ABE 463 Electro-hydraulic systems Laplace transform Tony Grift
25
Dept. of Agricultural & Biological Engineering University of Illinois ABE 463 Electro-hydraulic systems Laplace transform Tony Grift 0 t st t L f t f t e dt F s
-
Upload
lester-thomas -
Category
Documents
-
view
219 -
download
0
description
Pierre-Simon Laplace “The French Newton” (1749-1827) Why do we need a Laplace Transform? Definition Laplace Transform Laplace Transform of functions Unit step function Ramp function Exponential function Cosine/Sine Impulse function (dirac delta) Laplace Transform of operations Convolution
Transcript of ABE 463 Electro-hydraulic systems Laplace transform Tony Grift

Dept. of Agricultural & Biological EngineeringUniversity of Illinois
ABE 463 Electro-hydraulic systems
Laplace transform
Tony Grift
0
t
st
t
L f t f t e dt F s

Pierre-Simon Laplace “The French Newton” (1749-1827)
Why do we need a Laplace Transform?Definition Laplace TransformLaplace Transform of functions
Unit step functionRamp functionExponential functionCosine/SineImpulse function (dirac delta)
Laplace Transform of operationsConvolution

The Laplace transform can be used to transform a differential equation into an algebraic equation that can be solved. After transforming back to the time domain we obtain a solution of the differential equation in time.
0
stL f t f t e dt
Time domain: Differential equation
s-domain: algebraic equation Solution in s-domain
Inverse Laplace Transform
Solution in time domain

The Laplace transform is a linear operation
000
dtetgdtetfdtetgtftgtfL ststst
sGsFtgtfL
0 0
st stL Kf t Kf t e dt K f t e dt KF s
sKFtKfL
Red frame: Important result

Laplace transform of unit step function
ss
es
dtetL stst 1101110
0
s
tL 11
0
stL f t f t e dt F s
Definition Laplace Transform
The variable s is a constant under integration with respect to t

Laplace transform of a ramp function
22020
00
0
110110
11
sse
sdte
s
dtes
es
tdtetttfL
st
u
st
u
st
u
st
vu
st
v
Integration by parts
2
1s
ttfL
Blue frame: You should know this already
vuvuuv
vuvuuv
vuuvvu

Laplace transform of an exponential function
0 0
0
1 1 10
a s tat at st
a s t
L e e e dt e dt
ea s a s s a
1atL es a

Laplace transform of cosine function
22cosas
satL
cos Re e jatat
e cos sinjat at j at
0
0 0
2 2 2 2
1 1cos Re 0
1 Re
ja s t ja s tjat stL at e e dt e dt ea s ja s
s ja s ja ss ja s ja s a s a

Laplace transform of sine function
2 2sin aL ats a
sin Im e jatat
e cos sinjat at j at
0
0 0
2 2 2 2
1 1sin Im 0
1 Im
ja s t ja s tjat stL at e e dt e dt ea s ja s
s ja s ja as ja s ja s a s a

Laplace transform of an impulse ‘function’ (Dirac delta distribution)
0
0
lim 1 10
1lim0
st st
s
L t e dt es
e
s
...!3
1!2
11 32 tohxxxe x
Writing as a McLaurin series xe
...!3
1!2
11 32 tohssse s
Writing as a McLaurin series se
0
1/

Laplace transform of impulse (Dirac delta distribution)
...!3
1!2
11 32 tohssse s
...!3
1!2
111 2 tohsss
e s
2lim lim1 1 11 . . . 10 0 2! 3!
seL t s s h o ts
1L t

Check Laplace Transform of differentiation operation
022 0sincos
fsF
bsbsbtbLtfL
0fssFtfL
btbtfbttf cossin
2222 coscosbs
sbbtbLbs
sbtL
Example
Is this correct?

Laplace transform of operations

Laplace transform of differentiation operation
0000
00
0
fssFdtetfsf
dtestfetfdtetfdt
tdfL
st
stst
v
st
u
vuvuuv
vuvuuv
vuuvvu
Product rule:
Integration by parts
0fssFtfL

Laplace Transform of a function shifted in time
0
0
st
s t aas as
L f t a f t a e dt
e f t a e d t a e F s
:Note d t a dt
asL f t a e F s

Laplace transforms of common functions and operations

Initial value and final value theorems

Final value theorem proof (simplified)
lim lim0
f t sF st s
0 00
0st st st
v vu u u v
L f t f t e dt f t e f t s e dt f sF s
0 0
1
lim lim lim0 0
0 0 0
lim0
st stdf dfsF s f e dt e dt f t fs s sdt dt
sF s fs

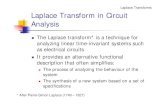
Convolution

Convolution example: Moving average filter
1st iteration
2nd iteration
General
Continuous case
3322111 31 gfgfgfh
4332212 31 gfgfgfh
3
11 3
1n
knnk gfh
0
h t K f x g t x dx

Convolve this vector
1 -2 3
7 2 5 6 8 9 5 1 1 2 8 2 7 2 8 3
21 -8 18 10 17
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
3
11
k n n kn
h f g
MatLab: conv(a,[3 -2 1])

Correct answer 1 -2 3
7 2 5 6 8 9 5 1 1 2 8 2 7 2 8 3
21 -8 18 10 17 17 5 2 6 5 21 -8 25 -6 27 -5 2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
1 -2 3
3
11
k n n kn
h f g

Convolution in time domain = Multiplication in Laplace domain
0 0
0 0 0 0
0 0
0 0
st
st st
s v u
su sv
L h t H s f u g t u du e dt
f u g t u du e dt f u du g t u e dt
v t udv dt
H s f u d g v e dv
f u e du g v e dv
F s G s

The time equivalent of multiplication in the Laplace (and also Fourier) domain is called convolution
g t
G s
F s
f t
H s G s F s
Time domain
s-domain
0
*u t
u
h t g t f t f u g t u du
Impulse response of the systemat t - u
The total response is in fact the sum of all impulse responses over time weighted (multiplied) by the input signal

Dept. of Agricultural & Biological EngineeringUniversity of Illinois
ABE 463 Electro-hydraulic systems
Laplace transform
The End