AN ALTERNATIVE PROPULSION CONCEPT FOR …auvac.org/uploads/publication_pdf/Folding Blade ASNE...
10
1 Draft Paper submitted for review for presentation at the ASNE Day 2011 "Thinking Outside the Hull" February 10-11, 2011,Hyatt Regency Crystal City, Arlington, VA AN ALTERNATIVE PROPULSION CONCEPT FOR SMALL UNDERWATER VEHICLE APPLICATIONS Yu-Tai Lee Naval Surface Warfare Center, Carderock Div. W. Bethesda, Maryland, USA [email protected] Carol Tseng Naval Surface Warfare Center, Carderock Div. W. Bethesda, Maryland, USA ABSTRACT This paper applies the folding blade concept to propeller designs for unmanned undersea vehicle (UUV), unmanned surface vehicle (USV) and torpedo systems. The folding propeller blades will enhance a propeller’s performance for these small vehicle systems. The design boundary for a folding propeller is expanded because the propeller diameter is not limited by the size of the launch device, which usually is close to the diameter of the vehicle. With a larger propeller diameter, blades work more effectively and have less influence from the vehicle hull boundary layer. The propeller blades are unfolded by the centrifugal force after leaving the launch unit. The capability of launching these vehicles is enhanced for fewer numbers of folded blades with a reduced manufacturing cost. A foldable single rotor propeller design case will be given in the paper to demonstrate the proposed benefit by comparing with the performance of a generic single-stage propeller system, which is a two-blade-row propeller with a stator and a rotor. Another major thrust of the present paper focuses on the manufacturing cost comparisons between a folding blade propeller and a fixed blade propeller. In order to compare the cost for various folding designs, a cost scheme is developed and validated with cost estimates obtained from propeller manufacturing shops. The paper will conclude with quantitative gains in performance and in manufacturing cost saving. INTRODUCTION Considering the goals of the recently developing concepts of unmanned undersea vehicles (UUV), future undersea vehicles are likely to adopt a propulsion system with the capability of producing thrust more effectively while maintaining other capabilities. With this goal in mind, this paper presents the work which investigates a notional concept of using folding propeller blades as a means to achieve higher thrust and lower vibration for future small vehicle propulsion systems. The design boundary of a folding propeller is expanded because the propeller diameter is not limited by the diameter of the launch device or the vehicle diameter. With a large propeller diameter, the blades work more effectively and have less influence from the vehicle hull boundary layer. This benefit can be further enhanced through fitting a variable speed motor with the propulsion system. The propeller blades are unfolded by the centrifugal force after leaving the vehicle launching unit. Its blading can be designed with a numerical optimization procedure to operate at a lower rotating speed. The folded blades can be installed in the rear end with an integrated stern configuration to increase the vehicle interior usable volume. The capability of launching the UUV systems at a higher ship speed is therefore possible with fewer numbers of folded blades. The future smaller vehicle configuration is an enabler for a smaller external impulse system. The folding blade concept has been used in the sail boat industry since the 1990s. FIGURE 1 shows the 3-blade nickel- aluminum-bronze folding propeller by Gori at its web site (http://ab-marine.com/gori/gori-folding-feathering-sailboat- propeller ). Recently, the folding blade concept was also adapted to the glider shown in FIGURE 2FIGURE 2, which has also been installed with a regular engine. This power sailplane [1] with the model name of "the Carat" was manufactured by Ams Flight in Lubljana, Slovenia. The propeller blades are folded forward, giving an appearance that is unconventional on the ground but which is nevertheless an efficient means of drag reduction. FIGURE 1. 3-blade folding propeller by Gori
Transcript of AN ALTERNATIVE PROPULSION CONCEPT FOR …auvac.org/uploads/publication_pdf/Folding Blade ASNE...

1
Draft Paper submitted for review for presentation at the ASNE Day 2011 "Thinking Outside the Hull"
February 10-11, 2011,Hyatt Regency Crystal City, Arlington, VA
AN ALTERNATIVE PROPULSION CONCEPT FOR SMALL UNDERWATER VEHICLE APPLICATIONS
Yu-Tai Lee Naval Surface Warfare Center, Carderock Div.
W. Bethesda, Maryland, USA [email protected]
Carol Tseng Naval Surface Warfare Center, Carderock Div.
