AVR Study Report

of 48
-
Upload
santoshkumar -
Category
Documents
-
view
222 -
download
0
Transcript of AVR Study Report
-
7/29/2019 AVR Study Report
1/48
VOCATIONAL TRAINING REPORT
DAHANU THERMAL POWER STATION
BRIEF STUDY OF BRUSHLESS EXCITATION
SYSTEM AT DAHANU THERMAL POWER STATION
Pankaj Gupta
Harikumar ChariVikrant Chaudhari
Electrical Engineering Dept
-
7/29/2019 AVR Study Report
2/48
INDEX
1. INTRODUCTION
2. Salient Features
3. Main Plant Overview
4. Thermal Power Plant Cycle And Its Operation
5. Special Features
6. Power Generation Process
7. Main Plant
8. Generator
9. Transformers
10. Motor
11. Electrical System at Dahanu TPS
12. Safety Precautions
2
-
7/29/2019 AVR Study Report
3/48
CHAPTER 1
IntroductionLocation: Dahanu Thermal Power Station is about 120 km north of Mumbai on
Mumbai-Delhi Western Railway route and is situated at 3 km away from Dahanu
Railway station. It is suitably linked by Railway as well as road. The Western
Express highway is 26 km east of Power station.
Basic Requirement of the Project:
The estimated requirements of coal, water and land for two units of 250 MWcapacities are as follows:
Coal per year 2.5 million tonnes based on an average calorific value of 3300
kcal/kg.
Cooling water of 84,000 cu 3 /hr for once through cooling
Fresh water for boiler 300 cu 3 /hr make-up
Land for power plant 351 hectares
Land for Ash disposal 370 hectares area for 25 years.
Land:
Total land - 821.58 hectares
Land for Plant - 351.58 hectares
Land for Ash disposal area - 370.00 hectares
Land for colony - 100.00 hectares
Water:
Sea Water - 84,000 cu 3 /hr
Fresh Sweet Water - 300 cu
3
/hr
Coal:
1.85 Million Tonnes / Year based on blended average calorific value of 4200
kcal/kg. i.e. 1.60 million tonnes Indian coal and 0.40 million tonnes imported
coal.
2.5 million tonnes / year based on average calorific value of 3300 kcal/kg.
Dahanu Plant has started receiving washed coal from SBCWL Coal Washery
project at Korba, MP. This Washery project is a joint venture between BSES
Ltd & Spectrum Technologies, USA.
Coal is imported from Indonesia by Sea.
3
-
7/29/2019 AVR Study Report
4/48
Major Milestones at Dahanu TPS:
Start of Land Development - 01/04/1990
Finalization of Main Plant Contract - 29/01/1991
Boiler Unit # I start of foundation work - 11/04/1991 Station Commercial Operation - January 1996
Activity Unit # I Unit # II
First Synchronization 06/01/1995 29/03/1995
Commercial Operation July 1995 January 1996
Special Features:
Complete automatic control & monitoring of the turbine, boiler andauxiliaries by Digital Distributed Control, Monitoring and Information
System (DDC-MIS).
Utilization of concrete volute pumps for CW System.
Erection of the tallest chimney (275.3 mtr.) in the country.
State-of-the-art Electronic Precipitators (ESP) with efficiency of 99.9% and
technologies for complete environment safeguard.
Completely Hydrogen cooled Generators.
Supervisory Control and Data Acquisition (SCADA) system for transmission
and distribution. Microprocessor based fire detection system.
Advanced air pollution monitoring system.
4
-
7/29/2019 AVR Study Report
5/48
CHAPTER 2
Excitation Systems
The basic function of the excitation system is to provide direct current to the
synchronous machine field winding.
Excitation systems perform control and protective functions essential to the
satisfactory performance of the power system.
2.1 Control functions: -
1) Control of voltage and reactive power flow.
2) Enhancement of system stability.
The protective functions ensure that the capability limits of the synchronous
machine, excitation systems and other equipment are not exceeded.
Generator consideration: -
1. Maintain terminal voltage as output varies
To supply and adjust field current to maintain terminal voltage as
the output varies within the continuous capability of the generator
(V curves).
2. Must be able to respond to transient disturbance with field forcing.
To respond to transient disturbances with field forcing consistent
with generator instantaneous and short term capabilities.
Power systems consideration: -
Effective control of voltage and enhancement of systems stability-
1. Rapid response to improve transient stability.
2. Modulation of field to enhancing small signal stability. (PSS).
To fulfill these roles satisfactorily, the excitation system must satisfy the
following requirements:
a) Meet specified response criteria;
b) Provide limiting and protection to prevent damage to itself, generator and
other equipment;
c) Meet specified requirements for operating flexibility, reliability and
availability.
Excitation systems are extremely important as a first line of defense in
maintaining system stability and their role has continually been growing.
5
-
7/29/2019 AVR Study Report
6/48
These systems have continued to evolve improved speed of response and
capabilities, particularly in 1960s; also began to include power system stabilizers.
Modern exciters are capable of practically instantaneous response and very high
ceiling voltages, with a wide array of control and protective circuits.
2.3 Characteristics of modern excitation systems
1) Fast response.
2) High ceiling voltage
Exciter ceiling voltage is the maximum voltage that may be attained by an
exciter with the specified condition of load. For rotating exciters ceiling should be
determined at rated speed and specified field temperature.
2.4 Dynamic performance measures:
Following are the few important parameters on which dynamic performanceof an excitation system is judged.
1. Nominal exciter ceiling voltage
Nominal exciter ceiling voltage is the ceiling voltage of an exciter loaded
with the resistor having an ohmic value equal to the resistance of the field winding
to be excited.
This resistance shall be determined at a temperature of
a) 75 C for field winding designed to operate at rating with a temperature rise
of 60C or less.
b) 100C or field winding designed to operate at rating with a temperature rise
greater than 60C.
For rotating exciters the temperature of the exciter field winding should be
considered to be 75C.
2. Excitation system ceiling voltage
Maximum direct voltage that excitation system is able to supply from its
terminal under specified conditions.
3. Excitation systems ceiling current
It is the maximum current that the excitation system is able to supply from its
terminal for a specified time.
6
-
7/29/2019 AVR Study Report
7/48
4. Excitation system voltage time response
Excitation systems output voltage expressed as the function of time under
specified condition.
5. Excitation systems voltage response timeThe time in seconds for the excitation systems to attain 95%of the difference
between the ceiling voltage and the rated load field voltage under specified
conditions.
6. High terminal response excitation systems
It is an excitation system, having voltage response time of 0.1s or less. It
represents a high response and fast acting excitation systems.
2.5 Elements of Power System
7
-
7/29/2019 AVR Study Report
8/48
2.6 Types of excitation systems:
Classification based on the power source.
1. DC excitation systems.
2. AC excitation systems.3. Static excitation systems
1. DC excitation systems
Use dc generators as source of power, driven off main generator shaft or separate
motor, self or separately excited. Typical of early systems and have been slowly
disappearing since 1960s; still exist and need to be modeled in stability studies,
often with modern voltage regulators fitted.
DC excitation system
2. AC excitation systems
Use ac machines (alternators) as source of power, with exciter usually on same shaft
as turbine-generator. Either controlled or non-controlled rectifiers rectify AC output
of the exciter, which may be stationary or rotating (brush less excitation systems).
Early systems used combination of magnetic and rotating amplifiers as regulators;
new systems use electronic amplifier regulators.
8
-
7/29/2019 AVR Study Report
9/48
AC excitation system
3. Static excitation system
All components are static (i.e. stationary) and dc is supplied to the generator field
via slip rings.
Power supply to rectifiers is from main generator or the station auxiliary bus.
