Aspects of Overcurrent Protection for Feeders and …...Figure I shows the block diagram for a dual...
8
Aspects of Overcurrent Protection for Feeders and Motors E. O. Schweitzer, III, and S. E. Zocholl Schweitzer Engineering Laboratories, Inc. Presented at the 1995 Pennsylvania Electric Association Relay Committee Spring Meeting Matamoras, Pennsylvania May 25–26, 1995 Originally presented at the 1994 IEEE Industrial and Commercial Power Systems Technical Conference, May 1994
Transcript of Aspects of Overcurrent Protection for Feeders and …...Figure I shows the block diagram for a dual...

Aspects of Overcurrent Protection for Feeders and Motors
E. O. Schweitzer, III, and S. E. Zocholl Schweitzer Engineering Laboratories, Inc.
Presented at the 1995 Pennsylvania Electric Association Relay Committee Spring Meeting
Matamoras, Pennsylvania May 25–26, 1995
Originally presented at the 1994 IEEE Industrial and Commercial Power Systems Technical Conference, May 1994

Aspects of Overcurrent Protection for Feeders and Motors
E. 0. Schweitzer III, Fellow IEEE S. E. Zocholl, Fellow IEEESchweitzer Engineering Laboratories, Inc
ABSTRACT Because of the past necessity for using either discrete orspecialized system relays. overcurrent characteristics forthese applications may appear diverse and unrelated.However, microprocessor relay technology has advanced towhere it is not only feasible, but it is of distinct economicadvan~ge to consider all these characteristics collectively asattributes of a universal overcurrent relay. Furthermore.the issues of backup and redundancy are addressed since asingle processor easily accommodates the compu~tionalburden of two complete and independent relays.
This paper discusses the coordination of the characteristicsand the backup and redundancy possible with microproc-essor relays. The paper reviews the application of negative-sequence overcurrent characteristics for unbalanced protec-tion in motors and also covers the rules for coordinatingnegative-sequence characteristics to provide sensitive phase-to-phase protection in feeders. The paper also covers resetcharacteristics and the requirements for stator and rotorthermal protection of induction motors.
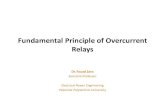
Figure I shows the block diagram for a dual universalovercurrent relay having one opto-isolated input, two outputcontacts, and a set of three-phase current inputs for each ofthe independent relays X and Y. In the relay settingprocedure, the user is prompted for relay X or Y and thenfor the application. The relay then presents a group ofelements to be set. Such an arrangement focuses attention,not only on the individual characteristics, but also on theelements that make up each application. This universalrelay concept is used here to discuss the commonality, thedifferences, and the coordination of the elements requiredfor feeder, motor, and breaker failure protection. Thepaper goes on to discuss the rules for the coordination ofnegative-sequence overcurrent characteristics for sensitivephase-to-phase fault protection in feeders, as well as forunbalanced current protection of induction motors.
Key Words: lnverse-time Overcurrrent Relay, Negative-Sequence Overcurrent Relay, Motor Thermal Model, MotorProtection.
INTRODUCTION
A comprehensive list of non-directional overcurrrent relayswould include thermal overload, inverse-time, definite time,and instantaneous relays. The list could be further classi-fied by operating quantities including individual phase,residual. and negative-sequence current. Taken collectivelyand depending on the characteristic shape, pickup and timerange, and dynamics, these relays span the applications formotor, feeder, and breaker failure protection.
333
IAX
lex
ICX
333
IAY
IBY
ICY
OKO. ,--/0,
FIgUJe 1: Relay Block Diagram

COORDINATION OF INVERSE TIME-CURRENT
CHARACTERISTICSMEASURANDS AND THE DIGITAL FIL TERINGPROCESS
The input for a digital relay is obtained by sampling sinewave currents at discrete time intervals. A fixed number ofinstantaneous samples per cycle are converted to digitalquantities by the AID converter and stored in memory forprocessing. Digital Filtering is the simple process ofcombining successive samples to obtain the quantities whichrepresent the phasor components of the input. Forexample, in Figure 1 six currents are sampled 16 times percycle. Each successive sample is multiplied by the coeffi-cients of a stored cosine wave and combined to obtain aphasor component. The cosine filter has the followingproperties ideal for protective relaying [ 1] :
Coordination practice is ultimately detern1ined by the typeof grounding used in distribution systems. Notably. in
Europe the practice is to operate high impedance groundedor ungrounded 3-wire distribution systems. Since there areno single-phase laterals protected by fuses. coordination isobtained using definite-time characteristics. Conversely. inNorth America the practice is to operate grounded 4-wiredistribution systems with loads served by single-phaselaterals protected by fuses. Consequently. coordination isobtained using inverse time-current characteristics suitablefor fuse coordination. Figure 2 shows the close coordina-tion of an extremely inverse induction characteristic withthat of a high-voltage fuse.