W. Bethesda, Maryland, USA
ABSTRACT This paper applies the folding blade concept to propeller designs for unmanned undersea vehicle (UUV), unmanned surface vehicle (USV) and torpedo systems. The folding propeller blades will enhance a propeller’s performance for these small vehicle systems. The design boundary for a folding propeller is expanded because the propeller diameter is not limited by the size of the launch device, which usually is close to the diameter of the vehicle. With a larger propeller diameter, blades work more effectively and have less influence from the vehicle hull boundary layer. The propeller blades are unfolded by the centrifugal force after leaving the launch unit. The capability of launching these vehicles is enhanced for fewer numbers of folded blades with a reduced manufacturing cost. A foldable single rotor propeller design case will be given in the paper to demonstrate the proposed benefit by comparing with the performance of a generic single-stage propeller system, which is a two-blade-row propeller with a stator and a rotor. Another major thrust of the present paper focuses on the manufacturing cost comparisons between a folding blade propeller and a fixed blade propeller. In order to compare the cost for various folding designs, a cost scheme is developed and validated with cost estimates obtained from propeller manufacturing shops. The paper will conclude with quantitative gains in performance and in manufacturing cost saving. INTRODUCTION Considering the goals of the recently developing concepts of unmanned undersea vehicles (UUV), future undersea vehicles are likely to adopt a propulsion system with the capability of producing thrust more effectively while maintaining other capabilities. With this goal in mind, this paper presents the work which investigates a notional concept of using folding propeller blades as a means to achieve higher thrust and lower vibration for future small vehicle propulsion systems. The design boundary of a folding propeller is expanded because the propeller diameter is not limited by the diameter of the launch device or the vehicle diameter. With a large propeller diameter, the blades work more effectively and have
less influence from the vehicle hull boundary layer. This benefit can be further enhanced through fitting a variable speed motor with the propulsion system. The propeller blades are unfolded by the centrifugal force after leaving the vehicle launching unit. Its blading can be designed with a numerical optimization procedure to operate at a lower rotating speed. The folded blades can be installed in the rear end with an integrated stern configuration to increase the vehicle interior usable volume. The capability of launching the UUV systems at a higher ship speed is therefore possible with fewer numbers of folded blades. The future smaller vehicle configuration is an enabler for a smaller external impulse system. The folding blade concept has been used in the sail boat industry since the 1990s. FIGURE 1 shows the 3-blade nickel-aluminum-bronze folding propeller by Gori at its web site (http://ab-marine.com/gori/gori-folding-feathering-sailboat-propeller). Recently, the folding blade concept was also adapted to the glider shown in FIGURE 2FIGURE 2, which has also been installed with a regular engine. This power sailplane [1] with the model name of "the Carat" was manufactured by Ams Flight in Lubljana, Slovenia. The propeller blades are folded forward, giving an appearance that is unconventional on the ground but which is nevertheless an efficient means of drag reduction.
FIGURE 1. 3-blade folding propeller by Gori

2
FIGURE 2. The glider Carat is equipped with 60-hp engine and folding propeller blades
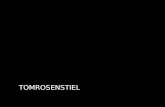
A group of three folding propellers were experimentally evaluated with four fixed-pitch, two feathering and one self-feathering propellers at the MIT Marine Hydrodynamics Laboratory Variable Pressure Water Tunnel [2]. All ten commercially available propellers were of the same pitch and diameter, and tested for their performance characteristics at forward boatspeed/forward rotation (normal forward operation); forward boatspeed/reverse rotation (backing down or crashback); forward boatspeed/no rotation (drag under sail). The normal forward operation simulates most of the common vehicle motion. The ‘drag under sail’ condition relates to the launch stage of the UUV operation. The measured efficiency and the thrust coefficient for the normal forward operation are plotted in FIGURE 3. These propellers were all designed to be capable of propelling a typical 30-ft sailboat, which provides a comparable thrust range for the test. Although the test results indicate some variations in thrust generated by each propeller, the efficiency of each propeller depends on its respective design. With a careful design, the folding blade propellers could perform as well as the fixed blade propellers. For the ‘drag under sail’ condition, the fixed propellers have much larger drag than the folding and feathering models, which can be considered to have negligible drag.
FIGURE 3. Efficiency and thrust coefficient for ten tested commercial propellers (Lurie and Taylor 1994)
This paper presents a study examining the powering performance of using a folding propulsor on a vehicle with an axisymmetric body. The installed propeller is a one-stage propulsor with a rotor/stator configuration. A single baseline open propulsor was designed to match the performance characteristics of the original two-blade-row generic propulsor. A parametric study was performed to investigate the powering performance of a folding propulsor with larger diameter blades. A general cost scheme for manufacturing a folding propeller was developed for cost comparison between the candidate designs. Sample calculations with validated costs are provided and compared between a fixed contra-rotating (i.e. a rotor-rotor system with one rotor rotating at an opposite direction to the other) and a pre-swirl (i.e. a stator-rotor system) folding propeller system.
