
Signaux et Systèmes Discrets - Inriapeople.rennes.inria.fr/Olivier.Sentieys/teach/Signaux...Signaux...
17
Signaux et Syst` emes Discrets Olivier Sentieys ENSSAT - Universit´ e de Rennes 1 IRISA - ´ Equipe de recherche R 2 D 2 [email protected] http://r2d2.enssat.fr/enseignements/Tns 22 f´ evrier 2006 ∑ − = − = Signaux et Syst` emes Discrets Plan Introduction Signaux ` a temps discrets D´ efinition Op´ erations sur les signaux ` a temps discret Signaux ` a temps discret de base Propri´ et´ es des signaux ` a temps discret 2/ 68 Signaux et Syst` emes Discrets Plan Transform´ ee en Z D´ efinition de la transform´ ee en Z Domaine de convergence D CV Propri´ et´ es de la TZ Transform´ ee en Z inverse Transform´ ee de Fourier d’un signal discret Rappels sur les signaux continus TF d’un signal discret non p´ eriodique TF d’un signal discret p´ eriodique Condition d’existence de la TF Propri´ et´ es de la transform´ ee de Fourier Transform´ ee de Fourier discr` ete 3/ 68 Signaux et Syst` emes Discrets Plan Syst` emes discrets Syst` emes discrets lin´ eaires invariants Repr´ esentation temporelle des syst` emes discrets Analyse des syst` emes discrets par la transform´ ee en Z Repr´ esentation fr´ equentielle des syst` emes discrets ´ Echantillonnage et reconstruction des signaux Historique du Th´ eor` eme d’´ echantillonnage ´ Echantillonnage id´ eal Th´ eor` eme d’´ echantillonnage de Shannon Reconstruction du signal continu ` a partir de ses ´ echantillons Exemple pratique d’´ echantillonnage Reconstruction r´ eelle du signal continu 4/ 68
Transcript of Signaux et Systèmes Discrets - Inriapeople.rennes.inria.fr/Olivier.Sentieys/teach/Signaux...Signaux...
Signaux et Systemes Discrets
Olivier Sentieys
ENSSAT - Universite de Rennes 1IRISA - Equipe de recherche R2D2
http://r2d2.enssat.fr/enseignements/Tns
22 fevrier 2006
∑−
=−=
Signaux et Systemes Discrets
Plan
Introduction
Signaux a temps discretsDefinitionOperations sur les signaux a temps discretSignaux a temps discret de baseProprietes des signaux a temps discret
2/ 68
Signaux et Systemes Discrets
Plan
Transformee en ZDefinition de la transformee en ZDomaine de convergence DCV
Proprietes de la TZTransformee en Z inverse
Transformee de Fourier d’un signal discretRappels sur les signaux continusTF d’un signal discret non periodiqueTF d’un signal discret periodiqueCondition d’existence de la TFProprietes de la transformee de FourierTransformee de Fourier discrete
3/ 68
Signaux et Systemes Discrets
Plan
Systemes discretsSystemes discrets lineaires invariantsRepresentation temporelle des systemes discretsAnalyse des systemes discrets par la transformee en ZRepresentation frequentielle des systemes discrets
Echantillonnage et reconstruction des signauxHistorique du Theoreme d’echantillonnageEchantillonnage idealTheoreme d’echantillonnage de ShannonReconstruction du signal continu a partir de ses echantillonsExemple pratique d’echantillonnageReconstruction reelle du signal continu
4/ 68
Signaux et Systemes Discrets
Introduction
Introduction
Traitement (numerique) du signal (numerique) :
Modeliser – ou identifier – consiste en l’analyse d’un signalou d’un systeme, dans le domaine temporel ou frequentiel (i.e.spectral). On parlera egalement d’estimation.
Synthetiser – ou generer – un signal.
Transmettre un ensemble de signaux sur un support.
Transformer un ensemble de signaux a l’aide d’un systemelineaire (filtrer, moduler, coder, . . .) ou non lineaire (()2, | |,. . . ).
5/ 68
Signaux et Systemes Discrets
Introduction
Classification des signaux (1/2)
1 Dimensionnalite = fonction de la dimension du signal ou desdimensions des variables du signal :
Signal scalaire pouvant prendre des valeurs reelles oucomplexes : x (t)Signal vectoriel pouvant prendre des valeurs reelles oucomplexes : [R,V ,B ] = TV (t)Signal mono-dimensionnel qui correspond a des fonctions a unseul argument, comme par exemple le tempsSignal multi-dimensionnel qui correspond a des fonctions aplusieurs arguments : [I ] = TV (t , x , y)
2 Caracteristiques temporellesSignaux a temps continu ou signaux analogiques. La variablet ∈ R. On notera un signal analogique de la facon suivante :sa(t)Signaux a temps discret : ces signaux sont definis pourcertaines valeurs de la variable t : s(n) = s(nT ) = s(t)|t=nT
6/ 68
Signaux et Systemes Discrets
Introduction
Classification des signaux (2/2)
3 Valeurs prises par le signal
Signaux a valeurs continues pouvant prendre une valeur reelledans un intervalle continuSignaux a valeurs discretes prenant seulement des valeursparmi un ensemble fini de valeurs possibles : voir quantification
4 Predictibilite des signaux
Signaux deterministes qui peuvent etre representesexplicitement par une fonction mathematiqueSignaux aleatoires qui evoluent dans le temps d’une maniereimprevisible. Il est cependant possible de decriremathematiquement certaines caracteristiques statistiques deces signaux
7/ 68
Signaux et Systemes Discrets
Signaux a temps discrets
1. Signaux a temps discrets
1 Definition
2 Operations sur les signaux a temps discret
3 Signaux a temps discret de base
4 Proprietes des signaux a temps discret
8/ 68
Signaux et Systemes Discrets
Signaux a temps discrets
Definition
1.1 Signaux a temps discret : definition
Sequence X de nombres dans laquelle le n ieme nombre estx (n). On ecrira :
X = {x (n)} −∞ < n < ∞
Exemple de signal discret
x (n) est egal a la valeur du signal analogique xa(t) au tempst = nT , i.e.
x (n) = xa(nT ) −∞ < n < ∞
T : periode d’echantillonnage, fe = 1T : frequence
d’echantillonnage
Exemple de signal de parole : T = ?
