
An In-Situ Disaster Prevention Framework with Sustainable...
4
An In-Situ Disaster Prevention Framework with Sustainable Electronics and Cyber-Physical Systems Vania V. Estrela Telecommunications Dep., Universidade Federal Fluminense, RJ, Brazil, [email protected] Osamu Saotome CTA-ITA-IEEA 12.228-900, Sao Jose dos Campos, SP, Brazil [email protected] Jude Hemanth Karunya University, Coimbatore, India, jude_hemanth@rediffmai l.com Edwiges G. H. Grata Universidade Federal Fluminense, [email protected] om Abstract— Landslides cause huge losses of life and property. Warning communities of the incoming hazards gives people enough time to remediate, safeguard things and abandon a site if needed. Emergency Response (ER) frameworks can be modeled as a Cyber-Physical System (CPS) with sensors and actuators for environmental monitoring. This article focuses on the instrumentation level of Visual Sensor and Actuator Networks (VSANs) using sustainable electronics and re-engineering to ease the complications brought in by the present economic crisis and scarce availability of financial resources. This approach examines ways that salvaged electronic components can assist distant to reach and economically deficient locations. The complexity of these systems and their necessity for self-sufficiency within the perspective of a developing country while keeping them maintainable and available to nontechnical workers poses challenges. Keywords—landslide detection, motion estimation, emergency response, salvaged electronics, cyber-physical system, sensors, humanitarian engineering, green design. I. INTRODUCTION Landslide recognition and monitoring can be done two- fold: (i) via Remote Sensing (RS), and (ii) by in-situ measurements. The second category allows for more intensive reuse of electronic components, which leads to sustainable practices. Nowadays, regions subject to landslides should consider not only social approaches to resilience, but also opportunities created through science and technology. A Cyber-Physical System (CPS) can improve greatly natural disaster resilience because its architecture along with its Sensor and Actuators Networks (SANs) can reduce the impact of an event [1, 4, 9]. The three parts of a CPS are shown in Figs. 1, 2, and 3: the physical world, interfaces, and the cyber units [9]. The physical world denotes the physical phenomena to be monitored or controlled. CPSs process data and communicate with their environment in a distributed fashion via sensors and actuators that convert other forms of energy to signals and vice-versa. Fig. 1. ER-CPS proposed framework. Communication Networks regulate remote communication and information sharing among devices. Resource scheduling in shared SANs is challenging and plays a vital role in CPS operation. Actuation coordination is essential to schedule actuators for a particular action or to manage control actions properly. Decision Making requires a control unit to monitor and manage the overall CPS via communication among sensors and actuators. This paper focuses on the development of an ER-CPS with in-situ sensors for landslide monitoring using salvaged 2017 Brazilian Technology Symposium ISSN 2447-8326. V.1. © 2017 BTSYM
Transcript of An In-Situ Disaster Prevention Framework with Sustainable...

An In-Situ Disaster Prevention Framework with
Sustainable Electronics and Cyber-Physical Systems
Vania V. Estrela
Telecommunications Dep.,
Universidade Federal
Fluminense, RJ, Brazil,
Osamu Saotome
CTA-ITA-IEEA 12.228-900,
Sao Jose dos Campos, SP,
Brazil
Jude Hemanth
Karunya University,
Coimbatore, India,
jude_hemanth@rediffmai
l.com
Edwiges G. H. Grata
Universidade Federal
Fluminense,
om
Abstract— Landslides cause huge losses of life and property.
Warning communities of the incoming hazards gives people
enough time to remediate, safeguard things and abandon a site if
needed. Emergency Response (ER) frameworks can be modeled
as a Cyber-Physical System (CPS) with sensors and actuators for
environmental monitoring. This article focuses on the
instrumentation level of Visual Sensor and Actuator Networks
(VSANs) using sustainable electronics and re-engineering to ease
the complications brought in by the present economic crisis and
scarce availability of financial resources. This approach examines
ways that salvaged electronic components can assist distant to
reach and economically deficient locations. The complexity of
these systems and their necessity for self-sufficiency within the
perspective of a developing country while keeping them
maintainable and available to nontechnical workers poses
challenges.
Keywords—landslide detection, motion estimation, emergency
response, salvaged electronics, cyber-physical system, sensors,
humanitarian engineering, green design.
