
A Novel Surgical Pen-Type Master Device using Vibrotactile ...
30
2015. 6. 22. Dong-Soo Kwon* UnJe Yang, HyunYoung Lee, MinHo Hwang, DeokKyun Chung, DeokYu Gong, DongHo Lee *Professor, Mechanical Engineering, KAIST Director, Human-Robot Interaction Research Center Director, Center for Future Medical Robotics A Novel Surgical Pen-Type Master Device using Vibrotactile Feedback JUNE 22-26, 2015 NORTHWESTERN UNIVERSITY, EVANSTON IL
Transcript of A Novel Surgical Pen-Type Master Device using Vibrotactile ...
2015. 6. 22.
Dong-Soo Kwon*
UnJe Yang, HyunYoung Lee, MinHo Hwang, DeokKyun Chung, DeokYu Gong, DongHo Lee
*Professor, Mechanical Engineering, KAIST
Director, Human-Robot Interaction Research Center
Director, Center for Future Medical Robotics
A Novel Surgical Pen-Type Master Device using Vibrotactile Feedback
JUNE 22-26, 2015NORTHWESTERN UNIVERSITY, EVANSTON IL

Korea Advanced Institute of Science and TechnologyKAIST, Daejeon, Republic of Korea
Established February 16, 1971
Type National
President Sung Mo Kang
Academic staff 1,140
Admin. Staff 322
Students 10,249
Undergraduates 4,047
Postgraduates 6,202
Doctoral students 2,311
Other students 1,187 co-terminal MS/PhD
Campus1,432,882 m2 (Daejeon)
413,346 m2 (Seoul)2

Telerobotics & Control LaboratoryMechanical Engineering, KAIST, 1995~
Professor Dong-Soo Kwon
Current Member
Research Professor
2
Alumni
Researchers 7ResearchAssociate
1
Ph. D. Students 14
Ph. D 22M.S. Students 9
Admin. Assistant 1M.S. 45
Human-Robot Interaction Haptics Medical Robotics
3

Interest of Cutaneous Feedback
Oak Ridge National Lab. Research Staff,1991~1995
4/84

• Robotic surgery minimize the invasiveness and provide the convenience with intelligence
< Conventional Surg. Instrument > < Modern Surg. Instrument > < Robotic Surg. Instrument >
InvasivenessInvasiveness
ConvenienceConvenience
Advancement of the Surgical Tools
Invasiveness & Convenience
5

Open Surgery Minimally Invasive Surgery
Non Invasive Surgery
Invasiveness
Advanced ToolAutomatic
Surgical ToolIntelligent
Surgical Tool
Intelligence
For Patients :
For Doctors :
Less pain, fast recovery
Convenient, no mistake
6

※ Investor Presentation Q3 2013, Intuitive Surgical
Medical Robot shows Rapid Progress in the GlobalMarket
7

Many Laparoscopy Robots are Being Developed toCompete with da Vinci System
Raven (Washington Univ., USA) ALF-X (Sofar S.p.A, Italy)
MiroSurge (DLR, Germany) Amadeus (Titan, Canada)da Vinci (Intuitive Surgical, USA)
Robin Heart (TUL, Poland) 8

Robin HeartTechnical University of Lodz, Poland
prof. Leszek PodsedkowskiegodaVinci-like slave console
Unique master console
ALF-XAdvanced Laparoscopy through Force-RefleCT(X)ion Sofar S.p.A, ItalyCart motion for positioningOnly 1 arm/cartCollision avoidableWide space necessary
Current Surgical Robot Systems
9

