
Application of cohesive modeling in joining technology - … · Application of cohesive modeling in...
107
THESIS FOR THE DEGREE OF LICENTIATE OF ENGINEERING In Solid and Structural Mechanics Application of cohesive modeling in joining technology Thick adhesive layers and rivet joints SAEED SALIMI Department of Applied Mechanics CHALMERS UNIVERSITY OF TECHNOLOGY Gothenburg, Sweden, 2012
Transcript of Application of cohesive modeling in joining technology - … · Application of cohesive modeling in...
THESIS FOR THE DEGREE OF LICENTIATE OF ENGINEERING
In
Solid and Structural Mechanics
Application of cohesive modeling in joining technology
Thick adhesive layers and rivet joints
SAEED SALIMI
Department of Applied Mechanics CHALMERS UNIVERSITY OF TECHNOLOGY
Gothenburg, Sweden, 2012
Application of cohesive modeling in joining technology Thick adhesive layers and rivet joints SAEED SALIMI
© SAEED SALIMI, 2012
THESIS FOR LICENTIATE OF ENGINEERING no 2012:21 ISSN 1652-8565
Department of Applied Mechanics Chalmers University of Technology SE-421 96 Gothenburg Sweden Telephone: +46(0)31-772 1000
Chalmers Reproservice Gothenburg, Sweden 2012
i
Application of cohesive modeling in joining technology Thesis for the degree of Licentiate of Engineering SAEED SALIMI Department of Applied Mechanics Chalmers University of Technology
ABSTRACT
This thesis summarizes the development of cohesive modeling of joints. It presents some
new developments regarding the effects of non-zero thickness of adhesive layers and a
novel approach of using the concept of cohesive modeling to characterize the failure
behavior of rivet joints.
The failure behavior of a thick adhesive layer loaded in mode I (peel), mode II (shear)
and mixed-mode are studied. Analytical relations are derived for the energy release rate
of DCBa-, ENFb- and MCBc-tests for pure peel, shear and mixed modes of loading,
respectively. Consequently, cohesive laws are derived from the energy release rate. The
results are used to predict the failure of three sets of TRBd-tests with similar and
dissimilar adherents bonded with a thick layer of adhesive and loaded in mixed mode.
Moreover, a model to characterize the failure behavior of rivet joints is investigated and
presented.
Data from DCB-, ENF- and MCB-experiments are evaluated and used to simulate and
predict the failure behavior of TRB-tests. The results of simulations are verified by the
results of three sets of TRB-experiments. To this end, sixteen TRB-experiments are
carried out in this work.
The main achievement of this thesis is validating the use of cohesive modeling to model
adhesively bonded joints with dissimilar adherents bonded with a thick layer of adhesive.
The proposed model for studying the failure behavior of rivet joints is also found to show
good agreement with numerical analyses.
Keywords: Thick adhesive layer, J-integral, mixed-mode cohesive failure, rivet joints,
mixed material
a Double Cantilever Beam b End Notch Flexure c Mixed-mode Cantilever Beam d Tensile Reinforced Bending

ii
iii
Preface
The work presented in this thesis has been carried out at the Mechanics of Materials research group at the University of Skövde. It is a part of a co-operation with the Mechanics of Materials group at the Department of Applied Mechanics at Chalmers University of Technology, Sweden.
First, I would like to give special thank and my deepest gratitude to my supervisor Professor Ulf Stigh, who gave me the opportunity not only to expand my knowledge in our research field but also to start a new life. I would also like to express my sincere gratitude to my assistant supervisor Dr. Svante Alfredsson for his constructive and extensive guidance and to my examiner Professor Lennart Josefson for his supports during my study. Furthermore, I would like to thank Dr. Anders Biel for his supports in performing the experiments.
Last but not least, I would like to thank my dear parents in Iran for their supports and inspiration.
Skövde, November 2012 Saeed Salimi

iv
v
Table of Contents
Abstract i Preface iii Table of Contents v 1 Introduction 1
1.1 Background 1 1.2 Objectives 3 1.3 Outlines of thesis 3
2 Theory 4 2.1 Fracture mechanics approach 4
2.1.1 Background 4 2.1.2 Failure of adhesive joints 9 2.1.3 Direct method 12 2.1.4 Derivation of J-integral for thick adhesive layers 15
2.2 Rivet joints 25 2.2.1 Introduction 25 2.2.2 Specimen design 27 2.2.3 Finite element analysis 28
2.3 Cohesive zone modeling 33 2.3.1 Introduction 33 2.3.2 Cohesive laws 34 2.3.3 Bilinear cohesive law 34
3 Experiments 44 3.1 DCB-experiment 45 3.2 ENF-experiment 49 3.3 MCB-experiment 55 3.4 TRB-experiment 60
4 Simulation of Experiments 70 4.1 ENF-simulation 71 4.2 MCB-simulation 75 4.3 TRB-simulation 80
5 Summary and Conclusions 83
References 85 Appendix: DCB-, ENF-, MCB- and TRB-tests’ data 89
Nomenclature 96

vi
1
1 Introduction
1-1 Background
Joining techniques such as bolting, riveting, welding and other conventional methods are
used by industry all over the world. An alternative method of joining has also emerged to
be highly successful: adhesive bonding. Adhesive bonding is a material joining process in
which an adhesive layer is placed between the adherents’ surfaces and solidifies to
produce an adhesive bond. Adhesively bonded joints are an alternative to mechanical
joints in engineering applications, particularly in dissimilar material joining, and provide
many advantages over conventional mechanical fasteners. Among these advantages are
lowering the fabrication cost and improving the damage tolerance, cf. Brockmann et al.
(2009). Adhesive joining provides a more uniform stress distribution along the bonded
area which enables a higher stiffness and more uniform load transmission, cf. Kinloch
(1987). Nevertheless, adhesive joints inevitably contain flaws, voids and discontinuities
within the adhesive layer and at the interfaces. Moreover, stress singularity due to elastic
mismatches which develops at the region of interface corner may initiate failure. As such,
adhesive joints sometimes fail unexpectedly and severely under a relatively low
mechanical or thermal load in service, cf. Afendi and Teramoto (2009). In order to have
high reliability and significant strength performance of adhesive joints, the strength and
fracture toughness of adhesive joints should be properly characterized and determined.
Fracture studies are usually carried out under several idealized conditions, as in the case
of linear elastic fracture mechanics. In such case, the details of the local crack tip fields
are characterized by a single macroscopic parameter such as the stress intensity factors
(KI, KII, KIII) or the corresponding energy release rates (GI, GII, GIII). These global
parameters are related to the corresponding material parameters; typically the fracture
energies, Ic IIc IIIc, ,G G G or the fracture toughnesses Ic IIc IIIc, ,K K K which determine the
critical conditions of initiation of crack growth, cf. Broek (1982). When the crack tip
experiences severe plastic yielding, the above concepts, based purely on the theory of
elasticity, are not valid and have led to the introduction of a path independent J-integral,
cf. Rice (1968). On the other hand, the fracture mechanics analysis presupposes the
existence of an infinitely sharp crack tip leading to singular crack tip fields. However, in
real materials neither the sharpness of the crack nor the stress levels near the crack tip
region can be infinite.
2
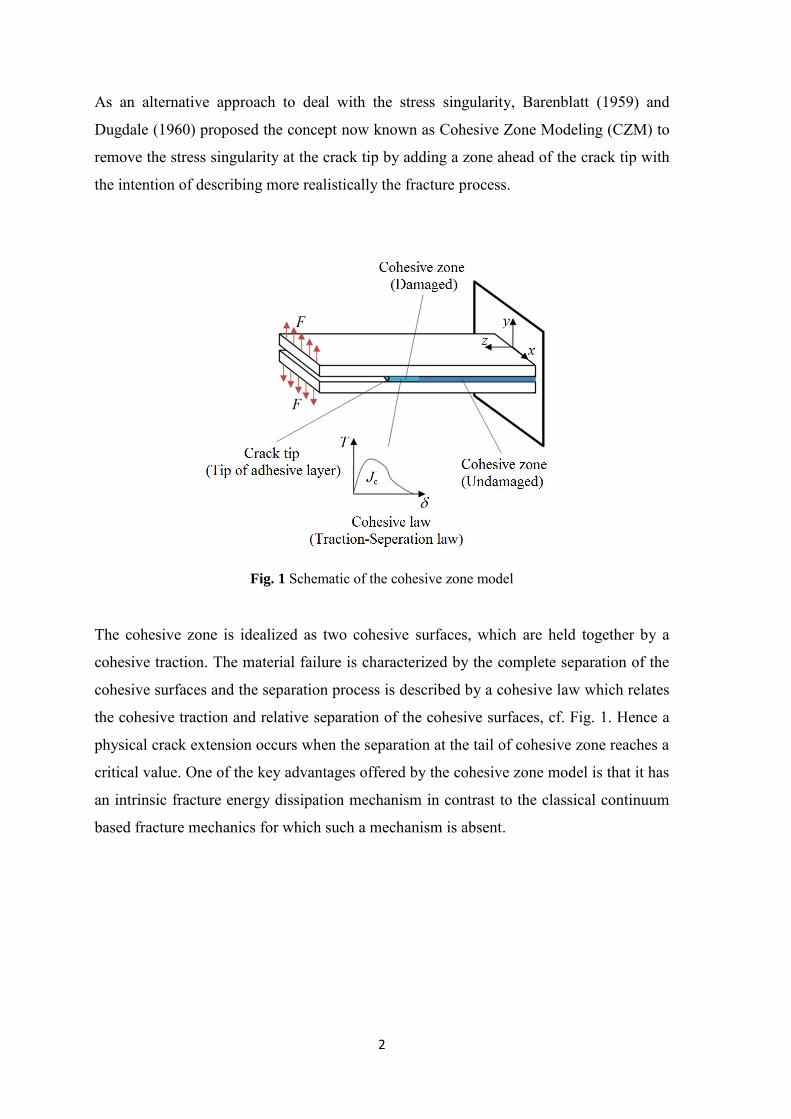
As an alternative approach to deal with the stress singularity, Barenblatt (1959) and
Dugdale (1960) proposed the concept now known as Cohesive Zone Modeling (CZM) to
remove the stress singularity at the crack tip by adding a zone ahead of the crack tip with
the intention of describing more realistically the fracture process.
Fig. 1 Schematic of the cohesive zone model
The cohesive zone is idealized as two cohesive surfaces, which are held together by a
cohesive traction. The material failure is characterized by the complete separation of the
cohesive surfaces and the separation process is described by a cohesive law which relates
the cohesive traction and relative separation of the cohesive surfaces, cf. Fig. 1. Hence a
physical crack extension occurs when the separation at the tail of cohesive zone reaches a
critical value. One of the key advantages offered by the cohesive zone model is that it has
an intrinsic fracture energy dissipation mechanism in contrast to the classical continuum
based fracture mechanics for which such a mechanism is absent.
3
1.2 Objectives
In this work, the application of cohesive modeling to predict the load-bearing capacity of
adhesive joints, with finite thickness of the adhesive layer, is investigated and the
possibility of using the same technique to study the failure behavior of rivet joints is
investigated. This thesis aims at: (1) Deriving analytical relations for the energy release
rate of Double Cantilever Beam test (DCB), End Notch Flexure test (ENF) and Mixed-
mode Cantilever Beam test (MCB) for pure peel, shear and mixed modes of loading,
respectively. These relations are used to calculate the stress distribution of joints with a
thick adhesive layer. (2) Carrying out experiments to verify the analytical models. (3)
Using the finite element method (ABAQUS) to study the cohesive failure of adhesively
bonded joints. (4) Investigating the possibility of using similar techniques to characterize
the failure behavior of discrete joints like rivet joints.
1.3 Outline of the thesis
The thesis starts with an overview of the methods for analyses of adhesively bonded
joints in chapter 1 followed in chapter 2 with a summary of the theory of fracture
mechanics and its application to derive relations for the J-integral for thick adhesive
layers loaded in mode I, II and mixed mode are presented. The possibility of using
cohesive modeling for studying the failure behavior of rivet joints is evaluated in section
2.2. The theoretical bases of cohesive zone modeling are studied in section 2.3.
In chapter 3, experimental results of three sets of Tensile Reinforced Bending tests
(TRB), carried out in this thesis, are presented and evaluated. The results of three series
of experiments (DCB, ENF, MCB) are evaluated to be used for characterizing the
behavior of an adhesive in a general state of planar mixed mode loading.
In chapter 4, the commercial finite element package ABAQUS is used to simulate the
experiments studied in chapter 3, aiming at refining the concept of cohesive modeling.
In chapter 5, the experimental results from chapter 3 and the results of the simulations
from chapter 4 along with the analytical results from chapter 2 are compared and
discussed. Moreover, the conclusions of the thesis are given.
4
2 Theory
2.1 Fracture mechanics approach
2.1.1 Background
A brief literature review of the history of fracture mechanics from Razvan (2009) is
presented in this section. In 1776, Coulomb studied crack propagation in stones under
compression. In 1898, G. Kirsch obtained an analytical solution for the stress around a
circular hole in an infinite plate under remote uniform stress. In 1913, Inglis published a
paper in which he made an analysis of the state of stress in the vicinity of a crack tip. The
ideas from Inglis’ paper were further developed in 1920 by a young engineer, Alan
Arnold Griffith, who analyzed the phenomena in a structured way from an energetic point
of view. The main idea of Griffith’s work was the idea that crack propagation is
determined by the relation between the release of potential energy and the necessary
surface energy to create new surface area as a crack grows. Griffith asserted that when a
crack propagates, the decrease of the potential energy is compensated by the increase of
the surface energy caused by the tension in the newly created crack surfaces. In 1948, a
professor from the Lehigh University, George Rankine Irwin, showed that Griffith’s
relation should include the work done in a plastic region, at the crack tip. He introduced a
new crack propagation principle in fracture mechanics: A crack will propagate if the
energy release rate G equals the critical work necessary to create new crack surfaces and
this work incorporates the plastic work at the crack tip. One of the most important results
of Irwin is the demonstration of the fact that the state of stress in the vicinity of the crack
tip is completely determined by the stress intensity factors KI, KII and KIII.
In 1957, Irwin proposed the first experimental method for the study of cracks, called
electric resistive tensometry. In 1959, Barenblatt was the first to take the cohesive forces
in the vicinity of the crack tip in the linear elasticity theory into consideration. His theory
is based on a tractions relation, which considers separation of interfaces. Barenblatt
assumes the existence of cohesive traction around the crack tip within the linear elasticity
frame. In 1960, Dugdale assumed that the traction is due to plastic yielding of the
material. These ideas were later implemented in standard finite element algorithms, in
commercial codes, incorporating the interfaces in the structures of the finite elements.
5
The ideas of Barenblatt (1959) and Dugdale (1960) on the cohesive modeling and the
interface element modeling were further developed by a large number of researchers. In
1987, Needleman (1987) and Stigh (1987) independently introduced cohesive finite
elements. The method was implemented in FE-codes, cf. e.g. Gerken et al. (2001) and in
the commercial finite element code ABAQUS (1997).
2.1.1.1 Fracture Failure Modes
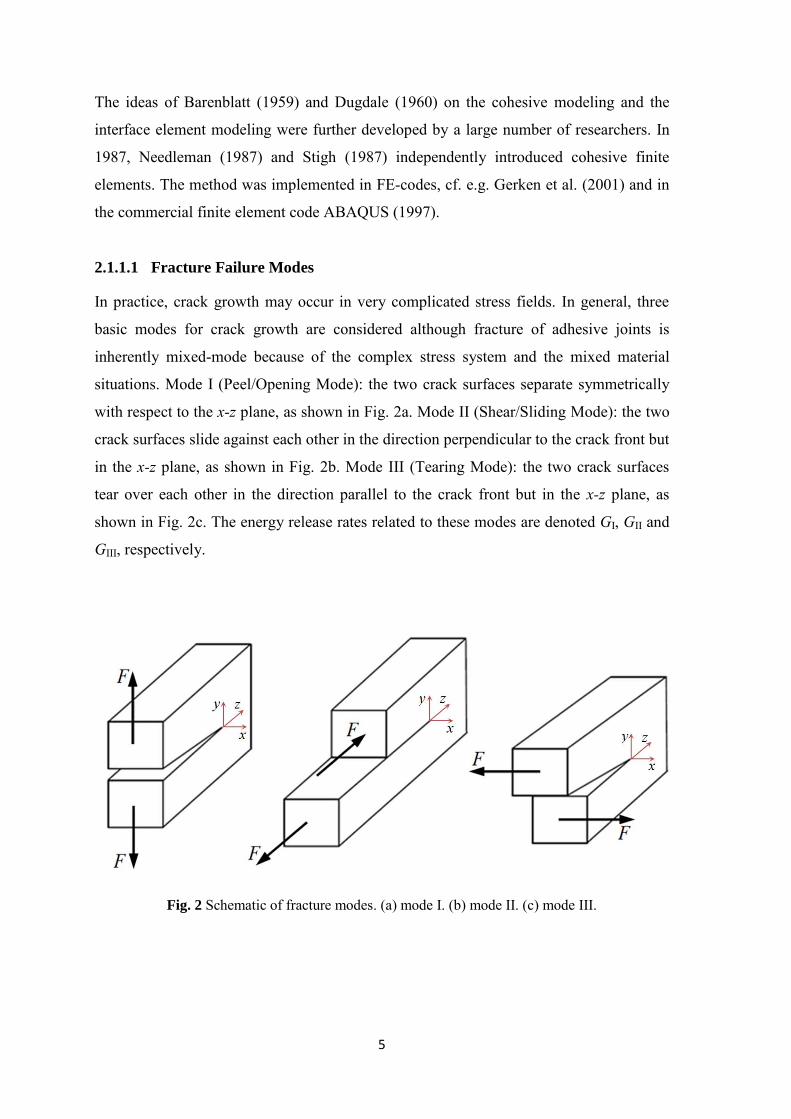
In practice, crack growth may occur in very complicated stress fields. In general, three
basic modes for crack growth are considered although fracture of adhesive joints is
inherently mixed-mode because of the complex stress system and the mixed material
situations. Mode I (Peel/Opening Mode): the two crack surfaces separate symmetrically
with respect to the x-z plane, as shown in Fig. 2a. Mode II (Shear/Sliding Mode): the two
crack surfaces slide against each other in the direction perpendicular to the crack front but
in the x-z plane, as shown in Fig. 2b. Mode III (Tearing Mode): the two crack surfaces
tear over each other in the direction parallel to the crack front but in the x-z plane, as
shown in Fig. 2c. The energy release rates related to these modes are denoted GI, GII and
GIII, respectively.
Fig. 2 Schematic of fracture modes. (a) mode I. (b) mode II. (c) mode III.
6
2.1.1.2 Linear Elastic Fracture Mechanics
In the regime where the global stress-strain response is linear and elastic, the elastic
energy release rate, G, and the stress intensity factor K can be used for characterizing the
loading of cracks in structures.
In the energy approach of Linear Elastic Fracture Mechanics (LEFM), the fracture
behavior is described by the variation of the potential energy due to crack extension. This
is characterized by the energy release rate, G. The energy release rate is defined as the
decrease of the total potential energy with respect to crack extension under constant load,
that is
dd
Ga
where a is the crack length and Π is the total potential energy per unit thickness of
system. Thus, in fracture mechanics, the total potential energy is the source for crack
growth. Accordingly, an energy criterion for the onset of crack growth is defined in the
following general form:
c c2G G
In which G is known as the crack driving force, and c is the surface energy per unit area
of the crack.
The energy release rate, G, can be considered as the energy source for crack growth. It
can be obtained from a stress analysis of the cracked body if the inelastic behavior of the
crack tip can be neglected. On the other hand, the surface energy, c , can be considered
as the energy sink and depends on many factors including the chemical composition and
microstructure of the material, temperature, environment and loading rate. The
experimentally measured critical energy release rate, Gc, for engineering materials,
specifically metals, is significantly larger than c2 and this is because plastic deformation
in the crack tip region also contributes significantly to the crack growth resistance. For a
perfectly brittle solid (NaCl single crystal), it has been shown that Gc= c2 is valid, cf.
e.g. Sun and Jin (2011).
7
2.1.1.3 Mixed Mode Failure Criteria
Failure criteria for mixed-mode fracture can be developed in a way analogous to the
classical failure criteria. Various mathematical fracture surfaces have been proposed to fit
the experimental results, such as:
I II III
Ic IIc IIc
1G G GG G G
where IcG , IIcG and IIIcG are the fracture toughness under pure mode I, II and III of
loading, respectively. The linear energetic criterion ( 1 ) and the quadratic one ( 2 )
are the most used. The exponents may be chosen to form the best fit of experimental data
or may be prescribed based on some assumed relationship, cf. e.g. Sun and Jin (2011).
2.1.1.4 Nonlinear Fracture Mechanics
When a crack occurs in a ductile body, a plastic region appears in the vicinity of the crack
tip. If the size of this plastic region is substantial, G cannot be determined from the elastic
stress field, since G may be affected by the crack tip plastic zone (e.g. Forman, 1967). In
1951, Eshelby introduced the concept of the force on a singularity and derived a path
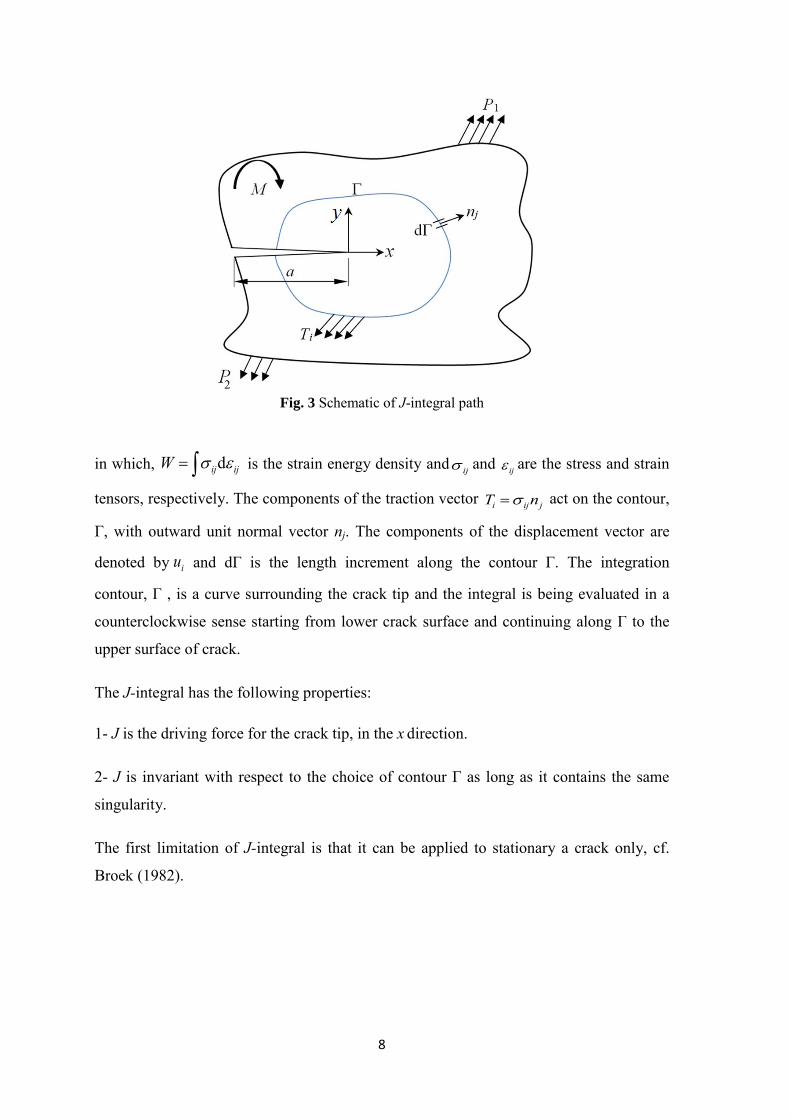
independent integral, cf. Fig. 3. In 1968 Rice applied this integral to crack problems and
denoted it the J-integral. J is the release of potential energy for a virtual crack extension
da per unit width of the crack front.
Because the J-integral is applicable for infinite as well as finite applications,
homogeneous as well as inhomogeneous, linear as well as non-linear materials, it is a
very powerful tool for determining the crack extension force, cf. Weinberger et al.
(2005). For a linear elastic material J=G but J remains the energy release rate for a
nonlinear elastic material. Thus, one can postulate that a crack grows if J exceeds a
critical value Jc which is analogous to Gc and equals to Gc if LEFM can be applied.
In two dimensional problems, the J-integral is written for a crack along x direction as
d dii
uJ W y Tx
(1)
8
Fig. 3 Schematic of J-integral path
in which, dij ijW is the strain energy density and ij and ij are the stress and strain
tensors, respectively. The components of the traction vector i ij jT n act on the contour,
Г, with outward unit normal vector nj. The components of the displacement vector are
denoted by iu and dГ is the length increment along the contour Г. The integration
contour, Г , is a curve surrounding the crack tip and the integral is being evaluated in a
counterclockwise sense starting from lower crack surface and continuing along Г to the
upper surface of crack.
The J-integral has the following properties:
1- J is the driving force for the crack tip, in the x direction.
2- J is invariant with respect to the choice of contour Г as long as it contains the same
singularity.
The first limitation of J-integral is that it can be applied to stationary a crack only, cf.
Broek (1982).
9
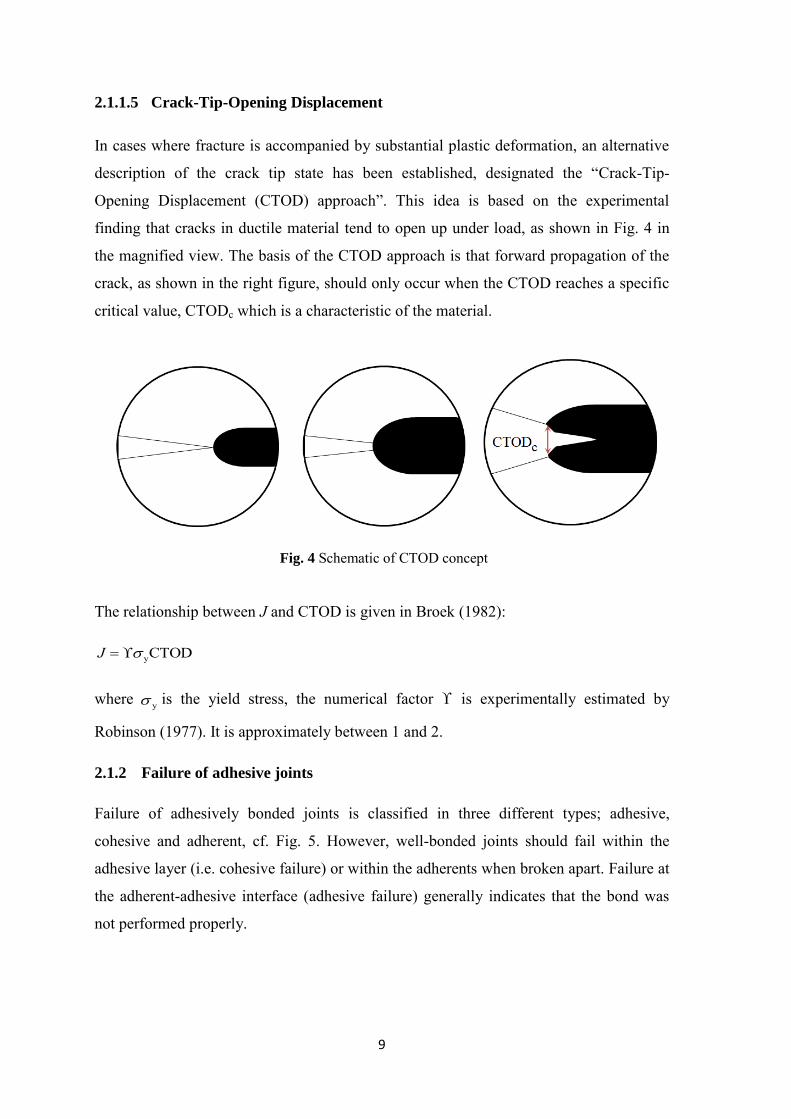
2.1.1.5 Crack-Tip-Opening Displacement
In cases where fracture is accompanied by substantial plastic deformation, an alternative
description of the crack tip state has been established, designated the “Crack-Tip-
Opening Displacement (CTOD) approach”. This idea is based on the experimental
finding that cracks in ductile material tend to open up under load, as shown in Fig. 4 in
the magnified view. The basis of the CTOD approach is that forward propagation of the
crack, as shown in the right figure, should only occur when the CTOD reaches a specific
critical value, CTODc which is a characteristic of the material.
Fig. 4 Schematic of CTOD concept
The relationship between J and CTOD is given in Broek (1982):
yCTODJ
where y is the yield stress, the numerical factor is experimentally estimated by
Robinson (1977). It is approximately between 1 and 2.
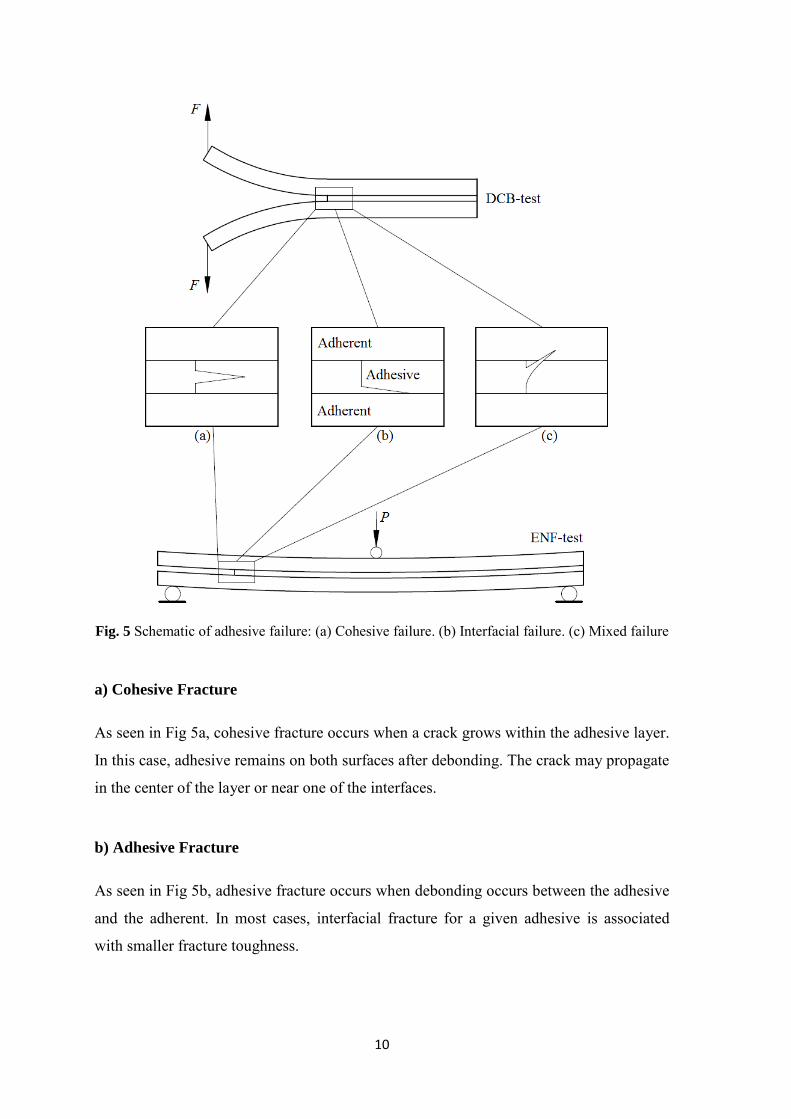
2.1.2 Failure of adhesive joints
Failure of adhesively bonded joints is classified in three different types; adhesive,
cohesive and adherent, cf. Fig. 5. However, well-bonded joints should fail within the
adhesive layer (i.e. cohesive failure) or within the adherents when broken apart. Failure at
the adherent-adhesive interface (adhesive failure) generally indicates that the bond was
not performed properly.
10
Fig. 5 Schematic of adhesive failure: (a) Cohesive failure. (b) Interfacial failure. (c) Mixed failure
a) Cohesive Fracture
As seen in Fig 5a, cohesive fracture occurs when a crack grows within the adhesive layer.
In this case, adhesive remains on both surfaces after debonding. The crack may propagate
in the center of the layer or near one of the interfaces.
b) Adhesive Fracture
As seen in Fig 5b, adhesive fracture occurs when debonding occurs between the adhesive
and the adherent. In most cases, interfacial fracture for a given adhesive is associated
with smaller fracture toughness.