I. INTRODUCTION
Landslide recognition and monitoring can be done two-
fold: (i) via Remote Sensing (RS), and (ii) by in-situ
measurements. The second category allows for more intensive
reuse of electronic components, which leads to sustainable
practices.
Nowadays, regions subject to landslides should consider
not only social approaches to resilience, but also opportunities
created through science and technology. A Cyber-Physical
System (CPS) can improve greatly natural disaster resilience
because its architecture along with its Sensor and Actuators
Networks (SANs) can reduce the impact of an event [1, 4, 9].
The three parts of a CPS are shown in Figs. 1, 2, and 3: the
physical world, interfaces, and the cyber units [9]. The
physical world denotes the physical phenomena to be
monitored or controlled. CPSs process data and communicate
with their environment in a distributed fashion via sensors and
actuators that convert other forms of energy to signals and
vice-versa.
Fig. 1. ER-CPS proposed framework.
Communication Networks regulate remote communication and information sharing among devices. Resource scheduling in shared SANs is challenging and plays a vital role in CPS operation. Actuation coordination is essential to schedule actuators for a particular action or to manage control actions
properly. Decision Making requires a control unit to monitor and manage the overall CPS via communication among sensors and actuators.
This paper focuses on the development of an ER-CPS with
in-situ sensors for landslide monitoring using salvaged
2017 Brazilian Technology Symposium
ISSN 2447-8326. V.1. © 2017 BTSYM

electronic components and re-engineering because this
paradigm is very convenient to model the prevention,
remediation, and adaptation to risks in underprivileged
regions. At the instrumentation level, in-situ Visual Sensor
and Actuator Networks (VSANs) can ease the problems
brought in by the current economic crisis and scarce
availability of financial resources.
Fig. 2. Typical Cyber-Physical System (CPS) architecture.
Fig. 3. The control perspective of a CPS.
This article is organized as follows. Section II explains a
possible setup for an ER-CPS. Section III explains the concept
of Optical Flow (OF). The use of OF Sensors (OFSs) made
with sustainable electronics for landslide monitoring is
described in Section IV. VSANs are described in Section V.
Finally, Section VI brings in a discussion and conclusions.
II. EMERGENCY RESPONSE SYSTEMS AS CPSS
Emergency Response (ER) refers to handling the threats to public safety, health, and welfare and protecting the nature, properties, and valuable infrastructures. CPS can provide fast ER via a large number of sensor nodes in the areas subject to natural or man-made disasters. Nonetheless, this rapid response entails the nodes to collectively evaluate the situation and rapidly inform the central authority even in the frequently-changing environments. So robustness, efficient resource utilization, adaptiveness, and timeliness come into play in this ER [9, 10].
ER and disaster management have always drawn attention because of their societal implications. Emergency management in the future should adopt emerging ICTs and social media. Strong cooperation amongst emergency management professionals, local/national authorities, and the community are compulsory. The efficient use of forewarning, response, and recovery mechanisms is required in the future emergency management systems [4]. Unmanned aerial or ground vehicles can be deployed to provide efficient search and rescue efforts. New technologies having physical awareness can be integrated into the infrastructures to manage ER and disaster recovery in the future.
(a) (b)
Fig. 4. (a) Optical sensors from old printers and scanners. (b) Optical sensors with 4 pins.
Fig. 5. Motion detector using mouse parts.
III. OPTICAL FLOW SENSOR AS DISPLACEMENT DETECTOR
Optical Flow (OF) methods date from the 1980s [5, 6] and
many different implementations have been proposed since
(e.g., [12, 13, 14, 15, 16]). They rely on radiometric
differences between consecutive frames from a scene
assuming constant intensity changes or corrected factors such
as the imaging system and scene illumination. Let us consider
the intensity at an image frame k at a pixel location r=(x, y):
Ik(x,y) = Ik-1(x-dx, y-dy),
where d = (dx, dy) is the Disparity Vector (DV) or Motion
Vector (MV) in the image space describing the transformation
mapping Ik onto Ik-1. For small offsets d, this relationship
obtained from a Taylor series expansion holds
1
1 1( ,,
) ),,
,,
(,k
k
x y
k
k
I x yI x y I x y d x y d x y
I x y
x y
and it shows that the deformation between two frames is
encrypted in the brightness differences. This expression yields
an ill-posed problem, since only the parallel component to the
image brightness gradient 1 1( ( , ) , ( , ) )k kI x y x I x y y of
the MV can be found. With the help of a local window, the
problem can be regularized, assuming that the disparity field is
constant over a certain area (smoothness constraint) or using a
global regularization methodology. Ideally, the performance
should only be limited by the radiometric noise. The OF
technique is effective to measure strain from photogrammetry,
but it fails when the images have different view angles, the
surface roughness at the pixel scale is large (e.g., with high-
resolution imagery of important areas) or when the
displacement field is locally discontinuous. OF is very
sensitive to intensity variations not due to scene deformations.