9/ 68
Signaux et Systemes Discrets
Signaux a temps discrets
Operations sur les signaux a temps discret
1.2 Operations sur les signaux a temps discret
1 +, −, × de signaux
2 +, −, × par une constante
3 Decalage de n0 echantillons
y(n) = x (n − n0)
4 Convolution
5 Correlation
6 . . .
10/ 68
Signaux et Systemes Discrets
Signaux a temps discrets
Signaux a temps discret de base
1.3 Signaux a temps discret de base (1/2)
1 Impulsion unite δ(n), δ(n − k)2 Echelon unite u(n)
u(n) =∞∑
k=0
δ(n − k)
u(n) =n∑
k=−∞δ(k)
δ(n) = u(n) − u(n − 1)
3 x1(n) = Aαn
x2(n) = Aαnu(n)
11/ 68
Signaux et Systemes Discrets
Signaux a temps discrets
Signaux a temps discret de base
1.3 Signaux a temps discret de base (2/2)
4 Sinusoıde, periode N = ?
x3(n) = A cos (nω0 + ϕ)
5 Signal complexex4(n) = e jnω0
6 Cas general
x (n) =+∞∑
k=−∞x (k)δ(n − k).
e.g. p(n) = δ(n) + 0.5δ(n − 2) − 0.5δ(n − 4)
12/ 68
Signaux et Systemes Discrets
Signaux a temps discrets
Proprietes des signaux a temps discret
1.4 Proprietes des signaux a temps discret (1/2)
1 Signaux causauxx (n) = 0, ∀n < 0
2 Energie totale : finie ou infinie
E (∞) �∞∑
n=−∞|x (n)|2 (1)
3 Puissance moyenne : finie ou infinie
Pm � limN→∞
1N
N2∑
n=−N2
|x (n)|2 (2)
4 Periodique de periode P : x (n + P) = x (n) ∀n sinon x (n)est aperiodique
13/ 68
Signaux et Systemes Discrets
Signaux a temps discrets
Proprietes des signaux a temps discret
1.4 Proprietes des signaux a temps discret (2/2)
5 Intercorrelation entre deux signaux x (n) et y(n)
Rxy(k) �+∞∑
n=−∞x (n)y(n + k) = Ryx (−k) (3)
6 Autocorrelation d’un signal x (n)
Rxx (k) �+∞∑
n=−∞x (n)x (n + k) = Rxx (−k) (4)
7 Convolution lineaire entre deux signaux x (n) et y(n)
ϕxy(k) = x (k) ∗ y(k) �+∞∑
n=−∞x (n)y(k − n) (5)
14/ 68
Signaux et Systemes Discrets
Transformee en Z
2. Transformee en Z
1 Definition de la TZ
2 Domaine de convergence
3 Proprietes de la transformee en Z
4 Transformee en Z inverse
15/ 68
Signaux et Systemes Discrets
Transformee en Z
Definition de la transformee en Z
2.1 Definition de la transformee en Z
La transformee en Z directe bilaterale d’un signal a temps discretx (n) est definie par :
Z [x (n)] = X (z ) =∞∑
n=−∞x (n)z−n (6)
ou z est une variable complexe (z ∈ C) definie partout ou cetteserie converge.Les signaux discrets etant la plupart du temps causaux on definitplutot la transformee en Z (dite unilaterale) par :
Z [x (n)] = X (z ) =∞∑
n=0
x (n)z−n (7)
16/ 68
Signaux et Systemes Discrets
Transformee en Z
Domaine de convergence DCV
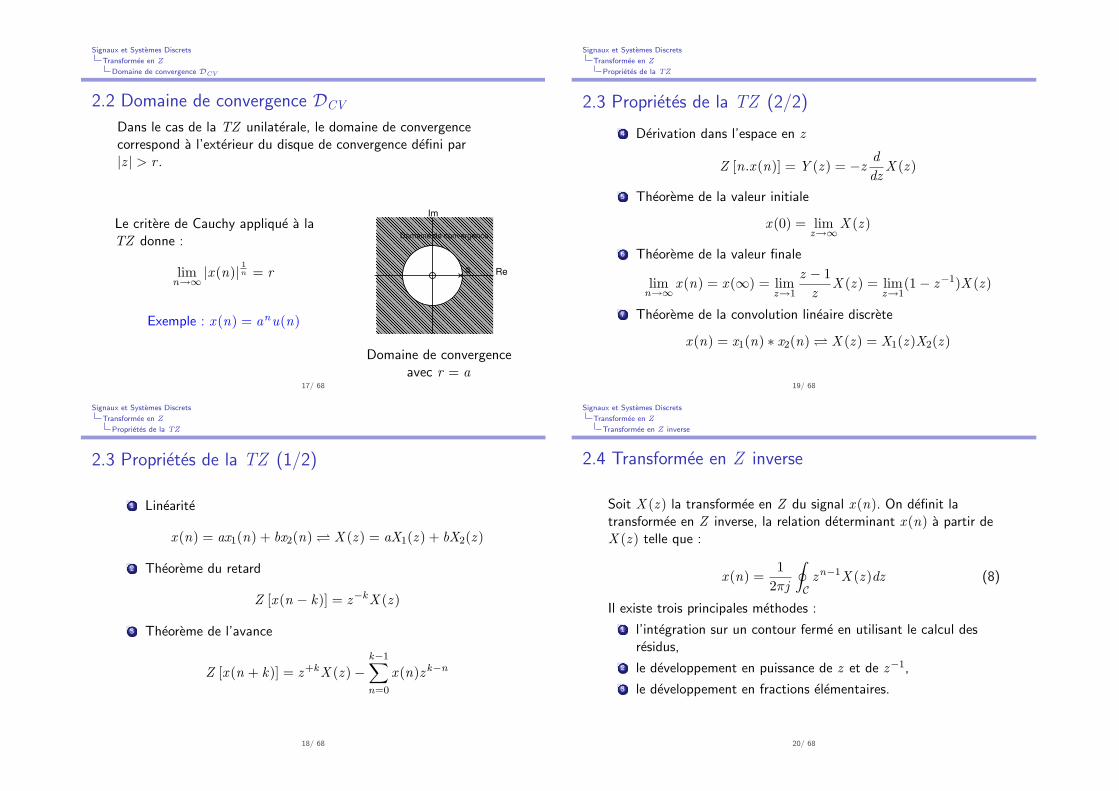
2.2 Domaine de convergence DCV
Dans le cas de la TZ unilaterale, le domaine de convergencecorrespond a l’exterieur du disque de convergence defini par|z | > r .