I. Bandpass response about the system frequency.2. DC and ramp rejection to guarantee decaying expo-
nentials are filtered out.3. Harmonic attenuation or rejection to limit effects of
nonlinearities.4. Reasonable bandwidth for fast response.5. Good transient behavior.6. Simple to design, build, and manufacture.
The present samples and the samples occurring a quarter-cycle earlier forD1 the real and imaginary components of thecurrent phasors. The measurands calcu1ated from thephasor components each cycle are:
11, Ib, Ic
10
12
Ii
Phase Current
Residual Current
N egative-Sequence Current
Positive-Sequence Current
APPLICATION GROUPS AND ELEMENTSFigure 2: Extremely Inverse Characteristic Compared withMin. Melting and Maximum Clearing Time of a SOE Fuse
All the elements of the universal relay are organized underthe applications of feeder, motor, or breaker. The feederapplication group provides three separate sets of Instan-taneous, Definite- Time, and Inverse- Time elements. Thefirst set responds to I., Ib, and 1.. and provides conventionalphase fault protection. The second set responds to 312 andprovides for sensitive phase-to-phase fault, and groundbackup protection. The third set responds to residualcurrent 310, and provides conventional ground fault protec-tion.
The straight line ft log-log plot of a fuse minimum meltingtime is often visualized as the basic time-current character-istic. However, a definite time must be added to form themaximum clearing time characteristic of the fuse. Thisillustrates the fundamental concept that whenever fixedclearing time is added to a straight line log-log plot theresult is a curve. For this reason, the most viable shape fora time-current characteristic for coordination purposes is thecurve formed when a definite time is added to the straighttine of a 108-108 plot.
The motor application group shares the phase, negative-sequence, and ground instantaneous and definite-timeelements to protect the motor for winding faults or faults inthe connecting leads. However, an added element, respon-sive to both positive-sequence and negative-sequencecurrent, provides thermal protection for overload, lockedrotor, or unbalanced current conditions.
Appendix I shows that, were it not for the use of saturation,the induction characteristic would be the straight line log-log characteristic of a fuse. However, the viable curve isformed by deliberately saturating the electromagnet at aspecific multiple of pickup current to introduce a definite-time component as discussed in [2]. Therefore, adding a
2

constant definite time teIDl to Eq. 12 of Appendix I formsthe induction characteristic equation. Consequently. all thecharacteristics can be accommodated in the dual overcurrentrelay using the following equations:
Table 1: Faults on a Radial line
13lz~1Fault
AGBCBCG
1
.';3
s.';3
For O < M < 1
AM2-:t
(I)t=TD
For M > 1
(2)t=TDA +B
MP- 1
where: t
M
TD
is the trip time in secondsis multiples of pickup currentis the time-dial setting ( I through 15)
where the constants A, B, and the exponent p determine theshape of the characteristic. The constants A and B can bechosen to accurately emulate the extremely and the veryinverse induction time-current characteristics with theexponent p of 2. An accurate emulation of the moderatelyinverse characteristic is obtained by using an exponent of0.02 with specific values for A and B. The shapes of theinduction characteristics are defined by the ratios of A to Band the exponents listed below:
The negative-sequence elements differ only in their operat-ing quantity and are easily coordinated with phase andground relays. Elneweihi et al. [3] , have devised a simplemethod for setting negative-sequence elements. The methodis based on the observation that the greatest ratio betweenthe negative-sequence current 312 and the phase current lpis V3 as illustrated in Tables I and II. The simple methodof setting negative-sequence overcurrent elements is asfollows:
Curve A/B p1. Start with the most downstream negative-sequence
element (e.g., feeder relay).Moderately InverseInverseVery InverseExtremely Inverse
0.02
2.0
2.0
2.0
2. Identify the phase-overcurrent device (relay, fuse,etc.) downstream from the negative-sequenceelement that is of the greatest concern for coordina-tion. This is usually the phase-overcurrent devicewith the longest clearing time.COORDINATING NEGA TlvE-sEauENcE
OVERCURRENT ELEMENTS3. Consider the negative-sequence element as an
"equivalent" phase-overcurrent element. Derive the
setting for this element as any phase element would
be done. The setting only differs in that it is only
governed by coordination time and not by load.
