An Objective Evaluation of the Comfort during a Gearshift HIL...
44
Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva Transmissions and driveline dynamics An Objective Evaluation of the Comfort during a Gearshift HIL test bench Prof. Mauro Velardocchia [email protected] Laboratorio di Meccanica del Veicolo e Sistemi di Sicurezza Attiva Dipartimento di Meccanica Politecnico di Torino
Transcript of An Objective Evaluation of the Comfort during a Gearshift HIL...

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Transmissions and driveline dynamicsAn Objective Evaluation of the Comfort during a Gearshift
HIL test bench
Prof. Mauro [email protected]
Laboratorio di Meccanica del Veicolo e Sistemi di Sicurezza Attiva
Dipartimento di Meccanica Politecnico di Torino

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
IndexIndex
Objective Evaluation of the Comfort during a Gearshift
Transmission and driveline dynamics
Hardware-in-the-loop (HIL) transmission and driveline test bench

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Objective Evaluation of the Comfort during a Gearshift -Introduction
Legend1 TCU2 Actuation Unit3 ECU4 Throttle Valve 5 Display Inserted Gear Ratio6/7 Buttons UP/DOWN8 Button City Mode9 Lever UP/DOWN10 Gas Pedal Sensor11 Brake Pedal Sensor
No Clutch Pedal
How can we evaluate the performance of these systems?
Driveline technology has achieved progress due to the introduction of automated manual transmission systems (based e.g. on the electro-mechanical or electro-hydraulic actuation of the clutch and the synchronizers, or on Dual Clutch systems, etc.)

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Outline
• Experimental Tests
• Correlation between Subjective and Objective Evaluations: Definition of Indexes
• Development of Models – Automated Computation of the Indexes
• Conclusions
• Gearshift Quality Evaluation: State-of-the-Art

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Gearshift Evaluation: State of the Art
Subjective Parameters
SAE SUBJECTIVE EVALUATION CHART (CLIENT ORIENTED)
NOT ACCEPTABLE ACCEPTABLEEvaluation Very Poor Poor Less than
mediocre Mediocre Limit / acceptable Acceptable Quite
good Good Very good Excellent
Kind of clients All clients Middle clients Critical clients Expert clients
Perceptibility Very High High Moderate Small Very small Null
Sensation Untolerable Significant annoyance Annoyance Slight
annoyance Small disturbance Little disturbance No disturbance
Reaction Refusal Protest Complaint Acceptance Appreciation EnthusiasmAlphanumerical
scale Score 1 2 3 4 5 6 7 8 9 10
Necessary correctionsImmediate and
radical intervention
Remedial intervention To be improved It requires attention O. K.
Clie
nt's
poin
t of v
iew

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Gearshift Evaluation: State of the Art
•Acceleration Discontinuity (AD), which corresponds to the importance of the feeling of braking and consequent pitch motion that the passengers of the car perceive during the gear shift. A large acceleration discontinuity corresponds to an uncomfortable gearshift. It is significant in the case of a gearshift between low gears in conditions of a fully open gas throttle valve
•Acceleration Hole (AH), which corresponds to the duration of thephase in which traction is absent. It should express the perceived rate of the gearshift process. A good gearshift should be characterized by a low Acceleration Hole
•Upshift Sportiness (US), which corresponds to the perception of a fast variation of the inertial forces during the upshift
•A comfortable gearshift should be characterized by a good performance in terms of AD and AH
Subjective Parameters

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Gearshift Evaluation: State of the Art
ObjectiveParameters

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
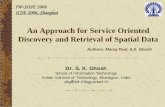
Experimental Tests
Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
gas pedal positiongas pedal position gear n.gear n.
[%][%]
1 1 --> 2> 2
20, 4020, 40 2 2 --> 3> 3
60, 10060, 100 3 3 --> 4> 4
4 4 --> 5> 5
gas pedal positiongas pedal position gear n.gear n.
[%][%]
1 1 --> 2> 2
20, 4020, 40 2 2 --> 3> 3
60, 10060, 100 3 3 --> 4> 4
4 4 --> 5> 5
Manual Mode: sequence of upshifts
Automated Mode: sequenceof upshifts
gas pedal positiongas pedal position gear n.gear n.
[%][%]
100100 5 5 --> 3> 3
4 4 --> 2> 2
Auto Kick down: sequence of double downshifts in the automated mode, withoutusing brakes
gas pedal positiongas pedal position gear n.gear n.
[%][%]
100100 5 5 --> 4> 4
4 4 --> 3> 3
Downshifts during Traction: sequence of downshifts in the manual mode, without using brakes
Experimental Tests