11
c) Other types of fracture
Mixed types occur if the crack propagates at some spots in a cohesive and in other spots in
an adhesive manner, cf. Fig. 5c. Mixed fracture surfaces can be characterized by a certain
percentage of adhesive and cohesive areas. The alternating crack path type occurs if the
crack jumps from one interface to the other. This type of fracture appears in the presence
of tensile in-plane pre-stresses in the adhesive layer, cf. e.g. Fleck et al. (1991). Fracture
can also occur in the adherent if the adhesive is tougher than the adherent. In this case, the
adhesive remains intact and is still bonded to the adherents. For example, when one
removes a price label, the adhesive usually remains on the label and the surface. This is
cohesive failure. Although a layer of paper remains stuck to the surface, the adhesive has
not failed.
12
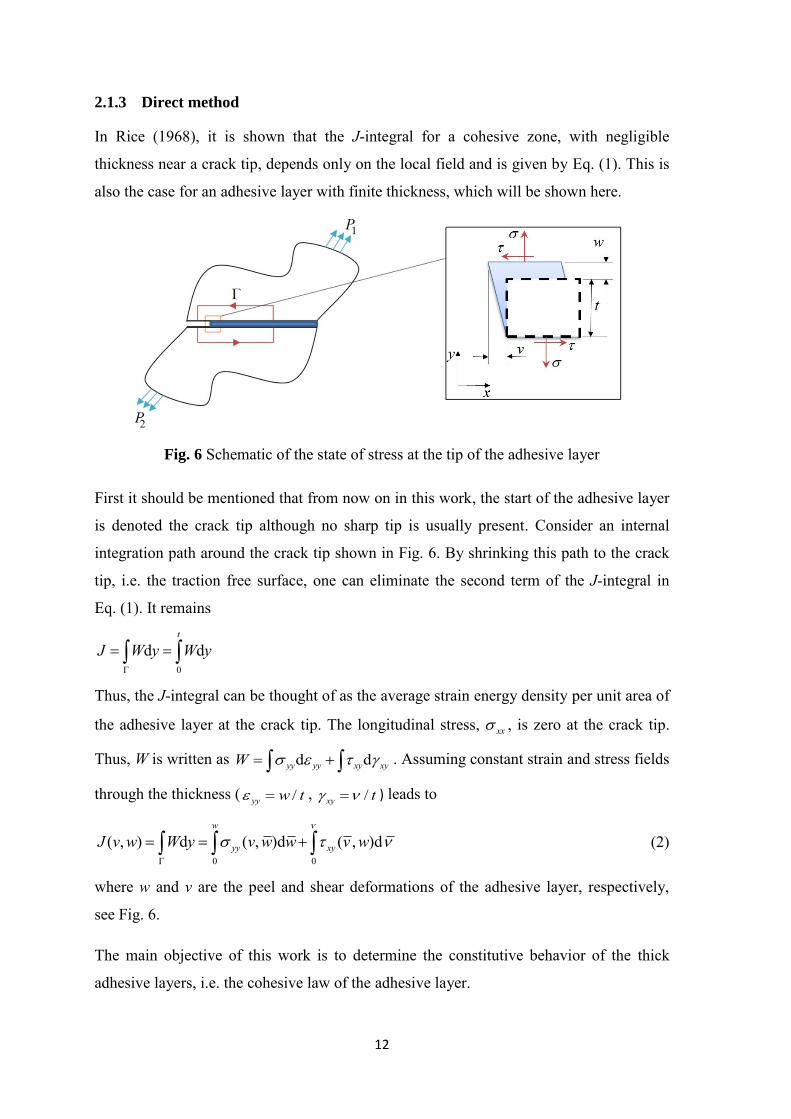
2.1.3 Direct method
In Rice (1968), it is shown that the J-integral for a cohesive zone, with negligible
thickness near a crack tip, depends only on the local field and is given by Eq. (1). This is
also the case for an adhesive layer with finite thickness, which will be shown here.
Fig. 6 Schematic of the state of stress at the tip of the adhesive layer
First it should be mentioned that from now on in this work, the start of the adhesive layer
is denoted the crack tip although no sharp tip is usually present. Consider an internal
integration path around the crack tip shown in Fig. 6. By shrinking this path to the crack
tip, i.e. the traction free surface, one can eliminate the second term of the J-integral in
Eq. (1). It remains
0
d dt
J W y W y
Thus, the J-integral can be thought of as the average strain energy density per unit area of
the adhesive layer at the crack tip. The longitudinal stress, xx , is zero at the crack tip.
Thus, W is written as d dyy yy xy xyW . Assuming constant strain and stress fields
through the thickness ( /yy w t , /xy t ) leads to
0 0
( , ) d ( , )d ( , )dw
yy xyJ v w W y v w w v w
(2)
where w and v are the peel and shear deformations of the adhesive layer, respectively,
see Fig. 6.
The main objective of this work is to determine the constitutive behavior of the thick
adhesive layers, i.e. the cohesive law of the adhesive layer.
13
By the direct method, the complete cohesive law for a given adhesive can be measured by
differentiation of the J-v or J-w curves. A few works currently exist on the direct
parameter determination of adhesive bonds (Sørensen, 2002) and fiber reinforced
composites (Sørensen and Jacobsen, 2003). Andersson and Stigh (2004) use an direct
method to determine the cohesive parameters in peel mode of loading for a ductile
adhesive bond in DCB test configuration. Leffler et al. (2007) use a similar method to
measure the cohesive parameters in shear loading of a ductile adhesive bond using an
ENF test configuration.
Shear and peel deformations at the crack tip (v, w) and J are measured during the
experiments. To this end, having an expression for J in terms of measurable parameters is
needed for each test configuration. These kinds of expressions are derived in the next
sections. To determine the cohesive law, the differentiation of J with respect to v and w
needs to be taken as follows
( , ) Jw vw
, ( , ) Jw vv
(3)
These differentiations of experimental data J(v, w) might cause a substantial scatter. In
order to minimize the scatter, we first fit a polynomial of order k to the experimental J-v
and J-w curves. Then the differentiation with respect to v and w are taken. The
polynomial-series are given by
0
ki
ii
J w A w
, 0
ki
ii
J v Av
The alternative method is to fit a Prony-series with k terms to the experimental J-v and J-
w curves and then differentiate with respect to v and w. The Prony-series are given by
1 c
expk
ii
kwJ w Aiw
,
1 c
expk
ii
kvJ v Aiv
The parameters Ai of both types of series are determined by a least square fit procedure.
The choice of the number of terms, k, in both cases, is made based by visual comparison
of the fitted and experimental curves, cf. Fig. 7.
14
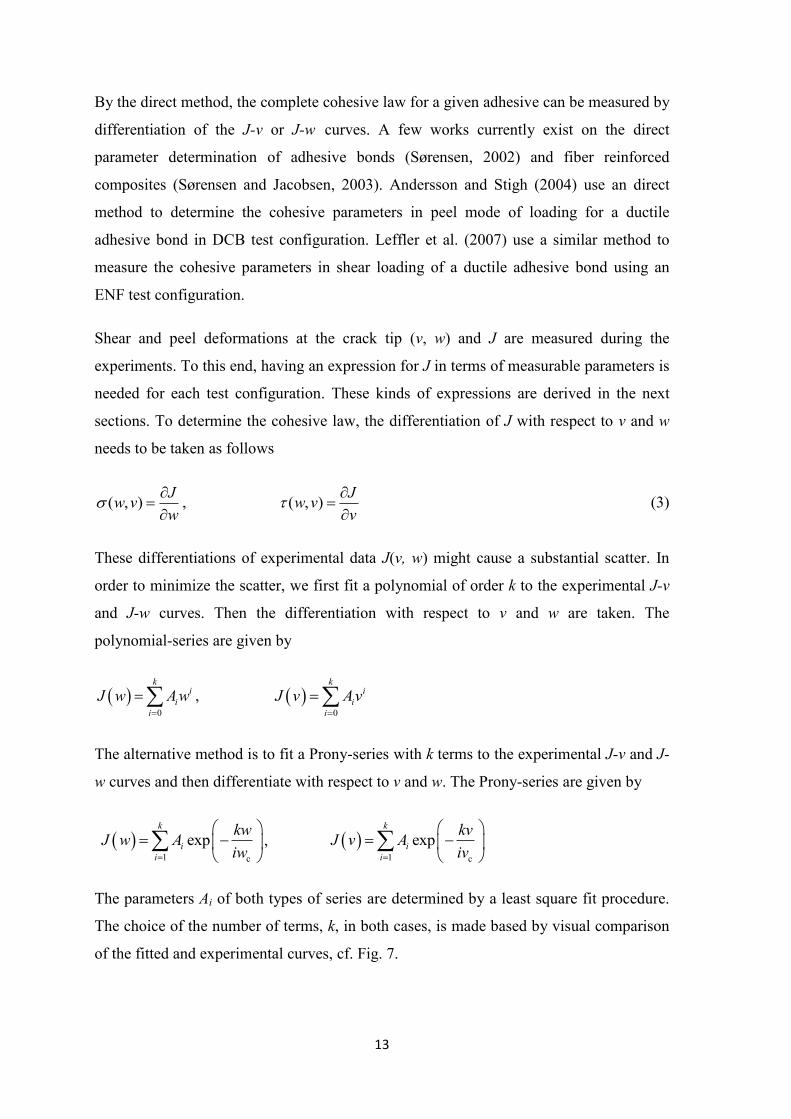
The value of Jc is taken as the maximum value of J from the experiment; wc and vc are
the corresponding deformations. Figure 7 shows the experimental curve and the fitted
curves, by Prony-series, for an ENF-test. As seen in this Fig.7, with k=14 good agreement
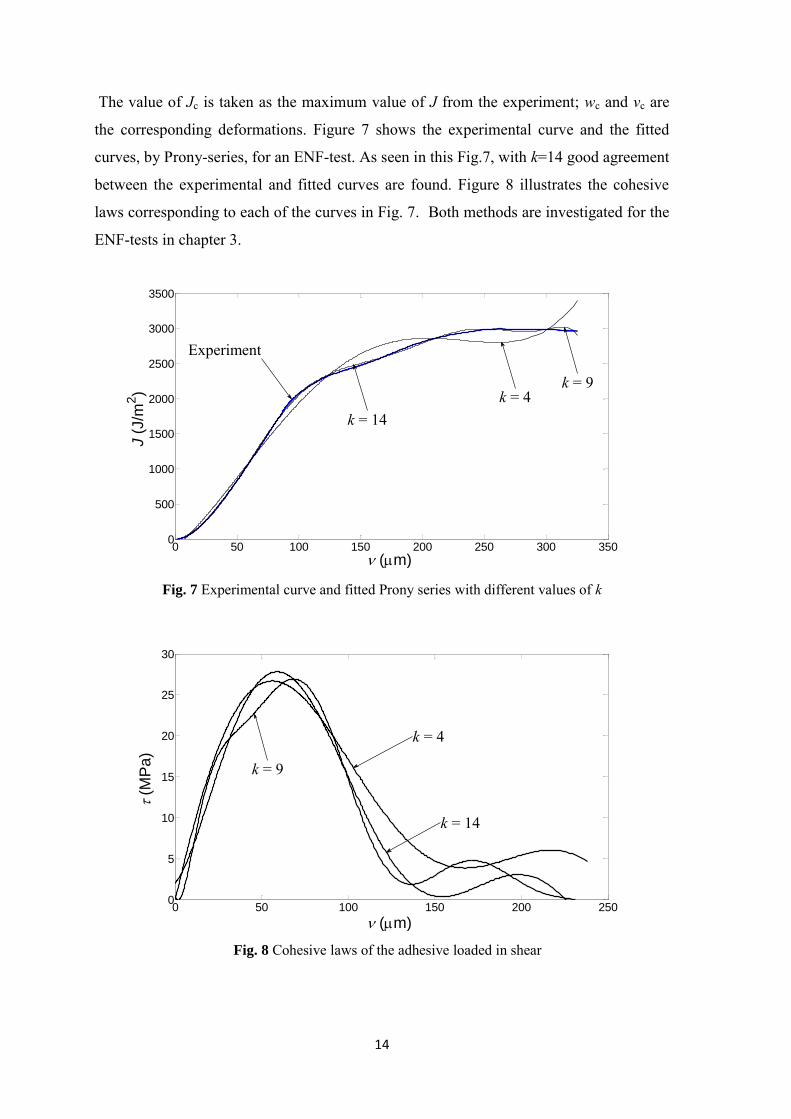
between the experimental and fitted curves are found. Figure 8 illustrates the cohesive
laws corresponding to each of the curves in Fig. 7. Both methods are investigated for the
ENF-tests in chapter 3.
Fig. 7 Experimental curve and fitted Prony series with different values of k
Fig. 8 Cohesive laws of the adhesive loaded in shear
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500
3000
3500
(m)
J (
J/m
2)
k = 14k = 4
k = 9
Experiment
0 50 100 150 200 2500
5
10
15
20
25
30
(m)
(M
Pa)
k = 9
k = 4
k = 14
15
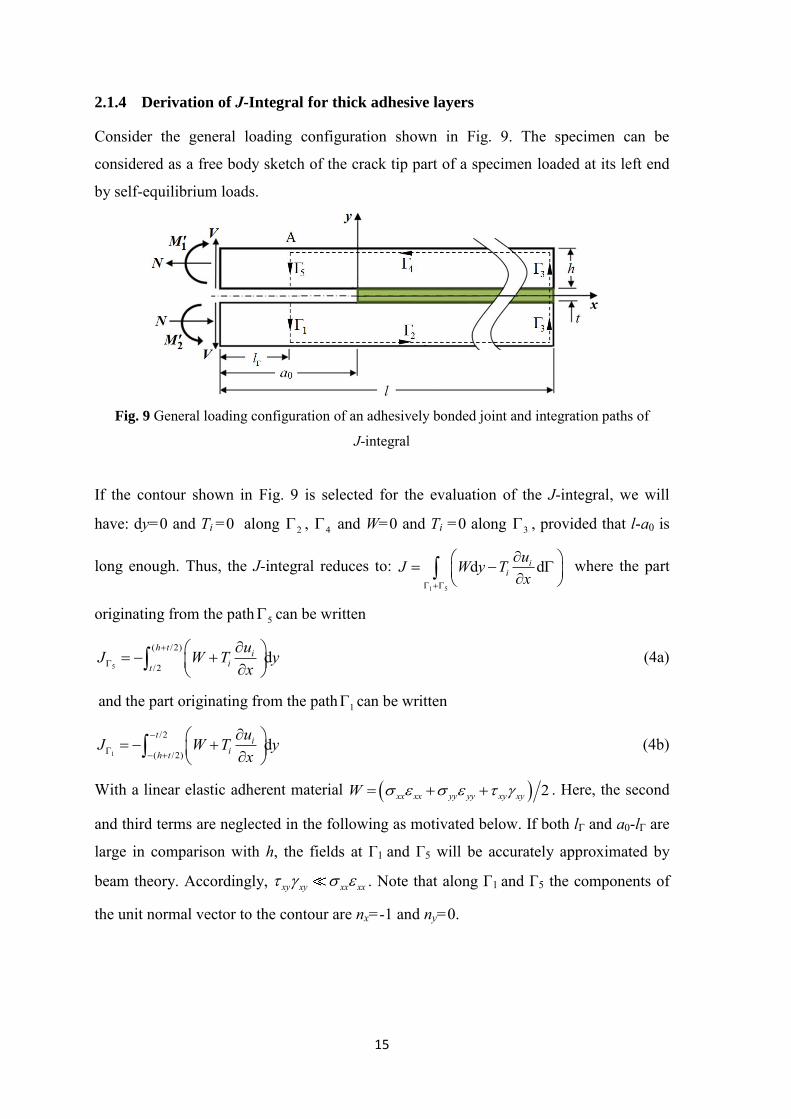
2.1.4 Derivation of J-Integral for thick adhesive layers
Consider the general loading configuration shown in Fig. 9. The specimen can be
considered as a free body sketch of the crack tip part of a specimen loaded at its left end
by self-equilibrium loads.
Fig. 9 General loading configuration of an adhesively bonded joint and integration paths of
J-integral
If the contour shown in Fig. 9 is selected for the evaluation of the J-integral, we will
have: dy=0 and Ti =0 along 2 , 4 and W=0 and Ti =0 along 3 , provided that l-a0 is
long enough. Thus, the J-integral reduces to: 1 5
d dii
uJ W y Tx
where the part
originating from the path 5 can be written
5
( /2)
/2d
h t iit
uJ W T yx
(4a)
and the part originating from the path 1 can be written
1
/2
( /2)d
t iih t
uJ W T yx
(4b)
With a linear elastic adherent material 2xx xx yy yy xy xyW . Here, the second
and third terms are neglected in the following as motivated below. If both lΓ and a0-lΓ are
large in comparison with h, the fields at Γ1 and Γ5 will be accurately approximated by
beam theory. Accordingly, xy xy xx xx . Note that along Γ1 and Γ5 the components of
the unit normal vector to the contour are nx=-1 and ny=0.
16
Thus,
1 xxT and 2 xyT
1xx
ux
and 2A
ux
where A is the clockwise rotation angle of the adherent at the cross section A.
The cross section A always passes through the Γ1 and Γ5, cf. Fig. 9. Insertion into (4a)
and (4b) yields
5
( /2)
A/2
1 d2
h t
xx xx xyt
J y
(5a)
1
/2
A( /2)
1 d2
t
xx xx xyh t
J y
(5b)
Equations (5a) and (5b) are general expressions to be used for the DCB- and MCB-
specimens.
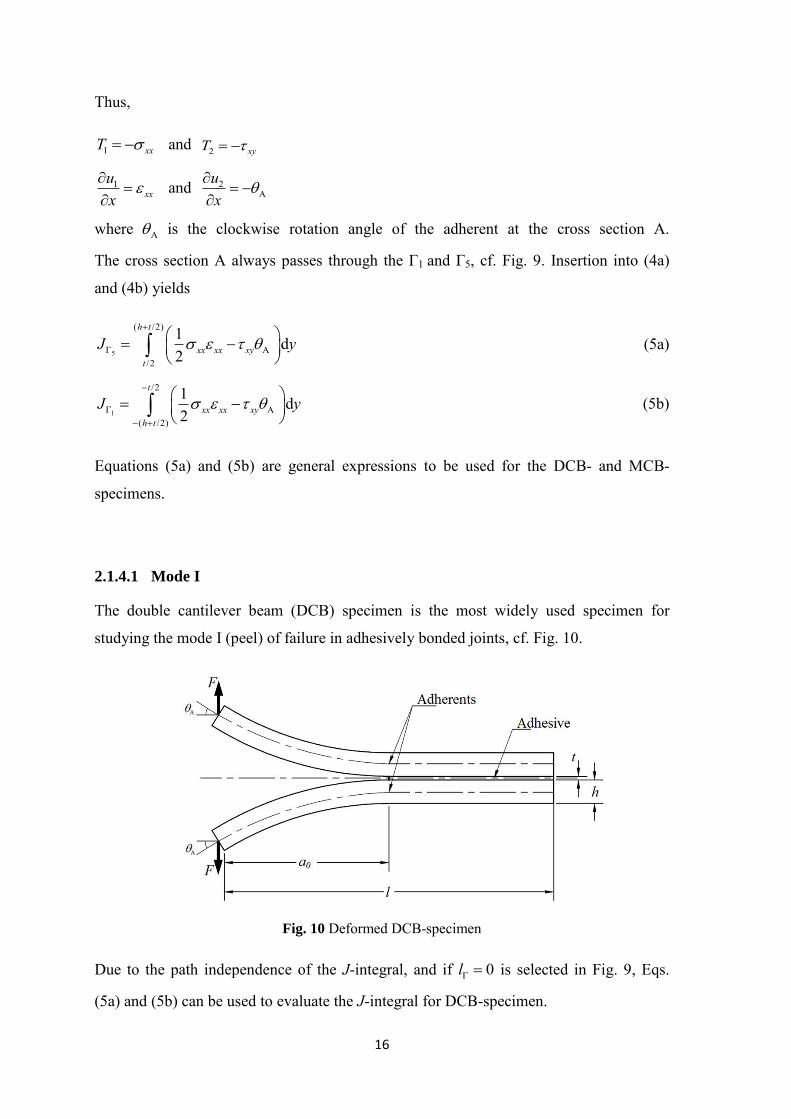
2.1.4.1 Mode I
The double cantilever beam (DCB) specimen is the most widely used specimen for
studying the mode I (peel) of failure in adhesively bonded joints, cf. Fig. 10.
Fig. 10 Deformed DCB-specimen
Due to the path independence of the J-integral, and if 0l is selected in Fig. 9, Eqs.
(5a) and (5b) can be used to evaluate the J-integral for DCB-specimen.
17
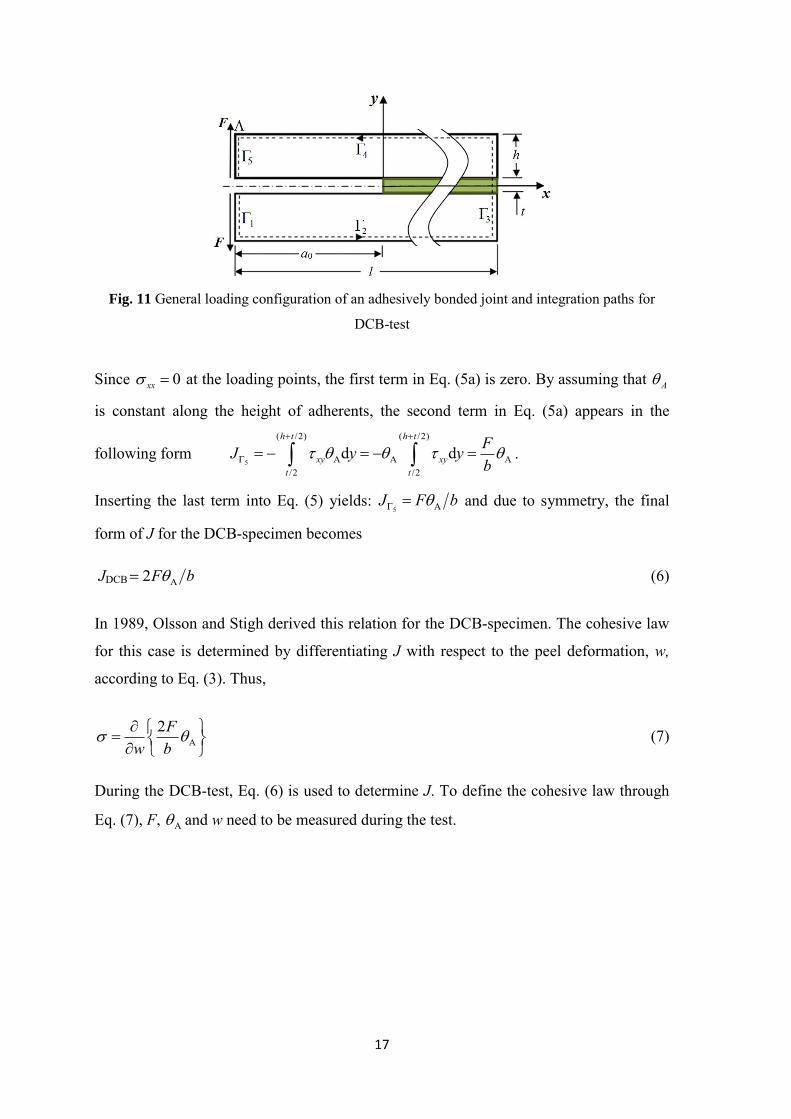
Fig. 11 General loading configuration of an adhesively bonded joint and integration paths for
DCB-test
Since 0xx at the loading points, the first term in Eq. (5a) is zero. By assuming that A
is constant along the height of adherents, the second term in Eq. (5a) appears in the
following form 5
( /2) ( /2)
A A A/2 /2
d dh t h t
xy xyt t
FJ y yb
.
Inserting the last term into Eq. (5) yields: 5 AJ F b and due to symmetry, the final
form of J for the DCB-specimen becomes
JDCB A2F b (6)
In 1989, Olsson and Stigh derived this relation for the DCB-specimen. The cohesive law
for this case is determined by differentiating J with respect to the peel deformation, w,
according to Eq. (3). Thus,
A2F
w b
(7)
During the DCB-test, Eq. (6) is used to determine J. To define the cohesive law through
Eq. (7), F, A and w need to be measured during the test.
18
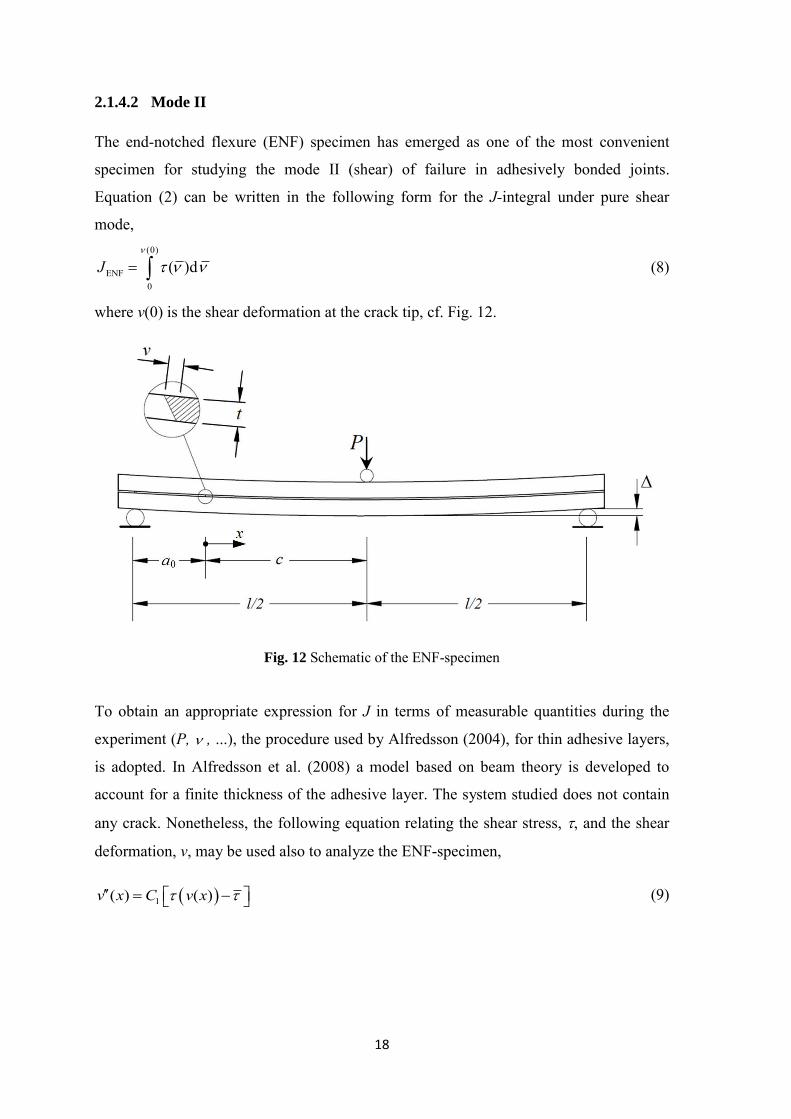
2.1.4.2 Mode II
The end-notched flexure (ENF) specimen has emerged as one of the most convenient
specimen for studying the mode II (shear) of failure in adhesively bonded joints.
Equation (2) can be written in the following form for the J-integral under pure shear
mode, (0)
ENF0
( )dJ
(8)
where v(0) is the shear deformation at the crack tip, cf. Fig. 12.
Fig. 12 Schematic of the ENF-specimen
To obtain an appropriate expression for J in terms of measurable quantities during the
experiment (P, , ...), the procedure used by Alfredsson (2004), for thin adhesive layers,
is adopted. In Alfredsson et al. (2008) a model based on beam theory is developed to
account for a finite thickness of the adhesive layer. The system studied does not contain
any crack. Nonetheless, the following equation relating the shear stress, , and the shear
deformation, v, may be used also to analyze the ENF-specimen,
1( ) ( )v x C v x (9)
19
where 2
18 3 31
2 4t tC
Eh h h
and where E is the elastic modulus of the beam material. In Eq. (9), is the shear stress
predicted by ordinary beam theory,
2
138 3 31
2 4
tP hbh t t
h h
(10)
where P is the applied force, t is the thickness of adhesive layer, h is the thickness of
adherents, b is the specimen’s width.
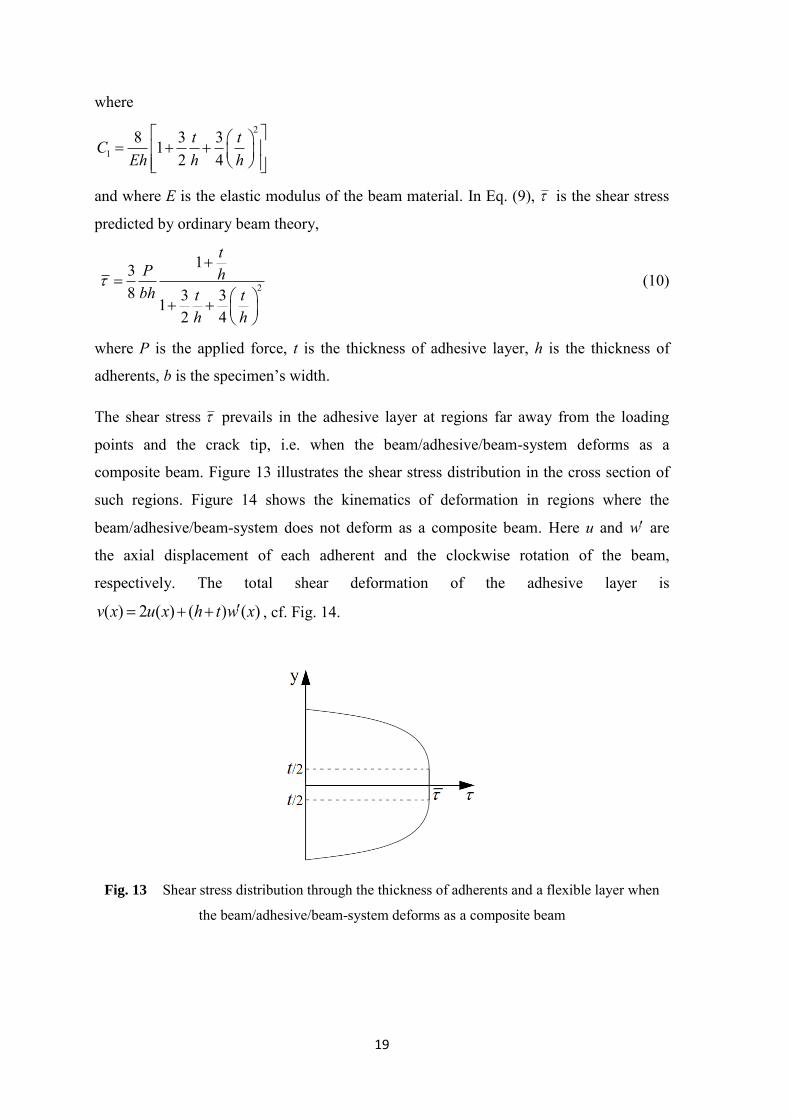
The shear stress prevails in the adhesive layer at regions far away from the loading
points and the crack tip, i.e. when the beam/adhesive/beam-system deforms as a
composite beam. Figure 13 illustrates the shear stress distribution in the cross section of
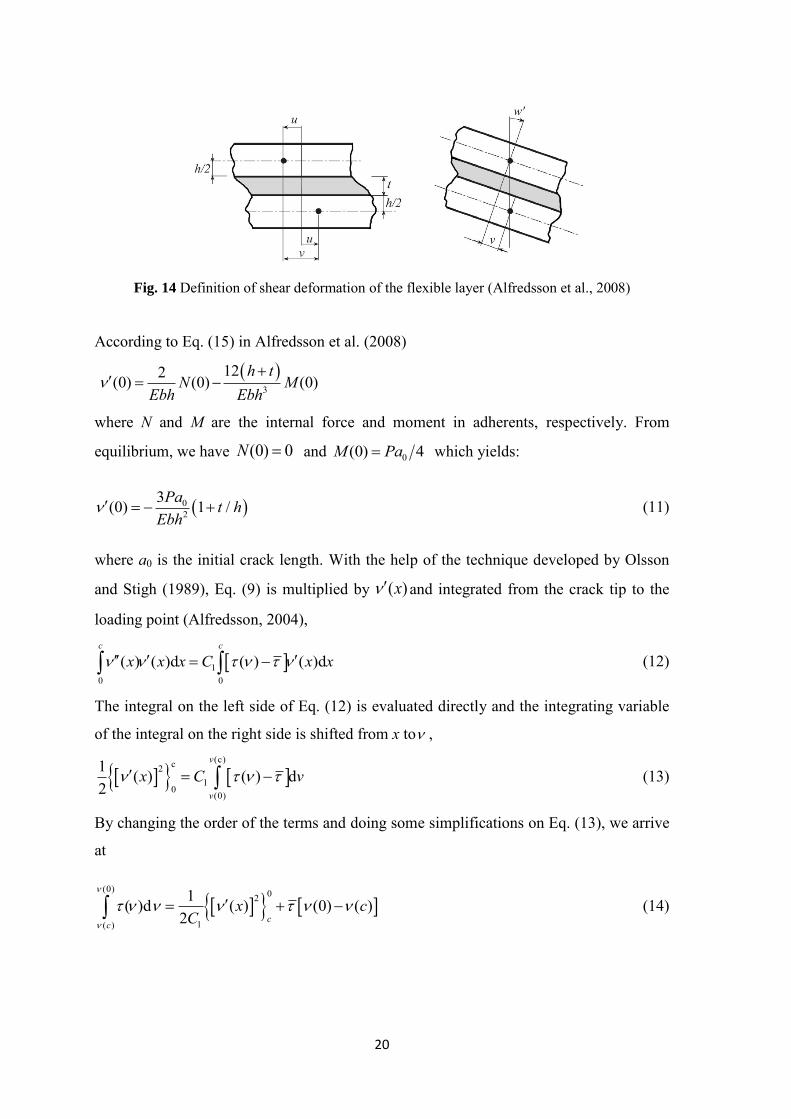
such regions. Figure 14 shows the kinematics of deformation in regions where the
beam/adhesive/beam-system does not deform as a composite beam. Here u and w are
the axial displacement of each adherent and the clockwise rotation of the beam,
respectively. The total shear deformation of the adhesive layer is
( ) 2 ( ) ( ) ( )v x u x h t w x , cf. Fig. 14.
Fig. 13 Shear stress distribution through the thickness of adherents and a flexible layer when
the beam/adhesive/beam-system deforms as a composite beam
20
Fig. 14 Definition of shear deformation of the flexible layer (Alfredsson et al., 2008)
According to Eq. (15) in Alfredsson et al. (2008)
3
122(0) (0) (0)h t
N MEbh Ebh
where N and M are the internal force and moment in adherents, respectively. From
equilibrium, we have (0) 0N and 0(0) 4M Pa which yields:
02
3(0) 1 /Pa t hEbh
(11)
where a0 is the initial crack length. With the help of the technique developed by Olsson
and Stigh (1989), Eq. (9) is multiplied by ( )x and integrated from the crack tip to the
loading point (Alfredsson, 2004),
10 0
( ) ( )d ( ) ( )dc c
x x x C x x
(12)
The integral on the left side of Eq. (12) is evaluated directly and the integrating variable
of the integral on the right side is shifted from x to ,
(c)c2
10
(0)
1 ( ) ( ) d2
v
v
x C v
(13)
By changing the order of the terms and doing some simplifications on Eq. (13), we arrive
at
(0) 02
1( )
1( )d ( ) (0) ( )2 c
c
x cC
(14)

21
Using Eq. (8), the energy release rate is identified as
( )
2 2ENF
10
1( )d (0) ( ) (0) ( )2
c
J c cC
Inserting the boundary conditions from Eq. (11) and from Eq. (10), the ERR appears in
the following form:
2
( )2 220
ENF 2 22 31 0
1 19 3 1 ( ) ( )d16 8 23 3 3 31 1
2 4 2 4
ct t
P a Pvh hJ cEb h bh Ct t t t
h h h h
(15)
where v = v(0) is the shear deformation of the adhesive at the crack tip and ( )c is the
shear deformation of the adhesive at the loading point, cf. Fig. 12.
For specimens long enough to ensure that the shear deformation at the loading point is
small, ( ) (0)c and ( ) (0)c , the last two terms in Eq. (15) can be neglected.
In this case we have,
ENF 0 1J J J (16)
where
2
2 20
0 2 2 3
19
163 312 4
tP ahJEb ht t
h h
and 1 2
1 383 31
2 4
tPhJbht t
h h
.
The stress-deformation relation for shear is obtained by differentiating of J with respect
to the shear deformation, v.
2 2
22 3
19 31
16 8 3 312 4
tP a t P hEb h h bh t t
h h
(17)
Equation (17) is a generalized relation of the previous results by Alfredsson (2004) and
Leffler et al. (2007), accounting for a finite thickness of the adhesive layer. To measure
the cohesive law through the Eq. (17), P and v need to be measured during an experiment.
22
2.1.4.3 Mixed-mode
Various attempts have been made to characterize the fracture toughness under mixed-
mode loading conditions in adhesively bonded joints, where mostly beam type specimens
have been used (Sørensen and Kirkegaard, 2006; Högberg et al., 2007; and Choupani,
2008). The mixed-mode cantilever beam (MCB) test specimen developed by Högberg et
al. (2007) is used to study the mixed-mode fracture of adhesively bonded joints in this
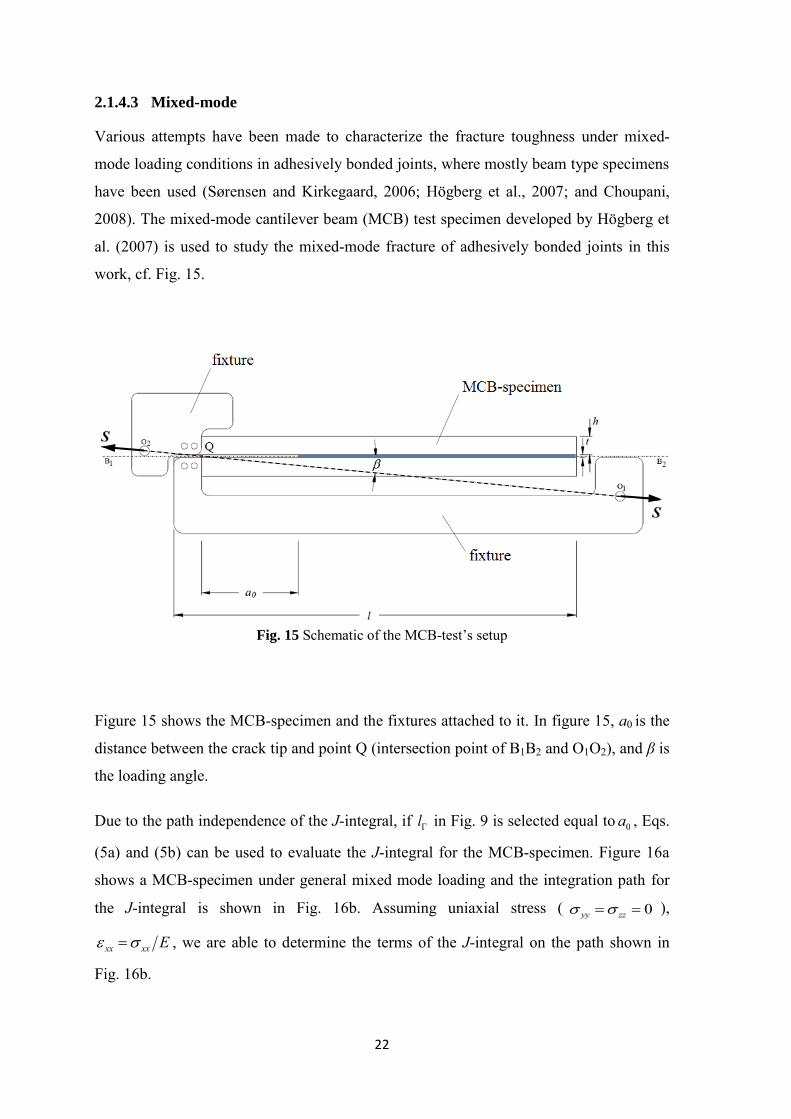
work, cf. Fig. 15.
Fig. 15 Schematic of the MCB-test’s setup
Figure 15 shows the MCB-specimen and the fixtures attached to it. In figure 15, a0 is the
distance between the crack tip and point Q (intersection point of B1B2 and O1O2), and β is
the loading angle.
Due to the path independence of the J-integral, if l in Fig. 9 is selected equal to 0a , Eqs.
(5a) and (5b) can be used to evaluate the J-integral for the MCB-specimen. Figure 16a
shows a MCB-specimen under general mixed mode loading and the integration path for
the J-integral is shown in Fig. 16b. Assuming uniaxial stress ( 0yy zz ),
xx xx E , we are able to determine the terms of the J-integral on the path shown in
Fig. 16b.
23
(a)
(b)
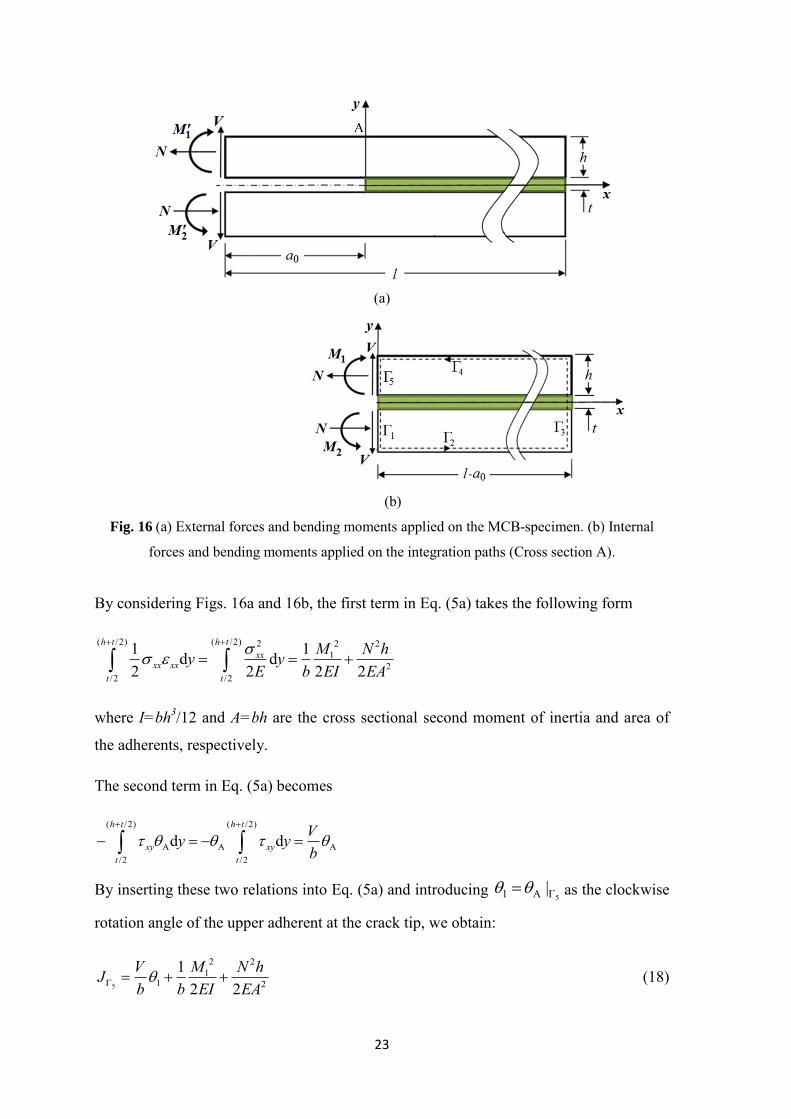
Fig. 16 (a) External forces and bending moments applied on the MCB-specimen. (b) Internal
forces and bending moments applied on the integration paths (Cross section A).
By considering Figs. 16a and 16b, the first term in Eq. (5a) takes the following form
( /2) ( /2) 2 2 21
2/2 /2
1 1d d2 2 2 2
h t h txx
xx xxt t
M N hy yE b EI EA
where I=bh3/12 and A=bh are the cross sectional second moment of inertia and area of
the adherents, respectively.
The second term in Eq. (5a) becomes
( /2) ( /2)
A A A/2 /2
d dh t h t
xy xyt t
Vy yb
By inserting these two relations into Eq. (5a) and introducing 51 A | as the clockwise
rotation angle of the upper adherent at the crack tip, we obtain:
5
2 21
1 2
12 2MV N hJ
b b EI EA
(18)

