Bet 01

of 9
-
Upload
sheharyar-khan -
Category
Documents
-
view
218 -
download
0
Transcript of Bet 01
-
8/3/2019 Bet 01
1/9
Smooth is Better than Sharp: A Random Mobility Model forSimulation of Wireless NetworksChristian Bettstetter*
T e c h n i s c h e U n i v e r s i t & t M 0 n c h e nI n s t i t u t e o f C o m m u n i c a t i o n Networks
D-80290 M u n i c h , G e r m a n [email protected] B S T R A C TT h i s p a p e r p r e s e n t s a n e n l i a n c e d r a n d o m m o b i l i t y m o d e lfor s im u la t io n-b a se d s tudie s of w i re le ss ne tworks . Our a p-p r o a c h m a k e s t h e m o v e m e n t t r a c e o f i n d i v i d u a l m o b i l e s t a -t i o n s m o r e r e a l i s t i c t h a n c o m m o n a p p r o a c l i e s f o r r a n d o mm o v e m e n t .A f t e r g i v i n g a s u r v e y o f m o b i l i t y m o d e l s f o u n d i n t h e l i t-e r a t u r e , w e g i ve a d e t a il e d m a t h e m a t i c a l f o r m u l a t i o n o f o u rm o d e l a n d o u t l i n e it s a d v a n t a g e s . T i l e m o v e m e n t c o n c e p t i sb a s e d o i l r a n d o m p r o c e ss e s f or s p e e d a n d d i r e c t i o n c o n t r o l i nwhic h t i l e ne w va lue s a re c or re la te d to pre vious one s . Upona spe e d c ha nge e ve nt , a ne w ta rge t spe e d i s c hose n , a nd oJ~a c c e le ra t ion i s s e t to a c hie ve th i s t a rg e t spe e d . T i l e pr inc i -p le s for a d i r e c t ion c l i a nge a re sim i la r . More ove r , we pro-p o s e t w o e x t e n si o n s f o r m o d e l i n g t y p i c a l m o v e m e n t p a t t e r n sof ve hic le s . F ina l ly , we c ons ide r s t r a te g ie s for the node s 'b o r d e r b e h a v i o r ( i .e ., w l i a t h a p p e n s w h e n n o d e s m o v e o u to f t i l e s i m u l a t i o n a r e a ) a n d p o i n t o u t a p i t f a l l t h a t o c c u r sw h e n u s i n g a b o u n d e d s i m u l a t i o n a r e a .KeywordsW i r e l e s s a n d m o b i l e c o m m u n i c a t i o n n e t w o r k s , I n o d e l i n g a n ds i m u l a t i o n , m o b i l i t y m o d e l i n g , u s e r m o v e m e n t , r a n d o m d i -r e c t i o n m o d e l , r a n d o m w a y p o i n t m o d e l , b o r d e r e f f ec t s.
1 . INTRODU CTION AND MOTIVATIONT h e m o v e m e n t p a t t e r n o f u s e r s p l a y s a n i m p o r t a z l t r o l ein pe r form a nc e a na lys i s of m obi le a nd w i re le s s ne tworks :In c e l lu la r ne tworks , for e xa m ple , a use r ' s m obi l i ty be ha v-ior d i r e c t ly a f f e c t s t i l e s igna l ing t r a f f i c ne e de d for l i a ndove ra n d l o c a t i o n m a n a g e m e n t ( l o c a t i o n u p d a t e s a n d p a g i n g ) [9 ].
* T h i s w o r k i s f u n d e d b y t h e G e r m a n R e s e a r c h F o u n d a -t i o n D F G w i t h i n t h e p r o g r a m " A d a p t a b i l i t y i n h e t e r o g e n o u sc o m m u n i c a t i o n n e t w o r k s w i t h w i r e le s s a cc e ss ( A K O M ) . "
Permission to make digital or hard copies of all or part of this work forpersonal or classroom use is granted without fee provided tha tcopies are not made or distributed for profit or commercial advan-tage and that copies bear this notice and the full citation on the first page.To c0py otherwise, to republish, to post on servers or toredistribute to lists, requires prior specilic permission and/or a fe e,MSWiM 2001 7/0 1 Rome, Italy 2001 ACM ISBN 1 -58113 -378 -2 /01 /07_ .$5 .00
Ti le e x t r a s igna l ing m e ssa ge s ove r the a i r in te r f a c e c onsum er a d i o r e s o u r c e s a n d i n c r e a s e t i l e a s s o c i a t e d d a t a b a s e q u e r yl o a d . I l l a d d i t i o n , m o b i l i t y h a s m a j o r e f fe c t o n t h e c h a n n e lhold ing t im e h i c i r c u i t - sw i tc l i e d s e rv ic e s ( s e e e . g . [19 , 14 ,35 , 11] ). T i l e l a t t e r ha s i l l tu r n hu ge inf lue nc e on t il e ca l lb loc kin g a nd dro ppin g prob a bi l i t y ( s e e e . g. [30 , 23] ) .T i l e m o d e l i n g o f a u s e r ' s m o v e m e n t i s t h u s a n e s s e n t i a lb u i l d i n g b l o c k i n a n a l y t i c a l a n d s i m u l a t i o n - b a s e d s t u d i e s o ft h e s e s y s t e m s . M o b i l i t y m o d e l s a r e n e e d e d i l l t h e d e s i g n o fs t r a t e g i e s f o r l o c a t i o n u p d a t i n g a n d p a g i n g , r a d i o r e s o u r c em a n a g e m e n t ( e. g. , d y n a m i c c h a n n e l a l lo c a t i o n s c h em e s ) ,a nd t e c hnic a l ne twork p la nin g a nd de s ign ( e .g. , c el l a nd lo-c a t i o n a r e a l a y o u t, n e t w o r k d i m e n s i o n i n g ) . T h e c h o ic e o ft i l e m obi l i ty m ode l ha s a s igni f i c a nt e f f e c t o l l the obta ine dre sul t s . I f the m od e l i s unre a l i s t i c , inva l id c onc lus ions m a yb e d r a w n .W i t h t i l e i n c r e a s i n g n u m b e r o f s u b s c r i b e r s a n d t h e d e -c re a s ing c e l l s i z e in fu ture c e l lu la r sys te m s , the m obi l i typ a t t e r n o f us e r s w i ll e v e n m o r e i n f l u e n c e t h e p e r f o r m a n c e o ft i l e ne twork . Sm a l le r c e l l s r e su l t i l l a l l inc re a se d m o bi l i ty-r e l a t e d s i g n a l in g l o a d a m d i n o r e d a t a b a s e q u e r ie s . M o d e l st h a t p r o v e d t o b e a g o o d c h o i c e i n s i m u l a t i o n o f m a c r o -c e l lu l a r e n v i r o n m e n t s s h o w s o m e d r a w b a c k s w h e n b e b t g a p -p l i e d i l l m ic ro- a m d p ic o-c e l lu la r e nvi ronm e nts [23 , 39] .