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
20 40 60 100
1->22->3
3->44->5
3
4
5
6
7
8
9
Score
Gas Pedal [%]
Manual Up - Test Driver
1->2
2->3
3->4
4->5
The performance decays at low gear ratios and significant gas pedal inputs
20 40 60 100
1->2
3->43
4
5
6
7
8
9
Score
Gas Pedal [%]
Manual Up - Front Passenger
1->2
2->3
3->4
4->5
This statement is true for the professional test driver, the front passenger (a vehicle engineer) and the rear passenger (a person without any specific knowledge about AMT)
ExperimentalExperimental TestsTests: : ResultsResults

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Clutch Torque
Engine Torque
SynchronizerActuator
1st phase: torque release (clutchdisengagement)2nd phase: synchronization3rd phase: torque increase (clutch re-engagement)
Experimental Tests: Results

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Engine Speed
Clutch Speed
On the basis of the parameters of the driveline,it is not straightforward to distinguishbetween a comfortable and an uncomfortablegearshift
Experimental Tests: Results

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
A more evident proof of gearshiftquality is given by the diagrams of longitudinal acceleration: the qualityof the gearshift is directly perceived in terms of vehice longitudinal dynamics
The difference between a comfortable and anuncomfortable gearshift can be measured AFTER and NOT DURING the gearshift
Experimental Tests: Results

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
There is not any significant change from the viewpoint of the peak values and also of the pitch rate during the first part of the maneuver
The difference is significant after the gearshift!
Experimental Tests: Results

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
The Experimental Tests: Results of the Correlation
The score is higher if this rate is low (index 1)
The score is higher if these values are low (index 2)
The score is higher if this distance is short (index 3)
The score is higher if the sum of these three times is low (index 4)
The score is higher if area A is small(index 5)

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
The Experimental Tests: Results of the Correlation•The statistical significance of the physical parameters was evaluated through Fisher’s test
•Indexes 1-4 demonstratea good correlation for a fixed value of gas pedalactuation
•Index 5 (based on area A) is the only index whichdemonstrates a goodcorrelation whenconsidering the experimental data alltogether
•The statistical correlation was found (the detailed statistics related to this work will be the subject of a future paper)
Index 3
Index 5

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
The Model
Engine
Clutch
Synchronizer
Gearbox-differential
Axle shaft
Tyre/Wheel
Vehicle Inertia
•The model considers also vehicle pitchand vertical motions and suspensionsanti-dive/anti-lift dynamics

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
The The ExperimentalExperimental TestsTests: : ResultsResults
Validation of vehicle longitudinaldynamics
The model permits a precise evaluation of the indexes 1-5 previously defined

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
The Experimental Tests – Road Tests
The correspondence is good alsofrom the point of view of all the main parameters, like pitchangle and suspensions dynamics
Current research is devoted tounderstanding the effect of engine mounting system dynamics

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Conclusions
• The comfort of the gearshift can be assessed by considering vehicle parameters (more than driveline parameters), in particular the time history of vehicle acceleration and the duration of the maneuver
• The correlation between the physical parameters and the subjective parameters permits to define an index (index 5 in this presentation), valid in all the considered maneuvers
• Jerk, a parameter usually considered fundamental, does not appear so important in a correlation with subjective scores
• Vehicle longitudinal acceleration, pitch angle and the duration of the gearshift are useful parameters when comparing gear changes carried out with the same boundary conditions (e.g. gas pedal travel)
• This index can be automatically computed by the conceived vehicle and driveline model, to carry out an automated analysis for the optimization of vehicle and driveline parameters

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Dinamica di sistemi di trasmissione automobilisticiIn ordine di complessità crescente, una trasmissione può essere modellizzata con un
modello dinamico:• rigido• con comportamento elastico dei semiassi• con comportamento elastico dei semiassi e del parastrappi• con studio del comportamento dei pneumatici• con beccheggio della massa sospesa del motore• con beccheggio della massa sospesa motore e della massa sospesa veicolo• con beccheggio e con gli scuotimenti verticali delle masse sospese• con beccheggio e con gli scuotimenti verticali delle masse sospese e scuotimenti
verticali delle masse non sospese• con beccheggio e scuotimento verticale delle masse sospese con percentuale Anti - Lift• con masse sospese e non sospese con percentuale di Anti – Lift.• con rotazione motore intorno al suo centro di istantanea rotazione reale• con dinamica del veicolo con influenza della coppia resistente di rotolamento, del
momento di inerzia delle ruote e della coppia resistente aerodinamica• con dinamica del veicolo con influenza della pendenza longitudinale della strada• con dinamica del veicolo con studio lineare della sospensione motore e modello della
dinamica della trasmissione• con dinamica del veicolo con studio Lagrangiano della sospensione motore

