
Capacitive Interface Electronics for Sensing and Actuationboser/presentations/Capacitive Interface...
33
B. E. Boser 1 Capacitive Interface Electronics for Sensing and Actuation Bernhard E. Boser University of California, Berkeley [email protected] Capacitive Interface Electronics
Transcript of Capacitive Interface Electronics for Sensing and Actuationboser/presentations/Capacitive Interface...

B. E. Boser 1
Capacitive Interface Electronics
for Sensing and Actuation
Bernhard E. Boser
University of California, Berkeley
Capacitive Interface Electronics

B. E. Boser 2
Outline
• Capacitive Sensors
– Applications
– Displacement sensors
• Readout electronics
– Sensor interface
– Circuit topologies
– Electronic noise
• Feedback
– Electrostatic force feedback
– Stability
– Sigma-delta conversion
• Conclusions
Capacitive Interface Electronics

B. E. Boser 3
Applications
Capacitive Interface Electronics

B. E. Boser 4
flexture
anchor
N Unit CellsFixed Plates
Accelerometer
Capacitive Interface Electronics
2 2
1mG
2 10kHz
2.1
Angs5pm trom40
ax
π
acceleration

B. E. Boser 5
Gyroscope
Capacitive Interface Electronics
• Vibrate along drive axis with
oscillator @ fdrive
• Detect vibration @ fdrive
about sense axis with
accelerometer
20 fmtypx
Classical radius of
electron: 2.8 fm

B. E. Boser 6
Capacitive Displacement Sensors
Gap closing Overlap
Capacitive Interface Electronics
x
xo
x xo
oo
o
xC x C
x x
o
o
o
x xC x C
x
0
1 1
o o x
dC x
C dx x
1 1
o o
dC x
C dx x
Cap closing actuator has higher sensitivity

B. E. Boser 7
Capacitive Displacement Sensors
Gap closing
High sensitivity
Limited travel range
Nonlinear
Pull-in
Overlap
Capacitive Interface Electronics
x=20fm
xo=2mm
x=20fm
xo=20mm
20C 10 zF 10 Fo
Low sensitivity (large xo)
Large travel range
Linear (first order)
No pull-in (first order)
Co = 1pF Co = 1pF
21C 1 zF 10 Fo

B. E. Boser 8
Alternative Geometries
Capacitive Interface Electronics
Gap Closing Design • high sensitivity
• small travel range
Overlap Sensor Design • low sensitivity
• large travel range
Dis
pla
cem
ent
Compromise

B. E. Boser 9
Outline
• Capacitive Sensors
– Applications
– Displacement sensors
Readout electronics
– Sensor interface
– Circuit topologies
– Electronic noise
• Feedback
– Electrostatic force feedback
– Stability
– Sigma-delta conversion
• Conclusions
Capacitive Interface Electronics

B. E. Boser 10
Capacitance to Voltage Conversion
Capacitive Interface Electronics
A A
x
Anchor
AA
x = 0
x > 0
t
L
N movable fingers
x0+x
sense capacitor Cs reference capacitor Cref
+Vs = 1V
-Vs = -1V
Vx =Vs C/Co = 10 nV
Cs1 = Co + C
Cs2 = Co - C
Co = 1 pF
C = 10 zF
• maximize C
• minimize Co
• maximize Vs