It is well understood that ground overcurrent elements,operated by the residual current 310, do not respond tobalanced load and can be set to operate faster and moresensitively for the most frequent fault type, the phase-to-ground fault. Similarly, negative-sequence overcurrentelements, responding to 312, do not respond to balancedload and can be set to operate faster and more sensitivelyfor the second most frequent fault type, the phase-to-phasefault.
4. Retain the time-dial or time-delay settings butmultiply the "equivalent" phase-overcurrent pickupsetting by ..;3. The result is the negative-sequenceovercurrent element pickup in terms of 3~ current.
Negative-sequence elements are useful in clearing faults onthe secondary of a delta-wye. Also, the settings realizedfor a bus negative-sequence element may be as sensitive asthe feeder phase-overcurrent elements for effective backupfor feeder phase-to-phase faults. The feeder relay sensitiv-ity for phase-to-phase faults may also be improved.
5. Set the next upstream negative-sequence element to
coordinate with the first downstream negative-
sequence element (and the third with the second and
so on).
3
0.4633.0540.29
161

which decreases to a low nmning value at rated slip labeled
Ro.MOTOR PROTECTION
The characteristics of the motor application are shown inFigure 3 with the starting current of an induction motor. Inthe motor application, definite-time and instantaneouselements provide protection for faults in the motor leadsand internal faults in the motor itself. A definite-timesetting of about 6 cycles allows the pickup to be set to 1.2to 1.5 times locked rotor current to avoid tripping on theinitial Xd" inrush current (shown magnified). The instan-taneous can then be set at twice the locked rotor current forfast clearing of high fault currents.
Using a typical starting current of six times the ratedcurrent and a locked rotor resistance Rl of three times valueof ~, the rr heating is estimated at 62 x 3 or 108 timesnormal. Consequently, an extreme temperature must betolerated for a limited time to start the motor. Where anemergency rt threshold is specified by the locked rotorlimit during a start, a threshold for the normal runningcondition is specified by the service factor. Therefore, thethermal model requires a trip threshold when starting,indicated by the locked rotor thermal limit, and a tripthreshold when running, indicated by the service factor.
: i---J
: ~t (P~)
""r"""""f """."""""."""""".".""""""""
lDLRT
R\U!I1irIg CIn
LRT
~~.~..~~..
R,
O.lLRT
RO:;::1::: D.6Dit&- Time
f ---1"""" ~tantaneons1
O.OILRr Inrush CIlITent iO 2.5 5 ?5
CU%rent m per Imit ofFLA
FIgure 3: Motor Characteristics Plotted with Motor Starting
Current
r:..: : ::J::.::::..:::..:: ;! Rotor Reslst8Dce T :
(p )j:j'!..
! :Speed mu
02 t4 Oj OJ II I I I I I
OJ Oj t4 02SlIp (l-m)
FIgure 4: Current, Torque. and Rotor Resistance of an Induc-tion Motor Versus Speed
An inverse-time phase overcurrent element and a separatenegative-sequence overcurrent element could be applied toprevent the overheating caused by a locked rotor or anunbalance current condition. However, neither of theseelements can account for thermal history or track theexcursions of temperature. Instead, an element is usedwhich accounts for the rr heating effect of both POsitive-and negative-sequence current. The element is a thermalmodel, defined by motor nameplate and thermal limit data,that estimates motor temperature. The temperature is thencompared to thermal limit trip and alarm thresholds toprevent overheating for the abnormal conditions of over-load, locked rotor, too frequent or prolonged starts, andunbalanced current.
The slip dependent beating effect of positive- and negative-sequence currents is derived as follows. The positive-sequence rotor resistance plotted in Figure 4 is calculatedusing current, torque, and slip in the following equation:
(3)
DEFINING THE THERMAL MODEL
and can be represented as a linear function of slip. Thepositive-sequence resistance R.+ is a function of the slip S:
Rr+ = (R1 -~)S + ~ (4)
The negative-sequence resistance R.. is obtained when S isreplaced with the negative-sequence slip (2-S):
Rr- = (Rl -RJ(2 -S) + ~ (5)
Factors expressing the relative heating effect of positive-and negative-sequence current are obtained by dividing Eqs.4 and 5 by the running resistance, Ro. Consequently, forthe locked rotor case, and where Rl is typically three times~, the heating effect for both positive- and negative-sequence current is three times that caused by the nom1alrunning current.
