagrangienne”,c’est-à-dire en fonction des valeurs descendantes fn+1−p et non en fonction des ”différencesrétrogrades”. De nombreux algorithmes sont souvent représentés sous forme de différences.
3.6.1 Méthode de (Adams-) Störmer
Parmi les méthodes les plus répandues, on a l’algorithme PC de Störmer de schéma général :
Prédiction (explicite) :
yn+1 − 2yn + yn−1 = h2K∑
p=0
b−p fn−p
Correction (implicite) :
yn+1 − 2yn + yn−1 = h2K∑
p=−1
b−p fn−p
Le mode opératoire est le suivant. D’après le développement de Taylor en tn de y, avec unreste intégrale :
y(tn+1) − 2y(tn) + y(tn−1) = h2∫ tn+1
tn−1G(t) ÿ(t) dt
où l’on remplace ÿ par son polynôme d’interpolation de Newton, aux points (tn, . . . , tn−K) :
ÿ(t) = ÿ(tn) +∆−ÿ(tn)
h(t − tn) + . . . +
∆K− ÿ(tn)
hKK!(t − tn) . . . (t − tn−K+1)
25
-
Après intégration :
y(tn+1) − 2y(tn) + y(tn−1) = h2K∑
p=0
βp ∆p−ÿ(tn) + r
Kn
avec :
βp =1
p!
∫ 1
0(1 − t)t . . . (t + p − 1)dt + 1
p!
∫ −1
0(−1 − t)t . . . (t + p − 1)dt
Exemple : βp = 1, 0, 1/12, 1/12, 19/240, 3/40, . . ..
D’où :
y∗n+1 − 2yn + yn−1 = h2K∑
p=0
βp ∆p− fn (prédiction)
Et si l’on remplace ÿ par son polynôme d’interpolation aux points (tn+1, . . . tn−K+1), onobtient :
yn+1 − 2yn + yn−1 = h2K∑
p=0
γp ∆p− f
∗n+1 (correction)
avec :
γp =1
p!
∫ 1
0(1 − t)(t − 1)t . . . (t + p − 2)dt + 1
p!
∫ −1
0(−1 − t)(t − 1)t . . . (t + p − 2)dt
Exemple : γp = 1,−1, 1/12, 0,−1/240,−1/240, . . ..
La méthode est parfois appelée méthode d’Adams-Störmer.
3.6.2 Méthode d’Adams-Moulton-Cowell (AMC)
Cette méthode a été programmée il y a plusieurs années par G. Balmino et son équipe, enplus de la méthode de Cowell, afin d’intégrer les équations du satellite artificiel. Nous l’avonsreprise, et reprogrammée (travaux de P.Schaeffer, 1993), afin d’effectuer des tests.
L’algorithme provient des travaux de Cohen et Hubbard, lui-même re-écrit dans l’articled’Oesterwinter & Cohen duquel nous nous sommes inspirés ([13]). Sa particularité est demélanger les coefficients de formules d’Adams, avec des coefficients de Cowell ; on a donc,en quelques sortes, deux intégrateurs en un : l’un pour passer de l’accélération à la position,l’autre pour passer de l’accélération à la vitesse.
En tant que méthode à pas liés, l’algorithme utilise le tableau d’initialisation suivant (avecles valeurs typiques : c = 14, qui est l’ordre de démarrage, a = b = 7, et m = 12 l’ordre de
26
-
progression) :| − c| − (c − 1)...| − (a + 1)| − a...| − 1| 0| 1...| − (b − 1)| − b| − (b + 1)...| (c − 1)| c|...
La phase de démarrage est la suivante (h est le pas) :
¨̄rn = ¨̄r0 pour : −a ≤ n ≤ b
r̄−1 = r̄0 − h ˙̄r0 + h2a+b∑
i=0
γi ¨̄rb−i
Les accélérations :
¨̄r−n =a+b∑
j=0
bj ¨̄r−n+1+j pour : n = a + 1, a + 2, . . . , c
¨̄rn =a+b∑
j=0
bj ¨̄rn−1−j pour : n = b + 1, b + 2, . . . , c
Les positions et vitesses, uniquement sur [a, b] :
r̄n = 2r̄n−1 − r̄n−2 + h2c∑
j=0
α∗j ¨̄rn−j pour : n = 1, 2, . . . , b
r̄−n = 2r̄−n+1 − r̄−n+2 + h2c∑
j=0
α∗j ¨̄r−n+j pour : n = 2, 3, . . . , a
et :
˙̄rn = ˙̄rn−1 + hc∑
j=0
β∗j ¨̄rn−j pour : n = 1, 2, . . . , b
˙̄r−n = ˙̄r−n+1 + hc∑
j=0
β∗j ¨̄r−n+j pour : n = 1, 2, . . . , a
27
-
A ce stade, le programme doit contrôler le nombre de cycles nécessaires à la convergence (engénéral 4 sont suffisants) ; pour cela, il est recommandé de tester la différence absolue dansles accélérations successives par rapport à une valeur a priori.
