Centre for Automotive Engineering Research Workshop, 13th€¦ · 1 Alfredsson P.H., Bakchinov...
22
Sergey Boronin Research Fellow School of Computing, Engineering and Mathematics Sir Harry Ricardo Laboratories University of Brighton Non-modal stability of round viscous jets Centre for Automotive Engineering Research Workshop, 13 th of January 2012
Transcript of Centre for Automotive Engineering Research Workshop, 13th€¦ · 1 Alfredsson P.H., Bakchinov...

Sergey Boronin Research Fellow School of Computing, Engineering and Mathematics Sir Harry Ricardo Laboratories University of Brighton
Non-modal stability of round viscous jets
Centre for Automotive Engineering Research Workshop, 13th of January 2012

2
Outline
Ø Motivation, key ideas of modal and non-modal stability analisys
Ø Governing equations and boundary conditions
Ø Main flow velocity profiles
Ø Results and discussion
Ø Summary and conclusions

3
Motivation
Diesel jet break-up in internal combustion engines
Ø Aim of the study: improvement of theoretical predictions of break-up lengths for round viscous jets
Ø Stability of jets was analysed previously only within the framework of classical modal approach. Non-modal instability?

4
Key ideas of modal stability approach
Main plane-parallel shear flow: Small disturbances: Consider solutions in the form of travelling waves (equivalent to Fourier-Laplace transform):
}0,0),({ yU=V
x
y
U(y)
0
1
-1
z pPp ʹ′+=ʹ′+= ,vVv
))(exp()(),( tzkxkiyt zx ω−+=ʹ′ qrq
⎩⎨⎧
=±=
=
0),1(,ty
iLq
qq ω q – vector of independent variables (normal velocity and normal vorticity for 3D disturbances), L – linear ordinary differential operator
Solution is the system of eigenfunctions (normal modes): {qn(y), ωn(kx, kz)} The flow is stable if all normal modes decay (Im{ωn}<0, ∀n)
Eigenvalue problem:

5
Modal stability: pros and cons ü Squire theorem (2D disturbances are the most unstable)
ü Modal theory predicts values of critical Reynolds numbers for several shear flows (plane channel, boundary layer)
ü Examples of failures: Poiseuille pipe flow (stable at any Re according to modal theory, unstable in experiments!)
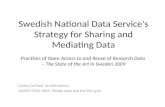
ü Transition of shear flows is usually accompanied by 3D streamwise-alongated disturbances (”streaks”, see Fig.)
1 Alfredsson P.H., Bakchinov A.A., Kozlov V.V., Matsubara M. Laminar-Turbulent transition at a high level of a free stream turbulence. In: Nonlinear instability and transition in three-dimenasional boundary layers Eds. P.H. Duck, P. Hall. Dordrecht, Kluwer, pp. 423-436 (1996)
Fig. Visualization of streaks in boundary-layer flow1

6
Algebraic (non-modal) instability
Fig. Time-evolution of the difference of two decaying non-orthogonal vectors2
2 P.J. Schmid, Nonmodal Stability Theory, Annu.
Rev. Fluid Mech, V. 39, pp. 129-162 (2007)
Ø A necessity for linear “bypass transition” theories (non-modal growth)
Ø Mathematical reason for non-modal instability: • Differential operators are non-Hermitian (eigenvectors are not orthogonal) • Solutions are linear combinations of normal modes, growth is possible even
if all modes decay (see Fig.)

