
Auto-Driven Vehicle By Jason Gajowski Nathan Schmarje 9/11/2003.
51
Auto-Driven Vehicle By Jason Gajowski Nathan Schmarje 9/11/2003
-
date post
21-Dec-2015 -
Category
Documents
-
view
214 -
download
0
Transcript of Auto-Driven Vehicle By Jason Gajowski Nathan Schmarje 9/11/2003.
Auto-Driven Vehicle
By
Jason Gajowski
Nathan Schmarje
9/11/2003

Contents
• Project Description• User Interface• Component Description• Progress Thus Far• Remaining Work/Test Plan• Power Usage• System Costs• Safety Issues• Conclusion• Questions

Project Description

• Abstract– The objective of this project is to design and
create an Auto-Driven Vehicle that will be able to navigate itself through an abstract highway system. The vehicle will be able to travel to predefined destinations, which will be preloaded into tables as sample routes (recipes). There will be a minimum of two destinations that the user will be able to select.

• Abstract Operational Objectives– Travel Down a programmed route in a single-
lane/two-way highway • Stay On Path
• Make Turns Based on Location and Route– Make Left Turns, Right Turns, and Go Straight
– Fork Left and Fork Right
• Make Stops – Stop at Traffic Light
– Stop for Stop Sign
– Arrive At Destination – Object Detection
User Interface

Command Binary or String
Equivalent
Description
ST 010 Instructs the vehicle to follow the path
LT 110 Makes the vehicle take a left turn at an intersection
RT 011 Makes the vehicle take a right turn at an intersection
LF 000 Makes the vehicle fork to the left
RF 101 Makes the vehicle fork to the right
LD 100 Makes the vehicle do its final left turn, ending the recipe
RD 001 Makes the vehicle do its final right turn, ending the recipe
Note 1: Commands are based on road indicator sensor pattern, except for forks, which are not by, design (see Figure 2)Note 2: Leading zeros are left off the binary values
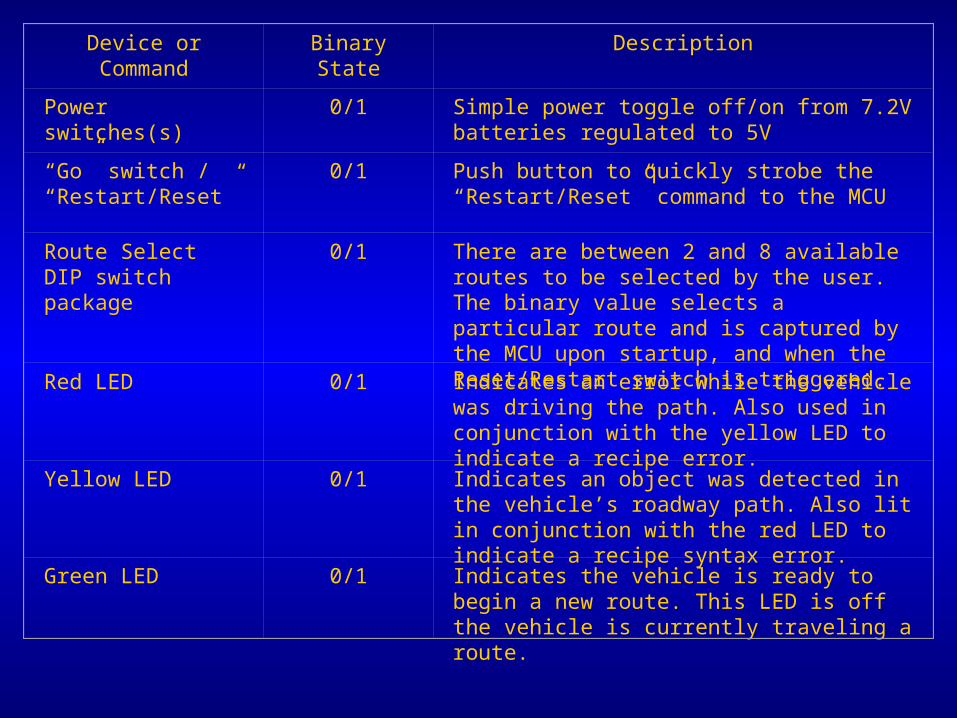
Device or Command Binary State Description
Power switches(s) 0/1 Simple power toggle off/on from 7.2V batteries regulated to 5V
“Go” switch / “Restart/Reset”
0/1 Push button to quickly strobe the “Restart/Reset” command to the MCU
Route Select DIP switch package
0/1 There are between 2 and 8 available routes to be selected by the user. The binary value selects a particular route and is captured by the MCU upon startup, and when the Reset/Restart switch is triggered.
Red LED 0/1 Indicates an error while the vehicle was driving the path. Also used in conjunction with the yellow LED to indicate a recipe error.
Yellow LED 0/1 Indicates an object was detected in the vehicle’s roadway path. Also lit in conjunction with the red LED to indicate a recipe syntax error.
Green LED 0/1 Indicates the vehicle is ready to begin a new route. This LED is off the vehicle is currently traveling a route.



