Autonomous Truck Supervisory System Design Overview by Ray Burns.
76
Autonomous Truck Supervisory System Design Overview by Ray Burns
-
Upload
daisy-newman -
Category
Documents
-
view
212 -
download
0
Transcript of Autonomous Truck Supervisory System Design Overview by Ray Burns.

Autonomous Truck Supervisory System
Design Overviewby Ray Burns

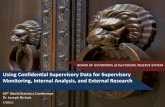
Supervisory System Functions Destination Selection Route Selection Load & Dump Points Traffic Control & Rules Course Database Autonomous Interaction Manned Vehicle Interaction Fail-safe Operation System-wide Security Central user interface
RouteSystem
GUI
TrafficControl
DISPATCH(Select destination)
(Control all Systems)
Locations(Load / Dump)
Course DataSystem
Course DataSystem
InteractionSystem
(Auto / Manual)
InteractionSystem
(Auto / Manual)
StatusSystem
StatusSystem
Speed Control GPS
Fail-S
afe System
s
Radio Network
CAN Bus

Destination Selection
Using DISPATCH® Mine Management System Optimizes overall productivity
Best Path(BP)
LinearProgramming
(LP)
DynamicProgramming
(DP)
EstimatedTravel Times
Path FlowRates
Min
eT
opog
raph
y
Con
stra
ints
Tru
ckS
tatu
s
TruckAssignments
Updated Travel Times
DISPATCH Optimization Algorithms

Destination Selection - Example (BP) Estimate travel time
between each pair of locations. (BP Algorithm) Use a combination of
distance, lift up/down, and history.
DiggingWaste
Crusher
Shovel 1
Shovel 2
Shovel 3
Waste Dump
DiggingOre
DiggingOre
3
5
9
11
14
14
13
20
18

Destination Selection - Example (LP) Estimate travel time
between each pair of locations. (BP Algorithm)
Compute flow rates for each path. (LP) Use shovel capacities,
material types, travel times, and crusher capacity.
DiggingWaste
Crusher
Shovel 1
Shovel 2
Shovel 3
Waste Dump
DiggingOre
DiggingOre
1000empty
1000empty
500empty/ore
1000waste
1000ore

Destination Selection - Example (DP) Estimate travel time
between each pair of locations. (BP Algorithm)
Compute flow rates for each path. (LP)
When a truck finishes at a load/dump site, pick a new destination. (DP) Consider truck location &
capabilities, and attempt to maintain flow rates.
DiggingWaste
Crusher
Shovel 1
Shovel 2
Shovel 3
Waste Dump
DiggingOre
DiggingOre
1000empty
1000empty
500empty/ore
1000waste
1000ore
Just finisheddumping
“T6 finished dumping”“Assign to Shovel 3”

Route Selection Given available courses, find
best route from here to there.
“Here” “There”

Route Selection - Location concept Location: A logical destination a truck can be assigned to. Can be a point in space, an area, a set of points, etc. Many different kinds (Crusher, Fuel, Parking, Load, Dump) Represented by Java Object
LocationsLocations

Route Selection - Location entry points
RouteSystem
TrafficControl
DISPATCH(Select destination)
LocationDatabase
StatusSystem
Assign “T6” to “Bench 3”1
2 34
5
6
7
Where is Truck “T6” now?
Find location “Bench 3”
Get entry pointsfor truck T6
Parked at (x,y,heading)
Bench 3 returned
Bench 3
Bench 2
Bench 1C
rush
er
Dump 3
Dump 1Dump 2
Par
king
are
a
Fuelbay
Entry points are (x,y,heading){cost=5} & (x,y,heading){cost=272}
9
8 Route system computes best path
Extend route for T6 byadding course
10T6 route changed

Route Selection - Location types - Crushers
Simple Crusher locations Single entry point Upon arrival, truck dumps load. When done, it is marked “empty” and given a new
assignment. More complex Crusher locations can implement:
Special parking rules Interfaces to Crusher monitoring systems Multiple crushers as single destination
(Crusher is chosen after truck arrives)

Route Selection - Location types - Benches
Manually spotted Benches Entry/exit points computed using bounding polygon
Entry pointsExit points

Route Selection - Location types - Benches
Manually spotted Benches Entry/exit points computed using bounding polygon Upon arrival, truck switches to manual control
Truck parks at entry point

Route Selection - Location types - Benches
Manually spotted Benches Entry/exit points computed using bounding polygon Upon arrival, truck switches to manual control When done:
Bench generates a simple course from truck’s current position to each “safe exit point”
Note: Generated paths must meet some bench-specific criteria to be considered safe.