ANALYSIS OF THE GENERIC PROPULSOR
Design Conditions
In order to demonstrate how a folding propeller is designed, the generic propeller based on an existing test vehicle was used to validate the process. The multi-blade-row propeller has rotor-stator configuration. Both rotor and stator have high skew blades and large blade counts. This generic propulsor was originally designed using a streamline curvature method. The mass flow coefficient Cm and the torque coefficient CQ are 0.222 and 0.0428, where
ms B
CV A
q
thrust

3
Q 2S B
C 0.5 DV A
Q
and q is the flow rate, VS the vehicle speed, Q the torque, AB=R2, D and R the vehicle body diameter and radius, ρ the fluid density.
Computational Method
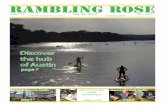
The computational method MTPBD (Multi-passage Throughflow Propeller Blade Design) used to analyze the propulsor flow field consists of MTFLOW (Multi-passage ThroughFLOW design/analysis program), PBD-14 (Propeller Blade Design), and their coupling module as illustrated in FIGURE 4. MTFLOW is an Euler solver, which solves axisymmetric flow around a vehicle body [3]. PBD-14 is a vortex lattice, lifting surface design or analysis code [4] that is used to either develop blade shapes or analyze the forces of a given propeller geometry. The forces from PBD-14 are provided to MTFLOW to model the effects of the propulsor on the axisymmetric flow field. Being a potential-flow code, PBD-14 is unable to interact with the vorticity in the inflow to solve the effective wake problem. MTFLOW, using the propeller forces from PBD-14, can be used to solve the effective wake problem in an iterative process as shown in FIGURE 4 for a multiple component propulsor. Coupling the two codes results in a process that can model multiple blade rows, and the flow around the axisymmetric body.
FIGURE 4. MTPBD propeller flow analysis by coupling PBD-14 with MTFLOW
Computational Procedure and Result Comparison with Existing Propeller
The computation starts with a bare vehicle body and an axisymmetric Euler grid. All geometries presented in this paper are non-dimensionalized by either the vehicle Rref or Dref. The computational domain covers only the aftbody portion of
the vehicle. The grid extends radially 5 times the vehicle’s body radius and axially from the parallel mid-body to 3 times the body radius into the wake of the vehicle. The main body of the grid consists of two zones: the inner region passing through the mid-radius and the outer region. The grid employed has 35 nodes radially in the inner region, 35 nodes in the outer region, and 100 nodes axially. The nominal inflow profile used in the calculations was predicted based on an axisymmetric boundary layer calculation and is shown in FIGURE 5. At the initial calculation with MTFLOW, the flow field was predicted without any propeller effects. The axisymmetric grid is shown in FIGURE 6.
FIGURE 5. Inflow profile used for the MTFLOW calculation
The PBD-14 calculation [4, 5] solves the strengths of vortex elements distributed on the blade and the blade shedding vortex wake based on the kinematic boundary condition for each blade element. Separate calculations would be carried out for each blade row if a multi-blade-row propulsor is to be replaced with the folding blade design. The outputs from these calculations include the induced velocity field from each blade row.
When the MTFLOW throughflow calculation is called after the PBD-14 calculation for each blade row was completed, as shown in FIGURE 4, the flow solution of the MTFLOW computational domain was updated through the inclusion of all the wake velocities predicted by each PBD-14 calculation.
VX
r/R
0.75 0.80 0.85 0.90 0.95 1.001.0
1.1
1.2
1.3

4
FIGURE 6. Computational grid for MTFLOW
The coupling computation between MTFLOW and PBD-14 was carried out by a scripted procedure which automatically links the inputs and outputs of the two programs and several other utility programs to improve the computational efficiency. Parameters defined in the shell script provide user’s control of the details of the calculations and the user can change the values of those parameters in the midst of the calculations. The convergence of the procedure was reached when the variation in the predicted flow field obtained from the MTFLOW changes within a pre-determinated tolerance.
The nominal vehicle speed for matching the MTPBD calculation with the vehicle configuration was specified. The mass flow coefficient Cm and the advance coefficient J (= VS/nD, n is the propeller speed in rps) were adjusted during the MTPBD calculations to match the calculated power coefficient CP with the design value, which was calculated using the measured torque coefficient CQ= 0.0428 and CP = CQ (2π/J) = 0.128. At the final converged condition the Cm and J from the MTPBD analysis are 0.214 and 2.13, as compared with 0.22 and 2.10 from the original design.
