
An Implicit Time-Stepping Method for Multibody Systems with Intermittent Contact Nilanjan...
18
An Implicit Time-Stepping Method for Multibody Systems with Intermittent Contact Nilanjan Chakraborty, Stephen Berard, Srinivas Akella, and Jeff Trinkle Department of Computer Science Rensselaer Polytechnic Institute (To appear in Robotics Science and Systems 2007)
-
date post
21-Dec-2015 -
Category
Documents
-
view
214 -
download
1
Transcript of An Implicit Time-Stepping Method for Multibody Systems with Intermittent Contact Nilanjan...

An Implicit Time-Stepping Method for Multibody
Systems with Intermittent Contact
Nilanjan Chakraborty, Stephen Berard, Srinivas Akella, and Jeff Trinkle
Department of Computer ScienceRensselaer Polytechnic Institute
(To appear in Robotics Science and Systems 2007)

Introduction
• Dexterous manipulation/Grasping• Mechanical design• Computer Games
Robonaut threading nut onto bolt
Example Grasping experiment where the Circular lock piece must be grasped by the parallel jaw grippers as they close.(Brost and Christensen, 1996)

Related Work
• Differential Algebraic Equation (DAE)(Haug et al. 1986)
– Differential Equations (Motion model) + Algebraic Constraints– Requires knowledge of contact interactions (sliding, rolling or separating)– Contact Interactions not known apriori!
• Differential Complementarity Problem (DCP)
(Stewart and Trinkle 1996; Anitescu, Cremer and Potra 1996; Pfeiffer and Glocker 1996; Trinkle et al. 1997; Trinkle, Tzitizouris and Pang 2001)
– Differential Equations (Motion model) + Complementarity constraints (Contact Model, Friction Model) + Algebraic Constraints
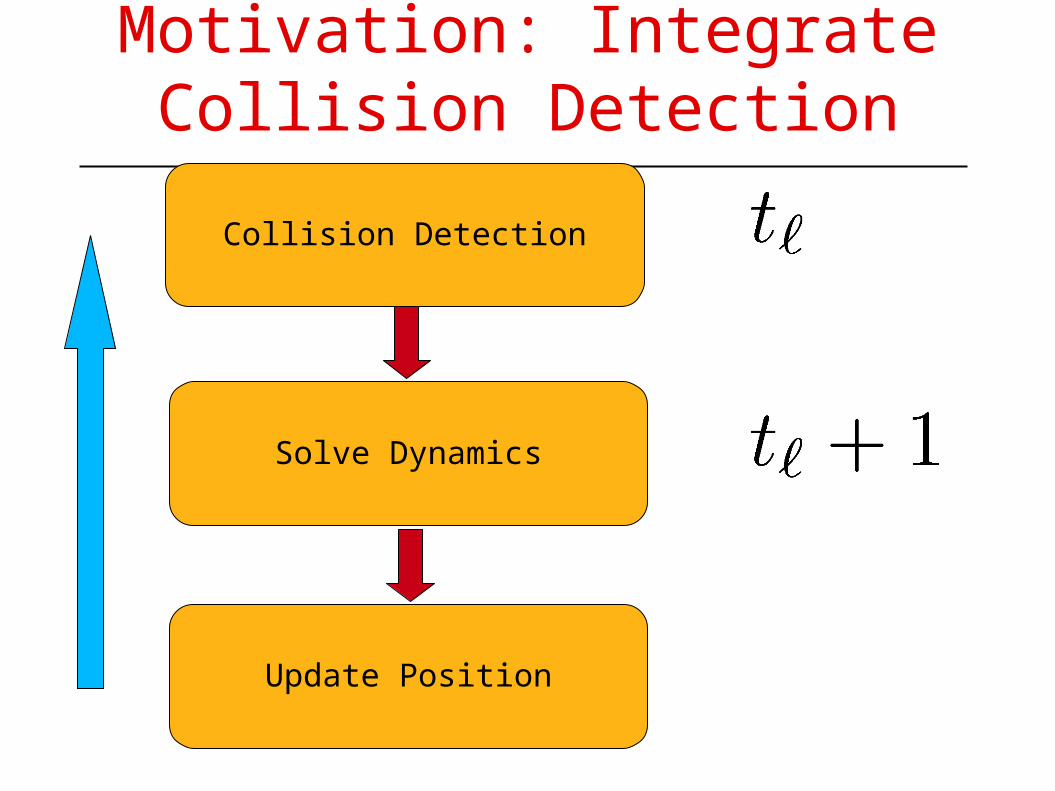
Motivation: Integrate Collision Detection
Collision Detection
Solve Dynamics
Update Position

Motivation: Disc rolling on plane
• Eliminate sources of instability and inaccuracy:– Polyhedral
approximations– decoupling of collision
detection from dynamics
– approximations of quadratic Coulomb friction model10 vertices
100 vertices

