CHAPTER 2helitavia.com · As an example, for pulsed radar the ... This conclusion is ... Kerr,15 is...
31
CHAPTER 2 PREDICTION OF RADAR RANGE Lamont V. Blake Electronics Consultant 2.1 INTRODUCTION The basic physics governing the prediction of radar maximum detection range, for a specified target under free-space conditions with detection limited by ther- mal noise, has been well understood since the earliest days of radar. The term free space implies (in the present context) that a spherical region of space, cen- tered at the radar and extending to considerably beyond the target, is empty ex- cept for the radar and the target. (Considerably as used here can be precisely de- fined for specific radars, but a general definition would be lengthy and not very useful.) It also implies that the only radar-frequency electromagnetic waves de- tectable within this region, other than those emanating from the radar itself, are from natural thermal and quasi-thermal noise sources, as described in Sec. 2.5. Although this condition is never fully realized, it is approximated for some ra- dar situations. Under many non-free-space conditions and with radically non- thermal forms of background noise, the prediction problem is considerably more complicated. Complications not considered in early analyses also result from modification of the signal and noise relationship by the receiving-system circuitry (signal processing). In this chapter the free-space equation will be presented, basic signal process- ing will be discussed, and some of the most important non-free-space environ- ments will be considered. The effect of some common nonthermal types of noise will be considered. Although it will not be feasible to consider all the possible types of radar situations, the methods to be described will indicate the general nature of the necessary procedures for environments and conditions not specifi- cally treated here. Some of the specialized types of radar, for which special anal- yses are required, are described in later chapters of this handbook. Definitions. The radar range equation contains many parameters of the radar system and its environment, and some of them have definitions that are interdependent. As will be discussed in Sec. 2.3, some definitions contain an element of arbitrariness, and it is common for different authors to employ different definitions of some of the range-equation factors. Of course, when
Transcript of CHAPTER 2helitavia.com · As an example, for pulsed radar the ... This conclusion is ... Kerr,15 is...

CHAPTER 2PREDICTION OF RADAR
RANGE
Lamont V. BlakeElectronics Consultant
2.1 INTRODUCTION
The basic physics governing the prediction of radar maximum detection range,for a specified target under free-space conditions with detection limited by ther-mal noise, has been well understood since the earliest days of radar. The termfree space implies (in the present context) that a spherical region of space, cen-tered at the radar and extending to considerably beyond the target, is empty ex-cept for the radar and the target. (Considerably as used here can be precisely de-fined for specific radars, but a general definition would be lengthy and not veryuseful.) It also implies that the only radar-frequency electromagnetic waves de-tectable within this region, other than those emanating from the radar itself, arefrom natural thermal and quasi-thermal noise sources, as described in Sec. 2.5.
Although this condition is never fully realized, it is approximated for some ra-dar situations. Under many non-free-space conditions and with radically non-thermal forms of background noise, the prediction problem is considerably morecomplicated. Complications not considered in early analyses also result frommodification of the signal and noise relationship by the receiving-system circuitry(signal processing).
In this chapter the free-space equation will be presented, basic signal process-ing will be discussed, and some of the most important non-free-space environ-ments will be considered. The effect of some common nonthermal types of noisewill be considered. Although it will not be feasible to consider all the possibletypes of radar situations, the methods to be described will indicate the generalnature of the necessary procedures for environments and conditions not specifi-cally treated here. Some of the specialized types of radar, for which special anal-yses are required, are described in later chapters of this handbook.
Definitions. The radar range equation contains many parameters of theradar system and its environment, and some of them have definitions that areinterdependent. As will be discussed in Sec. 2.3, some definitions contain anelement of arbitrariness, and it is common for different authors to employdifferent definitions of some of the range-equation factors. Of course, when

generally accepted definitions do exist, they should be observed. But evenmore important, although some arbitrariness may be permissible for individualdefinitions, once a particular definition has been adopted for one of the range-equation factors, it will be found that definition of one or more of the otherfactors is no longer arbitrary.
As an example, for pulsed radar the definitions of pulse power and pulselength are highly arbitrary individually, but once a definition for either one ofthem has been adopted, the definition of the other is determined by the constraintthat their product must equal the pulse energy. In this chapter, a set of definitionsthat are believed to conform to such rules of consistency, as well as to definitionsadopted by standards organizations, will be presented.
Conventions. Because of the wide variability of propagation-path and otherrange-equation factors, certain conventions are necessary for predicting rangeunder standard conditions when specific values of those factors are not known.A convention is a generally accepted standard assumption, which may neverbe encountered exactly in practice but which falls within the range of con-ditions that will be encountered, preferably somewhere near the middle of therange. An example is the conventional geophysical assumption, for calculatingcertain earth environment effects that depend on the earth's curvature, that theearth is a perfect sphere of radius 6370 km. The importance of conventions isthat they provide a common basis for comparison of competing radar systems.To the extent that they are fairly representative of typical conditions, they alsoallow prediction of a realistic detection range. Commonly accepted conventionswill be used in this chapter, and where needed conventions do not exist,appropriate ones will be suggested.
Range Prediction Philosophy. It is apparent from the foregoing discussionthat a range prediction based on conventional assumptions will not necessarilybe confirmed exactly by experimental results. This conclusion is furtherwarranted by the statistical nature of the "noise" which is usually the limitingfactor in the signal detection process. In other words, even if all the envi-ronmental factors were precisely known, a range prediction would not be likelyto be verified exactly by the result of a single experiment. A statisticalprediction refers to the average result of many trials. Therefore, radar rangeprediction is not an exact science. (In fact, the lesson of quantum mechanicsseems to be that there is no such thing as an exact science in the strict sense.)
Nevertheless, calculations to predict radar range are useful. However inexactthey may be on an absolute basis, they permit meaningful comparisons of the ex-pected relative performance of competing system designs, and they indicate therelative range performance change to be expected if the radar parameters or en-vironmental conditions are changed. They are therefore a powerful tool for thesystem designer. The predicted range is a figure of merit for a proposed radarsystem. It is not necessarily a complete one, since other factors such as target-position-measurement accuracy, data rate, reliability, serviceability, size,weight, and cost may also be important. Despite the inexactness of range predic-tions in the absolute sense, the error can be made small enough that the calcu-lated range is a good indication of the performance to be expected under averageenvironmental conditions. Section 2.10 is a more detailed discussion of predictionaccuracy.
Attempts to evaluate range prediction factors accurately, to better than per-haps 1 dB, are sometimes disparaged on the grounds that some factors are un-

likely to be known with accuracy in operational situations and that hence it isuseless to seek better accuracy for any factor. Although there is some basis forthis viewpoint, the overall accuracy will be unnecessarily degraded if the accu-racy of all the factors in the equation is deliberately reduced. Therefore it is rec-ommended that range predictions be based on as careful an evaluation of all thefactors as is possible. A goal of 0.1 dB accuracy is perhaps reasonable, althoughadmittedly it may be impossible to evaluate all the factors in the equation withthat degree of precision.
Historical Notes. Possibly the first comprehensive treatise on radarmaximum-range prediction was that of Omberg and Norton,1 published first asa U.S. Army Signal Corps report in 1943. It presents a fairly detailed rangeequation and contains information on evaluating some of the moreproblematical factors, such as multipath interference and minimum detectablesignal, within the limitations of the then-available knowledge. The signaldetection process was assumed to be based on visual observation of a cathode-ray-tube display. The antenna was assumed to "searchlight" the target.Statistical aspects of signal detection were not considered.
D. O. North,2 in a classical report published with a military security classifi-cation in 1943, outlined the basic theory of a statistical treatment of signal detec-tion. (This report was republished in Proceedings of the IEEE, but not until1963.) He introduced the concepts that are now called probability of detectionand false-alarm probability, and he clearly delineated the role of integration inthe detection of pulse signals. This report also introduced the concept of thematched filter, a contribution for which it had achieved some recognition prior to1963. But except for the matched-filter concept, its contributions to signal detec-tion theory were virtually unrecognized by radar engineers generally until the re-port was republished 20 years after its first appearance.
In a famous report3 first published in 1948 and republished in IRE Transac-tions on Information Theory in 1960, J. I. Marcum extensively developed the sta-tistical theory of detection with the aid of machine computation, referencingNorth's report. He computed probabilities of detection as a function of a rangeparameter related to signal-to-noise ratio, for various numbers of pulses inte-grated and for various values of a false-alarm parameter which he designatedfalse-alarm number. He employed this type of computation to study the effects ofvarious amounts and kinds of integration, different detector (demodulator) types,losses incurred by "collapsing" one spatial coordinate on the radar display, andvarious other effects. His results are presented as curves for probability of de-tection as a function of the ratio of the actual range to that at which the signal-to-noise ratio is unity, on the assumption that the received-signal power is in-versely proportional to the fourth power of the range. Since this proportionalityholds only for a target in free space, application of Marcum's results is sometimescomplicated by this mode of presentation.
Marcum considered only steady signals (target cross section not varying dur-ing the period of observation), and most of his results assume the use of a square-law detector. Robertson4 has published exceptionally detailed and useful steady-signal results applicable to the linear-rectifier detector, which is the type ofdetector almost universally used. (The square-law-detector results are also usefulbecause they differ very little from the linear-detector results.) Swerling extendedMarcum's work to include the case of fluctuating signals.5 His report was repub-lished in IRE Transactions on Information Theory in 1960. Fehlner6 recomputedMarcum's and Swerling's results and presented them in the more useful form of