FOLDING PROPELLER DESIGN
With the analysis of the generic unit completed and validated, the design options for a folding propeller were investigated. In the following sections, the design strategy is first defined. Then the specific computational method for examining the design parameters is introduced. It follows with the discussion of results of the parametric calculations and the selections of the baseline open propeller and candidates for feasible folding blade designs.
Design Strategy
The constraints for the current design study are: (1) the open rotor is placed at the same location as the rotor for the generic propeller; (2) the original body configuration remains
unchanged; and (3) all the parametric calculations were performed at a specified vehicle speed. For making comparisons between different designs of folding propellers, a baseline single open propeller, which has a comparable performance as the generic unit, is to be established.
Computational Design Method
In order to efficiently examine a design space which covers practical ranges of key design variables, MTFLOW was integrated with a Propeller Lifting Line (PLL) code to form the MTPLL [6] as depicted in FIGURE 7. PLL represents each propeller blade as a set of radial lifting lines. Lifting line calculations can be run much more efficiently than PBD-14 calculations. MTPLL was configured with a designer input module, which provides design related quantities such as number of blades (Z), rotational speed (n), and loading distribution in terms of circulation strength (G), etc. The MTFLOW module of the MTPLL consists of an automated grid-generation component (MTSET), solution component (MTSOL), and an output unit. Although the grid generated in MTSET is similar to the grid used for the MTPBD calculation, the initial grid is more uniformly spaced than the grid for the MTPBD calculation. MTPLL is scripted to perform series of calculations to cover ranges of design parameters.
FIGURE 7. Coupled MTPLL for design calculations
Parametric Calculations for Single Open Rotor
Parametric calculations using MTPLL were first run for variations of the rotor diameter and the advance coefficient. The range of diameters investigated was from 0.857D to 1.485D. This would encompass single row fixed rotor designs and large diameter folding blade configurations. The range of the advance coefficient was from J = 0.98 to a maximum of J = 5.90. These calculations would also include conditions with the effects of reduced RPM. One series of lifting line calculations included 8 diameters and 7 advance coefficient values. An option of PLL was employed to adjust the chord of
x/R
r/R
-1.0 -0.5 0.0 0.5 1.00.0
0.5
1.0
1.5
2.0(a)
MTPLL Flow Diagram
Centerbody and/or Duct Geometry
Designer Inputs:Z, , G(t), etc.
MTFLOWBINARYSTATE
(Restart)FILE
ITERATE
PLL
MTPLLLOG FILE
FOR FORCES
COMPUTES AXISYMMETRIC AND LOCAL FORCES ON LIFTING LINE
MTSET
MTSOLSOLVES EULER EQN. WITH OR WITHOUT PROPULSOR
GENERATES PRELIMINARY GRID

5
the blades to meet specific limits of maximum blade stress and maximum tip vortex cavitation index limits of the generic propulsor. This maximum blade stress was used in the later section as the normalizing reference stress. The rotor tip vortex cavitation σTV was calculated as 2gh/VS
2 with h being the pressure above the tip vapor pressure and treated as the controlling cavitation form. A script was used to gather the output parameters from all the calculation results into a single plot file for examination. This script also runs an interpolation routine that interpolates points between the conditions calculated for a smooth plot of the parametric design space.
The first case examined was for a slightly tip-unloaded circulation distribution (G1) with 5 blades. A plot of rotor speed versus rotor diameter is shown in FIGURE 8 with contours of ΔPC (change of propulsive coefficient), relative vibration level (ΔdB) and tip-vortex cavitation inception number ΔSTV (ΔσTV). PC was calculated as the ratio of the effective horsepower to the shaft horsepower and equal to RTVS/2nπQ, where RT is the vehicle resistance without propeller. The vibration level was estimated as a function of the propeller diameter D, the expanded area ratio EAR = AE/πR2, the blade relative velocity VR and blade weight
W, where AE is defined as TIP
HUB
R
R
cdr and c is the blade chord as
a function of local radius r. The relative vibration is a difference of predicted vibration for the calculated configuration compared to the generic unit (obtained from the previous MTPBD calculation). At this concept evaluation stage for the folding propeller, this vibration estimation provides only the relative comparisons between the folding propeller candidates. The vibration associated with the unsteady blade rate forces between the propeller and the control appendages and the propeller-hull interaction is out of scope of the current comparisons. FIGURE 8 indicates that a propeller with a diameter of 1.26 Dref can maintain the vibration level and still improve PC by 8%. Further discussions about the results in FIGURE 8 are given in the later sections. Additional parameters were included in the matrix of the parametric study. They include blade thickness, number of blades and loading distributions as presented in the following sections.