Le critere de Cauchy applique a laTZ donne :
limn→∞
|x (n)| 1n = r
Exemple : x (n) = anu(n)
a Re
Im
Domaine de convergence
Domaine de convergenceavec r = a
17/ 68
Signaux et Systemes Discrets
Transformee en Z
Proprietes de la TZ
2.3 Proprietes de la TZ (1/2)
1 Linearite
x (n) = ax1(n) + bx2(n) � X (z ) = aX1(z ) + bX2(z )
2 Theoreme du retard
Z [x (n − k)] = z−kX (z )
3 Theoreme de l’avance
Z [x (n + k)] = z+kX (z ) −k−1∑n=0
x (n)z k−n
18/ 68
Signaux et Systemes Discrets
Transformee en Z
Proprietes de la TZ
2.3 Proprietes de la TZ (2/2)
4 Derivation dans l’espace en z
Z [n.x (n)] = Y (z ) = −zddz
X (z )
5 Theoreme de la valeur initiale
x (0) = limz→∞
X (z )
6 Theoreme de la valeur finale
limn→∞
x (n) = x (∞) = limz→1
z − 1z
X (z ) = limz→1
(1 − z−1)X (z )
7 Theoreme de la convolution lineaire discrete
x (n) = x1(n) ∗ x2(n) � X (z ) = X1(z )X2(z )
19/ 68
Signaux et Systemes Discrets
Transformee en Z
Transformee en Z inverse
2.4 Transformee en Z inverse
Soit X (z ) la transformee en Z du signal x (n). On definit latransformee en Z inverse, la relation determinant x (n) a partir deX (z ) telle que :
x (n) =1
2πj
∮Czn−1X (z )dz (8)
Il existe trois principales methodes :
1 l’integration sur un contour ferme en utilisant le calcul desresidus,
2 le developpement en puissance de z et de z−1,
3 le developpement en fractions elementaires.
20/ 68

Signaux et Systemes Discrets
Transformee en Z
Transformee en Z inverse
TZ inverse par la methode des residus (1/2)
x (n) =∑
Tous les poles pi de R(z )
Residus de R(z ) aux poles pi (9)
avec R(z ) = zn−1X (z ) = N (z )D(z ) sous forme fractionnelle.
On notera plutot :
x (n) =∑
∀pi∈DCV
Res(zn−1X (z ), pi
)(10)
1 Poles simples de R(z ) : pi tel que D(z )|pi = 0
Res (R(z ), pi) =[(z − pi)
N (z )D(z )
]z=pi
(11)
21/ 68
Signaux et Systemes Discrets
Transformee en Z
Transformee en Z inverse
TZ inverse par la methode des residus (2/2)
2 Poles multiples d’ordre m de R(z ).Si D(z ) = (z − pi)mF (z ) avec F (pi) �= 0 alors
Res (R(z ), pi) =1
(m − 1)!dm−1
dzm−1
[(z − pi)m
N (z )D(z )
]z=pi
(12)
Exemples :
X (z ) =z
z − e−aT
X (z ) =z
(z − a)(z − b)
X (z ) =z
(z − 1)2
22/ 68
Signaux et Systemes Discrets
Transformee en Z
Transformee en Z inverse
TZ inverse par division polynomiale
X (z ) =N (z )D(z )
=∞∑
n=−∞cnz−n = c0+c1z−1+c2z−2+. . .+ck z−k+. . .
alorsx (n) = cn
Exemples :
X (z ) =0.5z
z 2 − 1.5z + 0.5=
0.5z−1
1 − 1.5z−1 + 0.5z−2
23/ 68
Signaux et Systemes Discrets
Transformee en Z
Transformee en Z inverse
TZ inverse par decomposition en fonctions rationnelles
On decompose X (z ) selon :
z−1X (z ) = α11
z − p1+ α2
1z − p2
+ . . . (13)
On aura alors par TZI :
x (n) = α1pn1 + α2pn
2 + . . . (14)
Exemple : X (z ) = z(z−a)(z−b)
Attention au cas des poles doubles (voir le detail dans le cours deMathematiques sur les fonctions holomorphes).