Component Description

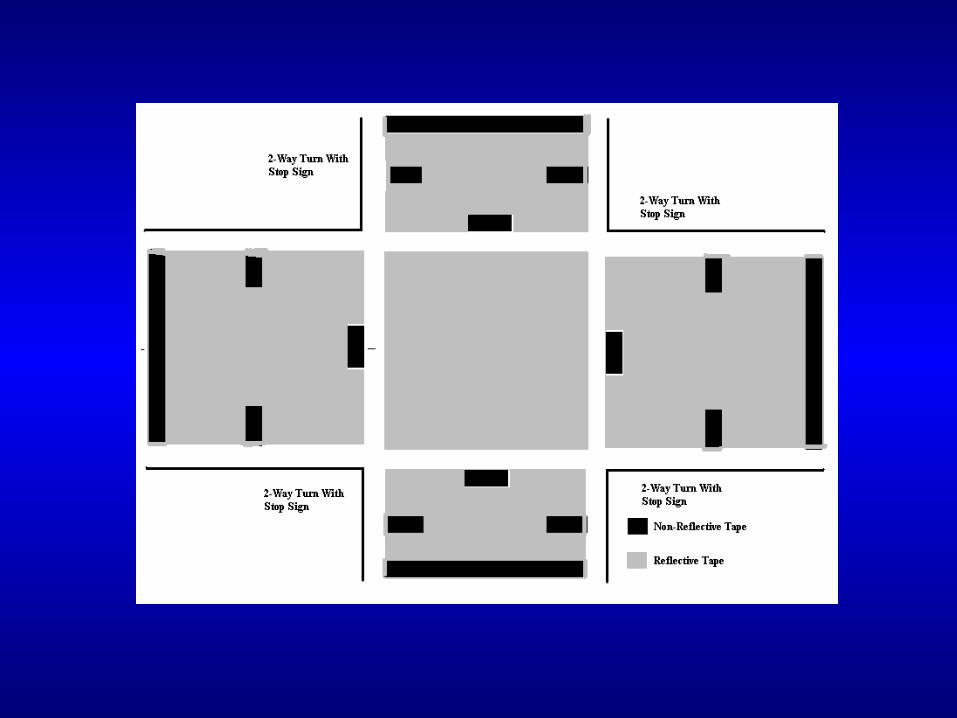
• Highway System– The roadway consists of reflective tape that will
be laid wide enough to cover the chassis of the car but not the end of the 2 road detection sensors on the sides of the vehicle.
– Road indicators consist of rectangular blocks of gaff tape that do not reflect the IR light


• Vehicle Description– Dimensions – 17.5 x 12.25 inches – Motor – 20 Turn DC Motor – Mechanical Speed Control
• Controlled by Servo Motor
– Servo-Motor Drive System• One Servo for Speed Control
• One Servo for Steering


• Micro-Controller Description– Rabbitcore RCM2100– Flash Memory – 512k – Static RAM – 512k – General Purpose I/0 34 – Power Supply – 4.75 ~ 5.25 VDC (140 mA) – Size – 2.0 x 3.5 x .8 inches (51 x 89 x 20 mm) – Clock Speed – 22.1 MHz – Programming Language – Dynamic C





• PWM Characteristics– 2 modules – 2 servo motors – 5V at 500mA – 555 Timer ~ 25.6kHz (39us) – Dual 4-bit binary counter (8-bits) ~ 100Hz
(10ms) – 2, dual 4-bit binary comparators – 1 .47uF Capacitor – 1 1k potentiometer – 2 sets of 8-bit binary inputs from micro-
controller