Thickness Effects
Initial parametric calculation results showed that the most significant limiting parameter was the vibration requirement to match to the generic propeller. Since thicker blades increase the weight of the propeller, the propeller’s vibration would generally decrease. Limits to increasing the thickness are the reduction in efficiency due to the increased sectional drag and flow separation. A series of MTPLL calculations were performed to evaluate the effect of a thicker blade. The original 5-blade propeller with the same loading, but with 10%
thicker blades was investigated. The predictions show that the thicker blades resulted in a small effect on efficiency.
FIGURE 8. Contours obtained from parametric calculations for single rotor with 5 blades
Effects of Changing Blade Number
For a feasible folding propeller design, the blade count plays an essential role in achieving the goal. Although for mechanical design we would prefer fewer blades, blade loading, cavitation and structural stress may require using a larger number of blades. To see the hydrodynamic effect of the blade count, the same series of parametric calculations were performed with 3-blade and 2-blade rotors. FIGURE 9 and FIGURE 10 show the contour plots of the results of the parametric calculations. By comparing the plots it is apparent that a propeller with lower blade number is more efficient at a given vibration level. The smaller the number of blades is, the larger the diameter of the propeller will be in order to optimize efficiency and also meet the vibration restrictions. To maintain the generic propeller vibration level a diameter of 1.26Dref
would be optimal for a 5-blade design. A 3-blade design would have an optimal diameter of 1.4D ref and a 2-blade design would have an optimal diameter of 1.45D ref.
D/Dref
RP
M/R
PM
ref
0.9 1.0 1.1 1.2 1.3 1.4
0.5
1.0
1.5
2.0
-0.15 -0.10 -0.05 0.00 0.05 0.10 0.15PC
STV=-0.3STV=-0.4
STV=-0.5STV=-0.6 STV=-0.7
STV=-0.8
-6dB-4dB
-2dB0dB
2dB4dB6dB
8dB
10dB
SAMPLE DESIGNOPEN SINGLEZ=5, G1

6
FIGURE 9. Contours obtained from parametric calculations for single rotor with 3 blades
FIGURE 10. Contours obtained from parametric
calculations for single rotor with 2 blades
Circulation Distribution Effects
Circulation distribution impacts the cavitation inception and efficiency. FIGURE 8 to FIGURE 10 indicate that σTV may not be a controlling parameter based on the inception requirement relative to the generic rotor. However, calculations were performed for different circulation distributions to evaluate their effect on other parameters. The original circulation distribution, which has a moderately loaded tip, is designated G1. A circulation distribution that is more loaded in the tip region is designated G2 and a circulation distribution with a lightly loaded tip is designated G3. FIGURE 11 shows the three circulation distributions.
FIGURE 11. Comparison of three circulation distributions
FIGURE 12 and FIGURE 13 show the contour plots of the two loading distributions G2 and G3 versus G1 in FIGURE 11 for the 3-blade rotor. Although most of the regions are within the required cavitation limit, the σTV contours have changed a great deal among these three figures. On the other hand, the circulation distribution G2 with highly loaded tip also yielded a higher efficiency but at a greater risk of cavitation inception.
FIGURE 12. Contours obtained from parametric calculations for single rotor with 3 blades and G2
circulation distribution
D/Dref
RP
M/R
PM
ref
0.9 1.0 1.1 1.2 1.3 1.4
0.5
1.0
1.5
2.0
-0.15 -0.10 -0.05 0.00 0.05 0.10 0.15PC
-6dB-4dB
-2dB0dB
3dB
6dB
10dB
SAMPLE DESIGNOPEN SINGLEZ=3, G1
STV
=-0.1S
TV=-0.2 STV=-0.3 STV=-0.5
STV=-0.6
D/Dref
RP
M/R
PM
ref
0.9 1.0 1.1 1.2 1.3 1.4
0.5
1.0
1.5
2.0
-0.15 -0.10 -0.05 0.00 0.05 0.10 0.15PC
STV=-0.1STV=-0.2
STV=-0.3
STV=-0.4
6dB
3dB
0dB-2dB
-4dB-6dB
-10dB
SAMPLE DESIGNOPEN SINGLEZ=2, G1
r/(ROTOR RADIUS)
G
0.4 0.5 0.6 0.7 0.8 0.9 1.00.00
0.01
0.02
0.03G1G2G3
D/Dref
RP
M/R
PM
ref
0.9 1.0 1.1 1.2 1.3 1.4
0.5
1.0
1.5
2.0
-0.15 -0.10 -0.05 0.00 0.05 0.10 0.15PC
STV=-0.1
STV=-0.2
STV=-0.3
STV=-0
6dB
3dB
0dB-2dB
-4dB-6dB
-10dB
10dB
SAMPLE DESIGNOPEN SINGLEZ=3, G2

7
FIGURE 13. Contours obtained from parametric calculations for single rotor with 3 blades and G3
circulation distribution
Parametric Calculation Results With Constant Vibration Level
It is apparent from examining the contour plots of the parametric calculations that the vibration requirement places the greatest limitation on the design. In order to closely compare the effects of the circulation distribution and the blade count, line plots were made by extracting data from FIGURE 8 to FIGURE 10 and FIGURE 12 to FIGURE 13 along zero vibration level. FIGURE 14 shows how the change in the circulation distribution affects ΔPC, RPM, maximum blade stress and ΔσTV. The more loaded tip circulation G2 shown in FIGURE 14a yielded higher efficiencies, but the cavitation index shown in FIGURE 14c was at the limit unless a large diameter propeller was used (note that FIGURE 14c plots - ΔσTV on its vertical axis). The adverse effect from a highly loaded tip design at a large diameter is a higher ΔσTV than for a moderately loaded tip design, though they are both within the design limit for ΔσTV.