Three main types: -
Potential-source controlled-rectifier systems
Compound-source rectifier systems
Compound-controlled rectifier excitation systems
9
-
7/29/2019 AVR Study Report
10/48
2.7Comparison between Brush less & Static Excitation systems:
Brush less excitation system Static excitation system
1) Exciter response limited to excitermachine time constant.
1) Fast response
2) Field discharge with natural time
constant or inverter operation
2) Field discharge by field discharge
resistor
3) Supply from PMG hence no initial
built up circuit required.
3) Initial built up circuit is required.
4) Easy supporting of short circuit
currents
4) Supporting of short circuit current
requires special
compounding transformer.
5) No slip ring and brush gears henceexcitation quantities are
approximated.
5) Direct measurement of fieldquantities is possible.
6) Since no slip ring and brush gears
are involved, wear & tear is less
hence the maintenance cost is low.
6) Wear & tear of slip rings and brush
gears requires more frequent
maintenance.
7) Power requirement are smaller
hence uses small Thyristor,
rectifiers
7) Power requirements are higher. No
limitation on the degree of
redundancy of thyristor bridge.
8) Less space required for necessary
cubicles
8) More space required for cubicles.
10
-
7/29/2019 AVR Study Report
11/48
CHAPTER - 3
Study of Excitation System at DTPS
3.1 Basic mode of operation
THYRISIME-04- voltage regulator is designed for excitation and control of
brush less generators the machine sets consists of the generator and a direct coupled
exciter unit with a 3phase main exciter rotating rectifiers and a permanent magnet
auxiliary exciter the main component of voltage regulator are two close loop control
systems each followed by a separate gate control unit and Thyristor sets and de-
excitation equipment.
The control system (1) for an automatic generator voltage control comprisesthe following one
1. Generator voltage control.
2. Excitation current regulator controlling the field current of main exciter.
3. Circuit for automatic excitation build up during start up and field suppressing
during shut down.
4. Limiter for the under excited range.
5. Delayed limiter for over excitation range.
Field forcing limits (practically un-delayed)
The output current of the thyristor sets to the maximum permissible value when
the voltage regulation calls for maximum excitation. Normally, the maximum
permissible value is 1.5times the rated excitation. The over excitation limiter
ensures delayed reduction of the excitation current to the rated value in the over
excited range that is between rated excitation and maximum excitation. The delay
time depends on the amount by which the rated value has been exceeded. These
limiters protect Thyristor sets and machine against over excitation with two high
values or to long duration.
In the under excited range the under excitation limiter ensures that the minimum
excitation for stable parallel operation of the generator with the system is availableand that the under excited reactive power is limited accordingly. The response
characteristics is formed on the basis of the generator reactive current active current
and terminal voltage and can be matched to the generator and system data.
The power system stabiliser (PSS) serves to dampen rotor oscillations of
synchronous generator by additional influence on the excitation systems and
acceleration as well as slip signal is required for stabilisation, are derived fro the
active power and terminal frequency as supplied by the generator after suitable
amplification the stabilising signal generated which acts on the voltage regulator of
the synchronous machine.
11
-
7/29/2019 AVR Study Report
12/48
Control system (2) manual it mainly comprises a second excitation current
regulator with separate sensing for the actual value. This control system is also
called manual control system, because for constant generator voltage manual
readjusting of the excitation current set point is requires when changing thegenerator load.
The excitation current regulator permits plotting of generator characteristics
and setting of protective relays during no load and short circuit runs of the generator
during communing and maintenance work. The system can also be used for the
setting of generator excitation during normal operation when the AVR is defective.
Normally the AVR is in-service even during start up and shutdown of the
generator set. Set-point adjuster of the excitation current regulator for manual is
track automatically so that the event of fault change over to manual control is
possible without delay. Automatic changeover is initiated by some special faultcondition. Correct operation of the follow up control circuit is monitored and can be
observed on the matching instrument.
Either control system is co coordinated with a separate gate control and
Thyristor set. Separate equipment is also provided supplying power to either control
system. The two separate Thyristor set for automatic voltage regulation and
excitation current control have the same ample dimensioning regarding current and
blocking voltage. Each Thyristor is fused separately. The Thyristor set for
automatic regulation can be switched off by means of an isolated contacts in the
gate control, power supply and output side. This isolator in conjunction with
corresponding arrangement and design of Thyristor set enables an exchange of
Thyristor and fuse during operation if necessary whilst operation is continued by
means of the excitation current regulator (manual). In addition the thirstier set for
automatic voltage regulation is equipped with current flow monitoring system for
detecting failure of firing pulses or fuses. Automatic changeover to the manual
current regulator is initiated by this system.
On the input side the Thyristor set are fed with auxiliary power from 220V,
400Hz permanent magnet auxiliary exciter. The output side of the Thyristor set
feeds the field windings of the main exciter with variable DC current.
To de excite the generator during shut down or when the generator protectionsystem has picked up. A command is transmitted to the output of both control
system, driving the Thyristor set being in service to minimum negative output
voltage (inverter operation) de-excites the main exciter in less than 0.5 s. the
generator de-excitation following is a function of the relevant effective generator
time constant.
The off command is issued to the field breaker via its tripping coil. In the
event of failure of electronic field suppression by inverter operation de-excitation
would be achieved with a delayed via the field discharge resister.
12
-
7/29/2019 AVR Study Report
13/48
3.2 Excitation control, start up and shut down, field breaker control and
De-excitation.
Excitation and voltage closed loop control are not necessary for speeds under
approximately 0.95 times rated speed. Further more closed loop control of thegenerator voltage to the rated voltage would not be permissible at low speeds, since
the generator and unit transformers would become saturated. For this reason,
functions are provided for enabling excitation during start up and for blocking
excitation during shut down of the generator.
The speed is detected via the largely speed proportional voltage of the
auxiliary exciter. The field breaker is to be switched on after reaching the speed
limit required by a manual command or from a functional group control system.
Closing of the field breaker is inter locked with the criterion ramp function
generator lower limit to insure that the generator voltage builds up slowly with out
over shooting. During excitation current control (MANUAL), the lower limit of the
set point adjuster is interred locked instead to ensure that zero excitation is obtained
after closing. With the field breaker being closed and the speed limits exceeded the
pulse blocking signal to the generator runs up, thus building up the generator
excitation if automatic voltage control (AUTO) has been selected. The run up
command is stored by a memory with remnant relay.
When the speed drops below that limit values during shut down this initiates
together with the status Generator not loaded
Field breaker off command
Pulse blocking signal to the gate control set.
Run down of function generator.
Run down of function generator may also be initiated during rated speed by the
off state of the field breaker, when the breaker is tripped from the generator
protection system. The speed criteria are monitored with respect to their
importance. Presence of the criterion n< or absence of the criterion n> while the
generator is loaded will be alarmed.
Under excitation current control (manual) no automatic excitation is build-up is
affected during start up. When the field breaker is closed the excitation is at itslowest possible value = zero value approx. the desired excitation can be set on the
set point adjuster (lower/ rise push button in the control room). During shut down of
generator the field, current set point adjuster receives continuous lower command
on tripping of the field breaker so that the set point adjuster is set to the lower limit
position.
The tripping circuit for the de-excitation are provided twice for redundancy
reason. This should be complemented by corresponding safety in the power supply
for the trip circuits.
13
-
7/29/2019 AVR Study Report
14/48
The field breaker is automatically tripped during generator shut down. In
emergencies, the field breaker can also be tripped manually via the generator
protection system. In this case, turbine-tripping command is transmitted through
turbine control equipments.
During short circuit operation of the generator for setting of the generatorprotective equipment, the degree of excitation is adjusted by means of the excitation
current regulator (manual). During this mode of operation, a manual faulted criteria
available in the alarm system of the regulator can be provisionally be used for
tripping the field breaker.