curves with the signal-to-noise power ratio as the abscissa. The fluctuating-signalproblem has subsequently been further treated by Kaplan,7 Schwartz,8
Heidbreder and Mitchell,9 Bates,10 and others.Hall11 published in 1956 a comprehensive paper on radar range prediction in
which the concepts of probability of detection, false-alarm probability, the rela-tive effects of predetection and postdetection integration, and the effects of scan-ning the antenna beam were considered. The range equation was formulated interms of an ideal (matched-filter) utilization of the available received-signalpower, with loss factors to account for departures from the ideal.
Blake12 published an updating of the subject in 1961, applying recent advancesin system-noisc-tcmperature calculation, atmospheric absorption, plotting of cov-erage diagrams based on a realistic atmospheric refractive-index model, andmultipath-interference calculation. This work was followed by Naval ResearchLaboratory (NRL) reports13 and a book14 in which further details were pre-sented.
Contributions to the subject of range prediction have also been made by manyothers, far too numerous to mention by name. Only the major contributions canbe recognized in this brief history. Special mention should be made, however, ofthe many contributions in two volumes (13 and 24) of the MIT Radiation Labo-ratory Series, edited by Kerr15 and by Lawson and Uhlenbeck.16 Much use ismade in this chapter of results originally published in those volumes.
2.2 RANGEEQUATIONS
Radar Transmission Equation. The following equation, in the form given inKerr,15 is called the transmission equation for monostatic radar (one in whichthe transmitter and receiver are colocated):
P1. G1G^K2F2F2
-P, = (4^)3*4 W
where Pr = received-signal power (at antenna terminals)Pt = transmitted-signal power (at antenna terminals)Gt = transmitting-antenna power gainGr = receiving-antenna power gaina = radar target cross sectionX = wavelength
Ff = pattern propagation factor for transmitting-antenna-to-target pathFr = pattern propagation factor for target-to-receiving-antenna pathR - radar-to-target distance (range)
This equation is not identical to Kerr's; he assumes that the same antenna isused for transmission and reception, so that GfGr becomes G2 and Ft
2Fr2 be-
comes F4. The only factors in the equation that require explanation are the pat-tern propagation factors F1 and F1.. The factor Ft is defined as the ratio, at thetarget position, of the field strength E to that which would exist at the same dis-tance from the radar in free space and in the antenna beam maximum-gain direc-tion, E0. The factor F1. is analogously defined. These factors account for the pos-sibility that the target is not in the beam maxima (G, and Gr are the gains in the

maxima) and for any propagation gain or loss that would not occur in free space.The most common of these effects are absorption, diffraction and shadowing,certain types of refraction effects, and multipath interference.
For a target in free space and in the maxima of both the transmit and receiveantenna patterns, Ft = Fr = 1. Detailed definitions of these and other range-equation factors are given in Sees. 2.3 to 2.7.
Maximum-Range Equation. Equation (2.1) is not a range equation as itstands, although it can be rewritten in the form
\w*wrL (47T)3 Pr \
This equation states that R is the range at which the received-echo power will bePr if the transmitted power is Pt, target size a, and so forth. It becomes amaximum-range equation by the simple expedient of attaching subscripts to Prand R so that they become Pr>min and /?max- That is, when the value of Pr in Eq.(2.2) is the minimum detectable value, the corresponding range is the maximumrange of the radar.
However, this is a very rudimentary maximum-range equation, of limited use-fulness. A first step toward a more useful equation is replacement of Pr by a morereadily evaluated expression. This is done by first defining the signal-to-noisepower ratio:
SIN = P1IPn (2.3)
where Pn is the power level of the noise in the receiving system, which deter-mines the minimum value of Pr that can be detected. This noise power, in turn,can be expressed in terms of a receiving-system noise temperature Ts\
Pn = kTsBn (2.4)
where k is Boltzmann's constant (1.38 x 10~23 Ws/K) and Bn is the noise band-width of the receiver predetection filter, hertz. (These quantities are definedmore completely in Sees. 2.3 and 2.5.17) Therefore,
Pr = (SIN) KT8Bn (2.5)
This expression can now be substituted for Pr in Eq. (2.2).A further convenient modification is to redefine Pt as the transmitter power at
the terminals of the transmitter, rather than [as in Eq. (2.1)] the usually somewhatsmaller power that is actually delivered to the antenna terminals because of lossin the transmission line. This redefinition is desirable because when radar systemdesigners or manufacturers specify a transmitter power, the actual transmitteroutput power is usually meant.
With this changed definition, Pt must be replaced by /VL,, where Lt is a lossfactor defined as the ratio of the transmitter output power to the power actuallydelivered to the antenna. (Therefore, Lt ^ 1.)
It will later prove convenient to introduce additional loss factors similarly re-lated to other factors in the range equation. These loss factors are multiplicative;

that is, if there are, for example, three loss factors L1, L2, and L3, they can berepresented by a single system loss factor L = L7L2L3. The resulting maximum-range equation is
. r pfifirfFW r*max [(410'(5/AOn^WJ u>6;
The quantities (S/N)min and J5 as here defined are to be evaluated at theantenna terminals, and that fact detracts from the utility of this form of theequation. As thus defined, (S/N)min is not independent of Bn, and the depen-dence is difficult to take into account in this formulation. If that dependencewere ignored, this equation would imply that /?max is an inverse function ofBn, i.e., if all the other range-equation factors were held constant, RmSLX couldbe made as large as desired simply by making Bn sufficiently small. This iswell known to be untrue. To remedy this difficulty, several factors must beconsidered. It is convenient to do this in terms of a particular transmittedwaveform.
Pulse Radar Equation. Equation (2.6) does not specify the nature of thetransmitted signal; it can be CW (continuous-wave), amplitude- orfrequency-modulated, or pulsed. It is advantageous to modify this equationfor the specific case of pulse radars and in so doing to remove the"bandwidth" difficulty encountered in using Eq. (2.6). Pulse radars are ofcourse the most common type. As will be shown, although the equationthus modified will ostensibly be restricted to pulse radars, it can in fact beapplied to other types of radar by appropriate reinterpretation of certainparameters.
D. O. North2 demonstrated that the detectable signal-to-noise ratio (SlA0min will have its smallest possible value when the receiver bandwidth Bn hasa particular (optimum) value and that this optimum value of Bn is inverselyproportional to the pulse length T. This implies that an equation can be writtenwith pulse length in the numerator rather than with bandwidth in the denom-inator. North also showed that signal detectability is improved by integratingsuccessive signal and noise samples in the receiver and that the detectability isa function of the total integrated signal energy. (The integration process is dis-cussed in Sec. 2.4.) Finally, he showed that when the receiver filter ismatched to the pulse waveform, the ratio of the received-pulse energy to thenoise power spectral density at the output of the receiver filter is maximizedand is equal to the signal-to-noise power ratio at the antenna terminals. Theterm matched in this context means, partially, that the filter bandwidth is op-timum. The full meaning is that the filter transfer function is equal to the com-plex conjugate of the pulse spectrum.
Detectability Factor. An equation based on these facts can be derived byutilizing a parameter called detectability factor, defined by the Institute ofElectrical and Electronics Engineers (IEEE)18 as follows: 44In pulsed radar, theratio of single-pulse signal energy to noise power per unit bandwidth thatprovides stated probabilities of detection and false alarm, measured in theintermediate-frequency amplifier and using an intermediate-frequency filtermatched to the single pulse, followed by optimum video integration." Deferring

for the moment discussion of the meaning of some aspects of this definition, itcan be expressed mathematically as follows:*
D0 = EJN* = PtT/kTs (2.7)
where D0 is the detectability factor, Er is the received-pulse energy, and N0 is thenoise power per unit bandwidth, both measured at the output of the receiver filter(i.e., at the demodulator input terminals).
The next step in this reformulation of the range equation is to define a band-width correction factor CB, to allow for the possibility that the receiver filterbandwidth Bn may not be optimum. This factor is defined by the followingrelationship:
(5/AOmuA. = tf/AOminCoA, optQ = AA., optQ (2.8)
where Bn^opt is the optimum value of Bn. The factor CB has been named the band-width correction factor because it was originally defined in terms of bandwidth op-timization, but in actuality it is a filter mismatch factor, in the North matched-filtersense. As Eq. (2.8) implies, CB^\. Evaluation of CB is discussed in Sec. 2.3.
The quantity (S/N)min(0) in Eq. (2.8) is the optimum-bandwidth (matched-filter)value of (S/N)min, which North showed to be equal to D0. It is this fact that al-lows the range equation to be written, as desired, in terms of the signal-to-noiseratio at the detector input terminals (filter output) rather than the ratio at the an-tenna terminals.
North deduced that Bnopi = I/T exactly. As will be discussed later, some ra-dar detection experiments with human observers have subsequently suggestedthat the constant of proportionality may not be exactly unity. However, North'sanalysis is theoretically correct for pulses of rectangular shape and for the defi-nition to be given in Sec. 2.3 for the noise bandwidth Bn. For pulses of othershapes the pulse-length-bandwidth relationship is subject to the particular defi-nition used for the pulse length. That definition is not an issue, of course, whenthe pulse shape is rectangular.
Based on that result, the range equation can be written with pulse length in thenumerator by means of the following equivalence, in terms of the parameters ofEq. (2.8):
(SIN)n^nBn = AAA (2.9)
The expression of the left-hand side of Eq. (2.9), where it occurs in the denomi-nator of Eq. (2.6), can now be replaced by the expression of the right-hand side.The result is the desired pulse radar form of the range equation:
IP/rGfiptfFfF*}™D = _£ i L i L_ n 1 (YlR™ [ (4^kT1D0C8L \ (2'10)
*In some of the literature it is stated that the matched-filter output signal-to-noise ratio is 2EJN0.That statement is based on defining peak signal power as the instantaneous value occurring not only atthe peak of the output-pulse waveform but also at the peak of an RF cycle, where the instantaneouspower is theoretically twice the average power. North's definition, based on the signal power averagedover an RF cycle, is consistent with the definition of noise power as the average over both the RF cyclesand the random noise fluctuations.