FIGURE 15 shows similar plots for trends due to changes in the number of blades. The difference in ΔPC between the 2-blade and 3-blade designs was negligible, particularly for diameters larger than 1.3D ref. The 3-blade design had lower cavitation index and RPM and higher stress.
CANDIDATES FOR FOLDING PROPELLER DESIGN
The parametric investigation shown in the previous section provides many possible design configurations for the folding blade geometry. We have limited the maximum number of blades for the current study to be 5 based on consideration for future hardware installation. First a non-folding, single-blade-
row open propeller was chosen that would match the generic propulsor performance. According to the results of the parametric study, a fixed 5-blade rotor best matched the generic propulsor performance for an open fixed baseline propeller. Applying the original circulation distribution (G1), the chord-length distribution of the original study shown in FIGURE 8 was increased to match the vibration level calculated for the generic propulsor. TABLE 1 compares the attributes of the generic propulsor with this baseline open rotor, whose blade configuration has a smaller diameter than the vehicle body diameter and is depicted in FIGURE 16. This fixed baseline open propeller connects the generic propeller and all the folding propeller designs through a unified computational method (i.e. MTPBD and MTPLL).
Although the 5-blade propeller would be close to the generic propulsor in terms of efficiency and diameter, the results shown in FIGURE 15a indicated that the 3-blade propeller gave the best efficiency while maintaining good vibration characteristics and safe margins for the tip vortex cavitation inception (FIGURE 12 and FIGURE 13). Though the 2-blade propeller also showed comparable efficiency gains over the generic propeller, concerns about unsteady forces with a 2-blade configuration led to the choice of a 3-bladed design. The candidate for a folding propeller would be a 3-blade design with a diameter of 1.37D. The 3-blade folding propeller characteristics compared with the generic propeller are also compared in TABLE 1. FIGURE 17 shows the blade configuration of the 3-blade folding propeller.
COST ANALYSIS FOR FOLDING PROPELLER
A cost scheme was developed to account for the cost of manufacturing a folding propeller. The development started with comparing four folding propeller manufacturers for sail boat applications. They included Flexofold of Denmark, Varifold or Variprofile of Germany, Seahawk or Autostream/Slipstream of Austria, and Gori or AB Marine of Middletown, RI. Based on the review of the elements for constructing a folding propeller, the following parameters were identified to be included in the current cost estimation: number of blade rows for either a single or multi-blade-row configuration (BR= 1 or 2), rotational direction of each blade row which also includes stationary blade row (n1 and n2= -1, 0 or 1), blade count for each blade row (Z1 and Z2), tip diameter (D1 and D2), hub diameter (d1 and d2), and folding stop (FS1 and FS2 =0 or 1). The consideration for a multi-blade-row folding propeller is limited to BR=2 due to the complexity of the folded blade arrangements. In order to reduce the absolute cost variation among different manufacturers, a normalized formula was derived as follows,
D/Dref
PR
M/P
RM
ref
0.9 1.0 1.1 1.2 1.3 1.4
0.5
1.0
1.5
2.0
-0.15 -0.10 -0.05 0.00 0.05 0.10 0.15PC
STV
=-0.4S
TV=-0.5
STV=-0.6
STV=-0.7
STV=-0.8
10dB
6dB
3dB