MiroSurgeDLR, GermanyMIRO: 7-DoF robot armNo RCM mechanismMICA: 2-DOF surgical instrument with force-torque sensing capabilities3kHz position control
AmadeusTitan Medical Inc., CanadaKUKA’s 7-DoF robot armFDA submission in late 2014Similar to da VinciRoute change to SPL (SPORT)
SPORT (Single Port Orifice Robotic Technology)
Current Surgical Robot Systems
10

da Vinci(Intuitive Surgical)
NeuroArm(University of Calgary)
SPRINT(University of Nebraska
Medical Center)
• Master & Slave with same joint structure
• Joint by joint Mapping
• Neuro-Surgery System• 6-Dof Slave & Master• Position / Orientation
decoupled
• 6-Dof Slave & 7-DofMaster
• Position / Orientation decoupled
• Actuator joints
• 6-Dof Slave & Master• Position / Orientation
decoupled• Master base is
attached upon user
Robin heart shell(Poland)
Current Surgical Robot Systems master
11

• 6-DoF input device• Position / Orientation joints are decoupled → Dexterous workspace ↑• Actuator joints : Gravity compensation (o) / Force Feedback (x)• Small link length → Small workspace → Clutch motion↑ → Stress ↑ ↑*• In case of using MIS environment, low intuitiveness
Geo-magic Touch (Senseable)
Phantom Premium (Senseable)
Omega. 7(Force Dimension)
Omega. 6(Force Dimension)
* Rassweiler, Jens, et al. "The role of laparoscopic radical prostatectomy in the era of robotic surgery." European Urology Supplements 9.3 (2010): 379-387.* Wauben, L. S. G. L., et al. "Application of ergonomic guidelines during minimally invasive surgery: a questionnaire survey of 284 surgeons." Surgical Endoscopy And Other Interventional Techniques 20.8 (2006): 1268-1274.
Current commercialized general purpose master device for surgical robot
12

Conceptual Design of Our Surgical Robot System
Master System
Slave System
Base Platform
Positioning Arm
Active Robot Arm
Surgical Tool
[Base Platform]
[Active Robot Arm]
[Elbowed Surgical
Tool]
[PositioningArm]
[Master System]
[Operating Table]
13

Open Surgery Laparoscopic Surgery(MIS) Single Port Surgery
Recovery Time 4~6 Weeks 1 Week Less than 1 WeekAesthetic Big scar Small scar Small or no scar
Pain Big Small Small
Open SurgeryLarge Incision
Laparoscopic surgery3~4 of small incisions
SPL(Single Port Laparoscopy)Single incision
Lapse of TimePast Present
: Single Port SurgerySPS is Becoming Popular as a New Domain
14