14
-
7/29/2019 AVR Study Report
15/48
3.3 Automatic voltage regulator (AUTO)
The design of the amplifier circuit for the close loop control of the generator
voltage is shown in the fig. The potentiometer R1 fed from the +10V stabilised
voltage presets the base reference value, the standard corresponding 85% ratedvoltage.
Added to this is the variable value from the set point adjuster, as standard 0-
20%, corresponding to a total setting range of 85 to 105%. The output voltage of the
set point adjuster is applied through amplifier N1 to the potentiometer R2 that
enables the setting range width to be changed. The position of the set point adjuster
is available at the output of the amplifier N1 for position indication and as a
variable for the under and over excitation limiters.
The generator voltage actual values present on the potentiometer R3; it is set
such that the out put voltage of the subsequently arranged amplifier N2 amounts to8V at rated generator voltage.
The comparison of the set point with the actual value takes places at the input
of the potential amplifier N4.furtahe more the out put of the amplifier N3 which
sums up the influencing factors of the compensation (reactive current effect) and of
the under and over excitation limiters, is also switched to this junction point. The
result of these influences is that of an additional set point. The inputs for the limiters
as well as further free inputs of the amplifiers N3 can be individually switched to
this point. The compensation can be set to between 0 and approx. 10% by a
potentiometer.
A cascade of a proportional integral voltage regulator (N4, N7) and a
following excitation current regulator (N14, N15) serves for dynamic evaluation of
the deviation of between set point and actual value. The deviation is determined and
amplified by amplifier N4; the gain is set at potentiometer R4. The integral function
is provided by amplifier N7 and adjusted at potentiometer R7. The feedback resistor
R8 determines the static gain.
The amplifier N9, N10 with high proportional gain limit the +/- out put
voltage
Have the amplifier N8 and thus the input signal to the excitation current regulator,
depending on the setting of the potentiometers R9, R10.Negative out put voltage of the PI voltage regulator results in a positive set
point value to the input of the excitation current proportion (P-) regulator N15. This
P-regulator compares the positive set point value against a negative actual value
signal from amplifier N14 and amplifies the difference. The gain of the P- amplifier
is adjusted by potentiometer R15. Under steady state condition, the set point and
actual value the signal have approx the same amount, the difference setting to a
value which multiplied by the gain of N15v results in the required signal going to
the gate control set.
15
-
7/29/2019 AVR Study Report
16/48
Negative voltage to the gate control set generates firing angle infinity < 900
thus supplying power to the field winding of the main exciter. Positive voltage
generates firing angles infinity > 900 thus drawing power from the field winding of
the exciter resulting in current falling towards zero.
The relay K15 switches a positive voltage to a limiting input of amplifier N15during the de-excitation resulting in equal positive voltage to gate control circuit.
The Thyristor set current drops < 0.5 sec to zero the generator voltage or generator
current in the case of a short circuit follows with a delay corresponding to the
relevant generator time constant. As soon as the current reaches zero Thyristor turns
off and field winding looses excitation.
The excitation current actual value = output current of the Thyristor is sensed
by two transducer one combination is provided for automatic voltage regulator and
other for manual control system.
16
-
7/29/2019 AVR Study Report
17/48
3.4 Field forcing
With the automatic voltage regulation calling for maximum excitation of the
generator the thyristor set initially supplies a higher voltage to field winding of the
main exciter than that actually required under steady state conditions. Until the
actual current in the main exciter, field winding has reached the excitation currentset point coming from the PI voltage regulator. Over driving, the voltage to the field
winding of the main exciter reduces the time required for building up the
corresponding current in same field winding and thus improves the exciter response.
The over driving function also referred to as field forcing also becomes effective in
the case of smaller control operations. The proportional excitation current regulator
N15 together with proper setting of the control limits achieves this effect. The
maximum possible out put voltage of the thyristor set UA max is determined by a
limit set as required in the gate control unit that is the minimum delay angle for
rectifier operation. Because of the high gain of the current regulator, N15 smallincrease of the set point is sufficient to reach UA max.
The maximum output current IA max is determined by the maximum
possible excitation current set point from the PI voltage regulator. This set point is
limited by amplifier N10 with respect to a reference voltage coming from ramp
function generator N11 the function of which is explained below. This reference
voltage is corresponding with the setting on potentiometer R11.
Over driving also becomes effective in case of down ward control action. The
mean possible reversed output voltage gain is determined by limit set in the gate
control unit i.e. the maximum delay angle for inverter operation. The positive signal
from the PI voltage regulator to the excitation current regulator is limited by
amplifier N9 according to setting of the potentiometer R9 to a small value.
At the beginning of a generator start up cycle the output voltage of the ramp
function generator N11 is zero so that the thyristor set output current is limited to
zero. When a speed value just short of synchronization is reached the ramp function
generator gets its input voltage to run up to its maximum value with approximately
20 sec. thus due to the gradual enabling of the current the generator receives its
voltage with in a few seconds with out over shooting. On shut down of the machine
the ramp function generator runs back to the output zero after revolving the run up
command. Failure of diodes in the rotating rectifier between the main exciter andthe generator field winding reduces its load capacity. The control panel in the
regulator cubical includes a switch by means of which the normal field forcing
values ZA max of 1.5 times rated excitation can be limited to 1.1 times the rated
excitation. This is effected via a voltage divider R10 in the ramp function generator
output by means of which the field forcing limitation is reduced. Field forcing
limitation I.e. limitation of thyristor set output current to ZA max is monitored by a
limit monitor which senses output current of the thyristor set and its pickup value
being adjusted o 1.1 IA max. response of this limit monitor initiates automatic
change over to the manual control system.
17
-
7/29/2019 AVR Study Report
18/48
3.5 Under excitation limiter
Operation of the generator requires its capability curve to be observing from
which the permissible active and reactive power combinations can be seen as wellas the ranges in which the generator must not be operated or for limited period only.
In the basic capability diagram below or permissible points inside the area A-B-C-
D-E-F.
The section A-B-C is obtained on the assumption of a rotor displacement
angle, which, because of the increase of this angle on short circuit conditions in the
systems, is to provide a safety margin from the actual stability limit. D-E is a
selection of the circuit rated apparent power equals constant sections C-D results
from stator end heating, if applicable.
The limit line in the under excited range may be exceeded slowly when the
system voltage slowly increases during light load operation. With the generator
voltage kept constant by the voltage regulator, this causes the over excited reactive
power to be reduced or the under excited reactive power to be increased. Exceeding
of the limit line can in this case be prevented before the under excitation limiter is
activated by changing the limit. Transformer tap changer position early enough or,
if no tap changer is provided by increasing the generating voltage or by switching
measures in the systems.
The limit line may also be exceeded quickly for example due to switching
procedures in the systems (connection of lines) or incorrect operation of the unit
Xmer tap changer. This requires automatically initiated measures on the voltageregulator equipment to returned in to the permissible range by increasing the
generator voltage. This must be performed quickly enough to prevent generator
tripping via the under voltage operation systems. Increasing of the generator voltage
can then be cancelled by switching measures such as changing the unit Xmer tap
changer position.
Figure.1 shows the basic circuits required to form a response
characteristics which corresponds to the limiting characteristics in the under excited
range of the capability curve and which further more permits representation of a
straight line to take in to consideration the stator and heating in the under excitedrange if required. For this purpose, three line to line generator voltage actual value
in the form of a dc signal which both signals are required.
The generator current is converted across the resistor R3 in to a proportional
ac voltage and this applied via the potentiometers R1/R2 to the phase controlled (by
the generator voltage) rectifies V1/V2. These form a signal proportional to the
reactive current Ixsin or active current Ixcos; the potentiometers R1/R2 are used
to standardise the signals.
The response characteristics of the under excitation limiter is shown
deriving from the reactive capability curve in reactive/ active current co ordinates.