M o b i l i t y m o d e l i n g a l s o p l a y s a n i m p o r t a n t r o l e i n a n a l -ys i s of a lgor i thm s a nd pro toc ol s in w i re le s s loc a l a re a ne t -w o r k s ( W L A N s ) a n d s e l f - o r g a n i z i n g w i r e l e s s a d h o c n e t -w o r k s. W h e r e a s i n c e l lu l a r n e tw o r k s t h e r e e x i s t s a n u m b e ro f a p p r o a c h e s t l i a t m o d e l t h e m a c r o s c o p i c m o v e m e n t b e h a v -ior of use r s ( e . g . , r a ndom wa lk f rom c e l l to c e l l , de sc r ip t ionof the c e l l r e s ide nc e t im e ) , in the se c a se s we ne e d a "m ic ro-sc opic " m ode l .Thi s pa pe r pre se nt s suc h a m ode l . I t c a l l be use d i l l s im -u l a t i o n s o f m o b i l e a n d w i r e l es s n e t w o r k s i n w h i cl i t h e i n d i -v i d u a l m o v e m e n t b e h a v i o r o f u s e r s s h o u l d b e r e f le c te d . W ee m p l o y a c o m b i n a t i o n o f p r i n c ip l e s f o r d i r ec t i o n a n d s p e e dc ont ro l t ha t m a ke th e m ove m e ~ t t of use r s ( e .g . , pe de s t r i -a n s a n d c a r s ) m o r e s m o o t h a n d r e a l i s t i c t h a n i l l p r e v i o u s l yk n o w n r a n d o m m o d e l s . N e v e r t h e le s s , t h e m o d e l d e s c r i p t i o na n d i m p l e m e n t a t i o n a r e s t il l v e ry s iJ n p le . W e d e n o t e t h i sm o d e l b y Smooth Random Mobility Model.Th e re m a ind e r of th i s pa pe r i s orga niz e d a s fo llows: InSe c t ion 2 we m a ke a n a pproa c h to c la s s i fy m obi l i ty m ode l suse d by r e se a rc he r s in t i l e w i re le s s ne tworking a nd m obi lec o m p u t i n g c o m m u n i t y . W e d e s c r i b e s o m e c o m m o n l y u s e dm o d e l s a n d t h e i r a p p l i c a t i o n a n d d e r i v e a " c o n c e p t m a p "for m ob i l i ty m ode l s . In the fo l lowing, we pre se nt our e n-
19
-
8/3/2019 Bet 01
2/9
f l u i d l o w ]r - - - I a g g r e g a t e dm o v e m e n t[ a n a l y t ic a l d e s c r i p t io n [ [ m i c r o m o b i li ty [ [ [ b e h a v i o r J L g r a v i ty / tr a n s p o r t ]
L M - - - I ind iv idua l eser~
i i ii i i! ~ i ~ i ~ i i i i ii i ~ N . . . . . ~ " d im e n s i o n [ r a n d o m w a lk ] { deleterepiaceandd e g r e e o f r a n ~ oo m ne ss I ~ l - ~ ~ w r a p -a ro u n d[ I b o u n c e back[
I d e t e r m i n is t ic h y b r i d r a n d o ma p p r o a c h a p p r o a c h m o b i l it y m o d e l [::i::i::i::i::iiil:iii::i~ ~ iiii::::::i::i::ii!ii::i::it/determinism in c h o c ~ e d ~ s t i n a t io n n e e d e d o rII I I ~ /I r e a ' m o b " " y tr a e e [ a e e d o m a i n [ I i m e d o m a l n [ e h o n s e I I c h ep o i n t d i r e c t i o n
I s t r e e t ,o f f i c e m o v e m e n t e v e n t r i g g e r e d n e e d e c l f o r / n e e d e d o rbo unded by environment mov ement ~ ~i , I J c h a n g e p e e d I c h a n g e d i r e c t i o n, ~ 1 method methodJ c h a n g e p e e d ~ ' ~ ;~m o d e l I ~he , ~ t o c h a , ~ g e ? ' ~w h e n o c h a n g e ?[ - - ~ / I I I II predefined I p r o b a b i li s ti c I - ' ~ I o r ) d e f in e d I p r o b a b i lis t ic/I b o r d e r f c e l l ,i m ' a r e a ~ I [ b o r d e r f c e l l ,sim. a r e a , .. I
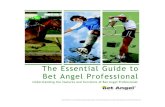
F i g u r e 1 : C o n c e p t m a p o f m o b i l i t y m o d e l s u s e d i n s im u l a t i o n a n d a n a l y s i s o f w i r e le s s c o m m u n i c a t i o n s y st e m s
h a n c e d m o d e l a n d o u t l i n e i t s a d v a n t a g e s. S e c t io n 3 g i v es am a t h e m a t i c a l f o r m u l a t i o n o f t i le m o v e m e n t p r i n c ip l e s . W ed e s c r i b e i n d e t a i l h o w t o m o d e l t h e s p e e d a n d d i r e c t i o nb e h a v i o r o f m o b i l e s ta t i o n s . F u r t h e r m o r e , w e p r o p o s e t w oe x t e n s i o n s , w h i c h m o d e l t y p i c a l m o v e m e n t p a t t e r n s o f v e -h ic les . Se c t ion 4 de sc r ibe s d i f f e re nt a ppro a c he s for bor de rb e h a v i o r , i . e . , w h a t t o d o i f n o d e s m o v e o u t o f t h e s y s t e mp l a n e . I n p a r t i c u la r , w e c o n s i d er t h e i m p a c t o f t h e b o r d e rb e h a v i o r o n t h e s p a t i a l u s e r d i s t r i b u t i o n i n a l i m i t e d s i m u -la t ion p la ne . He re , we poin t out a p i t f a l l : Us ing the wrongb o r d e r b e h a v i o r c a n l e a d t o i n c o r r e c t s i m u l a t io n r e s u l t s . F i -n a ll y , S e c ti o n 5 s u m s u p t i le m a i n f e a t u r e s o f o u r m o d e l a n dc o n c l u d e s t h i s p a p e r .
2 . M O B I L I T Y M O D E L ST h e r e e x i s ts a v a r i e t y o f m o b i l i t y m o d e l s t h a t f i n d a p p l i -c a t i o n i n d i f f e r en t k i n d s o f s i m u l a t i o n s a n d a n a l y t i c a l s t u d i e sof w i re les s sys te m s . F ig . 1 shows a c onc e p t m a p i l lus t r a t ings o m e c r i t e r i a w h i c h c a n b e u s e d f o r c a t eg o r i z a t i o n .A n a l y t i c a l m o b i l i t y m o d e l s a r e i n g e n e r a l b a s e d o n r a t h e r
s i m p l e a s s u m p t i o n s r e g a r d i n g t h e m o v e m e n t b e h a v i o r o fu s e r s , b u t t h e y a l l o w t o c a l c u l a t e m a t h e m a t i c a l e x p r e s s i o n sw i t h r e s p e c t t o s y s t e m p e r f o r m a n c e . S e v e r a l a u t h o r s d e r i v ethe d i s t r ib ut io n of a use r ' s c e l l r e s ide nc e t im e [19, 45 , 44 ,331. For e xa m ple , Zonooz i a nd Da ssa na ya ke [44] show tha tt i le c e ll r e si d e n c e t i m e w i t h t h e i r m o d e l c a n b e d e s c r i b e d b ya g e n e r al i z e d g a m m a d i s t r i b u t i o n . C o m b i n i n g t h e s e "too-