La phase de progression est double (puisque nous sommes dans un sch :’ema deprédiction et correction) ; soit, la prédiction :
r̄n = 2r̄n−1 − r̄n−2 + h2m∑
j=0
α′
j¨̄rn−1−j
˙̄rn = ˙̄rn−1 + hm∑
j=0
β′
j¨̄rn−1−j
et la correction, où de nouvelles accélérations seront calculées, soit :
r̄n = 2r̄n−1 − r̄n−2 + h2m∑
j=0
αj ¨̄rn−j
˙̄rn = ˙̄rn−1 + hm∑
j=0
βj ¨̄rn−j
De même qu’en phase de démarrage, il est important de tester la convergence de ce schéma.Nous avons cependant modifié légèrement l’ algorithme en choisissant de tester non plus lesaccélérations mais les vitesses successives. Nous avons pu contrôler que cela nous apporteune plus grande stabilité numérique des solutions (en référence à une méthode a priori ”plusstable”, celle de Bulirsch & Stoer).
3.6.3 Méthode de Cowell
Cette méthode est une des rares méthodes qui permettent d’intégrer directement deséquations différentielles du second degré. Elle a été appliquée par Cowell et Crommelin pour
mettre en évidence l’existence du 8ème satellite de Jupiter, ainsi que pour décrire très cor-rectement le retour de la comète de Halley en 1910.
C’est une méthode à pas liés qui nécessite la connaissance d’une position et d’une vitesseà l’instant t0 (conditions initiales du mouvement). Elle utilise l’interpolation polynomiale deStirling afin d’exprimer les dérivées en termes de différences. L’algorithme de Cowell à l’ordre2p intègre exactement toute solution polynomiale de degré 2p.
On peut noter aussi que cette méthode possède une extension, créée par Kulikov, quipermet de changer le pas en cours d’intégration.
Soit h le pas d’intégration. On considère deux valeurs de l’argument t : t = tk − h ett = tk + h. On développe ensuite la valeur de la ”position” x en fonction de ses dérivées, àl’aide d’une série de Taylor :
x(tk − h) = xk−1 = xk +∞∑
n=1
(−1)n hn
n!
(
dnx
dtn
)
k(34)
28
-
et :
x(tk + h) = xk+1 = xk +∞∑
n=1
hn
n!
(
dnx
dtn
)
k(35)
On introduit la différence du premier ordre ∆1 comme étant :
∆1k−1/2 = ∆1xk−1/2 = xk − xk−1
∆1k+1/2 = ∆1xk+1/2 = xk+1 − xk
Dès lors, la différence du second ordre est :
∆2k = ∆1k+1/2 − ∆1k−1/2 = xk+1 − 2xk + xk−1
En utilisant les deux premières relations (34) et (35), on obtient
∆2xk = 2∞∑
n=1
h2n
2n!
(
d2nx
dt2n
)
k
A partir de l’équation du mouvement d2x/dt2 = R(x, t), et avec f = h2ẍ = h2R, on introduitla valeur de x et l’on obtient :
∆2xk = fk + 2∞∑
0
h2n
(2n + 2)!
(
d2nf
dt2n
)
k
(36)
Les expressions des dérivées (dnf/dtn)k, en terme de différences, sont données par desformules d’interpolation polynomiale. Pour Cowell, on utilise la formule de Stirling :
f(tk + zh) = fk + zf1k +
z2
2!f2k +
z(z2 − 1)3!
f3k +z2(z2 − 1)
4!f4k + . . . (37)
⇒ A titre d’exemple, la formule de Bessel permet d’exprimer les dérivées de f en tk en termede différences, pour les lignes n = k + 1/2, et est exploitée dans une variante de laméthode de Cowell :
f(tk + zh) = fk + zf1k+1/2 +
z(z − 1)2!
f2k+1/2 +z(z − 1)(z − 2)
3!f3k+1/2
+(z + 1)z(z − 1)(z − 2)
4!f4k+1/2 + . . .
A partir de la formule de Stirling (37), les dérivées sont obtenues en dérivant f(tk + zh)par rapport à z. On a : df/dz = (df/dt).(dt/dz) et, comme t = tk + zh, dt/dz = h etdf/dz = h(df/dt)k, ainsi :
df
dz= f1k +
2z
2!f2k +
3z2 − 13!
f3k +4z3 − 2z
4!f4k + . . .