18
-
7/29/2019 AVR Study Report
19/48
The reason is, that pole angle of stability observations the foot A on the reactive
current axis must be shifted proportional with the generator voltage. The curve A-
B-C shifts proportionally away from the active current axis when the voltage rises;
similarly, this distance drops when the voltage drops.
The foot pond A is forced by comparing the generator reactive current andthe generator voltage. The reactive current is applied through a fixed resistor, the
generator voltage through potentiometer R4 to the summation amplifier N3; the
setting of the potentiometer R4 determines the position of the point A. point B
(potentiometer R5) is formed by comparing the active current with the generator
voltage. As soon as the active current exceeds the value according to point B, the
amplifier N1 issues an additional signal to the sum amplifier N3. The
proportionality factor for this signal depends on the setting of potentiometer R6,
which sets the angle B. the limit characteristics A-B-C of the reactive capability
diagram, is thus simulated. The active current value is smoothened before beingused in forming the response characteristics to a degree, preventing response of the
under excitation limiter due to pole angle oscillations.
If further bend in the characteristics is necessary due to stator end heating the
amplifier N2 supplies the signal, potentiometer R7 determines the point C,
potentiometer R8 angle . Since stability observations are not important for this
bend, the active current is not compared with the variable generator voltage but it is
a fixed voltage value. The limitations signal to amplifier N2 limits the length of the
bend to the part C-D with the purpose of avoiding and undesired rise in excitation in
the over excitation range. Behind point D the response characteristics runs parallel
to the steeper bend.
The out put voltage of amplifier N3 is proportional to horizontal distance =
the reactive current distance on the operating point from the response
characteristics. When the response characteristics is exceeded its output polarity
changes from minus in the permissible range to plus in the non-permissible range.
Proportional amplifiers N1 refer to fig-2 limits the first correcting action on the
voltage regulator required when the response characteristics are exceeded quickly.
This action is limited by the amplifier N2 to increasing the deviation from the
response characteristics on the response side.
Integrator N4 that is also controlled by the deviation from the responsecharacteristics i.e. directly and in addition via the output voltage of proportional
amplifier N1 ensures the permanent and accurate setting.
The out put signal of proportional amplifier N1 and of integrator N4 (both
negative) are added in voltage regulator with reserved signal then influence the
amplifier input for comparing the positive voltage set point and the negative actual
value. The result is that the excitation and generator voltage increases until the
deviation from the response has been eliminated.
Remaining increase of the generator voltage is limited by the limitation of the
integrator, which depends on the position of the potentiometer R9 and via
19
-
7/29/2019 AVR Study Report
20/48
potentiometer R8 on the position of the set point adjuster for the generator voltage.
The setting can for example be carried out in a way to ensure that independently of
the position of the generator voltage is set point adjuster on increase up to 1.1 times
rated voltage is possible the limitation thus is shifted with the position of the set
point adjuster.The adjustable limit monitor gives a signal to the control room on response of
the integrator. The pick up value of the limit monitor may be chosen, example to
indicate the occasion for changing the unit transformer tap with the aim to reset the
generator voltage to normal value.
20
-
7/29/2019 AVR Study Report
21/48
3.6 Over excitation limiter
The operating state of the generator with rated excitation current determines
the section EF in the over excitation range of the capability curve. The rated
excitation current may only be temporarily exceeded.If the system voltage drops due to reactive power requirements switching
procedure or faults, the voltage regulator increases the generator excitation in order
to keep the generator voltage constant. Thermal overloading of the exciter and
generator rotor can arise due to large drop in the system voltage if the operator does
not reduce the set point for the generator voltage or if the ratio of unit transformer is
not re adjusted.
The purpose of the over excitation limiter in this case is to automatically limit
the generator excitation by reducing the generator voltage. The limitation of the
generator excitation can afterwards be replaced by changing the ratio of the unittransformer provided it has an on load tap changer.
From the circuit diagram of the over excitation limiter the actual values for
the over excitation limiter is the field current of the main exciter coming from a
shunt via transducer.
The amplifier N4 compares the actual value with a set point value preset by
potentiometer R2 normally to 100-105% rated excitation. The gain is set by
potentiometer R4 such that 140% rated excitation produce a 10 Volt signal at the
output of N4. The shortest response time of the over excitation limiter is assigned to
this signal. The limiting voltage from potentiometer R3 prevents a larger value.
The output voltage of the amplifier N4 is normally positive (excitation
current
-
7/29/2019 AVR Study Report
22/48
1. Thermal protection of the generator field winding (by limitation of the
excitation) on the one side, by adoptions of the generator voltage to a reduced
grid voltage level.
2. Support of the system and station supply voltages (by over excitation) in
case of system voltage drops on the other side. Integrator N5 allows for aresponse time, which is inversely proportional to the control deviation.
The shortest response time using standard settings amounts to 10 seconds.
This value ensures that the over excitation limitation does not influence the
effectiveness of over current relays within the scope of the generator protection
system.
The over excitation limiter is again made inoperative if excitation drops
below the response value for a short period of time by 3.3% for 2 minutes.
The main exciter is equipped with a measuring coil for the generator
excitation current. The AC signal supplied by this coil is rectified and watched andtransmitted to an instrument, which indicates the generator excitation current in the
control room.
The over excitation limiter is supplemented by a stator current limiter, which
in principle works the same way. It is operative only in the overexcited part of the
capability diagram i.e. in the part of the curve D-E. Lowering of the generator
excitation in the under excited area of the diagram would increase the stator current
instead of limiting it. Therefore a limit monitor disables the limiter, when the
reactive current falls short often-adjustable reactive current limit.
The output signal of the over excitation and stator current limiter go through
diodes to the comparator point of the generator voltage regulator. If both limiters
respond, only the larger signal will influence the voltage regulator.
22
-
7/29/2019 AVR Study Report
23/48
3.7 Actual voltage feedback signal
This module is mainly used in automatic voltage regulators of large
alternators for forming, adjusting and amplifying the actual voltage feedback signal,
for adjusting and amplifying the voltage reference signal, for summing andamplifying additional control signals and for providing components for shaping the
response of amplifiers in the automatic voltage regulators.
Mode of operation
Voltage transformers are used to provide six voltages (24volts, 50/60Hz),
which are proportional to the alternator voltage. This form the input signals to the
module and is rectified by the six diodes. The rectified and summed voltages are fed
to a decoupling amplifier via a potential divider. The decoupling amplifier output
the actual value feedback signal of the alternator voltage; this is used for control andmonitoring functions.
A further decoupling amplifier used to feed the voltage reference signal to the
various control functions, the reference signal being obtained from a remote
motorised setting potentiometer. The module also contains potentiometers for the
presetting the basic voltage reference and the bandwidth of the variable voltage
component.
23
-
7/29/2019 AVR Study Report
24/48
3.8 Fault indication and automatic change over to manual
Following alarms are issued from the voltage regulator to the control room.
1. AVR fault,
2. AVR, automatic changeover to MANAUL,3. AVR, loss of alarm voltage.
The group alarm AVR fault collects the individual alarms; refer to the
functional diagram. The initiating individual signal (s) is (are) stored and can be
identified locally (in the voltage regulator cubicle) by means of LEDs.
The initiations-
1. Power supply AUTO,
2. Generator voltage actual value,
3. Thyrister set AUTO,
4. Faulty over excitation.Causes automatic changeover to MANUAL, unless changeover is not blocked
due to a fault in the excitation current control (MANUAL). Changeover can also be
blocked in either direction by switches provided locally in the voltage regulator
cubicle if components of MANUAL or AUTO are not ready for operation. This
blocking takes effect both for automatic and manual commands.