Route Selection - Location types - Benches
Manually spotted Benches Entry/exit points computed using bounding polygon Upon arrival, truck switches to manual control When done:
Bench generates a simple course from truck’s current position to each “safe exit point”
Bench asks DISPATCH to assign loaded truck

Route Selection - Location types - Benches
Automatically Spotted Benches Entry/exit points computed using bounding polygon Just before arrival:
Bench decides which shovel to send the truck to Bench generates a course to that shovel Bench extends truck’s route
with generated course
Exit like Manual
Optionally, the Bench may park the truck somewhere to wait for a ready shovel.

Route Selection - Location types - Dumps
Dumps and Stockpiles Entry/exit points computed using bounding polygon Just before arrival:
Dump chooses dumping location(Using slot grid or other structure)
Dump generates course to that location* and out Dump extends truck’s route
When done: Mark empty & assign
* Courses may be pre-generated

Route Selection - Location types - Fuel / Park
Fuel bays Single point, like simple crusher When person indicates refueling is complete, Fuel bay
requests a new assignment for the truck Parking spots
Single point Truck stays until externally reassigned
Parking areas Auto-generate courses to multiple parking spots Just before truck arrives, choose parking spot
Fuel Bay
Parking Spot
Parking Area

Course Data - Course concept Course: A specific continuous smooth trajectory from one point
to another, along with associated data and attributes.
A course consists of A start position and an end position A continuous smooth curve connecting them Course Attributes on various pieces of curve Associated data
Not a course A single position (x,y,heading) A list of positions A curve discontinuous in (x,y) or heading at any point
Portrait of a Course

Course Data - Course concept
A piece of cheese
Break it into two pieces
You get two pieces of cheese
Put it back together
The pieces fit perfectly
A course
Break it into two pieces
You get two courses
Put it back together
The pieces fit perfectly

Course Data - Course concept
Where can a course be cut? In theory, a course could be cut anywhere In practice, it is limited by the use of integer indices, creating
atomic (indivisible) courses we call “steps” We try to keep the steps less than 10cm long
When can two courses be joined end to end? Any time the (x,y,heading) matches exactly In practice, this means joining either:
Two matching pieces of a previously cut course, or A recorded course with a course generated to match it
Atomic “steps” (indivisible)
1 meter
Yes
Yes
No -- these never match EXACTLY at any point

Course Data - Course concept
Trajectory Immutability A course object’s trajectory can never be changed. When you cut a course or join courses you get a new course
object.
Associated data A course may also store Speed & other Safety data Retrieved using custom interfaces (not always supported)
Course Attributes Objects attached to sections of course, used to store:
Human readable name Teaching history (who,when,...) Generation authority
Validation info (who, when, …) Enabling conditions Anything else

Course Data - Course Attribute concept Course Attribute: A Java object attached to a course.
Can apply to whole length of course or any part
Attribute “Color(Blue)” applies to this whole course Attribute “Style(Dotted)” applies to first ¾ of this course Attribute “Wide” applies to first and last ¼ of this course
Attributes apply to pieces of course, not points Concept “The attributes at this point” is meaningless Think of each step as having a set of attributes
Attributes are attached to underlying data If you cut a course and apply an attribute to one of the pieces, the
attribute will be applied to that part of the original course.“in common”