• H-shaped integrated console base• Fixing position through brake, • Decreasing cost
• Elbow-equipped instrument• Minimizing of the movement of external robot arm • Providing Smooth surgical environment to operators
• Direct-driven robot arm• Avoiding collision• Increasing usability and accessibility• Decreasing cost
• Intuitive master system• Allowing natural control of slave system• Decreasing inertia and friction
We are Proposing a SPS Robot System
15
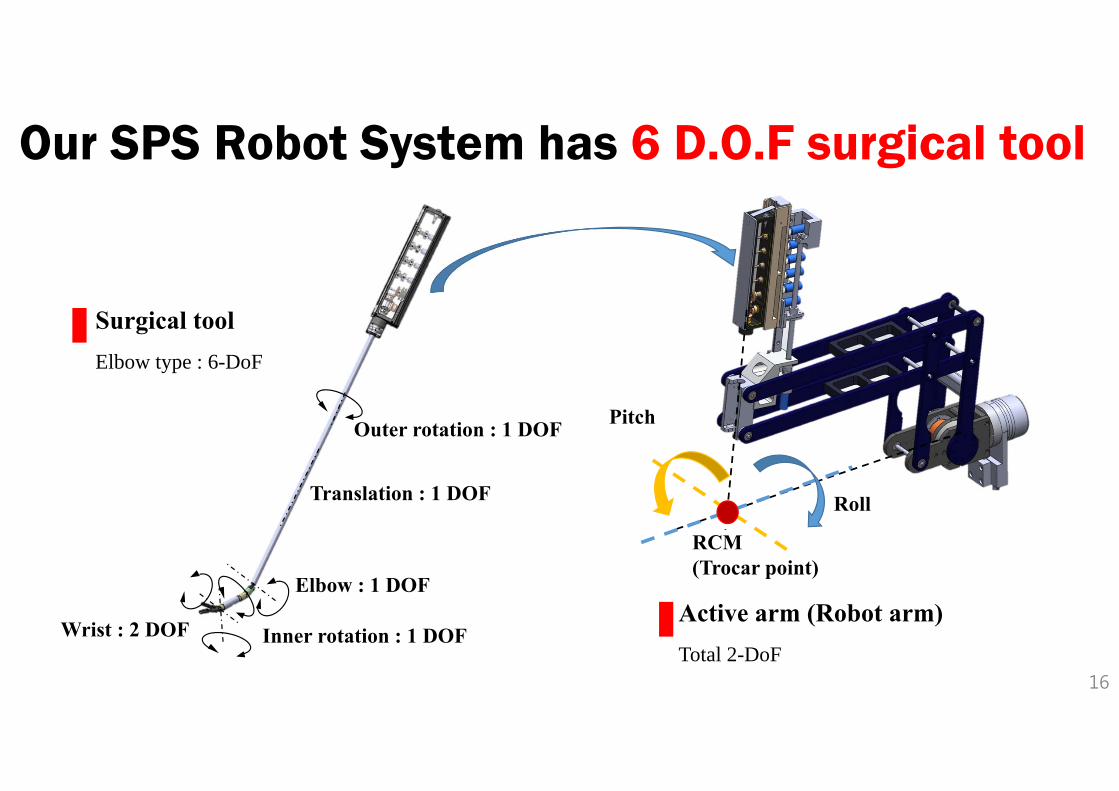
Our SPS Robot System has 6 D.O.F surgical tool
Pitch
Roll
RCM (Trocar point)
Active arm (Robot arm)Total 2-DoF
Elbow : 1 DOF
Inner rotation : 1 DOFWrist : 2 DOF
Outer rotation : 1 DOF
Translation : 1 DOF
Surgical toolElbow type : 6-DoF
16

We researches two types of master for SPS Robot System
Pen-type master6 D.O.F Link-type masterfor our SPS robot system 17
Less inertiaLarge workspace

Base : 2 DOF
Translation: 1 DOF
Rotation: 1 DOF
Wrist : 2 DOF
4 DOF (without grip)
Elbow : 1 DOF
Inner rotation : 1 DOF
Wrist : 2 DOF
Outer rotation : 1 DOF
Translation : 1 DOF
6 DOF (without grip)
Base : 2 DOF (Active arm)
[ Slave system ] [Link-type master device ]
Proposed Link-type master has 6 D.O.F
18