Fault conditions initiating automatic changeover also cause the alarm AVR,
automatic changeover to MANUAL to be given. The Power supply AUTO
alarm initiating automatic changeover occurs in the event has under voltage in the
stabilised 15 volts power supply for the automatic voltage control and the
associated gate control set. The alarm Alternator voltage actual value is initiated
either by tripping of the voltage transformer MCB for the generator voltage actual
value, or by the generator voltage actual value monitor. Response of the current
flow monitoring system initiates the thyristor set AUTO alarm. The alarm faulty
over excitation is with only a short delay initiated by the field forcing limitation
monitor and additionally by a generator reactive current monitor as follows:
The above-mentioned field forcing limitation monitor responds above 1.65*
Rated excitation approx. at operating temperature of the machine, at somewhat
higher value if the machine being cold. Lower excitation values are limited with
delay by the over excitation limiter.
24
-
7/29/2019 AVR Study Report
25/48
3.9 Compensation
The purpose of the compensation is to generate an increase in the controlled
generator voltage proportional to the reactive current to partly compensate for the
voltage drop in the unit transformer. For this reason signal available from the underexcitation limiter which is proportional to the reactive current is applied to the
comparator point for the generator voltage set point and actual value. The effect
referred to a reactive current = rated current of the generator is adjustable between 0
and 0.1 X-rated voltage.
As a result of partial compensation of the voltage drop across the unit
transformer the voltage regulator reacts more pronounced to changes in the voltage
drop between the generator and the grid. Change n reactive power associated with
the change in voltage drop becomes noticeably bigger.
For this it is irreverent whether the voltage change occurs on the grid side orwhether it is purposely introduced by set point changes or by tap change in the unit
transformer. The change in the controlled generator voltage with the reactive
current should be noted with respect to a station supply possibly connected to the
generator terminals and because of the voltage limits of the generator.
If the generator is operating in parallel with other generator via the unit
transformer on to a common bus bar then the voltage drop may be compensated to a
maximum residual of 4 to 6% otherwise changes in the set point or of the unit
transformer tap would result in substantial cross currents between the generator.
The same applies with the parallel operation of individual generator with the grid.
The voltage regulator of large generators is preferably operated with out
compensation. The decision whether compensation is suitable requires individual
consideration or local operation experience.
25
-
7/29/2019 AVR Study Report
26/48
3.10Monitoring of generator voltage actual value
For the automatic voltage regulation the generator voltage actual value is
sensed as the average of the three line to line voltages. Drop of this actual values by
blowing of a voltage transformer fuse or by an interruption in the inter connectionin the voltage regulator or in the circuits of the intermediate voltage transformer and
associated rectifier would cause the generator to increase the excitation and
generator voltage to improper and dangerous values.
An adequate action in this case is immediate change over to manual that is
the separate regulator for the exciter field current as this current regulator is
automatically tracked according to the automatic voltage regulator normal
excitation is restored and tripping of the machine is avoided.
For this purpose the three phase secondary voltage from a second set of
voltage transformer is required. After reducing the voltage level by intermediatevoltage transformers the average of the voltage is formed and compared to the
corresponding signal from the first set of voltage transformers by means of
differential amplifiers.
Voltage drops incoming from the grid cause both signals to change by small
amount and the output of the differential amplifier will remain zero. But a failure
arising in the circuit of the first set of voltage transformers only will produce
positive output voltage on the differential amplifier output. This will be detected by
a connected limit monitor if the response limit adjusted is exceeded. The response
limit is to be set so that interruption of the phase will be determined safely.
A failure in the circuit of the second set of voltage transformer will produce a
negative output voltage signal on the differential amplifier output, which is not
evaluated. The response of the limit monitor is evaluated for a single alarm
Generator voltage actual values, automatic change over to manual, a group alarm
AVR fault, and an alarm AVR automatic change over to MANUAL.
26
-
7/29/2019 AVR Study Report
27/48
3.11 Volts per Hertz limiter (V/F Limiter)
The voltage regulator keeps the generator voltage constant independent of the
generator frequency. Excitation of the generator with excessive under frequency
value is prevented by speed dependent enabling of the excitation at speed values of0.95 pu or by blocking speed values of less than 0.9 pu approximately. This means
that the excitation equipment permits excited operation of the generator with
frequency deviation up to 0.1 pu below normal frequency.
The magnetic flux of the unit transformer is directly proportional to the
terminal voltage and inversely proportional to the frequency i.e. proportional to the
ratio V/Hz.
Excessive magnetic flux increases thermal stressing of the unit transformer
and of the generator. The function of the V/Hz limiter is to issue a signal when a
present V/Hz limit value is exceeded and to reduce this value to the permissiblelimit.
The ac generator voltage is transferred to level of 8V approximately by an
intermediate transformer and then fed to frequency voltage converter. The dc output
voltage of this converter is proportional to frequency and amounts to +8V at rated
frequency.
At the proportional amplifier N1 the frequency proportional signal is
compared against a dc signal proportional to the generator voltage. The generator
voltage proportional signal is adjustable to potentiometer R1 the setting of which
determines the pickup value of the V/Hz limiter. The setting range is 7.2 to 8.0
volts approximately corresponding to V/Hz limit pickup value setting of 1 pu to 1.1
pu.
The V/Hz limiter responds when the output of the negative generator voltage
signal exceeds the amount of positive frequency signal. The output voltage of the
amplifier N1 then changes from negative to positive side. The normally negative
output voltage is fed to the input of the integrator N2, the output voltage of the latter
then being +11V app.. The out put voltage of the integrator N2 changes to negative
values when the pickup level of the V/Hz limiter is exceeded.
The output of the integrator N2 is reversed by reversing stage N3 the output
of which being positive on pickup of V/Hz limiter. Positive output voltage ofamplifier N3 biases the comparator between the set point and actual value of the
generator voltage in the regulator. This simulates a too high voltage to the voltage
regulator and returns V/Hz ratio to the set response value.
When integrator N2 changes its initial output potential the capacitor across
the integrator becomes charged in the opposite direction, the rate of change at the
output of N2 depending on the input current of N2.
27
-
7/29/2019 AVR Study Report
28/48
The V/Hz limiter thus has a response time which is shorter to greater the
V/Hz ratio deviates from the set value. It depends also on the size of the capacitor
and setting of the potentiometer R3. the setting of potentiometer R2 determines on
which deviations of the V/Hz ratio from the set level. Output voltage of +11V willappear at amplifier N1 determining the shortest responsible possible.
When the output of amplifier N3 changes to positive voltage an electronic
limit switch will give a signal to the control room to draw the attention of the
operator to the abnormal situation.
Normally when the unit transformer is more vulnerable with respect to V/Hz
value than the generator is. It must be observed that deviation response time
characteristics is of the type
T= C/deviation.
Where C is the constant value but with a constant response time value aftercertain deviation is exceeded.
28
-
7/29/2019 AVR Study Report
29/48
CHAPTER - 4
Power System Stabiliser (PSS)
Application of power system stabilizer (PSS) is to improve the dynamic
performance of a power system. The most widely employed PSS is the lag-lead type
where the gain setting is fixed at certain values, which are determined under
particular conditions. The operating point of power system drifts as a result of load
changes or major disturbances such as 3-phase faults. To take care of machinery
during such critical conditions PSS is necessary.
In presence of AVR oscillations of the rotor can be de-stabilized due to negative
damping torque. To make the system stable it is required to provide some other
means of damping so as to make the total damping torque positive, modulating
some control quantity does this.The necessary condition for damping are
1) The oscillations should be seen in the quantity, which is used, as the
modulating signal. For example speed deviation and power output of the
generator-modulating signal should also be easily measured and should be
less susceptible to noise.
2) Variation of the controllable quantity should be able to cause an adequate
variation in the torque. E.g. Input mechanical torque, however it is not
practically feasible due to slow response of the turbine control system.