De même :d2f
dz2=
2
2!f2k +
6z
3!f3k +
12z2 − 24!
f4k + . . .
29
-
soit :
h2(
d2f
dt2
)
k
= f2k −1
12f4k + . . . (38)
On trouve ainsi la formule de base de la méthode de Cowell :
∆2xk = fk +1
12f2k −
1
240f4k +
31
60480f6k + . . . (39)
La formule de Cowell donnant directement xk est obtenue par deux sommations de la sérieprécédente, d’abord sur : k′ = j, (0, i) et ensuite sur i, (0, R − 1). On obtient finalement :
xk = f−2k +
1
12fk −
1
240f2k +
31
60480f4k −
289
3628800f6k +
317
22809600f8k + . . . (40)
avec :
f−2k = f−20 +
k−1∑
i=0
f−1i+1/2
f−1i+1/2 = f−1−1/2 +
i∑
j=0
fj
(41)
Les valeurs initiales des sommes f−20 et f−1−1/2 sont arbitraires ; elles sont choisies grâce à la
formule (38), à condition que les données de départ soient définies en terme de position et devitesse à l’instant t0 :
f−20 = x0 −1
12f0 +
1
240f20 −
31
60480f40 + . . .
f−1−1/2 = h ẋ0 −
1
2f0 +
1
12f10 −
11
720f30 + . . .
(42)
Les relations précédentes représentent le formalisme mathématique de Cowell. Pour débuterle procédé d’intégration, il faut calculer la table suivante :
f−20 , f−1−1/2, f−2, f−1, f0, f1, f2
De plus, lorsque l’on calcule les valeurs initiales des deux premières sommes, équations(42), on doit faire attention à la précision, notamment pour la seconde, car l’erreur sur ceterme est proportionnelle au temps.
Ensuite, le second membre des équations de la dynamique doit être calculé pour différentsinstants autour de t0 :
t0 − 3h, t0 − 2h, t0 − h, t0, t0 + h, t0 + 2h, t0 + 3h
En partant du fait que les différences du sixième ordre sont constantes (hypothèse principalede la méthode), et en tenant compte de la relation (38) et de la formule donnant les ordonnéesfk (due à Tokmalayena), les formules utilisées dans les programmes sont les suivantes :
30
-
x−3 = f−20 − 3f−1−1/2 +
237671
3628800f−3 +
645569
604800f−2 +
91415
48384f−1 +
18937
181440f0
− 14513241920
f1 +11729
604800f2 −
9829
3628800f3
x−2 = . . .
...
(43)
le vecteur initial x0 étant déjà disponible. Les valeurs initiales des sommes (42) peuvent êtrecalculées par :
f−20 = x0 +289
3628800f−3 −
599
604800f−2 +
1793
241920f−1 −
2497
25920f0
+1793
241920f1 −
599
604800f2 +
289
3628800f3
(44)
et :
f−1−1/2 = hẋ0 −
191
120960f−3 +
211
15120f−2 −
7843
120960f−1 −
1
2f0
+7843
120960f1 −
211
15120f2 +
191
120960f3
(45)
le vecteur initial ẋ0 étant également disponible.
Une procédure itérative est à mettre en place. On considère le second membre des équationsdu mouvement comme constant pendant l’intervalle de temps [t0 − 3h, t0 + 3h] et égal à f0,qui est calculée avec x0. Les sommes (42) et (43) sont calculées, puis les valeurs de f pourtous les temps en utilisant (41) et f = h2ẍ = h2R. Dès lors, les sommes (42) et (43) sontrecalculées n fois avec les nouvelles valeurs fi. Le procédé d’approximations successives estpoursuivi jusqu’à ce que les différences entre deux valeurs consécutives des modules de f −20 ,f−1−1/2, et f soient inférieures au facteur de convergence choisi au départ.
31
-
4 Méthode d’Encke
4.1 Introduction
Le principe de cette méthode est d’intégrer les équations du mouvement d’un corps Spar rapport au mouvement de référence d’un corps fictif S̃ ; ce dernier étant prédéterminé enfonction des conditions initiales et de l’environnement (modèle physique). Ainsi, les grandeurscaractéristiques du mouvement différentiel conservent des amplitudes faibles, ce qui permetde gagner en précision. Dans le cadre des calculs d’orbites, l’application de cette méthodeconsiste ainsi à intégrer le mouvement du satellite par rapport à une orbite ”moyenne” commel’illustre la figure (2).
.corps attracteur
mouvement résiduel
orbite réelle
orbite moyenne
Fig. 2 – Méthode d’Encke pour le calcul d’orbites.