Course Data - Course Attribute concept
Example: Joe & Tom create courses by recording teaching data:
Recording code adds attributes to each course: TeachingHistory(“Joe”, 1:30pm, …) added to whole length of Course 1 TeachingHistory(“Tom”, 1:45pm, …) added to whole length of Course 2
Susan unconditionally enables both courses: UnconditionalEnable(“Susan”) added to whole length of Course 1 UnconditionalEnable(“Susan”) added to whole length of Course 2
Routing code generates a connecting segment:

Course Data - Course Attribute concept
Example, continued: Routing code signs & enables generated course:
GeneratedBy(SwitchPoint,Authority=81232435352) added to Course 3 SwitchSegmentEnable() added to Course 3
When truck “T5” is assigned to “Bench 3”: Route Selector computes best route:
And constructs it:
Route Selector updates the “LastUsed(…)” attribute on the new course:
LastUsed(4:32pm) added to [ join(course1.cut(…),course3,course2.cut(…)) ]
“Best route is: join(course1.cut(…), course3, course2.cut(…))”

Course Data - Course Attribute concept
Example, continued: myRoute.getAttributes(TeachingHistory):
TeachingHistory(“Joe”, 1:30pm, …) TeachingHistory(“Tom”, 1:45pm, …)
myRoute.getAttributes(*): TeachingHistory(“Joe”, 1:30pm, …) TeachingHistory(“Tom”, 1:45pm, …) UnconditionalEnable(“Susan”) GeneratedBy(SwitchPoint,Authority=81232435352) SwitchSegmentEnable() LastUsed(4:32pm)
myRoute.cut(...).getAttributes(*): TeachingHistory(“Joe”, 1:30pm, …) UnconditionalEnable(“Susan”) LastUsed(4:32pm)

Course Data - Course Attribute concept
Example, continued: course1.getAttributes(*):
TeachingHistory(“Joe”, 1:30pm, …) UnconditionalEnable(“Susan”) LastUsed(4:32pm)
course2.getAttributes(*): TeachingHistory(“Tom”, 1:45pm, …) UnconditionalEnable(“Susan”) LastUsed(4:32pm)
Use Course Cursor to scan course, retrieving trajectory and attributes.

Course Data - Mechanisms
How is a course stored? Different courses can be stored in different ways:
Some courses may be stored as a sequence of points Some courses may be stored as B-Spline curves Some courses may be stored as arc and line segments
All of these objects implement the Course interface
CourseInterface
Point SequenceCourse
B-SplineCourse
Arc & LineCourse

Course Data - Mechanisms
How is a course sent over the radio? Each class (Points, B-Spline, Arc/Line, etc.) uses it’s own
encoding and compression mechanism The Course Data Sender is responsible for making sure the
embedded devices have all necessary course data: To drive their assigned routes To interact with other trucks
Most messages refer to course by CourseName, a small opaque value identifying the course
Embedded devices can use the CourseName to look up the actual Course object
“Hi, I’d like you to drive course 07 F3 26 5C 82 4A 84 please”
CourseName

Route Selection - Switch Points
Need to splice recorded courses together Need to splice in generated courses Automatic splicing

Route Selection - Switch Point concept Switch Point: A place where two courses are sufficiently close
that a truck can transfer from one to the other.
We generate two connecting courses for most switch points:
Not all possible switch points are used

Route Selection - Best Path calculation
RouteSystem
CourseData
System
Update route
12
3
4
5
6
7
98
An assignment is made byDISPATCH (see other slide)
10
Create Switch Segment Model
Created
Switch Segment Model
Get courses & attributes
ReturnAdd courses
to model
Report new & deletedswitch segments
Best Path Network
StatusSystem
Compute best path to (x,y,h)
Best path is ___Once perentry point
Steps 1-3: At system startupSteps 4-6: As courses changeSteps 7-10: At assignment time

Route Selection - Best Path calculation
Use cost based on estimated travel time Rough estimate from “teaching” speed Historical database indexed on switch segment Future: Use congestion info from Traffic Control
Use entrance costs provided by locations
Join selected courses into a new route
The whole route is stored and transmitted as one big long course.