24
In a similar fashion, by using Eq. (5b) and assuming that 12 A | is the clockwise
rotation angle of the lower adherent at the crack tip, we obtain 1
J for lower adherent
1
2 22
2 2
12 2MV N hJ
b b EI EA
By adding 5
J and
1J
the total J for MCB specimen appears in the following form
JMCB 2 2 2
1 21 2 2 3 2
6( )M MV Nb Eb h Eb h
(19)
From equilibrium, the cross-sectional forces and moments at the crack tip, cf. Figs. 15
and 16a, are given by
sinV S , cosN S , 1,2 0 2h tM Va N
(20)
where S is the applied force with angle with respect to the x-axis and h is the thickness
of adherent and t is the thickness of adhesive layer, see Fig. 15.
By inserting Eq. (20) into Eq. (19), we finally arrive at
JMCB
2 2 220
1 2 2 3 2
12 sin 4 cossin 3 3( ) 12 4
S a SS t tb Eb h Eb h h h
(21)
Thus, measurement of the applied force, S, and the rotational angles, 1 and 2 , are
required to experimentally determine J.
25
2.2 Rivet joints
2.2.1 Introduction
In engineering practice it is often required that two sheets or plates are joined together
and carry the load. Many times such joints are required to be leak proof so that gas
contained inside is not allowed to escape. A rivet joint is easily conceived between two
plates overlapping at edges, making holes through thickness of both, passing the stem of
rivet through holes and creating the head at the end of the stem on the other side. Such
joints have been used in structures, boilers and ships. Riveting is also a widely used
joining technology in the automotive and aerospace industries.
General failure models to predict the fracture behavior of joints made by riveting are
needed by designers but have not yet been developed. Accurate prediction of stresses
within and around a joint is a fundamental step in estimating the structural strength of
joints. A major difficulty in modeling rivet joints is how to idealize the load transfer
between the rivet and the plates. The resulting stress distribution around the rivet holes is
largely influenced by this idealization. Such predictions require both suitable failure
criteria and a method for implementing these criteria into numerical calculations. Both
strength-based and energy-based failure criteria are used for predicting the performance
of rivet joints. However, the use of a fracture mechanics based failure criteria is not
appropriate unless the scale of plastic deformation in a structure is much smaller than any
characteristic length. Owing to large-scale plasticity that accompanies fracture, this
condition is generally violated with any riveted sheet metal. Fracture problems in which
plastic deformation is significant can be analyzed by the use of cohesive-zone models that
incorporate both strength and energy criteria for fracture.
This thesis provides a novel approach of using cohesive modeling for analyzing riveted
structures in predicting the strength of rivet joints. The cohesive zone modeling within
finite element calculations is used to capture the fracture and failure load of rivet joints.
This technique uses two material parameters, cohesive strength and toughness, to
characterize the failure behavior of the joints under each mode of loading.
26
In 1938, Volkersen proposed a simple shear lag model for rivet joints. This model was
later on adopted for adhesively bonded lap joints with the assumption that the adherents
deform in tension and the adhesive in shear only. Moreover, both stresses are considered
constant across the thickness of the adhesive layer, cf. Fig. 17. That is the Volkersen
solution does not reflect effects of the adherent bending and shear deformations. These
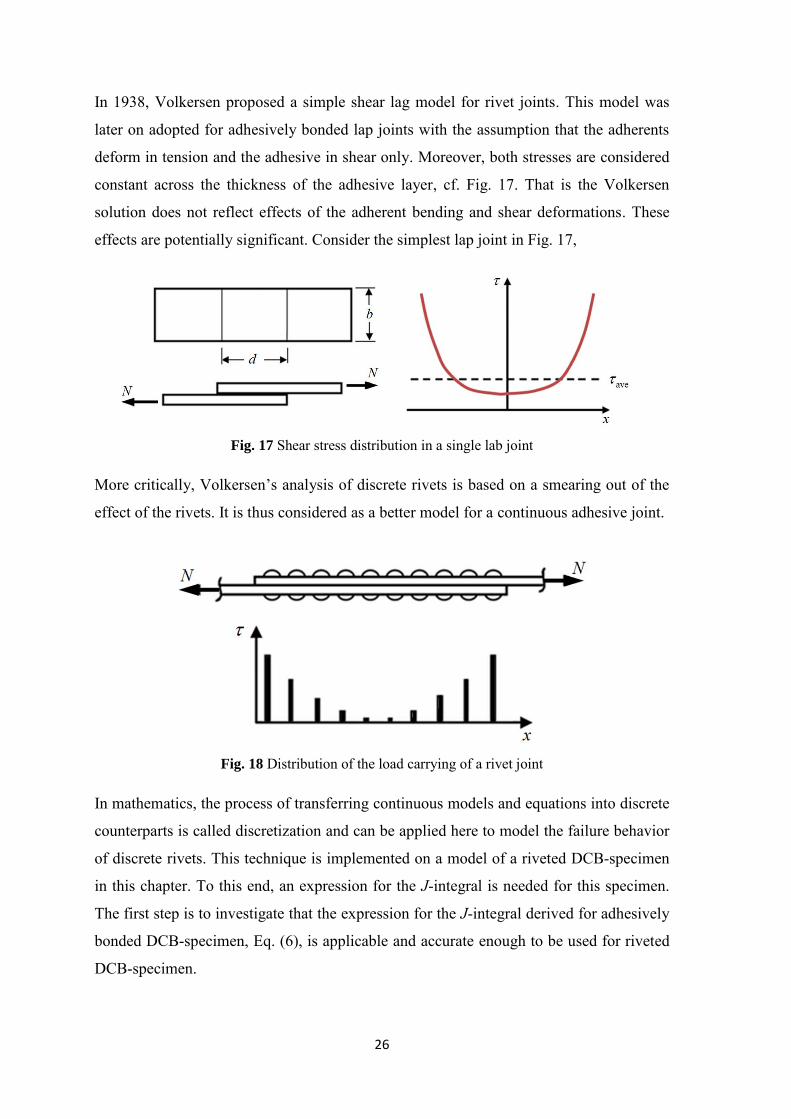
effects are potentially significant. Consider the simplest lap joint in Fig. 17,
Fig. 17 Shear stress distribution in a single lab joint
More critically, Volkersen’s analysis of discrete rivets is based on a smearing out of the
effect of the rivets. It is thus considered as a better model for a continuous adhesive joint.
Fig. 18 Distribution of the load carrying of a rivet joint
In mathematics, the process of transferring continuous models and equations into discrete
counterparts is called discretization and can be applied here to model the failure behavior
of discrete rivets. This technique is implemented on a model of a riveted DCB-specimen
in this chapter. To this end, an expression for the J-integral is needed for this specimen.
The first step is to investigate that the expression for the J-integral derived for adhesively
bonded DCB-specimen, Eq. (6), is applicable and accurate enough to be used for riveted
DCB-specimen.
27
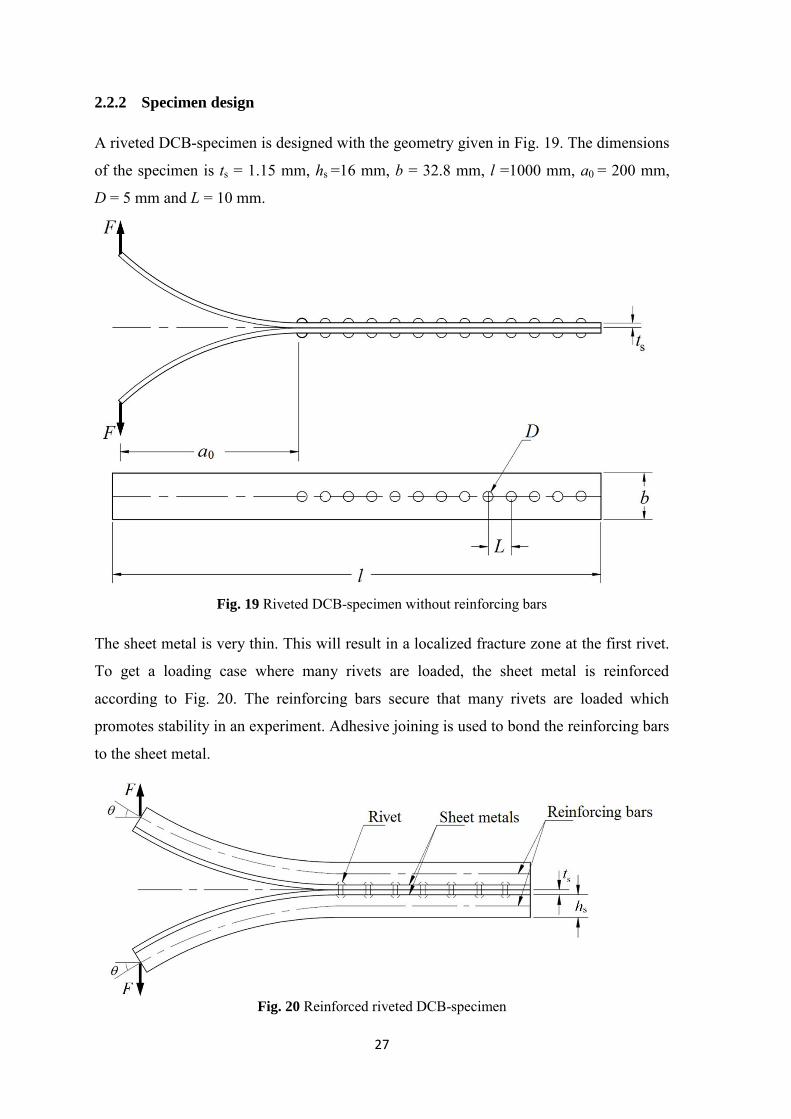
2.2.2 Specimen design
A riveted DCB-specimen is designed with the geometry given in Fig. 19. The dimensions
of the specimen is ts = 1.15 mm, hs =16 mm, b = 32.8 mm, l =1000 mm, a0 = 200 mm,
D = 5 mm and L = 10 mm.
Fig. 19 Riveted DCB-specimen without reinforcing bars
The sheet metal is very thin. This will result in a localized fracture zone at the first rivet.
To get a loading case where many rivets are loaded, the sheet metal is reinforced
according to Fig. 20. The reinforcing bars secure that many rivets are loaded which
promotes stability in an experiment. Adhesive joining is used to bond the reinforcing bars
to the sheet metal.
Fig. 20 Reinforced riveted DCB-specimen
28
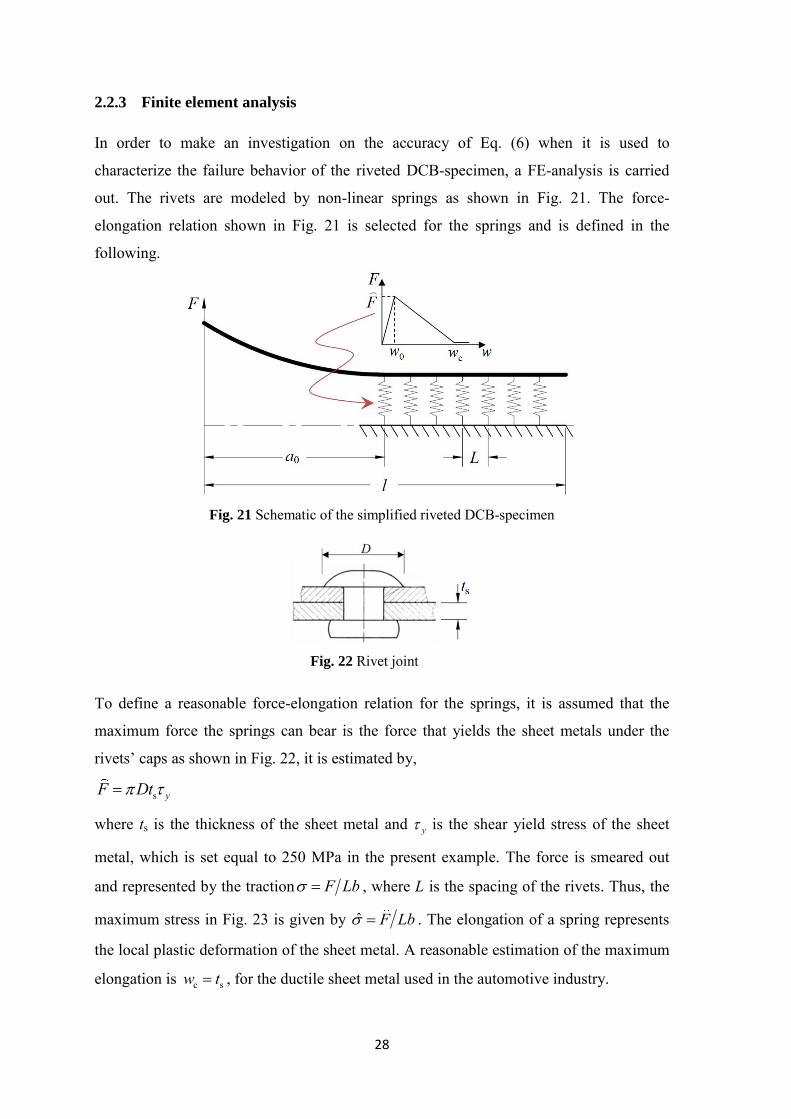
2.2.3 Finite element analysis
In order to make an investigation on the accuracy of Eq. (6) when it is used to
characterize the failure behavior of the riveted DCB-specimen, a FE-analysis is carried
out. The rivets are modeled by non-linear springs as shown in Fig. 21. The force-
elongation relation shown in Fig. 21 is selected for the springs and is defined in the
following.
Fig. 21 Schematic of the simplified riveted DCB-specimen
Fig. 22 Rivet joint
To define a reasonable force-elongation relation for the springs, it is assumed that the
maximum force the springs can bear is the force that yields the sheet metals under the
rivets’ caps as shown in Fig. 22, it is estimated by,
s yF Dt
where ts is the thickness of the sheet metal and y is the shear yield stress of the sheet
metal, which is set equal to 250 MPa in the present example. The force is smeared out
and represented by the traction F Lb , where L is the spacing of the rivets. Thus, the
maximum stress in Fig. 23 is given by ˆ F Lb . The elongation of a spring represents
the local plastic deformation of the sheet metal. A reasonable estimation of the maximum
elongation is c sw t , for the ductile sheet metal used in the automotive industry.
29
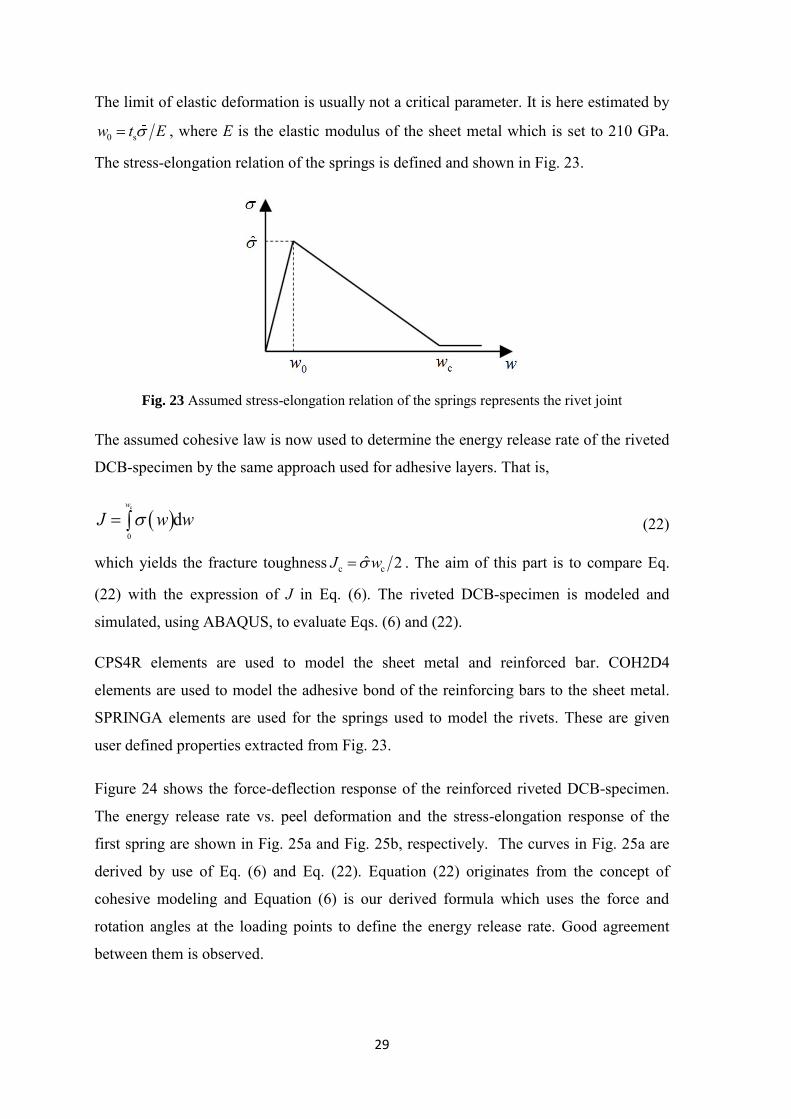
The limit of elastic deformation is usually not a critical parameter. It is here estimated by
0 sw t E , where E is the elastic modulus of the sheet metal which is set to 210 GPa. The stress-elongation relation of the springs is defined and shown in Fig. 23.
Fig. 23 Assumed stress-elongation relation of the springs represents the rivet joint
The assumed cohesive law is now used to determine the energy release rate of the riveted
DCB-specimen by the same approach used for adhesive layers. That is,
c
0
dw
J w w
(22)
which yields the fracture toughness c cˆ 2J w . The aim of this part is to compare Eq.
(22) with the expression of J in Eq. (6). The riveted DCB-specimen is modeled and
simulated, using ABAQUS, to evaluate Eqs. (6) and (22).
CPS4R elements are used to model the sheet metal and reinforced bar. COH2D4
elements are used to model the adhesive bond of the reinforcing bars to the sheet metal.
SPRINGA elements are used for the springs used to model the rivets. These are given
user defined properties extracted from Fig. 23.
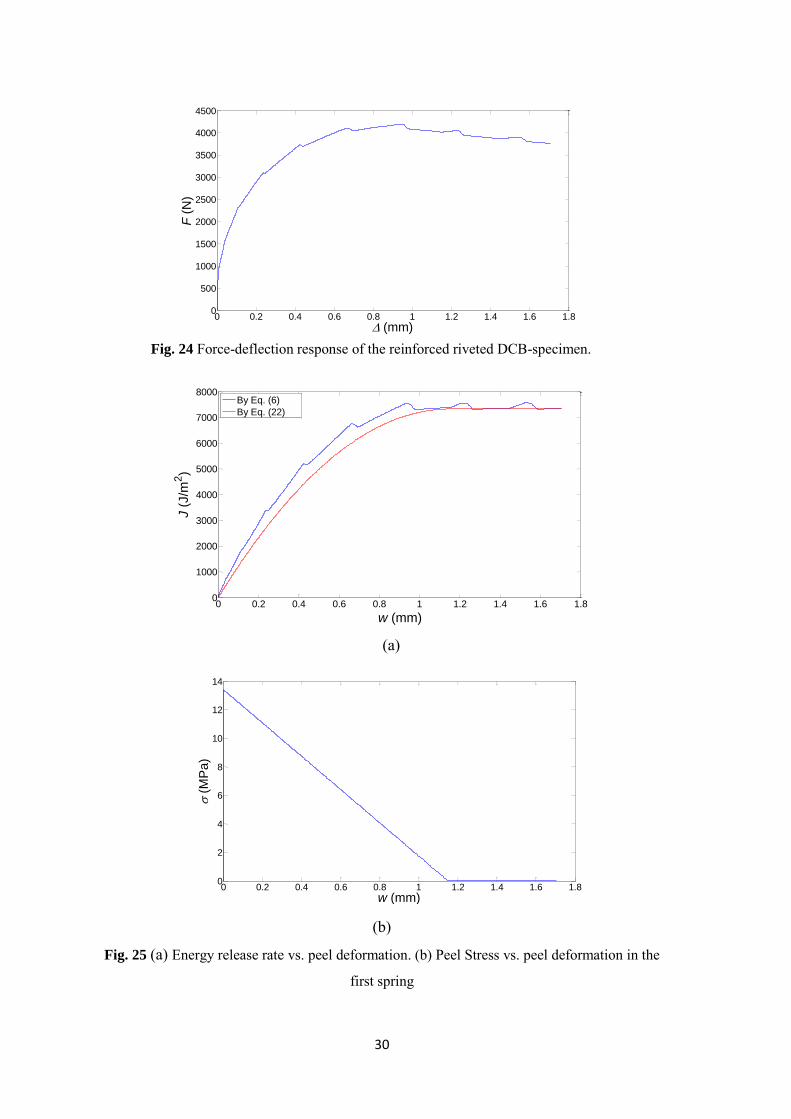
Figure 24 shows the force-deflection response of the reinforced riveted DCB-specimen.
The energy release rate vs. peel deformation and the stress-elongation response of the
first spring are shown in Fig. 25a and Fig. 25b, respectively. The curves in Fig. 25a are
derived by use of Eq. (6) and Eq. (22). Equation (22) originates from the concept of
cohesive modeling and Equation (6) is our derived formula which uses the force and
rotation angles at the loading points to define the energy release rate. Good agreement
between them is observed.
30
Fig. 24 Force-deflection response of the reinforced riveted DCB-specimen.
(a)
(b)
Fig. 25 (a) Energy release rate vs. peel deformation. (b) Peel Stress vs. peel deformation in the
first spring
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
500
1000
1500
2000
2500
3000
3500
4000
4500
(mm)
F (
N)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
1000
2000
3000
4000
5000
6000
7000
8000
w (mm)
J (
J/m
2)
By Eq. (6)
By Eq. (22)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
2
4
6
8
10
12
14
w (mm)
(
MP
a)
31
Figure 26 illustrates the stress distribution in a reinforced riveted DCB-specimen. Both
active and deactivated springs are seen in this figure.
Fig. 26 Stress distribution (in MPa) of the riveted DCB-specimen
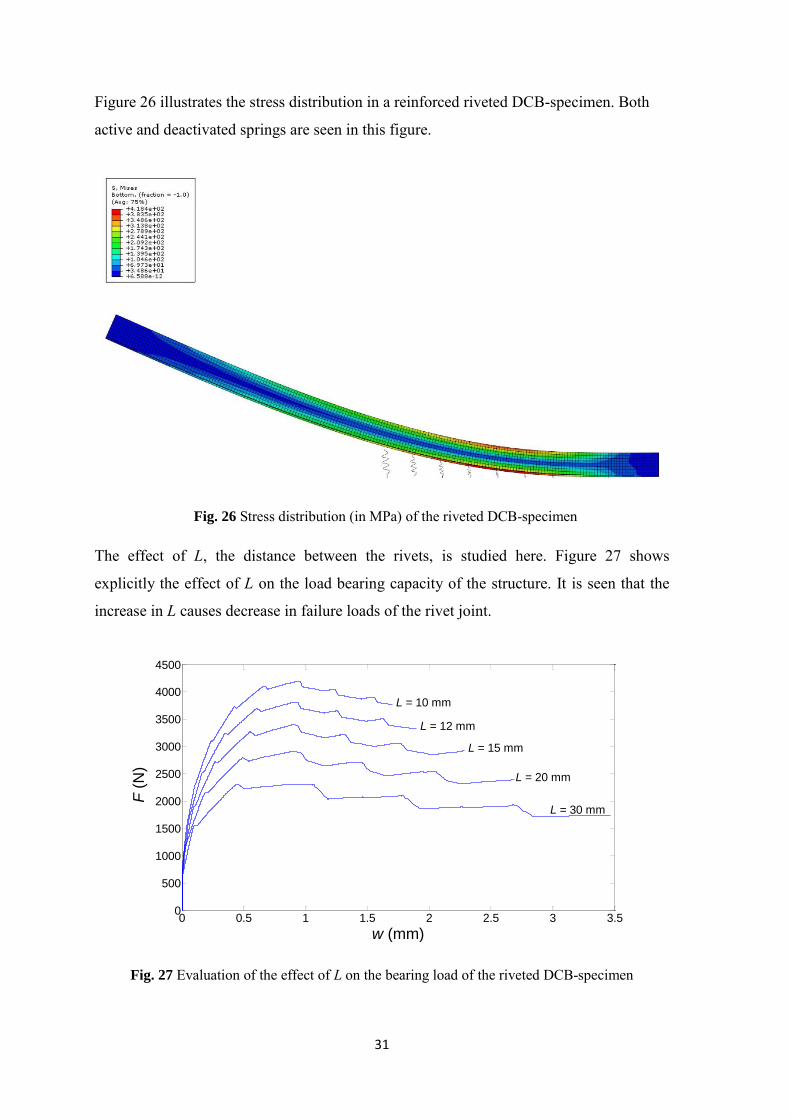
The effect of L, the distance between the rivets, is studied here. Figure 27 shows
explicitly the effect of L on the load bearing capacity of the structure. It is seen that the
increase in L causes decrease in failure loads of the rivet joint.
Fig. 27 Evaluation of the effect of L on the bearing load of the riveted DCB-specimen
0 0.5 1 1.5 2 2.5 3 3.50
500
1000
1500
2000
2500
3000
3500
4000
4500
L = 10 mm
L = 12 mm
L = 15 mm
L = 20 mm
L = 30 mm
w (mm)
F (
N)
32
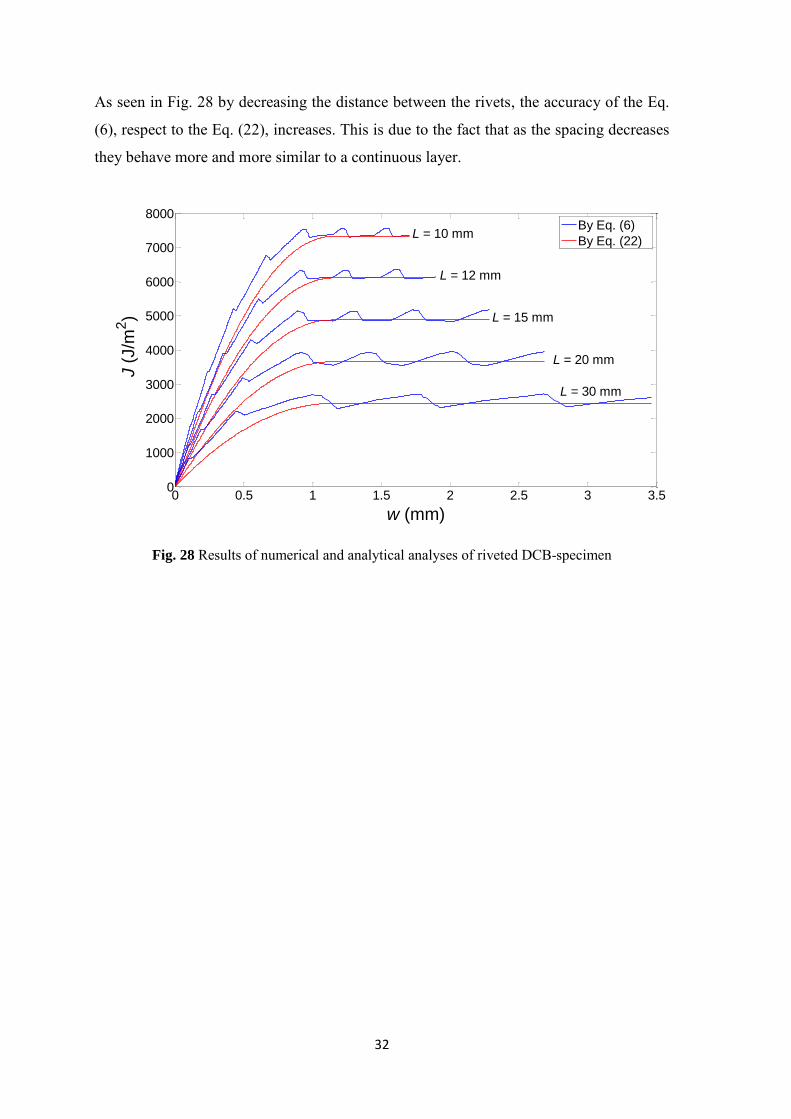
As seen in Fig. 28 by decreasing the distance between the rivets, the accuracy of the Eq.
(6), respect to the Eq. (22), increases. This is due to the fact that as the spacing decreases
they behave more and more similar to a continuous layer.
Fig. 28 Results of numerical and analytical analyses of riveted DCB-specimen
0 0.5 1 1.5 2 2.5 3 3.50
1000
2000
3000
4000
5000
6000
7000
8000
L = 10 mm
w (mm)
J (
J/m
2)
L = 12 mm
L = 15 mm
L = 20 mm
L = 30 mm
By Eq. (6)
By Eq. (22)
33
2.3 Cohesive zone modeling
2.3.1 Introduction
As discussed above, the concept of cohesive zone was proposed independently by
Barenblatt (1959, 1962) and Dugdale (1960) to describe damage under static loads at the
process zone ahead of the crack tip. Cohesive zone models were largely developed to
simulate crack initiation and propagation in cohesive and interfacial failure problems.
They are often modeled using nonlinear spring (e.g. Cui and Wisnom, 1993) or cohesive
finite elements (e.g. Mi et al., 1998). The concept of cohesive modeling is based on the
assumption that one or multiple fracture regions can be artificially introduced in
structures, in which damage growth is allowed by the introduction of a possible
discontinuity in the displacement field. The technique consists of the establishment of
traction–separation laws (addressed here as cohesive laws) to model interfaces or finite
regions. The cohesive laws are established between paired nodes of cohesive elements,
and they can be used to connect superimposed nodes of elements representing different
materials or different plies in composites, to simulate a zero thickness interface, or they
can be applied directly between two non-contacting materials to simulate a strip of finite
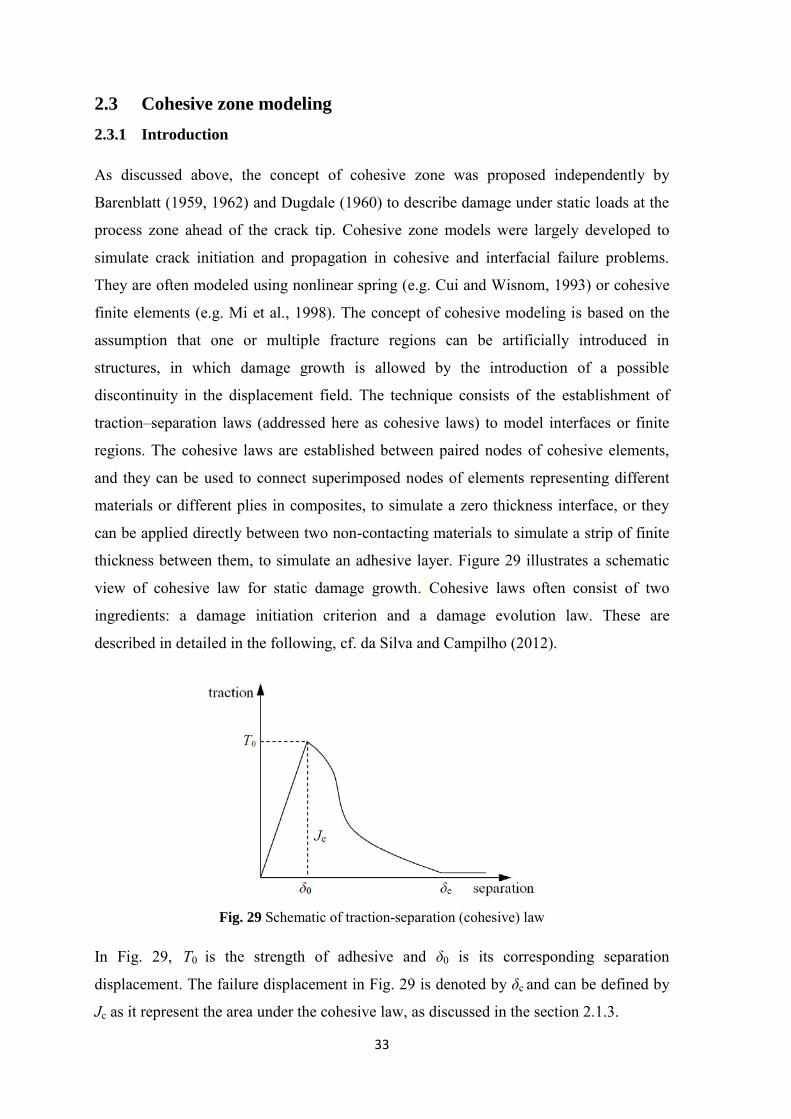
thickness between them, to simulate an adhesive layer. Figure 29 illustrates a schematic
view of cohesive law for static damage growth. Cohesive laws often consist of two
ingredients: a damage initiation criterion and a damage evolution law. These are
described in detailed in the following, cf. da Silva and Campilho (2012).
Fig. 29 Schematic of traction-separation (cohesive) law
In Fig. 29, T0 is the strength of adhesive and δ0 is its corresponding separation
displacement. The failure displacement in Fig. 29 is denoted by δc and can be defined by
Jc as it represent the area under the cohesive law, as discussed in the section 2.1.3.
34
2.3.2 Cohesive Laws
A cohesive law describes the relationship between the cohesive traction and the
separation displacement across a pair of cohesive surfaces. The shape of the cohesive law
can be adjusted to fit to the behavior of the adhesive that is supposed to be simulated.
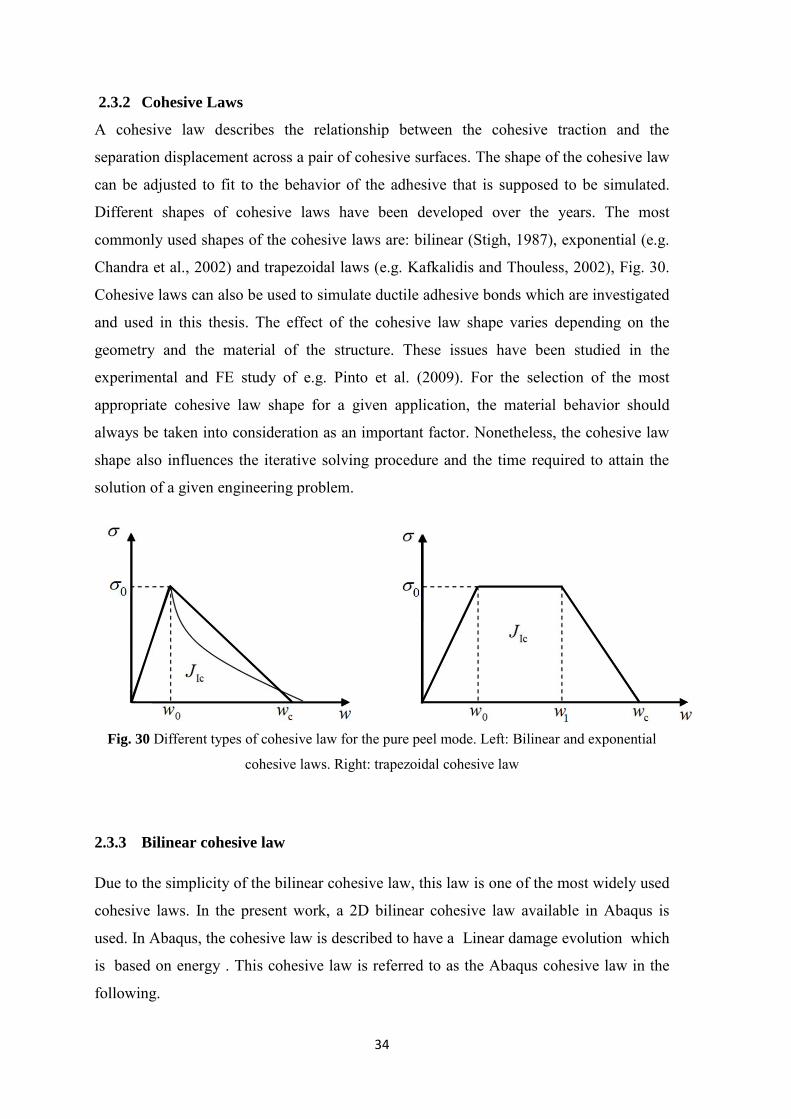
Different shapes of cohesive laws have been developed over the years. The most
commonly used shapes of the cohesive laws are: bilinear (Stigh, 1987), exponential (e.g.
Chandra et al., 2002) and trapezoidal laws (e.g. Kafkalidis and Thouless, 2002), Fig. 30.
Cohesive laws can also be used to simulate ductile adhesive bonds which are investigated
and used in this thesis. The effect of the cohesive law shape varies depending on the
geometry and the material of the structure. These issues have been studied in the
experimental and FE study of e.g. Pinto et al. (2009). For the selection of the most
appropriate cohesive law shape for a given application, the material behavior should
always be taken into consideration as an important factor. Nonetheless, the cohesive law
shape also influences the iterative solving procedure and the time required to attain the
solution of a given engineering problem.
Fig. 30 Different types of cohesive law for the pure peel mode. Left: Bilinear and exponential
cohesive laws. Right: trapezoidal cohesive law
2.3.3 Bilinear cohesive law
Due to the simplicity of the bilinear cohesive law, this law is one of the most widely used
cohesive laws. In the present work, a 2D bilinear cohesive law available in Abaqus is
used. In Abaqus, the cohesive law is described to have a Linear damage evolution which
is based on energy . This cohesive law is referred to as the Abaqus cohesive law in the
following.
35
In order to simplify the mathematical description, the total separation displacement, ,
and the direction variable, , are introduced as
2 2w v (23) 2
2 2
vw v
(24)
where w and v are the peel are shear deformations, respectively, cf. Fig. 6. For simplicity,
only non-negative v and w are considered in the following. Thus, the peel and shear
deformation can be expressed as
v , 1w (25)
For a deformation path with a fixed ratio v/w, i.e. with constant , the Abaqus cohesive
law displays bilinear response in terms of σ(w) and τ(v), cf. Fig. 31. For this type of
loading, the Abaqus cohesive law resembles the one presented by Camanho and Davila
(2002) but with different initial stiffnesses in peel and shear. The description of the
cohesive law provided in Abaqus’ manual is very brief, if not incomplete. Therefore, a
rather detailed description is given here as a generalization of the cohesive law given in
Camanho and Davila (2002). For a deformation path with constant , the described
cohesive law gives an identical response as the Abaqus cohesive law. However, for a
general loading path, the cohesive law described here differs from the cohesive law used
in Abaqus.
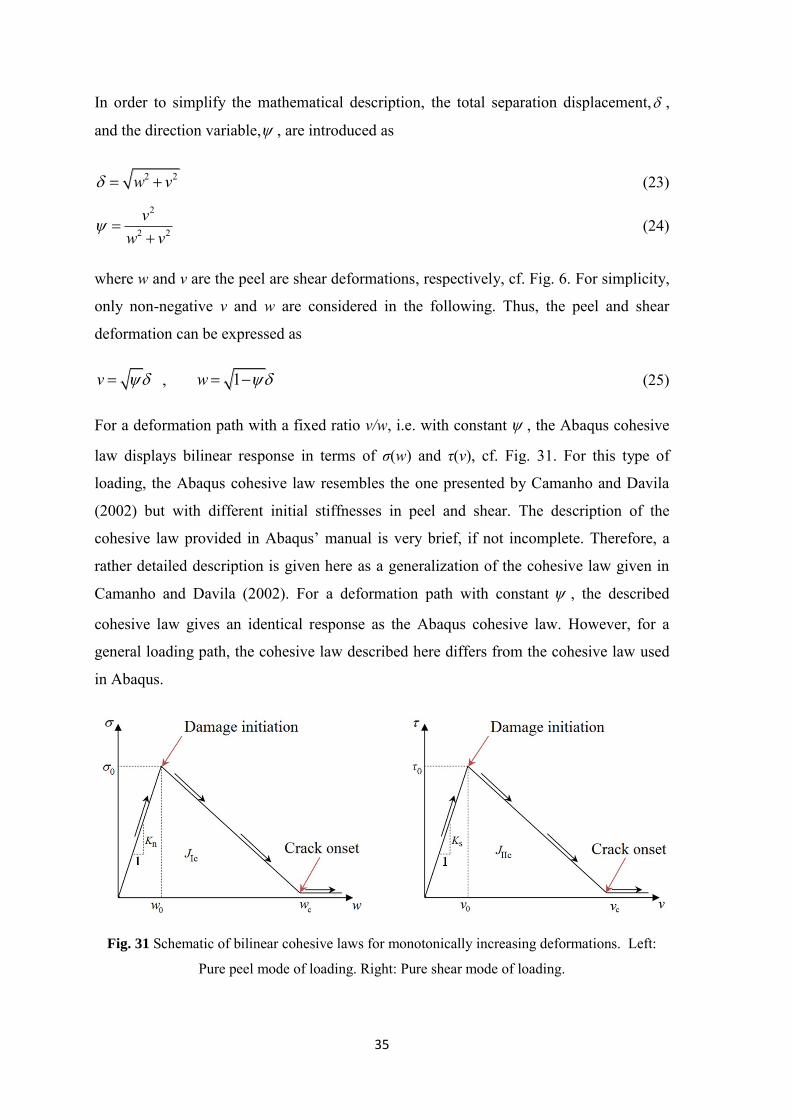
Fig. 31 Schematic of bilinear cohesive laws for monotonically increasing deformations. Left:
Pure peel mode of loading. Right: Pure shear mode of loading.