b i l i t y m e t r i c s " w i t h t r a f f ic m o d e l s a l l o w s t o e s t i m a t e i m p o r -t a n t s y s t e m p e r f o r m a n c e p a r a m e t e r s , s u c h a s c h a n n e l h o ld oi n g t i m e a n d h a n d o v e r a n d l o c a t i o n u p d a t e e v e n t s [ 1 9 , 1 4 ,34, 44}.L e t u s b r i e f l y d e s c r i b e t h e m o b i l i t y a s s u m p t i o n s u s e d b yt h e s e a u t h o r s . H o n g a n d R a p p a p o r t [ 19 ] a s s u m e t h a t m o -bi l e use r s a re uni form ly d i s t r i but e d ove r a c el l . Ea c h use rc h o o s e s a d i r e c t i o n ~ ( t a k e n f r o m a u n i f o r m d i s t r i b u t i o n[ 0 . . . 2 7 r[ ) a n d a s p e e d v ( u n i f o r m l y d i s t r i b u t e d o n t h e i n -t e rva l [0 . . . v , na = ] ) . Onc e the se va lue s a re c hose n , the y r e -m a i n c o n s t a n t u n t i l t h e u s e r c r o s s es t h e b o u n d a r y o f t h e c e ll .Gudr in [14] use s a m ore ge ne ra l m ode l , in whic h d i r e c t ionc ha nge s a re a lso pos s ib le w i th in a c el l . Th e m od e l in [44]a l lo w s d i r e c t i o n c h a n g e s o n l y t o a c e r t a i n e x t e n t ( = t : A ~ ,~ = ) .L in , Fa ng, a z ld C hla m ta c [31 , 12] a s sum e a ge ne ra l ly d i s -t r i b u t e d l o c a t i o n a r e a r e s id e n c e t i m e a s g i v e n. F r o m t h i s ,t h e y d e r iv e t h e p r o b a b i l i t y d i s t r i b u ti o n o f t h e n u m b e r o floc a t ion a re a c ros s ings for a g ive n d i s t r ib ut io n of the in te r -s e rv ic e t im e ( i . e . , t i l e t im e be twe e n t i l e be ginning of twose rve d (unbloc ke d) c a l l s ) .A n o t h e r a n a l y t i c a l m o d e l i s t h e B r o w n i a n m o b i l i t y m o d el .I t m o d e l s t h e m o v e m e n t o f u s e r s b a s e d o n B r o w n i a n m o t i o n ,s u c h t h a t w e caz~ c a l c u l a t e t h e p r o b a b i l i t y d i s t r i b u t i o n o f t h ep h y s i c a l l o c a t i o n o f a u s e r a t a g i v e n t i m e t , p r o v i d e d t h a twe know hi s or he r Loc a t ion a t a pre vious t im e to < t . Le ia nd Rose use suc h a m o de l i zl one d im e ns io n [29] a nd in twodim e ns ions [28 } .M o d e l s u s e d f o r s i m u l a t i o n - b a s e d s t u d i e s d e s c r i b e t h em o v e m e n t o f u s e r s i n a m o r e d e t a i l e d m a n n e r . O n t h e o t h e r
2 0
-
8/3/2019 Bet 01
3/9
ha nd, h i ge ne ra l , the y do r io t a l low to de r ive a na ly t i c a l e x-pre s s ions .F o r e x a m p l e , t h e E u r o p e a n T e l e c o m m u n i c a t i o n s S t a n -d a r d s I n s t i t u t e ( E T S I ) d e f i n ed a s e t o f t e s t s c e n a r i o s fo rs y s t e m s b r i u l a t i o n o f U M T S ( U n i v e r s a l M o b i l e T e l e co m m u -n i c a t i o n S y s t e m ) . T h e d o c u m e n t [1 0] d e s c r i b e s m o b i l i t ym o d e l s f o r t h r e e e n v i r o n m e n t s : a n i n d o o r o ff ic e, a n o u t d o o rp e d e s tr i a m , a r id a v e h i c u l a r e n v i r o n m e n t . T h e m o d e l f o rt h e o u t d o o r p e d e s t r i a n e n v i r o n m e n t u s es a M a n h a t t a n - l i k es t r e e t s t r u c t u r e ( r e c t a n g u l a r g r id ) . P e d e s t r i a n s w a l k al o n gs t r e e t s i n a s t r a i g h t l i n e a r id c a n c h a n g e t h e i r d i r e c t i o n a t i n -t e r se c t ions w i th a g ive n proba bi l i ty . A lso spe e d c ha nge s a rep o s s i b l e a f t e r g i v e n i n t e r v a l s . T h e m o d e l f o r t h e v e h i c u l a re n v i r o n m e n t i s a r a n d o m m o b i l i t y m o d e l w i t h o u t a s t r e e ts t r u c t u r e . C a r s m o v e w i t h c o n s t a n t s p e e d ( v = 1 2 0 k i n / h )a r id c a r t c ha nge the i r d i r e c t ion e ve ry 20 m (wi th a proba -b i l i ty of 20%) . Only d i r e c t ion c ha n ge s of up to +45 a reposs ib le .Jugl a r id B o c he [4] e x te nd .ETSI ' s m o de l to ge t m ore r e -a l i st i c r e s u lt s . T h e y a n a l y z e m o b i l i t y - r e l a t e d p a r a m e t e r s o fthe i r m ode l , suc h a s the c e l l r e s ide nc e t im e a z id the c e l lb o u n d a r y c r o s s i n g r a t e , i n c o m p a r i s o n t o E T S I ' s m o d e l .Fur the rm ore , in [23], Jugl inve s t iga te s th e inf lue nc e of theu s e r s ' m o b i l i t y b e h a v i o r o n t h e c h a r a c t e r i s t i cs o f h a n d o v e rt r a f f i c , b loc king proba bi l i ty , s igna l ing t r a f f i c , a nd the c a pa c -i t y h i C D M A s y s t e m s .Le t us now c ons ide r the d i f f e re nt l e ve l s of de ta i l in m o-bi l i ty m ode l ing . Re se a rc he r s in ve hic u la r tr a f f i c the o ry d i s -t ingu i sh be twe e n th re e l eve l s of de sc r ip t ion : m ic rosc opic ,m e sosc opic (k ine t i c ) , a r id m a c rosc opic . A m ic rosc opic m ode lde sc r ibe s the m ove m e nt of a s ingle ve hic le by i t s spa c e a r ids p e e d c o o r d i n a t e s a t a g i v e n t i m e t . S u c h a p p r o a c h e s i n c l u d eve ry de ta i l e d "c a r fo l lowing" m od e l s [13]. A t th e m e sosc opicl e ve l , t h e h o m o g e n i z e d m o v e m e n t b e h a v i o r o f s ev e r a l v eh i -c le s i s r e f l e c te d . For e xa m ple , a d i s t r ibut ion func t ion i s de -r i v e d t h a t d e s c r i b e s t h e n u m b e r o f v e h i c l e s w i t h a c e r t a i nl o c a t i o n ( x , y ) o r s p e e d v a t t i m e t . W h e n m o d e l i n g o n am a c rosc opic s c a le , one i s in te re s te d e .g . in the de ns i ty , m e a nspe e d a r id spe e d va r ia nc e , a nd t r a f f i c f low of ve hic le s .A r c e x a m p l e f o r a m a c r o s c o p i c m o v e m e n t m o d e l u s e d i na na lys i s of w i re le s s sys te m s i s the f lu id f low m od e l [43]. Th i sf a m i l y o f a n a l y t i c a l m o d e l s d e s c r i b e s t h e m o b i l i t y i n t e r m so f " t h e m e a n n u m b e r o f u se r s cr o s s in g t h e b o u n d a r y o f ag ive n a re a . "A s e c o n d a p p r o a c h u s e d f o r m o d e l i n g t h e m a c r o s c o p i cm o v e m e n t b e h a v i o r i s t h e f a m i l y o f g r a v i t y m o d e l s [ 2 7 ] .T h e y a r e al s o d e r i v e d f r o m t r a n s p o r t a t i o n t h e o r y . S u c hm o d e l s g i v e a n a g g r e g a t e d d e s c r i p t i o n o f t h e m o v e m e n t o fse ve ra l use r s ( a s the f lu id m ode l ) ; the y r a nge f rom c i ty s c a let o i n t e r n a t i o n a l s c al e . T h e a u t h o r s i n [ 3 2 ] d e s c r i b e s u ch am ode l . The y use the c onc e p t of t r ips , a r e a a r id t im e z ones ,popula t ion groups , a r id so on . The pa pe r [41] a l so f a l l s in tot h i s c a t eg o r y . I t m o d e l s t h e d a i l y m o v e m e n t o f u se r s u s i n ga n a c t i v i t y - b a s e d t r a ve l d e m a n d m o d e l.A n o t h e r f r e q u e n t l y u s e d a p p r o a c h i n c e l l u l a r n e t w o r k s i st h e f a m i ly o f r a n d o m w a l k m o d e ls , a l so d e n o t e d a s M a r k o -v i a n m o b i l i t y m o d e l s. T h e y d e s c r i b e t h e m o v e m e n t o f i n -d iv idu a l use r s f rom c e ll to c el l. Not t he e xa c t loc a t io n ofa use r i s of in te re s t but jus t the c e l l in whic h he / s i r e r e -s i de s . T h e m o d e l i s b a si c a l ly d e f in e d b y a s t a t e - t r a n s i t i o nd i a g r a m i n w h i c h a c e l l i s r e p r e s e n t e d b y a s t a t e a n d t h em o v e m e n t s b y t r a n s i t i o n p r o b a b i l i t i e s b e t w e e n t h e s t a t e s .A use r e i the r s t a ys w i th in h i s /he r c e l l o r m ove s to or ie of