OF methods can model higher-order deformations,
particularly, to measure locally affine distortions and to
account for minor contrast variations [2, 3, 7, 8, 12].
2017 Brazilian Technology Symposium
ISSN 2447-8326. V.1. © 2017 BTSYM
IV. LANDSLIDE MONITORING
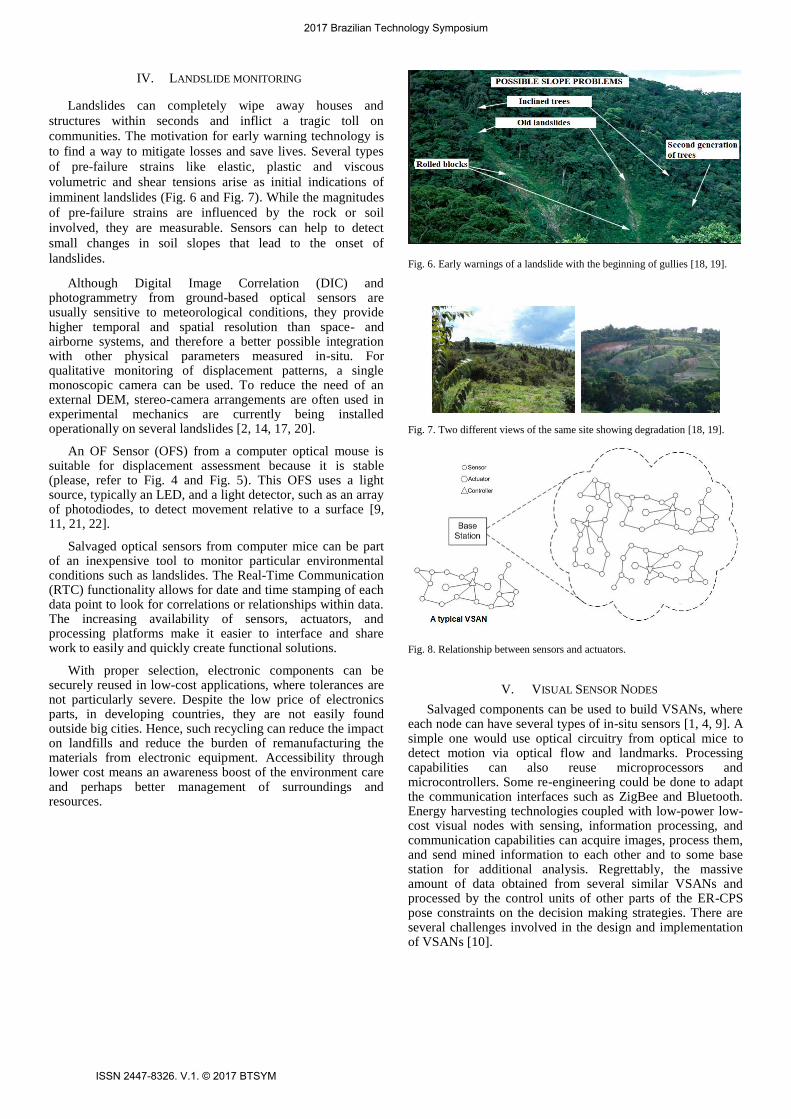
Landslides can completely wipe away houses and
structures within seconds and inflict a tragic toll on
communities. The motivation for early warning technology is
to find a way to mitigate losses and save lives. Several types
of pre-failure strains like elastic, plastic and viscous
volumetric and shear tensions arise as initial indications of
imminent landslides (Fig. 6 and Fig. 7). While the magnitudes
of pre-failure strains are influenced by the rock or soil
involved, they are measurable. Sensors can help to detect
small changes in soil slopes that lead to the onset of
landslides.