7
Flow configuration
• Surrounding gas and jet liquid are incompressible and viscous Newtonian fluids
• Cylindrical coordinate system (z, r, θ)
• Parameters of fluids (gas and liquid, α = g, l)
ρα, µα are densities and viscosities vα, pα are velocities and pressures
r z
θ gas
liquid Interface

8
Non-dimensional governing equations
l
g
l
glg
l
llUL
rrr
rrzgl
µ
µζ
ρ
ρη
ζη
µρ
θα ====
∂
∂+⎥⎦
⎤⎢⎣
⎡∂
∂
∂
∂+
∂
∂=Δ= ,,ReRe,Re,11,, 2
2
22
2
011=
∂∂
+∂∂
+∂∂
θααα w
rrrv
rzu
αα
ααααα
αα
α
θu
zpu
rw
ruv
zuu
tu
Δ+∂∂
−=∂∂
+∂∂
+∂∂
+∂∂
Re1
⎟⎠
⎞⎜⎝
⎛ −∂∂
−Δ+∂∂
−=−∂∂
+∂∂
+∂∂
+∂∂
22
2 2Re1
rvw
rv
rp
rwv
rw
rvv
zvu
tv αα
αα
αααααα
αα
α
θθ
⎟⎠
⎞⎜⎝
⎛ −∂∂
+Δ+∂∂
−=+∂∂
+∂∂
+∂∂
+∂∂
222
Re11
rwv
rwp
rrwvw
rw
rwv
zwu
tw αα
αα
ααααααα
αα
α
θθθ
Independent governing parameters: Rel – Reynolds number for jet liquid,
η, ζ – gas-to-liquid density and viscosity ratios
Flow scales: U – liquid velocity at the axis; L – jet radius; ρlU2 – liquid pressure pl; ρgU2 – gas pressure pg;

9
Boundary conditions
Interface Σ : H = r – h(z,θ, t) = 0
⎭⎬⎫
⎩⎨⎧
∂
∂−
∂
∂−=∇∇∇=
θh
rzhHHH 1,1,,/n
gas
liquid n
Σ Kinematic condition: 00 =−
∂
∂+
∂
∂⇔= v
zhu
th
dtdH
Continuity of velocity (no-slip): glglgl wwvvuu === ,,
Normal unit vector n:
Jump in stress due to capillary force R: Rss =− gl η( ) ;We,div
We1;
Re1 2
σααα
LUρnRnvvnp liij
ijjii ==∇+∇+−= ns
Ø Conditions at the interface:
Ø Kinematic condition at the axis3 (r → 0): θθθ
sin~,,0, llll wvpu→
∂
∂
∂
∂
Ø At the infinity (r → ∞): 0,,, →gggg pwvu
3 G.K. Batchelor, A.E. Gill, Analysis of the stability of axisymmetric jets. J. Fluid. Mech., V.14, pp. 529-551 (1962)

10
Main flow: immersed jet
Two velocity profiles for immersed jet (single fluid, no interface):
Ø “Top-hat” profile (close to the orifice)
Ø “Smooth” profile (far downstream)4
( ){ }⎩⎨⎧
>−−
≤=
1,/1exp1,1
)( 221 rrr
rUδ
( )22211)(r
rU+
=
4 L.D. Landau, E.M. Lifshitz, Fluid Mechanics, Pergamon, 1959.
Fig. Velocity profiles of the immersed jet considered

11
Main flow: jet in the air
{ }
,,:0
,,:1,0)(:
,0,0),(,,
∞<=
ʹ′=ʹ′==
→∞→
=
ll
glgl
g
glgl
PUr
UUUUrrUrrU
ζ
V
Ø “Local” axisymmetric velocity profile (cylindrical jet of the fixed radius r = 1):
zr = 1
gas
liquid
Fig. Jet in the air at ζ=0.1, “model” velocity profiles 1 and 2 considered (liquid at r<1 and gas at r>1)
1 2