i t s ne igh bor in g c e l l s w i th a c e r ta in proba bi l i ty . A typic a lr a n d o m w a l k m o d e l i n o n e d i m e n s i o n i s d e s c r i b e d i n [ 3 ] .T w o d i m e n s i o n a l r a n d o m w a l k m o d e l s a r e u s e d e . g . i n [ 1 ,6 , 4 0 ]. R e c e n t e n h a n c e m e n t s i n c l u d e a r a n d o m w a l k m o d e lp r e s e n te d b y A k y i l d iz a n d L i n e t al . [2] . F rom the se m ode l swe c a n a l so de r ive a na ly t i c a l m e a sure s for the c ros s ing r a te sof c e l l a r id loc a t ion a re a bounda r ie s a r id a l ike [42] .I n t h e r e m a i n d e r o f t h i s p a p e r w e f o c u s o n m i c r o - m o b i l i t ym ode l s . The re e x i s t s a va r ie ty of ge ne ra l i z a t io ns of t i l em o d e l b y G u 6 r i n [ 14 ] t h a t a r e u s e d i n s i m u l a t i o n - b a s e d s t u d -ie s of w i re le ss sys te m s . B a s ic a l ly th i s c la s s c ar l be de sc r ibe da s fo llows: Use r s c a n m ove f r e e ly a nywhe re in the sys te ma re a . Th e va lue s for the use r ' s d i r e c t ion T a re t a ke n f roma ur f i form di s t r ibut ion on the in te rva l [0 . . . 27 r [ , i . e . use r sd o n o t h a v e a n y p r e f e r re d d i r e c ti o n . T h e s p e e d v a l u e s vfo l low , for e xa m ple , a uni form di s t r ibut ion or a norm a l d i s -t r i b u t i o n [ 1 6]. A f t e r a r a n d o m l y c h o s e n t i m e , t a k e n f r o m a ne x p o n e n t i a l d i s t r i b u t i o n , t h e u s e r c h o o s e s a n e w d i r e c t i o n .T h e s a m e p r o c e d u r e i s p e r f o r m e d f o r sp e e d c h a n g es . T h es toc ha s t i c proc e s se s for d i r e c t ion a r id spe e d c ha nge a re inge ne ra l r io t c or re la te d to e a c h o the r [16]. A nod e i s the re forec om ple te ly de ~ 'c r ibe d by i t s c ur re nt spa c e ve c tor ( x ( t ) , y ( t ) ) ,i t s c u r r e n t s p e e d v ( t ) , a n d i t s c u r r e n t d i r e c t i o n T ( t ) ; w h e r e0 < x < xm ~x mi dO
-
8/3/2019 Bet 01
4/9
A d e t e r m i n i s t i c a p p r o a c h f o r s i m u l a t i o n s w o u l d b e t o a l -l o w u s er s t o m o v e o n l y o n a p r e d e f in e d m o b i l i t y p a t h ( t y p e3 ) . S u c h a p a t h c a n d e s c r i b e t y p i c a l m o v e m e n t p a t t e r n s o fpe de s t r i a s l s a nd ve hic le s . We c a n d i s t ingui sh two c a se s . Int i l e f i r s t c a se , t i l e d i r e c t ion a nd spe e d a re both g ive n , a nd nor a n d o m p r o c e s s is i n c o r p o r a t e d a t a l l. I n t h e s e c o n d ca s e,t i l e d i r e c t ion t r a c e i s g ive n but t i l e spe e d i s c hose n r a ndom ly.Note tha t suc h t r a c e s c a n e xi s t in d i f f e re nt l e ve l s of de ta i l( c e ll s , a r e a s , e t c . ). La in , C ox, a n d W ido m [27 ] de sc r ibe af a m i l y o f m a c r o s c o p ic m o b i l i t y m o d e l s b a s e d o n t r a c e s . N e v -e r the le s s , s inc e t r a c ing t t l e a c tua l m obi l i ty be ha vior of use r si s a v e r y c o m p l i c a t e d t a s k a n d u s u a l l y s u c h i n f o r m a t i o n i sh a r d t o o b t a i n f r o m n e t w o r k p r o v i d e r s , r e s e ar c h e r s o f te n u s er a n d o m m o d e ls .La s t b ut no t l e a s t , w i re le s s r e se a rc he r s a l so inve n te d m od-e ls fo r t h r e e - d i m e n s i o n a l m o v e m e n t . T i l e a u t h o r s o f [ 24 , 2 5,2 6 ] m o d e l u s e r m o v e m e n t s i n b u i l d i n g s , i n c l u d i n g v e r t i c a lm o v e m e n t s i n s t a i r c a s es a n d e l e v a t o r s.
3 . A N E N H A N C E D R A N D O M M O B I L I T YM O D E L
In t i l e l a s t s e c t ion we ha ve s e e n a va r ie ty of e x i s t ing a p-p r o a c h e s t h a t a r e u s e d t o m o d e l t i l e m o b i f i t y o f u s e r s i nw i r e l e s s n e t w o r k s . T h i s s e c t i o n p r e s e n t s o u r e n h a n c e d m o -b i l i t y m o d e l , w h i c h w e d e n o t e a s S m o o t h Ra n d o m M o b i l i t ymodel. W ith r e spe c t to F ig . 1 , i t c a n b e c la s si f i e d a s fo llows:I t i s a r a n d o m m o b i l i t y m o d e l f o r m o v e m e n t i n t w o d i m e n -s ions on a m ic rosc opic s c a le . A ne w de s t ina t ion i s c hose n byd i r e c t i o n ~o. T h e s p e e d a n d d i r e c t i o n c h a n g e a r e b o t h p r o b a -b i l is t ic . T i l e m o v e m e n t o f n o d e s is n o t b o u n d e d b y p h y s i c a ls t r u c t u r e s ( s u c h a s s t r e e t s , b u i ld i n g s , e tc . ) b u t n o d e s a r ea l lo w e d t o m o v e a n y w h e r e i n t i le s i m u l a t i o n p l as l e. F u r t h e r -m ore , the re i s no c or re la t ion be twe e n d i f f e re nt node s , i . e . ,e f f e c t s l ike "node fo l lowing" or "group m ove m e nt" a re notm o d e l e d .W e u s e t w o s t o c h a s t i c p r o c e ss e s : o n e p r o c e s s d e t e r m i n e sa t w ha t t im e a m obi l e s t a t io n c ha n ge s i t s spe e d , a s~ d theo t h e r p r o c e s s d e t e r m i n e s w h e n t h e d i r e c t i o n w i ll b e c h a sl g e d.B a s i c a l ly s p e a k i n g , w e e n h a n c e t i l e r a n d o m d i r e c t i o nm o d e l w i t h s o m e n e w f e a t u r e s , w h i c h m a k e t i l e s i m u l a t e dm o v e m e n t o f n o d e s ( c a r s a n d p e d e s t r i a n s ) m o r e r e a l is t i c.I t ha s a l r e a dy be e n c r i t i c i z e d by Hong a nd Ge r la in [20]t h a t m a s s y r e s e a r c h e r s u s e a m o b i l i t y m o d e l w h e r e t h e n e wc hoic e for spe e d v a s ld d i r e c t ion qo i s not c o r re la te d to pre -v i o u s v a l u es ( s u c h a s i n t i le r a n d o m w a y p o i n t m o d e l ) . T h i sm a y c a u s e u n r e a l i s t i c m o v e m e n t b e h a v i o r w i t h s u d d e n s p e e dc h a n g e s ( v ( t ) -- ~ c x ) ) a n d s h a r p t u r n i n g s ( l a r g e ~ ( t )w h i l e v i s h i g h ) . O u r I n o d e l i J ml u d es b o t h a u t o c o r r e l a t i o nf e a t u re s . T i l e s p e ed i s c h a n g e d i n c r e m e n t a l l y b y t i l e cu r -r e n t a c c e le ra t ion of t i l e m obi le use r , a nd a l so t i l e d i r e c t ionc h a n g e i s s m o o t h : O n c e a s t a t i o n i s i n t e n d e d t o t u r n , t i l ed i r e c t ion i s ( in ge ne ra l ) c ha z lge d in s e ve ra l tbne s t e ps unt i lt i l e n e w t a r g e t d i r e c t i o n i s a c h i e v ed . T h i s c r e a t e s a s m o o t hc u r v e r a t h e r t h a n a s h a r p t u r n i n g . S e c t i o n s 3 .1 a n d 3 .2 g i v ea m a t h e m a t i c a l f o r m u l a t i o n o f t h e s e pr i n c ip l e s .