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Dinamica di una trasmissione Dinamica di una trasmissione

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Dinamica di una trasmissione (esempio a un grado di libertDinamica di una trasmissione (esempio a un grado di libertàà))
Componenti della trasmissione: albero motore, volano, disco frizione, albero primario del cambio e sincronizzatori, albero secondario del cambio, differenziale, semiassi, mozzi ruota e pneumatici
Frizione chiusa – marcia innestataUn solo grado di libertà. La trasmissione della coppia motrice avviene rigidamente dall’albero motore fino alle ruote
L’equazione matematica che descrive il modello in questa configurazione di funzionamento ad un grado di libertà è
( )( ) qresqmotfssfsswfssffdiscopsmotfssfssv TTiiJJiJJJiiJ −=+++++ ηηϑηηη &&222

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
( ) ( )wffssfss
dwf
fssfss
dqmotfdiscofssmotfsspsfssss
ssss
ff
fssfss iid
iikTJiiJiiJiiJ
ii
Jii
ϑϑηη
ϑϑηη
ϑηηη
&&&& −−−−=⎟⎟⎠
⎞⎜⎜⎝
⎛++++1
Modello con rigidezza semiassiModello con rigidezza semiassi
[ ]{ } [ ]{ } [ ]{ } [ ]{ }fTKDM =++ ϑϑϑ &&&
( ) ( ) qreswfdwfdwv TdkJ −−+−= ϑϑϑϑϑ &&&&
qres
qmot
w
f
w
f
w
f
TT
TKDM =++ϑϑ
ϑϑ
θϑ
&
&
&&
&&
[ ] [ ]( ) 0det 2 =− MK λ ⎟⎟⎠
⎞⎜⎜⎝
⎛ += 12
21
2 Ji
JJJ
kd
ηλ

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Modello dinamico della trasmissione con studio del comportamento dei pneumatici
Il modello introduce l’influenza del pneumatico sui modi di vibrare della trasmissione.
Durante i nostri studi si è visto che i modelli precedentemente studiati in fase di simulazione presentano delle vibrazioni non coerenti con la realtà a causa delle semplificazioni che si effettuano abitualmente in merito all’effetto del modello del pneumatico sulla dinamica della trasmissione
Uno studio importante sulla modellizzazione dei pneumatici è stato effettuato, come ben noto, da H.B.Pacejka

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Dinamica longitudinale di un veicoloDinamica longitudinale di un veicolo
msm
msm
msmmsv
Fr
∑=
−−−Δ−Δ−=2
1izimRmFrzbRzbFrmsvsv FFFFFZm &&
( )( ) ( ) ( )332211
2211
zGmsmGmsvxzGmsmGmsvxzGmsmGmsvx
zmsvxzmsvxmRsmFrsGtotGmsvaermsvmsv
lHHFlHHFlHHFFlFlFbFaHHFMJ
−+−−+−−++++−+−+= ϑϑ&&
∑=
=3
1iximsmsm FXm &&
∑=
=2
1iyimsmsm FYm &&
∑=
=2
1izimsmsm FZm &&
∑∑==
+−=2
1
2
1 iziyi
iyizimsmxmsm FlFlJ ϕ&&
di
zixii
xizimsmymsm TFlFlJ −−= ∑∑==
2
1
3
1ϑ&&
∑∑==
+−=2
1
3
1 iyixi
ixiyimsmzmsm FlFlJ ψ&&
zbFrmFrpFrnsFrmnsFr FFFmZ Δ++−=&&
zbRmRpRnsRmnsR FFFmZ Δ++−=&&
Massa sospesa del veicoloMassa sospesa del motoreMasse non sospese

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Prova di tiro Prova di tiro –– rilascio. Modelli linearirilascio. Modelli lineari

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
PROVE DI CAMBIO MARCIA PROVE DI CAMBIO MARCIA

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
VALIDAZIONE MODELLO SIMULINK CON DATI SPERIMENTALIVALIDAZIONE MODELLO SIMULINK CON DATI SPERIMENTALI