Pour les calculs d’orbites, on peut utiliser des variables cartésiennes (coordonnées rectan-gulaires) pour lesquelles les équations du mouvement constituent un système différentiel dedegré 2 et de dimension 3 ou des éléments elliptiques pour lesquels les équations du mouve-ment sont les équations de Lagrange et/ou les équations de Gauss [5].
Les mouvements de S et de S̃ doivent être décrits siuvant le même type de variables, mêmesi, dans la pratique, on part toujours des élémlents elliptiques usuels (moyens) pour décrirela trajectoire de S̃.
4.2 Mouvement de référence
Dans le cas de satellites artificiels terrestres, on sait que les orbites s’écartent peu d’ellipseskepleriennes en précession. En éléments elliptiques, ceci se traduit, pour cette ellipse moyennede référence, par les relations :
ã = ã0
ẽ = ẽ0
Ĩ = Ĩ0
Ω̃ = Ω̃0 +˙̃Ω0(t − t0)
32
-
ω̃ = ω̃0 + ˙̃ω0(t − t0)M̃ = M̃0 + n̄0(t − t0)
où les éléments initiaux (ã0, ẽ0, Ĩ0, Ω̃0, ω̃0, M̃0) ainsi que les termes de variations séculaires
( ˙̃Ω0, ˙̃ω0, n̄0 =˙̃M0) dépendent des caractéristiques moyennes du mouvement ainsi que des
forces considérées.
Pour déterminer cette ellipse précessante ”moyenne”, on peut effectuer une intégrationnumérique avec un modèle de forces simplifié pour déterminer les éléments elliptiques à partirdesquels on peut, par moindres carrés, déterminer les éléments moyens. On peut égalementutiliser des théories analytiques telles que [4], fournissant les éléments elliptiques osculateursen fonction des éléments moyens.
Si l’on utilise des coordonnées rectangulaires, il existe des relations ”classiques” permettantde déterminer ces coordonnées à partir des éléments elliptiques (voir [5], entre autres).
4.3 Equations différentielles
4.3.1 Cas des éléments elliptiques usuels
Dans le cas des éléments elliptiques ”usuels”, on part des équations de Gauss-Lagrange dela forme :
ȧ = fa
ė = fe
İ = fI
Ω̇ = fΩ
ω̇ = fω
Ṁ = fM
et on utilise les décompositions a = ã0 +∆a,..., Ω = Ω̃0 +˙̃Ω0(t− t0)+∆Ω,... pour finalement
aboutir au système différentiel :
d∆a
dt= fa
d∆e
dt= fe
d∆I
dt= fI
d∆Ω
dt= fΩ − ˙̃Ω0
d∆ω
dt= fω − ˙̃ω0
33
-
d∆M
dt= fM − n̄0
que l’on résout à l’aide d’une méthode d’intégration numérique à partir des conditions ini-tiales : ∆a0 = a0 − ã0, . . . ,∆M0 = M0 − M̃0.
A chaque pas de calcul de l’intégrateur numérique, on détermine ainsi a = ã + ∆a,...,M = M̃ + ∆M et on peut également avoir accès aux coordonnées rectangulaires à l’aide desrelations de passage précédemment évoquées.
4.3.2 Cas des coordonnées rectangulaires
Mouvement de référence. Nous partons du mouvement de référence vu dans le repèremobile défini par :
- le vecteur P̄ unitaire passant par le périastre de l’ellipse en précession,
- le vecteur Q̄ unitaire, orthogonal à P̄ dans le plan de cette ellipse.