Route Selection - Updating the Route
If truck has no route, just add new route If truck already has a route:
Compute first branch point
Tell truck to cut route at branch point and append new course instead.
If truck is near branch point, compute alternate routes: Compute alternate route in case truck misses first branch point. Compute branch point for alternate route Repeat until branch point is “far enough” away.
AlternateBranch Point
Branch Point
Old Route
New Route Alternate
New Route

Collision Avoidance systems Autonomous interaction system
Used for interactions with things which move predictably (autonomous trucks, parked trucks)
Permission based Truck can only drive permitted courses
Manual interaction system Used for interactions with things which move unpredictably
(manned trucks, portable safety units)
Position message based Truck must check for potential collisions based on (x,y,h)
Obstacle detection system Used for interactions with all non-radio objects

Collision Avoidance - Safety Envelope concept Safety Envelope: A rectangle representing the actual size of
the truck enlarged somewhat to take into account navigation errors, steering errors, calculation errors, and so forth.
Safety Envelope
Nominal Truck Position

Autonomous interaction system Used for interactions with things which move predictably:
Autonomous trucks Parked & Locked pickup trucks
Permission based Autonomous truck can only drive permitted courses Parked pickup truck must stay in permitted location
Truck 3 may drive in this area: P832

Autonomous interaction - Permission concept Permission: An instruction allowing an autonomous truck to
drive or park in a specific area, as soon as the given conditions are met.
Permissions: Can only be created by central workstation Remain valid until the truck relinquishes them Two units’ active* permissions may never overlap
Redundant fail-safe systems double check all calculations
Permissions include: Permission ID Permitted area Zero or more Conditions
Non-overlapping permissions
* An active permission is one which has all of it’s conditions fulfilled

Autonomous interaction - ExampleCentral Truck T3 Truck T7
T3 may drive course ATell T7 when done
P832
A
T7 may drive course B after T3 relinquishes P832P544
B
T3 relinquishing P832T3 relinquishing P832
T7
T3
T3
T7
T3
T7
T7
T3

Autonomous interaction - Permissions
A truck may have several active permissions Permissions are additive
A truck must always have active permissions covering: It’s current position It’s entire “worst case stopping distance” along the
course, given it’s current speed
If necessary, slow down
Worst case stopping distance
Required permission area

Autonomous interaction - Permission area Options for describing permitted area:
Course with standard sliding safety envelope
Course with custom sliding safety envelope
Polygon or B-spline
Can combine using set Union, Intersection, Difference

Autonomous interaction - Permission area
Need to be careful to slide safety envelope properly
*Diagram is slightly exaggerated to make it easier to see the problem

In the future assign adjacent permissions on a course so they don’t overlap*:
For now we assign them like this:
This requires us to use mostly conditional permissions, resulting in extra radio traffic
Autonomous interaction - Overlaps
* Using {env(A), env(B)-env(A), ...}

Autonomous interaction - Partial relinquish
Can relinquish part of permitted area Used for smooth following Used for narrow roads
Relinquished area is subtracted from permission
Relinquished area can be any shape
Original permission area Retained permission areaRelinquished area

Autonomous interaction - Partial relinquishTruck T4 Truck T9
I relinquish portion “A{0,45}” of P832
I relinquish portion “A{0,86}” of P832
I relinquish portion “A{0,124}” of P832
I relinquish portion “A{0,171}” of P832
Only T4’s permission is shown
T9T4
T9T4
T9T4
T9
T4
T9
T4

Manual interaction system Used for interactions with things which move unpredictably:
Pickup trucks Shovels Loaders Manned haul trucks Autonomous haul trucks which aren’t “locked” into autonomous mode Men carrying portable safety units
Position message based Truck must check for potential collisions based on (x,y,h)
Except when parked & locked
At 7:52:19am, pickup 3 is at (284,982,27°), speed 17kph
I need to slow down