36
In Fig. 31, σ0 is the cohesive strength in the peel direction, w0 is the peel separation when
damage initiates, and wc is the peel displacement when decohesion occurs.
Correspondingly, τ0 is the cohesive strength in the shear direction, v0 is the shear
displacement when damage initiates and vc is the shear displacement when decohesion
occurs. The initial slopes of the cohesive laws in peel and shear are denoted by Kn and Ks,
respectively. With a monotonically increasing peel deformation, w, the traction-
separation relation for pure peel mode loading is defined by,
0
0
0c
c 0
( )
0
ww
w ww w
0
0
0
c
c
w w
w w w
w w
(26)
The traction separation response in shear (τ-v) takes the same form as Eq. (26), with the
notation changed from σ, w to τ, v, respectively.
2.3.3.1 Linear elastic response
The initial response of the cohesive law is assumed to be linear. It is defined by a
constitutive matrix relating the current stresses and separation in peel and shear across the
cohesive elements (subscripts n and s, respectively). The elastic behavior is given by,
ncoh
s
00
K wK v
T K δ
(27)
where T is the traction vector and δ is the separation vector. The matrix Kcoh contains the
stiffness parameters of the adhesive bond and its diagonal elements are related to the
material stiffnesses as,
an
EKt
, as
GKt
(28)
where aE is the effective modulus and Ga is the shear modulus of the adhesive. The use
of an effective modulus is based on the fact that polymer adhesives are much less stiff
than metallic adherents.

37
For thin adhesive layers, a suitable approximation is to set the in-plane strain to zero, cf.
Klarbring (1991). In this way, the out-of-plane stiffness appears in the following form,
a aa
a a
(1 )(1 2 )(1 )
E vEv v
(29)
where Ea and va are the elastic modulus and the Poisson’s ratio of the adhesive,
respectively. For thick adhesive layers the constraint is less severe, which means that E
may give a too high stiffness. In chapter 3 the initial stiffnesses, Kn and Ks, are
determined experimentally. Thus, Eq. (28) is not used to obtain the initial stiffnesses.
2.3.3.2 Damage initiation criterion
Damage initiation refers to the beginning of the degradation of the response of the
adhesive. The process of degradation begins when the stresses or strains satisfy a certain
damage initiation criterion.
Under pure mode I, and pure mode II loading, the onset of damage can be determined
simply by comparing the traction components with their respective critical values.
Under mixed-mode loading, the damage onset and the corresponding softening behavior
may occur before any of the traction components involved reach their respective critical
values in pure modes loading. The quadratic nominal stress criterion for the initiation of
damage is used for mixed mode loading in this work. This criterion is given by
2 2
0 0
1
(30)
where the Macaulay bracket emphasizes that a purely compressive stress state does not
initiate damage. After the fulfillment of Eq. (30), the softening process of the material
stiffness starts. The initiation criterion in Eq. (30) means that damage initiation takes
place when the total separation, , exceeds
0 00 2 2 2
0 0 0( )v w
v w v
(31)

38
where w0 and v0 are the peel and shear deformations corresponding to the onset of
softening in pure peel and shear modes of loading, respectively, cf. Fig. 31. Since 0
depends on , the initiation of damage is dependent of the loading direction.
2.3.3.3 Damage evolution
The damage evolution describes the rate at which the material stiffness is degraded once
the corresponding damage initiation criterion is reached, cf. Eq. (30).
Numerically, this is implemented by a scalar damage parameter, d, whose values vary
from zero (undamaged) to unity (complete loss of stiffness) as the material deteriorates.
ncoh
s
0(1- ) (1- )
0K w
d dK v
T K δ (32)
where T, Kcoh and δ are defined as in Eq. (27).
In mixed mode loading, the cohesive law displays bilinear forms of σ(w) and (v) if the
deformation takes place under constant . The cohesive law is formulated in terms of the
total separation, . For deformation under constant , we may introduce a scalar stress, T,
which is conjugated to . To this end, form
d d d ( 1 )dw v T δ
Hence,
1T (33)
Inserting and from Eq. (32) into Eq. (33) yields,
coh(1- )T d K (34)
where
coh n(1 ) sK K K
(35)
Figure 32 illustrates a bilinear form of T( ) for monotonically increasing deformation
under constant in mixed mode loading.

39
T Damage initiation (d =0)
Tmax Linear softening
Kcoh Crack onset (d =1)
(1-d)Kcoh Jc
0 max c Fig. 32 Triangular cohesive laws in mixed mode, linear softening
Elastic unloading from a damaged state is also indicated in Fig. 31. An explicit
expression for the damage variable, d, can be derived. From Fig.32, we have:
coh max max(1- )d K T , where max is the maximum mixed mode separation displacement
attained during the loading history. The damage parameter can now be expressed in terms
of entities in Fig. 32 as,
c max 0
max c 0
( )( )
d
(36)
where 0 is the mixed mode separation displacement corresponding to the onset of
softening and is defined by Eq. (31). To complete the description of the cohesive law, the
variation of the critical deformation, c , with must be defined. An energy based
definition of c is described below.
In the present work, the power low fracture criterion is used. The power law criterion
states that the failure under mixed mode loading is governed by a power law interaction
equation of the energies required to cause failure in the individual modes, cf. Abaqus-
documentation (2011). It is given by
c cI II
Ic IIc
1J JJ J
(37)
in which JIc and JIIc are the critical energy release rate in the pure peel and shear modes of
loading, respectively.
40
In Eq. (37), cIJ and c
IIJ refer to energy release rates in normal and shear direction,
corresponding to the fracture onset under mixed mode loading, that satisfy Eq. (37). The
critical mixed-mode energy release rate is Jc= cIJ + c
IIJ .
Equation (37) can be reformulated in the following form
1c cI c II c
cIc IIc
/ /J J J JJJ J
(38)
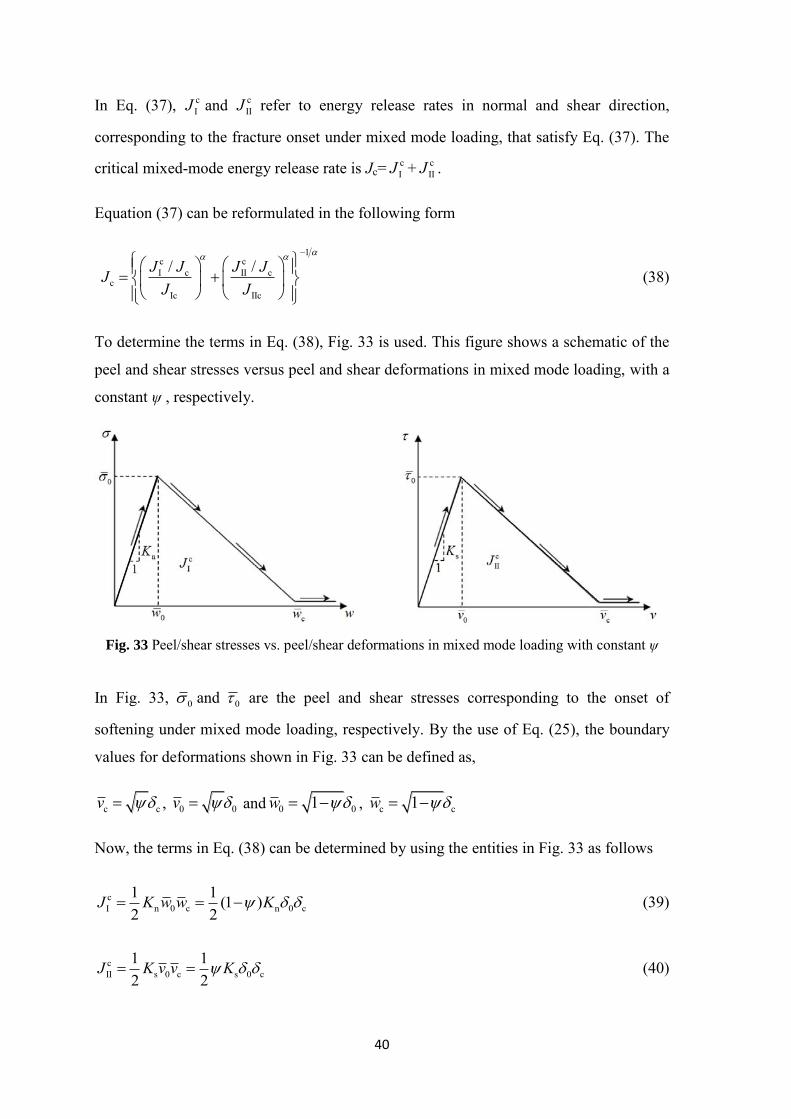
To determine the terms in Eq. (38), Fig. 33 is used. This figure shows a schematic of the
peel and shear stresses versus peel and shear deformations in mixed mode loading, with a
constant ψ , respectively.
Fig. 33 Peel/shear stresses vs. peel/shear deformations in mixed mode loading with constant ψ
In Fig. 33, 0 and 0 are the peel and shear stresses corresponding to the onset of
softening under mixed mode loading, respectively. By the use of Eq. (25), the boundary
values for deformations shown in Fig. 33 can be defined as,
c cv , 0 0v and 0 01w , c c1w
Now, the terms in Eq. (38) can be determined by using the entities in Fig. 33 as follows
cI n 0 c n 0 c
1 1 (1 )2 2
J K w w K
(39)
cII s 0 c s 0 c
1 12 2
J K v v K
(40)
41
On the other hand, for the bilinear form of T( ), Jc can also be defined as the area under
the curve shown in Fig. 32. That is equal to
c coh 0 c12
J K (41)
This result can also be obtained by adding the peel and shear fracture energies in Eqs.
(39) and (40) and use of Eq. (35). Inserting Eqs. (39), (40) and (41) into Eq. (38) gives
the final expression for the critical energy release rate as a function of loading direction,
,
1
s nc
coh IIc coh Ic
(1 )K KJK J K J
(42)
Putting equal Eqs. (41) and (42) yields the wanted expression for the critical separation
displacement in mixed mode loading as a function of loading direction variable, ,
1
s nc
coh 0 coh IIc coh Ic
(1 )2 K KK K J K J
(43)
where 0 is the mixed mode separation displacement corresponding to the onset of
softening, cf. Eq. (31) and Kcoh is the initial stiffness in mixed mode loading, cf. Eq. (35).
By introducing
s
n
K vK w
Eq. (43) can be reformulated in the following form.
12 2
ccoh 0 IIc Ic
2(1 ) 1K J J
(44)
For Kn=Ks, Eq. (44) takes the form of the corresponding equation in Camanho and Davila
(2002).
42
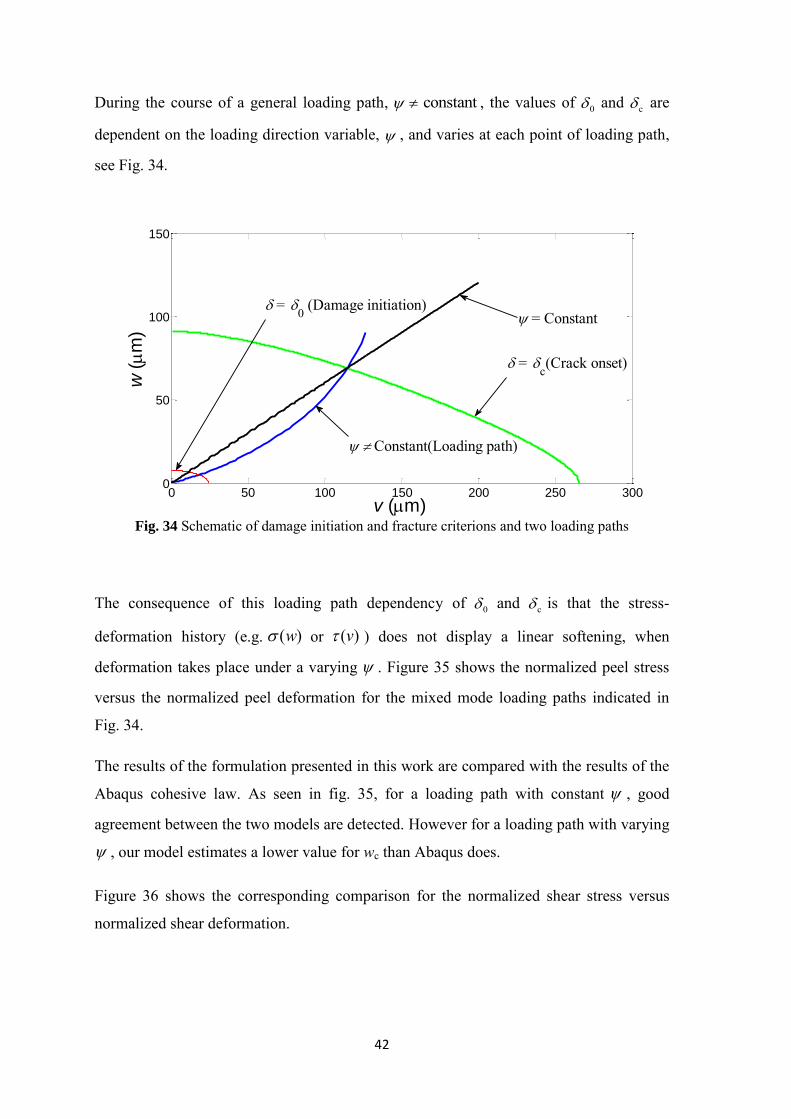
During the course of a general loading path, constant , the values of 0 and c are
dependent on the loading direction variable, , and varies at each point of loading path,
see Fig. 34.
Fig. 34 Schematic of damage initiation and fracture criterions and two loading paths
The consequence of this loading path dependency of 0 and c is that the stress-
deformation history (e.g. ( )w or ( )v ) does not display a linear softening, when
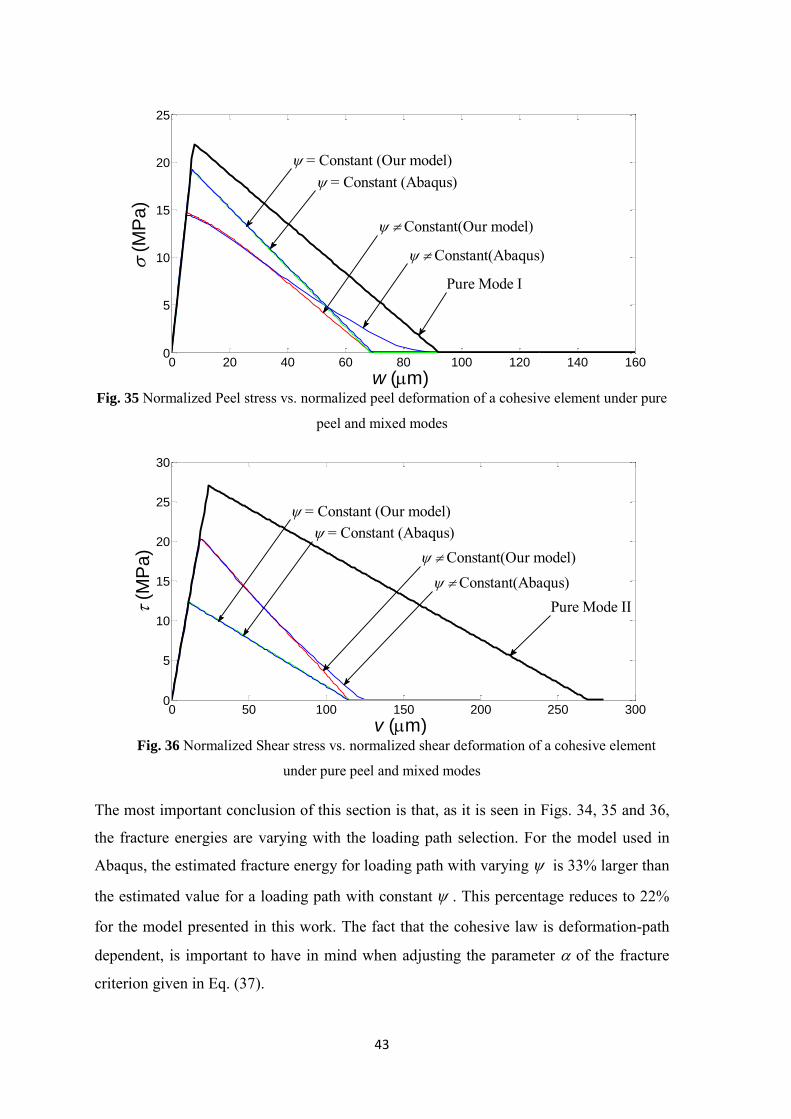
deformation takes place under a varying . Figure 35 shows the normalized peel stress
versus the normalized peel deformation for the mixed mode loading paths indicated in
Fig. 34.
The results of the formulation presented in this work are compared with the results of the
Abaqus cohesive law. As seen in fig. 35, for a loading path with constant , good
agreement between the two models are detected. However for a loading path with varying
, our model estimates a lower value for wc than Abaqus does.
Figure 36 shows the corresponding comparison for the normalized shear stress versus
normalized shear deformation.
0 50 100 150 200 250 3000
50
100
150
v (m)
w (m
)
= c(Crack onset)
Constant(Loading path)
= Constant = 0 (Damage initiation)
43
Fig. 35 Normalized Peel stress vs. normalized peel deformation of a cohesive element under pure
peel and mixed modes
Fig. 36 Normalized Shear stress vs. normalized shear deformation of a cohesive element
under pure peel and mixed modes
The most important conclusion of this section is that, as it is seen in Figs. 34, 35 and 36,
the fracture energies are varying with the loading path selection. For the model used in
Abaqus, the estimated fracture energy for loading path with varying is 33% larger than
the estimated value for a loading path with constant . This percentage reduces to 22%
for the model presented in this work. The fact that the cohesive law is deformation-path
dependent, is important to have in mind when adjusting the parameter of the fracture
criterion given in Eq. (37).
0 20 40 60 80 100 120 140 1600
5
10
15
20
25
w (m)
(
MP
a)
= Constant (Our model)
Constant(Abaqus)
Constant(Our model)
Pure Mode I
= Constant (Abaqus)
0 50 100 150 200 250 3000
5
10
15
20
25
30
(M
Pa)
v (m)
= Constant (Our model) = Constant (Abaqus)
Constant(Abaqus) Constant(Our model)
Pure Mode II

44
3 Experiments
In this chapter, DCB- and ENF-tests are evaluated and used to obtain the cohesive laws’
parameters for modes I and II of loading for an adhesive layer. These parameters along
with the results of the MCB-tests are used in the next chapter to find the best estimation
of α, the power coefficient in the damage evolution criterion in Eq. (37). Subsequently by
use of all the obtained parameters, the TRB-tests are simulated and the results are verified
with the experimental results of TRB-tests, carried out in the last part of this chapter. The
four setups of specimens used in this work are summarized in Table 1. The material
properties of the specimens are given in Table 2. The adhesive used in this work is an
epoxy considered for reinforcing of bridges, cf. Tab. 2.
Table 1. Specimen type, number and the objective of study
Type of Specimen No. of
Specimen
Objective
DCB
3
Determination
of cohesive law
ENF
3 Determination of
cohesive law
MCB
6 Determination
of α
TRB
16 P–Δ curves
45
Table 2. Material properties of specimens
Material E (GPa) σy (MPa)
Adhesivea 7b 0.3 20
Steel (Rigor) 196c 0.29 500
Aluminum 63c 0.31 276 a Sto BPE Lim567 b Information provided by the manufacturer c Information provided by the experiments
3.1 DCB-experiments
Experiments have been carried out using a set of DCB-specimens to determine the
cohesive laws’ parameters for mode I of loading, cf. André et al. (2012). These results are
repeated here for completeness. The geometry of the specimens is given in Fig. 10. The
dimensions are: h = 6.6 mm, t = 2.4 mm, a = 80 mm, b = 8.3 mm and l = 200 mm.
3.1.1 Set-up for DCB-tests
The tensile test machine is shown in Fig. 37. The measurement system consists of a force
transducer, a shaft encoder and two linear variable displacement transducers (LVDT).
The shaft encoder is used to measure the rotation, θ, at the loading point and the LVDT’s
are used to measure the deformation of the adhesive layer at the crack tip, w, as the
relative displacement at the outsides of the two adherents. For more details about the
testing machine and method see Andersson and Biel (2006).
Fig. 37 Experimental setup for DCB-experiment (Andersson and Biel, 2006)
46
3.1.2 Experimental results
Experimentally measured histories of P, w, θ with Eq. (6) yield the J-w curves for the
experiments. From the experimental curve, σ(w) is obtained by differentiation, cf. Eq. (7).
This differentiation of experimental data J(w) causes a substantial scatter. In order to
minimize numerical scatter, the J(w) curves are first approximated using a least square
procedure, with a Prony-series with twenty terms. Then the differentiation with respect to
w is taken, as explained in section 2.1.3. It is assumed that crack propagation starts at the
maximum value of the energy release rate Jc. The critical peel deformation wc is taken at
the same point. One constraint is introduced in the least square approximation of J(w) in
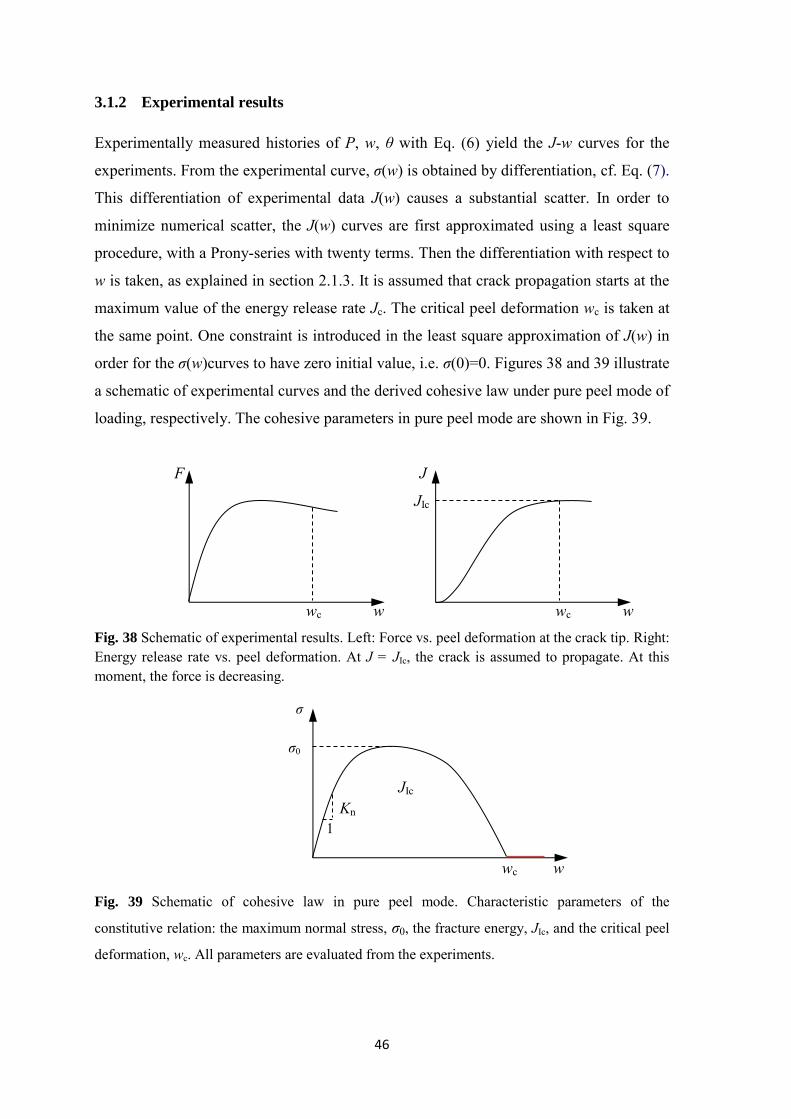
order for the σ(w)curves to have zero initial value, i.e. σ(0)=0. Figures 38 and 39 illustrate
a schematic of experimental curves and the derived cohesive law under pure peel mode of
loading, respectively. The cohesive parameters in pure peel mode are shown in Fig. 39.
F J
JIc
wc w wc w
Fig. 38 Schematic of experimental results. Left: Force vs. peel deformation at the crack tip. Right: Energy release rate vs. peel deformation. At J = JIc, the crack is assumed to propagate. At this moment, the force is decreasing.
σ σ0
JIc Kn 1 wc w
Fig. 39 Schematic of cohesive law in pure peel mode. Characteristic parameters of the
constitutive relation: the maximum normal stress, σ0, the fracture energy, JIc, and the critical peel
deformation, wc. All parameters are evaluated from the experiments.
47
The parameters that are evaluated from the experiments are the maximum peel stress, σ0,
the fracture energy, JIc, the critical peel deformation, wc, and the initial elastic stiffness,
Kn. These parameters characterize the constitutive relation as shown in Figs. 38 and 39.
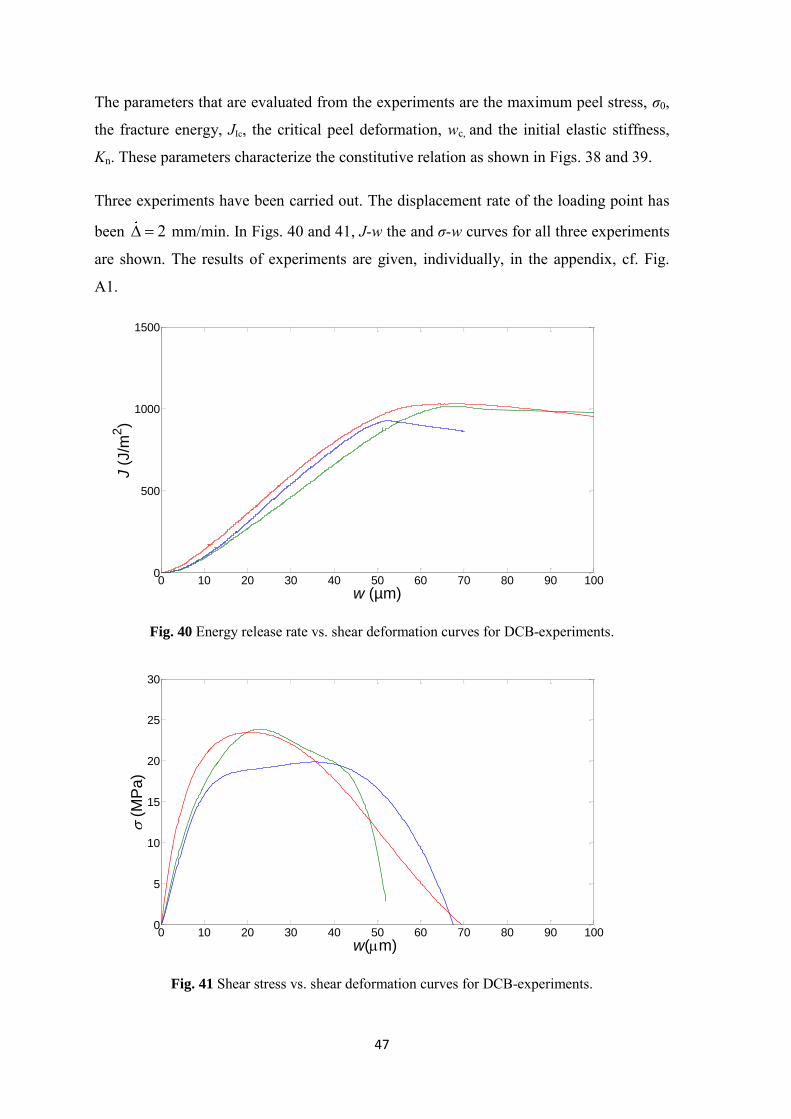
Three experiments have been carried out. The displacement rate of the loading point has
been 2 mm/min. In Figs. 40 and 41, J-w the and σ-w curves for all three experiments
are shown. The results of experiments are given, individually, in the appendix, cf. Fig.
A1.
Fig. 40 Energy release rate vs. shear deformation curves for DCB-experiments.
Fig. 41 Shear stress vs. shear deformation curves for DCB-experiments.
0 10 20 30 40 50 60 70 80 90 1000
500
1000
1500
w (µm)
J (
J/m
2)
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
w(m)
(
MP
a)
48
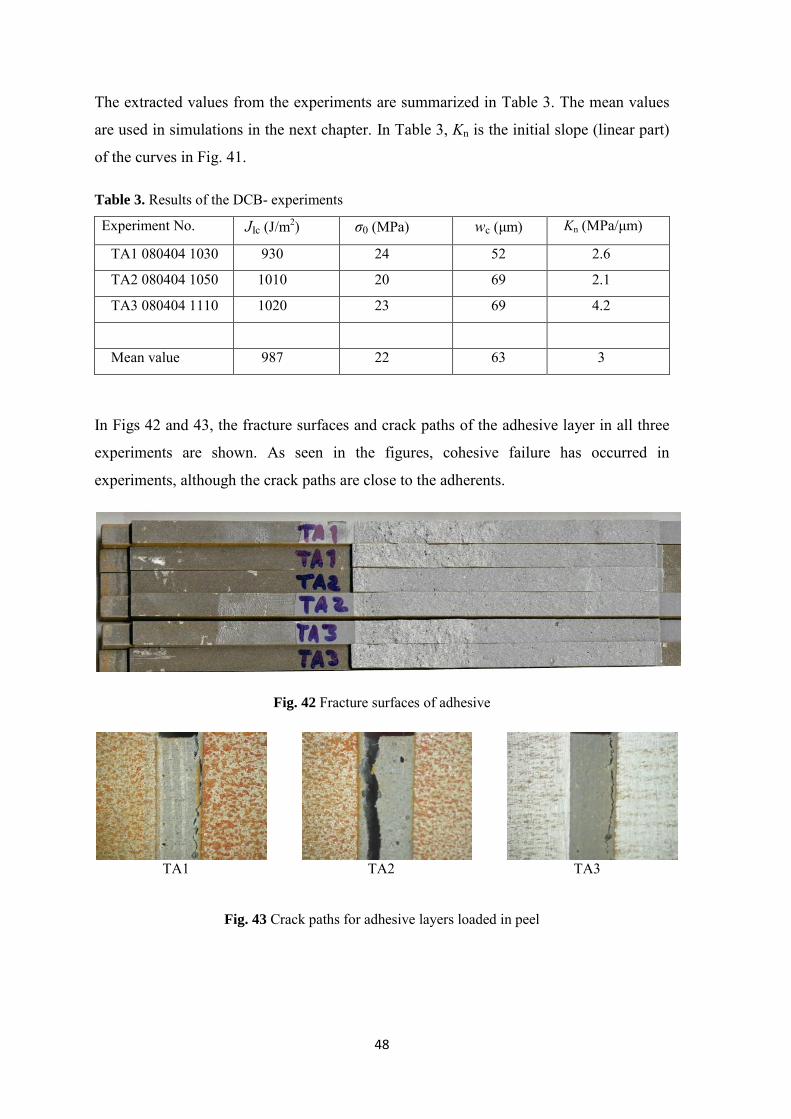
The extracted values from the experiments are summarized in Table 3. The mean values
are used in simulations in the next chapter. In Table 3, Kn is the initial slope (linear part)
of the curves in Fig. 41.
Table 3. Results of the DCB- experiments
Experiment No. JIc (J/m2) σ0 (MPa) wc (μm) Kn (MPa/μm)
TA1 080404 1030 930 24 52 2.6
TA2 080404 1050 1010 20 69 2.1
TA3 080404 1110 1020 23 69 4.2
Mean value 987 22 63 3
In Figs 42 and 43, the fracture surfaces and crack paths of the adhesive layer in all three
experiments are shown. As seen in the figures, cohesive failure has occurred in
experiments, although the crack paths are close to the adherents.
Fig. 42 Fracture surfaces of adhesive
TA1
TA2
TA3
Fig. 43 Crack paths for adhesive layers loaded in peel
49
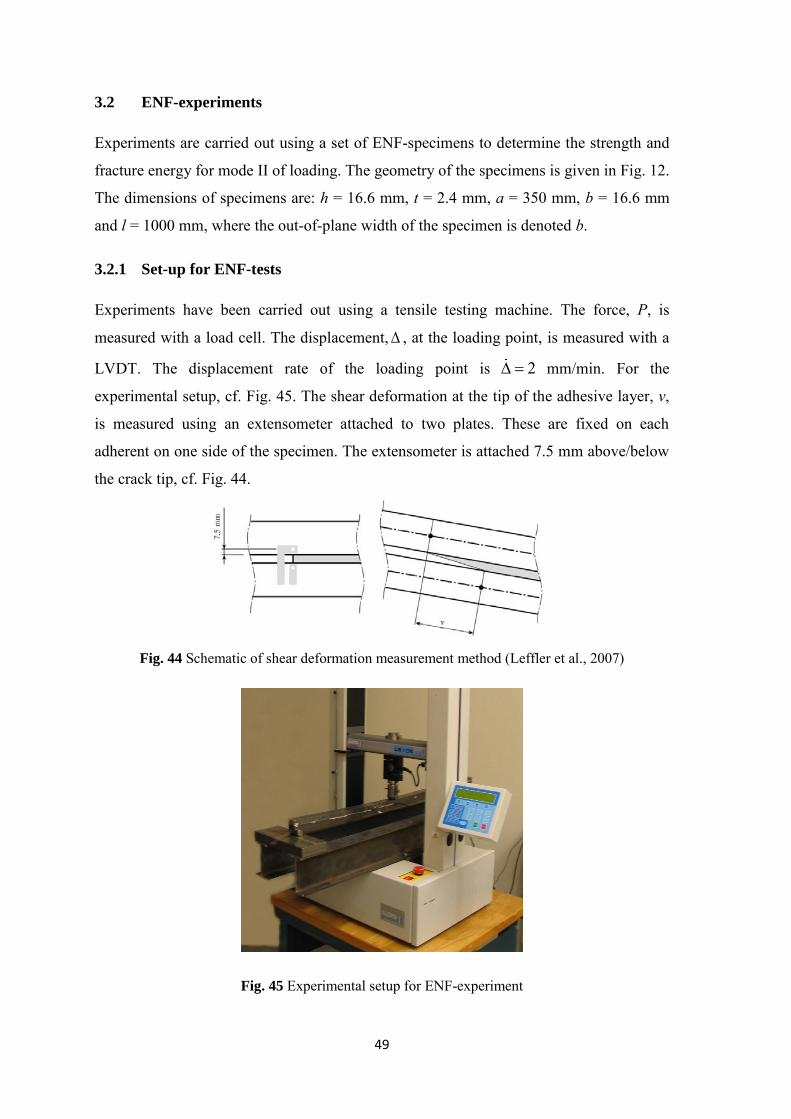
3.2 ENF-experiments
Experiments are carried out using a set of ENF-specimens to determine the strength and
fracture energy for mode II of loading. The geometry of the specimens is given in Fig. 12.
The dimensions of specimens are: h = 16.6 mm, t = 2.4 mm, a = 350 mm, b = 16.6 mm
and l = 1000 mm, where the out-of-plane width of the specimen is denoted b.
3.2.1 Set-up for ENF-tests
Experiments have been carried out using a tensile testing machine. The force, P, is
measured with a load cell. The displacement, , at the loading point, is measured with a
LVDT. The displacement rate of the loading point is 2 mm/min. For the
experimental setup, cf. Fig. 45. The shear deformation at the tip of the adhesive layer, v,
is measured using an extensometer attached to two plates. These are fixed on each
adherent on one side of the specimen. The extensometer is attached 7.5 mm above/below
the crack tip, cf. Fig. 44.
Fig. 44 Schematic of shear deformation measurement method (Leffler et al., 2007)
Fig. 45 Experimental setup for ENF-experiment
50
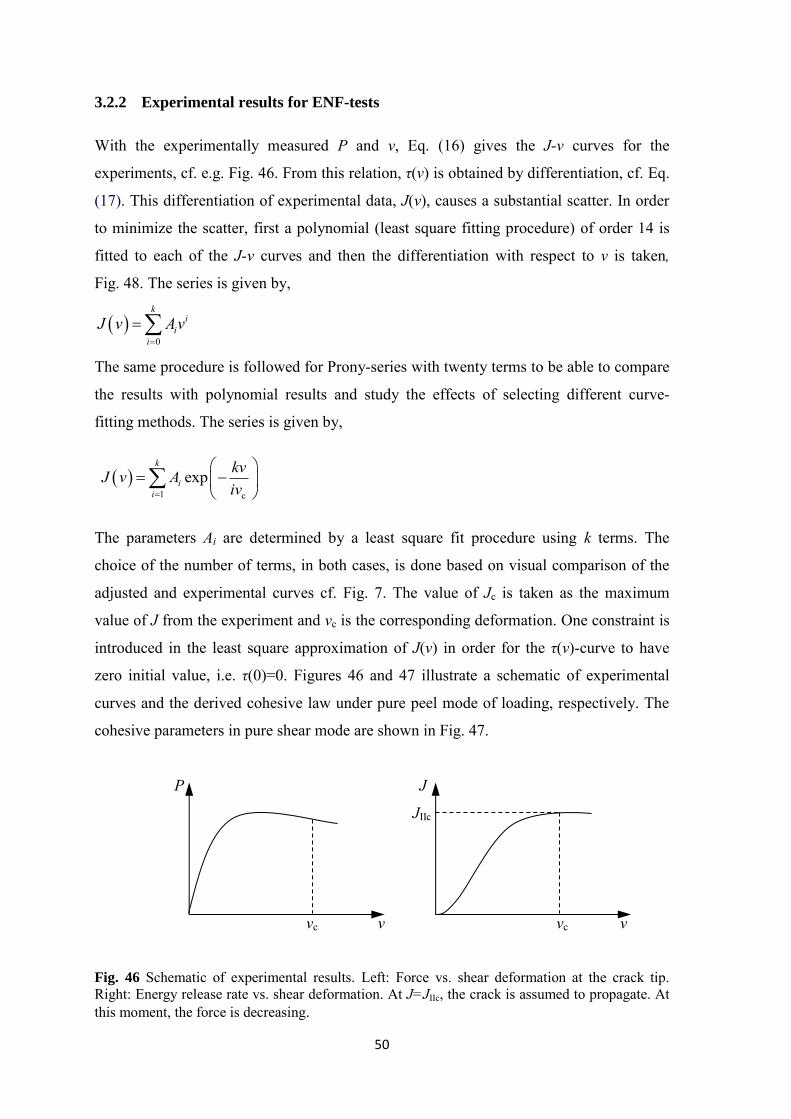
3.2.2 Experimental results for ENF-tests
With the experimentally measured P and v, Eq. (16) gives the J-v curves for the
experiments, cf. e.g. Fig. 46. From this relation, τ(v) is obtained by differentiation, cf. Eq.
(17). This differentiation of experimental data, J(v), causes a substantial scatter. In order
to minimize the scatter, first a polynomial (least square fitting procedure) of order 14 is
fitted to each of the J-v curves and then the differentiation with respect to v is taken,
Fig. 48. The series is given by,
0
ki
ii
J v Av
The same procedure is followed for Prony-series with twenty terms to be able to compare
the results with polynomial results and study the effects of selecting different curve-
fitting methods. The series is given by,
1 c
expk
ii
kvJ v Aiv
The parameters Ai are determined by a least square fit procedure using k terms. The
choice of the number of terms, in both cases, is done based on visual comparison of the
adjusted and experimental curves cf. Fig. 7. The value of Jc is taken as the maximum
value of J from the experiment and vc is the corresponding deformation. One constraint is
introduced in the least square approximation of J(v) in order for the τ(v)-curve to have
zero initial value, i.e. τ(0)=0. Figures 46 and 47 illustrate a schematic of experimental
curves and the derived cohesive law under pure peel mode of loading, respectively. The
cohesive parameters in pure shear mode are shown in Fig. 47.
P J
JIIc
vc v vc v
Fig. 46 Schematic of experimental results. Left: Force vs. shear deformation at the crack tip. Right: Energy release rate vs. shear deformation. At J=JIIc, the crack is assumed to propagate. At this moment, the force is decreasing.