Motivation: Disc rolling on plane
Discretization of geometry and linearization of the distance function lead to a loss of energy in current simulators
Results of simulating the rolling disc using the Stewart-Trinkle algorithm for varying number of edges and varying step-size. The top horizontal line is the computed value obtained by our geometrically implicit time-stepper using an implicit surface representation of the disc.(Error Tolerance = 1e-06)

Motivation: Integrate Collision Detection
Collision Detection
Solve Dynamics
Update Position
Goal: Integrate collision detection with equations of
motion
Assumption: Convex objectsdescribed as an intersectionof implicit surfaces.
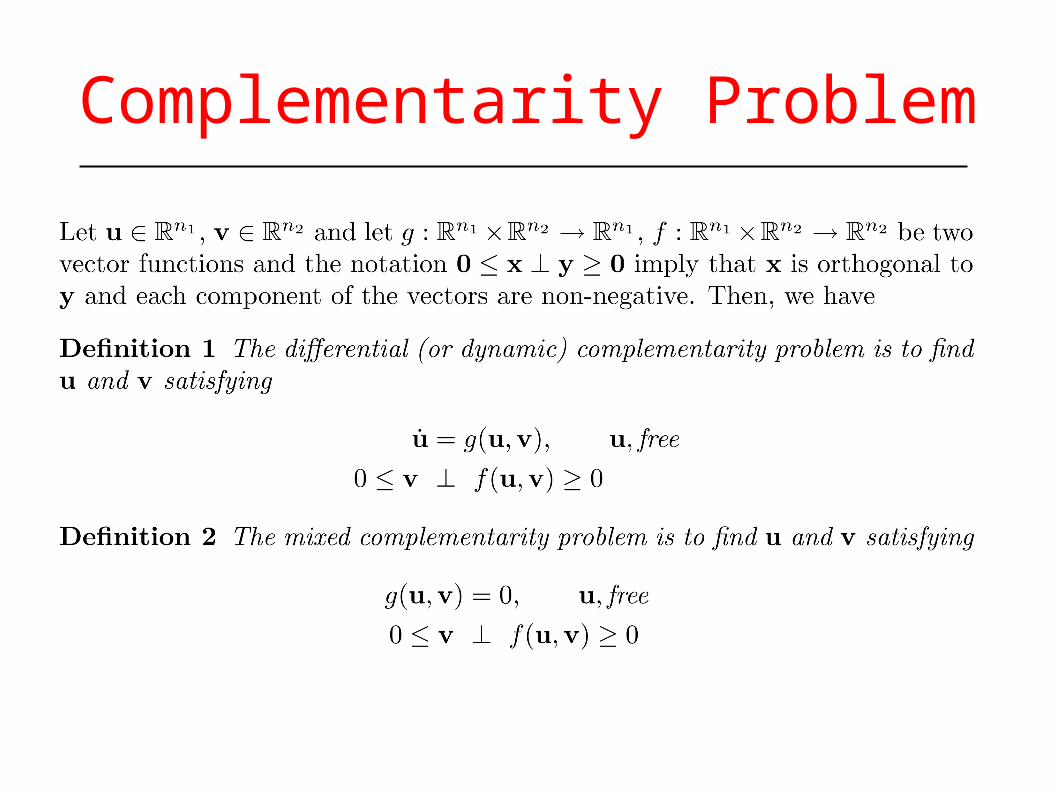
Complementarity Problem

Continuous Time Dynamics Model
Newton-Eulerequations:
Kinematicmap:
Contact constraints:
Mass MatrixContact forces and momentApplied forceCoriolis force
Friction Model: Set of Complementarity Constraints
Joint Constraints: Set of Algebraic Constraints

