CEJ - Mikrokator Priniciple

of 4
Transcript of CEJ - Mikrokator Priniciple
-
7/25/2019 CEJ - Mikrokator Priniciple
1/4
490
MISCELLANEOUS MECHANISMS
MISCELLANEOUS MECHANISMS
49
N under pawl L lifting it clear
of ratchetH.
When pawl
F
is released
from ratchet
G by cam
M
ratchets G
and H
turn
backward
through the
action of
spring
K
until
pin R
comes
in contact
with
l ev er N
and carries
it backward
i n t ime to
allow pawl L to drop and engage tooth No. 3
1
Thus
during
the third
revolution
of shaft B
the
ratchets and
cam
U
again
come into position
to
move lever V forward.
Should pin
R
be placed
in
hole
No.4
lever N would be
carried
back
from
under
pawl
b y p in
R
one
tooth
later
Fig . 1 2. Dia l C on tr ol
End
of
Mechanism Shown
in
Fig. 1 1 .
when
the ratchets
were
returned
by
spring K and
pawl
L
wo ul d e ng ag e t oo th No. 4
Lever V would then be moved
forward during
the
fourth
revolution
of
shaft B Should
pawl
fail
to engage any of
the
teeth
spring
would be
prevented
from
being unwound
by
a safety stop which is
just in front
of
the
end
of
pawl
L
on
the
vertical center line
F ig . 12. This stop prevents the pointer T
from
m ak in g a
complete revolution.
Pin R
is so arranged that
it
cannot be removed
from in
f r o n ~ of
lever N
f h e r ~ f o r e } f
hole No.2 is selected lever
N
wIll b e
carried
backward
during the
setting
and after
imparting the forward
movement
to
lever
V the
return
of
the ratchets will be s topped on t oo th N0.2
1
The
forward
movement of lever V will
then take
place
during
the second
revolution of
shaft
B
This mechanism can be designed
fo r
a
differentnumber
of t iming
pe ri od s b y d ivi di ng a cycle o f
the r t c h ~ t s into
one more division t han t he number of
timing
periods de
s ired and
proportioning
the
s tr ok e o f the connecting-rod
accordingly.
Amplifying Mechanism for Precision Measuring Instru
ment. A
movement-amplifying mechanism developed
to
transmit
movement
from
the contact
or
measuring point to
the indicating pointer of precision measuring instruments
has as
its
most
important part
a m et al strip of rectangular
c ro ss -s ec ti on w hi ch i s t wi st ed i nt o a h el ix
as
shown
A
and B
Fi g. 13. T hi s t wi st ed
part
o f u nu su al d es ig n
is
employed in instruments for taking precision measurements
of
length weight pressure electrical energy etc. which
require an amplifying unit
that
will operate
with
a mi ni
mum of frictional and energy loss and without back pres-
sure.
The mechanism described and illustrated is protected
patents
of Aktiebolaget
C E.
Johansson of Eskilstuna
Sweden.
It has
been employed in extensometers electro
cardiographs micro-monometers variometers
and surface
finish
testing
instruments.
The metal strip
A
F ig . 13 i s t wi st ed i nt o the required
helical
form
by fastening each end rigidly
and
winding
from
the c ent er . T he w in di ng o pe ra ti on i s co nt inu ed u nt il
th J
metal has..been formed sufficiently
to retain the
helical shape
permanently. When
the strip
twisted
in this manner
is held
at
each end
and
stretched
the
center of
the strip
will
l o t t ~
about an a xi s w hi ch i s
the
center of the cross-section of the
-
7/25/2019 CEJ - Mikrokator Priniciple
2/4
492
MISCELLANEOUS MECHANISMS
MISCELLANEOUS
MECHANISMS
493
strip., Actually, one end of
the
twisted
str ip is
held
in
a fixed
position, while
the other
end is attached
to
a lever or
crank
connected
with
the measuring point of the instrument,
as
shown
in
Fig . 14. The indicating pointer
P
is secured
to
the
center of
the
twisted s tr ip . With
this
arrangement the
indicating pointer will be moved over a graduated scale
when
the
measuring point at
the
lower end of member
is
moved.