51
τ τ0
JIIc Ks 1 vc v
Fig. 47 Schematic of cohesive law in pure shear mode. Characteristic parameters of the constitutive relation: the maximum shear stress, τ0, the fracture energy, JIIc, and the critical shear deformation, vc. All parameters are evaluated from the experiments. The parameters that are extracted from the experiments are the maximum shear stress, τ0,
the fracture energy, JIIc, and the critical shear deformation, vc. These parameters
characterize the constitutive relation shown in Figs. 46 and 47.
Three experiments have been carried out. In Fig. 48, the J-v curves for all three
experiments fitted with the Prony series curves are shown and subsequently the τ-v curves
are derived and shown in Fig. 49. The results of experiments are given, individually, in
the appendix, cf. Fig. A2.
Fig. 48 Experimental results and fitted Prony series curves for ENF-experiments.
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
(m)
J (
J/m
2)
Experiment 1
Experiment 2Experiment 3
52
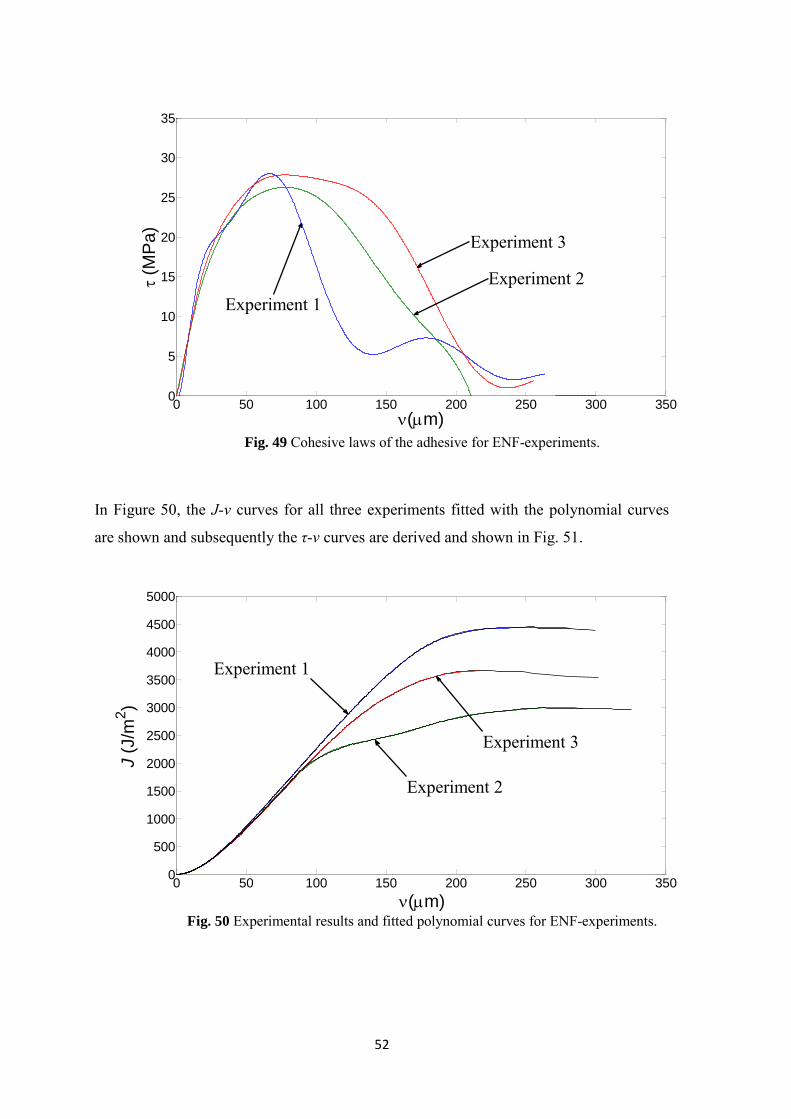
Fig. 49 Cohesive laws of the adhesive for ENF-experiments.
In Figure 50, the J-v curves for all three experiments fitted with the polynomial curves
are shown and subsequently the τ-v curves are derived and shown in Fig. 51.
Fig. 50 Experimental results and fitted polynomial curves for ENF-experiments.
0 50 100 150 200 250 300 3500
5
10
15
20
25
30
35
(m)
(M
Pa
)
Experiment 1Experiment 2
Experiment 3
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
(m)
J (
J/m
2)
Experiment 1
Experiment 2
Experiment 3
53
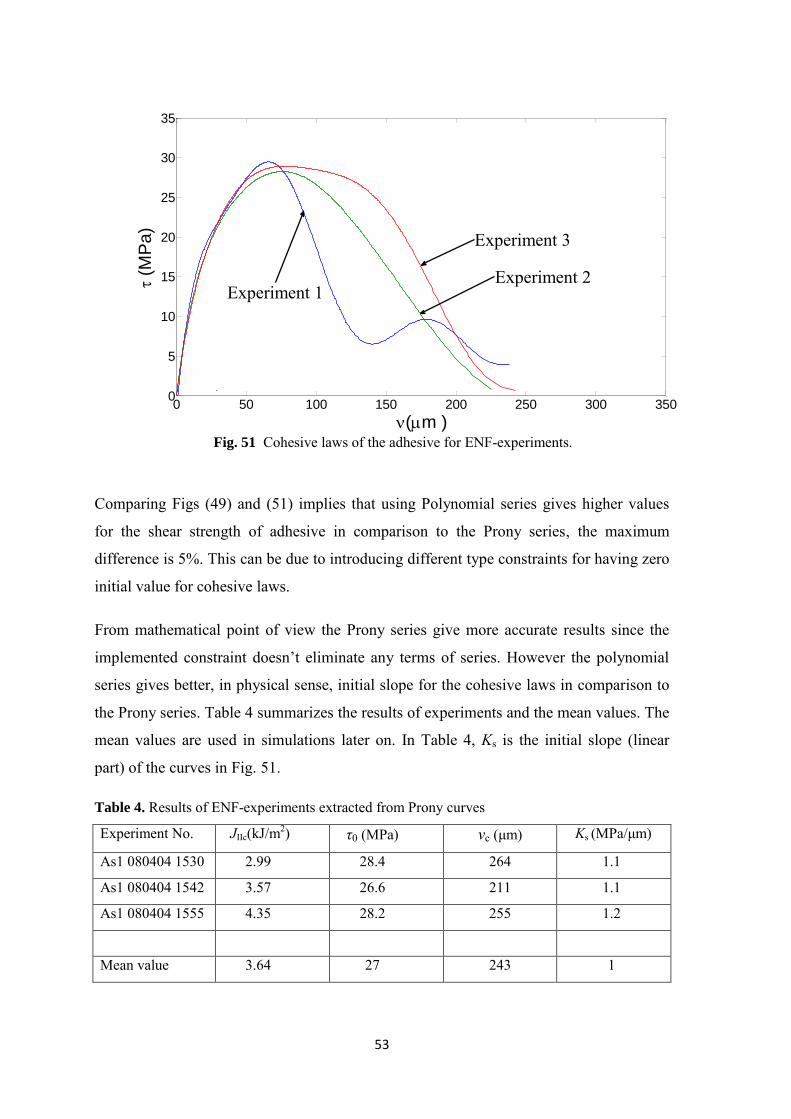
Fig. 51 Cohesive laws of the adhesive for ENF-experiments.
Comparing Figs (49) and (51) implies that using Polynomial series gives higher values
for the shear strength of adhesive in comparison to the Prony series, the maximum
difference is 5%. This can be due to introducing different type constraints for having zero
initial value for cohesive laws.
From mathematical point of view the Prony series give more accurate results since the
implemented constraint doesn’t eliminate any terms of series. However the polynomial
series gives better, in physical sense, initial slope for the cohesive laws in comparison to
the Prony series. Table 4 summarizes the results of experiments and the mean values. The
mean values are used in simulations later on. In Table 4, Ks is the initial slope (linear
part) of the curves in Fig. 51.
Table 4. Results of ENF-experiments extracted from Prony curves
Experiment No. JIIc(kJ/m2) τ0 (MPa) vc (μm) Ks (MPa/μm)
As1 080404 1530 2.99 28.4 264 1.1
As1 080404 1542 3.57 26.6 211 1.1
As1 080404 1555 4.35 28.2 255 1.2
Mean value 3.64 27 243 1
0 50 100 150 200 250 300 3500
5
10
15
20
25
30
35
(m )
(M
Pa
)
Experiment 1
Experiment 3
Experiment 2
54
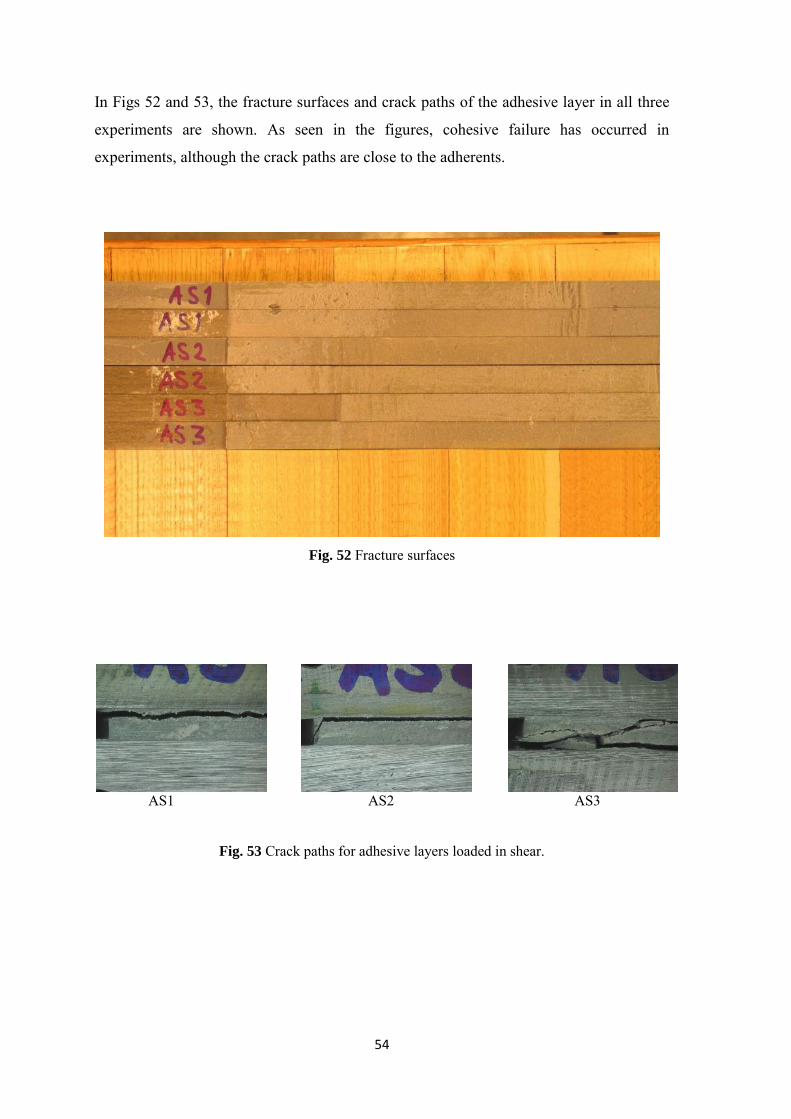
In Figs 52 and 53, the fracture surfaces and crack paths of the adhesive layer in all three
experiments are shown. As seen in the figures, cohesive failure has occurred in
experiments, although the crack paths are close to the adherents.
Fig. 52 Fracture surfaces
AS1
AS2
AS3
Fig. 53 Crack paths for adhesive layers loaded in shear.
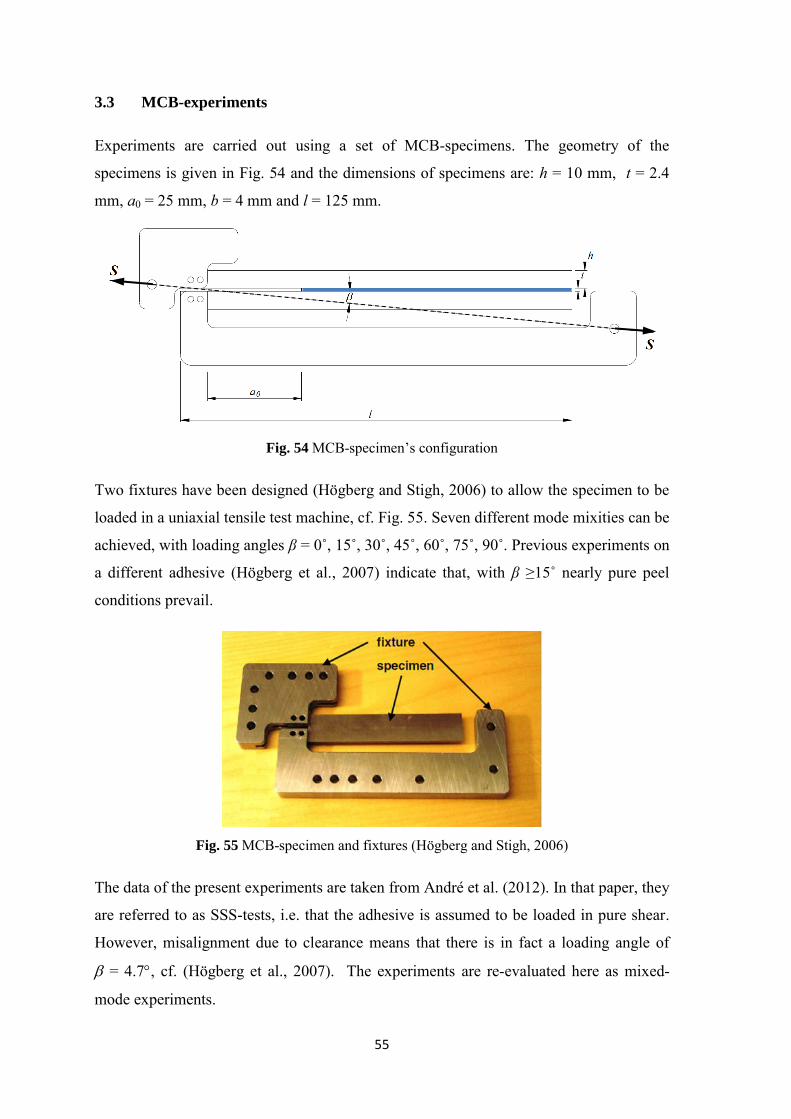
55
3.3 MCB-experiments
Experiments are carried out using a set of MCB-specimens. The geometry of the
specimens is given in Fig. 54 and the dimensions of specimens are: h = 10 mm, t = 2.4
mm, a0 = 25 mm, b = 4 mm and l = 125 mm.
Fig. 54 MCB-specimen’s configuration
Two fixtures have been designed (Högberg and Stigh, 2006) to allow the specimen to be
loaded in a uniaxial tensile test machine, cf. Fig. 55. Seven different mode mixities can be
achieved, with loading angles β = 0˚, 15˚, 30˚, 45˚, 60˚, 75˚, 90˚. Previous experiments on
a different adhesive (Högberg et al., 2007) indicate that, with β ≥15˚ nearly pure peel
conditions prevail.
Fig. 55 MCB-specimen and fixtures (Högberg and Stigh, 2006)
The data of the present experiments are taken from André et al. (2012). In that paper, they
are referred to as SSS-tests, i.e. that the adhesive is assumed to be loaded in pure shear.
However, misalignment due to clearance means that there is in fact a loading angle of
= 4.7, cf. (Högberg et al., 2007). The experiments are re-evaluated here as mixed-
mode experiments.
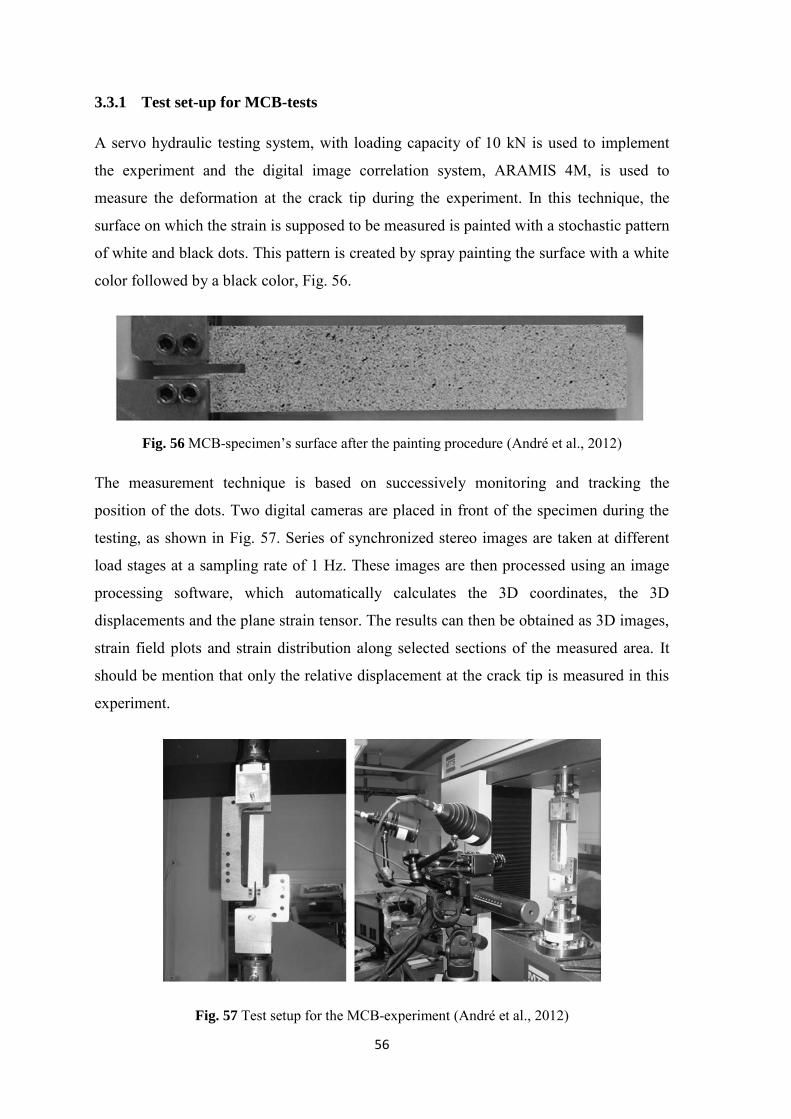
56
3.3.1 Test set-up for MCB-tests
A servo hydraulic testing system, with loading capacity of 10 kN is used to implement
the experiment and the digital image correlation system, ARAMIS 4M, is used to
measure the deformation at the crack tip during the experiment. In this technique, the
surface on which the strain is supposed to be measured is painted with a stochastic pattern
of white and black dots. This pattern is created by spray painting the surface with a white
color followed by a black color, Fig. 56.
Fig. 56 MCB-specimen’s surface after the painting procedure (André et al., 2012)
The measurement technique is based on successively monitoring and tracking the
position of the dots. Two digital cameras are placed in front of the specimen during the
testing, as shown in Fig. 57. Series of synchronized stereo images are taken at different
load stages at a sampling rate of 1 Hz. These images are then processed using an image
processing software, which automatically calculates the 3D coordinates, the 3D
displacements and the plane strain tensor. The results can then be obtained as 3D images,
strain field plots and strain distribution along selected sections of the measured area. It
should be mention that only the relative displacement at the crack tip is measured in this
experiment.
Fig. 57 Test setup for the MCB-experiment (André et al., 2012)

57
3.3.2 Experimental results for MCB-tests
The ARAMIS 4M system records the displacements in the crack tip area. The
displacements of four particular points at the crack tip, cf. Fig. 58, are extracted from the
system for determination of the rotation of the adherents and the shear and peel
deformation of the adhesive layer to be calculated, cf. Fig. 59. The positions are
measured in both x and y directions. The rotations of the adherents at the crack tip are
evaluated by
x,1 x,2u
1 2
u uy y
,
x,3 x,4l
3 4
u uy y
The shear deformation of the adhesive becomes:
x,2 x,3 m y,3 y,2v u u u u
and the peel deformation is given by
y,2 y,3 m x,3 x,2w u u u u
where u lm 2
is the mean value of the rotation angles of adherents, cf. Högberg
et al. (2007).
Fig. 58 Position of the points used to define the rotation angles of adherents