Manual interaction - Position Message Concept Position Message: A message giving a vehicle’s (x,y,heading)
and speed at a specific time.
Position messages contain: Source id Time stamp Position (x,y,heading) Speed
Sent between vehicles, also to the central computer
Sent more frequently when sender & receiver nearby
At 7:52:19am, pickup 3 is at (284,982,27°), speed 17kph

Manual interaction - Vicinity List Concept Vicinity List: A complete list of all unpredictably moving
vehicles near a given truck, meaning that the vehicle has the ability to enter the truck’s safety envelope within x seconds.
Vicinity List contains: Autonomous truck id Expiration time A list of nearby vehicles, each with:
Manual vehicle id Soonest possible contact time Capability & Promise information (not shown)
Generated by central computer & sent to each truck
Vicinity list for T2, expires 6:25:32pm:
Pickup 5 soonest contact @ 6:21:10pmLoader 2 soonest contact @ 6:21:48pmTruck M soonest contact @ 6:22:58pm

Manual interaction - Vicinity List Concept To be in motion, a truck must have:
A vicinity list (not expired) A position message from each vehicle on the list
All the vehicles on the list mustalso be far enough away.
Vicinity list for T2, expires 6:25:32pm:
Pickup 5 soonest contact @ 6:21:10pmLoader 2 soonest contact @ 6:21:48pmTruck M soonest contact @ 6:22:58pm
Pickup 5
Truck T2
Loader 2
Truck M Stopping distance

Manual interaction - Soonest contact Depends on:
Autonomous truck route Manual vehicle properties:
Acceleration abilities Maximum speed Turning radius (speed dependent)
Promises made by manual vehicle
Calculated by: Central - low resolution - for vicinity list Autonomous truck - high resolution
- for slow/stop decision
Pickup moving at 100km/h
1 second2 seconds
Pedestrian with PSU
Stopped pickup truck

Manual interaction - Soonest contact Use time-distance function
Time-distance function may be direction dependent
Pickup moving at 100km/h
1 second2 seconds3 seconds
Distance = vehicle.timeDist( Time, )
0
500
1000
1500
2000
2500
0 100 200 300 400 500
Time (seconds)
Dis
tanc
e (m
)
20km/h
30km/h
40km/h

Manual interaction - ExamplePickup M4 Truck T9
6:27:55 M4 at (253,647,27º), 14km/h
6:28:10 M4 at (260,645,28º), 16km/h
6:28:15 M4 at (266,643,32º), 13km/h
Loader 2
Pickup M4Truck T9
Stopping distance
Pickup M4Truck T9
Pickup M4 Truck T9

Manual interaction - Promise concept Promise: A contract made by a vehicle’s embedded controller to
guarantee (and enforce, if possible) specific behavior.
Promises: Made by the vehicle’s embedded controller May depend on manual input (ie. putting truck into park&lock mode) Specific expiration time Revocable only if all recipients agree Any broken promise immediately shuts down all trucks
Example promise types: Promise to stay within permissions Promise to keep speed below specific limit Promise to maintain other vehicle dynamics (eg. Turning radius speed) Promise not to cross specific boundaries Promise to stay within specific area Promise to stay out of specific area
I promise to limit my speed to 10km/h

Manual interaction - Promise types Promise to stay within permissions (Permission Lock)
Used for any/all vehicles in “autonomous” or “parking” mode Can’t be used if manual operator could override
Requirements: Truck must already have active permission Truck must stay within active permission
Enforcement options: Physical lockout on manual controls Physical lockout of access to cab Hardware control of brake & accelerator Button “agree not to touch the controls” Button “enter parking lock mode” Mine policy: Press “request unlock” after turning on truck
and before driving
I promise to follow all Autonomous Interaction rules and stay within my
permitted area at all times.
Including manual trucks

Manual interaction - Promise types Promise to keep speed below x
Used with manual vehicles and Portable Safety Units Enforcement options:
Hardware control of brake & accelerator Button “agree to limit speed to 20km/h” Mine policy: 100km/h mine-wide speed limit Mine policy: Press “request speed limit increase” before
exceeding 20km/h
Promise to maintain other vehicle dynamics Acceleration, turning radius, etc.
Promise not to turn left / right Short-term promise, used with turn signals
Speed Limit
50
No Left Turn