Another option is to control the voltage reference of AVR or of HVDC andSVC control in the systems.
3) The controller should modulate the controllable quantity approximately using
the modulated signal so that damping torque is produced at the rotor
oscillations frequency.
The most widely accepted and inexpensive way to achieving stabilizer is to
modulate the voltage reference of the AVR using speed/power/bus frequency
signals. The controller in each case will be different since these oscillations are not
in phase with each other.
29
SYSTEM
CONTROLLER
MODULATED
SIGNAL
MODULAT
ED QUANTITY
-
7/29/2019 AVR Study Report
30/48
4.1Structure of PSS
The main objective of the PSS is to increase the power transfer in the
network, which would otherwise be limited by oscillatory instability. The PSS must
also function properly when the system is subjected to large disturbances.
WASHOUT CIRCUIT: -
The washout circuit is provided to eliminate steady state bias in
the output of the PSS, which will modify the generator terminal
voltage. The PSS is expected to responds only to transient
variations in the input signal and not to the dc offsets in the
signal. This is achieved by subtracting from it the low frequency
component of the signal obtained by passing the signal through a
low pass filter.
Gw(s)= sTw / (1+s Tw) = 1- 1/(1+s Tw) = 1- Glp(s)
DYNAMIC COMPENSATOR: -
The compensator should modulate the controllable quantity
appropriately using the modulating signal so that damping
torque is produced at the rotor oscillation frequency.
TORSIONAL FILTER: -
The torsional filter in the PSS is essentially a band reject filter to
attenuate the first torsional mode frequency. The transfer
function of the filter can be expressed as
FILT(s) = Wn2 / (s2 + 2 Wns+Wn
2)
Torsional filter is necessitated by the adverse interaction of PSS
with the torsional oscillations. This can lead to shaft damage,
particularly at light generated loads when the inherent
mechanical damping is small even if shaft damage does not
occur; stabilizer output can go in to saturation (due to torsionalfrequency components) making it ineffective.
LIMITER: -
The output of the PSS must be limited to prevent the PSS acting
to counter the action of AVR. For example when the load
rejection takes place the AVR acts to reduce the terminal voltage
when PSS action calls for higher value of the terminal voltage
(due to increase in speed/frequency). It may even be desirable to
trip the PSS in case of load rejection
30
-
7/29/2019 AVR Study Report
31/48
The negative limit of PSS output is of importance during
the back swing of the rotor (after initial acceleration is over).
The AVR action is required to maintain the voltage (and thus
prevent loss of synchronism) after the angular separation has
increased. PSS action in the negative direction must be curtailedmore than in the positive direction. Recent studies show that
higher negative limit can impair first swing stability.
31
sTw
1+sTw
Gc (s) Gf(s)
Vs max
Vs min
LIMITER
TORSIONAL
FILTER
COMPENSATORWASH OUT
CIRCUIT
MODULATING
SIGNAL
-
7/29/2019 AVR Study Report
32/48
CHAPTER 5
New Trends -Digital Voltage Regulator
(DVR)Control of the voltage and reactive power of synchronous machine has been
so far achieved mainly with analog control amplifier in excitation equipment. In
these, the control signal is formed by continuous comparison of the measured actual
value with required reference values available in the form of dc voltage. The control
signal varies the output of thyristor-controlled rectifiers, provided as power stage,
by shifting the firing pulses. The pulses are generated in gate-controlled units
provided with discrete components.
The analog control amplifiers having general met the requirements of controlspeed and adaptability to control systems. However automatic diagnostics features
such as self-monitoring and fault detection, often required in present-day systems,
are difficult to be incorporated. Also the number of modules required for
configuring systems with complex control such as limiters, stabilizers etc are many.
With the introduction of fast microprocessor, modules are now available,
which can meet the highly demanding task in the field of AVR. These modules can
also be used for various sub systems in excitation equipment such as monitoring,
protection and control thus forming the decentralize digital voltage regulator.
Features of digital voltage regulator are:-
1] Self-monitoring of the modules.
2] Ease of setting and measuring of the variables, using local micro terminal.
3] Settings which are digital i.e. they are exactly reproducible and are not subject to
variation over long period of time.
4]. Digital firing and control module having stable behaviour even with distorted
synchronous voltage.
5]. A significantly small no of different modules.
6]. Easy adaptation of customers individual requirements.
7]. The maximum converter out put voltage can be reached in less than 20mssignifying a very fast control response.
32
-
7/29/2019 AVR Study Report
33/48
5.1 The digital voltage regulator philosophy.
For voltage regulation of synchronous machines several special conditions
have to be met. An important factor is the measurement of the active and reactive
power and derives variables such as load angle and power factor. The actualmeasurement is made by measuring the instantaneous values of the current as the
A.C voltage passes through zero.
As the phase voltage passes through zero from positive to negative, the
instantaneous value of the current corresponds to the value of the reactive current.
As the line voltage passes through zero from negative to positive the instantaneous
value of the current corresponds to the value of active current.
Thus reactive current can be measured six times in each period as the phase
voltage passes through zero and the active current can be measured six times as the
line voltage passes through zero. An interrupt generator is used to produce 12 pulsesin each period, which among other functions, are used in determining the active and
reactive components of the current.
When short circuit occur close to the generator. The response time of the
regulator must be very short. This means that after the short circuit event, the
converter out put voltage must reach 95% of its maximum value within 20ms. In the
digital voltage regulator the control signal is computed periodically from the
measured actual value and the reference values, there fore the calculation must be
repeated at every short interval of time in order to meet the requirement.
The transfer function of the voltage regulator represents an important
parameter while studying the stability of the network. The transfer function of the
digital voltage regulator remains the same as that for analog voltage regulator.
Amplification factor and time constant, which are known from the analog regulator,
can be used as initial input parameters during commission.
33
-
7/29/2019 AVR Study Report
34/48
5.2 Functional layout Description: -
It consists of a single channel regulator. Heart of the system is C.P.U and is
connected to various peripherals through address bus, serial I/O and control bus.
Data processing is synchronized by clock pulses of 12MHz derived from internalfrequency generator. Voltage and current measuring modules measures the
generated voltage, current and field current. An important function of this module is
to produce interrupt pulses in relation to the point where the generator voltage
passes through zero. These pulses are required for measuring active and re active
currents.
Analog and digital conversions of measured values is done through A/D
conversion module. This module lies before the voltage and current measuring
module. Digital I/O module is used for D/A conversion. Central processing unit
accepts the measured values in digital forms in synchronism with interrupt pulses.The pulses are synchronized by input A/C voltage of thyristor converter equipment.
Central Processing Unit
C.P.U uses 16-bit microprocessor, which can be used for any application. The
module has 64 KB of memory. The memory sub divided into to different blocks.
1) EPROM with basic programs
2) EPROM program to suit the customer requirement.
3) Free for future use.
4) EE-PROM for setting reference values.5) RAM as working memory.
The digital voltage regulator is capable of performing wide range of function which
are as follows:-
a) Control of generator voltage.
b) Limitation of field current.
c) Limitation of load angle.
d) Limitation stator current.
e) Damping of active power oscillations.
f) Number of supplementary functions.The following subroutines are called at every second interrupt pulses:-
a) Formation of generator voltage actual value signal.
b) Reference and actual value difference.
c) P.I.D algorithm.
Digital pulse generator
Regulator described above. In addition to the main function of generating
double pulses the module has a number of auxiliary function to meet specific plant
requirement .
34
-
7/29/2019 AVR Study Report
35/48
1) Filtering of heavily distorted synchronizing voltages due commutation in
thyristor. This is done with data registers.
2) Correction of gate triggering angle proportional to changes in frequency with
respect to the rated frequency.