58
Fig. 59 Experimental rotation angles of the adherents for Experiment 4
Six experiments are carried out. Figure 60 shows the S-δ curves for the experiments
where δ is the separation displacement at the crack tip. With the experimentally measured
S, v, w, θ1 and θ2, Eq. (21) gives the J-δ curves shown in Fig. 61. Figure 62 shows the
peel vs. shear deformations at the crack tip, measured durring the experiment. The results
of experiments are given, individually, in the appendix, cf. Fig. A3.
Fig. 60 Experimental results of MCB-tests. Force vs. displacement at the crack tip.
0 50 100 150 200 250 300 350 400 450 500-3
-2.5
-2
-1.5
-1
-0.5
0
(µm)
(
de
g)
Lower adherent
Upper adherent
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
(µm)
S (
N)
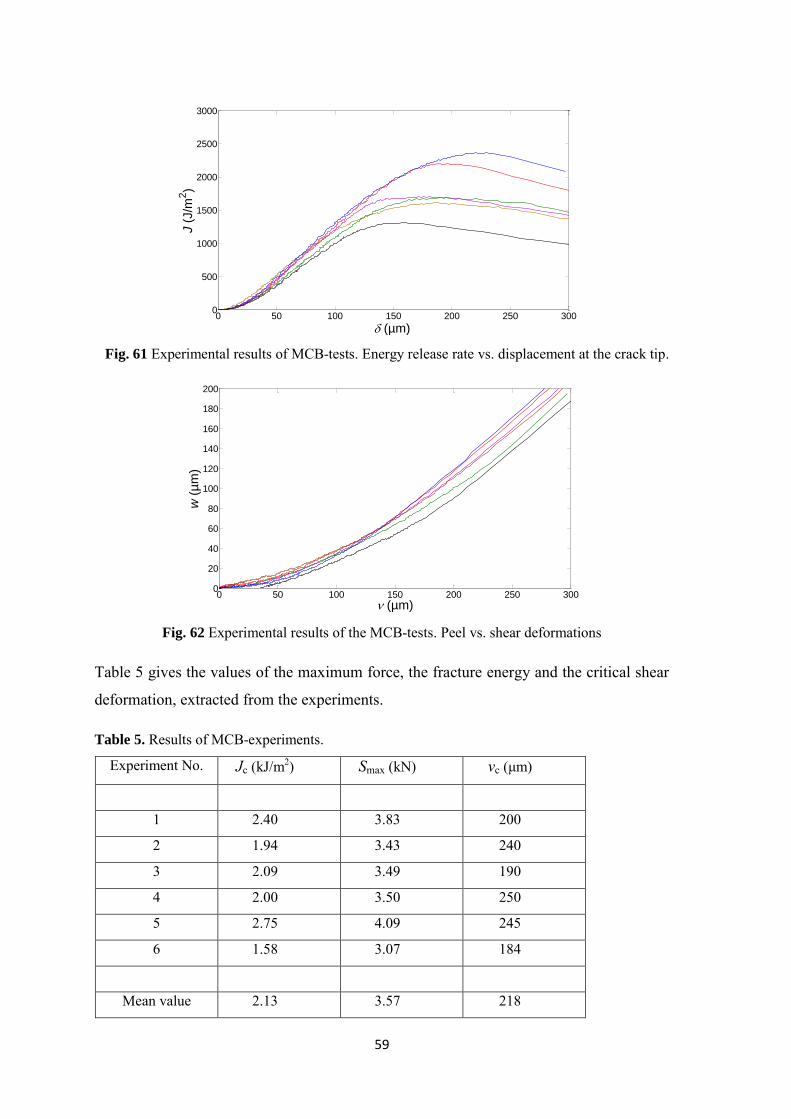
59
Fig. 61 Experimental results of MCB-tests. Energy release rate vs. displacement at the crack tip.
Fig. 62 Experimental results of the MCB-tests. Peel vs. shear deformations
Table 5 gives the values of the maximum force, the fracture energy and the critical shear
deformation, extracted from the experiments.
Table 5. Results of MCB-experiments.
Experiment No. Jc (kJ/m2) Smax (kN) vc (μm)
1 2.40 3.83 200
2 1.94 3.43 240
3 2.09 3.49 190
4 2.00 3.50 250
5 2.75 4.09 245
6 1.58 3.07 184
Mean value 2.13 3.57 218
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
(µm)
J (
J/m
2)
0 50 100 150 200 250 3000
20
40
60
80
100
120
140
160
180
200
(µm)
w (
µm
)
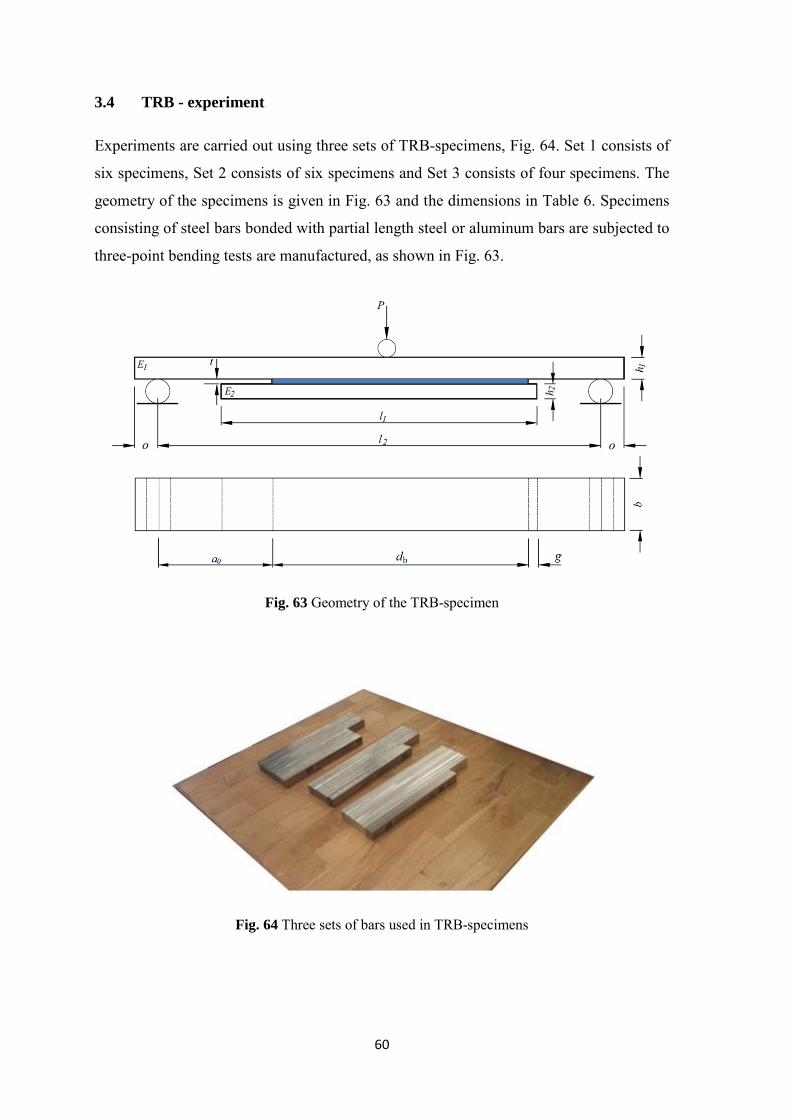
60
3.4 TRB - experiment
Experiments are carried out using three sets of TRB-specimens, Fig. 64. Set 1 consists of
six specimens, Set 2 consists of six specimens and Set 3 consists of four specimens. The
geometry of the specimens is given in Fig. 63 and the dimensions in Table 6. Specimens
consisting of steel bars bonded with partial length steel or aluminum bars are subjected to
three-point bending tests are manufactured, as shown in Fig. 63.
Fig. 63 Geometry of the TRB-specimen
Fig. 64 Three sets of bars used in TRB-specimens
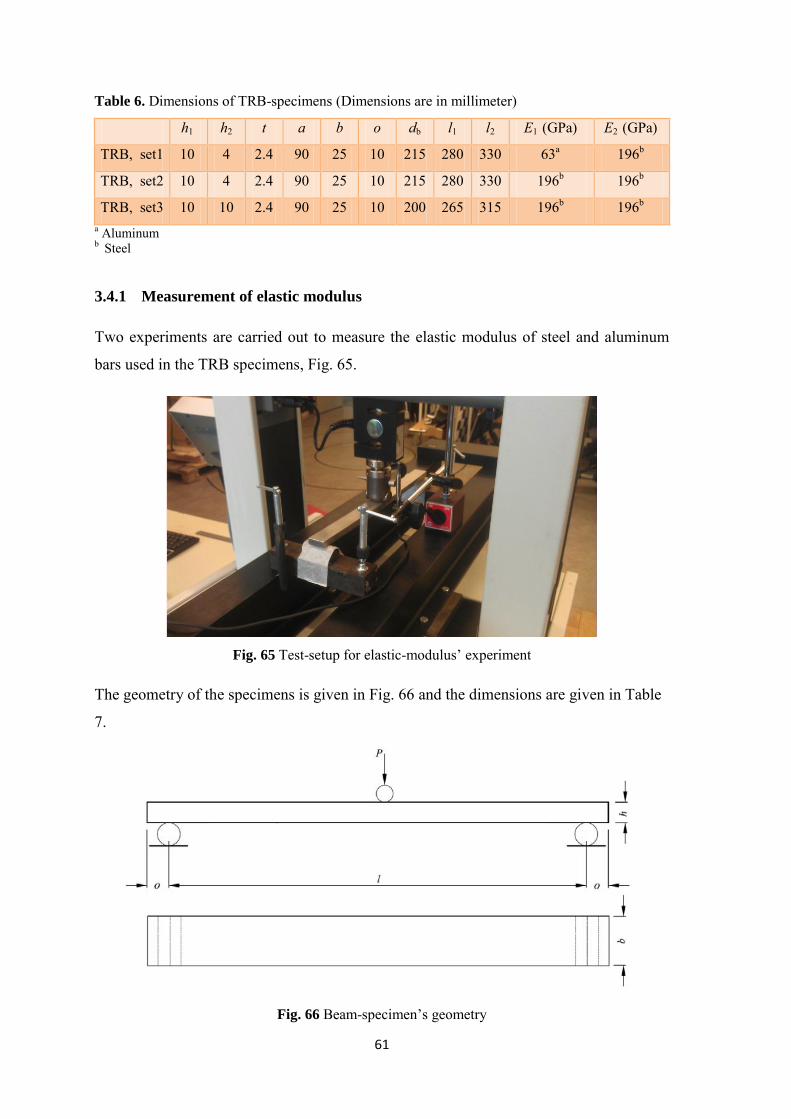
61
Table 6. Dimensions of TRB-specimens (Dimensions are in millimeter)
h1 h2 t a b o db l1 l2 E1 (GPa) E2 (GPa)
TRB, set1 10 4 2.4 90 25 10 215 280 330 63a 196b
TRB, set2 10 4 2.4 90 25 10 215 280 330 196b 196b
TRB, set3 10 10 2.4 90 25 10 200 265 315 196b 196b a Aluminum b Steel 3.4.1 Measurement of elastic modulus
Two experiments are carried out to measure the elastic modulus of steel and aluminum
bars used in the TRB specimens, Fig. 65.
Fig. 65 Test-setup for elastic-modulus’ experiment
The geometry of the specimens is given in Fig. 66 and the dimensions are given in Table
7.
Fig. 66 Beam-specimen’s geometry
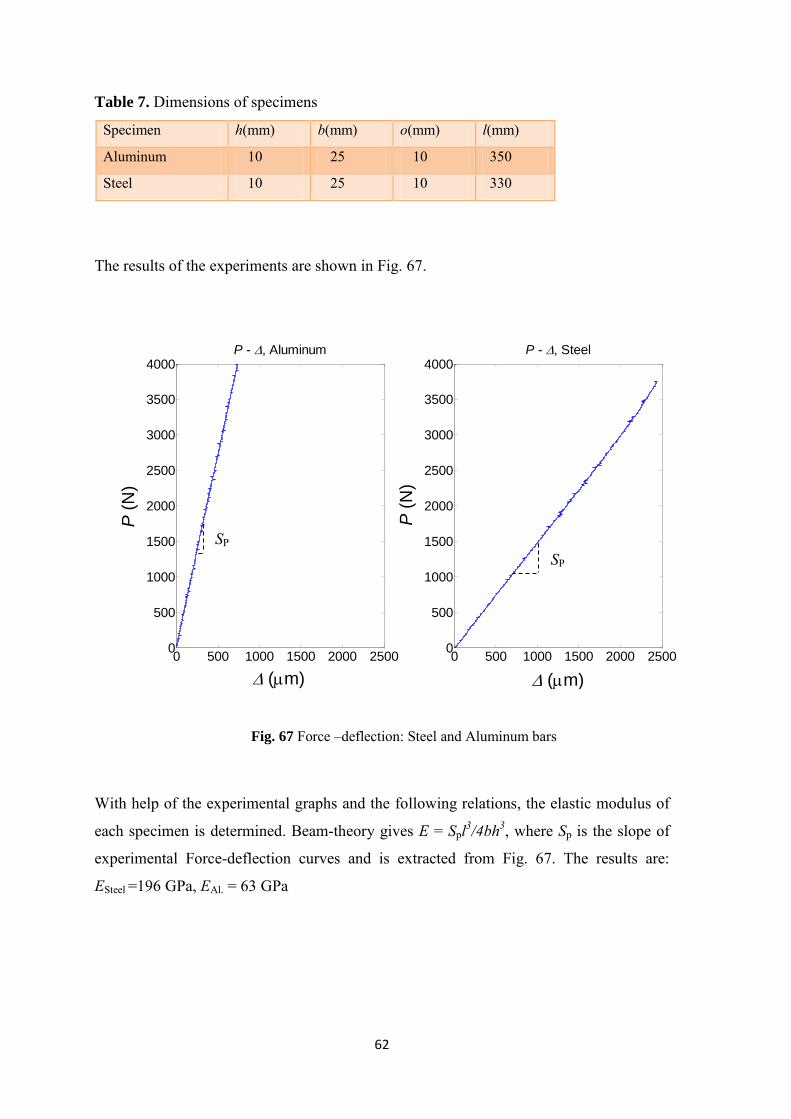
62
Table 7. Dimensions of specimens
Specimen h(mm) b(mm) o(mm) l(mm)
Aluminum 10 25 10 350
Steel 10 25 10 330
The results of the experiments are shown in Fig. 67.
Fig. 67 Force –deflection: Steel and Aluminum bars
With help of the experimental graphs and the following relations, the elastic modulus of
each specimen is determined. Beam-theory gives E = Spl3/4bh3, where Sp is the slope of
experimental Force-deflection curves and is extracted from Fig. 67. The results are:
ESteel =196 GPa, EAl. = 63 GPa
0 500 1000 1500 2000 25000
500
1000
1500
2000
2500
3000
3500
4000P - , Aluminum
(m)
P (
N)
0 500 1000 1500 2000 25000
500
1000
1500
2000
2500
3000
3500
4000P - , Steel
(m)
P (
N)
SP SP
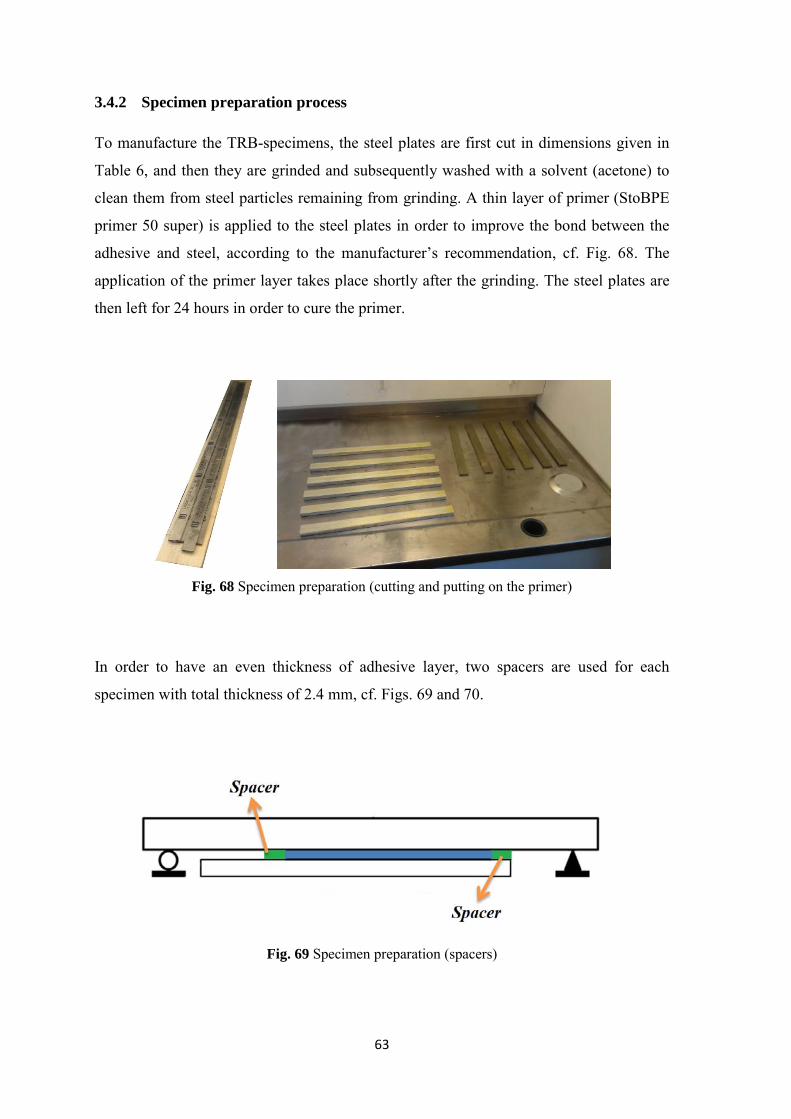
63
3.4.2 Specimen preparation process
To manufacture the TRB-specimens, the steel plates are first cut in dimensions given in
Table 6, and then they are grinded and subsequently washed with a solvent (acetone) to
clean them from steel particles remaining from grinding. A thin layer of primer (StoBPE
primer 50 super) is applied to the steel plates in order to improve the bond between the
adhesive and steel, according to the manufacturer’s recommendation, cf. Fig. 68. The
application of the primer layer takes place shortly after the grinding. The steel plates are
then left for 24 hours in order to cure the primer.
Fig. 68 Specimen preparation (cutting and putting on the primer)
In order to have an even thickness of adhesive layer, two spacers are used for each
specimen with total thickness of 2.4 mm, cf. Figs. 69 and 70.
Fig. 69 Specimen preparation (spacers)
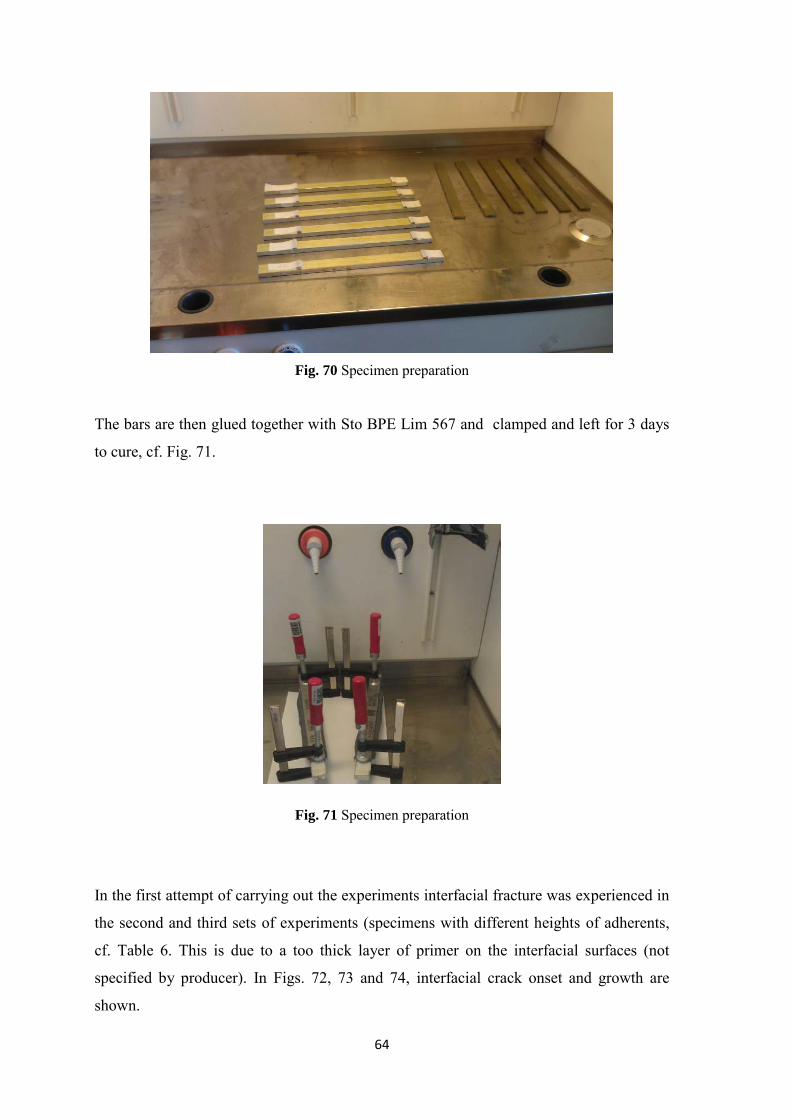
64
Fig. 70 Specimen preparation
The bars are then glued together with Sto BPE Lim 567 and clamped and left for 3 days
to cure, cf. Fig. 71.
Fig. 71 Specimen preparation
In the first attempt of carrying out the experiments interfacial fracture was experienced in
the second and third sets of experiments (specimens with different heights of adherents,
cf. Table 6. This is due to a too thick layer of primer on the interfacial surfaces (not
specified by producer). In Figs. 72, 73 and 74, interfacial crack onset and growth are
shown.
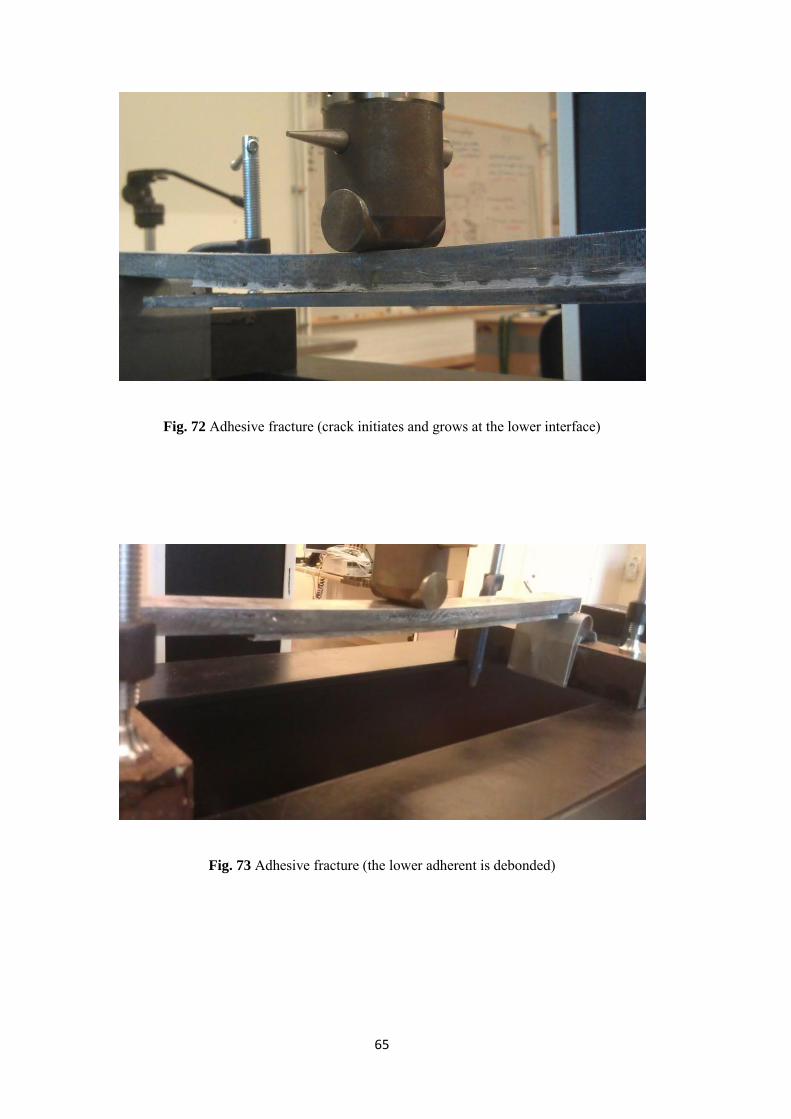
65
Fig. 72 Adhesive fracture (crack initiates and grows at the lower interface)
Fig. 73 Adhesive fracture (the lower adherent is debonded)
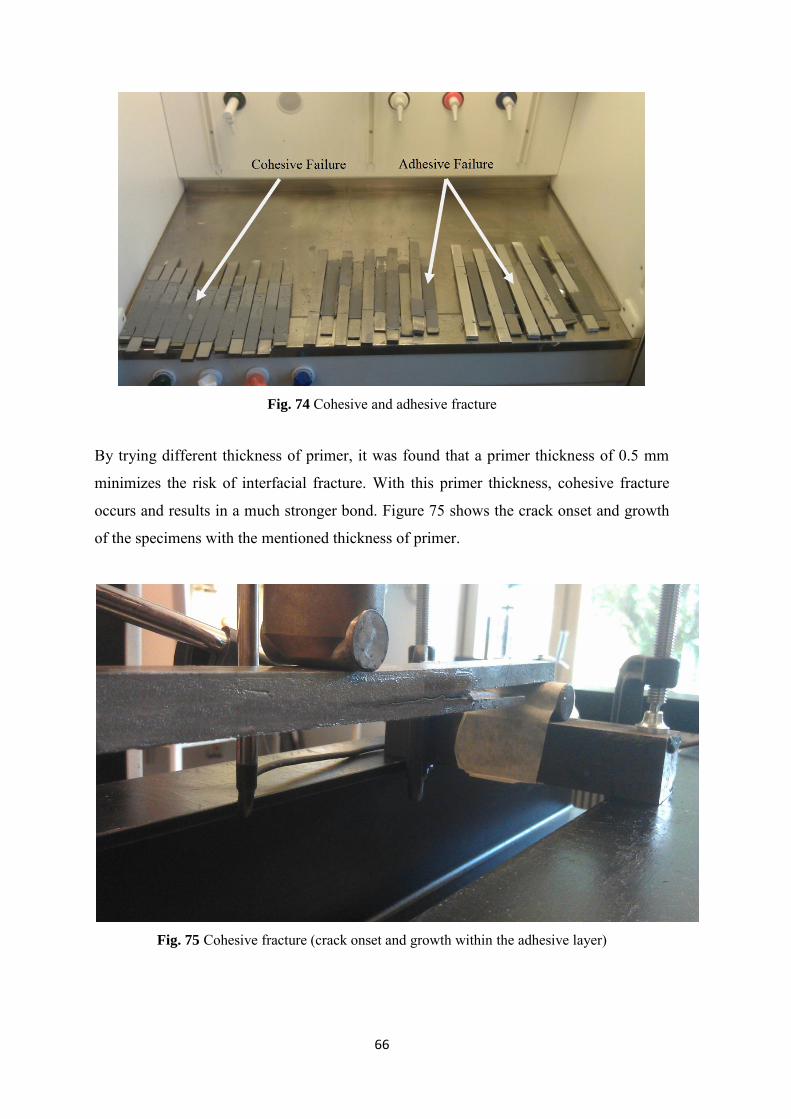
66
Fig. 74 Cohesive and adhesive fracture
By trying different thickness of primer, it was found that a primer thickness of 0.5 mm
minimizes the risk of interfacial fracture. With this primer thickness, cohesive fracture
occurs and results in a much stronger bond. Figure 75 shows the crack onset and growth
of the specimens with the mentioned thickness of primer.
Fig. 75 Cohesive fracture (crack onset and growth within the adhesive layer)
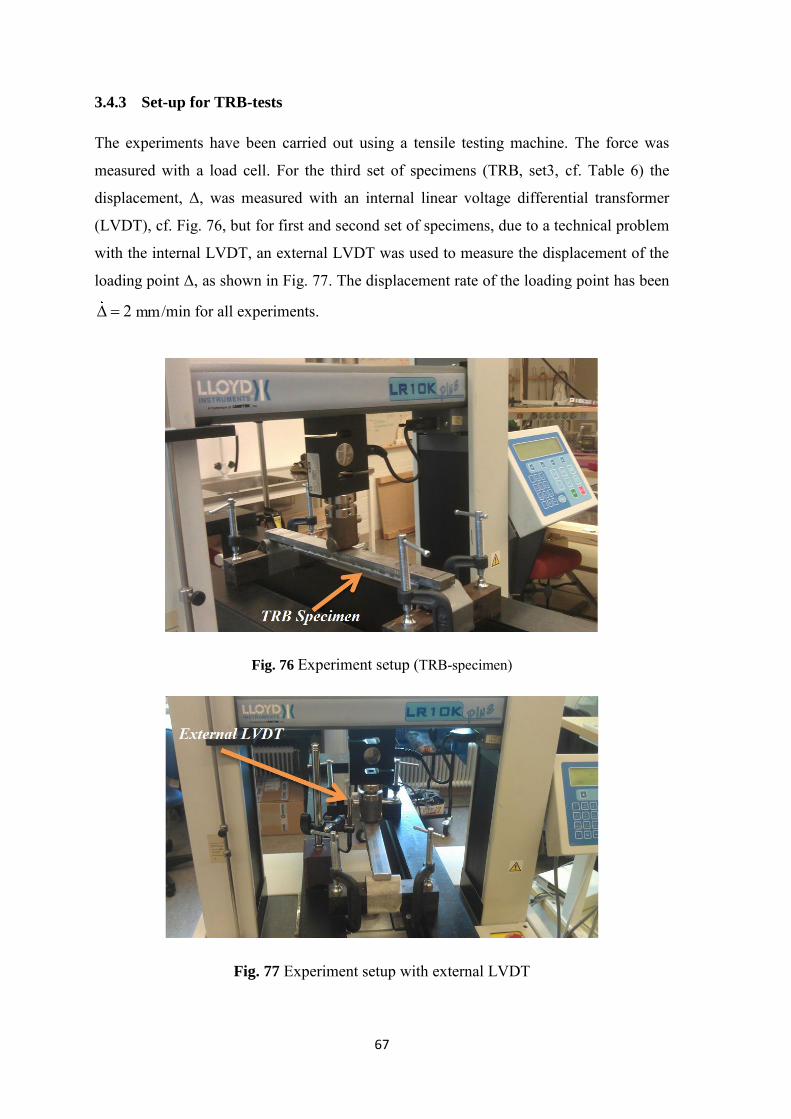
67
3.4.3 Set-up for TRB-tests
The experiments have been carried out using a tensile testing machine. The force was
measured with a load cell. For the third set of specimens (TRB, set3, cf. Table 6) the
displacement, Δ, was measured with an internal linear voltage differential transformer
(LVDT), cf. Fig. 76, but for first and second set of specimens, due to a technical problem
with the internal LVDT, an external LVDT was used to measure the displacement of the
loading point Δ, as shown in Fig. 77. The displacement rate of the loading point has been
2 mm /min for all experiments.
Fig. 76 Experiment setup (TRB-specimen)
Fig. 77 Experiment setup with external LVDT
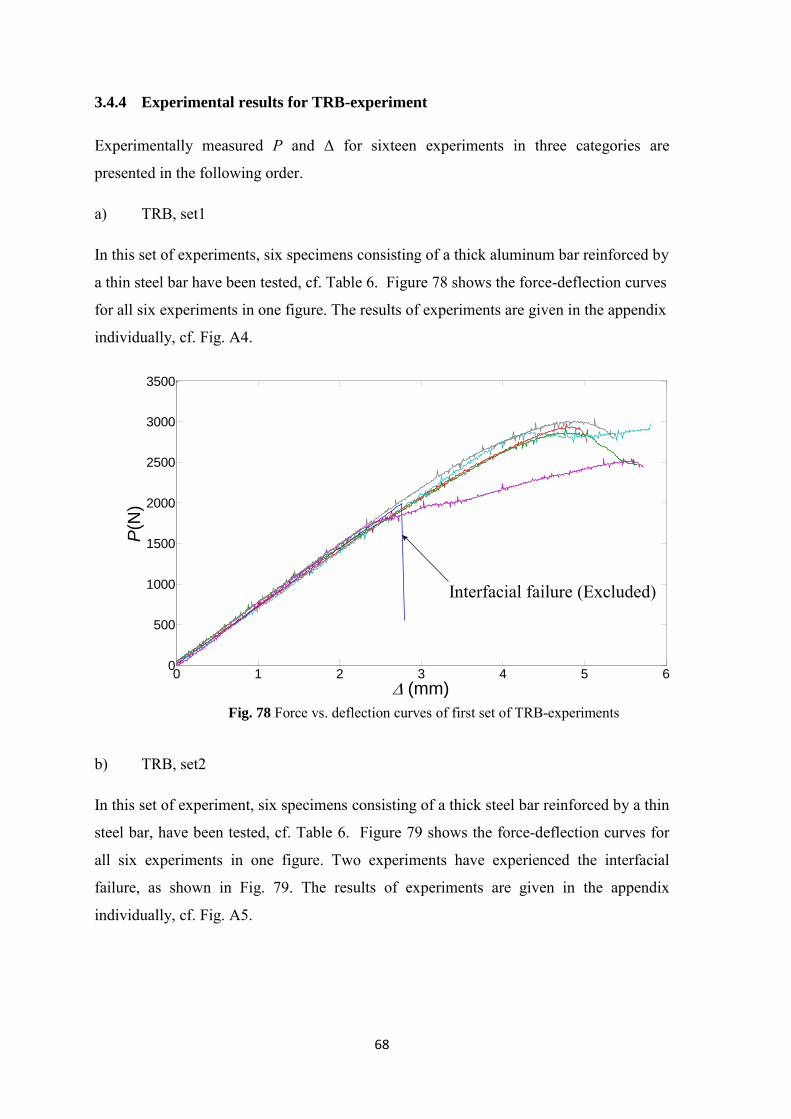
68
3.4.4 Experimental results for TRB-experiment
Experimentally measured P and Δ for sixteen experiments in three categories are
presented in the following order.
a) TRB, set1
In this set of experiments, six specimens consisting of a thick aluminum bar reinforced by
a thin steel bar have been tested, cf. Table 6. Figure 78 shows the force-deflection curves
for all six experiments in one figure. The results of experiments are given in the appendix
individually, cf. Fig. A4.
Fig. 78 Force vs. deflection curves of first set of TRB-experiments
b) TRB, set2
In this set of experiment, six specimens consisting of a thick steel bar reinforced by a thin
steel bar, have been tested, cf. Table 6. Figure 79 shows the force-deflection curves for
all six experiments in one figure. Two experiments have experienced the interfacial
failure, as shown in Fig. 79. The results of experiments are given in the appendix
individually, cf. Fig. A5.
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
(mm)
P(N
)
Interfacial failure (Excluded)
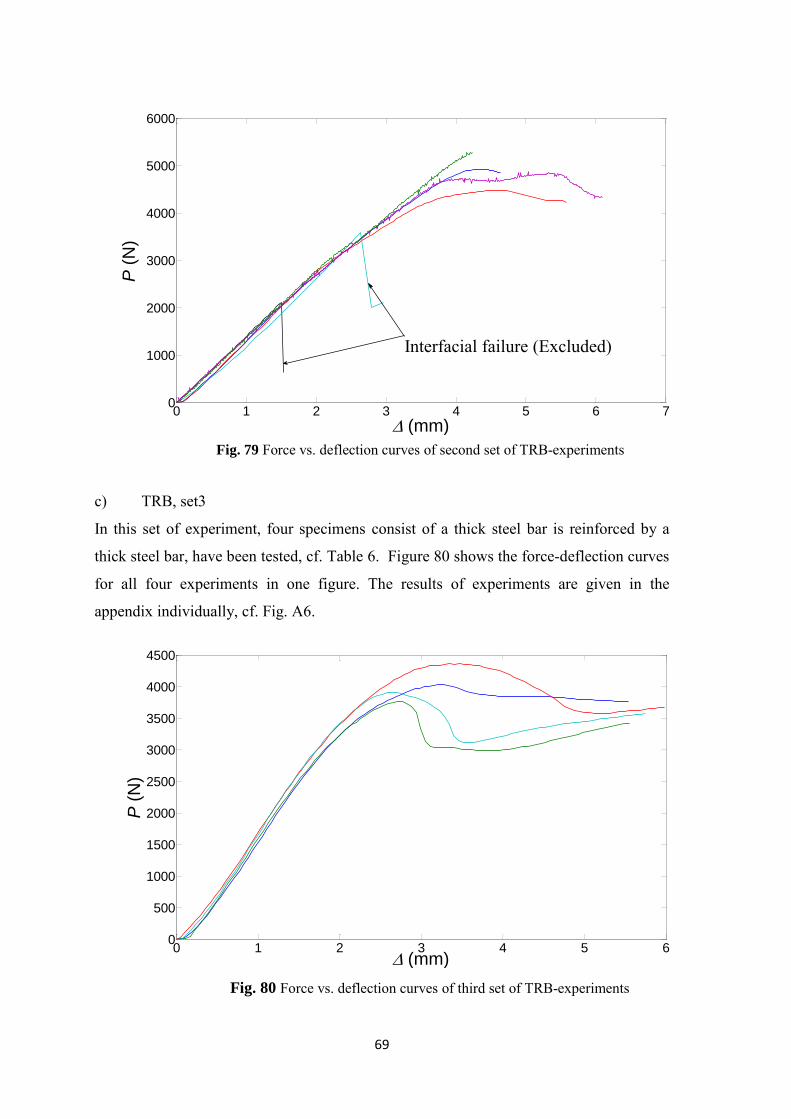
69
Fig. 79 Force vs. deflection curves of second set of TRB-experiments
c) TRB, set3
In this set of experiment, four specimens consist of a thick steel bar is reinforced by a
thick steel bar, have been tested, cf. Table 6. Figure 80 shows the force-deflection curves
for all four experiments in one figure. The results of experiments are given in the
appendix individually, cf. Fig. A6.
Fig. 80 Force vs. deflection curves of third set of TRB-experiments
0 1 2 3 4 5 6 70
1000
2000
3000
4000
5000
6000
(mm)
P (
N)
Interfacial failure (Excluded)
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
4000
4500
(mm)
P (
N)
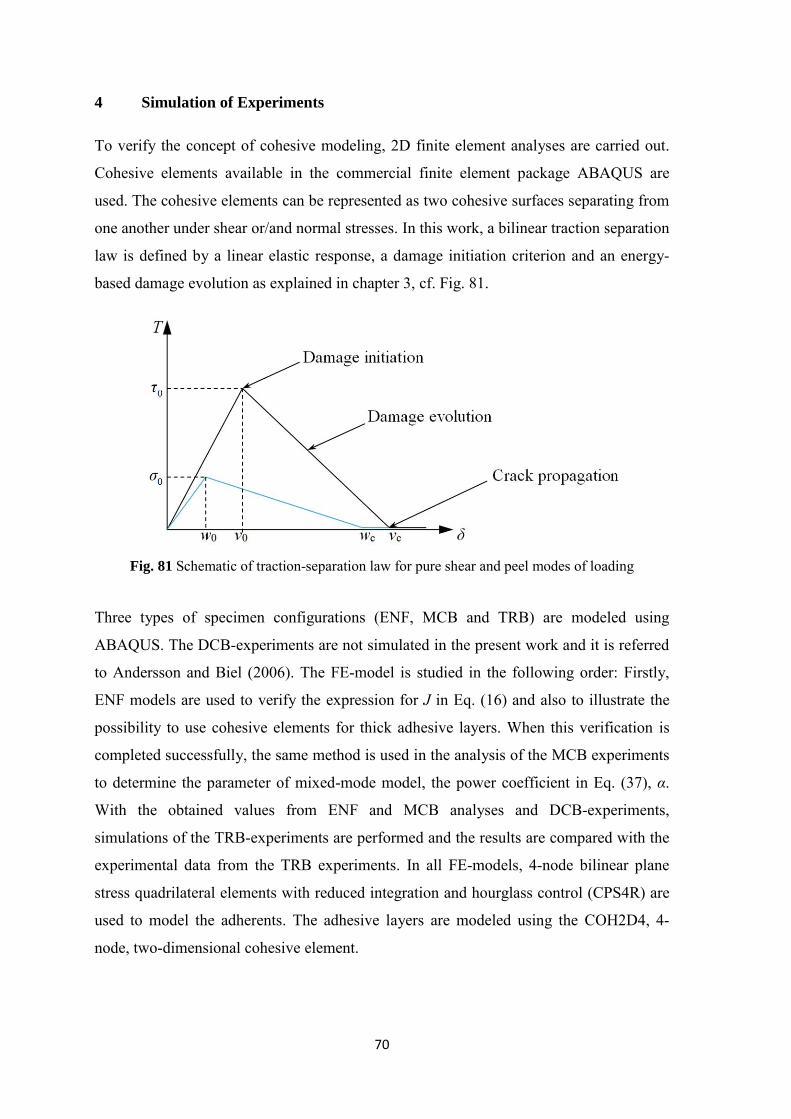
70
4 Simulation of Experiments
To verify the concept of cohesive modeling, 2D finite element analyses are carried out.
Cohesive elements available in the commercial finite element package ABAQUS are
used. The cohesive elements can be represented as two cohesive surfaces separating from
one another under shear or/and normal stresses. In this work, a bilinear traction separation
law is defined by a linear elastic response, a damage initiation criterion and an energy-
based damage evolution as explained in chapter 3, cf. Fig. 81.
Fig. 81 Schematic of traction-separation law for pure shear and peel modes of loading
Three types of specimen configurations (ENF, MCB and TRB) are modeled using
ABAQUS. The DCB-experiments are not simulated in the present work and it is referred
to Andersson and Biel (2006). The FE-model is studied in the following order: Firstly,
ENF models are used to verify the expression for J in Eq. (16) and also to illustrate the
possibility to use cohesive elements for thick adhesive layers. When this verification is
completed successfully, the same method is used in the analysis of the MCB experiments
to determine the parameter of mixed-mode model, the power coefficient in Eq. (37), α.
With the obtained values from ENF and MCB analyses and DCB-experiments,
simulations of the TRB-experiments are performed and the results are compared with the
experimental data from the TRB experiments. In all FE-models, 4-node bilinear plane
stress quadrilateral elements with reduced integration and hourglass control (CPS4R) are
used to model the adherents. The adhesive layers are modeled using the COH2D4, 4-
node, two-dimensional cohesive element.
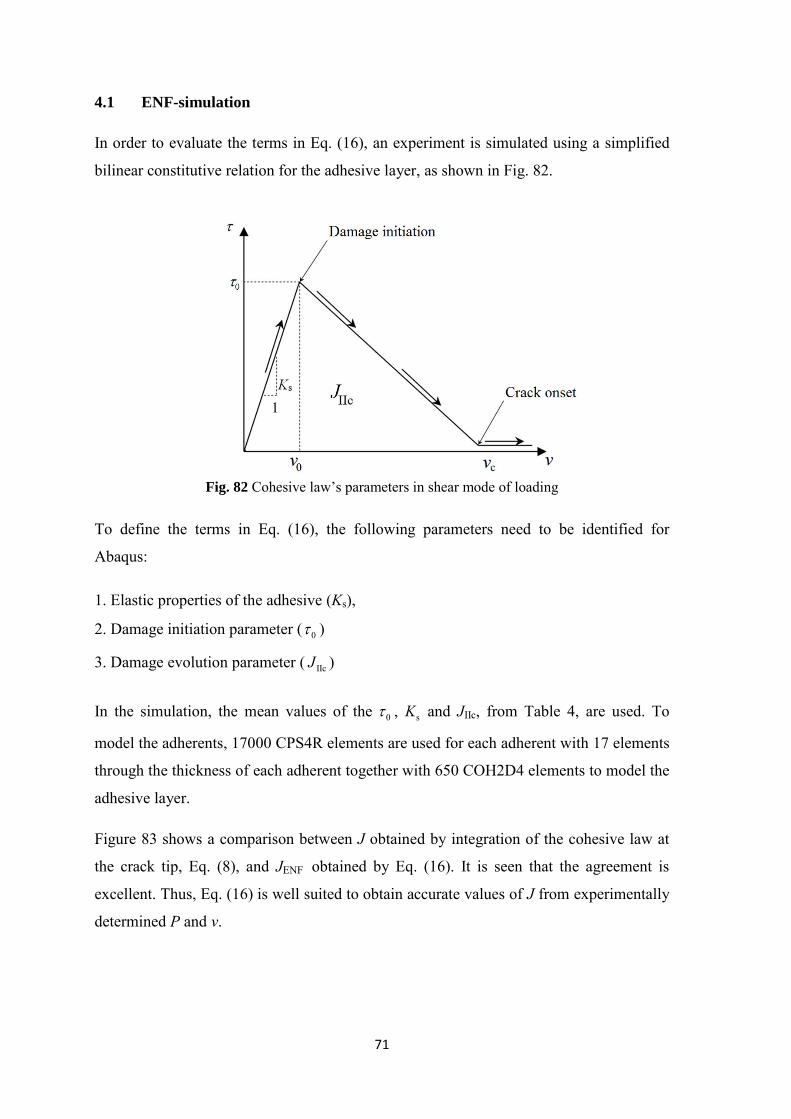
71
4.1 ENF-simulation
In order to evaluate the terms in Eq. (16), an experiment is simulated using a simplified
bilinear constitutive relation for the adhesive layer, as shown in Fig. 82.
1
Fig. 82 Cohesive law’s parameters in shear mode of loading
To define the terms in Eq. (16), the following parameters need to be identified for
Abaqus:
1. Elastic properties of the adhesive (Ks),
2. Damage initiation parameter ( 0 )
3. Damage evolution parameter ( IIcJ )
In the simulation, the mean values of the 0 , sK and JIIc, from Table 4, are used. To
model the adherents, 17000 CPS4R elements are used for each adherent with 17 elements
through the thickness of each adherent together with 650 COH2D4 elements to model the
adhesive layer.
Figure 83 shows a comparison between J obtained by integration of the cohesive law at
the crack tip, Eq. (8), and JENF obtained by Eq. (16). It is seen that the agreement is
excellent. Thus, Eq. (16) is well suited to obtain accurate values of J from experimentally
determined P and v.
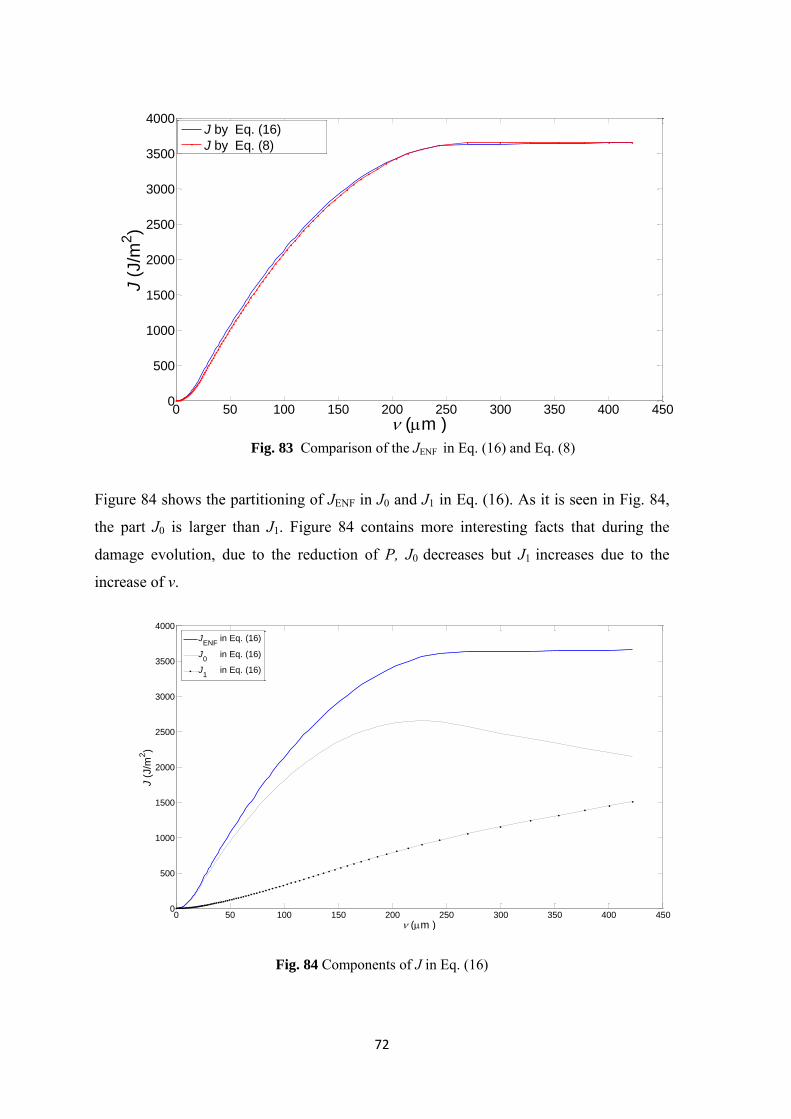
72
Fig. 83 Comparison of the JENF in Eq. (16) and Eq. (8)
Figure 84 shows the partitioning of JENF in J0 and J1 in Eq. (16). As it is seen in Fig. 84,
the part J0 is larger than J1. Figure 84 contains more interesting facts that during the
damage evolution, due to the reduction of P, J0 decreases but J1 increases due to the
increase of v.
Fig. 84 Components of J in Eq. (16)
0 50 100 150 200 250 300 350 400 4500
500
1000
1500
2000
2500
3000
3500
4000
(m )
J (
J/m
2)
J by Eq. (16)
J by Eq. (8)
0 50 100 150 200 250 300 350 400 4500
500
1000
1500
2000
2500
3000
3500
4000
(m )
J (
J/m
2)
JENF
in Eq. (16)
J0 in Eq. (16)
J1 in Eq. (16)