24/ 68

Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
3. Transformee de Fourier d’un signal discret
1 Rappels sur les signaux continus
2 TF d’un signal discret non periodique
3 TF d’un signal discret periodique
4 Condition d’existence de la TF
5 Proprietes de la transformee de Fourier
6 Transformee de Fourier discrete
25/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
Rappels sur les signaux continus
3.1 Rappels sur les signaux continus
Soit un signal analogique xa(t) dont la transformee de Fourier estdefinie par :
Xa(jω) =∫ ∞
−∞xa(t)e−jωtdt (15)
avec ω = 2πf .On retrouve le signal temporel a partir de sa transformee par latransformee de Fourier inverse definie par la relation suivante :
xa(t) =12π
∫ ∞
−∞Xa(jω)e jωtdω (16)
26/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
TF d’un signal discret non periodique
3.2 TF d’un signal discret non periodique (1/2)
Pour un signal x (n) discret quelconque non periodique, satransformee de Fourier (TF ) s’ecrit :
X (e jΩ) =∞∑
n=−∞x (n)e−jΩn (17)
X (e jΩ) peut etre exprime a partir de la transformee en Z par larelation :
X (e jΩ) =∞∑
n=−∞x (n)z−n
∣∣z=ejΩ = X (z )|z=ejΩ (18)
Cette equation implique que le TF n’existe que si le cercle unite,caracterise par z = ejΩ, appartient au domaine de convergence deX (z ).
27/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
TF d’un signal discret non periodique
3.2 TF d’un signal discret non periodique (2/2)
X (Ω) est periodique de periode 2π. Ceci implique que le spectred’un signal discret est periodique.
La TF inverse est obtenue a partir de la transformee en Z inversede X (z ). On obtient :
x (n) =12π
∫ 2π
0X (e jΩ)e jnΩdΩ =
12π
∫ π
−πX (e jΩ)e jnΩdΩ (19)
Sur la variable frequence f , la TF periodique de periode fe = 1/T s’ecrit :
X (f ) = X (ej2πfT ) =
∞Xn=−∞
x(n)e−j2πfnT (20)
x(n) =1
fe
Z fe
0X (f )ej2πfnTdf (21)
28/ 68

Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
TF d’un signal discret non periodique
TF d’un signal discret non periodique
Exemple : x (n) = anu(n)
0 2 4 6 8 10 12 14 16 180
0.5
1
an avec a=0.75
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
1
2
3
4
Module
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−1
−0.5
0
0.5
1Argument
29/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
TF d’un signal discret non periodique
TF d’un signal discret non periodique
Exemple : x (n) = an , pour n = 0 . . .N − 1
0 2 4 6 8 10 12 14 16 180
0.5
1
an limité à 6 points
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
1
2
3
4
Module
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−2
−1
0
1
2
Argument
30/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
TF d’un signal discret periodique
3.3 TF d’un signal discret periodique (1/2)
Pour un signal xp(n) discret periodique de periode N , unedecomposition en serie de Fourier doit etre utilisee sous la forme :
Xp(k) =N−1∑n=0
xp(n).e(−2jπ n.kN
), k = 0, 1 . . .N − 1 (22)
xp(n) =1N
N−1∑k=0
Xp(k).e(2jπ n.kN
), n = 0, 1 . . .N − 1 (23)
Sa Transformee de Fourier s’ecrit alors :
Xp(e jΩ) =2π
N
∞∑k=−∞
Xp(k)δ(
Ω − k2π
N
)(24)
31/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
TF d’un signal discret periodique
3.3 TF d’un signal discret periodique (2/2)
Exemple : x (n) = an , pour n = 0 . . .N − 1, periodique N
0 2 4 6 8 10 12 14 16 180
0.5
1
an périodique 6
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.50
1
2
3
4
Module
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5−1
−0.5
0
0.5
1Argument
32/ 68

Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
Condition d’existence de la TF
3.4 Condition d’existence de la TF (1/3)
Une condition suffisante a la convergence de la TF peut etredeterminee comme suit (x (n) est dite absolument sommable) :
|X (e jΩ)| ≤∞∑
n=−∞|x (n)| < ∞
De plus, la serie converge uniformement vers une fonction continuede Ω.Certaines sequences ne sont pas absolument sommables mais sontde carre sommable (ou a energie finie), i.e.
∞∑n=−∞
|x (n)|2 < ∞ (25)
33/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
Condition d’existence de la TF
3.4 Condition d’existence de la TF (2/3)
Ces sequences peuvent etre representees par une transformee de Fourier
mais sans convergence uniforme de la somme infinie definissant X (ejΩ).Cela signifie que l’erreur |X (ejΩ) − XM (ejΩ)| ne tend pas vers 0 quand
M → ∞ mais que par contre l’energie de l’erreur tend vers 0.