A primary advantage of this formulation of the equation is that standardcurves for the parameter D0, as a function of the number of pulses integrated, areavailable, with the probabilities of detection and false alarm as parameters (Sec.2.4). Calculation of these curves is necessarily done in terms of D0, the signal-to-noise ratio at the demodulator input terminals.
The emphasis of this equation on the significance of the pulse energy (theproduct PtT in the numerator) is valuable to the system designer. It also providesa simple answer to the question of which pulse length to use in the range equationwhen the radar employs pulse compression, in which a coded pulse waveform ofrelatively long duration is transmitted and then "compressed" to a short pulseupon reception. The correct answer is deduced from the fact that the product P,Tmust equal the transmitted pulse energy. Therefore if the pulse power Pt is thepower of the long (uncompressed) transmitted pulse, then T must be the durationof that pulse.
A further advantage of this form of the equation, or more specifically of thedefinition of the detectability factor, is the indicated dependence of the radar de-tection range on the integration of successive pulses, if any, that takes place inthe receiving system. Integration is discussed in Sec. 2.4.
Finally, as was mentioned earlier, this formulation of the range equation, al-though derived specifically in terms of pulse radar parameters, can be applied to CWradars and to radars that utilize forms of signal modulation other than pulses. Its ap-plication to these other radar types is accomplished by redefining the parameters Tand D0. Details of this procedure are presented in Ref. 14, Chaps. 2 and 9.
Probabilistic Notation. It has been mentioned (Sec. 2.1) that the radarsignal detection process is basically probabilistic or statistical in nature. Thisresults from the nature of the noise voltage that is always present in thereceiver circuits. This voltage is randomly varying or fluctuating, and when it isintermixed with a radar echo signal, it becomes impossible to tell with certaintywhether a momentary increase of the receiver output is due to a signal or to achance noise fluctuation. However, it is possible to define probabilities forthese two possibilities and to discuss the detection process in terms of them ina quantitative manner. The probability that the signal, when present, will bedetected is called the probability of detection, Pd, and the probability that anoise fluctuation will be mistaken for a signal is called the false-alarmprobability, Pfa.
The notations /?max, Pr,min> and (S/N)min can then be replaced by more precisenotation, using subscripts to denote the applicable values of Pd and Pfa. How-ever, the/a subscript is ordinarily suppressed, though implied. Thus R5Q can de-note the range for 0.5 (i.e., 50 percent) probability of detection and some sepa-rately specified false-alarm probability.
If the target cross section a fluctuates, this fluctuation will alter the signal-plus-noise statistics. As mentioned in Sec. 2.1, this problem has been analyzed bySwerling5 and others.6"10 Curves have been calculated that allow determining theappropriate value OfD0 for the fluctuating-signal case, for various probabilities ofdetection and false alarm (Sec. 2.4).
Automatic Detection. Detection* is said to be automatic if the decisionconcerning the presence or absence of a received signal is made by a purely
*A note on various meanings of the words detect, detector, and detection is desirable here. In radiousage, a detector has come to mean either a frequency converter (e.g., a superheterodyne first detector)or a demodulator (often the "second detector" of a superheterodyne receiver, which is usually a linearrectifier). Then, detection means the waveform modification produced by such a device. An automatic

physical device, without direct human intervention. Such a device, describedby North,2 establishes a threshold voltage level (for example, by means of abiased diode). If the processed (e.g., integrated) receiver output exceeds thethreshold (as evidenced by diode current flow), some mechanism is actuated toindicate this fact in an unequivocal fashion. The mechanism could be thelighting of a light, the ringing of a bell, or more generally the setting of a bit to1 in a binary data channel wherein a O corresponds to no signal. Variousadditional consequences may then automatically ensue. The analysis of radardetection can thus be regarded as a problem in statistical decision theory.
Bistatic Radar Equation. The foregoing equations assume that thetransmitting and receiving antennas are at the same location (monostatic radar).A bistatic radar (Chap. 25) is one for which the two antennas are widelyseparated, so that the distance and/or the direction from the transmittingantenna to the target are not necessarily the same as the distance and/ordirection from the receiving antenna to the target. Moreover, since the signalreflected from the target to the receiving antenna is not directly backscattered,as it is for monostatic radar, the target cross section is not usually the same(for a given target viewed in a given aspect by the transmitting antenna). Abistatic radar cross section ab is defined to apply for this situation. The symbola in the preceding equations implies a monostatic cross section. Rangeequations for bistatic radar are obtained from the foregoing monostaticequations by replacing the range R and the target cross section a by thecorresponding bistatic quantities. The bistatic equivalent of R is\/RtRn whereRt is the distance from the transmitting antenna to the target and Rr is thedistance from the target to the receiving antenna.
Equations in Practical Units. The equations that have been given are validwhen a consistent system of units is used, such as the rationalized meter-kilogram-second (mks) system. In many applications, however, it is convenientor necessary to employ "mixed" units. Moreover, it is usually moreconvenient to express the wavelength X in terms of the equivalent frequency inmegahertz. It is also desirable to combine all the numerical factors and thevarious unit-conversion factors into a single numerical constant. For aparticular system of mixed units, the following equation is obtained from Eq.(2.10):
P - 1?0 ?[/>/(kW)TM<sfi^r^/2^r211/4
r? -n
*--129'2[ /MHz2W,L J (2J1)
The subscript notation Rm&x is now meant to imply the range corresponding tospecified detection and false-alarm probabilities. For this equation, the range isgiven in international nautical miles. (One international nautical mile is exactly1852 m.) The target cross section a is in square meters, transmitter power Pt inkilowatts, pulse length T in microseconds, frequency/in megahertz, and systemnoise temperature T5 in kelvins. (All other quantities are dimensionless.)
If the range is desired in units other than nautical miles (all other units remain-ing the same), in place of the factor 129.2 the following numerical constantsshould be used in Eq. (2.11):
detector, however, is a decision-making device—for example, a device that replaces the human observerof a cathode-ray-tube display—and in that context detection is the making of a positive decision. In thischapter the meaning will ordinarily be evident from the context. Where confusion might otherwise re-sult, the term detection-decision device may be used to denote an automatic detector.

Range units
Statute milesKilometersThousands of yardsThousands of feet
Constant, Eq. (2.11)
148.7239.3261.7785.0
A decibel-logarithmic form of the range equation is sometimes useful. Anequation of that type, corresponding to Eq. (2.11), is readily obtained as the al-gebraic sum of the logarithms of the terms of that equation (with appropriate mul-tipliers for the decibel format and for exponents), since it involves only multipli-cation, division, and exponentiation.
2.3 DEFINITION AND EVALUATION OF RANGEFACTORS
There is an element of arbitrariness in the definition of most of the factors ofthe radar range equation, and for some of them more than one definition is incommon use. Since the definitions in these cases are arbitrary, one definitionis in principle as good as another. However, once a definition has been chosenfor one factor, there is no longer freedom of choice for one or more of theothers. The factors are interdependent, and mutual compatibility is essential.A set of definitions that are believed to be mutually compatible will be givenhere. Also, information needed for evaluating these factors will be given in-sofar as is practicable. Certain range-equation factors that present specialproblems will be considered at greater length in subsequent sections of thechapter.
Transmitter Power and Pulse Length. The radar transmission equation,from which all the subsequent range equations are derived, is an equation forthe dimensionless ratio Pt/Pr. Consequently, the most basic requirement on thedefinition of Pt is that it agree with the definition of Pr. For a CW radar, thepower (averaged over an RF cycle) is constant, and there is no definitionproblem. For a pulse radar, both Pt and Pr are usually defined as the pulsepower, which is the average power during the pulse. More precisely,
-T 12
Pt = \fw(t)dt (2.12)
where W(t) is the instantaneous power (a function of time, t). The definition ofW(O, however, excludes "spikes," "tails," and any other transients that are notuseful for radar detection. The time interval T is the pulse period (= 1/PRF, wherePRF is the pulse repetition frequency in pulses per second). Because of the ex-clusion of nonuseful portions of the waveform (as it exists at the transmitter out-put terminals), Pt as thus defined may be called the effective pulse power. It isoften referred to as the peak power. However, peak power more properly signi-fies the power level at the peak of the pulse waveform (averaged over an RFcycle), and pulse power is more appropriate.