B. E. Boser 11
Parasitics
Capacitive Interface Electronics
Cs1
Cs2
substrate shield
ParasiticElements

B. E. Boser 12
Capacitive Transducer Interface
Capacitive Interface Electronics

B. E. Boser 13
Interference
Capacitive Interface Electronics
B. E. Boser 14
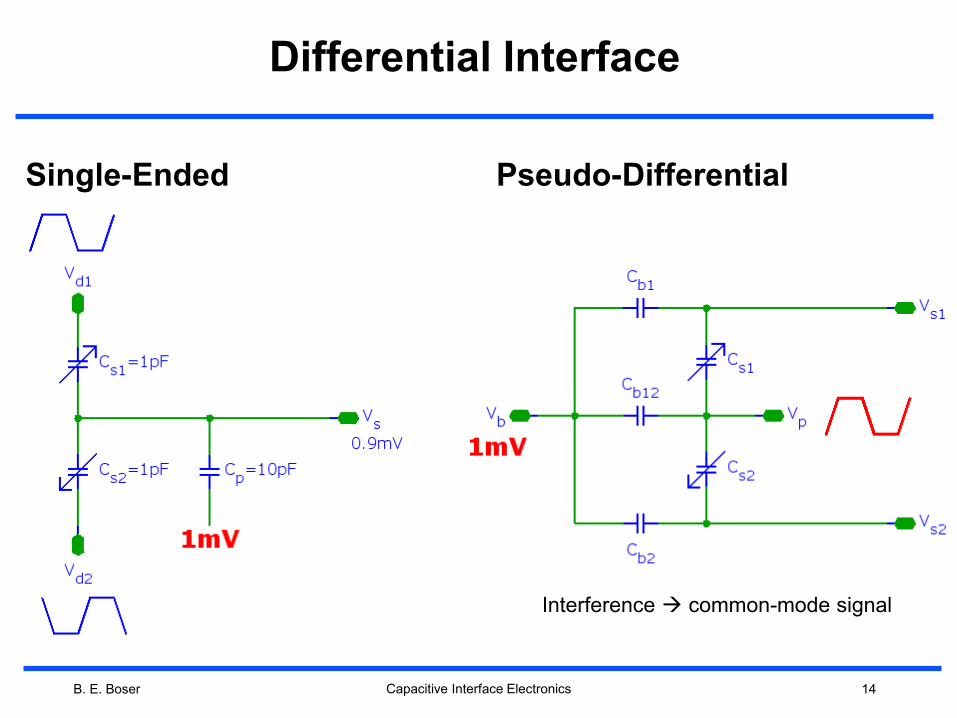
Differential Interface
Single-Ended Pseudo-Differential
Capacitive Interface Electronics
Interference common-mode signal

B. E. Boser 15
Modulation
Capacitive Interface Electronics
• Low frequency acceleration signal
– Subject to low-frequency interference
E.g. 1/f noise
– Capacitors do not pass DC
• Solution: modulate signal before it can be corrupted

B. E. Boser 16
Modulation in 2-Chip Sensors
Capacitive Interface Electronics
Reject drift in bond-wire capacitance
Sense Voltage Modulation
Ref: Lang et al, Cancelling low frequency errors in MEMS systems, 2009.

B. E. Boser 17
Mechanical Modulation
Capacitive Interface Electronics
Ref: P. Lajevardi, V.P. Petkov, and B. Murmann, "A ΣΔ Interface for MEMS Accelerometers using Electrostatic Spring-
Constant Modulation for Cancellation of Bondwire Capacitance Drift," in Digest ISSCC 2012, pp. 196-197.

B. E. Boser 18
Capacitive Interface Circuits
Continuous Time Sampled Data
Capacitive Interface Electronics
• Output modulated
• High valued bias resistor
• No bias resistor, direct interface to ADC
• Noise folding

B. E. Boser 19
Noise Folding
Capacitive Interface Electronics

B. E. Boser 20
“Boxcar” Sampling
Capacitive Interface Electronics
• ~ 10dB noise / power reduction possible
• sensitive to clock jitter & nonlinearity

B. E. Boser 21
Outline
• Capacitive Sensors
– Applications
– Displacement sensors
• Readout electronics
– Sensor interface
– Circuit topologies
– Electronic noise
Feedback
– Electrostatic force feedback
– Stability
– Sigma-delta conversion
• Conclusions
Capacitive Interface Electronics

B. E. Boser 22
Electrostatic Force Feedback
Benefits:
• Reduced sensitivity to transducer
nonlinearity
• Increased bandwidth (gyroscopes)
Challenges:
• Need accurate feedback force
• Stability
• Increased noise
Capacitive Interface Electronics
A ain Vout
F
S +
-

B. E. Boser 23
Scale Factor
Openloop Feedback
Capacitive Interface Electronics
2 2s s
out
o or r
x
C
V Vx dC xV
dx C x
2
ADC output scale factor
ˆo r ox D x
Vs
xcell ADC out
o
s
VD
V
2
acceleration force
feedback force
1
2fb
dCV mx
dx
21ˆ2
fbdC Vx
dx m
• Final measurement depends on
absolute voltage
• Need precision reference for good
scale factor accuracy
• Feedback is nonlinear

B. E. Boser 24
Stability
Challenges:
• 2nd order system
• High Q 180o phase lag at resonance
• Higher order resonances
• Additional loop delay (e.g. DAC)
Capacitive Interface Electronics
typical high
performance gyroscope
frequency response
Sense mode
“Parasitic” modes

B. E. Boser 25
Feedback Actuator
Non-Collocated
separate electrodes for
sense and feedback
Collocated
same electrodes for
sense and feedback
Capacitive Interface Electronics
Frequency
(Hz)
Normalized
Magnitude
(dB)
Phase
(°)
Frequency
(Hz)
Normalized
Magnitude
(dB)
Phase
(°)
Frequency
(Hz)
Normalized
Magnitude
(dB)
Phase
(°)
Frequency
(Hz)
Normalized
Magnitude
(dB)
Phase
(°)
Stabilize with lead compensator?