73
Figure 85 shows good agreement between the experimental J-v curves and the result of
ENF-simulation.
Fig. 85 Energy release rate vs. shear deformation at the crack tip by simulation and experiments
Figure 86 shows the bilinear cohesive law used in simulations in relation to the
experimentally obtained cohesive laws.
Fig. 86 Triangular cohesive law, used in simulation in comparison to the experimental cohesive
laws
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
(m )
J (
J/m
2)
SimulationExperiments
0 50 100 150 200 250 300 3500
5
10
15
20
25
30
35
(m )
(M
Pa
)
Simulation
Experiments
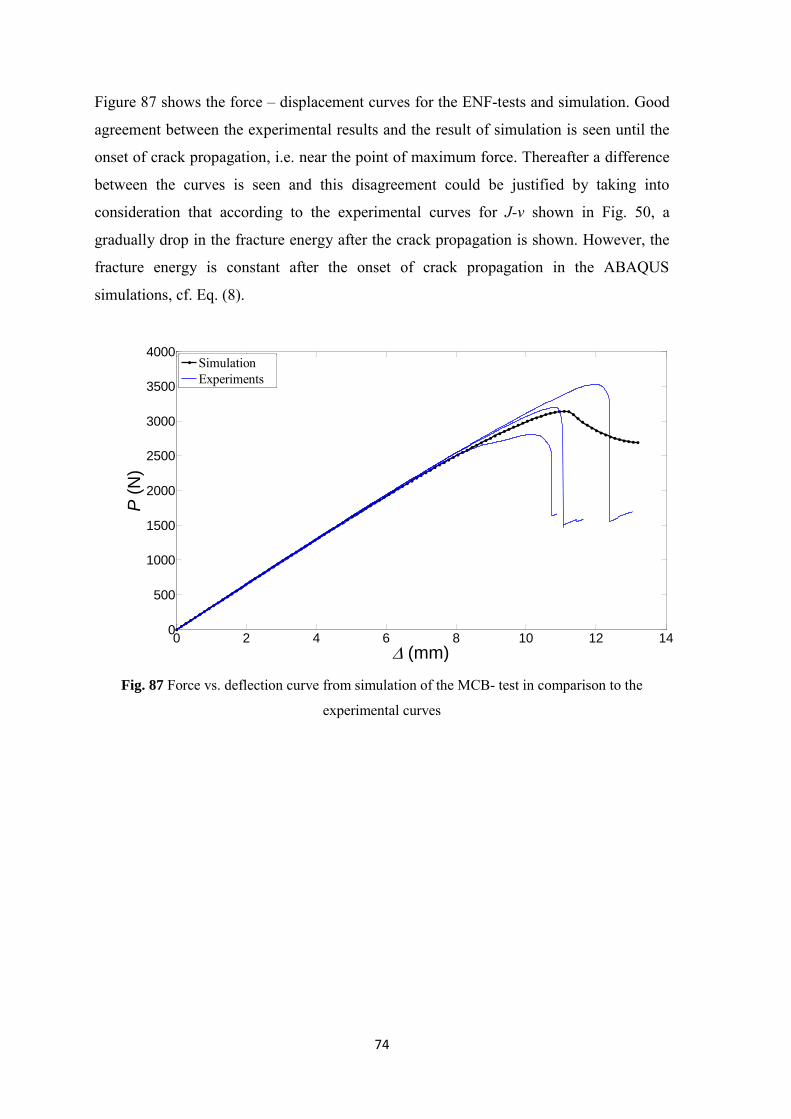
74
Figure 87 shows the force – displacement curves for the ENF-tests and simulation. Good
agreement between the experimental results and the result of simulation is seen until the
onset of crack propagation, i.e. near the point of maximum force. Thereafter a difference
between the curves is seen and this disagreement could be justified by taking into
consideration that according to the experimental curves for J-v shown in Fig. 50, a
gradually drop in the fracture energy after the crack propagation is shown. However, the
fracture energy is constant after the onset of crack propagation in the ABAQUS
simulations, cf. Eq. (8).
Fig. 87 Force vs. deflection curve from simulation of the MCB- test in comparison to the
experimental curves
0 2 4 6 8 10 12 140
500
1000
1500
2000
2500
3000
3500
4000
(mm)
P (
N)
SimulationExperiments
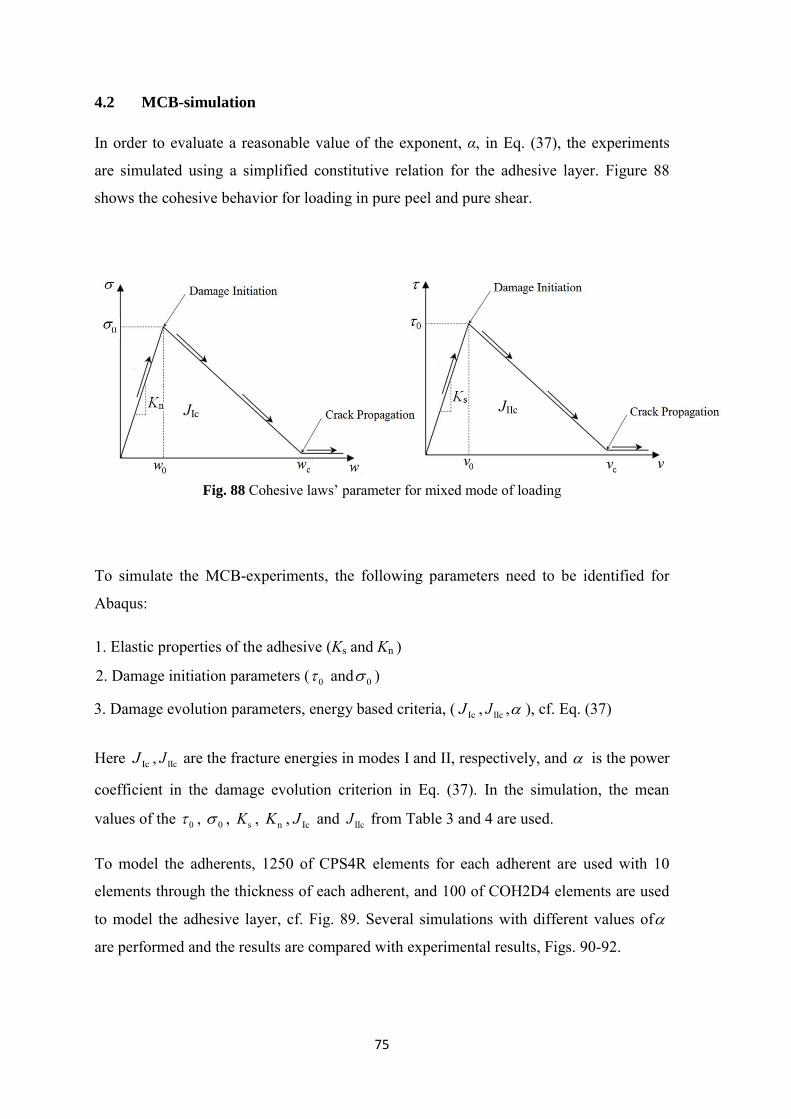
75
4.2 MCB-simulation
In order to evaluate a reasonable value of the exponent, α, in Eq. (37), the experiments
are simulated using a simplified constitutive relation for the adhesive layer. Figure 88
shows the cohesive behavior for loading in pure peel and pure shear.
Fig. 88 Cohesive laws’ parameter for mixed mode of loading
To simulate the MCB-experiments, the following parameters need to be identified for
Abaqus:
1. Elastic properties of the adhesive (Ks and Kn )
2. Damage initiation parameters ( 0 and 0 )
3. Damage evolution parameters, energy based criteria, ( IcJ , IIcJ , ), cf. Eq. (37)
Here IcJ , IIcJ are the fracture energies in modes I and II, respectively, and is the power
coefficient in the damage evolution criterion in Eq. (37). In the simulation, the mean
values of the 0 , 0 , sK , nK , IcJ and IIcJ from Table 3 and 4 are used.
To model the adherents, 1250 of CPS4R elements for each adherent are used with 10
elements through the thickness of each adherent, and 100 of COH2D4 elements are used
to model the adhesive layer, cf. Fig. 89. Several simulations with different values of are performed and the results are compared with experimental results, Figs. 90-92.
JIIc JIc
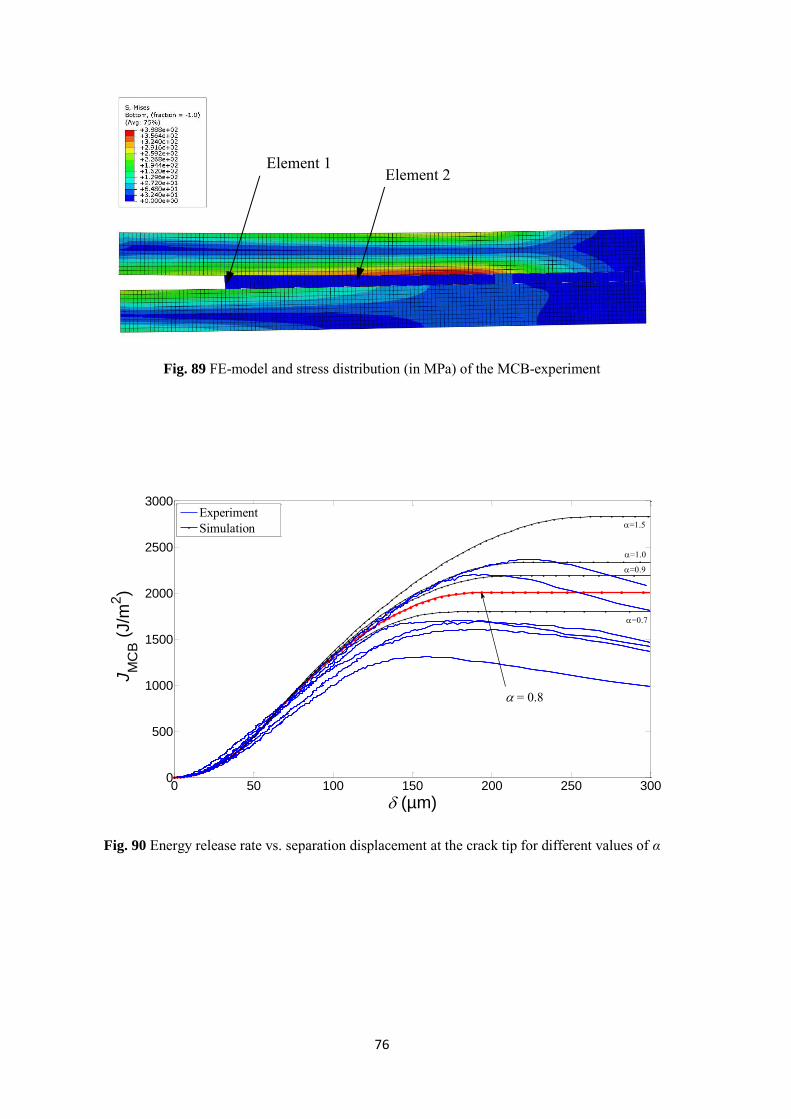
76
Fig. 89 FE-model and stress distribution (in MPa) of the MCB-experiment
Fig. 90 Energy release rate vs. separation displacement at the crack tip for different values of α
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
(µm)
JM
CB (
J/m
2)
=0.7
= 0.8
=0.9
=1.0
=1.5ExperimentSimulation
Element 1 Element 2
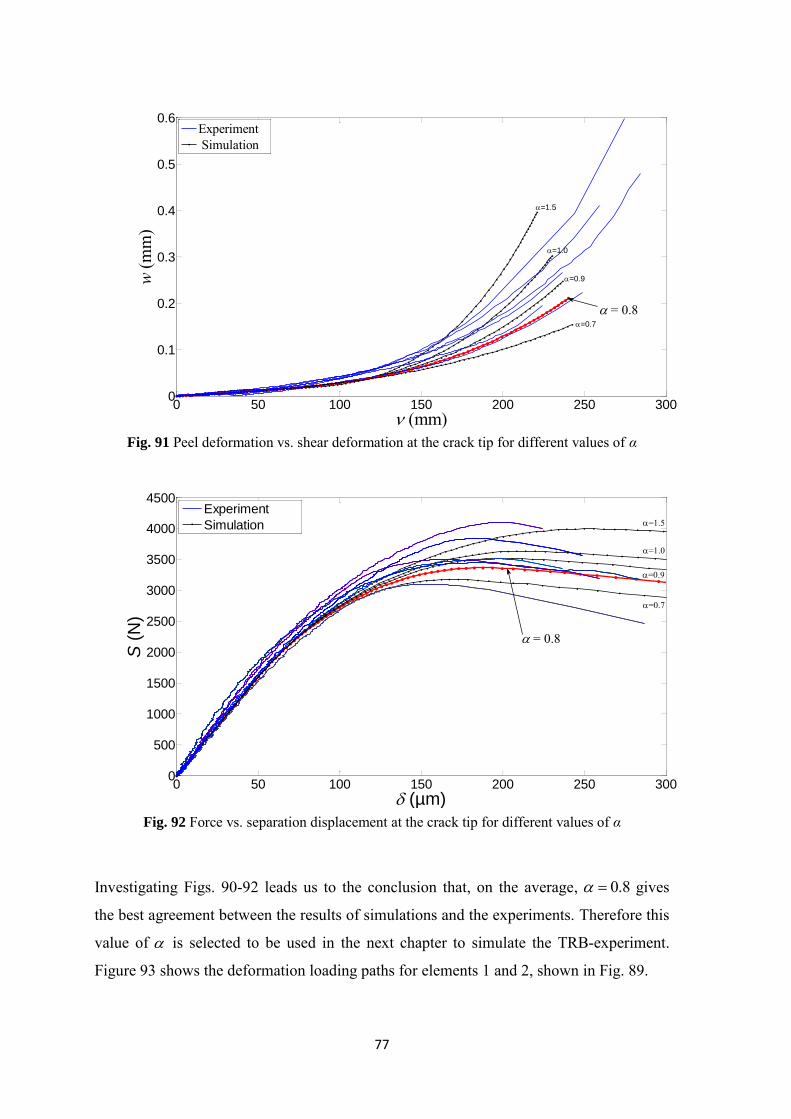
77
Fig. 91 Peel deformation vs. shear deformation at the crack tip for different values of α
Fig. 92 Force vs. separation displacement at the crack tip for different values of α
Investigating Figs. 90-92 leads us to the conclusion that, on the average, 0.8 gives
the best agreement between the results of simulations and the experiments. Therefore this
value of is selected to be used in the next chapter to simulate the TRB-experiment.
Figure 93 shows the deformation loading paths for elements 1 and 2, shown in Fig. 89.
0 50 100 150 200 250 3000
0.1
0.2
0.3
0.4
0.5
0.6
(mm)
w (m
m)
=0.7
= 0.8
=0.9
=1.0
=1.5
Experiment Simulation
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
(µm)
S (
N)
=0.7
= 0.8
=0.9
=1.0
=1.5Experiment
Simulation
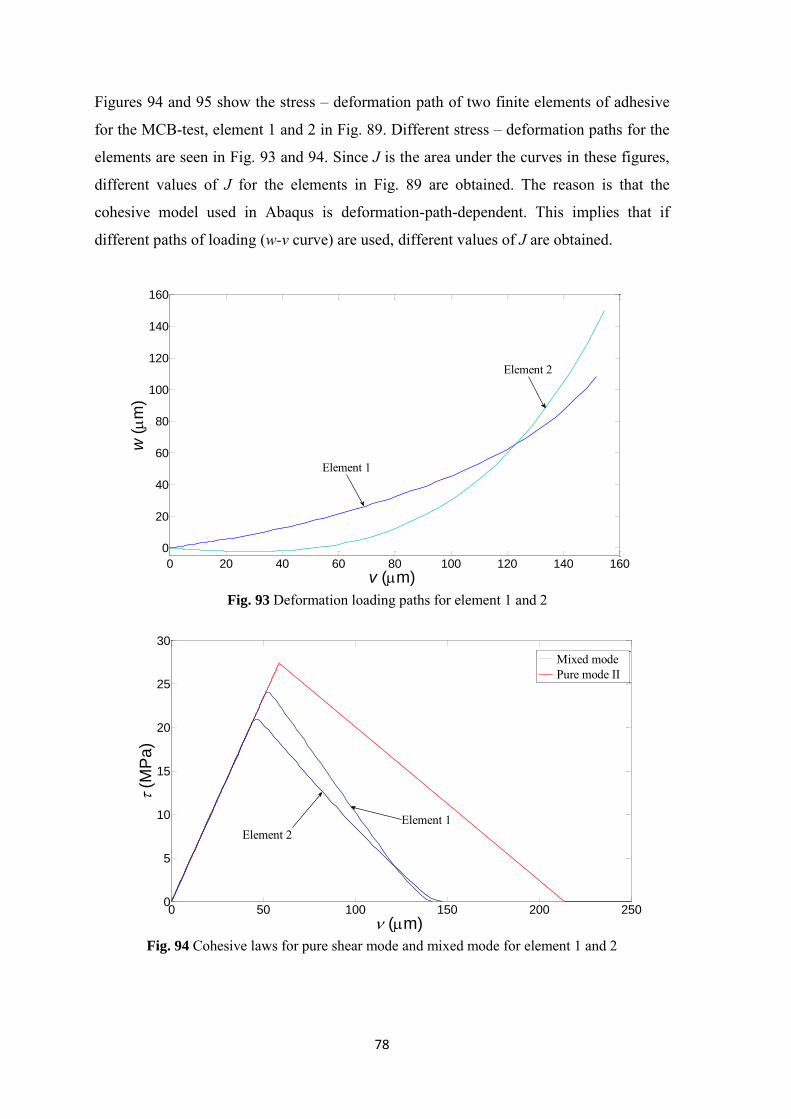
78
Figures 94 and 95 show the stress – deformation path of two finite elements of adhesive
for the MCB-test, element 1 and 2 in Fig. 89. Different stress – deformation paths for the
elements are seen in Fig. 93 and 94. Since J is the area under the curves in these figures,
different values of J for the elements in Fig. 89 are obtained. The reason is that the
cohesive model used in Abaqus is deformation-path-dependent. This implies that if
different paths of loading (w-v curve) are used, different values of J are obtained.
Fig. 93 Deformation loading paths for element 1 and 2
Fig. 94 Cohesive laws for pure shear mode and mixed mode for element 1 and 2
0 20 40 60 80 100 120 140 160
0
20
40
60
80
100
120
140
160
v (m)
w (
m)
Element 1
Element 2
0 50 100 150 200 2500
5
10
15
20
25
30
(m)
(M
Pa
)
Mixed mode Pure mode II
Element 2Element 1

79
Fig. 95 Cohesive laws for the pure peel mode and mixed mode for element 1 and 2
Figure 96 shows the comparison between J obtained by integration of the cohesive law at
the crack tip element, Eq. (2) and JMCB obtained by Eq. (21). Good agreement is observed
until the onset of crack propagation. Thereafter a difference between the curves is seen.
The origin for this disagreement can be the load path dependent fracture energy in
Abaqus’ cohesive model as discussed above. The fact that the model is deformation path
dependent implies that the J-integral is not integration path dependent. Thus, the accuracy
of Eq. (21) cannot be guaranteed.
Fig. 96 Energy release rate vs. separation displacement at the crack tip for the MCB specimen
by Eq. (2) and Eq. (21)
0 50 100 1500
5
10
15
20
25
w (m)
(
MP
a)
Mixed mode Pure mode I
Element 2
Element 1
0 100 200 300 400 500 600 700 8000
500
1000
1500
2000
2500
(µm)
JM
CB (
J/m
2)
JMCB by Eq. (2)
JMCB by Eq. (21)
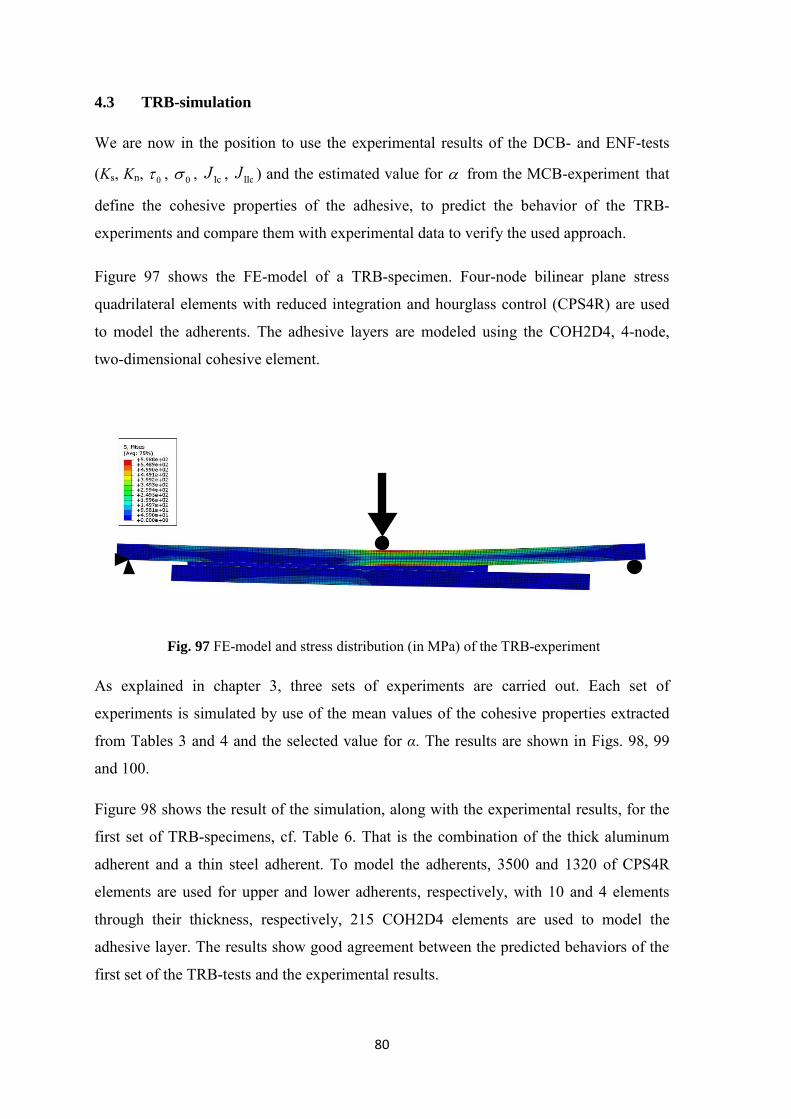
80
4.3 TRB-simulation
We are now in the position to use the experimental results of the DCB- and ENF-tests
(Ks, Kn, 0 , 0 , IcJ , IIcJ ) and the estimated value for from the MCB-experiment that
define the cohesive properties of the adhesive, to predict the behavior of the TRB-
experiments and compare them with experimental data to verify the used approach.
Figure 97 shows the FE-model of a TRB-specimen. Four-node bilinear plane stress
quadrilateral elements with reduced integration and hourglass control (CPS4R) are used
to model the adherents. The adhesive layers are modeled using the COH2D4, 4-node,
two-dimensional cohesive element.
Fig. 97 FE-model and stress distribution (in MPa) of the TRB-experiment
As explained in chapter 3, three sets of experiments are carried out. Each set of
experiments is simulated by use of the mean values of the cohesive properties extracted
from Tables 3 and 4 and the selected value for α. The results are shown in Figs. 98, 99
and 100.
Figure 98 shows the result of the simulation, along with the experimental results, for the
first set of TRB-specimens, cf. Table 6. That is the combination of the thick aluminum
adherent and a thin steel adherent. To model the adherents, 3500 and 1320 of CPS4R
elements are used for upper and lower adherents, respectively, with 10 and 4 elements
through their thickness, respectively, 215 COH2D4 elements are used to model the
adhesive layer. The results show good agreement between the predicted behaviors of the
first set of the TRB-tests and the experimental results.
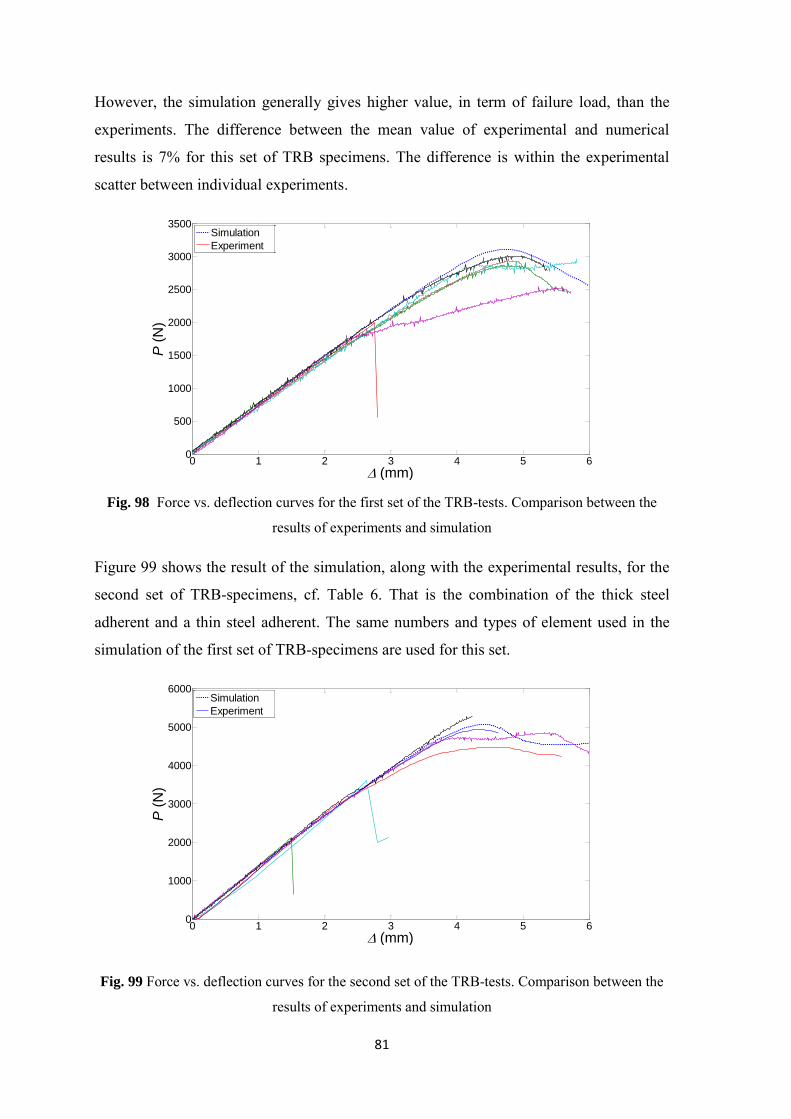
81
However, the simulation generally gives higher value, in term of failure load, than the
experiments. The difference between the mean value of experimental and numerical
results is 7% for this set of TRB specimens. The difference is within the experimental
scatter between individual experiments.
Fig. 98 Force vs. deflection curves for the first set of the TRB-tests. Comparison between the
results of experiments and simulation
Figure 99 shows the result of the simulation, along with the experimental results, for the
second set of TRB-specimens, cf. Table 6. That is the combination of the thick steel
adherent and a thin steel adherent. The same numbers and types of element used in the
simulation of the first set of TRB-specimens are used for this set.
Fig. 99 Force vs. deflection curves for the second set of the TRB-tests. Comparison between the
results of experiments and simulation
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
(mm)
P (
N)
Simulation
Experiment
0 1 2 3 4 5 60
1000
2000
3000
4000
5000
6000
(mm)
P (
N)
Simulation
Experiment
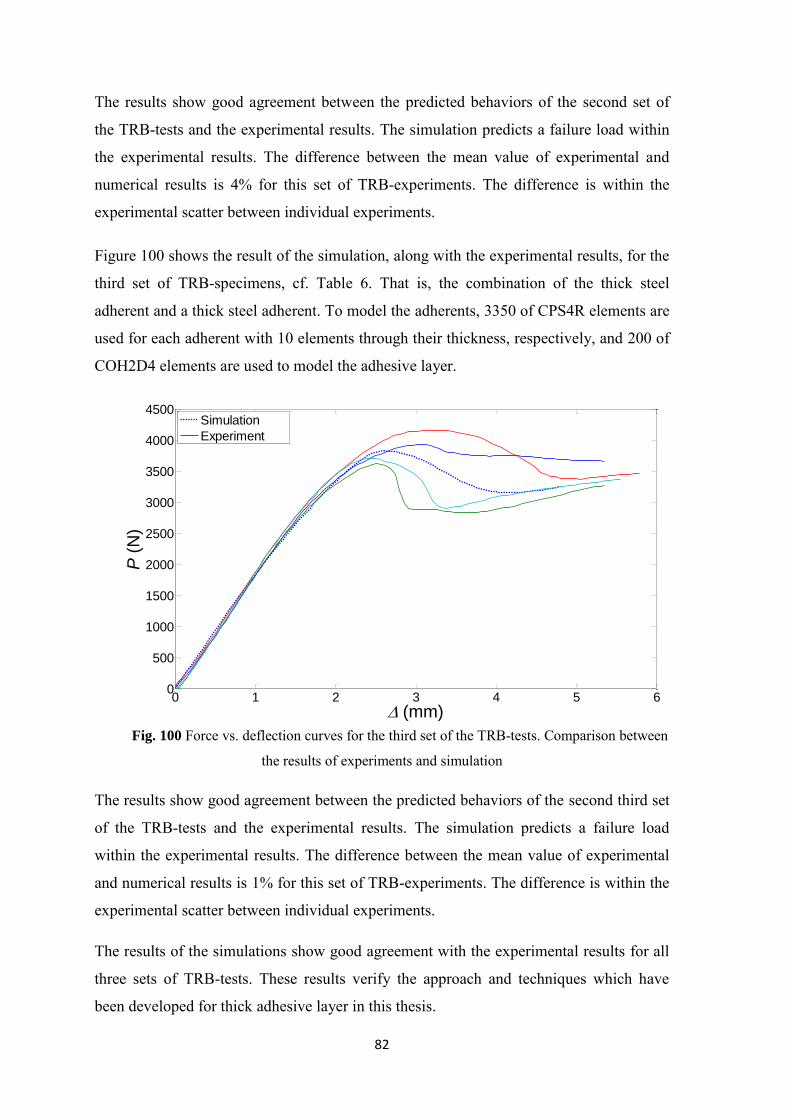
82
The results show good agreement between the predicted behaviors of the second set of
the TRB-tests and the experimental results. The simulation predicts a failure load within
the experimental results. The difference between the mean value of experimental and
numerical results is 4% for this set of TRB-experiments. The difference is within the
experimental scatter between individual experiments.
Figure 100 shows the result of the simulation, along with the experimental results, for the
third set of TRB-specimens, cf. Table 6. That is, the combination of the thick steel
adherent and a thick steel adherent. To model the adherents, 3350 of CPS4R elements are
used for each adherent with 10 elements through their thickness, respectively, and 200 of
COH2D4 elements are used to model the adhesive layer.
Fig. 100 Force vs. deflection curves for the third set of the TRB-tests. Comparison between
the results of experiments and simulation
The results show good agreement between the predicted behaviors of the second third set
of the TRB-tests and the experimental results. The simulation predicts a failure load
within the experimental results. The difference between the mean value of experimental
and numerical results is 1% for this set of TRB-experiments. The difference is within the
experimental scatter between individual experiments.
The results of the simulations show good agreement with the experimental results for all
three sets of TRB-tests. These results verify the approach and techniques which have
been developed for thick adhesive layer in this thesis.
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
4000
4500
(mm)
P (
N)
Simulation
Experiment
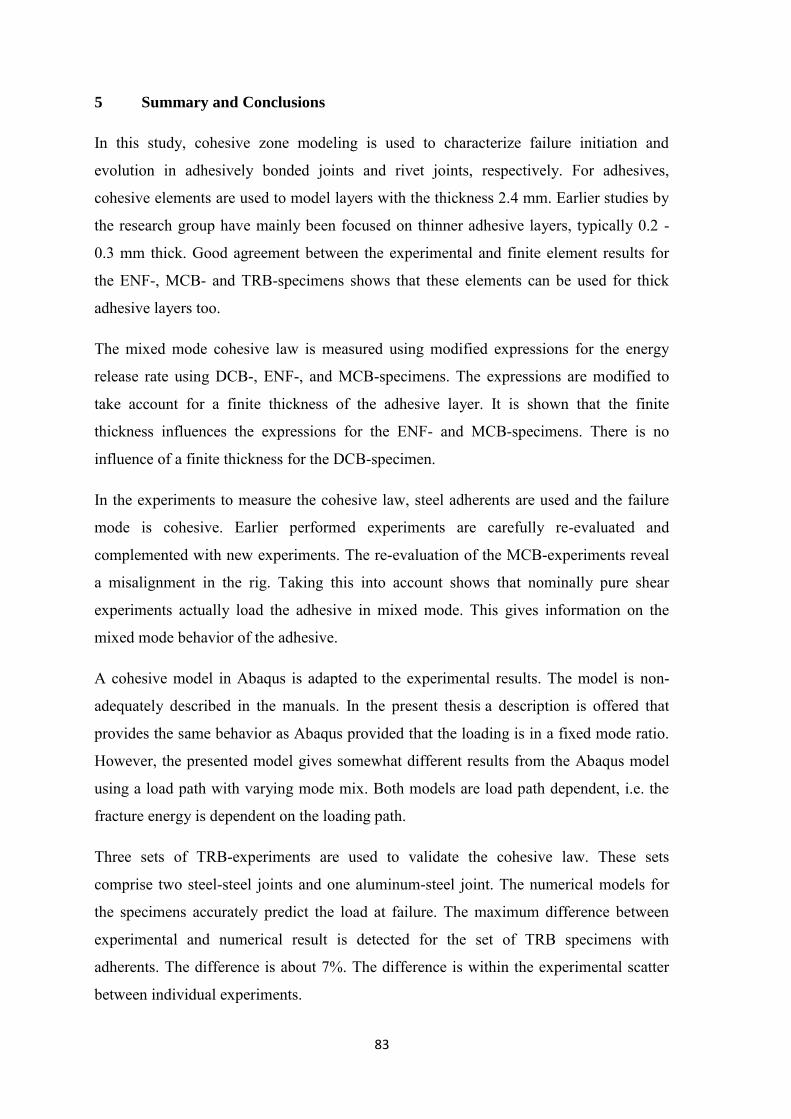
83
5 Summary and Conclusions
In this study, cohesive zone modeling is used to characterize failure initiation and
evolution in adhesively bonded joints and rivet joints, respectively. For adhesives,
cohesive elements are used to model layers with the thickness 2.4 mm. Earlier studies by
the research group have mainly been focused on thinner adhesive layers, typically 0.2 -
0.3 mm thick. Good agreement between the experimental and finite element results for
the ENF-, MCB- and TRB-specimens shows that these elements can be used for thick
adhesive layers too.
The mixed mode cohesive law is measured using modified expressions for the energy
release rate using DCB-, ENF-, and MCB-specimens. The expressions are modified to
take account for a finite thickness of the adhesive layer. It is shown that the finite
thickness influences the expressions for the ENF- and MCB-specimens. There is no
influence of a finite thickness for the DCB-specimen.
In the experiments to measure the cohesive law, steel adherents are used and the failure
mode is cohesive. Earlier performed experiments are carefully re-evaluated and
complemented with new experiments. The re-evaluation of the MCB-experiments reveal
a misalignment in the rig. Taking this into account shows that nominally pure shear
experiments actually load the adhesive in mixed mode. This gives information on the
mixed mode behavior of the adhesive.
A cohesive model in Abaqus is adapted to the experimental results. The model is non-
adequately described in the manuals. In the present thesis a description is offered that
provides the same behavior as Abaqus provided that the loading is in a fixed mode ratio.
However, the presented model gives somewhat different results from the Abaqus model
using a load path with varying mode mix. Both models are load path dependent, i.e. the
fracture energy is dependent on the loading path.
Three sets of TRB-experiments are used to validate the cohesive law. These sets
comprise two steel-steel joints and one aluminum-steel joint. The numerical models for
the specimens accurately predict the load at failure. The maximum difference between
experimental and numerical result is detected for the set of TRB specimens with
adherents. The difference is about 7%. The difference is within the experimental scatter
between individual experiments.