Exemple :
H (e jΩ) ={
1, |Ω| < Ωc
0, Ωc < |Ω| ≤ π� h(n) =
sinnΩc
nπ, −∞ < n < ∞
34/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
Condition d’existence de la TF
3.4 Condition d’existence de la TF (3/3)
HM (e jΩ) =M∑
n=−M
sinnΩc
nπe−jnΩ
35/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
Proprietes de la transformee de Fourier
3.5 Proprietes de la transformee de Fourier (1/2)
Linearite ou superposition
a.x (n) + b.y(n) � a.X (ejΩ) + b.Y (ejΩ)
Decalage en temps-frequence
x (n − n0) � e−jn0ΩX (ejΩ) x (n)ejnΩ0 � X (ej (Ω−Ω0))
Derivation en frequence
n.x (n) � jdX (ejΩ)
dΩ
Produit de convolution
x1(n) ∗ x2(n) =∞∑
i=−∞x1(i).x2(n − i) � X1(ejΩ).X2(ejΩ)
36/ 68

Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
Proprietes de la transformee de Fourier
3.5 Proprietes de la transformee de Fourier (2/2)
Theoreme du fenetrage (ou de la modulation)
x1(n).x2(n) � 12π
∫ π
−π
X1(ejΘ).X2(ej (Ω−Θ))dΘ
Theoreme de Parseval (conservation de la puissance d’un signal)
∞∑i=−∞
|x (i)|2 =12π
∫ π
−π
|X (ejΩ)|2dΩ
Si x (n) est une suite reelle, alors sa TF est symetrique conjuguee(partie reelle et module pairs ; partie imaginaire et phase impaires)
x (n) ∈ R � X (ejΩ) = X ∗(e−jΩ)
Densite spectrale d’energie (pour des signaux a energie finie)
SE (f ) = |X (ej2πfT )|2
37/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
Transformee de Fourier discrete
3.6 Transformee de Fourier discrete
X (k) =N−1∑n=0
x (n)e−j 2πknN , k = 0, · · · ,N − 1 (26)
x (n) =1N
N−1∑k=0
Xke j 2πknN , n = 0, · · · ,N − 1 (27)
�
����
���
�� ����������������
�
����
���
��������� ���������������
���
38/ 68
Signaux et Systemes Discrets
Transformee de Fourier d’un signal discret
Transformee de Fourier discrete
Proprietes de la TFD
Decalage en temps-frequence x (n − n0) � e−2jπkn0N X (k)
Produit de convolution circulaire
x1(n) � x2(n) =N−1∑i=0
x1(i).x2(n − i) � X1(k).X2(k)
avec x1(n) et x2(n) des signaux periodiques de periode N .
Theoreme de Parseval (conservation de la puissance d’un signal)
1N
N−1∑n=0
|x (i)|2 =N−1∑k=0
|X (k)|2
Proprietes de symetrie x (n) ∈ R � X (k) = X ∗(N − k)
Calcul rapide (Fast Fourier Transform, FFT )
39/ 68
Signaux et Systemes Discrets
Systemes discrets
4. Systemes discrets
1 Systemes lineaires invariants
2 Representation temporelle
3 Analyse par transformee en Z
4 Representation frequentielle
40/ 68
Signaux et Systemes Discrets
Systemes discrets
Systemes discrets lineaires invariants
4.1 Systemes discrets lineaires invariants
1 Un signal d’entree e(n) est transforme en un signal de sorties(n) :
s(.) = T [e(.)]
2 Un systeme est dit invariant en temps (ou au decalage) ssi :
e(n) T−→ s(n) ⇒ e(n − k) T−→ s(n − k) ∀e(.),∀k ∈ (N )
3 Un systeme est lineaire ssi :
T [a × e1(n) + b × e2(n)] = a × T [e1(n)] + b × T [e2(n)]
∀e1(.),∀e2(.),∀(a, b)
41/ 68
Signaux et Systemes Discrets
Systemes discrets
Systemes discrets lineaires invariants
Systemes lineaires invariants (SLI)
1 Causalite : un systeme est causal si un changement en sortiene precede pas un changement en entree.Un systeme lineaire invariant est causal si et seulement sih(n) = 0 pour n < 0.
2 Stabilite : un systeme est stable si a une entree borneecorrespond une sortie bornee. La condition de stabilite d’unsysteme s’ecrit :
+∞∑k=−∞
|h(k)| < +∞
Exemples : retard ideal, moyenneur, sans memoire, . . .
42/ 68
Signaux et Systemes Discrets
Systemes discrets
Representation temporelle des systemes discrets
Representation temporelle des systemes discrets
Strategie generale d’analyse d’un systeme lineaire invariant :
1 Decomposition du signal d’entree en une somme de signaux oufonctions de base.
e(n) =∑k
αkek (n)
2 Etude de la reponse du systeme pour l’ensemble des fonctions debase.
sk (n) = T [ek (n)]
3 Recomposition de la sortie en appliquant le principe desuperposition.
s(n) =∑k
αk sk (n)
43/ 68
Signaux et Systemes Discrets
Systemes discrets
Representation temporelle des systemes discrets
Produit de convolution (1/2)
e(n) =+∞∑
k=−∞e(k)δ(n − k)
s(n) = T [e(n)] = T [+∞∑
k=−∞e(k)δ(n − k)] =
+∞∑k=−∞
e(k)T [δ(n − k)]
On pose h(n) = T [δ(n)], alors
s(n) =+∞∑
k=−∞e(k)h(n − k) = e(n) ∗ h(n) = h(n) ∗ e(n)
44/ 68

Signaux et Systemes Discrets
Systemes discrets
Representation temporelle des systemes discrets
Produit de convolution (2/2)
Un systeme discret est donc entierement caracterise par sa reponseimpulsionnelle h(n). L’operation ∗ liant la sortie s(n) a l’entreee(n) et a la reponse impulsionnelle du systeme h(n) est appeleeproduit de convolution.Exemple
h(n) : reponse im-pulsionnelle
e(n) : entree dusysteme
s(n) : reponse dusysteme a l’entree
45/ 68
Signaux et Systemes Discrets
Systemes discrets
Representation temporelle des systemes discrets
Equation aux differences finies
Une equation aux differences finies peut s’ecrire sous la forme :
s(n) = −N∑
k=1
ak s(n − k) +M∑
k=0
bke(n − k) (28)
Systeme recursif ou non-recursif
Reponse impulsionnelle infinie (RII ou IIR) ou finie (RIF ouFIR)
46/ 68
Signaux et Systemes Discrets
Systemes discrets
Representation temporelle des systemes discrets
Fonction de transfert en z (1/2)
La fonction de transfert en z H (z ) d’un systeme est definie par :
H (z ) =S (z )E (z )
(29)
H (z ) est egalement la transformee en Z de la reponseimpulsionnelle h(n) du systeme.A partir de l’equation aux differences (28), on obtient :
H (z ) =∑M
k=0 bk z−k
1 +∑N
k=1 ak z−k=
N (z )D(z )
(30)
ou
H (z ) =∑M
k=0 bk zN−k
zN +∑N
k=1 ak zN−k(31)
47/ 68
Signaux et Systemes Discrets
Systemes discrets
Representation temporelle des systemes discrets
Fonction de transfert en z (2/2)
ou en faisant apparaıtre les poles et les zeros :
H (z ) = b0zN−M
∏Mi=1(z − zi)∏Ni=1(z − pi)
= b0
∏Mi=1(1 − ziz−1)∏Ni=1(1 − pi)z−1
(32)
L’equation precedente permet de tracer dans le plan complexe lediagramme des poles et des zeros.