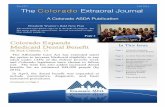
In the
case of the twisted solid strip Fig. 13,
the
metal
in the center of the section is compressed
in
winding, and
?
Fig.
13.
Two Types of Met al S tr ip , A and Indicating
o i ~ t e r
P,
and
Split
Tube Q
Used i n Amp li fy ing Mechani sm Shown i n Fig. 14.
elongated when
the str ip
i s s tr etched . To cor rect
this
con
dition, a series of perforations may be
cu t
out of
the
central
portion of
the
strip giving
it
the
form
at
B
Such a
strip
.requires less energy to operate and also gives a
greater
rota-
tive movement
with
a given tens ion on
the
strip
than the
one shown at A The relation between
the
cross-section of
the
strip elongation, pitch of winding, and
the
stretching
force required
to
produce rotation
has
been determined by
trying
different combinations of cross-section dimensions,
pitch of twist, and jsize
and
n.umber of perforations.
Within a certain range,
the
rotation of a strip about
it s
center is practically directly proportional
to the
elongation.
On one type of experimental strip
this
portion of
the
curve
covers a range of about 60 degrees. The rotation of the
strip within this range
is approximately 18 degrees
for
an
elongation of 0.00039 inch. Tests show
that
a force.of one
gram produces a rotat ion of 5 to 7 degrees.
Another strip which requi res a much lower opera ting
force and produces a much higher amplification gives such
a
high
rotative
or
amplifying effect
tha t i t
does
not
need to
be
perforated
if
used within a
range
of 145 degrees rota
tion.
By operating
force is
meant
the
force required to
hold
the
pointer
in
the
starting
or
zero position. The
latter
strip
is 0.0042 by 0.0002 inch
in
cross-section, 1.5748 inches
long,
and has
a
twist
of 2160 degrees.
By
varying
the
dimensions of
the
cross-section, length,
and pitch
of
the twist
in
the strip
it is possible
to
produce
many
different amplification ratios. The
strips
mentioned
are
only examples, and do not show
the
full possibilities of
their
use
in
amplifying mechanisms. The twisted str ips,
when properly mounted in
an
instrument,
are
surprisingly
strong.
The
elongating force or tension required
to
produce
rotation
of
the strip
about it s axis can be reduced
to
a mi
nute
fraction
of
the
amount normally required by balancing.
the
normal or initial tension with a permanent magnet.
The Mikrokator amplifying
and
indicating mechanism
shown in Fig . 14 is fit ted with a
strip
like
the
one shown
at
B
Fig. 13. Spindle Fig. 14, which carries
the
measur
ing point at
it s
lower end, is forced downward against stop
C by a coil spr ing. To provide a frict ionless support
fo r the
spindle at-1he lower end, it is fastened
to
a metal diaphragm
D This diaphragm is
cut
out, as shown by the plan view E
so
as
to provide maximum flexibility
and not interfere
with
the
free movement of the spindle.
-
7/25/2019 CEJ - Mikrokator Priniciple
3/4
9
MISCELLANEOUS MECHANISMS
MISCELLANEOUS MECHANISMS
495
The upper end of
the
spindle is fastened directly to
hori-
zontal spring F
and
the horizontal member of spring
knee
G
One end of t he twisted strip is fastened directly t o t he
vertical memberof springknee
G
The other end is fastened
Fig 14 Diagrams Showing Construction of Amplifying Mechanism
of Precision Gage
to the
adjustable spring support An
upward
movement
of the spindle will cause the vertical member of spring knee
G to move to the r ight . This movement of the spring knee
results in
an
elongation of the twisted strip and causes
pointer
P
fastened
to the
center of twisted strip B
to rotate
across the scale of the instrument Varying
the
height of
the
vertical
member
of
-
7/25/2019 CEJ - Mikrokator Priniciple
4/4