84
Thus, it appears safe to extract a cohesive law using one set of adherents and use it for
other adherents and even mixed adherents. At least as long as the failure mode is
cohesive.
The other issue studied in this thesis is the failure behavior of riveted joints. A method is
proposed for structural analysis of rivet joints using cohesive modeling. A theoretical and
numerical study supports the idea. It indicates that a modified DCB-specimen can be used
to measure the cohesive properties. It should be noted that these properties are used to
model a fracture process that is essentially governed by plasticity. The advantage with the
cohesive model is its possible ability to model a complex process using rather large-scale
finite elements. The numerical study of the riveted DCB-specimen shows that the joint
essentially acts as a continuous joint if the distance between the rivets is small enough.
The conclusion of this work is that cohesive zone modeling is a powerful technique to
study the failure behavior of adhesively bonded joint with thick adhesive layer. The
preliminary study of rivet joints indicates a good prospect to use the method for this type
joints as well.
85
References
ABAQUS, General-Purpose Finite Element System, Hibbit, Karlson&Sorensen Inc., 100
Medway Street, Providence, RI., 1997.
Abaqus® Documentation (2011) Dassault Systèmes, Vélizy-Villacoublay
Afendi, M. and Teramoto, T. (2009) ‘Fracture toughness test of epoxy adhesive
dissimilar joint with various adhesive. Journal of Solid Mechanics and
Materials Engineering (JSME), 4 (7), pp. 999-1010, 2010.
Alfredsson, K.S. (2004) ‘On the instantaneous energy release rate of the end-notch
flexure adhesive joint specimen’, International Journal of Solids and
Structures 41:4787-4807.
Alfredsson, K.S., Gillespie, J.W., Bogetti, T.A., Carlsson, L.A. and Yiournas, A. (2008)
‘Flexure beams with interlayer- symmetric beams with orthotropic adherents’,
Journal of Mechanics of Materials and Structures 3, 45-62.
Andersson, T. and Stigh, U. (2004) ‘The stress-elongation relation for an adhesive layer
loaded in peel using equilibrium of energetic forces’, Int. J. of Solids and
Struct. 41:413-434.
Andersson, T. and Biel, A. (2006) ‘On the effective constitutive properties of a thin
adhesive layer loaded in peel’, Int. J. Frac. (2006) 141:227–246.
André, A., Haghani, R. and Biel, A. (2012) ‘Application of fracture mechanics to predict
the failure load of adhesive joints used to bond CFRP laminates to steel
members’, Journal of Construction and Buildings Materials.
Barenblatt, G.I. (1959) ‘The formation of Equilibrium cracks during brittle fracture’, J.
Appl. Math. Mech., vol. 23, no. 3, 1959, pp. 434-444.
Barenblatt, G.I. (1962) ‘The mathematical theory of equilibrium cracks in brittle
fracture’, Adv. Appl. Mech. 7:55-129.
Biel, A. (2005) ‘Constitutive behavior and fracture toughness of an adhesive layer’,
Thesis for the degree of licentiate in engineering, Chalmers University of
Technology.
Broek, D. (1982) Elementary engineering fracture mechanics, Springer: first edition.
Brockmann, W.,Geiss, P.L, Kligen, J. and Schröder, B. (2009) Adhesive Bonding:
Materials, Applications and Technology WILEY-VCH Verlag GmbH & Co.
KGaA, Weinheim, ISBN: 978-3-527-31898-8
86
Camanho, P. and Davila, C. (2002) ‘ Mixed-mode decohesion finite elements for the
simulation of delamination in composite materials’,NASA/TM-2002-211737.
Chandra, N., Li, H., Shet, C. and Ghonem, H. (2002) ‘Some issues in the application of
cohesive zone models for metal–ceramic interfaces’, Int. J. Solids Struct. 39,
2827-2855.
Choupani, N. (2008) ‘Mixed-mode cohesive fracture of adhesive joints: Experimental
and numerical studies’, Journal of Engineering Fracture Mechanics 75 4363-
4382.
Coulomb, C.A. (1776) ‘Remarque sur la rupture des corps’, Memoires presentes par
divers savants a l’Academie, vol. 7.
Cui, W. and Wisnom, M.R. (1993) ‘A combined stress-based and fracture-mechanics-
based model forpredicting delamination in composites’, Composites 24, 467-
474.
da Silva, L.F.M. and Campilho, R.D.S.G (2012) Advances in Numerical Modeling of
Adhesive joints , Springer, ISBN 978-3-642-23607-5.
Dugdale, D.S. (1960) ‘Yielding of steel sheets containing slits’, J. Mech. Phys. Solids,
100-104.
Eshelby, J.D. ‘The Force on Elastic Singularity’, Philos. Trans. Roy. Soc. London A, 244,
87 (1951).
Fleck, N A, Hutchinson, J. and Suo Z. (1991) ‘Crack path selection in a brittle adhesive
layer’, Int. J. of Solids and Structures, 27(13), pp 1683-1703.
Forman, R.G (1967) ‘Effect of plastic deformation on the strain energy release rate in a
centrally notched plate subjected to uniaxial tension’, ASME paper 65
WA/MET/9.
Gerken, J.M., Bennett, J. and Smith, F. (2001) ‘Numerical Simulation of the
Mechanically Coupled Cook-Off Experiment’, Journal of Materials and
Technology: Transaction of the American Society of Mechanical Engineers.
Griffith, A.A. (1920) ‘The phenomena of rupture and flow of solids’, Phil.Trans. Roy.
Soc. London.
Högberg, J.L. and Stigh, U. (2006) ‘Specimen proposals for mixed mode testing of
adhesive layer’, Engineering Fracture Mechanics 73, 2541-2587.
Högberg, J.L., Sørensen, B.F. and Stigh, U. (2007) ‘Constitutive behavior of mixed mode
loaded adhesive layer’, International Journal of Solids and Structures,
Volume 44, pp. 8335–8354
87
Inglis, C.E. (1913) ‘Stresses in plate due to presence of crack and sharp corners,
Proceedings-Institute of Naval Architect, 60.
Irwin, G.R. (1948) ‘Fracture Dynamics. In Fracturing of Metals’, 147-166. 1947 ASM
Symposium (Trans. ASM 40A), Cleveland.
Irwin, G. R. (1957) ‘Analysis of stresses and strains near the end of a crack traversing a
plate’, J. of Applied Mechanics, A.S.M.E., N. Y.
Kafkalidis, M.S. and Thouless, M.D. (2002) ‘The effects of geometry and material
properties on the fracture of single lap-shear joints’, Int. J. Solids Struct. 39,
4367-4383.
Kinloch, A.J. (1987) Adhesion and Adhesives: Science and Technology (Chapman and
Hall, London).
Kirsch, G., (1898) ‘Die Theorie der Elastizität und di Bedürfnisse der Festigkeitslehre’,
Zeitschrift de Vereines deutscher Ingenieure 42 (28): 797–807.
Klarbring, A. (1991) ‘Derivation of the model of adhesively bonded joints by the
asymptotic expansion method’, Int. J. of Engineering Science 29,493-512.
Leffler, K., Alfredsson, K.S. and Stigh, U. (2007) ‘Shear behavior of adhesive layers’,
Int. J. of Solids and Struct. 44:530-545.
Mi, Y., Crisfield, M.A., Davies, G.A.O. and Hellweg, H.B. (1998) ‘Progressive
delamination using interface elements’, J. Compos. Mater. 32, 1246-1272.
Needleman, A. (1987) ‘A Continuum Model for Void Nucleation by Inclusion
Debonding’, Journal of Applied Mechanics 1987; 54: 525-531.
Olsson, P. and Stigh, U. (1989) ‘On the determination of the constitutive properties of
thin interphase layers an exact inverse solution’, Int. J. of Fract. Mec.
41(4):R71-R76.
Pinto, A.M.G., Magalhães, A.G., Campilho, R.D.S.G., de Moura, M.F.S.F. and Baptista,
A.P.M. (2009) ‘Single lap joints of similar and dissimilar adherends bonded
with an acrylic adhesive’, J. Adhes. 85,351-376.
Razvan, R. (2009) ‘ Some remarks on the history of fracture mechanics’, Proceedings of
the 3rd International Conference on Applied Mathematics, Simulation,
Modeling, Circuits, Systems and Signals Pages 122-131.
Rice, J.R. (1968) ‘A path independent integral and the approximative analysis of strain
concentration by notches and cracks’, ASME J. App. Mech., 88, 379-386.
88
Robinson, J.N (1977) ‘An experimental investigation of the effect of specimen type on
the crack tip opening displacement and J-integral fracture criteria’, Int. J. of
fracture, 12 pp.723 737.
Stigh, U. (1987) ‘Initiation and growth of an interface crack. Mechanical behavior of
adhesive joints’, Pluralis, Paris, France, pp. 237-248
Sun, C.T., Jin, Z.H. (2011) Fracture Mechanics, Elsevier, ISBN 978-0-12-385001-01.
Sørensen, B.F. (2002) ‘Cohesive law and notch sensitivity of adhesive joints’, Acta
Mater. 50, 1053-1061.
Sørensen, B.F. and Jacobsen, T.K. (2003) ‘Determination of cohesive laws by the J
integral approach’, Eng. Fract. Mech. 70, 1841-1858.
Sørensen, B.F., Kirkegaard, P. (2006) ‘Determination of mixed mode cohesive laws’,
Eng. Fract. Mech. 73, 2642–2661
Volkersen, O. (1938) ‘Die nietkraftverteilung in zubeanspruchten nietverbindungen mit
konstanten laschenquerschnitten’, Luftfahrtforschung 15, 41-47.
Weinberger, C., Cai, W. and Barnett, D. (2005) Lecture Notes – Elasticity of Microscopic
Structures, Stanford University.
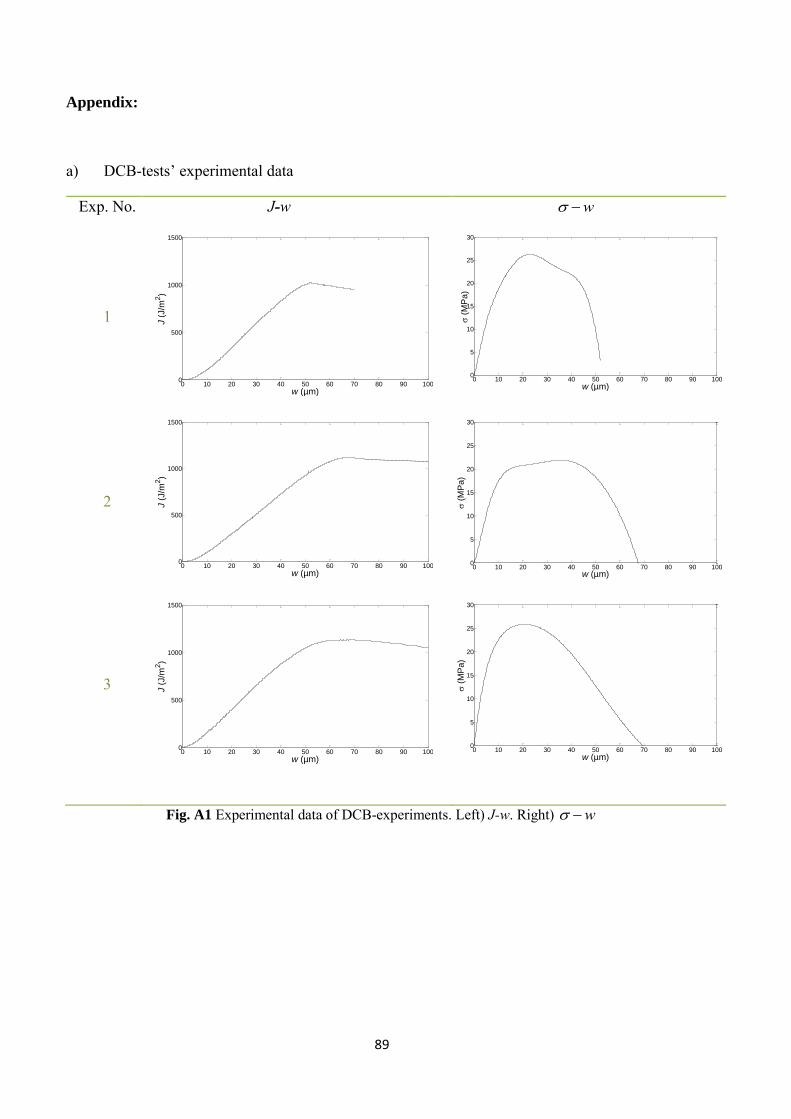
89
Appendix:
a) DCB-tests’ experimental data
Exp. No. J-w w
1
2
3
Fig. A1 Experimental data of DCB-experiments. Left) J-w. Right) w
0 10 20 30 40 50 60 70 80 90 1000
500
1000
1500
w (µm)
J (
J/m
2)
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
w (µm)
(
MP
a)
0 10 20 30 40 50 60 70 80 90 1000
500
1000
1500
w (µm)
J (
J/m
2)
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
w (µm)
(
MP
a)
0 10 20 30 40 50 60 70 80 90 1000
500
1000
1500
w (µm)
J (
J/m
2)
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
w (µm)
(
MP
a)
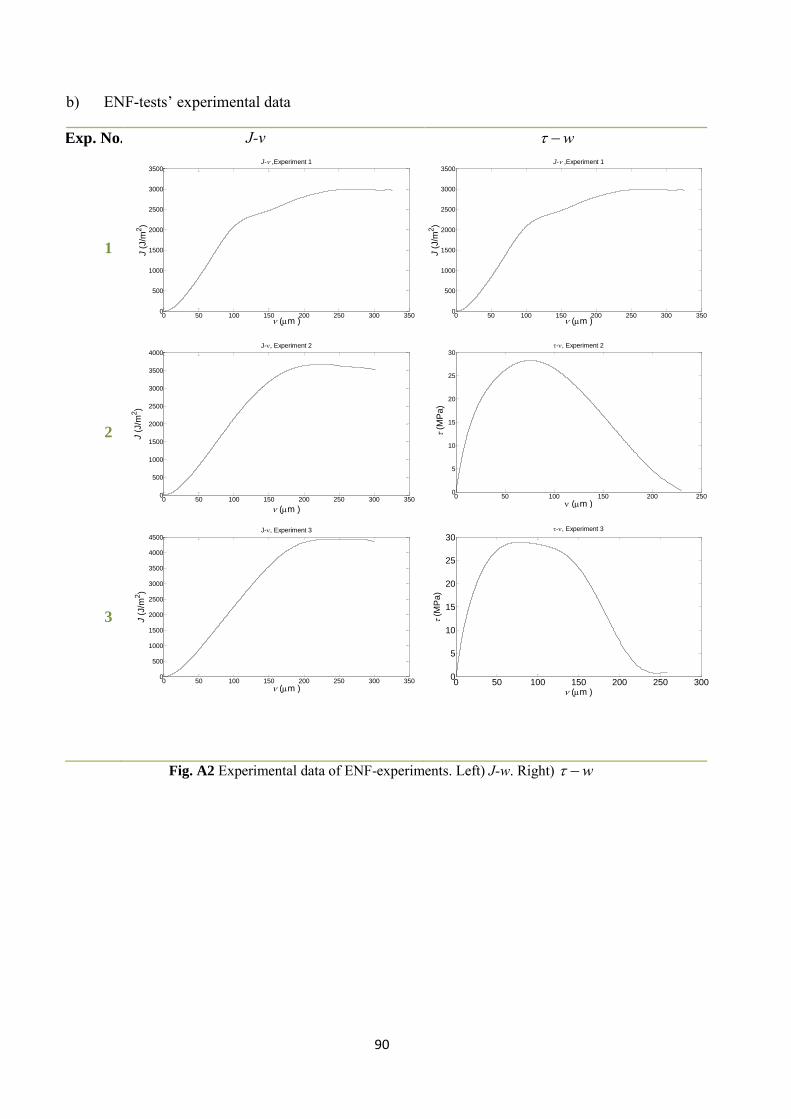
90
b) ENF-tests’ experimental data
Exp. No. J-v w
1
2
3
Fig. A2 Experimental data of ENF-experiments. Left) J-w. Right) w
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500
3000
3500J- ,Experiment 1
(m )
J (
J/m
2)
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500
3000
3500J- ,Experiment 1
(m )
J (
J/m
2)
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500
3000
3500
4000J-, Experiment 2
(m )
J (
J/m
2)
0 50 100 150 200 2500
5
10
15
20
25
30-, Experiment 2
(m )
(M
Pa
)
0 50 100 150 200 250 300 3500
500
1000
1500
2000
2500
3000
3500
4000
4500J-, Experiment 3
(m )
J (
J/m
2)
0 50 100 150 200 250 3000
5
10
15
20
25
30-, Experiment 3
(m )
(M
Pa)
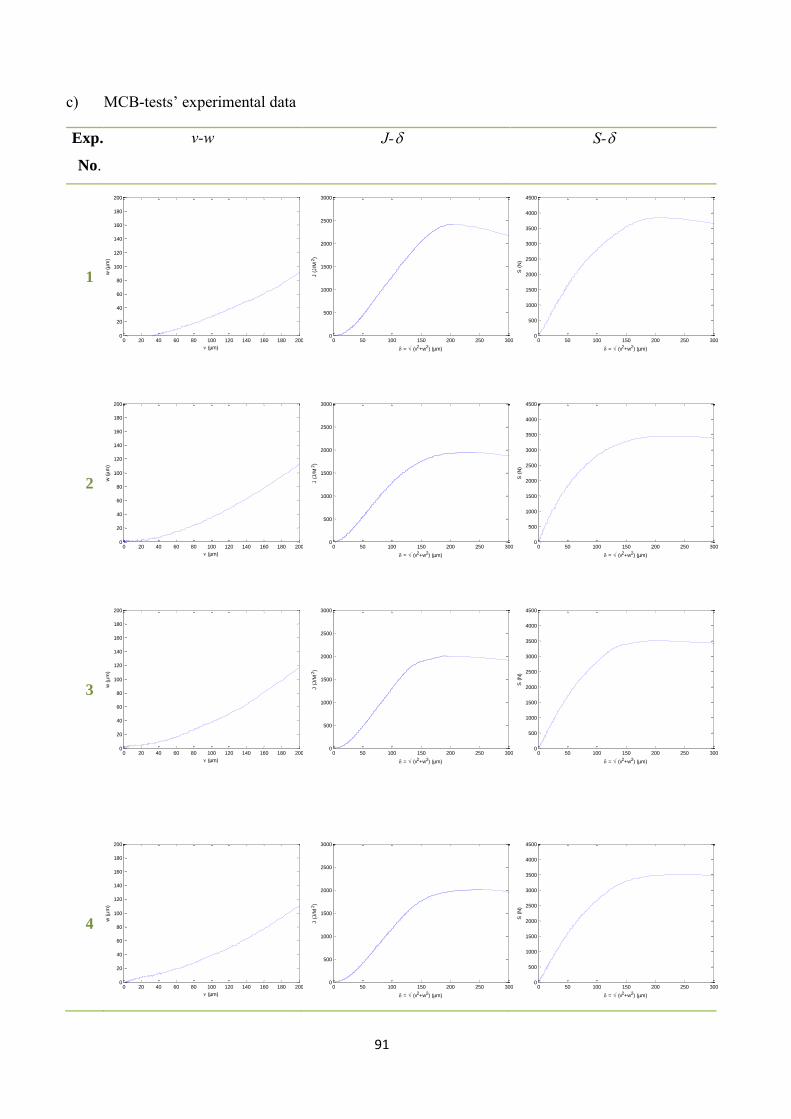
91
c) MCB-tests’ experimental data
Exp..
No.
v-w J- S-
1
2
3
4
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
(µm)
w (
µm
)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
= (v2+w2) (µm)
J (
J/M
2)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
= (v2+w2) (µm)
S (
N)
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
(µm)
w (
µm
)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
= (v2+w2) (µm)
J (
J/M
2)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
= (v2+w2) (µm)
S (
N)
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
(µm)
w (
µm
)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
= (v2+w2) (µm)
J (
J/M
2)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
= (v2+w2) (µm)
S (
N)
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
(µm)
w (
µm
)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
= (v2+w2) (µm)
J (
J/M
2)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
= (v2+w2) (µm)
S (
N)
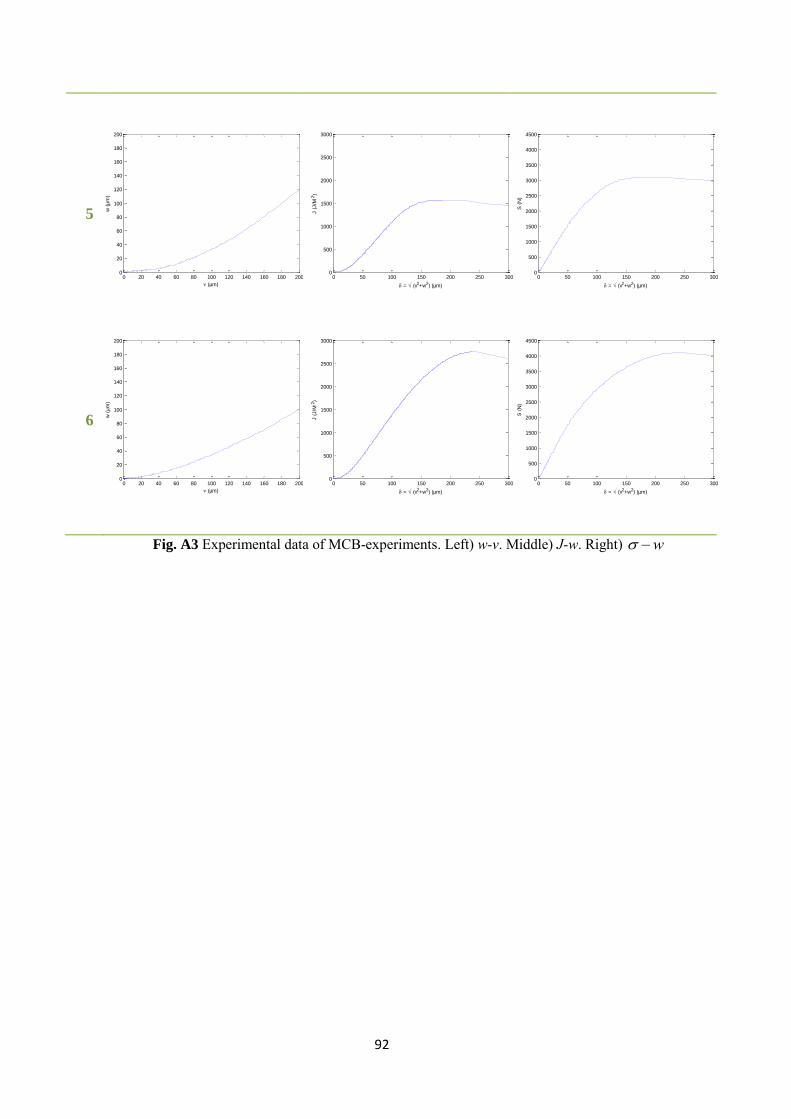
92
5
6
Fig. A3 Experimental data of MCB-experiments. Left) w-v. Middle) J-w. Right) w
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
(µm)
w (
µm
)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
= (v2+w2) (µm)
J (
J/M
2)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
= (v2+w2) (µm)
S (
N)
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
(µm)
w (
µm
)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
= (v2+w2) (µm)
J (
J/M
2)
0 50 100 150 200 250 3000
500
1000
1500
2000
2500
3000
3500
4000
4500
= (v2+w2) (µm)
S (
N)
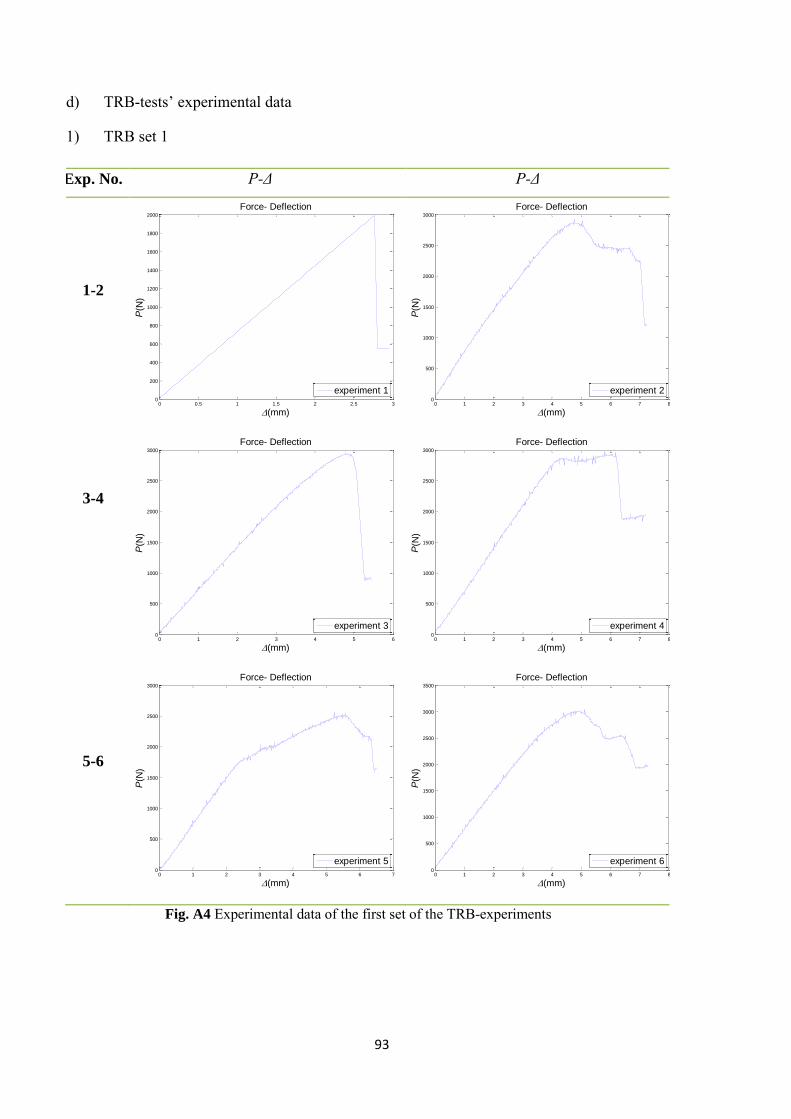
93
d) TRB-tests’ experimental data
1) TRB set 1
Exp. No. P-Δ P-Δ
1-2
3-4
5-6
Fig. A4 Experimental data of the first set of the TRB-experiments
0 0.5 1 1.5 2 2.5 30
200
400
600
800
1000
1200
1400
1600
1800
2000
Force- Deflection
(mm)
P(N
)
experiment 1
0 1 2 3 4 5 6 7 80
500
1000
1500
2000
2500
3000
Force- Deflection
(mm)P
(N)
experiment 2
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
Force- Deflection
(mm)
P(N
)
experiment 3
0 1 2 3 4 5 6 7 80
500
1000
1500
2000
2500
3000
Force- Deflection
(mm)
P(N
)
experiment 4
0 1 2 3 4 5 6 70
500
1000
1500
2000
2500
3000
Force- Deflection
(mm)
P(N
)
experiment 5
0 1 2 3 4 5 6 7 80
500
1000
1500
2000
2500
3000
3500
Force- Deflection
(mm)
P(N
)
experiment 6
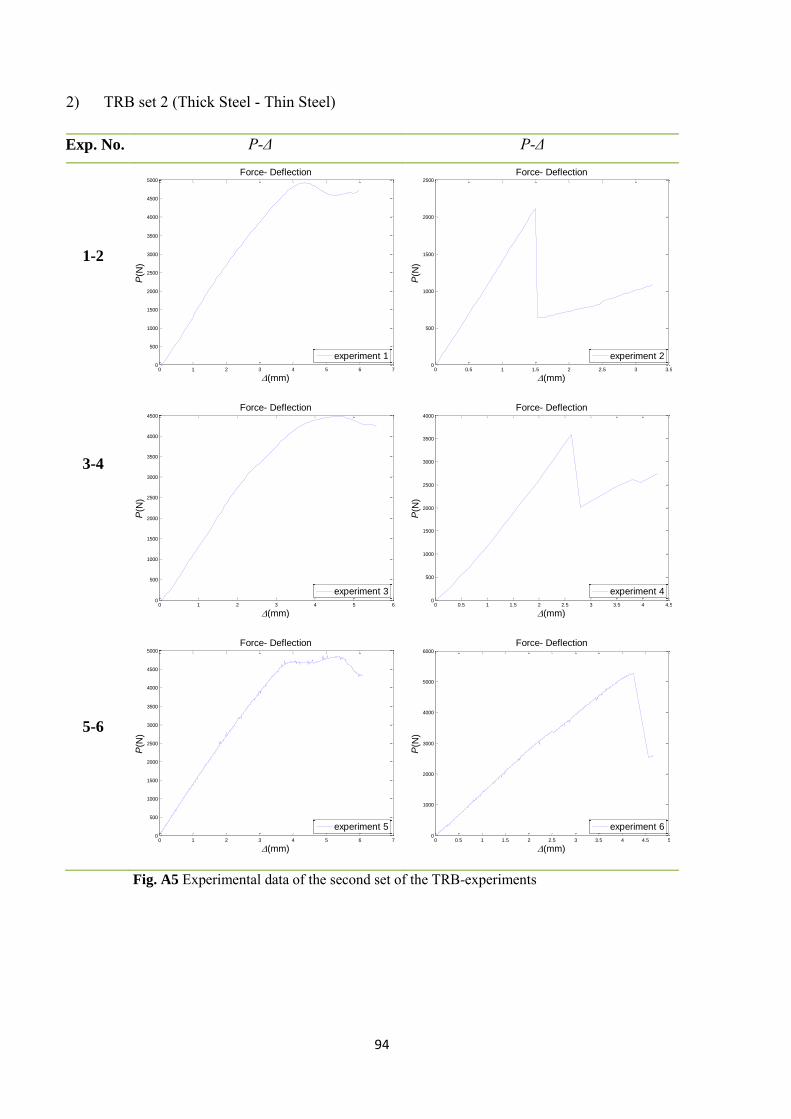
94
2) TRB set 2 (Thick Steel - Thin Steel)
Exp. No. P-Δ P-Δ
1-2
3-4
5-6
Fig. A5 Experimental data of the second set of the TRB-experiments
0 1 2 3 4 5 6 70
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Force- Deflection
(mm)
P(N
)
experiment 1
0 0.5 1 1.5 2 2.5 3 3.50
500
1000
1500
2000
2500
Force- Deflection
(mm)
P(N
)
experiment 2
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
4000
4500
Force- Deflection
(mm)
P(N
)
experiment 3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
500
1000
1500
2000
2500
3000
3500
4000
Force- Deflection
(mm)
P(N
)
experiment 4
0 1 2 3 4 5 6 70
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
Force- Deflection
(mm)
P(N
)
experiment 5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
1000
2000
3000
4000
5000
6000
Force- Deflection
(mm)
P(N
)
experiment 6
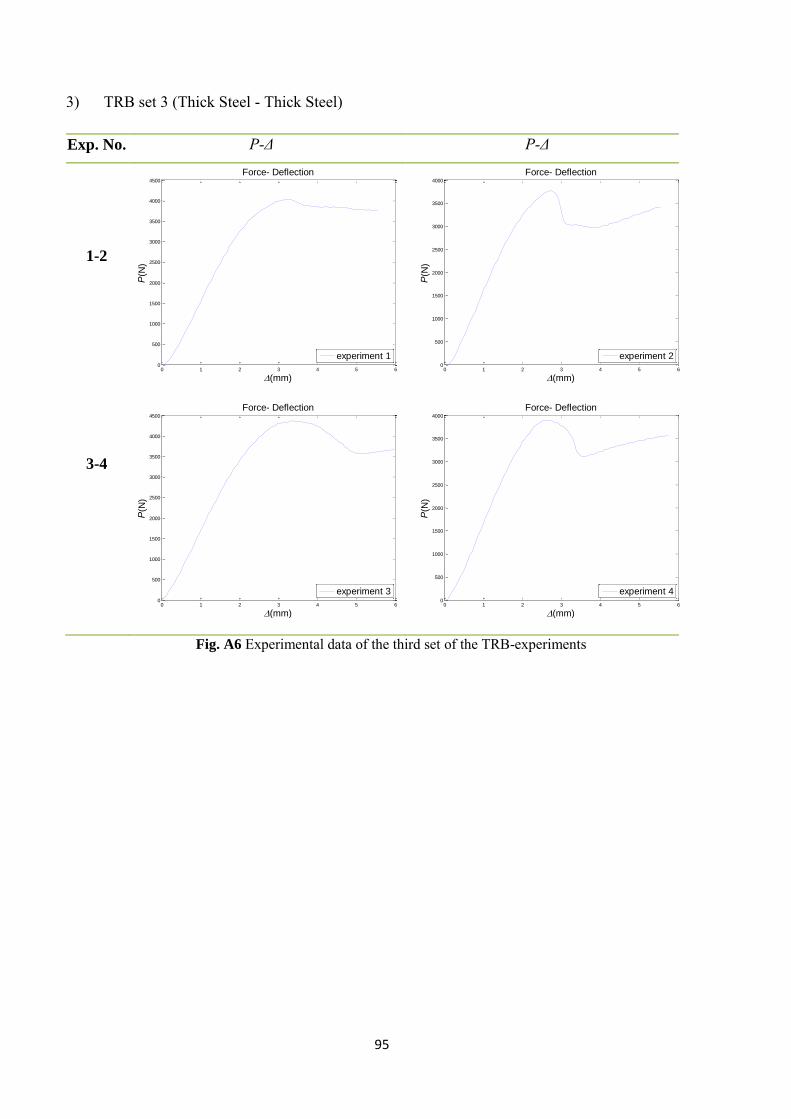
95
3) TRB set 3 (Thick Steel - Thick Steel)
Exp. No. P-Δ P-Δ
1-2
3-4
Fig. A6 Experimental data of the third set of the TRB-experiments
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
4000
4500
Force- Deflection
(mm)
P(N
)
experiment 1
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
4000
Force- Deflection
(mm)
P(N
)
experiment 2
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
4000
4500
Force- Deflection
(mm)
P(N
)
experiment 3
0 1 2 3 4 5 60
500
1000
1500
2000
2500
3000
3500
4000
Force- Deflection
(mm)
P(N
)
experiment 4
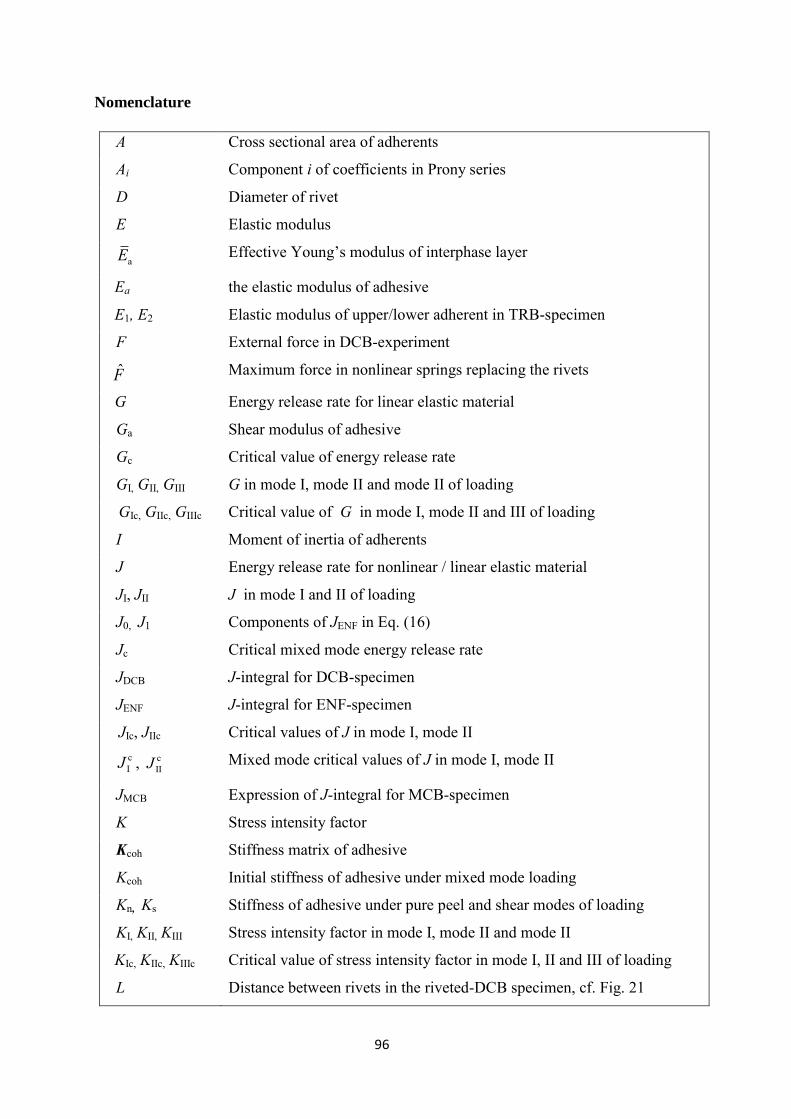
96
Nomenclature
A Cross sectional area of adherents
Ai Component i of coefficients in Prony series
D Diameter of rivet
E Elastic modulus
aE Effective Young’s modulus of interphase layer
Ea the elastic modulus of adhesive
E1, E2 Elastic modulus of upper/lower adherent in TRB-specimen
F External force in DCB-experiment
F Maximum force in nonlinear springs replacing the rivets
G Energy release rate for linear elastic material
Ga Shear modulus of adhesive
Gc Critical value of energy release rate
GI, GII, GIII G in mode I, mode II and mode II of loading
GIc, GIIc, GIIIc Critical value of G in mode I, mode II and III of loading
I Moment of inertia of adherents
J Energy release rate for nonlinear / linear elastic material
JI, JII J in mode I and II of loading
J0, J1 Components of JENF in Eq. (16)
Jc Critical mixed mode energy release rate
JDCB J-integral for DCB-specimen
JENF J-integral for ENF-specimen
JIc, JIIc Critical values of J in mode I, mode II
cIJ , c
IIJ Mixed mode critical values of J in mode I, mode II
JMCB Expression of J-integral for MCB-specimen
K Stress intensity factor
Kcoh Stiffness matrix of adhesive
Kcoh Initial stiffness of adhesive under mixed mode loading
Kn, Ks Stiffness of adhesive under pure peel and shear modes of loading
KI, KII, KIII Stress intensity factor in mode I, mode II and mode II
KIc, KIIc, KIIIc Critical value of stress intensity factor in mode I, II and III of loading
L Distance between rivets in the riveted-DCB specimen, cf. Fig. 21
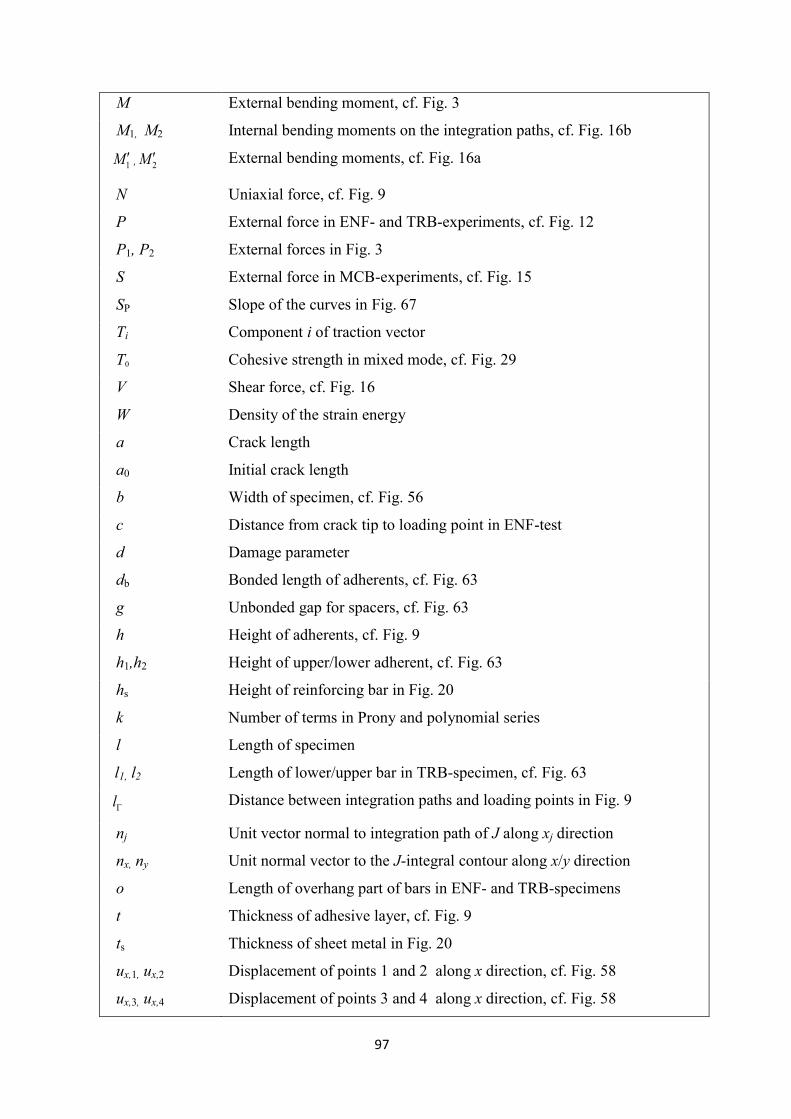
97
M External bending moment, cf. Fig. 3
M1, M2 Internal bending moments on the integration paths, cf. Fig. 16b
1M , 2M External bending moments, cf. Fig. 16a
N Uniaxial force, cf. Fig. 9
P External force in ENF- and TRB-experiments, cf. Fig. 12
P1, P2 External forces in Fig. 3
S External force in MCB-experiments, cf. Fig. 15
SP Slope of the curves in Fig. 67
Ti Component i of traction vector
T0 Cohesive strength in mixed mode, cf. Fig. 29
V Shear force, cf. Fig. 16
W Density of the strain energy
a Crack length
a0 Initial crack length
b Width of specimen, cf. Fig. 56
c Distance from crack tip to loading point in ENF-test
d Damage parameter
db Bonded length of adherents, cf. Fig. 63
g Unbonded gap for spacers, cf. Fig. 63
h Height of adherents, cf. Fig. 9
h1,h2 Height of upper/lower adherent, cf. Fig. 63
hs Height of reinforcing bar in Fig. 20
k Number of terms in Prony and polynomial series
l Length of specimen
l1, l2 Length of lower/upper bar in TRB-specimen, cf. Fig. 63
l Distance between integration paths and loading points in Fig. 9
nj Unit vector normal to integration path of J along xj direction
nx, ny Unit normal vector to the J-integral contour along x/y direction
o Length of overhang part of bars in ENF- and TRB-specimens
t Thickness of adhesive layer, cf. Fig. 9
ts Thickness of sheet metal in Fig. 20
ux,1, ux,2 Displacement of points 1 and 2 along x direction, cf. Fig. 58
ux,3, ux,4 Displacement of points 3 and 4 along x direction, cf. Fig. 58
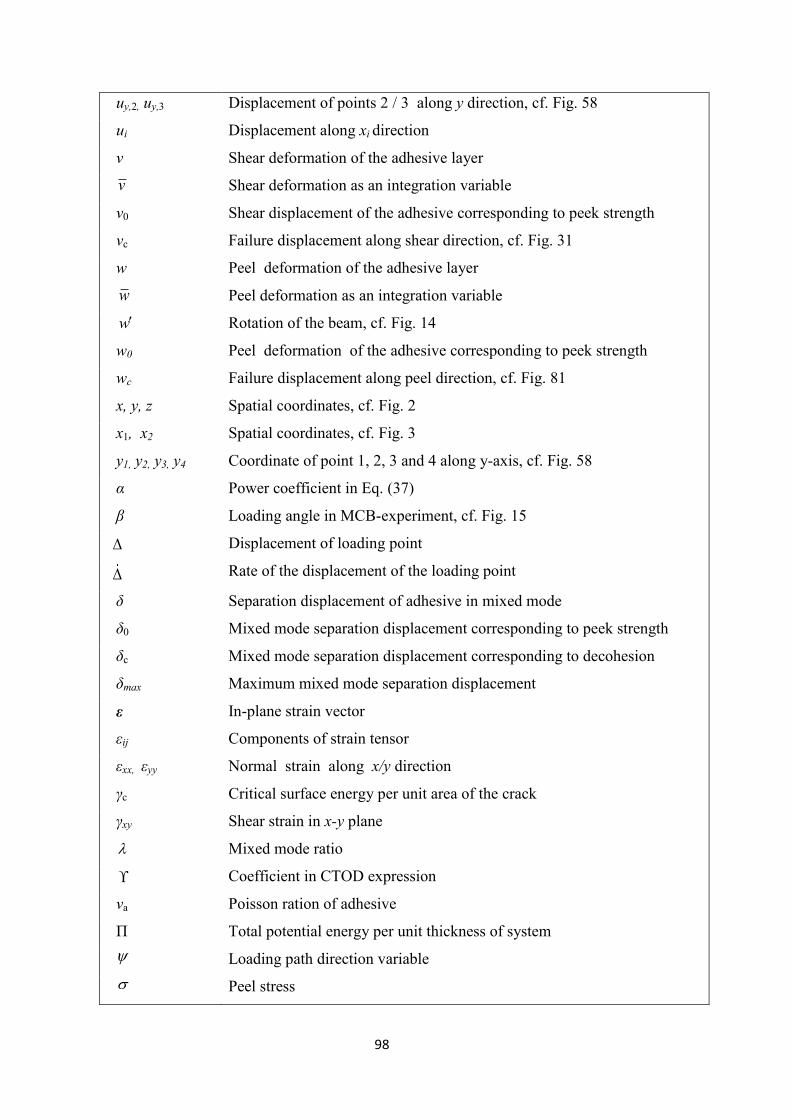
98
uy,2, uy,3 Displacement of points 2 / 3 along y direction, cf. Fig. 58
ui Displacement along xi direction
v Shear deformation of the adhesive layer
v Shear deformation as an integration variable
v0 Shear displacement of the adhesive corresponding to peek strength
vc Failure displacement along shear direction, cf. Fig. 31
w Peel deformation of the adhesive layer
w Peel deformation as an integration variable
w Rotation of the beam, cf. Fig. 14
w0 Peel deformation of the adhesive corresponding to peek strength
wc Failure displacement along peel direction, cf. Fig. 81
x, y, z Spatial coordinates, cf. Fig. 2
x1, x2 Spatial coordinates, cf. Fig. 3
y1, y2, y3, y4 Coordinate of point 1, 2, 3 and 4 along y-axis, cf. Fig. 58
α Power coefficient in Eq. (37)
β Loading angle in MCB-experiment, cf. Fig. 15
Displacement of loading point
Rate of the displacement of the loading point
δ Separation displacement of adhesive in mixed mode
δ0 Mixed mode separation displacement corresponding to peek strength
δc Mixed mode separation displacement corresponding to decohesion
δmax Maximum mixed mode separation displacement
ε In-plane strain vector
εij Components of strain tensor
εxx, εyy Normal strain along x/y direction
γc Critical surface energy per unit area of the crack
γxy Shear strain in x-y plane
Mixed mode ratio
Coefficient in CTOD expression
va Poisson ration of adhesive
Π Total potential energy per unit thickness of system Loading path direction variable
Peel stress
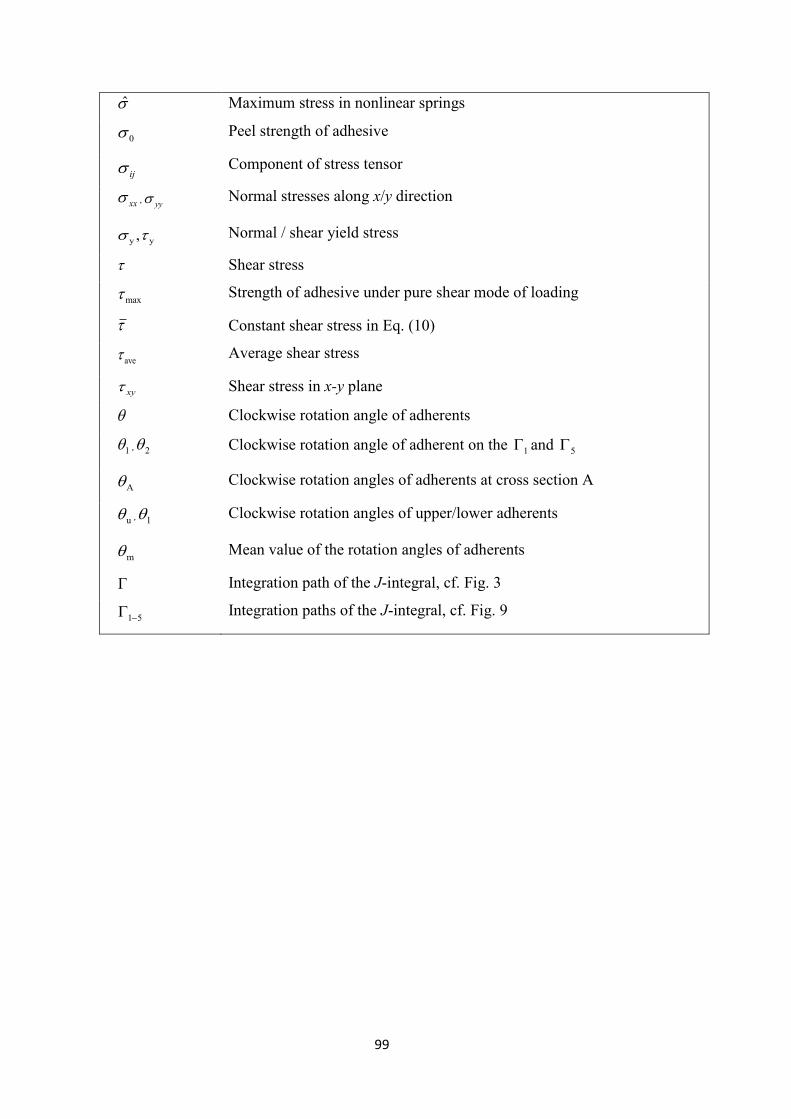
99
Maximum stress in nonlinear springs
0 Peel strength of adhesive
ij Component of stress tensor
xx , yy Normal stresses along x/y direction
y y, Normal / shear yield stress
Shear stress
max Strength of adhesive under pure shear mode of loading
Constant shear stress in Eq. (10)
ave Average shear stress
xy Shear stress in x-y plane
Clockwise rotation angle of adherents
1 , 2 Clockwise rotation angle of adherent on the 1 and 5
A Clockwise rotation angles of adherents at cross section A
u , l Clockwise rotation angles of upper/lower adherents
m Mean value of the rotation angles of adherents
Integration path of the J-integral, cf. Fig. 3
1 5 Integration paths of the J-integral, cf. Fig. 9


