Proposed Link-type master performed peg-transfer experiment
19

Pen is the most friendly tool in human-life
• Light weight• Intuitive(easy to learn)• Low cost• Easy to set up• Use Vibrotactile
feedback to mimicking kinesthetic feedback
• Light weight• Friendly
(Short training time)• Kinesthetic feedback
is available• High accuracy• Difficult to set up in the
operating room • bulky• High cost• Long training time
• Impossible kinesthetic feedback
20
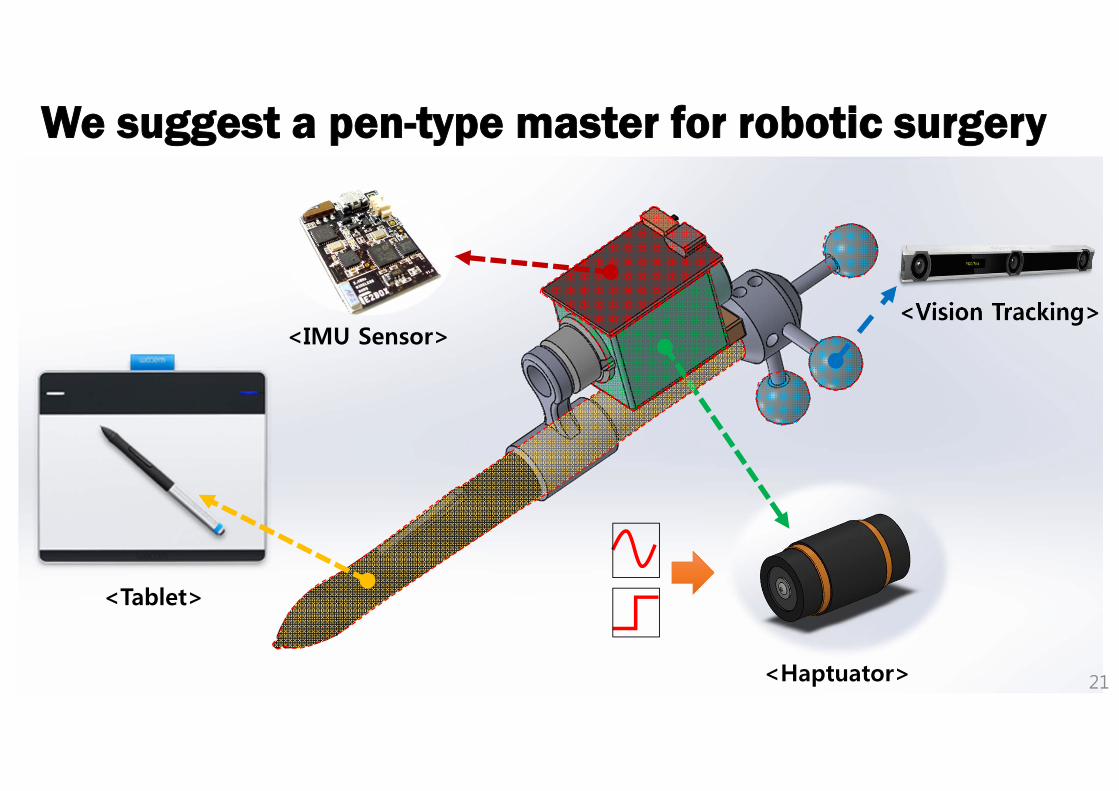
<IMU Sensor><Vision Tracking>
<Haptuator>
<Tablet>
We suggest a pen-type master for robotic surgery
21

We are trying to adapt vision tracking technology on a pen-type master
22

We performed a knot-tying simulation to prove vibrotactile feedback can improve the surgical task.
<Suture(Prolene 5-0)>
Breaking Suture is the most occurring problem in Robotic Minimally Invasive Surgery.
The value of haptic feedback in conventional and robot-assisted minimal invasive surgery and virtual reality training: a current review, Surgical Endoscopy, vol. 23, no. 6, pp. 1180-1190, 2009 23

To verify a feasibility of pen-type master, we designed a simulator for knot-tying simulation
< Knot-Tying Simulator >
Load Cell
MotorSuture Pulling
24