12
Linear stability problem
( )
,ReRe,11
2Re11
2Re1
Re1
011
2
2
22
2
22
22
ζη
θ
θθ
θ
θ
ααα
α
ααα
α
ααα
α
ααα
α
αα
ααα
αα
α
ααα
lgrrr
rrz
rwv
rwp
rzwU
tw
rvw
rv
rp
zvU
tv
uzpUv
zuU
tu
wrr
rvrz
u
=∂
∂+⎥⎦
⎤⎢⎣
⎡∂
∂
∂
∂+
∂
∂=Δ
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎟⎠
⎞⎜⎝
⎛ −∂
∂+Δ+
∂
∂−=
∂
∂+
∂
∂
⎟⎠
⎞⎜⎝
⎛ −∂
∂−Δ+
∂
∂−=
∂
∂+
∂
∂
Δ+∂
∂−=ʹ′+
∂
∂+
∂
∂
=∂
∂+
∂
∂+
∂
∂
Linearized Navier-Stokes equations for each fluid (α = l, g):

13
Ø Continuity
Ø Kinematic condition
Ø Force balance
ll vxhU
th
=∂
∂+
∂
∂glglggll wwvvUhuUhu ==ʹ′+=ʹ′+ ,,
Linearized boundary conditions Conditions at the interface at ( is the disturbance of the interface) 1=r
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂
∂+
∂
∂=+
∂
∂+
∂
∂
⎟⎟⎠
⎞⎜⎜⎝
⎛+
∂
∂+
∂
∂−
∂
∂−=
∂
∂−
⎟⎟⎠
⎞⎜⎜⎝
⎛ʹ′ʹ′+
∂
∂+
∂
∂=ʹ′ʹ′+
∂
∂+
∂
∂
ggg
lll
g
lg
l
ll
ggg
lll
ww
yw
wwyw
hzhh
Weyv
pyvp
Uhzv
yu
Uhzv
yu
θζ
θ
θζ
η
ζ
2
2
2
21Re2
Re2
,
Ø Kinematic condition at the axis (r → 0): θθθ
sin~,,0, llll wvpu→
∂
∂
∂
∂
Ø At the infinity (r → ∞): 0,,, →gggg pwvu
1<<h

14
Spatial normal modes and eigenvalue problem
Travelling waves (normal modes growing in z): { } },,,{,)(exp)(),,,( * pwvutmkzirtrz =−+= qqq ωθθ
(k – complex wave number, m – integer azimuthal number, ω - real frequency)
Ø Eigenvalue problem:
0:0:10:0
0
=∞→
==
==
=
qqq
q
CrBrAr
L (L – second order linear differential operator 4x4)
Ø System of eigenvalues and eigenfunctions: { } ,...2,1,,:,,We,,,Re =∀ nkm nnl Aωηζ (+ continuum part of the spectrum)
Ø Modal stability analysis: flow is stable if , ∀n 0}Im{ >nk
homogeneous boundary conditions

15
Non-modal stability: optimal disturbances
( )
1,/2,/2
}Re{}Re{}Re{21),(
0 0 0
222
>>==
++= ∫ ∫ ∫Rbma
dtrdrdwvuab
tΕa b R
ωππ
θγ
{ })(exp)exp()(),,,(1
tmizikrtrz nn
nn ωθγθ −⎟⎠
⎞⎜⎝
⎛= ∑
∞
=
Ø Expanding the disturbance into series of eigenfunctions at given m, ω:
(the set of coefficients γn is a spectral projection of a disturbance q)
Ø Evaluation of the growth: density of the kinetic energy
Ø Disturbance with maximum energy at a given position z (optimal disturbances): 1),0(,max),(:? =→− γγγ
γEtΕ

16
Ø Variable mapping (non-uniform mesh, refinement with a decrease in r)
Ø System of N spatial normal modes is found by orthonormalization method5
Ø Optimal perturbations are found by Lagrange-multiplier technique (Resulting generalized eigenvalue problem for energy matrices is solved by QR-algorithm)
Algorithm of the numerical solution
{ } Nnkrm nnl ...1,),(:,,We,,,Re =∀ qωζη
5 S.K. Godunov, On the numerical solution of boundary-value problems for systems of linear differential equations [in Russian], Uspekhi mat. Nauk, V.16, Iss.3, pp.171-174 (1961).