B. E. Boser 26
Sampled Data System Loop Gain
Capacitive Interface Electronics

B. E. Boser 27
Frequency
(kHz)
Magnitude
(dB)
Phase
(°) Small But
Enough
Margin Huge Positive
Margins
Frequency
(kHz)
Magnitude
(dB)
Phase
(°) Small But
Enough
Margin Huge Positive
Margins
Positive Feedback
Capacitive Interface Electronics
stable
DC gain < 0

B. E. Boser 28
Sigma-Delta A/D Conversion
Capacitive Interface Electronics
• Very low overhead: only comparator (and 1-bit DAC)
• Sensor acts as loop filter
• Or so it seems …
x x̂

B. E. Boser 29
Broad-band Noise
Capacitive Interface Electronics
ONLY Electronic Noise
ONLY Quantization Noise
Quantization + Electronic Noise
Inp
ut
Noise
Frequency
Po
we
r
B. E. Boser 30
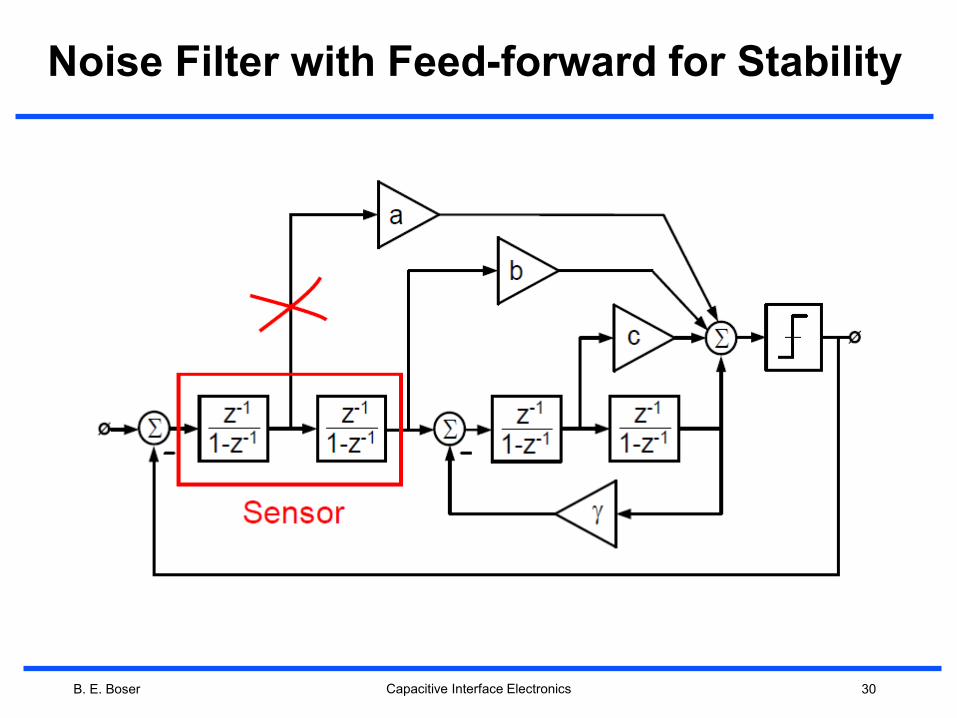
Noise Filter with Feed-forward for Stability
Capacitive Interface Electronics

B. E. Boser 31
Lead Compensator
Capacitive Interface Electronics

B. E. Boser 32
Outline
• Capacitive Sensors
– Applications
– Displacement sensors
• Readout electronics
– Sensor interface
– Circuit topologies
– Electronic noise
• Feedback
– Electrostatic force feedback
– Stability
– Sigma-delta conversion
Conclusions
Capacitive Interface Electronics

B. E. Boser 33
Conclusions
• Capacitive sensor interfaces can resolve
femto-meter displacements
• Challenges
– Transducer:
• Parasitic capacitance, resistance
• Interference pseudo differential interface
• Nonlinearity
– Electrostatic Force-Feedback
• Scale-factor sensitivity to absolute voltage
• Stability: 2nd order system, parasitic resonances
• Sigma-delta ADC: noise enhancement
Capacitive Interface Electronics


