0 1 2 3 4 5 6 70
1
2
3
4
5
6
7
8
9
Time (sec)
Sut
ure
tens
ion
(N)
Without Vibrotactile Feedback
0 1 2 3 4 5 6 70
1
2
3
4
5
6
7
8
9With Vibrotactile Feedback
Time (sec)
Sut
ure
tens
ion
(N)
<Without vibrotactile feedback><With vibrotactile feedback>
The result shows that using vibrotactilefeedback can improvesuturing task.
With Vibration
WithoutVibration
In 3s
Over3s
In3s
Over3s
Not enoughforce 4 2
Adequatepoint 11 1 4
Break 2
25
We compared the user's mission success rates with and without vibration feedback
For using a vibrotactile feedback, we need to sensing a force from a surgical tool
Adequatepoint
Adequatepoint
Not enoughforce
start startBreak
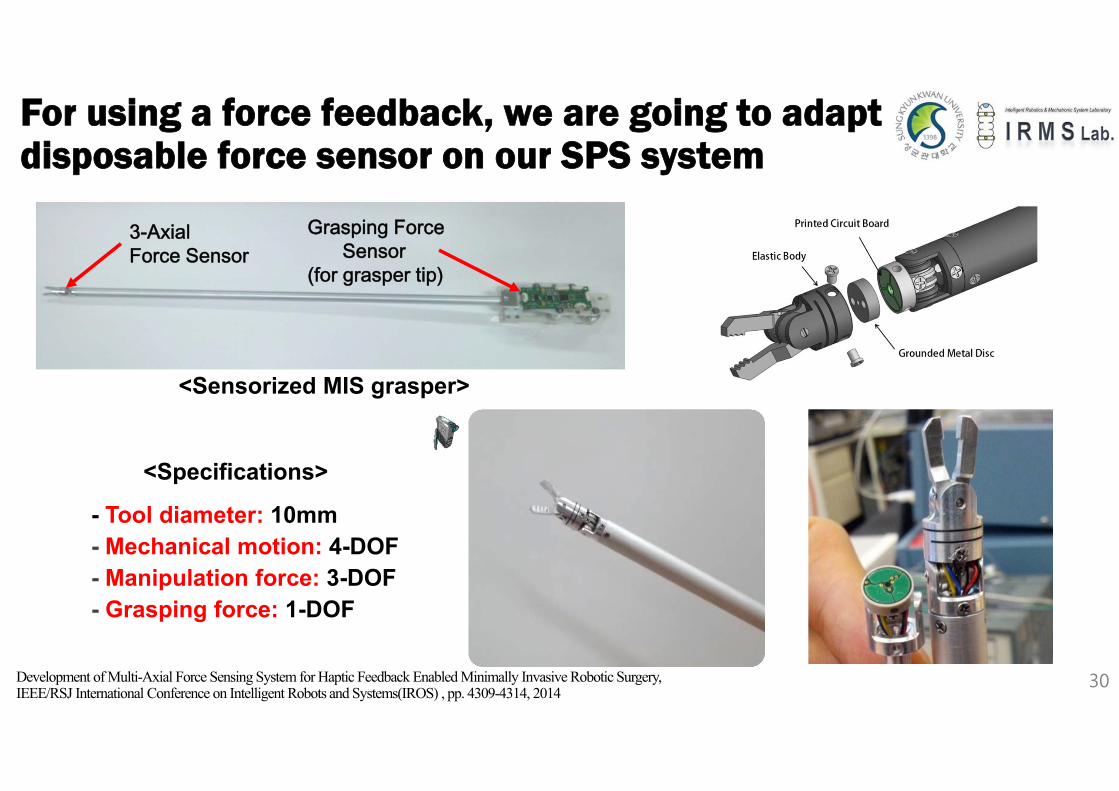
Grasping ForceSensor
(for grasper tip)
3-AxialForce Sensor
30
For using a force feedback, we are going to adapt disposable force sensor on our SPS system