Although Digital Image Correlation (DIC) and photogrammetry from ground-based optical sensors are usually sensitive to meteorological conditions, they provide higher temporal and spatial resolution than space- and airborne systems, and therefore a better possible integration with other physical parameters measured in-situ. For qualitative monitoring of displacement patterns, a single monoscopic camera can be used. To reduce the need of an external DEM, stereo-camera arrangements are often used in experimental mechanics are currently being installed operationally on several landslides [2, 14, 17, 20].
An OF Sensor (OFS) from a computer optical mouse is suitable for displacement assessment because it is stable (please, refer to Fig. 4 and Fig. 5). This OFS uses a light source, typically an LED, and a light detector, such as an array of photodiodes, to detect movement relative to a surface [9, 11, 21, 22].
Salvaged optical sensors from computer mice can be part of an inexpensive tool to monitor particular environmental conditions such as landslides. The Real-Time Communication (RTC) functionality allows for date and time stamping of each data point to look for correlations or relationships within data. The increasing availability of sensors, actuators, and processing platforms make it easier to interface and share work to easily and quickly create functional solutions.
With proper selection, electronic components can be securely reused in low-cost applications, where tolerances are not particularly severe. Despite the low price of electronics parts, in developing countries, they are not easily found outside big cities. Hence, such recycling can reduce the impact on landfills and reduce the burden of remanufacturing the materials from electronic equipment. Accessibility through lower cost means an awareness boost of the environment care and perhaps better management of surroundings and resources.
Fig. 6. Early warnings of a landslide with the beginning of gullies [18, 19].
Fig. 7. Two different views of the same site showing degradation [18, 19].
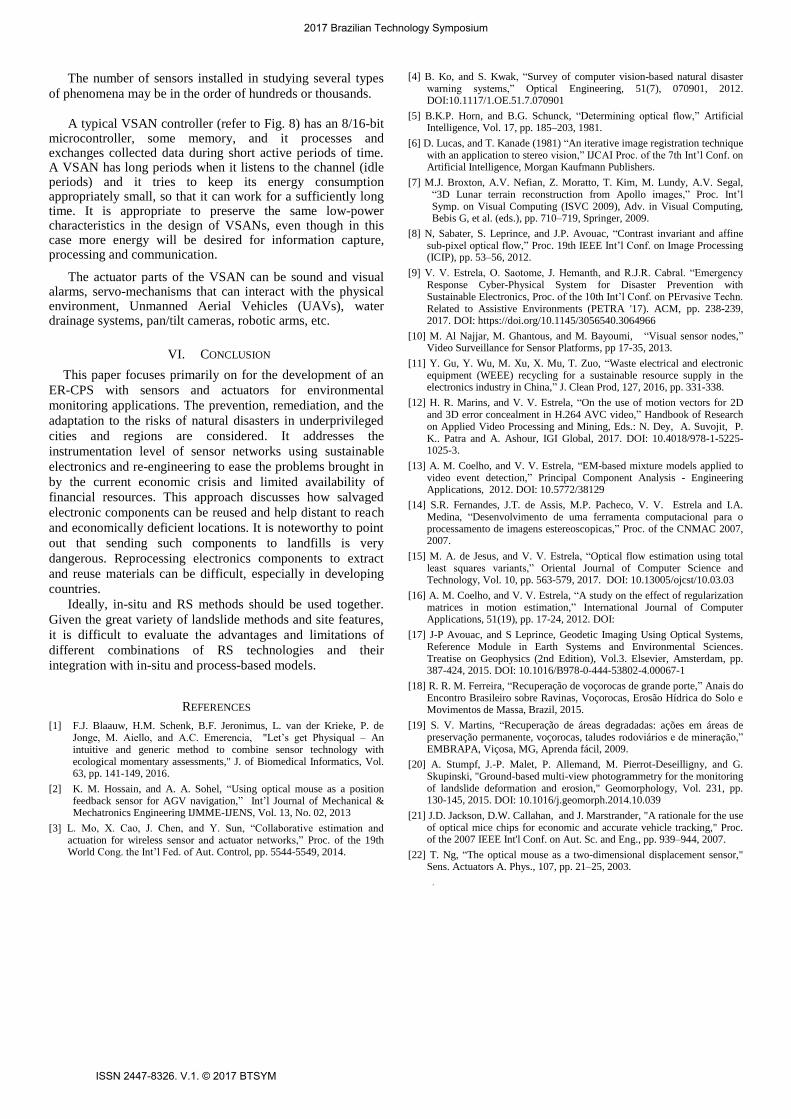
Fig. 8. Relationship between sensors and actuators.