Dans ce paragraphe, nous appellerons X,Y,Z les coordonnées du système d’axes del’intégration numérique ; le repère formé par (O,P,Q) définissant un système de coordonnées(, x, y), avec :
r̄ = xP̄ + yQ̄
˙̄r = ẋP̄ + ẏQ̄ + x ˙̄P + y ˙̄Q
¨̄r = ẍP̄ + ÿQ̄ + 2ẋ ˙̄P + 2ẏ ˙̄Q + x ¨̄P + y ¨̄Q (46)
On utilise également les formules suivantes (où E est l’anomalie excentrique) :
r = a(1 − e cos E)M = E − e sinE = n̄(t − t0)x = a(cos E − e) = r cos vy = a
√
1 − e2 sinE = r sin vẋ = −a sinE Ėẏ = a
√
1 − e2 cos E Ė
ẍ = −a(sinEË − cos EĖ2) = aĖ2 e − cos E1 − e cos E = −aĖ
2 cos v
ÿ = a√
1 − e2(cos EË − sinEĖ2) = −aĖ2√
1 − e2 sinE1 − e cos E = −aĖ
2 sin v
On a donc :
¨̄r = −a3
r2n̄2 cos v P̄ − a
3
r2n̄2 sin v Q̄ + ρ̄ (47)
avec :ρ̄ = 2ẋ ˙̄P + 2ẏ ˙̄Q + x ¨̄P + y ¨̄Q (48)
Attention, alors que l’on a bien ñ20 ã30 = µ, on n’a pas n̄
2 a3 = µ. On peut transformerl’équation précédente en remplaçant cos v par x/r et sin v par y/r ; d’où :
¨̄r = −n̄2 a3
r3(xP̄ + yQ̄) + ρ̄
34
-
c’est-à-dire :
¨̄r = −n̄2 a3
r3r̄ + ρ̄ (49)
Le calcul du vecteur d’accélération apparente ρ̄ se fait comme suit :
P̄ =
cos Ω cos ω − cos I sinω sinΩsinΩ cos ω + cos I sinω cosΩsin I sinω
=
PXPYPZ
= −∂Q̄
∂ω
Q̄ =
− cos Ω sinω − cos I cos ω sinΩ− sinΩ sinω + cos I cos ω cos Ωsin I cos ω
=
QXQYQZ
=
∂P̄
∂ω
D’où (I étant constant pour le mouvement de référence, ainsi que Ω̇ et ω̇) :
˙̄P =∂P̄
∂ΩΩ̇ +
∂P̄
∂ωω̇
˙̄Q =∂Q̄
∂ΩΩ̇ +
∂Q̄
∂ωω̇
¨̄P =∂2P̄
∂Ω2Ω̇2 + 2
∂2P̄
∂Ω∂ωΩ̇ω̇ +
∂2P̄
∂ω2ω̇2
¨̄Q =∂2Q̄
∂Ω2Ω̇2 + 2
∂2Q̄
∂Ω∂ωΩ̇ω̇ +
∂2Q̄
∂ω2ω̇2
avec :
∂P̄
∂Ω=
−PYPX0
,
∂Q̄
∂Ω=
−QYQX0
∂P̄
∂ω= Q̄ ,
∂Q̄
∂ω= −P̄
∂2P̄
∂Ω2=
−PX−PY
0
,
∂2P̄
∂Ω∂ω=
∂Q̄
∂Ω,
∂2P̄
∂ω2= −P̄
∂2Q̄
∂Ω2=
−QX−QY
0
,
∂2Q̄
∂Ω∂ω= −∂P̄
∂Ω,
∂2Q̄
∂ω2= −Q̄
On utilise enfin, dans la formule (48), les expressions de x, y, ẋ, ẏ pour le mouvement deréférence.
Mouvement différentiel. Le système des équations du mouvement en coordonnées rec-tangulaires est re-écrit en mettant en évidence le terme principal du potentiel du corps central,et les autres forces perturbatives ∆F̄ :
¨̄r = −µ r̄r3
+ ∆F̄ (50)
35
-
et le système pour le mouvement de référence est, d’après ce qui précède :
¨̄rref = −n̄2
a3refr3ref
r̄ref + ρ̄ref (51)
en écrivant explicitement ”ref” pour plus de clarté dans les variables (et pour éviter lesconfusions entre variables ã, les vecteurs ā, et les vecteurs de référencequ’il aurait fallu écrire˜̄a. Ici, n̄ est toujours le ”moyen” moyen mouvement de référence (identique à n̄0 des équationsxx).