- 3 axial force sensor• 3 axial manipulation force
- Torque sensor• Single axial grasping force
For using a force feedback, we are going to adapt disposable force sensor on our SPS system
31
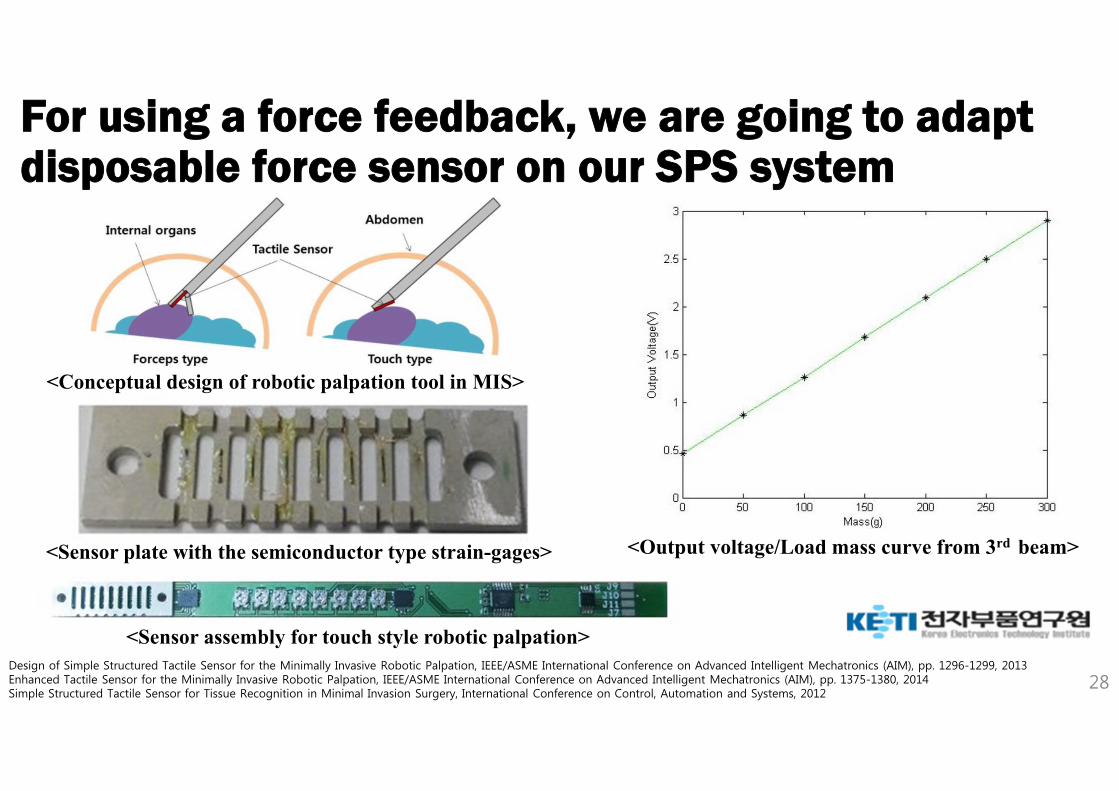
Design of Simple Structured Tactile Sensor for the Minimally Invasive Robotic Palpation, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pp. 1296-1299, 2013 Enhanced Tactile Sensor for the Minimally Invasive Robotic Palpation, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pp. 1375-1380, 2014Simple Structured Tactile Sensor for Tissue Recognition in Minimal Invasion Surgery, International Conference on Control, Automation and Systems, 2012
28
<Conceptual design of robotic palpation tool in MIS>
<Sensor plate with the semiconductor type strain-gages>
<Sensor assembly for touch style robotic palpation>
<Output voltage/Load mass curve from 3rd beam>
For using a force feedback, we are going to adapt disposable force sensor on our SPS system

Discussions•Reliability/ Safety•Cost•Patient benefit•Surgeon benefit•Cutaneous pattern
29

Thank you
30
Acknowledgement to
Hyundai Heavy Industry Co.The University of Texas, Health Science Center, HoustonProf. Hyouk Ryeol Choi, SungKyunKwan UniversityDr. Jung Hoon Hwang, Korea Electronics Technology Institute
Dong-Soo Kwon ([email protected])

















![Vibrotactile sense in median 071218 - lup.lub.lu.selup.lub.lu.se/search/ws/files/5318626/1057210.pdf · "Vibrotactile sense in median and ulnar nerve ... [large fibre neuropathy]](https://static.fdocuments.us/doc/165x107/5b1693297f8b9a4a6d8cc088/vibrotactile-sense-in-median-071218-luplubluseluplublusesearchwsfiles5318626.jpg)