0dB-2dB-4dB
-6dB-10dB
SAMPLE DESIGNOPEN SINGLEZ=3, G3

8
FIGURE 14. Parametric plots versus diameter for varying loading distributions along ΔdB = 0 of FIGURES 9, 12 and
13
FIGURE 15. Parametric plots versus diameter for varying blade counts along ΔdB = 0 of FIGURES 8, 9 and 10
D/Dref
PC
0.9 1.0 1.1 1.2 1.3 1.4-0.10
-0.05
0.00
0.05
0.10
G2
G1 G3
(a)
D/Dref
RP
M/R
PM
ref
0.9 1.0 1.1 1.2 1.3 1.40.6
0.8
1
1.2
1.4
G2
G1
G3
(b)
D/Dref
-S
TV
0.9 1.0 1.1 1.2 1.3 1.40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
G2
G1
G3
(c)
D/Dref
ST
RE
SS
/MA
XS
TR
ES
S
0.9 1.0 1.1 1.2 1.3 1.40.0
0.2
0.4
0.6
0.8
1.0
G2
G1 G3
(d)
D/Dref
PC
0.9 1.0 1.1 1.2 1.3 1.4-0.10
-0.05
0.00
0.05
0.10
Z=5
Z=2
Z=3
(a)
D/Dref
RP
M/R
PM
ref
0.9 1.0 1.1 1.2 1.3 1.4
0.2
0.4
0.6
0.8
1.0
1.2
1.4
Z=5
Z=3 Z=2
(b)
D/Dref
-S
TV
0.9 1.0 1.1 1.2 1.3 1.40.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Z=5
Z=3
Z=2
(c)
D/Dref
ST
RE
SS
/MA
XS
TR
ES
S
0.9 1.0 1.1 1.2 1.3 1.40.0
0.2
0.4
0.6
0.8
1.0
Z=5
Z=3
Z=2
(d)

9
TABLE 1 Performance of the open baseline and the 3-blade folding propellers compared with the generic design
Open Baseline Folding 3‐Blade
PC ‐0.05 0.109
RPM (%) ‐1.4 ‐26.8
TV ‐0.41 ‐0.51
D/Dref 0.92 1.37
FIGURE 16. Blade shape of 5-blade open baseline propulsor
FIGURE 17. Blade shape of 3-blade folding propulsor
1 2
, 1 2
1 ( 1) ( )
( ) ( ) ( )
FOLDBR Blade
FIX
n D d FS
CBR C Z Z C
C
Cost Cost FS FS C
where
1 2 1 2
1
( ) ( 1)[ (1 ) ]
if * 1n CR PRE SCost BR nn C nn C
BR n
1( ) * if * 1n nCost BR C BR n
and CFix is the cost for manufacturing a fixed blade rotor. (Cost)D,d is related to the cost of material and has not been included in the current estimation yet. The cost estimates, obtained from a single propeller manufacturer, for five different configurations shown in TABLE 2 are used to obtain the following coefficients: CBlade = 0.1 implies 10% extra cost of the total CFIX
for each folding blade CFS = 0.05 implies 5% extra cost for each folding
blade row stop Cn = 0.55 implies 55% extra cost for a single
folding rotor due to rotation CCR = 1.4 implies extra 140% for a contra-
rotational propeller due to opposite rotations CPRE-S or CPOST-S = 1.0 implies extra 100% cost for a stator
with a folding rotor CBR = 0.13 for cost of folding blade not
considered in this scheme.
TABLE 2 Parameters used for cost estimations on 5 different propeller configurations
Type BR n1 n2 n1+n2 n1xn2 BRxn1 ABS(n1xn2) 1‐ABS(n1xn2)
One Rotor 1 1 1 1
Pre‐Swirl 2 0 1 1 0 0 0 1
Contra‐Rotating 2 ‐1 1 0 ‐1 ‐2 1 0
Co‐Rotating 2 1 1 2 1 2 1 0
Post‐Swirl 2 1 0 1 0 2 0 1 The developed formula was then applied to a cost estimate obtained from another manufacturer for constructing a 3-blade folding propeller with a diameter of approximately 20 inches. Under this condition, BR=1, Z1=3, n1=1, BR*n1=1, FS1=1 The predicted CFold/CFix=1.9 using the developed formula agrees well with the actual cost estimate of CFold/CFix=1.98 obtained from the second manufacturer. Based on the formula, the cost for a fixed contra-rotating propulsion system with a blade count of 5:7 can be calculated using BR=2, Z1=5, Z2=7, FS1=FS2=0, |n1n2|=1, (Cost)n=CCR=1.4, which predict 373% of a fixed rotor system. On the other hand, a pre-swirl folding system with a blade ratio of 5:3 can be constructed based on BR=2, Z1=5, Z2=3, FS1=0, FS2=1, n1=0, n2=1. BR*n1=0, (Cost)n=CPRE-S=1.0,
X
Y
ZX Y
Z

10
which predict 298%. A 75% cost saving is envisioned for a pre-swirl system versus a contra-rotating system. The results and the parameters used are also summarized in TABLE 3.