In the transmission equation, Eq. (2.1), Pt and Pr are the transmitted and re-ceived powers at the antenna terminals. As was mentioned in Sec. 2.2, Pt is nowdefined at the transmitter output terminals, and any loss between these terminalsand the antenna input terminals must be expressed as a loss factor Lt.
The pulse power P1 and the pulse length T must be defined so that their prod-uct is the pulse energy. Any definition of T will produce this result if the samedefinition is used in Eq. (2.12). The customary definition, and the one recom-mended here, is the time duration between the half-power points of the envelopeof the RF pulse (0.707-V points). For some purposes, such as analyzing the rangeresolution or accuracy, this arbitrary definition of the pulse length is not permis-sible. But the half-power definition is customary and acceptable for use in therange equation.
The range equation can be written with the product P/r replaced by the pulseenergy Ef. The more detailed notation is used here because, for ordinary pulseradars, Pt and T are usually given explicitly and Et is not. However, the use of E1in the equation does have the advantage of avoiding the problems of defining P1and T, and it is especially useful when complicated waveforms are transmitted.
If coherent integration for a fixed integration time is assumed, the equationcan also be written with the transmitted average power in the numerator. Forsimple pulse radars, the average power is the product of pulse power, pulselength, and pulse repetition frequency. In this average-power formulation, the av-erage power Pt is multiplied by the integration time tf (assumed to be long com-pared with the interpulse period) to obtain the transmitted energy. Then the valueof D0 used is that which would apply if detection were based on observation of asingle pulse. (See Sec. 2.4, Fig. 2.3.) The average-power formulation is especiallyuseful for CW or pulse doppler radars.
Antenna Gain, Efficiency, and Loss Factor. The gains Gt and Gr are definedas the power gains of the antennas in the maximum-gain direction. If a targetof interest is at an elevation angle not in the beam maxima, that fact isaccounted for by the pattern propagation factors Ft and Fr, discussed in Sec.2.6. The maximum power gain of an antenna is equal to its directivity(maximum directive gain) multiplied by its radiation efficiency.19 Thedirectivity D is defined in terms of the electric-field-strength pattern £(6,4>) bythe expression
D = 2, , 4^""" (2.13)
J j£2(6,<|>) sin 6 d9 d$o o
where 6 and <t> are the angles of a spherical-coordinate system whose origin is atthe antenna and £max is the value of £(0,4>) in the maximum-gain direction.
The radiation efficiency of the transmitting antenna is the ratio of the powerinput at the antenna terminals to the power actually radiated (including minor-lobe radiation). In terms of the receiving antenna, the equivalent quantity is theratio of the total signal power extracted from the incident field by the antenna,with a matched-load impedance, to the signal power actually delivered to amatched load. The reciprocal of the radiation efficiency is the antenna loss factorL,,, which plays a part in the calculation of antenna noise temperature (Sec. 2.5).
Measured antenna gains are usually power gains, whereas gains calculated

from pattern measurements or theory are directive gains. If the antenna gain fig-ures supplied for use in the range equations of this chapter are of the latter type,they must be converted to power gains by dividing them by the appropriate lossfactor. For many simple antennas the ohmic losses are negligible, and in thosecases the power gain and the directive gain are virtually equal. However, this isby no means a safe assumption in the absence of specific knowledge. Array an-tennas in particular are likely to have significant ohmic losses in waveguides orcoaxial lines used to distribute the power among the radiating elements.
If separate transmitting and receiving antennas are used and if their maximumgains occur at different elevation angles (this is a possible though not a commonsituation), appropriate correction can be made by means of the pattern factors/,(8) and/r(6), contained in the pattern propagation factors Ft and Fr (Sec. 2.6).
Antenna Beamwidth. This property of the antenna does not appearexplicitly in the range equations, but it affects the range calculation through itseffect on the number of pulses integrated when the antenna scans. Theconventional definition is the angular width of the beam between the half-power points of the pattern. Pattern is used here in the usual antenna sense,for one-way transmission. It is not the two-way pattern of the radar echo signalfrom a stationary target as the antenna scans past it.
If a radar target, as viewed from the radar antenna, has an angular dimensionthat is appreciable compared with the beamwidth, the target cross section be-comes a function of the beamwidth (see Sec. 2.8). For computing an effectivevalue of a in this case, in principle a special definition of beamwidth is needed(Ref. 15, p. 483). For practical work, however, the error that results from usingthe half-power beamwidth in this application is usually acceptable.
Target Cross Section. The definition of radar target cross section thatapplies for use in the foregoing radar range equations is given in Chap. 11, andthe reader is referred to that chapter for a detailed discussion of the subject.Here mention will be made of a few aspects of the definitions that are ofparticular significance to the range prediction problem.
Targets can be classified as either point targets or distributed targets. A pointtarget is one for which (1) the maximum transverse separation of significant scat-tering elements is small compared with the length of the arc intercepted by theantenna beam at the target range and (2) the maximum radial separation of scat-tering elements is small compared with the range extent of the pulse. At distanceR from the antenna, the transverse dimension of the antenna beam is R times theangular beamwidth in radians. The range extent of the pulse is cr/2, where c is thespeed of wave propagation in free space, 3 x 105 km/s, and T is the pulse durationin seconds. Most of the targets for which range prediction is ordinarily of interestare point targets, e.g., aircraft at appreciable distances from the radar.
However, range predictions for distributed targets are sometimes wanted.The moon, for example, is a distributed target if the radar beamwidth is com-parable to or less than 0.5° or if the pulse length is less than about 11.6 ms. Arainstorm is another example of a distributed target. Often, distributed targetsare of interest because echoes from them (called radar clutter) tend to maskthe echoes from the point targets whose detection is desired (see Sec. 2.8).Echoes from rain may be regarded as clutter when they interfere with detec-tion of aircraft or other point targets, but they are themselves the signals ofprime interest for weather radar.

The radar range equation is derived initially for a point target, and whenthat equation or the subsequent equations derived from it are used to predictthe detection range for distributed targets, complications arise. In many cases,however, the point-target equation can be used for distributed targets by em-ploying a suitable "effective" value of a (Sec. 2.8).
The cross section of any nonspherical target is a function of the aspect anglefrom which it is viewed by the radar. It may also be a function of the polarizationof the radar electromagnetic field. Therefore, in order to be wholly meaningful, aradar range prediction for a specific target, such as an aircraft, must stipulate thetarget aspect angle assumed and the polarization employed. Ordinarily, the noseaspect of an aircraft (approaching target) is of principal interest. The commonlyused polarizations are horizontal, vertical, and circular. Tabulations of radarcross-section measurements of aircraft sometimes give nose, tail, and broadsidevalues.
If the values are obtained from dynamic (moving-target) measurements,they are usually time averages of fluctuating values; otherwise they are staticvalues for a particular aspect. Since the instantaneous cross section of a targetis a function of the aspect angle, targets that are in motion involving randomchanges of aspect have cross sections that fluctuate randomly with time, aswas mentioned in Sec. 2.2. This fluctuation must be taken into account in thecalculation of probability of detection, as will be discussed in Sec. 2.4. Whena fluctuates, the value to be used in the range equation as formulated here isthe time average.
Because of the wide variation of cross-section values of real targets, the rangeperformance of a radar system is often stated for a particular target-cross-sectionassumption. A favorite value for many applications is 1 m2. This represents theapproximate cross section of a small aircraft, nose aspect, although the range fordifferent "small" aircraft may be from less than 0.1 m2 to more than 10 m2. Ra-dars are often performance-tested by using a metallic sphere, sometimes carriedaloft by a free balloon, as the target because the cross section of a sphere can beaccurately calculated and it does not vary with the aspect angle or the polariza-tion.
A special definition problem arises when the target is large enough to benonuniformly illuminated by the radar. A ship, for example, may be tallenough so that the pattern propagation factor F has different values from thewaterline to the top of the mast. This matter is discussed in Ref. 15, p. 472 ff.
Wavelength (Frequency). There is ordinarily no problem in definition orevaluation (measurement) of the frequency to be used in the radar rangeequation. However, some radars may use a very large transmission bandwidth,or they may change frequency on a pulse-to-pulse basis, so that a question canexist as to the frequency value to be used for predicting range. Also, thepresence of/(or X) in the range equations makes it clear that the range can befrequency-dependent, but the exact nature of the frequency dependence is notalways obvious because other factors in the range equation are sometimesimplicitly frequency-dependent. Therefore an analysis of how the rangedepends on frequency can be rather complicated, and the answer dependspartly on what factors are regarded as frequency-dependent and which ones areheld constant as the frequency is changed. For example, most antennas havegain that is strongly frequency-dependent, but some antenna types are virtuallyfrequency-independent over a fairly wide frequency band.