Des équations (50) et (51), on obtient :
¨̄r − ¨̄rref = ∆¨̄r = −µ(
r̄
r3− n̄
2
µ
a3refr3ref
r̄ref
)
− ρ̄ref + ∆F̄ (52)
On introduit, afin d’améliorer l’expression entre parenthèses ci-dessus, le moyen mouvement
képlérien de référence : nref(= ñ0) =√
µ/a3ref(=√
µ/ã30), et donc :
∆¨̄r = −µ
r̄
r3−(
n̄
nref
)2r̄refr3ref
− ρ̄ref + ∆F̄ (53)
Sous cette forme, (53) pose un problème numérique car les deux termes du crochet son trèsvoisins (si l’ellipse de référence est bien choisie). On peut utiliser la double précision (en 128bits) afin d’effectuer cette soustraction (en ayant bien calculé tous les termes de référence endouble précision, avant). Ou bien, on peut aussi transformer cette différence suivant :
Posons : (n̄/nref)2 = 1 + δ, et ε̄ = ∆r̄ = r̄ − r̄ref (où δ est proche de zéro dans la pratique,
et ||ε̄|| reste petit) ; on écrit alors :
r̄
r3− (1 + δ) r̄ref
r3ref
=1
r3ref
[
r̄r3refr3
− (1 + δ)r̄ref
]
=1
r3ref
[
r̄
(
(
rrefr
)3
− 1)
,+ ε̄ − δ r̄ref
]
On a donc résumé le problème à une différence de scalaires, proches de l’unité, au lieu d’unedifférence de vecteurs. Soit alors β =
(
rref/r)3 − 1, cette différence. Nous allons transformer
cette opération en une somme de petites quantités, en posant :(
rref/r)2
= 1 + α, et β =
(1 + α)3/2 − 1 ; d’où :
∆¨̄r = −µD̄ + ∆F̄ − ρ̄ref (54)D̄ =
[
β(∆r̄ + r̄ref) + ∆r̄ − δ r̄ref]
avec les conditions initiales suivantes : ∆r̄0 = r̄0 − r̄ref(t0) et ∆ ˙̄r0 = ˙̄r0 − ˙̄rref(t0)
36
-
5 La circularisation
Les méthodes classiques d’intégration numérique (méthode de Cowell, méthodes d’Adams-Bashforth, d’Adams-Moulton, ..., voir sections précédentes) sont basées sur des approxima-tions polynomiales et intègrent donc exactement des fonctions polynomiales. Lorsque cesméthodes sont appliquées aux équations de la mécanique céleste et, plus particulièrement,aux équations du mouvement d’un satellite d’un corps central (à dominantes périodiques),elles peuvent théoriquement être sources d’instabilités numériques (par la propagation deserreurs).
A l’époque où les ordinateurs n’étaient pas des calculateurs aussi performants qu’aujour-d’hui (fin des années 60, début des années 70), une méthode permettant de modifier lescoefficients caractéristiques des méthodes d’intégration pour intégrer exactement des fonc-tions circulaires (d’où le nom de circularisation) a été développée par Bettis et Stiefel, [14],[2] et [3]. Le but de ce chapitre est de présenter cette méthode et son utilisation dans le cadrede la dynamique orbitale.
5.1 Présentation générale de la méthode appliquée à l’algorithme de Co-
well
On s’intéresse aux deux types d’équations différentielles ẍ(t) = f(x, t) et ẋ(t) = f(x, t). Onrésout ces équations par intégration numérique à l’aide des différences de la fonction f . Onse donne un pas d’intégration h et on définit ces différences par la relation de récurrence :
∆mfn = ∆m−1fn+ 1
2
− ∆m−1fn− 12
(55)
sachant que : ∆0fn = fn = f(x(nh), nh).
On résout ainsi les deux équations précédentes, respectivement, à l’aide des deux relationssuivantes qui, dans la pratique, sont tronquées à un indice m donné, ordre de la méthodeutilisée :
∆2x0 = h2
∞∑
k=0
αk ∆kfp− k
2
(56)
x1 − x0 = h∞∑
k=0
αk ∆kfp− k
2
(57)
Rappel :
− si p = 1 dans (56), on utilise la méthode de Cowell,− si p = 0, c’est la méthode de Störmer,− si p = 1 dans (57), on utilise la méthode d’Adams-Moulton,− si p = 0, c’est la méthode d’Adams-Bashforth.
37
-
Dans toute la suite de cette partie, on ne s’intéresse plus qu’à la seule méthode de Cowell[14]. On se place dans le contexte de la résolution de l’équation différentielle ẍ(t) = f(x, t)avec cette méthode, d’ordre n,
Rappel :
∆2x0 = h2
n∑
k=0
αk∆kf1− k
2
Les coefficients de la méthode classique peuvent être obtenus en utilisant la fonction spécifiquef(x, t) = zt/h. En résolvant l’équation différentielle avec cette fonction, on aboutit à :
x(t) =h2
(ln z)2z
th et : ∆2x0 =
zh2
(ln z)2
[
1 − 1z
]2
On peut montrer que :
∆kf1− k2
= z
[
1 − 1z
]k
En posant ε = 1 − z−1, on obtient ainsi la relation :(
ε
ln(1 − ε)
)2
= P (ε)
avec P (ε) =∑n
k=0 αk varepsilonk. Effectuant alors le développement en série entière de la
fonction génératrice ε 7→ P (ε), on obtient les coefficients classiques αk par identification. Al’ordre 6, par exemple, on a [14] :
(
ε
ln(1 − ε)
)2
' 1 − ε + 112
ε2 − 1240
ε4 − 1240
ε5 − 22160480
ε6 (58)
On désire adapter cette méthode de Cowell (”classique”) pour intégrer exactement desfonctions circulaires.