V. VISUAL SENSOR NODES
Salvaged components can be used to build VSANs, where each node can have several types of in-situ sensors [1, 4, 9]. A simple one would use optical circuitry from optical mice to detect motion via optical flow and landmarks. Processing capabilities can also reuse microprocessors and microcontrollers. Some re-engineering could be done to adapt the communication interfaces such as ZigBee and Bluetooth. Energy harvesting technologies coupled with low-power low-cost visual nodes with sensing, information processing, and communication capabilities can acquire images, process them, and send mined information to each other and to some base station for additional analysis. Regrettably, the massive amount of data obtained from several similar VSANs and processed by the control units of other parts of the ER-CPS pose constraints on the decision making strategies. There are several challenges involved in the design and implementation of VSANs [10].
2017 Brazilian Technology Symposium
ISSN 2447-8326. V.1. © 2017 BTSYM
The number of sensors installed in studying several types
of phenomena may be in the order of hundreds or thousands.
A typical VSAN controller (refer to Fig. 8) has an 8/16-bit
microcontroller, some memory, and it processes and exchanges collected data during short active periods of time. A VSAN has long periods when it listens to the channel (idle periods) and it tries to keep its energy consumption appropriately small, so that it can work for a sufficiently long time. It is appropriate to preserve the same low-power characteristics in the design of VSANs, even though in this case more energy will be desired for information capture, processing and communication.
The actuator parts of the VSAN can be sound and visual alarms, servo-mechanisms that can interact with the physical environment, Unmanned Aerial Vehicles (UAVs), water drainage systems, pan/tilt cameras, robotic arms, etc.
VI. CONCLUSION
This paper focuses primarily on for the development of an
ER-CPS with sensors and actuators for environmental
monitoring applications. The prevention, remediation, and the
adaptation to the risks of natural disasters in underprivileged
cities and regions are considered. It addresses the
instrumentation level of sensor networks using sustainable
electronics and re-engineering to ease the problems brought in
by the current economic crisis and limited availability of
financial resources. This approach discusses how salvaged
electronic components can be reused and help distant to reach
and economically deficient locations. It is noteworthy to point
out that sending such components to landfills is very
dangerous. Reprocessing electronics components to extract
and reuse materials can be difficult, especially in developing
countries.
Ideally, in-situ and RS methods should be used together.
Given the great variety of landslide methods and site features,
it is difficult to evaluate the advantages and limitations of
different combinations of RS technologies and their
integration with in-situ and process-based models.
REFERENCES
[1] F.J. Blaauw, H.M. Schenk, B.F. Jeronimus, L. van der Krieke, P. de Jonge, M. Aiello, and A.C. Emerencia, "Let’s get Physiqual – An intuitive and generic method to combine sensor technology with ecological momentary assessments," J. of Biomedical Informatics, Vol. 63, pp. 141-149, 2016.
[2] K. M. Hossain, and A. A. Sohel, “Using optical mouse as a position feedback sensor for AGV navigation,” Int’l Journal of Mechanical & Mechatronics Engineering IJMME-IJENS, Vol. 13, No. 02, 2013
[3] L. Mo, X. Cao, J. Chen, and Y. Sun, “Collaborative estimation and actuation for wireless sensor and actuator networks,” Proc. of the 19th World Cong. the Int’l Fed. of Aut. Control, pp. 5544-5549, 2014.
[4] B. Ko, and S. Kwak, “Survey of computer vision-based natural disaster warning systems,” Optical Engineering, 51(7), 070901, 2012. DOI:10.1117/1.OE.51.7.070901
[5] B.K.P. Horn, and B.G. Schunck, “Determining optical flow,” Artificial Intelligence, Vol. 17, pp. 185–203, 1981.
[6] D. Lucas, and T. Kanade (1981) “An iterative image registration technique with an application to stereo vision,” IJCAI Proc. of the 7th Int’l Conf. on Artificial Intelligence, Morgan Kaufmann Publishers.