Bandwidth and Matching Factors. The frequency-response width (band-width) of the receiver selective circuits appears explicitly in Eqs. (2.4) to (2.6),but it is an implicit factor in the other range equations as well, through thefactor CB. From Eq. (2.4) it is clear that Bn directly affects the noise level inthe receiver output. In general it also affects the signal, but not necessarily inthe same manner as the noise is affected, because the signal spectrum is notusually uniform. There is a value of Bn that optimizes the output signal-to-noiseratio, as indicated by Eq. (2.8), and this optimum bandwidth is inverselyproportional to the pulse length T. (This statement applies to pulse compressionradars as well as to others if T is, in this context, the compressed pulse length,since it is the compressed pulse that is amplified in the receiver. However, ashas been emphasized in Sec. 2.2, in the numerator of the range equation theuncompressed pulse length must be used along with the actual radiated pulsepower, P1.)
Since the range equation (2.6) and those subsequently derived from it incor-porate the assumption of Eq. (2.4) (namely, that the noise output power of thereceiver is equal to /CT^nG0), the definition of Bn—the noise bandwidth—mustconform to that assumption. The resulting correct definition, due to North,20 is
X
B» = (k!G(fW <2-14)
where G0 is the gain at the nominal radar frequency and G(/) is thefrequency-power gain characteristic of the receiver predetection circuits, fromantenna to detector.
The definition specifies G(/) to be the response characteristic of thepredetection circuits only. That is because for maximum postdetection signal-to-noise ratio the video bandwidth should be equal to at least half of thepredetection bandwidth; and if it is of this width or wider, its exact width haslittle or no effect on signal detectability (Ref. 16, p. 211 ff.).
It is common practice to describe receiver bandwidth as the value betweenhalf-power points of the frequency-response curve. Fortunately, this value is usu-ally very close to the true noise bandwidth, although the exact relationship of thetwo bandwidths depends on the particular shape of the frequency-response curve(Ref. 16, p. 177).
The bandwidth correction factor C3 in Eqs. (2.10) and (2.11) accounts for thefact that if Bn is not the optimum value, a value of signal-to-noise ratio larger thanthe optimum-bandwidth value D0 is required. Therefore CB ^ 1. From data ob-tained in signal detection experiments during World War II at the Naval ResearchLaboratory, Haeff21 devised the following empirical expression:
c"£['*£rwhere Bn is the noise bandwidth, T is the pulse length, and a is the product of Tand Bn>opl (optimum bandwidth). Figure 2.1 is a plot of Haeff s equation.
Actually, Haeff deduced from his experiments, as did North from theoreticalanalysis, that Bnj0pl = I/T; that is, a = 1, for rectangular-shaped pulses. How-

B/B0ptFIG. 2.1 Bandwidth correction factor CB as a function of bandwidth Bn relative to op-timum bandwidth £opt; plotted from Haeffs empirical formula, Eq. (2.15).
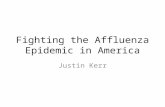
ever, on the basis of experiments at the Massachusetts Institute of Technology(MIT) Radiation Laboratory conducted somewhat later (also with rectangularpulses), it was concluded (Ref. 16, p. 202) that a = 1.2 for detection of signals byvisual observation of cathode-ray-tube displays. Figure 2.2 is a plot of the Radi-ation Laboratory experimental results. The value 1.2 has subsequently beenwidely used for determining #n,opt
m radar design and for computing CB in radarrange prediction.11'12 However, North* has suggested that the a = 1.2 figuremay be based on a misinterpretation of the Radiation Laboratory data. Also, ithas been notedt that the number of actual data points in Fig. 2.2 may be too fewon which to base a good estimate of the optimum. Consequently, it is possiblethat the value of a for human observation of visual displays is much closer to 1than was deduced by Lawson and Uhlenbeck. Fortunately, the minima of thecurves (Fig. 2.2) are very broad and flat, and therefore the exact value of a doesnot make much difference for the usual range of values of .BnT.
The interpretation of CB as a factor that accounts only for nonoptimum widthof the predetection filter is permissible for simple pulse shapes and approximateresults, but in principle it must also account for the complete amplitude-phasecharacteristic of the filter: its departure from a matched-filter characteristic. The
*In a private communication to the author in 1963.tBy M. I. Skolnik, editor of this handbook, in his review of this chapter.
C8
(DEC
IBEL
S)

FIG. 2.2 Experimental results showing the effect ofbandwidth (parameter BT) on 90 percent probabilitydetectability factor D^90), with pulse repetition fre-quency (PRF) as a parameter. The experiments wereperformed during World War II at the MIT RadiationLaboratory. (From Ref. 15, Fig. 8.7.)
matched-filter condition as stated by North2 is that the receiver transfer charac-teristic must be the complex conjugate of the spectrum of the echo at thereceiving-antenna terminals.
2.4 MINIMUM DETECTABLE SIGNAL-TO-NOISERATIO
In Sec. 2.3, factors in the range equations were defined, and some information onhow to evaluate them in typical cases was given. However, several very impor-tant factors were not covered because they are of sufficient importance to war-rant more extensive treatment in separate sections. In this section and in Sees.2.5 to 2.7, these additional factors will be discussed.
The quantities Pr,min, (S/N)min9 and D0 are all related, as indicated in the de-velopment of Eqs. (2.3) to (2.9). Determination of the appropriate numbers to usefor these quantities in their respective equations is a basic problem of radar rangeprediction. As will be seen, one of the problems is to define the meaning of de-tectable.
BT
DETE
CTAB
ILITY
FAC
TOR
DQOO
) (DE
CIBE
LS)

Integration of Signals. Detection of radar echo signals is usually (with someexceptions) accomplished by first integrating (e.g., adding) a sequence of receivedpulses and basing the detection decision on the resultant integrated signal voltage.Integrators that perform this operation will of course necessarily add noise as wellas signals, but it is demonstrable that the ratio of the added signal voltages to theadded noise voltages will be greater than the preintegration signal-to-noise ratio.Stated otherwise, the detectable signal-to-noise ratio evaluated ahead of anintegrator will be smaller than when detection is performed by using single pulses.
There are many different methods of accomplishing integration. One methodis the use of a feedback-loop delay line with a delay time equal to the interpulseperiod, so that signals (and noise) separated by exactly one pulse period will bedirectly added. Integration also occurs for visual detection by human radar oper-ators if the phosphor of the cathode-ray-tube radar display (such as a PPI) hassufficient luminous persistence. In recent years, integration methods based ondigital circuitry have become practical and are now perhaps the method of choicein many if not most cases.
The benefit of integration is a function of the number of pulses integrated. Ifintegration is performed in the predetection stages of a receiver, ideally the ad-dition of M equal-amplitude phase-coherent signal pulses will result in an output(integrated) pulse of voltage M times the single-pulse voltage. Adding M noisepulses, however, will result in an integrated noise pulse whose rms voltage isonly VM times as great as that of a single noise pulse if (as is true of ordinaryreceiver noise and many other types of noise) the added noise pulses are notphase-coherent. Therefore the signal-to-noise voltage-ratio improvement is, ide-ally, MIvM = VM. Consequently the signal-to-noise power-ratio improvement,and the reduction of the single-pulse minimum-detectable signal-to-noise powerratio, is equal to M.
Integration can also be performed after detection. In fact postdetection inte-gration is used more commonly than is predetection integration, for reasons thatwill be explained, but the analysis of the resulting improvement is then muchmore complicated. After detection, the signals and the noise cannot be regardedas totally separate entities; the nonlinear process of detection produces an insep-arable combination of signal and noise, so that one must then consider the com-parison of signal-plus-noise to noise. As will be shown, the improvement that re-sults from this type of integration is usually not as great as with ideal predetectionintegration of the same number of pulses. Nevertheless, postdetection integrationproduces worthwhile improvement. Moreover, "ideal" predetection integrationis virtually unachievable because the echo fluctuation from most moving targetsseverely reduces the degree of phase coherence of successive received pulses.With rapidly fluctuating signals, in fact, postdetection integration will providegreater detectability improvement than does predetection integration, as dis-cussed later in this section under the heading "Predetection Integration."
Number of Pulses Integrated. The number of pulses integrated is usuallydetermined by the scanning speed of the antenna beam in conjunction with theantenna beamwidth in the plane of the scanning. The following equation can beused for calculating the number of pulses received between half-power-beam-width points for an azimuth-scanning radar:
M= _^ (2.16)6 RPM cos 6e

where (fr is the azimuth beam width, PRF is the radar pulse repetition frequency inhertz, RPM is the azimuthal scan rate in revolutions per minute, and Qe is thetarget elevation angle. This formula strictly applies only if <j>/cos Qe, the "ef-fective" azimuth beamwidth, is less than 360°. (At values of 6e for which <|>/cos 6eis greater than 360°, the number of pulses computed from this formula will obvi-ously be meaningless. Practically, it is suggested that it be applied only for ele-vation angles such that <|>/cos Qe is less than about 90°.) This formula is based onthe properties of spherical geometry. The formula also assumes that the beammaximum is tilted upward at the angle 6e, but it can be applied with negligibleerror if Qe is only approximately equal to the beam tilt angle.
The formula for the number of pulses within the half-power beamwidth for anazimuth- and elevation-scanning radar (which can be applied with minor modifi-cation to a radar scanning simultaneously in any two orthogonal angular direc-tions) is
M= *JP (2.17)6OVyRPM cos O6
where <j> and B are the azimuth (horizontal-plane) and elevation (vertical-plane)beam widths in degrees, Qe is the target elevation angle, o>v is the vertical scanningspeed in degrees per second, and tv is the vertical-scan period in seconds (in-cluding dead time if any). This formula should also be restricted to elevation an-gles for which <|>/cos Qe is less than about 90°. Here M is a function of the targetelevation angle not only explicitly but also implicitly in that o>v may be a functionof 6e.
Some modern radars, especially those capable of scanning by electronic means—i.e., without mechanical motion of the antenna—employ step scanning. In thismethod, the antenna beam is pointed in a fixed direction while a programmed num-ber of pulses is radiated in that direction. Then the beam is shifted to a new direction,and the process is repeated. The number of pulses integrated in this scanning methodis thus determined by the programming and not by the beamwidth. Also, the inte-grated pulses are then all of the same amplitude (except for the effect of target fluc-tuation), and so there is no pattern loss of the type described in Sec. 2.7. There is,however, a statistical loss if the target direction and the antenna beam maximum donot always coincide when the pulses are radiated.
Evaluation of Probabilities. As was mentioned in Sec. 2.2, if a thresholddevice is employed to make a decision as to the presence or absence of a signalin a background of noise, its performance can be described in terms of twoprobabilities: (1) the probability of detection, Pd9 and (2) the false-alarmprobability, Pfa. The threshold device is characterized by a value of receiveroutput voltage Vt (the threshold, equivalent to Marcum's3 bias level), which, ifexceeded, results in the decision report that a signal is present. If the thresholdvoltage is not exceeded at a particular instant, the detector reports "nosignal."
There is always a definite probability that the threshold voltage will be ex-ceeded when in fact no signal is present. The statistics of thermal random-noisevoltage are such that there is a usually small but nonzero probability that it canattain a value at least equal to the saturation level of the receiver. (In the math-ematical theory of thermal noise, there is a nonzero probability that it can attainany finite value, however large.) The probability that Vt is exceeded when no sig-nal is present is the false-alarm probability. It is calculated from the equation