Manual interaction - Promise types Promise to not cross specific boundaries
Used with manual vehicles or Humans carrying PSUs Possible boundaries:
Pit walls, cliffs, lakes, buildings Physical divider in middle of the road Mine policy: Press “request entry to haul road” before entering haul road Mine policy: Wait for “green light” before entering marked intersection
Promise to stay out of specific area Used with manual vehicles or humans carrying PSUs Enforcement options:
Button “agree to stay off displayed course for T3” Mine policy: When truck on “right of way” & within 100m, stay out of path.
Do Not
Enter

Autonomous vs Manual interaction
Autonomous interaction Permission based Extremely efficient Low radio bandwidth Nearly optimal productivity Extremely reliable
-- BUT -- Only work if truck is
Permission Locked
Manual interaction Position message based Not very efficient High radio bandwidth Poor productivity Very reliable
-- BUT -- Works even if truck is not
Permission Locked
Use Autonomous Interaction as much as possible Use Manual Interaction only when necessary

Permission Lock: When a vehicle has promised to stay within it’s permissions at all times, thus allowing the use of the more efficient Autonomous interaction.
Autonomous trucks are not always permission locked: Can’t lock if an operator could wrest control at any time Use both systems during manual autonomous transition
Manual trucks may be permission locked when parked: Manual truck requests a rectangular permission Manual truck promises to stay within it
Before truck is driven, promise must be rescinded.
Autonomous vs Manual - Permission Lock
Permission assigned to manual truck

Obstacle detection system
Used for interactions with all non-radio objects
Implemented by Safety controller Not part of supervisory system Supplements supervisory collision avoidance
Manual interaction
Obstacle Detection
Autonomous Interaction

Traffic Control
Given: Locations of all vehicles Routes for each autonomous truck Loaded / Empty status Mine priorities Traffic rules
Optimize sequencing of trucks through intersections
Prevent deadlocks
Implement traffic rules
LocalPlanner
InteractionPlanner
TrafficNetwork
IntersectionModel
GlobalPlanner
TrafficRules
Algorithms
RoadsIntersectionsEnd points
Manual truck
Which truck should go first?

Traffic Control - Intersection Concept Intersection: Anywhere two or more active courses come close
enough together that the truck safety envelopes could overlap.
Basic Concepts: Intersections are based on courses, not roads
Courses need not actually cross to be an intersection
Only active courses are considered A course is active if it has recently been driven or
is currently in a truck’s route Saves bandwidth by ignoring unused turnoffs
Inactive

Traffic Control - Intersection Concept Intersections are dynamically recomputed at run time
Dynamically generated courses areanalyzed too

Traffic Control - Intersection Concept Special kinds of intersections:
Narrow roads Are intersections by definition Have overlapping permissions Can use special “pull off to side” algorithm:
• Generate two standard permissions for the course
• Generate one permission with “offset” safety envelope
• Link ‘em up right (left as an exercise for the reader)
• Now truck can pull off into “offset” permission to let other truck by
Bidirectional lanes Single lane roads with traffic going both ways Are exclusive intersections, but special optimization algorithms
apply

Traffic Control - Traffic Network
Simplify active courses into logical graph model Removes geometric considerations Makes global and local optimization algorithms easier “Intersection & Link” style
Intersection
Intersection
Intersection Intersection
Intersection
Links
Links
Links
Link
Link Link

Traffic Control - Planners
Global planner Considers whole network at once
Local planner Makes final sequencing decision
for each intersection Makes sure all traffic rules are applied
Interaction planner Translates sequences into autonomous permissions
and instructions to manual drivers (“stop”, “go”)
LocalPlanner
InteractionPlanner
TrafficNetwork
IntersectionModel
GlobalPlanner
TrafficRules
Algorithms
RoadsIntersectionsEnd points
Manual truck