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Conclusioni analisi dinamica di una trasmissione
Il modello più semplice e efficace per descrivere il comportamento dinamico di una trasmissione deve considerare almeno l’elasticità dei semiassi e le caratteristiche elastiche e smorzanti dei pneumatico
La validazione sperimentale di modelli che abbiano almeno questo grado di complessità ne conferma l’efficacia nel ricostruire la dinamica della trasmissione e del veicolo duranteun cambio marcia
Sono stati presentati alcuni parametri di una trasmissione che incidono in misura apprezzabile sul comportamento dinamico di un cambio marcia

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
SperimentazioneSperimentazione con con bancobanco provaprova trasmissionitrasmissioni HILHIL
Layout del Banco TrasmissioniCambio marcia robotizzato Ruolo funzionale
Schema Hardware-in-the-loop (HIL) del sistemaModello Matlab/Simulink
Dinamica veicoloLogica cambio marcia
Modello LabViewProcedura SIT
Sperimentazione a bancoProva in condizioni stazionarieProva di cambio marciaProve di fault analysis

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Layout del banco: Layout del banco: Ruolo FunzionaleRuolo Funzionale
BancoTrasmissioni
Trasmissione meccanicaTrasmissione meccanica
CoppiaCoppia Coppia
Veicolo
Vel
Forza
Vel
Forza
Resist. aerodin
Corrispondenza banco trasmissioni - Ruolo funionaleMotore
TVO
Motore sorgente(comandato in coppia)
RPM
RPM
PacejkaPacejka
RPM
Ruota motrice DXRuota motrice SX
RPM
Forza
PacejkaPacejka
RPM
Forza
Motoreruota SX
(comandatoin velocità)
Motoreruota DX
(comandatoin velocità)

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Modello Modello MatlabMatlab//SimulinkSimulink
Ingressi segnali+
filtri, caratteristiche
Modelloveicolo
Cambio marcia
Inizializzazione
Comandimotori
Comandi pompaed elettrovalvole

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Modello VeicoloModello Veicolo
Ingressi segnali Coppia erogataMotore controllato in coppiaDinamica veicolo
Velocità ruota DXMotore controllato
in velocità
Velocità ruota SXMotore controllato
in velocità

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
MappatureMappature e caratteristichee caratteristiche
Caratteristica motore(n,TVO -> RPM)
Comando motore(V -> Nm)
Torsiotachimetri(V -> RPM , V -> Nm)
Comandi ruote(V -> RPM)

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Dinamica longitudinale veicoloDinamica longitudinale veicolo
3
Fz_R
2
Fz_F
1
vel_x1/m
calcolo acc_x
f(u)
calcolo Fz_R
f(u)
calcolo Fz_F
3.6Vel_veh_kmh
Memory
1s
v el_x Fx_aer
Forza resistente
Cassa veicolo
4
Fx_FR
3
Fx_RR
2
Fx_RL
1
Fx_FL
Fx_aer [N]
Fx_R [N]
Fx_F [N]
v el_x [km/h]
Resist. aerodin
Forza x,FLForza x,FR
Inerzia
Dinamica longitudinale della cassaDinamica longitudinale della cassaRipartizione del caricoRipartizione del caricoParametro di aderenzaParametro di aderenzaModello pneumatico di Modello pneumatico di PacejkaPacejka’’8989
Resistenzaaerodin
Accel.
Vel.Forza z

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Modello PneumaticoModello Pneumatico
Forza x
Inerzia
Ruotamotrice
Coppia
Jf=1.07; %momento d'inerzia ruote anteriori [kg*m^2]
R0=0.3 raggio di rotolamento
2
Fx
1
w
pi/30
rpm -> rad/s1
pi/30
rpm -> rad/s
Rfront
raggio ruotaanteriore scarica [m]
30/pi
rad/s -> rpm
f(u)
condizioniiniziali
f(u)
calc Raggio
Sicurezzarpm
fondo scala torsiometri
Selector
Ruota FL
1sxo
1/Jr
1
Fx_FL
1
Cm_FL
vel_x
mu
Fz
w
R
Fx
Calcolo Fx
6
mu5
Fz
4
Vel_x 3
Cf
2
Cm
1
w_FL
Fx [N]RPM
Coppia [Nm]
1
Fx
f(u)
slip trazione
f(u)
slip frenata
f(u)
cond
f(u)
calcoloFx
1
Slip_FL
1/1000
N -> kN
1
(1/(2*2*pi))s+1
Fx_Filt
5
R
4
w
3
Fz
2
mu
1
vel_x
Forza x
PacejkaPacejka’’8989
ω
Vel.
Forza z
Slip
Vel.
Forza z
dω/dt
ω
ω
μ
μ
Coppia