Pfa = fPnMdV (2.18)
Vt
where pn(v) is the probability density function of the noise. The probability ofdetection is given by the same expression, with the probability density functionthat of the signal-noise combination (usually called signal-plus-noise, but the4'addition" is not necessarily linear):
OCPd = J Psn(v)dv (2.19)
The signal-plus-noise probability density function psn(v) depends on the signal-to-noise ratio as well as on the signal and noise statistics. Also, both pn and psnare functions of the rectification law of the receiver detector and of anypostdetection processing or circuit nonlinearities. Primarily, however, psn andtherefore the probability of detection are functions of the signal-to*noise ratio.From Eq. (2.19), the variation of Pd with SIN can be determined. As would log-ically be assumed, it is a monotonic-increasing function of SIN for a given valueof Vt. Similarly, the variation of Pfa as a function of V1 can be found from Eq.(2.18); it is a monotonic-decreasing function.
The method of applying these concepts to the prediction of radar range con-sists of four steps: (1) decide on a value of false-alarm probability that is accept-able (the typical procedure for making this decision will be described); (2) for thisvalue of Pf09 find the required value of threshold voltage Vn through Eq. (2.18);(3) decide on a desired value of Pd (in different circumstances, values rangingfrom below 0.5 up to as high as perhaps 0.99 may be selected); and (4) for thisvalue of Pd and for the value of Vt found in step 2 find the required signal-to-noiseratio through Eq, (2.19). This requires evaluating the function p5n(v), taking intoaccount the number of pulses integrated. Iteration is required, in this procedure,to find the value of D0 corresponding to a specified probability of detection andnumber of pulses integrated. The value of Z)0 thus found is the value to be used inthe range equation [e.g., Eqs. (2.10) and (2.11)].
The process of finding the required value of D0 for use in the range equation isgreatly facilitated by curves that relate the number of pulses integrated to D0 withPfa and Pd as parameters. Many such curves have been published, and some rep-resentative ones are given as Figs. 2.3 through 2.7. The principal difficulty incomputing them is determination of the probability density functions pn(v) andpsn(v) and in performing the requisite integrations. North2 gives the exact func-tions that apply for single-pulse detection with a linear rectifier as detector andthe approximations that apply when many pulses are integrated. The densityfunctions appropriate to other situations, e.g., square-law detection and fluctua-tion of signals, are given by various authors.3"10
The decision as to the acceptable level of false-alarm probability is usuallymade in terms of a concept called false-alarm time, which will here be defined asthe average time between false alarms. Other definitions are possible; Marcum3
defines it as the time for which the probability of at least one false alarm is 0.5.However, the average time between false alarms seems a more practically usefulconcept. With it, for example, one can compute the average number of falsealarms that will occur per hour, day, year, etc. With this definition, the false-alarm time is given by

PROBABILITY OF DETECTIONFIG. 2.3 Required signal-to-noise ratio (detectability factor) for a single-pulse, linear-detector, nonfluctuating target as a function of probability of de-tection with false-alarm probability (Pfa) as a parameter. (From Ref. 13.)
MTtfa = -p- (2.20)
1 fa
where M is the number of pulses integrated and T is the pulse duration.This formula assumes that the integrator output is sampled at time intervals
equal to T. If range gates are employed and M pulses are integrated, if the ON timeof the gate tg is equal to or greater than the pulse length T, and if there is somefraction of the time 8 when no gates are open (dead time, e.g., just before, during,and after the occurrence of the transmitter pulse), then the formula is
Mtg
*f" = Pfa(l - 5) (2'21)
These false-alarm-time formulas assume that the receiver predetection noisebandwidth Bn is equal to or greater than the reciprocal of the pulse length andthat the postdetection (video) bandwidth is equal to or greater than 0.5 Bn (as itusually is). These assumptions, usually met, amount to assuming that values ofthe noise voltage separated by the pulse duration are statistically independent;this independence occurs for times separated by 1/Bn, sometimes called theNyquist interval. Since ordinarily Bn = I/T and tg = T, 1/Bn is sometimes used inplace of T or t in the false-alarm-time equations.
Marcum's false-alarm number ri is related to the false-alarm probability by theequation
DETE
CTAB
ILITY
FAC
TOR
D 0 (D
ECIBE
LS)

NUMBER OF PULSESFIG. 2.4 Required signal-to-noise ratio (detectability factor) as a function ofnumber of pulses noncoherently integrated, linear detector, nonfluctuating target,and 0.5 probability of detection. (From Ref. 13.)
I-(I- Pfaf = 0.5 (2.22«)For the usual large values of n' that are of interest, a highly accurate approximatesolution of this equation for Pfa is
^.!e^.o^l C.22H
Fluctuating Target Cross Section. In general, the effect of fluctuation is torequire higher signal-to-noise ratios for high probability of detection and lowervalues for low probability of detection than those required with nonfluctuatingsignals. Swerling has considered four cases, which differ in the assumed rate offluctuation and the assumed statistical distribution of the cross section. The twoassumed rates are (1) a relatively slow fluctuation, such that the values of a forsuccessive scans of the radar beam past the target are statistically independentbut remain virtually constant from one pulse to the next, and (2) a relatively fastfluctuation, such that the values of cr are independent from pulse to pulse withinone beamwidth of the scan (i.e., during the integration time).
The first of the two assumed distributions for the received-signal voltage is ofthe Rayleigh form,* which means that the target cross section cr has a probabilitydensity function given by
*The Rayleigh density function for a voltage v is
/ x 2V - V2Ir2
p(v) =-^e
where r is the rms value of v.
DETE
CTAB
ILITY
FAC
TOR
D 0 (D
ECIB
ELS)

NUMBER OF PULSESFIG. 2.5 Required signal-to-noise ratio (detectability factor) as a func-tion of number of pulses noncoherently integrated, linear detector,nonfluctuating target, and 0.9 probability of detection. (From Ref. 13.)
p(<r)==e-°ll} (2.23)(T
where a is the average cross section. (This is a negative-exponential density func-tion, but a target having this distribution is called a Rayleigh target because thisdistribution of a produces a received signal voltage which is Rayleigh-distributed.) The second assumed cross-section density function is
P(a) = ̂ e~2^ (2.24)
The first distribution, Eq. (2.23), is observed when the target consists of manyindependent scattering elements of which no single one or few predominate.Many aircraft have approximately this characteristic at microwave frequencies,and large complicated targets are usually of this nature. (This result is predicted,for such targets, by the central limit theorem of probability theory.) The seconddistribution, Eq. (2.24), corresponds to that of a target having one main scatteringelement that predominates together with many smaller independent scattering el-ements. In summary, the cases considered by Swerling are as follows:
Case 1 Eq. (2.23), slow fluctuationCase 2 Eq. (2.23), fast fluctuationCase 3 Eq. (2.24), slow fluctuationCase 4 Eq. (2.24), fast fluctuation
DETE
CTAB
ILITY
FAC
TOR
D 0 (D
ECIB
ELS)

NUMBER OF PULSESFIG. 2.6 Required signal-to-noise ratio (detectability factor) as a function ofnumber of pulses noncoherently integrated, square-law detector, Swerling Case 1fluctuating target, and 0.5 probability of detection. (From Ref. 13.)
The distribution of Eq. (2.24) is sometimes assumed for a small, rigid streamlinedaircraft at the lower radar frequencies (e.g., below 1 GHz). Subsequent toSwerling's work, it has been found that many targets of the non-Rayleigh type arebetter represented by the so-called log-normal distribution, and analyses havebeen made for this case.9
Swerling's Case 1 is the one most often assumed when range prediction is tobe made for a nonspecific fluctuating target. Results for this case are presented inFigs. 2.6 and 2.7. Curves for the other fluctuation cases and for additional valuesof detection probability are given in Refs. 13 and 14.
Detector Laws. A linear detector is a rectifier which has the rectificationcharacteristic
',:'-?' B? 8} **>where I0 is the instantaneous output current, V1- is the instantaneous input volt-age, and a is a positive constant. Typical diodes approximate this law if V1 islarger than some very small value (e.g., a few millivolts). Such a diode is ordi-narily used as the second detector of a superheterodyne radar receiver. Also, ap-preciable RF and IF gain usually precedes the second detector, so that the volt-age applied to it is usually large enough (typically, an appreciable fraction of avolt) to ensure this "linear" type of operation.
A square-law detector is one that has the nonlinear characteristic
/O = CtV;2 (2.26)
DETE
CTAB
ILITY
FAC
TOR
D 0 (D
ECIB
ELS)