3) Blocking of the gate pulses to the inverter region through an external signal.4) Monitoring and limiting of field current. To prevent slip rings short circuit
5) Gate pulses can be adjusted any one of the following of the methods
1) The voltage regulator control output.
2) The internal reference value.
3) Internal field current controller.
Additional feature with microprocessor hardware within the excitation
equipment.
The central processing unit describe earlier can also be used for another sub
systems within the excitation systems. In the additional to the excitation sequence
control and excitation monitoring both describe below.
Rotor temperature measurement.
35
-
7/29/2019 AVR Study Report
36/48
Excitation sequence control
Excitation systems depend on the individual plant requirements and often
require to be modified during commissioning. As result software has been designed
in a simple way so that it is easy to program and specialized programmer isrequired.
The arrangement of the excitation systems is simple as shown in the fig. The CPU
communicates with the digital I\O module and with the alarm indication module.
Data exchange with plant systems is done with digitally isolated contacts for inputs
and potential fed contacts for outputs.
When CPU is used for sequence control the memory allocation is as follows.
1) Block 1 EPROM containing the operating systems, which interprets the
functional blocks of the programming language.
2) Block 2 EPROM contains the user program
3) Block 3 reserved for future use.
4) Block 4 EEPROM for intermediate storage of auxiliary values so as to reduce
computation time.
5) Block 5 RAM working memory.
Program cycle is 20ms.
36
-
7/29/2019 AVR Study Report
37/48
5.4 Excitation monitoring-:
The analog signals of generator voltage and current are converted into digital
form by A\D converter and are fed to the CPU. Through the data and address bus.
Signals from the current monitoring CTs go through the central processing moduleunit through another current flow monitor module. Data exchange with the control
sub systems takes place through the digital I\O module.
With this subsystem following functions can be performed.
Monitoring the actual value signals of the generator voltage and field current.
Monitoring the Thyristor current flow.
Protection of Thyristor against the over load.
Generation of voltage reference.
Monitoring if temperature reference values for stator and rotor current in gas turbine
application.
5.5 Excitation protection:-
The field current is converted in to the digital form by A\D converted module
and then fed to the CPU.
The module performs the following functions.
Over current protection. (Instantaneous)
Over current time delay form an inverse time characteristics.
i) Local operation.
The micro terminal is provided with the keys for setting the reference values
and with the plug in connections. Which can be connected to the memory blocks. A
LCD provides simultaneous displays of four addresses and their corresponding data.
The most important data and setting appear directly in alphanumeric form. With
keyboard the data can be modified.
ii) Self monitoring: -
The self monitoring function in the various modules represents important
advantage over the analog equipment. Faults within the controller and the pulse
generation module are detected immediately. With this feature and with redundant
equipment automatic change over to the stand by channel is done before the fault
can affect the excitation current.
37
-
7/29/2019 AVR Study Report
38/48
Self monitoring includes the following functions.
a) Program sequence check.
This consists of an independent counter which is periodically reset to zero by
internal pulses in the program. If the counter runs over a limit, it indicates aprogram fault.
b) Interrupt pulse monitor: the 12 interrupt pulses per period are counted and at
the same time the internal clock timer responsible for producing interrupt
pulses, is also monitored during under frequency or over frequency
conditions.
c) The A\D and D\A converters checked periodically by feeding the analog out
puts of the D\A converter back to the A\D converter during the short pauses
in the program. The converted values are then compared with the input
values.d) The digital input and output modules are checked periodically.
e) The pulse out put from the digital firing and control module are checked for
short circuit.
f) The out put voltages of the power supply modules are monitored.
38
-
7/29/2019 AVR Study Report
39/48
CHAPTER 6
Distributed Digital Control System
(DDC)DDC is an integrated solution for control and monitoring of power plants. A
complete plant automation system provides the operating personnel with necessary
tool to increase plant availability and efficiency. The automation system
automatically controls and monitors plant operating systems, plant start up and shut
down. The operation is improper when the plant operates in unpredictable manner
the DDC helps in quick recovery of plant in such critical conditions. It prevents
chain tripping of the power plant.
The complete goal of the plant automation can only be achieved whenoperating personnel can rely on the automation system and are released from the
cumbersome control duties. Thus the operating personnel can concentrate on the
over all plant behaviour and on the preventive maintenance. Enunciation concept
ensures the operator that the automation system actions are correctly achieved based
on plant data.
Applications of DDC: -
1. During plant shut down and start up
2. During stable generation of power3. During major changes
Features of DDC: -
1. Modular electronics
2. Programmable processor
3. Data acquisition
4. Remote multiplexing
5. High data transmission speed
6. Redundant multi channel configuration.
DDC is an automation system with microprocessor based intelligent
multiplexing system. The system is designed on a modular basis and allows
tightening the scope of control hard ware to particular control strategy. The DDC
provides signal conditioning and transmission, modulating controls, on off logic
sequential control, individual and process protection, man machine process
interface.
Communication: -
1. Serial bus technique is utilised.
2. Very high data transmission speed for real time control.
3. Purely cyclic mode of operation.
39
-
7/29/2019 AVR Study Report
40/48
4. Redundant fault tolerant.Control of the plant: -
1) Functional distribution of control functions.
2) Geographical distribution of control hard ware.
Data transmission: -
Data transmission takes place over two buses.
1) Intra plant bus (IPB).
2) Local bus.
Local bus: - Local bus connects all the I/Os and processing electronic modules
which are part of the station. Each local bus is independent of other local bus and
intra plant.
Intra plant bus: - connects local buses coaxial cable. IPB and local busconnected to each other through bus couplers.
Local bus and intra plant bus use serial communication with time division
multiplexing. Message format is based on broadcasting state information in secure
address message.
The features of this technique are as follows.
1) No side effects of function execution because each message is addressed
exclusively by its source address.
2) Convenient monitoring of running system because each message identifies its
source.
Hardware: -
The system has two types of processing modules.
1) Individual control module.
2) Universal processing module.
Individual control module: -
The module implemented to control supervise monitor and protect one
individual final control element of any type such as valves, pumps, fans etc. the
module equipped with microprocessor. The input allows gathering data on the
position status of final control element as well as the status of a related poweramplifier.
The output allows ON/OFF or 4-20 mA control signals. A serial I/O inter-
phase to local bus is available. This link is mainly used to receive process signal
required for interlock and permissive logic within the control logic.
Universal processing module: -
Module is utilized for two different applications.
Automation unit, functionally superimposed on individual control module.
40
-
7/29/2019 AVR Study Report
41/48
Combining individual control and automatic function the universal processing
module has larger and fast programming capability. This later allows to perform
long and complex functions.
Universal processing module can perform various arithmetic and logic
functions like PID, AND, OR, Summation, Subs traction etc.
Man process interface: -
Overall man process interface is the actual interface between the plant
management operating and maintenance personnel. The function includes.
1) Operator station.
2) Plant monitoring system.
3) Engineering station.
Operator station: -Operator station consists of conventional station like push buttons; lamp
indicators or CRT based station. Both this techniques can be implemented. The
station gives the operator possibility to give orders to individual control loops. The
CRT based station provides the possibility to tune individual control loops. The
simple function like mimic displays, bar charts, and trends of the process variable is
possible.
Plant monitoring system: -
PMS informs the plant personnel of overall plant behaviour and historical
data. This data allows the plant management, operator and maintenance personnel
to take decision in regard to scheduling of plant, a maintenance outage, and
operation of plant and recording of plant data.
The PMS system via CRT provides printouts, hardcopies of plant real and non-
real datas. The various datas observed through PMS are: -
1) Plant efficiency.
2) Lifetime calculation and monitoring.
3) Early detection of deterioration of process components.
These datas are indicated bar charts and mimic displays.