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Gestione Cambio MarciaGestione Cambio Marcia
9
En_EV2
8
En_EV1
7
EN_EV0
6
DC_EV0
5
Comando_EV3
4
Duty_Cycle_EV1
3
Duty_Cycle_EV2
2
Com_Pompa
1
Tau
i_up
i_dw
is_up
is_dw
sw_EV1
sw_EV2
temporal_logic
1
inn_up1
u1
u2
u3
u4
u5
if (..)
inn_up
1
inn_sel_up1
u1
u2
u3
u4
u5
if (..)
inn_sel_up
1
inn_sel_dw1
u1
u2
u3
u4
u5
if (..)
inn_sel_dw
1
inn_dw1
u1
u2
u3
u4
u5
if (..)
inn_dw
1
clt1
Out1
Out1
z
1
z
1
11
Switch
gear_pos
shif t_pos
marcia
Osservatore stato cambio
1
Marcia_
Mappa Tau
if { }Out1
if { }Out1
if { }Out1
if { }Out1
[is_dw][is_up]
[i_dw][i_up]
[marcia]
Goto5
[inn_sel_dw]
[inn_dw]
[clt]
[Target_clt]
[pulse]
[shift_pos]
[gear_pos]
[inn_sel_up]
[inn_up]
[inn_dw]
[marcia]
[inn_sel_up]
[inn_up]
[inn_sel_up]
[inn_up]
[marcia]
[Target_clt]
[Target_clt]
[marcia]
[clt]
[pulse]
[pulse]
[shift_pos]
[gear_pos]
[is_up]
[is_dw]
[i_dw]
[i_up]
[inn_sel_up]
[inn_sel_dw]
[inn_up]
[marcia]
[inn_sel_dw]
[inn_dw]
[inn_sel_up]
[inn_up]
[marcia]
[inn_sel_dw]
[inn_dw]
[inn_sel_dw]
[inn_dw]
[clt]
Out1
1
Enable_EV2
1
Enable_EV1
marcia
u_d
gear_pos
shif t_pos
error_clt_pos
inn_up
inn_sel_up
clt
inn_dw
inn_sel_dw
Controllore Logica
I_EV0_f b
error_pos_clt
DC_EV0
Enable_EV0
Conrollo frizione
SW_EV1
I_EV2_f b
I_EV1
SW_EV2
DC_EV2
DC_EV1
Comando_EV2_UP
Out3
Comando EV3 Out3
Comando EV3
U_D
UP
DOWN
Cloche_control
Add_error_pos
48-53 bar
8
I_EV2_fb
7
I_EV1
6
I_EV0_fb
5
clt_pos_fb
4
U_D
3
Shift_Pos
2
Gear_Pos
1
Hyd_press

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Modello Modello LabViewLabView
ComandoTVO
RPM motore
Coppia motore
RPM ruote
Coppie ruote
Marcia

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Modello Modello LabViewLabView
Inizializzazione
Cambio marcia
Logica cambio marciaLogica cambio marciaComandi Comandi elettrovalvoleelettrovalvole
Abilitazione comandiAbilitazione comandiPartenza modello HILPartenza modello HIL

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Procedura SITProcedura SIT
PC Host
LabView
PC Target
Matlab / Simulink
Software Software realreal--timetime (1 (1 kHzkHz))PC PC HostHost: : SimulinkSimulink --> > compilato compilato .dll.dll --> PC Target> PC Target

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Prove sperimentaliProve sperimentali
Test in condizioni stazionarieTest in condizioni stazionarie
Test di cambio marciaTest di cambio marcia
Test di fault Test di fault analysisanalysis
Comportamento del cambiorobotizzato “selespeed”
Prestazioni della trasmissione
0 20 40 60 80 100 120 140 160 180-500
-400
-300
-200
-100
0
100
200
300
400
500
Tempo [s]
Cop
pia
[Nm
]
GBout
CDX+CSX
CSX
CDX
TVO

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Prove sperimentali: Prove sperimentali: Condizioni StazionarieCondizioni Stazionarie
Comando TVO
Coppia erogata
Cinematicaveicolo
Dinamicaruota
Coppietrasmesse

Politecnico di Torino Dipartimento di Meccanica - Meccanica del Veicolo e Sistemi di sicurezza attiva
Prove sperimentali: Prove sperimentali: Cambio MarciaCambio Marcia
Posizione selezione
Posizione innesto
Marcia Innestata
Posizione Reggispinta
Comando Cloche