NUMBER OF PULSESFIG. 2.7 Required signal-to-noise ratio (detectability factor) as a function ofnumber of pulses noncoherently integrated, square-law detector, Swerling Case 1fluctuating target, and 0.9 probability of detection. (From Ref. 13.)
Marcum3 showed that a square-law detector is very slightly superior to a lineardetector when many pulses are integrated, by about 0.2 dB. For a few pulses in-tegrated, 10 or less, a linear detector is slightly superior—again, by about 0.2 dBor less. The mathematical analysis of probability of detection is somewhat moretractable when a square-law detector is assumed; this is probably its principal ad-vantage.
The complexity of this matter is further compounded by the fact that, becauseof the statistics of the signal-noise superposition, in a linear rectifier there is asquare-law relationship between the signal input voltage and the signal-plus-noiseoutput voltage for small signal-to-noise ratios. This relationship becomes linearfor large signal-to-noise ratios, as shown by Bennett,22 North, and Rice.23 Be-cause of this effect, it is sometimes erroneously thought that such a detector be-comes square-law for small signal-to-noise ratios. But it is the input signal-plus-noise voltage V1, and not the signal-to-noise ratio, that determines whether adiode rectifier is a linear or a square-law detector.
Curves for Visual Detection. The curves of Figs. 2.3 to 2.7 apply when thedetection decision is based on an automatic threshold device as described. It isreasonable to suppose, however, that a human observer of a cathode-ray-tubedisplay makes decisions in an analogous manner. That is, the equivalent of athreshold voltage (which would be a luminosity level for the PPI-scope type ofdisplay and a "pip-height" level for the A-scope display) exists somewhere inthe observer's eye-brain system. This threshold, resulting in a particular false-alarm probability, is probably related to the observer's experience andpersonality: his or her innate cautiousness or daring. The probability ofdetection probably depends not only on the signal-to-noise ratio in relation tothe threshold but on the observer's visual-mental acuity, alertness or fatigue,
DETE
CTAB
ILITY
FAC
TOR
D 0 (D
ECIBE
LS)

and experience. Consequently, curves calculated for an automatic threshold de-cision device cannot be assumed to apply accurately to the performance of a hu-man observer of a cathode-ray-tube display. But such an assumption does notgive grossly erroneous results, and it is justifiable when experimental human-observer data are not available or are of questionable accuracy.
Curves based on actual experiments with human observers, analogous tothose of Figs. 2.4 through 2.7, are given in Ref. 14, Chap. 2, along with furtherdiscussion of visual detection.
Other Detection Methods. The discussion and results that have beenpresented have assumed perfect postdetection (video) integration of pulsesprior to decision by an automatic threshold device. The noise statistics havebeen implicitly assumed to be those of ordinary receiver noise of quasi-uniformspectral density and (before detection) of gaussian probability density. A greatmany other detection procedures and signal-noise statistics are possible. Someof them are discussed in Ref. 14, Chap. 2.*
Predetection Integration. The results depicted in Figs. 2.3 through 2.7 applyfor perfect postdetection (video) integration of a specified number of pulses. Itwas shown by North2 that under ideal conditions predetection integrationresults in the smallest possible detectability factor and that for idealpredetection integration of M pulses the following relation holds:
D0(M) = D^l)IM (2.27)
That is, the minimum detectable signal-to-noise power ratio at the demodulatorinput terminals is improved, relative to single-pulse detection, by a factor exactlyequal to the number of pulses integrated, M. For perfect postdetection integra-tion, the improvement factor is generally less than M, asymptotically approach-ing M as M becomes indefinitely large.
An exception occurs in the M < 10 region for fast-fluctuating targets and highprobabilities of detection. For those circumstances the postdetection integrationimprovement factor can actually exceed M, and under the same circumstancespredetection integration yields little or no improvement. The result of adding suc-cessive fast-fluctuating signals before detection, with virtually uncorrelatedphases, is practically the same as that of adding noise voltages. Therefore there isvirtually no integration improvement.
Predetection integration is also called coherent integration, because of its de-pendence on phase coherence of the integrated pulses, and postdetection integra-tion is called noncoherent integration.
When integration is not perfect, as is always the case practically, if the valueof D0 used in the range equation is based on perfect integration, an imperfect-integration loss factor or factors must be included in the system loss factor L, asdiscussed in Sec. 2.7.
Although the full benefits of predetection integration are realizable only fornonfluctuating targets, some benefit can be achieved by predetection integrationof a moderate number of slowly fluctuating targets. For such targets, the phasefluctuation from pulse to pulse is small. This type of integration is being em-ployed to an increasing extent in modern systems when the utmost sensitivity isimportant and when fast fluctuation is not expected.
*Chapter written by Lowell W. Brooks, Technology Service Corporation, Salida, Colo.

Since radial target motion produces a frequency shift of the received-echo sig-nal (doppler effect) which is proportional to the target's radial velocity, this shiftmust be taken into account if predetection integration is used. This is done inpulse doppler radar (Chap. 17).
Some radar systems that integrate many pulses utilize a combination of coher-ent and noncoherent integration when the phase stability of the received pulses issufficient for some coherent integration but not great enough to allow coherentintegration of the entire pulse train during the antenna on-target dwell time. If thetotal number of received pulses is Af and M of them (with M < N) are coherentlyintegrated and if the coherent integrator is followed by a noncoherent integrator,then (assuming an appropriate implementation and ideal integrations) thedetectability factor will be
%M,N) = Dv(NIAf)IM (2.28)
where D0(M,AO means the detectability factor for the assumed combination of co-herent and noncoherent integration and D0(NIM) is the detectability factor fornoncoherent integration of NIM pulses with no coherent integration (e.g., a valueread from curves such as those of Figs. 2.4 through 2.7). As an example, if a trainof N = 24 pulses is received and each set of M = 8 pulses is predetection- (co-herently) integrated and if the predetection integrator is followed by apostdetection (noncoherent) integrator, the integration process produces at best acombined detectability-factor improvement corresponding to that of coherent in-tegration of 8 pulses and noncoherent integration of 3 pulses.
2.5 SYSTEMNOISETEMPERATURE
The concept of a noise temperature is derived from Nyquist's theorem,24 whichstates that if a resistive circuit element is at temperature T (kelvins) there will begenerated in it an open-circuit thermal-noise voltage given by
Vn = VJkTRB volts (2.29)
where k is Boltzmann's constant (1.38054 x 10~23 Ws/K), R is the resistancein ohms, and B is the bandwidth, in hertz, within which the voltage is measured(that is, the passband of an infinite-impedance voltmeter). The absence of the fre-quency in this expression implies that the noise is white—that the spectrum isuniform and extends to infinitely high frequency. But this also implies infinite en-ergy, an obvious impossibility, indicating that Eq. (2.29) is an approximation. Amore exact expression, which has frequency dependence, must be used if the ra-tio flT exceeds about 108, where/is the frequency in hertz and T is the kelvintemperature of the resistor. Thus Eq. (2.29) is sufficiently accurate at a frequencyof 30 GHz if the temperature is at least 300 K. The more accurate equations aregiven in Ref. 14 and in radio astronomy texts.
Available Power, Gain, and Loss. As thus defined, Vn is the open-circuitvoltage at the resistor terminals. If an external impedance-matched load ofresistance RL = R is connected, the noise power delivered to it will be
Pn = kTBn (2.30)

which does not depend on the value of R. This is of course also an approxima-tion, but it is quite accurate at ordinary radar frequencies and temperatures. Thismatched-load power is called the available power.17
The concepts of available power, available gain, and its reciprocal, availableloss, are assumed in all noise-temperature and noise-factor equations. These andother noise-temperature concepts are explained fully in Refs. 14, 17, and 25.Briefly, available power at an output port is that which would be delivered to aload that matches (in the complex-conjugate sense) the impedance of the source.Available gain of a two-port transducer or cascade of transducers is the ratio ofthe available power at the output port to that available from the source connectedto the input port, with the stipulation that the available output power be mea-sured with the actual input source (not necessarily impedance-matched) con-nected.
Noise Temperature. The usual noise that exists in a radar receiving systemis partly of thermal origin and partly from other noise-generating processes.Most of these other processes produce noise which, within typical receiverbandwidths, has the same spectral and probabilistic nature as does thermalnoise. Therefore it can all be lumped together and regarded as thermal noise.This is done, and the available-power level Pn is described by assigning to thenoise a semifictitious "noise temperature" Tn, which is
Tn = PnKkBn) (2.31)
This is of course simply an inversion of Eq. (2.30), except that T in Eq. (2.30)refers to an actual (thermodynamic) temperature. The temperature defined byEq. (2.31) is semifictitious because of the nonthermal origin of some of the noise.When this temperature represents the available-noise-power output of the entirereceiving system, it is commonly called the system noise temperature or operat-ing noise temperature,17 and it is then used to calculate the system noise powerand signal-to-noise ratio, as in Eqs. (2.4) to (2.6).
The Referral Concept. A receiving system can be represented as a cascadeof two-port transducers, preceded by a source (the antenna) and terminated bya load. [However, in the discussion of system noise temperature, only thoseparts of the receiver that precede the detector (demodulator) are ofsignificance, for the noise level at that point determines the signal-to-noise ratiofor signal-detection-calculation purposes.]
Noise may arise at any and all points in this cascade, so that the noise levelchanges from point to point. The important quantity is the output noise powerPno. For purposes of signal-to-noise calculation, however, it is convenient to re-fer this output noise to the system input terminals. This is done by defining thesystem noise temperature Ts so that it satisfies the relation
kTsBn = PJG0 (2.32)
where G0 is the overall-system available gain and Bn is the noise bandwidth of thesystem [Eq. (2.14)]. The output power Pno is thus "referred" to the system input(the antenna terminals), and Ts is actually the system input noise temperature.The product W8Bn is thus the system output noise power referred to the antennaterminals.
Each two-port transducer of the receiving-system cascade can be regarded as