Exemple :
H (z ) =1
1 + 0.5z−1
48/ 68

Signaux et Systemes Discrets
Systemes discrets
Analyse des systemes discrets par la transformee en Z
4.3 Analyse des SLD par la transformee en Z (1/3)
Soit le systeme decrit par S (z ) = H (z )E (z ), il s’agit decaracteriser s(n).
H (z ) =N (z )D(z )
, E (z ) =P(z )Q(z )
On a donc :
S (z ) =N (z )P(z )D(z )Q(z )
s(n) = TZ−1 [S (z )]
49/ 68
Signaux et Systemes Discrets
Systemes discrets
Analyse des systemes discrets par la transformee en Z
4.3 Analyse des SLD par la transformee en Z (2/3)
Sous la condition d’unicite des poles et des zeros, on peut ecrireY (z ) sous la forme :
S (z ) =N∑
k=1
Dk
1 − pk z−1+
L∑k=1
Qk
1 − qk z−1
s(n) =N∑
k=1
Dkpnk u(n)
︸ ︷︷ ︸r egime naturel
+L∑
k=1
Qkqnk u(n)
︸ ︷︷ ︸r egime force
L’equation precedente montre que le signal de sortie peut etreconsidere comme compose de deux parties :
une reponse en regime naturel (termes en pk ), appeleereponse transitoire si |pk | < 1 ∀k .
une reponse en regime force (termes en qk ).50/ 68
Signaux et Systemes Discrets
Systemes discrets
Analyse des systemes discrets par la transformee en Z
4.3 Analyse des SLD par la transformee en Z (3/3)
Condition de stabilite :
∞∑n=−∞
|h(n)| < ∞
Un SLI causal est stable si et seulement si tous les poles de safonction de transfert sont a l’interieur, strictement, du cercleunite.
51/ 68
Signaux et Systemes Discrets
Systemes discrets
Representation frequentielle des systemes discrets
4.4 Representation frequentielle des SLD (1/2)
Soit l’entree e(n) = e jnωT = e jnΩ pour −∞ < n < +∞ d’un SLIde reponse impulsionnelle h(k). La sortie peut alors s’ecrire :
s(n) =∞∑
k=−∞h(k)e j (n−k)Ω = e jnΩ
∞∑k=−∞
h(k)e−jkΩ
H (e jΩ) =∞∑
k=−∞h(k)e−jkΩ
H (e jΩ) est appele reponse frequentielle du systeme. On etudie sonmodule et sa phase :
H (e jΩ) = |H (e jΩ)|e jarg[H (ejΩ)]
52/ 68

Signaux et Systemes Discrets
Systemes discrets
Representation frequentielle des systemes discrets
4.4 Representation frequentielle des SLD (2/2)
Exemple :
H (z ) =1
1 + 0.5z−1
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real part
Imag
inar
y pa
rt
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
Normalized frequency (Nyquist == 1)
Pha
se (
degr
ees)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
Normalized frequency (Nyquist == 1)
Mag
nitu
de R
espo
nse
(dB
)
53/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
5. Echantillonnage et reconstruction des signaux
1 Historique du Theoreme d’echantillonnage
2 Echantillonnage ideal
3 Theoreme d’echantillonnage de Shannon
4 Reconstruction du signal continu a partir de ses echantillons
5 Exemple pratique d’echantillonnage
6 Reconstruction reelle du signal continu
54/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Historique du Theoreme d’echantillonnage
5.1 Historique du Theoreme d’echantillonnage (1/3)
De tout temps, l’Homme a cherche a echantillonner ... 1
1918 E.T. Whittaker s’interesse aux representations analytiquesd’une fonction connue seulement pour des valeursequidistantes : a, a + w , a + 2w , ...a + nwCeci l’a conduit a la forme finale de la serie cardinale :
∞∑n=−∞
f (a + nw)sin
(πw (t − a − nw)
)πw (t − a − nw)
1928 Nyquist s’interesse a la communication telegraphique. Lavitesse d’echantillonnage de Nyquist correspond a la vitesseminimale pour laquelle on peut obtenir une reconstructionstable.
1Merci a Simon Mathieu de l’Universite Laval pour cet historique precis55/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Historique du Theoreme d’echantillonnage
5.1 Historique du Theoreme d’echantillonnage (2/3)
1933 Kotel’nikov a introduit ce theoreme dans la litteraturescientifique russe.
1948 Shannon enonce un theoreme qui selon lui est generalementadmis dans le domaine des communications :Whittaker Kotel’nikov Shannon — WKS
Si une fonction f (t) ne contient pas de frequences
superieures a ωmax en radians par seconde, alors elle
est completement determinee par l’ordonnee d’une
serie de points espaces de T = πωmax
secondes.