L a s t b u t n o t l e a s t , w e m o d e l t w o t y p i c a l m o v e m e n t p a t -t e n l s o f v eh i c l es w h e n t h e y a r e t u r n i n g ( S e c t i o n 3 . 3 ) .O u r m o d e l c a n b e u s e d i n b o t h d i s c r e t e - t i m e a n dc o n t i n u o u s - t i m e s i m u l a t io n s . I n b o t h c a s e s, w e d e n o t e t i l es im ul a t ion t im e by t ( in s ) , whe re t _> 0 . In a d i s c re te - t im es i m u l a t i o n , w e q u a s l t iz e t il e s i m u l a t i o n t i m e i n t o e q u i d i s t a n t
t i m e s t e p s . T i l e t i m e b e t w e e n t w o t i m e s t e p s i s d e n o t e d a sA t , a n d u s u a l l y s e t t o b e 1 s . T t l e t e r m t / A t t h e n r e p r e s e n t st i l e t i m e s t e p n u m b e r .In t i l e fo l lowing de sc r ip t ion , we use t i l e ge ne ra l t e rm" n o d e " t o d e n o t e a z ly k i n d o f n e t w o r k - e n a b l e d d e v i c e. T h i sc a n b e e . g . a p e d e s t r i a n w i t h h i s o r h e r m o b i l e t e r m i n a l o r ause r or de vic e ins ide a ve hic le . Fur t he rm ore , we use t i l e t e rm" n o d e c la s s" t o d e n o t e a p a r t i c u l a r t y p e o f n o d e ( i n a p a r -t i c u l a r s c e n a r i o ) w i t h i t s r e s u l t i n g c h a r a c t e r i s t i c m o v e m e n tp a r a m e t e r s ( e. g ., p e d e s t r i a n , c a r i n d o w n t o w n , a n d b i c y c l e ).3 . 1 S p e e d c o n t r o l
O u r c o n c e p t f o r m o d e l i n g t h e s p e e d b e h a v i o r o f n o d e si s ba se d on t i l e use of t a rge t spe e ds ( the spe e d a node in-t e nds to a c hie ve ) a nd l ine a r a c c e le ra t ion . A node goe s w i thc o n s t a n t s p e e d v u n t i l a n e w t a r g e t s p e e d i s d e c i d e d b y ar a n d o m p r o c e s s . T h e n o d e t h e n a c c e l er a t e s ( o r d e c e l e ra t e s )u n t i l t h i s d e s i r e d s p e e d i s a c h i e v e d ( o r a g a i n a n e w t a r g e ts p e e d i s c h o s e n i n t i l e m e a n t i m e ) .T h e s p e e d b e h a v i o r o f a n o d e a t t i m e t c a r l t h e r e f o r e b ed e s c r i b e d b y t h r e e p a r a m e t e r s :
i t s c u r r e n t s p e e d v( t ) izl m/s ,* i t s c u r r e n t a c c e l e r a ti o n a(t) in m/s", az ld* i t s c u r r e n t t a r g e t s p e e d v*( t ) .I n a d d i t i o n , w e d e f i n e t h r e e s t a t i c s p e e d p a r a m e t e r s t h a t
c h a r a c t e r i z e a c e r t a i n n o d e c l as s : E a c h n o d e c l a s s h a s a inaxi inul i l s p e e d Vmax, a s e t of pre fe r r e d spe e ds {vpreyo, vpre I1 , . . . } , a nd m a x i m u m v a l u e s f o r a c c e l e r a t i o n / d e c e l e r a t i o n .T i l e m a x i m u m s p e e d Vrnax r e f l e c t s t i l e m a x i m u m p o s s i b l es p e e d o f a n o d e c l a s s o r t i l e m a x i m u m a l lo w e d s p e e d i n t i l eg ive n sc e na r io , e . g . "Omax : 50 kIn/h for c a r s i n d o w n t o w n .
W e m u s t h a v e 0 < v( t ) < v ,~ a t a n y t i m e t. T i l e s e to f p r e f e r r e d v el o c i ti e s { v p ~ y o , v , ~ i 1 , . . . } m o d e l s t i l e f a c tt h a t t i l e s p e e d d i s t r i b u t i o n o f v e h i c l es a n d p e d e s t r i a n s o v e rt i m e i s n o t u n i f o r m l y d i s t r i b u t e d o n [ 0 , v m ~ ] , b u t b o t h u s e rc l as s es t e n d t o m o v e w i t h c e r t a i n " t r a v e l s p e e d s " m o s t o ft i l e t i m e . F o r e x a m p l e , a c a r i n d o w n t o w n i n t e n d s t o m o v ew i t h t i l e m a x i m u m a l l o w e d s p e e d v , n a 2 a n d a l s o f r e q u e n t l ys t o p s a t c r o s s i n g s a n d t r a f f i c l i g h t s o r d u e t o j a m s ( v =0 ) . T i l e m a x i m u m v a l u e s f o r a c c e l e r at i o n a n d d e c e l e r a t i o nre f le c t t i l e phys ic a l spe e d-up a z ld s low-down c a pa bi l i t i e s ofa node c la s s . For e xa m ple , a spor t s c a r c a n c ha nge i t s spe e dm u c h f a s t e r t h a n a t r u c k .In a s im ul a t ion , we proc e e d a s fo l lows : A t t i l e be gin-n i n g , a l l n o d e s a r e c r e a t e d w i t h a n i n i t i a l s p e e d v(t = 0),w h i d l i s c h o s e n f r o m a c e r t a i n s p e e d d i s t r i b u t i o n p (v ) . W eu s e a d i s t r i b u t i o n i n w h i c h t i l e p r e f e r r e d s p e e d v a l u e s h a v ea h i g h p r o b a b i l i t y , a n d a u n i f o r m d i s t r i b u t i o n i s a s s u m e don t i l e e n t i r e in te rva l [0, v , ,~ , 1. For e xa m ple , i f we ha ve3th re e pre fe r r e d ve loc i t i e s vp ~ io = 0, Vpreyl = gVm~z, a n dVprcf2 ~ Vraaz, we u s e a d i s t r i b u t i o n
p(v = 0 ) ~ (v ) v = 0p ( v ) = p ( v = v m a x ) 6 ( v - V m a z ) V = V m ~ ( 1 )
1--p(vPveZ) 0 < V
-
8/3/2019 Bet 01
5/9
til a speed change event occurs. Upon this event, a newtarget s peed v* is chosen from (1). We model the f requencyof speed change events according to a Poisson process: In adiscrete-time simulation with normalized time t / A t , a speeddmn ge event occurs with a certain pr obabilit y Pv* each timestep, wh ere pv* v( t* ) , or from
1 fo r arnin < a < 0- - (4)p(a ) = 0 else
if v* (t*) < v (t *). Clearly, a is set to 0 if v* (t *) = v (t*). Tlieterzn (1max is the maximum possible acceleration, and (~rninis the maxi mum possible deceleration of this nod e class. Forcars we may use amax = 2.5 m/s: and amin = -4 m/ s 2 (seeTable 1). These values could depend on vmaz of the nodeclass, in a way that no des with high v m~ ca~t speed up an dslow down in a shorter time than slow nodes.
[ [ Car downtow n13.9 m/s
0, 13.9 m/s-4. . . 2.5 m/s 2
25 sp ( v = O ) = 0 . 3p(v = v . , ~ = ) = 0 .3T a b l e 1: E x a m p l e p a r a m e t e r s f o r s p e e d c o n t r o l
In the following time steps, the speed continuously in-creases or decreases. Each step, a new speed v(t) is calcu-lated according to
v ( t ) = v ( t - A t ) + a ( t ) A t (5 )until v( t ) achieves v*( t ) . TIL e time it takes a nod eto achieve the new target direction is Atsp~d/~to~, =v*(t*)-v(t*) if no new speed change event occurs betweena(t*)t = [ t* , t*+ At~peed/~zo~]. After this procedure, we seta = 0 and the node moves again with constant speedv(t) = v* (t*) until the next speed change event occurs.Fig. 2 shows a simulation trace of a nod e's speed behavior.It was generated with the par amet ers listed in Table 1. Thefigure illustrates that the current speed value v( t ) is corre-lated to the previous speed value v ( t - At), which makesthe speed change smooth.
25 50 75 1c~ 125 1$0 1 7 5 2 o 0 2 2 5 250 2 7 5 3O 0t i m e ( i n s )
F i g u r e 2 : S p e e d b e h a v i o r v( t ) of ca r in d o w n t o w n
3 . 2 D i r e c t i o n c o n t r o lThe principle for direction control is similar to tile speed
control principle. Each node has an initial direction ~o(t = 0)which is chosen from a uniform distribution
1 ,p(~ )= ~-~" 0
-
8/3/2019 Bet 01
6/9
(~ 3.1=1
~ 5
+
i * !i ! * !