5.1.1 Position du problème
Supposons tout d’abord que l’on souhaite intégrer exactement les deux fonctions (t 7→cos ωt) et (t 7→ sinωt). La fonction spécifique devient donc : f(x, t) = eiωt. Afin de se ramenerà Cowell (où f(x, t) = z
th , il faut donc poser :
z = e2iσ et :σ = ωh/2
Pour que la méthode de Cowell intègre exactement les deux fonctions circulaires précédentes,il faut donc que la relation définissant P (ε) soit vérifiée pour :
ε = 1 − e−2iσ et :ε = 1 − e2iσ
Ceci revient à modifier deux coefficients du polynôme P , les deux coefficients de plus hautdegré, par exemple ; les autres coefficients demeurent ceux de la méthode classique.
38
-
Le nouveau jeu de coefficients αk permet alors d’intégrer exactement toute fonction de laforme (t 7→ Qn−2(t) + a cos ωt + b sinωt), Qn−2 désignant une fonction polynôme de degréinférieur ou égal à n − 2 [2].
On suppose maintenant que l’ordre de la méthode est pair (n = 2ν) et on souhaite intégrerexactement toute fonction de la forme :
t 7→ a0 +ν∑
j=1
(aj cos ωjt + bj sinωjt)
donc possédant ν fréquences. Pour ce faire, le polynôme P doit vérifier les 2ν + 1 relations :
(
εjln(1 − εj)
)2
= P (εj), j ∈ {−ν, ..., ν} (59)
avec ∀j ∈ {−ν, ..., ν}, , εj = 1 − e2iσj , σ−j = −σj et donc σ0 = 0.
Notant :
L(σ) =
(
ε
ln(1 − ε)
)2
=
(
sinσ
σ
)2
e−2iσ (60)
le problème est donc de déterminer les 2ν + 1 coefficients modifiés αk, k ∈ {0, 1, ..., 2ν} àpartir des 2ν + 1 relations L(σj) = P (εj), j ∈ {−ν, ..., ν}.
5.1.2 Méthode récurrente de calcul des coefficients modifiés
Le polynôme P cherché n’est autre que le polynôme interpolateur de la fonction L aux2ν + 1 points εj . Toute formule d’interpolation classique pourrait être utilisée ; c’est celle deLagrange qui est retenue. Les deux coefficients de plus haut degré de P peuvent ainsi êtredéterminés à l’aide de l’interpolation de Lagrange. Les autres pourraient l’être égalementmais ce serait fastidieux. On utilise donc une méthode récurrente.
Différences divisées de la fonction (x 7→ 1/x). Les différences divisées de la fonction(
x 7→ 1x)
interviennent directement dans les calculs de la méthode de circularisation.
Considérons donc la fonction g : x 7→ 1/x. La différence divisée d’ordre 0 de g (on utilisela notation simplifiée [x0] pour g[x0]) est [x0] = 1/x0. La formule de récurrence (13) donnealors facilement [x0, x1] = −1/x0x1. Il semble ainsi que :
[x0, ..., xk] = (−1)kk∏
i=0
1
xi(61)
En l’admettant pour les ordres inférieurs ou égaux à k, (13) donne :
[x0, ..., xk+1] = (−1)k+1k+1∏
i=0
1
xi
39
-
(61) est donc vérifiée, et (14) permet alors d’écrire :
k∏
i=1
1
xi= (−1)k−1
k∑
i=1
1
xi.Πi
avec Πi =∏k
j=1,j 6=i1
xi−xj.
Les deux relations (15) et (16) donnent alors (les coefficients cj sont arbitraires) :
k∏
i=1
1
xi= −ck +
k∑
i=1
(−1)k−1(1 + c1xi + c2x2i + ... + ck−1xk−1i ) + ckxkixi
.Πi (62)
Calcul des deux coefficients de plus haut degré. Le coefficient α2ν est le coefficientde plus haut degré du polynôme interpolateur de Lagrange de la fonction L. Par définitiondes différences divisées, ce coefficient est donc la différence divisée d’ordre 2ν L[σ−ν , ..., σν ].Or, α2ν ∈ IR et la fonction L a une formulation complexe. Il est donc nécessaire de calculerce coefficient d’une autre façon. P ayant pour expression :
P (ε) =ν∑
j=−ν
L(σj) prodνm=−ν,m6=j
ε − εmεj − εm
(63)
le coefficient de plus haut degré de P est donc :
αn =ν∑
j=−ν
L(σj) prodνm=−ν,m6=j
1
εj − εm(64)
soit encore :
αn = L(σ0)ν∏
m=−ν,m6=0
1
ε0 − εm+
−1∑
j=−ν
L(σj)ν∏
m=−ν,m6=j
1
εj − εm
+ν∑
j=1
L(σj)ν∏
m=−ν,m6=j
1
εj − εm(65)
avec ε0 = 0 et :ν∏
m=−ν,m 6=0
−1εm
=ν∏
m=1
1
ε−mεm=
ν∏
m=1
1
um
où um = 4 sin2 σm.