TABLE 3 Parameters and cost for constructing a fixed contra-rotating system and a pre-swirling folding system
Although some parts of the non-recurring engineering (NRE) cost was embedded in the cost estimates obtained from the two propeller manufacturing shops, a full coverage of NRE cost is yet to be developed. In addition, the complexity of manufacturing processes and tolerance has not been addressed in the current cost formula. A comprehensive cost scheme would also need to include the estimate for the mechanism for attaching the propeller to the drive shaft and the maintenance or life-cycle cost. However, the current cost scheme is able to provide the cost comparison between designs during the concept evaluation stage.
CONCLUSION
The notional concept of applying folding blade design for a small vehicle propulsion system was investigated for powering requirements. The concept is associated with the adaptation of a large diameter propeller and lower rotational speed to improve its performance. The concept was demonstrated by comparing the folding blade designs with an existing generic single-stage propulsor unit. The validation calculation used a coupled Euler (MTFLOW) and a lifting-surface potential (PBD-14) analysis. In addition to the original design point performance, the vibration, cavitation and maximum stress were also evaluated for determining the design criteria for a folding propeller.
The parametric study compared parameters including propeller diameter, blade count and thickness, loading distribution, RPM, propulsive efficiency, cavitation and vibration level. The results show that a single open rotor with larger diameter folding blades can obtain higher efficiency than the generic propulsor. The vibration level requirement was the main constraint on the designs. The increased relative tip speeds of larger diameter rotors results in an increased vibration unless the RPM and number of blades are reduced to control the tip speed. Initially a non-folding 5-blade open propeller was designed to meet the same performance characteristics as the generic propulsor. While performing the parametric study for the folding propeller, the 3-blade and 2-blade propellers had very similar performance characteristics. The gain in efficiency for both designs leveled off at a diameter 37% larger than the
vehicle diameter. The 3-blade propeller was chosen over the 2-blade propeller in order to minimize the possibility of cavitation and unsteady forces. The 3-blade folding propeller is predicted to have an increase in efficiency of at least 10 points over the generic propulsor.
A manufacturing cost calculation formula was developed to compare the cost among possible folding blade designs. Using this cost prediction formula, the folding propeller designs have proven their potential for reducing manufacturing cost for a pre-swirl folding propeller system as compared to a contra-rotating system. Further refinement of the cost calculation scheme is expected when more cost evaluations become available.
ACKNOWLEDGMENTS
This work was supported by the Office of Naval Research under the Multi-Disciplinary System Design and Optimization (MSDO) Program. The program monitor was Dr. Scott E. Hassan.
REFERENCES
[1] Woods, R.O., "Power to the Glider," Mechanical Engineering, the Magazine of ASME, August 2008. [2] Lurie, B. and T. Taylor, “Comparison of Ten Sailboat Propellers,” Report of Department of Ocean Engineering, Massachusetts Institute of Technology, December 1994. [3] Drela, M. and M. Giles, “Conservative Streamtube Solution of Steady-State Euler Equations,” Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, Technical Report CFDL-TR-83-6, November 1983. [4] Kerwin, J.E., D.P. Keenan, S.D. Black, and J.G. Diggs, “A Coupled Viscous/Potential Flow Design Method for Wake-Adapted, Multi-stage, Ducted Propulsors using Generalized Geometry”, SNAME Transactions 1994, November 1994, New York, NY,(SNAME, Jersey City, NJ, 1994) Vol. 102, pp. 23-50. [5] Renick, D.H. , “An Analysis Procedure For Advanced Propulsor Design,” Master Thesis, Department of Ocean Engineering, Massachusetts Institute of Technology, May 1999. [6] Kerwin, J.E., “The Preliminary Design of Advanced Propulsors,” in Proceedings of the SNAME Propellers/Shafting 2003 Symposium, September 2003, Virginia Beach, VA.
Type of Prop BR n1 n2 n1+n2 n1xn2 Z1 Z2 FS1 FS2 Cost/CFIX
Fixed Contra‐Rotating 2 ‐1 1 0 ‐1 5 7 0 0 3.73
Pre‐Swirl Folding 2 0 1 1 0 5 3 0 1 2.98