. . . . . . . . . . . . . . . . . ! . . . . . . . . . . i . . . . . i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
d l r @ l i o n I =+ "25 50
t i me ( i n s)
. . . . . . . . . . . . . . . . .. . . . . .. . . . . . i i i ,~ i; i
7 5 1 0 0 1 2 5 15 0 i 7 5 2 0 0 2 2 5 2 5 0 2 7 5 3 0 0
F igur e 3 : Di r ec t io n behav ior T ( t ) o f a ca r in down -t o w n
new direction change event occurs in the meanwhile. Afterthe curve, A T(t ) is again se t to zero.
Note that the value for Ate and the node's speed duringtile curve v(t), t* < t < t* + A te , determine the curve radius.If a node goes with constant speed v( t* ) through the curve(i.e., v( t ) = v( t* ) for t* < t < t* + Ate), the curve has a
v(t*)At~ With our principle, nodes with lowadi us of r~ = iA~(t,)l .speed go curves with a smaller radius, a nd nod es with higherspeed have a larger re.
To summarize, we can say that the direction behavior ofa node at time t is described by thre e vMues:
* its current direction T(t),* its current direction change AT(t)/At in s -1, and* its current target direction T*(t).Fig. 3 shows a simulation trace of a node's direction be-havior, generated with the param eters ill Table 2. Fig. 4
shows the top view on the simulation plane with tt,e x-y-movem ent trace of three nodes. It is an exercise for thereader to find our which curve represents the movement de-scribed by the speed behavior of Fig. 2 and the directionbehavior of Fig. 3.
Car downtow~l# w . , . 50 s
Ate 1. . 10 s 2T a b l e 2 : E x a m p l e p a r a m e t e r s f o r d i r e c t i o n c o n t r o l
3 . 3 C o rre l a t i o n b e t w een d i rec t io n c h a n g e a n ds p e e d c h a n g eThe random processes for speed change and directionchange, as described above, are runifing completely indepen -
dent from each other. This fact ntakes the implementationsimple but is in general not true in reality. In this section,we propose two additional (optional) principles that modeltypical moveme nt patter ns of cars and bicycles in downtown.Both mo vement patterns correlate the direction change withthe speed change.
10009oo8oo7oo6o o5oo
.= a0 0
30 020 010 0
0
I ' I , l t ~ 1
i ' ~ i \ i i i. . . . . . . . . . . . . . . . . i - . . . . . . . . . . . .............. ..... ,.! ,%_ .. ~._ .., - ...............
. . . . . . . - . . . . . . . . . . ~ - . . . . . . . . . . . . - . . . . . ~ . . . . > - . . . . . . . . . . . . . . ' . : : ~ . . . . - 4 . ~ . . - - . . . , . - r - ~ , : : i k " . . . . . . .. . . . . i . . . . . . . . . . . . . . .
. . . . . . . ~ ~ ' - . ~ . ... ... .... ... ... ... .... .. . _ ~ _ _i i ! i " ,. i ~ i i x........ ~ ........~ - ~v...~...............
. . . . . . . . . 4 . . . . . ~ . . . . . . .. . . . .. . . . . . . . . . .. . . . . . i . - . : : , ~-i . . . . . . .. . . . . . . . .. . .. . .. . ..: . . . ~ : , ' - . . . . . . . .
. . . . . . . . . . i . . .. . . . . . . r - : : : : :. . . . . . . . . . . . . . . . . . . .
too 2 0 0 3 0 0 4 0 0 5 0 0 6 o o 7 0 o 8 o 0 9 1 : 0 1 0 0 0x d i r e c t i o n ( i n m )
F i g u r e 4 : T h r e e m o b i l i t y t r a c e s
3 .3 .1 " S t o p - t u r n - a n d - g o " b e h a v io rUsing the concept of preferred speeds, we cart easily model
"stop-a nd-go" behavior. We set vpr , fo = 0 and assig n arath er high proba bility P%,,so to this value. A speed changee v e n t will therefore frequently result in a target spee d v* = 0(stop event).In reality, a stop of a car or bicycle is often followed by adirec tion chazlge (e.g., at cr ossings with traffic lights). ~einclude this behavior in our mobility modeh Whenever anode come s to a stop iv( t ) = 0), we choose a target directionT*- Here, we do not use a uniforml y distribu ted directionchang e as hL Sectio n 3.2, but choose A T from
{ P _ z l f o r A T = + ~2p ( A T ) = 1 - p ~ . f o r A T = 00 else
The term Pv* is the probability that the node will turn.Its value must be higher than that ill tile usual directioncontrol with v # 0 (Section 3.2). Moreover, the curve radiusrc should be smaller, since curves at crossings are usuallysharper . When the node chooses a new target speed v* ~ 0it will move around this curve.3 . 3 .2 S l o w d o w n o f t ur n i n g n o d e s
Vc'e also pr opos e to mode l th e slowdown, of vehicles beforethey are turni ng. This is reasonable for modeling cars andbicycles because of physical laws (vehicles cazl drive onlyup to a certain maximum speed around a curve with givenradius) arid because of hum an driving behavior. It is notour intension here to model a correct quantitative behavior,but we would like to enhance our model with the principletha t imdes typically slow dow~t when a cu rve is ahead.
In a simulati on, we procee d as follows (see Fig. 5): Attime t* a node decides that it will change its direction. Anew target direction T* and a curve time Ate are chosen asdescribed in Section 3.2.
From the curve radius rc we derive a maximum value forthe curve speed v, , , ~, which should be a fraction of the the-oretically max imu m possible speed, given by v, = ~r ,where g = 9.81 m/ s 2 and #, is the coefficient of static fric-tion (e.g. /z, = 0. 4. .. 0.7 for cars). If v( t* ) > v . . . . . weforce the acceleration of the node to a negative value, i.e.,a(t*) is taken fr om (4). TILe direction change is resdte duled
2 4
-
8/3/2019 Bet 01
7/9
v (~*)-v%,~=to t* * = t * + A t ~ t o ~ , , with At~to ,~ = ~(~.) . If noother direction change or speed change event occurs in theslow down period It*, t**] it is guarante ed t hat the n ode willhave a speed v ( t * * ) = v c . . . . when it enters the curve. Wese t a ( t * * ) = 0 such that the imde will drive with constantspeed v ( t ) = v c and constant direction change A~(t) aroundthe curve if no other direction change or speed change eventoccurs.
I" . .. .. .. .. .. .. .. .. .. .. .. .. . , $ p e e d ~. . . . .
~ m e t
F i g u r e 5 : M o d e l i n g t h e s l o w d o w n o f v e h i c l e s b e f o ret u r n i n g
4 . U S E R D I S T R I B U T I O N A N DB O R D E R B E H A V I O R
In simulations with a random direction model, nodes areallowed to leave the simulat ion area (see Fig. 4). W heneve ra node is subject to leave, we need a "border rule" thatdefines what to do with this node. Such a rule is also re-quired for our model. The following basic principles can befound in the literature: The nod e subject to leave can be(a) bounced back to the system area according to a certainrule, (b) "deleted" and a new node is initialized according tothe node initialization distribution, or (c) wrapped aroundto the other side of the simulation plane.
All methods guarantee that the number of nodes in thesystem area remains constant, which is often required insimulations. In the first case, a new angle (and possibly anew speed) must be chosen, e.g. as explained in Section 2(Haas and Perlm an). In the second case, we delete the leav-ing node and place a new node on a randomly chosen pointin the system area. In tile last case, a leaving node entersthe system area on the opposite side, while keeping its cur-rent speed and direction parameters. This approach modelsthe system area as a torus. In the cases (a) and (c) we mayoptionally assign a different identifier, address, etc. to th enode. This might be of interest if the algorithm subjec tto evaluation is based on tile these values (e.g., in leaderelection algorithms).These models seem to be quite easy to use. However, wemust be careful about the effect of the border behavior onthe resulting spatial node distribution. Let us give an ex-ample: At the beginning of a siinulation, we place a givennumber of nodes on the system area using a uniforin distri-bution in both dimensions (Most studies that use a randommobili ty model do so.). ~,e use bord er beh avio r (b), i.e., we"delete" each node that leaves the system area and gener-ate a new node. Where should we place the new imde onthe system area? Wha t is the resulting user distributi on in
the steady stat e of the simulation? Using again a uniformdistribution for random placement of leaving nodes, resultsin a higher node density in the middle of the area and alower density at the area edges. Fig. 6 shows a histogra mobt ain ed th rou gh si nmlat ion on a 1000 1000 m 2 area us-ing a basic rand om dir ection model. ~,e divided the entir earea into 20 20 subareas and counted the number of nodesin this subarea every time step. The sum of all subareasis 100%. In the middl e of the area mo re than 0.4% of theimdes reside, whereas there are less than 0.1 at the borders.