En opérant un changement d’indice, on aboutit finalement à l’expression :
αn = L(σ0)ν∏
k=1
1
uk
+ν∑
k=1
L(σk)ε−k(ε−k − 1)ν−1 − L(σ−k)εk(εk − 1)ν−1(εk − ε−k)uk
.Πk (66)
40
-
où :
Πk =ν∏
m=1, m6=k
1
uk − um
Utilisant alors la suite polynomiale Sn dont les propriétés sont exposées plus loin, on aboutità :
αn = L(σ0)ν∏
k=1
1
uk
+ν∑
k=1
[
S2ν−4(uk)
uν−1k+
S2ν−2(uk)
uνk
]
.Πk4σ2k
(67)
Or :S2ν−4(uk)
uν−1k+
S2ν−2(uk)
uνk= (−1)ν [1 + Q∗ν−2(uk)]
où Q∗p désigne une fonction polynôme de degré p dont le terme constant est nul.
D’après le calcul des différences divisées de la fonction (x 7→ 1/x) et les propriétés de cesdifférences (les coefficients cj sont arbitraires) :
ν∏
k=1
1
uk= −cν +
ν∑
k=1
(−1)ν−1(1 + c1uk + c2u2k + ... + cν−1uν−1k ) + cνuνkuk
.Πk
Prenant cν = cν−1 = 0, on obtient alors :
αn = (−1)ν−1ν∑
k=1
[
1 + c1uk + ... + cν−2uν−2k
uk− 1 + Q
∗ν−2(uk)
4σ2k
]
.Πk (68)
Les coefficients cj , j ∈ {1, ..., ν − 2}, étant arbitraires, on peut les choisir de façon à vérifier :
1 + c1uk + ... + cν−2uν−2k = 1 + Q
∗ν−2(uk)
ce qui donne finalement :
αn = −ν∑
k=1
S2ν−3(uk)
uν−1k.
[
1
uk− 1
4σ2k
]
.Πk (69)
où αn est donc la (ν − 1)ème différence divisée de la fonction :
u 7→ S2ν−3(u)uν−1
.
[
1
u− 1
4σ2
]
aux points u1, ..., uν .
Considérons maintenant le coefficient αn−1. Par identification à partir de l’expression dupolynôme interpolateur P (63) :
41
-
αn−1 = −ν∑
k=−ν
L(σk)
∑νm=−ν, m6=k εm
∏νm=−ν,m6=k(εk − εm)
(70)
En isolant le terme correspondant à k = 0, on aboutit à l’expression :
αn−1 =
(
1 −ν∑
m=1
um
)
αn −L(σ0)
∏νm=1 um
+ν∑
k=−ν, k 6=0
L(σk)εk − 1
∏νm=−ν,m6=k(εk − εm)
(71)
Après un calcul similaire à celui mené pour αn, on aboutit à :
αn−1 −(
1 −ν∑
m=1
um
)
αn = −ν∑
k=1
S2ν−5(uk)
uν−2k.
[
1
uk− 1
4σ2k
]
.Πk (72)
où αn−1 − (1 −∑ν
m=1 um)αn est donc la (ν − 1)ème différence divisée de la fonction :
u 7→ S2ν−5(u)uν−2
.
[
1
u− 1
4σ2
]
aux points u1, ..., uν .
Il reste désormais à déterminer les autres coefficients modifiés du polynôme P .
Calcul des autres coefficients. On veut calculer les coefficients modifiés restants αm, m ∈{1, ..., n − 2}. Pour ce faire, on suppose que l’on connâıt le jeu des coefficients modifiés pourla méthode d’ordre (n − 2) : α∗1, ..., α∗n−2, et que l’on connâıt également les deux coefficientsde plus haut degré pour la méthode d’ordre n calculés précédemment : αn−1 et αn.
On dispose de P ∗, polynôme interpolateur de L, de degré n−2, aux points ε0, ε±1, ..., ε±(ν−1)et on s’intéresse au polynôme interpolateur P de L, de degré n, aux points ε0, ε±1, ..., ε±ν .Un polynôme ayant pour zéros les points 0, ε±1, ..., ε±(ν−1) est :
ε.(ε2 − u1ε + u1)...(ε2 − uν−1ε + uν−1)On peut donc écrire :
∀ε ∈ IR, P (ε) = P ∗(ε) + ε.(ε2 − u1ε + u1)...(ε2 − uν−1ε + uν−1).(aε + b) (73)
Pour déterminer a et b, on identifie les deux termes de plus haut degré des deux membres