Ce theoreme prend sa source dans les travaux de Borel,Cauchy et De La Vallee Poussin au milieu du XIXe siecle.
56/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Historique du Theoreme d’echantillonnage
5.1 Historique : reconstruction (3/3)
Classe de fonctions de Paley-Wiener (largeur de bande limitee)regroupe les fonctions telles que :
PWB ={f ∈ L2(R) : supp f ⊆ [−σ, σ]
},
ou f est la transformee de Fourier definie dans L1(R), i.e. ladefinition usuelle de la transformee et supp f est le plus petitsupport de f . Le theoreme nous conduit a la serie cardinale utiliseepour reconstruire la fonction originale :
f (t) =∑n∈Z
f( nw
)sinc
(t − n
w
)(33)
57/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Echantillonnage ideal
5.2 Echantillonnage ideal (1/2)
Soit un signal analogique xa(t) defini par sa TF :
xa(t) =12π
∫ ∞
−∞Xa(jω)e jωtdω (34)
L’echantillonnage de xa(t) est defini par x (n) = xa(t)|t=nT
Le signal discret x (n) est defini par :
x (n) =12π
∫ π
−πX (jΩ)e jΩndΩ (35)
C/D X
58/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Echantillonnage ideal
5.2 Echantillonnage ideal (2/2)
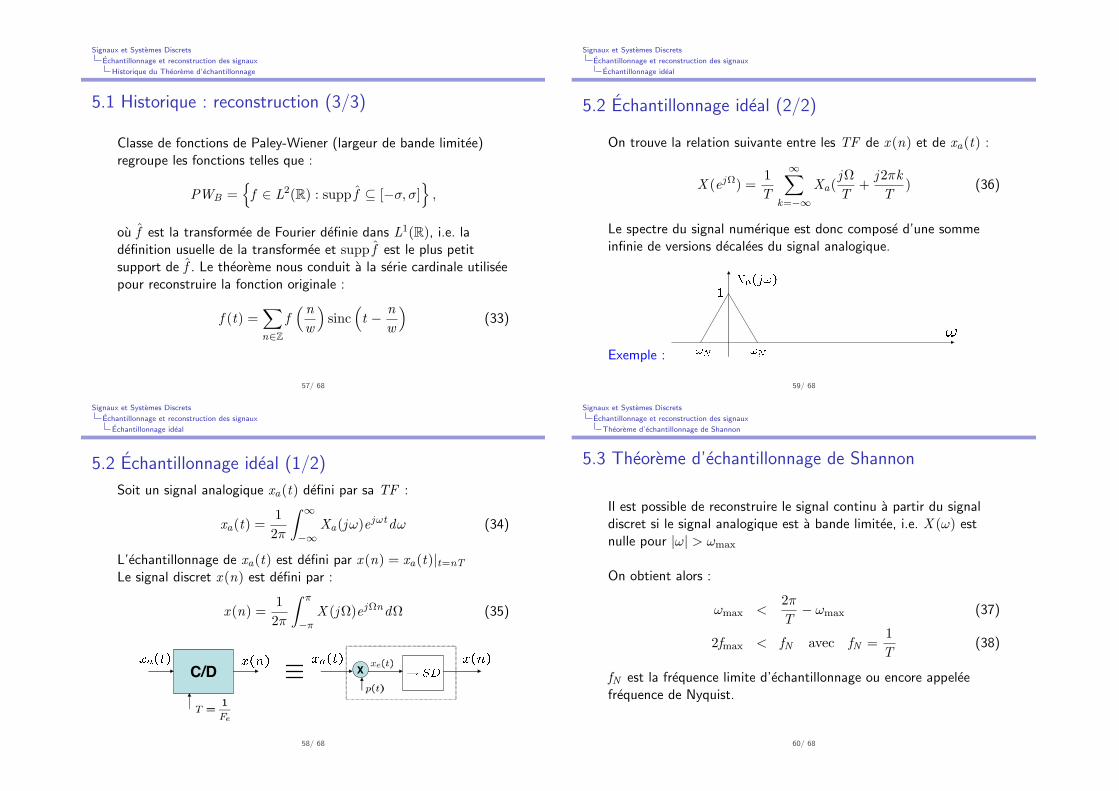
On trouve la relation suivante entre les TF de x (n) et de xa(t) :
X (e jΩ) =1T
∞∑k=−∞
Xa(jΩT
+j2πkT
) (36)
Le spectre du signal numerique est donc compose d’une sommeinfinie de versions decalees du signal analogique.
Exemple :
59/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Theoreme d’echantillonnage de Shannon
5.3 Theoreme d’echantillonnage de Shannon
Il est possible de reconstruire le signal continu a partir du signaldiscret si le signal analogique est a bande limitee, i.e. X (ω) estnulle pour |ω| > ωmax
On obtient alors :
ωmax <2π
T− ωmax (37)
2fmax < fN avec fN =1T
(38)
fN est la frequence limite d’echantillonnage ou encore appeleefrequence de Nyquist.
60/ 68

Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Reconstruction du signal continu a partir de ses echantillons
5.4 Reconstruction du signal a partir de ses echantillons
Sous l’hypothese de Shannon precedente, et si le filtre Hr (jω) estun filtre passe-bas ideal de pulsation de coupure ωc = π/T , il estpossible de reconstruire le signal d’origine xa(t) de facon ideale.
xa(t) =∞∑
n=−∞x (n)hr (t − nT ) =
∞∑n=−∞
x (n)sin[π(t − nT )/T ]
π(t − nT )/T
61/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Exemple pratique d’echantillonnage
5.5 Exemple pratique d’echantillonnage
Soit un signal analogique xa(t) correspondant a une sinusoıde defrequence f = 2Hz et defini par :
xa(t) = sin(2π × 2t)
avec 0 ≤ t ≤ +5s.