The rr heat source and two trip thresholds can be discernedfrom a motor characteristic of torque, current, and rotorresistance versus slip shown in Figure 4. The plot showsthe characteristic of the induction motor to draw excessivelyhigh current until the peak torque develops near full speed.Also, the skin effect of the slip frequency causes the rotorresistance to exhibit a high locked rotor value labeled Rl
4

the operating temperature with full load current. Thelocked rotor time, To' is oot usually specified, but may becalcu1ated by using a hot spot temperature of six times theoperating temperature in the following relation:
R R R~IS.l= ~IS.l= ~ = 3 (6)
For the nmning case, the positive-sequence heating factor
returns to one and the negative-sequence heating factor
increases to 5:12T TL .= 6 :. ~ = 1.2 (8)
IL2(T. -To) To
There are two reasons for using the rotor model in therunning state. The first is that, despite a difference inthresholds, it is an industry practice to publish the overloadand locked rotor thermal limits as one continuous curve asillustrated in Figure 3. The second is that the rotor modelaccounts for the heating of both the positive-sequence andthe negative-sequence current. As a final refinement,assigning standard values of 3 and 1.2 to the ratios ~/Roand T .rr o respectively, allows the model parameters to bedetermined from five fundamental settings:
~ls0()= I ~ls0()= 2 ~] -I = 5 (7)
These factors are the coefficients of the positive andnegative currents of the heat source in the theImal model.
STATES OF THE THERMAL MODEL
Because of its torque characteristic, the motor must operatein either a high-current starting state or be driven to a low-current running state by the peak torque occurring at about2.5 per unit current. The theIn1al model protects the motorin either state by using the trip threshold and heating factorsindicated by the current magnitude. The two states of thetheIn1al model are shown in Figure 5. The theIn1al modelis actually a difference equation executed by the micro-processor. However, it can be represented by the electricalanalog circuit shown in Figure 5. In this analogy, the heatsource is represented by a current generator, the tempera-ture is represented by voltage, and theIn1al resistance andcapacitance are represented by electrical resistance andcapacitance. The parameters of the theIn1al model aredefined as follows:
FLA Rated fu1l-load motor current in secondary ampsLRA Rated locked rotor current in secondary ampsLRT Them1al-limit time at rated locked rotor currentTO Time dial to trip temperature in per unit of LRTSF Motor rated service factor
(a) Startin& State I >2.5 pu
R1 = Locked rotor electrical resistance (per unit ohms)
Ro = Running rotor electrical resistance also rated slip
(per unit ohms)IL = Locked rotor current in per unit of full load current
T. = Locked rotor time with motor initia1ly at ambient
T o = Locked rotor time with motor initia1ly at operating
temperature
The starting state is shown in Figure 5a and is declaredwhenever the current exceeds 2.5 per unit of the rated fullload current and uses the threshold and heating factorsderived for the locked rotor case. Thermal resistance is notshown because the start calculation assumes adiabaticheating. The running state, shown in Figure 5b, is declaredwhen the current falls below 2.5 per unit current and usesthe heating factors derived for the nmning condition. Inthis state the trip threshold "cools" exponentially from alocked rotor threshold to the appropriate threshold for therunning condition using the motor thermal time constant.This emulates the motor temperature which cools to thesteady-state running condition.
(b) RunniD& State I < 2.5 pu
~ s: SlAtes of the Thermal Model
DUAL APPliCATIONS
Out of the many possible applications, two shown in Figure6a and 6b illustrate the versatility of the dual universalovercurrent relay. In Figure 6a, both the relays X and yare set for feeder application to protect a delta-wye trans-folmer bank. Relay X provides phase and negative-sequence overcurrent protection on the high side (delta) thatalso see through the bank to the low side. The ground
In the model, the thennal limit IL ~ .represents the locked
rotor hot spot limit temperature and IL 2(T .-T J represents
5

of ba~~ load to provide sensitive phase-to-phasefault coverage.
overcurrent elements provide sensitive protection for thehigh side but cannot see through the delta. However, relayy provides the ground protection for the low side. InFigure 6b, relay X is set as a feeder where the phase andnegative-sequence overcurrent elements provide protectionfor high phase-to-phase faults using a higher ratio ct. Relayy is set for motor application using a low ratio ct to protectthe small motor .
APPENDIX I
The TJme-CUIIent Equation
An equation for the inverse time-current characteristic can
be derived from the following basic differential equation for
input dependent time delay as it applies to an induction
relay:
(9)
t>"(I.