Traffic Control - Traffic Rules Java objects, which can specify just about anything:
Speed limits Stop signs Loaded / empty priorities Special permission schemes Passing behavior etc.
Can be applied to any region of the mine: Polygonal area Named location Whole mine etc.
Can be conditional on arbitrary conditions (ie. Rain, Tuesday)
Raining
Slow to 10km/h within 100m of other truck
on entry

Control Constraints
Interface between interaction and speed control Controls truck’s progress along route Two basic kinds of constraint:
Stop point: Point at which truck must come to a rest
Speed limit Point after which we must slow down to a specified speed
The stop point or speed limit goes away when the constraint is removed
Speed Limit
Stop P
oint
Speed
x

Speed Control Intelligent optimization of speed:
Prevent “stutter” due to lost messages Reduce unnecessary acceleration Implement global cost policies
0
10
20
30
40
50
60
1000 1050 1100 1150 1200 1250 1300
Trajectory index
Vel
oci
ty (
km/h
)
Maximum speedSpecified speedSpecified-deceleration limitedCrystal ball specifiedOptimized targetTeaching speed

Fail-safe systems Autonomous interaction verifier Manual interaction verifier Emergency system Broken promise alert
Planner or Interaction code
1. Analyze options2. Select best possible action3. Generate proof that action is safe4. Pass proof & action to Verifier
8. Send signed action
Verifier
5. Check each proof step6. Generate signature7. Attach it to action
Proof-based Verification with Signatures

Fail-safe systems
Autonomous interaction verifier Proof-checks and signs permissions, simple algorithm:
A routine to check two permissions for non-overlap A routine to check if one permission is conditional on another A routine to check if two permissions are for the same truck Main routine calls above three routines on each pair of permissions
Checks signatures on incoming permissions Checks stopping distance Checks if that area is covered by active permissions
Whenever setting the Control Constraints Just before signing a relinquish message
Checks signatures on incoming relinquish messages

Fail-safe systems
Manual interaction verifier Proof-checks “soonest contact” time calculation Proof-checks and signs vicinity lists Checks and signs outgoing position reports Checks signatures on:
Incoming vicinity lists Incoming position reports

Fail-safe systems
Emergency collision detect Third level of redundancy Watches for imminent collision Only output is the “Emergency! Danger! Slam on the
brakes now! You’re about to crash!” signal Uses separate position report system Uses unrouted Spread Spectrum Radio for messages
Broken promise alert If a promise is ever broken:
The embedded controller broadcasts “Broken promise” alert All autonomous trucks stop immediately After broken promise is rescinded, originator shuts of alert

Handling of Dynamic changes
Recording teaching data Can be done at any time Possible to allow data to be enabled for use directly
from the field Converted to B-Spline or other format on truck before
sending over radio Making a course available or unavailable for routing
Can be done through central GUI Can be done directly from CGC (if we allow it) Can be set up to automatically happen based on
external conditions (eg. weather sensor, time of day)

Handling of Dynamic changes
How courses become active or inactive Activating courses:
Automatically when added to any truck’s route Can pre-activate courses we know we’ll need
Deactivating courses: Automatically after a certain number of days of disuse Can manually deactivate if not in any truck’s route Location may automatically deactivate generated courses
(useful for loading/dumping where courses always changing)
When active, course is part of intersection model

Coordinate systems
WGS-84 standard coordinates Used by GPS receiver Used by entire Java supervisory system Only coordinate system to go across the radio
Komatsu grid coordinates Used only by Nav/Drive & Safety controllers Local to a truck (may vary from truck to truck)
DISPATCH mine coordinates Used only by DISPATCH destination selection code Local to DISPATCH code in central computer
(In compressed form)

Coordinate system shifts
All coordinates in mine can shift: If base station is moved If GPS accuracy is improved or a GPS bug is fixed
This isn’t a problem, if we know about it All training courses are date stamped Attribute mechanism can automatically cause:
All courses recorded during specific date/time range are invalid But automatically generate a course with coordinates corrected

Graphical User Interface
Can edit: Course Data Course Attributes Traffic Rules Optimization parameters
Extensible