134g~renG ~ - -0 ,004 ........0 .0 03 - -0 .0 (~ . . . . . . . .0 .001 . . . . . . .
0 .0~60 .0040 .0030 .00~0.0010 . 0 0 0
F i g u r e 6: H i s t o g r a m : S p a t i a l n o d e d i s tr i b u t i o nA similar effect occurs is we use the random direction
model (Section 2) on a limited two-d imensio nal area. Thisis done in inazty evaluations of ad hoc netw orking protocols(see e.g. [38, 7, 18]). The desc rib ed effect also occurs herebecause the random waypoint model does not use an angle
for direction control but chooses a destination point inthe system area. Nodes in the middle of the area have auniformly distributed angle, but nodes at the border aremore likely to move back to the midd le. The resulting spatialnode distribution is not uniformly distributed but looks likein Fig. 6.
When evaluatbig algorithins or protocols is such a sce-nario, this effect may lead to invalid results and wrong con-clusions. For example, if we analyze dynamic channel allo-cation algorithms in a cellular environment, we will (in themean) always need more channels in the iniddle of the simu-lation plane, since here the user den sity is the highest. Fur-thermore, the inhomogeneous user distribution makes thegeneration of "hot spots" at the begiiming of the simula-tion useless. Vv'e can overcome these pro blems by using atorus-like system area (wrap-aro und border behavior).
5 . C O N C L U S I O N SBased on a classification of mobility mod els used ill wire-
less network research, we presented an enhanced randommobility model, which belongs to t he class of rando m direc-tion models.
~,'e use two sto chast ic princ iples for direc tion an d spe edcontrol in which the new values for speed and direction arecorrelated to previous values. This featur e makes the move-ment of nodes Inore smooth than simple approaches to ran-dom mov ement, and this is the reason w hy we denote our
2 5
-
8/3/2019 Bet 01
8/9
m o d e l a s S m o o t h R an d o m M o b i li t y m o de l . W h i l e t h e m o v e -ment behavior of nodes becomes more r ea l is t i c , t he i rnple-menta t ion and computa t ion ef for t i s s t i l l l ow.Our co ncept for speed cont ro l i s based on so-cal l ed t argetspeeds . A speed change even t occur s according to a Poi ssonprocess . Upon th i s event , a new t arget spee d i s chosen f roma genera l speed d i s t r i but ion . By def in ing a se t of pr ef er r edspeeds , we ar e able t o model t ypica l speed pat t erns such aslong s top or l ong t r avel per iods as wel l as " s top and go be-havior . " The t ime betweel l two di r ec t ion changes i s mode ledin a similar way.Fur thermo re , we proposed two extensions tha t m odel t ypi -ca l mobi l i t y pat t erns of vehic l es i n which speed and d i r ec t ionchange ar e ar e not i ndepen dent f rom each o ther . Wherea sin the f i r s t ex t ens ion a speed change event ( a s top event )t r i gger s a d i r ec t ion change event , i n t he second extension, adi r ec t ion change event t r i gger s a speed change ( s lowdown)event .~ 'e see a par t i cul ar appl i ca t ion ar ea of our mod el i n s imu-l a t ions of ad hoc networks and micro-cel lu l ar envi ronm ent s ,i n which the m ovem ent of i ndiv idual mobi l e s t a t i ons i s of i n-t er es t and i s not bounded by the scenar io . I n wir e l ess ad hocresearch , t he enhanced model can be appl i ed to i nves t iga t ethe per formance of rout ing protocol s , power mana geme nt ,c lus t er ing a lgor i thms, and a l ike .Our pr incip l es can eas i ly be employed in exi s t i ng s im-ula t ion tool s , and they can a l so be appl i ed to o ther ad-vanced mobi l i t y model s , e .g ., t o t he group m obi l i t y modelpresented in [20] . I n f ac t , our model r epresent s a compro-mise between s imple model s , such a bas i c r andom waypointmodel , and very r ea l i s t i c mobi l i t y model s , such as model sf rom t r anspor t a t ion r esearch or move ment t races . The l a t -t e r a r e u su a ll y v e r y co m p l i ca ted t o i m p l em en t a n d / o r n eeda huge dat abase ( in par t icul ar for l ong s imula t ions) .Last but n ot l eas t , we d i scussed the impact of t he borderbehavior on the spaci a l node d i s t r i but ion and point ed outa p i t f a l l : Applying a r andom di r ec t ion model or a r andomwaypoint n todel on a l imi t ed s imula t ion p l ane can cr ea t ea non-u ni form no de d i s tr i but ion . Thi s might l ead to un-wanted ef f ect s i n s tudies of ne tworking a lgor i thm s ( e .g . i nevaluat ion of r adio r esource a l locat ion a lgor i thms) .
6 . R E F E R E N C E S[1] L F. Akyi ldiz, S. M. Ho, and Y.-B. Lin.M o v em en t - b a sed l o ca t i o n u p d a t e an d s e l ec ti v e p ag i n gfor PCS networks . IEEE/ACM Trans. on Networking,4(4) :629-639, Aug. 1996.[2] I . F. Akyi ldiz, Y.-B. Lin, W.-R. Lai , and R.-J. Chen.A new random walk model for PCS networks . IEEEJourwal on Selected Areas in Commurdeations,18(7):1254-1260, 2000.[3] A. Bar-Noy, I . Kessler , and M. Sidi . Mobi le users: Tou p d a t e o r n o t t o u p d a t e ? ACM/Baltzer WirelessNetworks, 1(2):175-185, 1995.[4] H. Boche and E . Jugl . E xtension of ETSI ' s mobi l i t ymodel s for UMTS in order t o get more r ea l i s t i cresul ts. In Prec. UMTS Wor'k~hop, Gi inzburg ,Germany, Nov. 1998.[5] J . B roch, D. A. Mal t z , D. B . Johnson, Y. -C . Hu, andJ . J e t d m v a . A p e r f o r m an ce co m p ar iso n o f m u l t i - h o pwi re l ess ad hoc network rout ing protocol s . I n Pr'oc.
MobiCom, AC M IntervL. Conf. on Mobile Computingand Networking, Dallas, TX, Oct . 1998.[6] G. Colombo. Mobil i ty models for mobi le systemdesign and d imensioning. In Prve. IT C Specialist~
Seminar: Teletraffic Modelling and Measurement mBrvadband and Mobile Communications, pages133-146, Leidschendam, Nether l ands , Nov. 1995.[7] S. R. Das, C. E. Perkins, and E. M. Royer .P e r f o r m an ce co m p ar i so n o f t w o o n - d em an d r o u t i n g
protocol s for ad hoc networks . I n Proc . IEE E Infocom,Tel Aviv, Israel , 2000.[8] S. R. Das, C. E. Perkins, E. M. t~oyer , and M. K.Mar ina . P er formanc e com par i son o f two on-demas~drout ing protocol s for ad hoc networks . IEEE PersonalCommunications, pages 16-28, Feb. 2001.[9] J. Ebersp cher , H.-J . VSgel , aatd C. Be t tste t ter . GSM- Switching, Services and Prvtocols. Jolm Wi ley &Sons, 2nd edi t ion, Mar . 2001.