Discrete Time Dynamics Model
Discrete Time Model:
(Stewart and Trinkle 1996, uses linearized friction cone, subproblem at each time step is LCP)
(Tzitzouris 2001 for closed form distance functions, subproblem at each time Step is NCP)
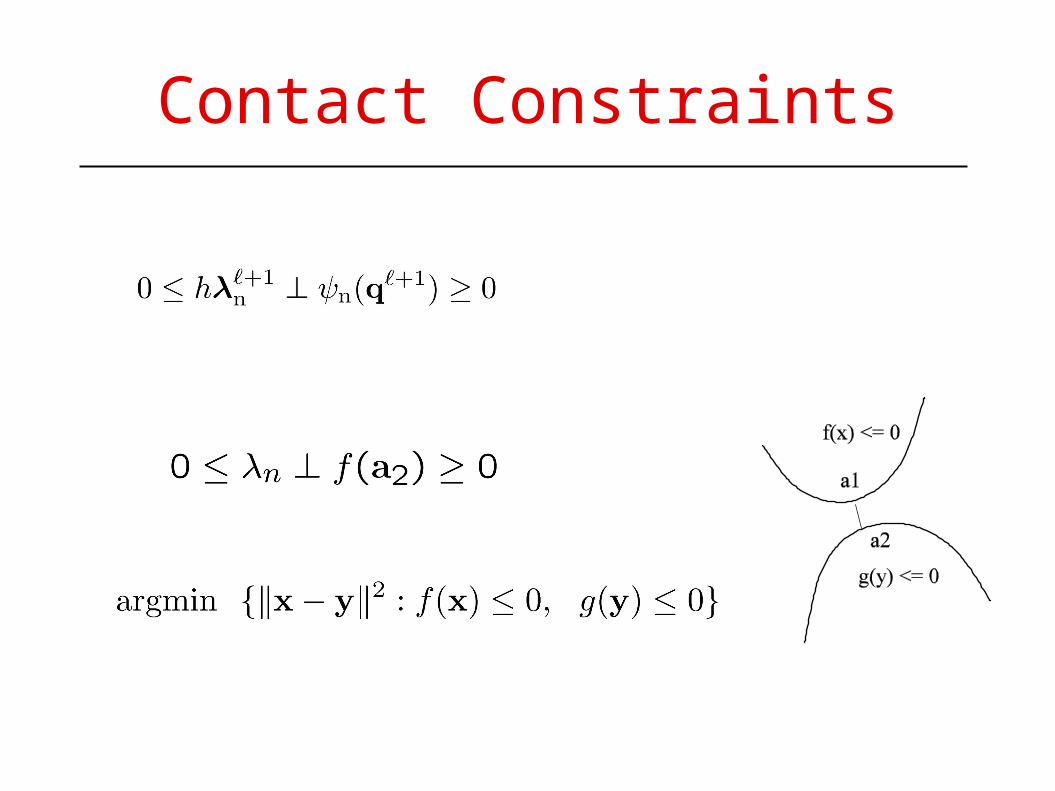
Contact Constraints
Contact Constraint in workspace:
Closest Points are given by:
Contact Constraint in Configuration Space:

Contact Constraints
From KKTConditions:

Discrete Time Dynamics Model
The mathematical model is a Mixed Nonlinear Complementarity Problem.
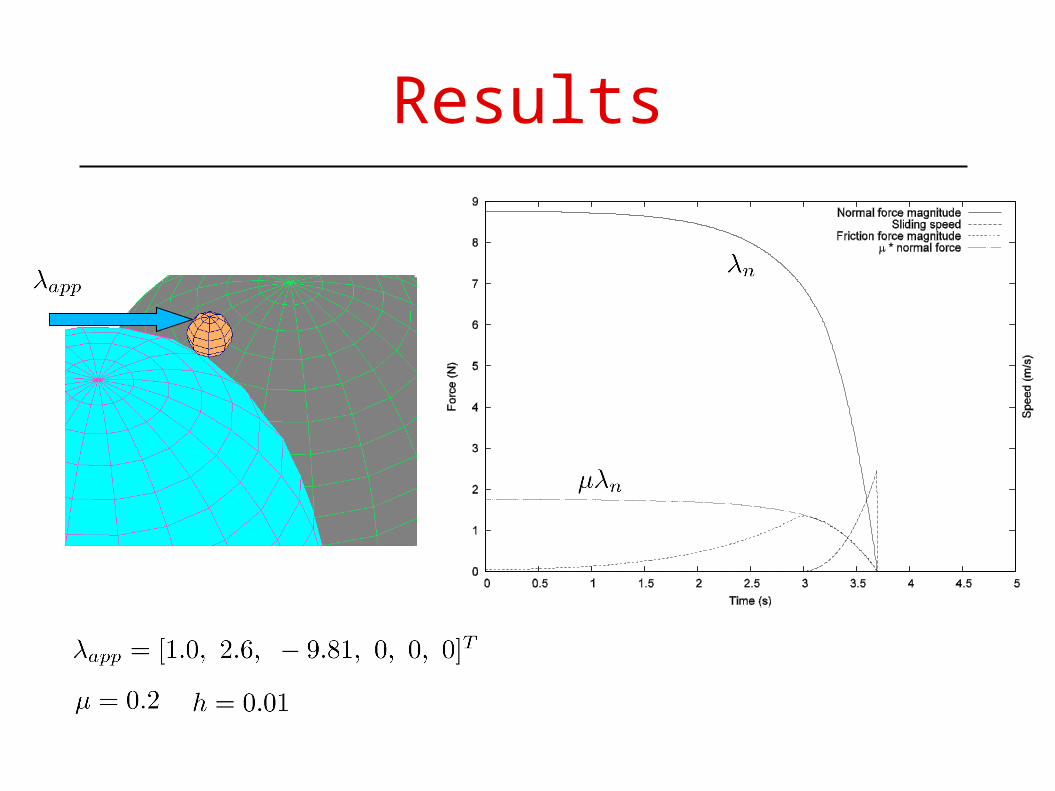
Results

Results

Conclusion
• We presented a geometrically implicit time-stepper for multi-body systems that combines the collision detection and dynamic time step to deal with a source of inaccuracy in dynamic simulation.

Future Work
• Address the question of existence and uniqueness of solutions
• Implementation for intersection of surfaces.
• Extend to nonconvex implicit surface objects described as an union of convex objects as well as parametric surfaces.
• Precisely quantify the tradeoffs between the computation speed and physical accuracy
THANK YOU!


