La frequence de Nyquist correspond a fN = 2 × 2 = 4Hz.
62/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Exemple pratique d’echantillonnage
Sinusoıde de frequence 2Hz , fe = 1.6Hz
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Temps
Val
eur
du s
igna
l
Signal echantillone a 1.6Hz
63/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Exemple pratique d’echantillonnage
Sinusoıde de frequence 2Hz , fe = 3.2Hz
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Temps
Val
eur
du s
igna
l
Signal echantillone a 3.2Hz
64/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Exemple pratique d’echantillonnage
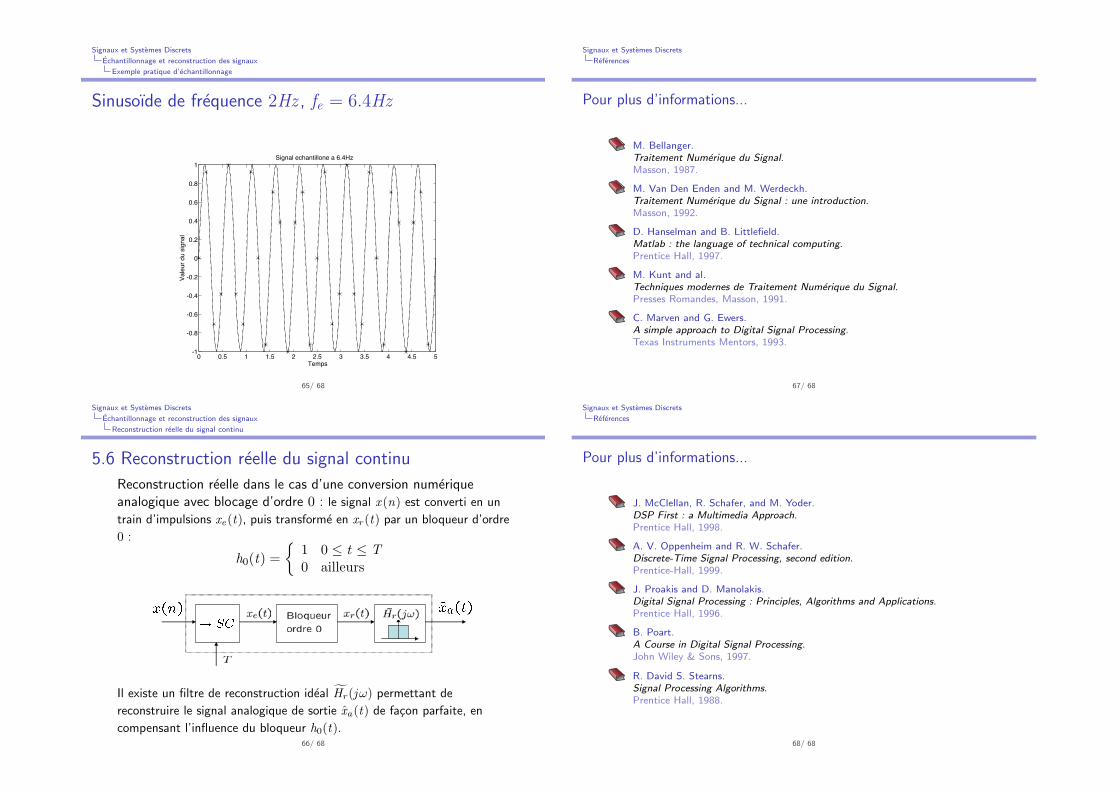
Sinusoıde de frequence 2Hz , fe = 6.4Hz
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Temps
Val
eur
du s
igna
l
Signal echantillone a 6.4Hz
65/ 68
Signaux et Systemes Discrets
Echantillonnage et reconstruction des signaux
Reconstruction reelle du signal continu
5.6 Reconstruction reelle du signal continu
Reconstruction reelle dans le cas d’une conversion numeriqueanalogique avec blocage d’ordre 0 : le signal x (n) est converti en un
train d’impulsions xe(t), puis transforme en xr (t) par un bloqueur d’ordre
0 :
h0(t) ={
1 0 ≤ t ≤ T0 ailleurs
Il existe un filtre de reconstruction ideal Hr (jω) permettant de
reconstruire le signal analogique de sortie xa(t) de facon parfaite, en
compensant l’influence du bloqueur h0(t).66/ 68
Signaux et Systemes Discrets
References
Pour plus d’informations...
M. Bellanger.Traitement Numerique du Signal.Masson, 1987.
M. Van Den Enden and M. Werdeckh.Traitement Numerique du Signal : une introduction.Masson, 1992.
D. Hanselman and B. Littlefield.Matlab : the language of technical computing.Prentice Hall, 1997.
M. Kunt and al.Techniques modernes de Traitement Numerique du Signal.Presses Romandes, Masson, 1991.
C. Marven and G. Ewers.A simple approach to Digital Signal Processing.Texas Instruments Mentors, 1993.
67/ 68
Signaux et Systemes Discrets
References
Pour plus d’informations...
J. McClellan, R. Schafer, and M. Yoder.DSP First : a Multimedia Approach.Prentice Hall, 1998.
A. V. Oppenheim and R. W. Schafer.Discrete-Time Signal Processing, second edition.Prentice-Hall, 1999.
J. Proakis and D. Manolakis.Digital Signal Processing : Principles, Algorithms and Applications.Prentice Hall, 1996.
B. Poart.A Course in Digital Signal Processing.John Wiley & Sons, 1997.
R. David S. Stearns.Signal Processing Algorithms.Prentice Hall, 1988.
68/ 68


