17
Results: Immersed jet, “top-hat” velocity profile
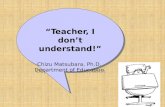
Ø “Top-hat” velocity profile is unstable for all values of azimuthal number m (first mode grows) Ø Highest optimal-to-single mode energy ratio is 20, it corresponds to m=1 (Re=1000)
Fig. Normalized kinetic energy of the optimal disturbance for ‘top-hat’ velocity profile Vs. position downstream z for ω = 0.5, m=0 (a) and ω = 0.2, m=1 (b), Re = 1000. 1 – optimal energy, 2 – energy of the first mode only, 3 – ratio of optimal to single-mode energies
Non-modal stability of jet with “top-hat” velocity profile (close to the orifice)
Maximum optimal energy
increase for m=0 (~3 times)
Maximum optimal energy
increase for m=1 (~20 times)

18
Ø Smooth velocity profile is stable at m=0 and unstable at m>0 (P.J. Morris, 1976) Ø Non-modal growth is significantly stronger for smooth profile and m>0 (optimal-to-single
mode energy ratio around 200 and corresponds to z~15)
Non-modal stability of jet with “smooth” velocity profile (far downstream)
Fig. Normalized kinetic energy of optimal disturbance for ‘smooth’ profile Vs. position downstream z for ω = 0.5, m=0 (a) and ω = 0.2, m=1 (b), Re = 1000. 1 – optimal energy, 2 – energy of the first mode only, 3 – ratio of the optimal to single-mode energies.
Results: Immersed jet, “smooth” velocity profile

19
Results: jet in the air, velocity profile 1
Ø Non-modal growth decreases with an increase in frequency ω of the disturbance Ø Highest optimal growth corresponds to non-axisymmetric disturbances (m>0) Ø Highest optimal-to-single mode energy ratio is of order of 102 for ω=0.1
Fig. 1. Optimal-to-single mode energy ratio for jet in the air with velocity profile 1 (Fig. 2) Vs. position downstream z for m=1, η=0.001, ζ=0.01, Re = 1000. Curves correspond to ω =0.1, 0.2, 0.5
Non-modal stability of jet in the air (Fig. 1), velocity profile is shown in Fig. 2.
Fig. 2. Main flow velocity profile 1

20
Results: jet in the air, velocity profile 2
Fig. 1. Optimal-to-single mode energy ratio for jet in the air with velocity profile 2 (Fig. 2) Vs. position downstream z for m=1, η=0.001, ζ=0.01, Re = 1000. Curves correspond to ω =0.1, 0.2, 0.5
Non-modal stability of jet in the air (Fig. 1), velocity profile is shown in Fig. 2.
Fig. 2. Main flow velocity profile 2

21
Summary and conclusions
Ø Linear stability problem for spatially-developing disturbances in round viscous jet is formulated. The effects of surface tension and ambient gas are considered
Ø Numerical algorithm for modal and non-modal stability study is developed and validated
Ø Parametric study of optimal spatial disturbances to both immersed jet and jet in the air is carried out
Ø For the case of both jet flows, it is found that non-modal instability mechanism is strongest for non-axisymmetric disturbances (m>0) and it is damped with an increase in frequency of the disturbances. Maximum optimal-to-single mode energy ratio is of order of 102
Thank you for attention!

22
Ø Energy norm:
Energy norm and optimal spatial disturbances
( )WWVVUU
γγ***
****),(
++=
=++= ∫z
z
E
ErdrwwvvuuzE γ
{ })(exp)exp()(),,,(1
tmizikrtzr n
N
nnn ωθγθ −⎟
⎠
⎞⎜⎝
⎛= ∑
=
Ø Maximization of energy functional: 1,max:? 0
** =→− γγγγγ EΕzγ
Euler-Lagrange equations: 00 =+ EEz σ
Optimal disturbances correspond to eigenvector with highest eigenvalue σ
(Ez is positive Hermitian quadratic form)
(generalized eigenvalue problem for energy matrix)