[10] ETSI . Univer sa l Mobi l e Telecommunicat ions Syst em(UMT S) ; se l ec t ion procedures for t he choice of r adiot r ansmiss ion t echnologies of t he UM TS (UM TS 30.03,ver s ion 3 .2 .0) . Technical r epor t , EuropeanTelecommunicat ion Standards Ins t i t u t e , Apr . 1998 .[11] Y. l~ang, I . Chlamtac, and Y.-B. Lin. Channeloccupancy t imes and handof f r a t e for mobi l eco m p u t i n g an d P C S n e t w o r k s . IEEE Trans. onComputers, 47(6) , June 1998.[12] Y. Fang, I . Chlamtac , and Y. -B . Lin . Por t ablem o v em e n t m o d e l i n g f or P C S N e t w o rk s . IEEE Trans.on Vehicular" Technology, 49(4) , July 2000.[13] D. Gazi s , R . Herman, and R.Rothery . Nonl inearfo l low- the - l eader model s of tr af f ic f l ow. OperationsRe~ear'ch, 9:545, 1961.[14] R. A. Gudr in . Channel occupancy t ime di s t r i but ion ina ce l lu l ar r adio sys t em. IEEE Ttans. on Vehicular"
Technology, 36(3) :89-99, Aug. 1987.[15] Z . J . Haas and M. R. Pearhnan. The per formance ofquery cont ro l schemes for t he Zone Rout ing Protocol .In Prec. ACM SIGCOMM, V'ancouver, Cana da, Sept .1998.[16] C. H ar tm ozm a11d H .-J. V Sgel . Telet raff ic analysis ofS D M A - sy s t em s w i t h i n h o m o g en eo u s M S l o ca t i o ndi s t r ibut ion and mobi l i t y . Kluwer Wireless PersonalCommunications, 11(1) :45-62, Oct . 1999.[17] J. hee P~yu, Y .-W. K im, and D.-H . Cho. A newrout ing scheme based on the t erminal mobi l i t y i nmobi l e ad hoc networks . I n Prec. IEEE VehicularTechnology Conf. (Fall), pages 1253-1257,Amsterdam, Hol l and, Sept . 1999.[18 ] G. Hol l and an d N. H. V aidya. Analys i s of TC Pper forman ce over mobi l e ad hoc networks . I n Proc.MobiCom, A GM Interw. Conf. on Mobile Computingand Networking, pages 207 -218 , Seat t l e , WA, USA,Aug. 1999.[19] D. Hong and S . S . Rappapor t . Traf f i c model and
per formance analys i s for ce l lu l ar mobi l e r adiot e l ephone sys t ems wi th pr ior i t i zed and nonpr ior i t i zedhandof f procedures . IE EE T~'ans. on Vehicular"Technology, 35(3) :77-92, Aug. 1986.[20] X. Hong, M. Ger l a , G. Pei , and C . -C . Chiang. Agroup mobi l i t y model for ad hoc wi r e l ess networks . I nPrvc. ACM WSWiM, Interv~. Wor'kshop on Modeling,
2 6
-
8/3/2019 Bet 01
9/9
Analysis, arid Simulation of Wireless and MobileSystems, Seattle, 1999.[21] P. Johansson, T. Larsson, N. Hedman, B. Mielczarek,and M. Degermark. Scenario-based performanceanalysis of routing protocols for mobile ad-hocnetworks. In Proe. MobiCom, ACM Intervl. Co're onMobile Computing arid Networking, Seattle , VVA, Aug.1999.[22] F. Jondral and A. Wiesler. GT"undlagen der
Wahrseheinlichkeitsrechnung urid stochastischerPlvzesse fi~r" Ingenieure. Teubner, 2000.[23] E. Jugl. MobilitiitsmodeUier~ung und Einfliisse aufSystemparameter yon Mobilfunksystemen. PhD thesis,Ilme nau University of Technology, Germany, Shaker,2001.[24] T. Kim, M. Chung, and D. K. Sung. Mobility andtraffic analyses in three-dimensi onal PCSenvironments. IEEE ~'ans. on Vehicular Technology,47(2):537-545, May 1998.[25] T. S. Kim, M. Chung, D. K. Sung, and M. Sengoku.Mobility and traffic analyses in three-dimensionalindoor environments. IEE E 7ans. on VehicularTechnology, 47(2):546-557, May 1998.[26] T. S. Kim, J. K. Kwon, and D. K. Sung. Mobility andtraffic analysis in three-di mension al high-rise b uildingenvironments. IEEE Trans. on Vehicular Technology,49(5):1633-1640, May 2000.[27] D. Lain, D. C. Cox, and J. Widom. Teletrafficmodeling for p ersonal communica tion services. IEEECommunications Magazine, 35(2):79-87, Oct. 1997.[28] Z. Lei and C. Rose. Probability criterion basedlocation tracking approach for mobility managementof personal communi cation systems. In PTvc. IEEEGlobecom, pages 977-981, Phoenix, AR, Nov. 1997.[29] Z. Lei and C. Rose. Wireless subscriber mobilitymanagement using adaptive individual location areasfor PCS systems. In Pwc. IEEE ICC, Atlanta, June1998.[30] Y.-B. Lin. Performance model ing for mobile telephonenetworks. IEEE Network, pages 63-67, Nov. 1997.[31] Y.-B. Lin. Reducing location update cost i n a PCSnetwork. IEEE/ACM Trans. on Networking,5(1):25-33, Feb. 1997.[32] J. G. Markoulidakis, G. L. Lyberopoulos, D. F.Tsirkas, and E. D. Sykas. Mobility model ing inthird-genera tion mobile telecommunication systems.IEEE Personal Communications, pages 41-56, Aug.1997.[33] G. Morales-Andreas and M. Villen-Altamirano. Anapproach to modeling subscriber mobility in cellularnetworks. In Pwc. 5th World TelecommunicationFor~um, pages 195-189, Geneva, Switzerland, Nov.1987.[34] S. Nanda. Teletraffic models for urban and s ubur ban dmicrocells: Cell sizes and handoff rates. IEEE Trans.
on Vehicular Technology, 42:673-682, Nov. 1993.[35] P. V. Orlik and S. S. Rappaport. A model forteletraffic performance and channel holding timecharacteriza tion in wireless cellular communicatio n. InPwe. IEEE ICUPC, pages 671-675, San Diego, Oct.1997.
[36] M. R. Pearl man, Z. J. Haas, P. Sholander, and S. S.Tabrizi. On tile impact of alternate path routing forload balancing in mobile ad hoc networks. In Proe.MobiHOC, InteTw. Workshop on Mobile Ad HocNetworking and Computing, pages 3-10, Boston, MA,Aug. 2000.[37] C. E. Perkins aJld E. M. Royer. Ad-hoc on-demanddistance vector routing. In Pwc. IEEE Workshop onMobile Computing Systems and Applications, pages90-100, New Orleans, LA, Feb. 1999.[38] E. M. Royer and C. E. Perkins. Multicast operation ofthe ad-hoc on--demand distance vector routingprotocol. In Plvc. MobiCom, AC M Intelw. Core onMobile Computing and Networking, pages 207-218,Seattle, WA, USA, Aug. 1999.[39] T. Sakamoto, E. Kamagata, and M. Serizawa.Location registration and paging for in-buildin gpersonal multi -media communication systems. InPrve. IEEE Vehicular Technology Core, pages1878-1882, Atlanta, Apr. 1996.[40] M. Schopp. User modeling and performance evaluationof distributed location management for personalcommuitications services. In Pwc. InteTvi. Teletraff~cCongress, pages 23-34, Washington, DC, June 1997.[41] J. Scourias and T. Kunz. An activi ty-ba sed mobilitymodel and location management simulationframework. In Pwc. MSWiM, A CM Interw. Workshoporb Modeling, Analysis , arid Simulation of Wirelessand Mobile Systems, Seattle, WA, Aug. 1999.[42] S. Tekinay. Mobility modeling and manag ement incellular networks. In Proe. IEEE Infocom, pages177-199, Bombay, India, Dec. 1994.[43] R. Thomas, H. Gilbe rt, and G. Mazziotto. Influence ofthe moving of the mobile stations on the performanceof a radio mobi le cellular network. In Proc. NordicSeminar on Digital Land Mobile RadioCommunications, pages 1-9, Sept. 1988.[44] M. M. Zonoozi ~nd P. Dassanayake. User mobilitymodeling and characterization of mobility patterns.IEEE Jourwal on Sel. Areas in Communications,
15(7):1239-1252, Sept. 1997.[45] M. M. Zonozzi and P. Dassanayake. Mobility modelingand chmnnel holding ti me d istribu tion in cellularmobile communica tion systems. In P, ve. IEEEGlobeeom, pages 12-16, Singapore, Nov. 1995.
2 7


