• Opto-Reflectors– Road Indicator + Path Detection Sensors




• Object Detection Sensor– Sharp GP2D12 infrared ranger

Parameter Symbol Rating Unit Remark
Operating Supply Voltage VCC 4.5 to 5.5 V
Parameter Symbol Conditions Min
. Typ
. Max
. Unit
Measuring distance range
Delta L *1 10 - 80 cm
Output Terminal Voltage
VO L = 80 cm *1 0.25 0.4 0.55 V
Output voltage difference
delta VO
Output change at L change (80 cm -> 10 cm)*1
1.75 2.0 2.25 V
Average supply current Icc L = 80 cm, *1, *2 - 33 50 mA

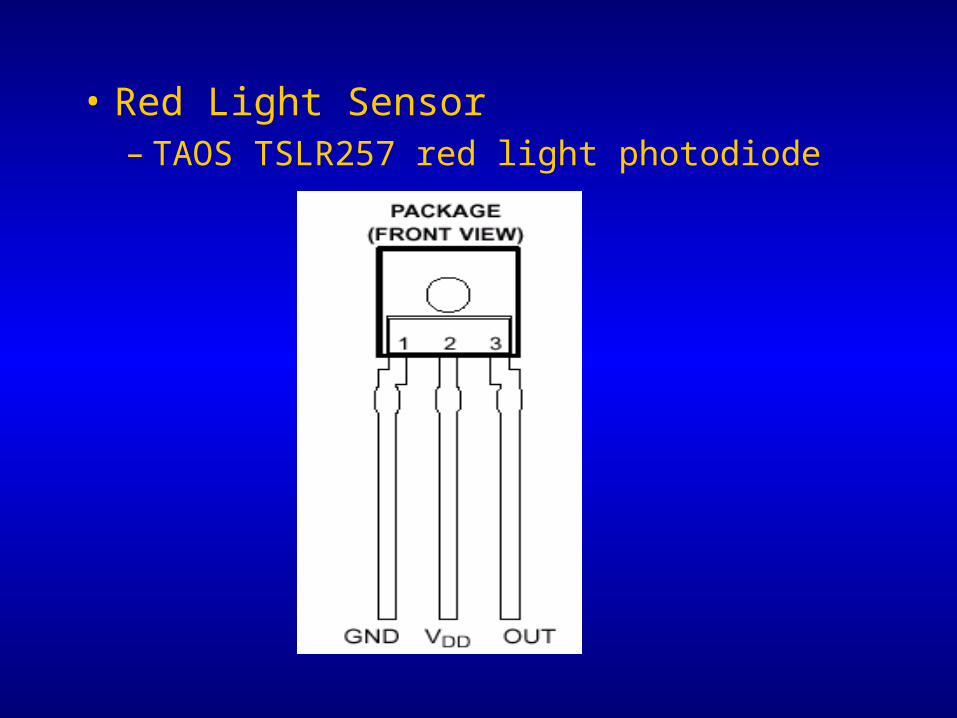
• Red Light Sensor– TAOS TSLR257 red light photodiode





Progress Thus Far

• Vehicle Obtained and Constructed
• Micro-controller Obtained and Familiarized
• Prototype Board Constructed and Tested
• Interface Designed and implemented
• Drive Control System Designed and Implemented (PWM Modules)
• Completed Sensor Scoping
• Completed Sensor Module
• Preliminary Map Constructed

Remaining Work/Test Plan

• Code Design/Implementation (Block Sections)– Structural Layout of Code
• State Machine Implementation
– Path Detection• Get Vehicle to Drive Straight Stable
– Road Indicator Detection• Get vehicle to make all necessary turns
– Destination Detection• Get vehicle to successfully reach destination
– Object Detection– Red Light Detection

• Sensors– Final Physical Adjustment of sensors– Verify if road sensors work successfully with
micro-controller– Verify Object Detection Sensors works
successfully with micro-controller– Implement Red Light Fixture on vehicle– Test Red Light Sensors on vehicle with micro-
controller

• Map– Make adjustments to preliminary map– Complete circuitry for Red Light Signals

Power Usage

• DC Motor– 20W Nominal
• Micro-Controller– Power Supply – 4.75 ~ 5.25 VDC (140 mA)– .7 W
• Servo Motors– 2 servo motors – 5V at 500mA – 2.5 W
• Road Indicator Sensors– 25mW
• Object Detector– 165mW nominal– 250mW max
• Red Light Sensor Array– 30mW

System Costs

• Vehicle - $198
• Signal System - $13.60
• Driving Area – $84
• Miscellaneous – $52
• Total - $347.60

Safety Issues

• Batteries cannot be overcharged– 3hr charge time– Must be fully discharged
• Small children and babies should NOT handle or play around vehicle

Conclusion

?Questions?

