Where:
MI
lp1'.~8
(8) De1ta-wye Transfonner (b) Small Motor
FJgUIe 6: Applications of a Dual Universal Overcurrent
Relay
is the ratio I/lp
is the input current in amperes
is the pickup current in amperes
is the spring torque
is the damping factor due to the drag magnet
is the angular displacement and d8/dt is the angular
velocity
CONCLUSION The small moment of inertia of the disc is neglected and thespring torque is represented by a constant because the effectof its gradient is compensated by an increase in torquecaused by the shape of the disc. Integrating Eq. 9 gives:
I. An analytic equation for induction-type inverse time-current characteristics has been derived. The integralequation also defines reset characteristic and thedynamics which guarantee close coordination withinduction relays under all conditions of varying current.
8 = f To ~ (M2-1)dt (10)o K
d
Dividing both sides of Eq .10 by 8 gives the dynamic
equation:
2. The equations of a motor thermal element have beenderived. The element exists as two-state thermal whichaccounts for the slip-dependent heating of positive- andnegative-sequence current. The model is defined bymotor nameplate and thermal-Iimit data and providesprotection during the abnormal conditions of overload,locked rotor, and unbalanced current.
J T. ~ (M2-1)dt = J T. -.!.-dt = 1 (11)o K,,9 o t(I)
where t(l) is the time-current characteristic and the constant
A equals ~9/T.:
3. The overcurrent elements applied for feeder, motor, and
breaker protection consist of sets of thermal, inverse-
time, definite-time, and instantaneous elements. These
elements, grouped by application, are collectively
accommodated as attributes of a universal overcurrent
relay.
Reset ChaI..:t..;sIic4. The issues of backup and redundancy have been
addressed by a dual-relay implementation. Where the time integral of any element can be reset in onecycle, an optional reset characteristic is available whenrequired for close coordination with existing induction
relays.
5. Negative-sequence elements, as well as traditional phase
and ground elements, are obtained from three phase-
current measurands. Negative-sequence elements with
induction-type characteristics coordinate directly with
phase and ground elements and can be set independentEq. 12 defines the induction characteristic for currentsbelow, as well as for currents above, the pickup current.
6
r Kd elt(I) = ~ -A (12)
(W -1 ) -'(M2:i)

[2] G. Benmouya1, and S. E. Zocholl, .Testing DynamicCharacteristics of Overcurrent Relays, .PEA Relay Com-mittee Fall Meeting, Hershey, PA, September 21-22, 1993.
If an induction disc bas an initial displacement from its resetposition when the applied current is reduced to zero, thedisc will be driven in a negative direction toward the resetposition. This is represented in Eq. 12 by setting M = 0,
which produces a negative number indicating the reset timeand the rotation of the disc in the direction toward reset.With this substitution, Eq. 12 gives the reset time 1.:
Kd e (13)
[3] A. F. Elneweihi. E. 0. Schweitzer. and M. W. Feltis."Negative-Sequence Overcurrent Element Application andCoordination in Distribution Protection. " IEEE Transactions
on Power Delivery. Volume 8. Number 3. June 1993. pp915-923.Itrl = -
[4] S. E. Zocho11, E. 0. Schweitzer ill, and A. Aliaga-Zegarra, "TherD1al Protection of Induction Motors Enhan-ced by Interactive Electrical and TherD1al Models, " IEEE
Transactions on Power Apparatus and SysteJns, VolumePAS-I03, Number 7, July 1984, pp 1749-1755.
7.
and the reset characteristic for any value of M between zero
and one is:
[5] B. N. Gafford, W. C. Duesterheoft Jr., and C. C.Mosher ill, "Heating of Induction Motors on UnbalancedVoltages, " AlEE Transactions, June 1959, pp 282-287.
[6] J. H. Dymond, "Stall Time, Acceleration Time,Frequency of Starting: The Myths and the Facts, " IEEE
Transactions on Industrial Applications, Volume 29,Number 1, January/February 1993.
REFERENCES [7] M. Shan Griffith, " A Penetrating Gaze at One Open
Phase: Analyzing the Polyphase Induction MotorDilemma, " IEEE Transactions on Industry Applications,
Volume IA-13, Number 4, November!December 1977, pp504-517.
[1] E. 0. Schweitzer and Daqing Hou, WFiltering For
Protective Relays,W 19th Annual Western Protective Relay
Conference, Spokane, WA, October 1992.
Copyright o IEEE 1994
(All rights reserved)Printed in USA