Engineering station: -
The engineering station allows to dialogue and record control systems
internal disturbance. Station also allows programme control schemes directly via
CRT and keyboards.
41
-
7/29/2019 AVR Study Report
42/48
CHAPTER 7
TECHNICAL SPECIFICATIONS OF
D.T.P.S
Salient features
i. Type of station : Thermal
ii. Station Capacity : 500 MW (2x250 MW)
iii. Fuel : 100% coal
(100% gas firing
arrangement for future)iv. Coal Source
MCL : LOCM ,LOCM II, LOCM III
BOCM, NEW BOCM,
SECL : GEWARA, NEW GEWARA, NEW
KUSMUNDA, MANIKPUR.
PRIVATE : THALCHAR (A GRADE)
IMPORTED : AUSTRALIAN COAL
Transportation : By rail & sea
Consumption : 2.56 million tones per year
assuming 8000 Hrs. of operation
v. Cooling water, Source : From Arabian Sea
vi. Consumptive Requirement : 76000 M/Hr
vii. Ash disposal : Wet Ash Disposal system.
viii. Chimney : RCC multiflue (2 Flue) chimney
with flue height 275 M high.
ix. Design Heat Rate : 2250 Kcal/Kwh at 3% make up
x. HP/LP Bypass capacity : 60 % MCR
xi. Land Requirement (In Acres)a. Plant area : 351.58 Hectors
b. Ash disposal area : 370 Hectors
c. Colony area : 100 Hectors
---------------
TOTAL : 821.58 Hectors
42
-
7/29/2019 AVR Study Report
43/48
Boiler
i. Manufacturer : BHEL (C.E. Design) TIRUCHIRAPALLY
ii. Type : Natural circulation, Balance draft, Double
pass, Single drum, Single reheat, DirectPulverised Coal Fired Water Impounded
Bottom. (Gas firing & Gas regulating
system, provision for future).
iii. Boiler Design Pr & Temp. : 182.5 Kg/cm2 & 540O C
iv. Boiler Designation : 15240 199 63 .5
11506 142 63 .5
v. Type of Firing : Tilting Tangential
Steam Turbine
i. Make : BHEL, KRAFT WERK UNION
DESIGN (GERMANY)
ii. Rated Load : 250 MW
iii. Max. Load under Valve Wide Open : 262 MW
(VWO) condition
iv. Overall Length (Meter) : 17.75
v. Overall Width (Meter) : 12.20
Rated speed :50.0 Hz
Generator
i. Make : BHEL, HARDWAR
ii. Type : THRI 108/44
iii. Code : IS: 5422, IEC - 4
iv. Stator winding cooling : Indirectly hydrogen cooledRotor Winding cooling : Directly hydrogen cooled
v. MW rating : 250
vi. MVA rating : 294.1
vii. Rated terminal voltage : 16.5 KV
viii. Rated Stator current : 10286 amps
ix. Rated power factor : 0.85 Lag
x. Rated speed / frequency : 3000 rpm / 50 Hz
43
-
7/29/2019 AVR Study Report
44/48
Excitation system
i. Make : BHEL, HARDWAR
ii. Type : Brush less Excitation system
With Rotating Diodesiii. Main Exciter
a. Type : ELR70 /62-30/ 6-10
b. Active Power : 1350 Kw
c. Rated current : 3200 amps
d. Rated voltage : 420 Volt
e. Frequency : 50 Hz
iv. Pilot Exciter
a. Type : ELP50 /29-30/ 16b. Apparent power : 35 KVA
c. Rated current : 105 amps
d. Rated voltage : 220V 22V
e. Frequency : 400 Hz
f. Speed : 50 cycles /sec
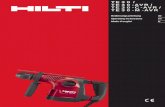
BRUSHLESS EXCITATION SYSTEMTECHNICAL SPECIFICATION
a.) Pilot Exciter
i. Manufacturer BHEL
ii. Type ELP 56/29-30/16
iii. Type of drive Direct coupled
iv. Normal speed (r.p.m.) 3000
v. Rated Voltage (Volts) 220
vi. Rated frequency (Hz.) 400
vii. Rated Current (amp.) 105
viii. Type of insulation SPUN GLASS
b) Main Exciter
i. Manufacturer BHEL
ii. Type ELR 70/62-30/6-10
iii. Type of drive Direct Coupled
iv. Normal Speed (rpm) 3000
v. Rated rectified Voltage (Volts) 420
44
-
7/29/2019 AVR Study Report
45/48
vi. Rated rectified current (amp.) 3200
vii. Ceiling rectified voltage (Volts) 600
viii. Ceiling rectified current (amps) 4500
ix. Exciter field voltage with manual control
(Rectified)
Maximum (Volts) 74.0
Minimum (Volts) 15.0
x. Field Current at generator MCR and rated power
factor lagging (amp) 2388
xi. Nominal exciter response ration 72.0
xii. Class of insulation F
xiii. Insulation material on rotor winding MICALASTICxiv. Insulation material on field winding SPUN GLASS
xv. Type of end winding support STEEL BANDAGE
xvi. Guaranteed maximum temperature with secondary
cooling water temperature as per specification
As per IEL
Exciter stator winding in contact with insulation
Rotor winding
c) Exciter rectifier assembly
i. Manufacturer BHEL
ii. Type of rectifier SSOL/2120
iii. Total number of rectifier cells per ring 30
iv. Number of parallel paths per bridge arm 10
v. Number of bridge arms 6
vi. Maximum number of exciter cells/bridge without
which the rectifier can give output corresponding to
generator MCR 2
vii. Max. peak inverse voltage rating of cell (volts)
2000
viii. Number of rectifier cells in series in each bridge
arm 1
ix. Method of over voltage protection RC-NETWORK
x. Overload rating of the rectifier cell 370 A for 10 sec.
xi. Ceiling output voltage of rectifier assembly (Volts) 600
xii. Ceiling output current of rectifier assembly (Amp.) 4500
45
-
7/29/2019 AVR Study Report
46/48
xiii. Maximum junction temperature of rectifier cell 90O
xiv. Method of mounting cells to cooling fins SCREWD
xv. Make and type of cooling fins HEAT SINK
xvi. Type of visual indication provided for faulty
rectifier cells STROBOSCOPE
xvii. Ceiling duty duration (Sec.) 10 Sec.
d) Air/Water Coolers (For exciter)
i. Number of coolers 2 x 50%
ii. Material of
Tubes 90/10 Cu Ni Base tube
Fines Copper
iii. Material of tube plates Carbon Steel
iv. Material of water boxes --do--
v. Quantity of circulating water required per cooler 130 M3 /hr
vi. Maximum allowable water 38
e) Gas system data
i. Volume of hydrogen space in generator 69 m3
ii. Cooling gas flow 1800 M3 min
iii. Volume of CO2 at NTP required for displacing
hydrogen 138 m3
iv. Volume of H2 at NTP required for displacing
carbon di-oxcide and to bring the casing to the
rated pressure380
v. Volume of CO2 at NTP required for displacing air 138 m3
vi. Purity of H2 required (%)
Normal 98
Minimum allowable 96
vii. Leakage of H2by volume at NTP per day at rated
H2pressure in the generator
-
7/29/2019 AVR Study Report
47/48
Carbon dioxide 40
Nitrogen --
xii. Standard to which the cylinders conform
Hydrogen IS:7285
Carbon dioxide ----do--
Nitrogen --
xiii. Internal volume of the Cylinders
Hydrogen (m3) 80
Carbon dioxide (m3) 40
Nitrogen (m3) --
47
-
7/29/2019 AVR Study Report
48/48
CHAPTER 8
References
1. BHEL manuals on AVR THYRISEM 04
2. BHEL manuals on DDC PROCONTROL-P
3. Power system stability by Prabha Kundur
4. Reports on PSS.