having its own effective input noise temperature Te, representing its intrinsicavailable output noise power referred to its own input terminals. Here intrinsicmeans the power that the transducer would generate with a noise-free input ter-mination of the same impedance as the actual input termination. Transducer out-put power is referred to the input terminals by dividing the output power by theavailable gain of the transducer.
For an TV-transducer cascade, the system input noise temperature (with theantenna terminals considered to be the system input terminals) is then given by
T.-T. + Z -£ .2.33,
Here T0 is the antenna noise temperature, representing the available noise powerat the antenna terminals, and G, is the available gain of the system between itsinput terminals and the input terminals of the /th cascaded component. (By thisdefinition G1 = 1 always.)
To illustrate these principles concretely, this formula will here be applied to atwo-transducer cascade representing a typical receiving system (Fig. 2.8). Thefirst transducer is the transmission line that connects the antenna to the receiverinput terminals, and the second transducer is the predetection portion of the re-ceiver itself. (As mentioned above, for purposes of signal-noise analysis subse-quent portions of the receiver are not considered.) If desired, a many-transducerreceiving system could be further broken down, with a preamplifier and possiblyother units considered as separate elements of the cascade.
For this system, if the receiving-transmission-line noise temperature is repre-sented by Tr and its loss factor is Lr (=1/G2) and if the receiver effective inputnoise temperature is Te, Eq. (2.33) becomes
T5 = Ta + TV + LrTe (2.34)
It now remains to discuss evaluation of T0, Tr, Lr, and Te.
Antenna Noise Temperature. Antenna noise is the result of (1) noise in theform of electromagnetic waves received by the antenna from external radiatingsources and (2) thermal noise generated in the ohmic components (resistiveconductors and imperfect insulators) of the antenna structure. The productkT0Bn is the noise power available at the antenna terminals within the receiverbandwidth.
This noise temperature is dependent in a somewhat complicated way on thenoise temperatures of various radiating sources within the receiving-antenna pat-tern, including its sidelobes and backlobes. The concept of noise temperature ofa radiating source is based on Planck's law or on the Rayleigh-Jeans approxima-tion to it, analogous to the relationship of resistor noise temperature to Nyquist'stheorem.
FIG. 2.8 Block diagram of a cascade receiving system.
SOURCE(ANTENNA)
T0
PASSIVETRANSDUCER(TRANS. LINE)
Lr, Tr
ACTIVETRANSDUCER(RECEIVER)
T6,G
OUTPUTBA

The antenna noise temperature is not dependent on the antenna gain andbeam width when a uniform-temperature source fills the beam. If the noisesources within the beam are of different temperatures, the resulting antenna tem-perature will be a solid-angle-weighted average of the source temperatures. Thenoise temperatures of most of the radiating sources that an antenna "sees" arefrequency-dependent; therefore antenna temperature is a function of frequency.That is, antenna noise is not truly "white," but within any typical receiverpassband it is virtually white.
In the microwave region, it is also a function of the antenna beam elevationangle, because in this region most of the "sky noise" is the result of atmosphericradiation. This radiation is related to atmospheric absorption, which is greater atlow angles where the antenna beam sees a thicker slice of the lossy atmospherethan it does at higher angles.
Curves of antenna temperature for a lossless antenna are shown in Fig. 2.9,calculated for typical conditions.14'25
FIG. 2.9 Noise temperature of an idealized antenna (lossless, no earth-directedsidelobes) located at the earth's surface, as a function of frequency, for a number of beamelevation angles. Solid curves are for geometric-mean galactic temperature, sun noise 10times quiet level, sun in unity-gain sidelobe, cool temperate-zone troposphere, 2.7 K cos-mic blackbody radiation, and zero ground noise. The upper dashed curve is for maximumgalactic noise (center of galaxy, narrow-beam antenna), sun noise 100 times quiet level,and zero elevation angle; other factors are the same as for the solid curves. The lowerdashed curve is for minimum galactic noise, zero sun noise, 90° elevation angle. (Thebump in the curves at about 500 MHz is due to the sun-noise characteristic. The curves forlow elevation angles lie below those for high angles at frequencies below 400 MHz becauseof reduction of galactic noise by atmospheric absorption. The maxima at 22.2 and 60 GHzare due to water-vapor and oxygen absorption resonances; see Fig. 2.19.) (From Ref. 13.)
FREQUENCY (MHz)
NOIS
E TE
MPER
ATUR
E (K
)

The curves of Fig. 2.9 apply to a lossless antenna that has no part of its patterndirected toward a warm earth. The lossless condition means that the curves rep-resent only the noise received from external radiating sources. Therefore anythermal noise generated in the antenna must be added to the noise represented bythese curves. In most practical cases, a ground noise-temperature componentmust also be added because part of the total antenna pattern is directed towardthe ground. (This will be true because of sidelobes and backlobes even if the mainbeam is pointed upward.) But then also the sky-noise component given by Fig.2.9 must be reduced somewhat because part of the total antenna pattern is notthen directed at the sky. The reduction factor is (1 - TagITtg), where Tag is theground noise-temperature contribution to the total antenna temperature and Ttg isthe effective noise temperature of the ground.
If a is the fraction of the solid-angle antenna power pattern subtended by theearth, then Tag = a.Ttg. If the earth is perfectly absorptive (a thermodynamicblackbody), its effective noise temperature may be assumed to be approximately290 K. A suggested conventional value for Tag is 36 K, which would result if a290 K earth were viewed over a ir-steradian solid angle by sidelobes and back-lobes averaging 0.5 gain (-3 dB). These sidelobes are typical of a "good" radarantenna but not one of the ultralow-noise variety.
Moreover, some practical antennas have appreciable ohmic loss, expressed bythe loss factor La (Sec. 2.3). An additional thermal-noise contribution of amountTta(\ - l/La) then results, where Tta is the thermal temperature of the lossy ma-terial of the antenna. However, the noise from external sources is then also re-duced by the factor I/1La. The total correction to the temperature values given byFig. 2.9, to account for both ground-noise contribution and antenna loss, is thengiven by the following formula:
Tatt - TaglTtg) + TagTa = ?*-£ ^ + Tta(l - 1/LJ (2.35«)
La
where Tar is the temperature given by Fig. 2.9. For Tag = 36 K and
Ttg = Tta = 290 K, this becomes
0.876 Ti - 254Ta = + 290 (2.35«
La
and if L0 = 1 (lossless antenna), it further simplifies to
Ta = 0.876 JJ + 36 (2.35c)
Transmission-Line Noise Temperature. Dicke26 has shown that if a passivetransducer of noise bandwidth Bn connected in a cascade system is at a thermaltemperature Tt and if its available loss factor is L, the thermal-noise poweravailable at its output terminals is
Pno = kTfln(\ - UL) (2.36)
A transmission line is a passive transducer. From Eq. (2.36) together with Eq.(2.31) and the definition of input temperature, it is deduced that the input noisetemperature of a receiving transmission line of thermal temperature Ttr and lossfactor Lr is

Tr = Ttr(Lr - 1) (2.37)
(In this referral operation, multiplication by loss factor is equivalent to divisionby gain.) The receiving-transmission-line loss factor Lr is defined in terms of aCW signal received at the nominal radar frequency by the antenna. It is the ratioof the signal power available at the antenna terminals to that available at the re-ceiver input terminals (points A and B, Fig. 2.8). A suggested conventional valuefor Ttr is 290 K.
Receiver Noise Temperature. The effective input noise temperature of thereceiver Te may sometimes be given directly by the manufacturer or thedesigner. In other cases, the noise figure Fn may be given. The relationshipbetween the noise figure and the effective input noise temperature of thereceiver or, in fact, of any transducer is given by17
Te = T0(Fn - 1) (2.38)
where T0 is, by convention, 290 K. In this formula Fn is a power ratio, not thedecibel value that is usually given.
This formula is applicable to a single-response receiver (one for which a singleRF input frequency corresponds to only one output or IF frequency and viceversa). Methods of computing noise temperatures when a double- or multiple-response receiver is used (e.g., for a superheterodyne receiver withoutpreselection) are described in Refs. 17 and 25. Single-response receivers are or-dinarily used in radar systems.
It is worth mentioning a point that has been well emphasized in the specializedliterature of radio noise but is nevertheless easily overlooked. A receiver noise-temperature or noise-figure rating applies when a particular terminating imped-ance is connected at the receiver input. If this impedance changes, the noise tem-perature changes. Therefore, in principle, when a noise-temperature rating isquoted for a receiver, the source impedance should be specified, especially sincethe optimum (lowest) noise temperature does not necessarily occur when imped-ances are matched. However, when a receiver noise temperature is quoted with-out this impedance specification, it is presumable that the optimum source im-pedance is implied.
2.6 PATTERNPROPAGATIONFACTOR
The pattern propagation factors Ft and Fr in the range equation account for thefacts that (1) the target may not be in the beam maximum of the vertical-planeantenna pattern and (2) non-free-space wave propagation may occur. This singlefactor, rather than two separate factors, is designed to account for both of thoseeffects. This is necessary because they become inextricably intertwined in thecalculation of multipath interference, which is the most important non-free-spaceeffect.
As will be seen, this effect can result in very considerable increase or decreaseof the radar detection range compared with the free-space range. In this chapter,the basic ideas of pattern-propagation-factor calculation and some typicalmultipath-interference results will be presented. Additional details are given inRef. 14, Chap. 6, and in Ref. 15.