[7] M.J. Broxton, A.V. Nefian, Z. Moratto, T. Kim, M. Lundy, A.V. Segal, “3D Lunar terrain reconstruction from Apollo images,” Proc. Int’l Symp. on Visual Computing (ISVC 2009), Adv. in Visual Computing, Bebis G, et al. (eds.), pp. 710–719, Springer, 2009.
[8] N, Sabater, S. Leprince, and J.P. Avouac, “Contrast invariant and affine sub-pixel optical flow,” Proc. 19th IEEE Int’l Conf. on Image Processing (ICIP), pp. 53–56, 2012.
[9] V. V. Estrela, O. Saotome, J. Hemanth, and R.J.R. Cabral. “Emergency Response Cyber-Physical System for Disaster Prevention with Sustainable Electronics, Proc. of the 10th Int’l Conf. on PErvasive Techn. Related to Assistive Environments (PETRA '17). ACM, pp. 238-239, 2017. DOI: https://doi.org/10.1145/3056540.3064966
[10] M. Al Najjar, M. Ghantous, and M. Bayoumi, “Visual sensor nodes,” Video Surveillance for Sensor Platforms, pp 17-35, 2013.
[11] Y. Gu, Y. Wu, M. Xu, X. Mu, T. Zuo, “Waste electrical and electronic equipment (WEEE) recycling for a sustainable resource supply in the electronics industry in China,” J. Clean Prod, 127, 2016, pp. 331-338.
[12] H. R. Marins, and V. V. Estrela, “On the use of motion vectors for 2D and 3D error concealment in H.264 AVC video,” Handbook of Research on Applied Video Processing and Mining, Eds.: N. Dey, A. Suvojit, P. K.. Patra and A. Ashour, IGI Global, 2017. DOI: 10.4018/978-1-5225-1025-3.
[13] A. M. Coelho, and V. V. Estrela, “EM-based mixture models applied to video event detection,” Principal Component Analysis - Engineering Applications, 2012. DOI: 10.5772/38129
[14] S.R. Fernandes, J.T. de Assis, M.P. Pacheco, V. V. Estrela and I.A. Medina, “Desenvolvimento de uma ferramenta computacional para o processamento de imagens estereoscopicas,” Proc. of the CNMAC 2007, 2007.
[15] M. A. de Jesus, and V. V. Estrela, “Optical flow estimation using total least squares variants,” Oriental Journal of Computer Science and Technology, Vol. 10, pp. 563-579, 2017. DOI: 10.13005/ojcst/10.03.03
[16] A. M. Coelho, and V. V. Estrela, “A study on the effect of regularization matrices in motion estimation,” International Journal of Computer Applications, 51(19), pp. 17-24, 2012. DOI:
[17] J-P Avouac, and S Leprince, Geodetic Imaging Using Optical Systems, Reference Module in Earth Systems and Environmental Sciences. Treatise on Geophysics (2nd Edition), Vol.3. Elsevier, Amsterdam, pp. 387-424, 2015. DOI: 10.1016/B978-0-444-53802-4.00067-1
[18] R. R. M. Ferreira, “Recuperação de voçorocas de grande porte,” Anais do Encontro Brasileiro sobre Ravinas, Voçorocas, Erosão Hídrica do Solo e Movimentos de Massa, Brazil, 2015.
[19] S. V. Martins, “Recuperação de áreas degradadas: ações em áreas de preservação permanente, voçorocas, taludes rodoviários e de mineração,” EMBRAPA, Viçosa, MG, Aprenda fácil, 2009.
[20] A. Stumpf, J.-P. Malet, P. Allemand, M. Pierrot-Deseilligny, and G. Skupinski, "Ground-based multi-view photogrammetry for the monitoring of landslide deformation and erosion," Geomorphology, Vol. 231, pp. 130-145, 2015. DOI: 10.1016/j.geomorph.2014.10.039
[21] J.D. Jackson, D.W. Callahan, and J. Marstrander, "A rationale for the use of optical mice chips for economic and accurate vehicle tracking," Proc. of the 2007 IEEE Int'l Conf. on Aut. Sc. and Eng., pp. 939–944, 2007.
[22] T. Ng, “The optical mouse as a two-dimensional displacement sensor," Sens. Actuators A. Phys., 107, pp. 21–25, 2003.
.
2017 Brazilian Technology Symposium
ISSN 2447-8326. V.1. © 2017 BTSYM


















