4B. Non-Keplerian Motion - LTAS-SDRG :: Welcome ! · 2012-11-07 · J.E. Prussing, B.A. Conway,...
133
Gaëtan Kerschen Space Structures & Systems Lab (S3L) 4B. Non-Keplerian Motion Astrodynamics (AERO0024)
Transcript of 4B. Non-Keplerian Motion - LTAS-SDRG :: Welcome ! · 2012-11-07 · J.E. Prussing, B.A. Conway,...
Gaëtan Kerschen
Space Structures &
Systems Lab (S3L)
4B. Non-Keplerian Motion
Astrodynamics (AERO0024)

2
Previous Lecture: The Orbit in Space
3.3 INERTIAL FRAMES
3.3.1 ICRS
3.3.2 ICRF
3.4 COORDINATE SYSTEMS
3.5 COORDINATE TYPES

3
Previous Lecture: Dominant Perturbations
4.1 DOMINANT PERTURBATIONS
4.1.1 Earth’s gravity field
4.1.2 Atmospheric drag
4.1.1 Third-body perturbations
4.1.2 Solar radiation pressure

2. Two-body
problem 4.1 Dominant
perturbations
Orbital elements
(a,e,i,Ω,ω) are constant
Real satellites may undergo
perturbations
This lecture:
1. Effects of these perturbations on the orbital elements ?
2. Computation of these effects ?
5
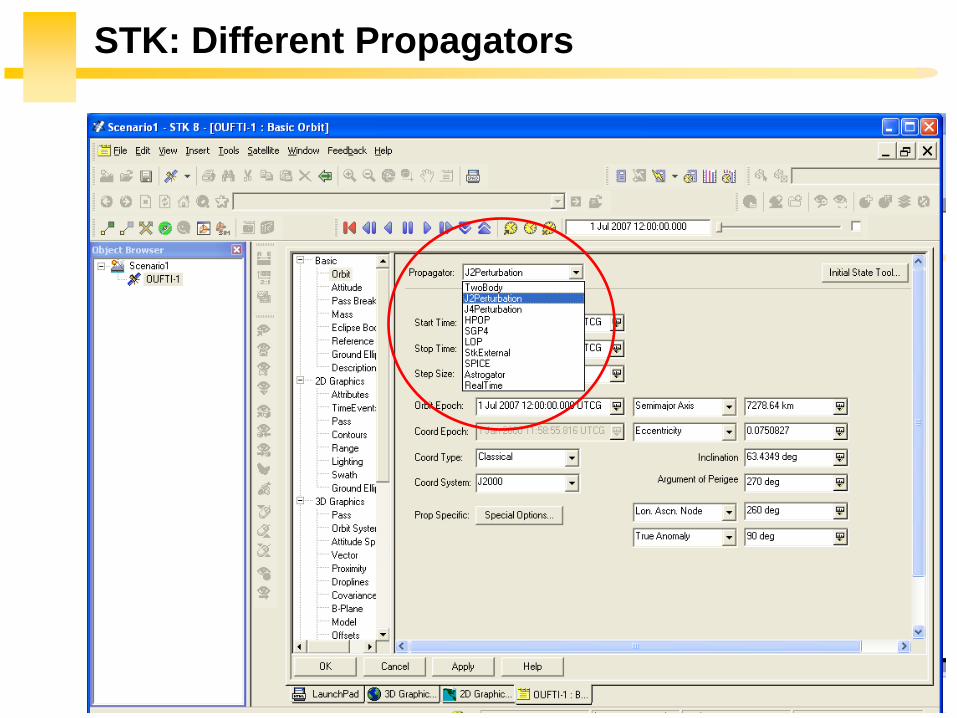
STK: Different Propagators

6
Why Different Propagators ?
Analytic propagation:
Better understanding of the perturbing forces.
Useful for mission planning (fast answer): e.g., lifetime
computation.
Numerical propagation:
The high accuracy required today for satellite orbits can only be
achieved by using numerical integration.
Incorporation of any arbitrary disturbing acceleration
(versatile).

7
4. Non-Keplerian Motion
2
2
(1 )
sin
sin 1 cos
a e
N
i e
4.2 Analytic treatment
4.3 Numerical methods
nt 1nt
r
4.4 Geostationary satellites

8
4. Non-Keplerian Motion
4.2 Analytic treatment
4.2.1 Variation of parameters
4.2.2 Non-spherical Earth
4.2.3 J2 propagator in STK
4.2.4 Atmospheric drag
4.2.5 Third-body perturbations
4.2.6 SGP4 propagator in STK
4.2.7 Solar radiation pressure
2
2
(1 )
sin
sin 1 cos
a e
N
i e

9
Analytic Treatment: Definition
Position and velocity at a requested time are computed
directly from initial conditions in a single step.
Analytic propagators use a closed-form solution of the
time-dependent motion of a satellite.
Mainly used for the two dominant perturbations, drag and
earth oblateness.
4.2 Analytic treatment

10
Analytic Treatment: Pros and Cons
Useful for mission planning and analysis (fast and insight):
Though the numerical integration methods can generate more
accurate ephemeris of a satellite with respect to a complex force
model, the analytical solutions represent a manifold of solutions for
a large domain of initial conditions and parameters.
But less accurate than numerical integration.
Be aware of the assumptions made !
4.2 Analytic treatment

11
Assumption for Analytic Developments
The magnitude of the disturbing force is assumed to be
much smaller than the magnitude of the attraction of the
satellite for the primary.
3 perturbedr
r r a
perturbed a r
4.2 Analytic treatment

12
Variation of Parameters (VOP)
Originally developed by Euler and improved by Lagrange
(conservative) and Gauss (nonconservative).
It is called variation of parameters, because the orbital
elements (i.e., the constant parameters in the two-body
equations) are changing in the presence of perturbations.
The VOP equations are a system of first-order ODEs that
describe the rates of change of the orbital elements.
4.2.1 Variation of parameters
, , , , , ?a i e M

13
Disturbing Acceleration (Specific Force)
ˆ ˆ ˆRperturbed R T NT N a F e e e
2
4.2.1 Variation of parameters
Rotating basis whose
origin is fixed to the
satellite

14
Perturbation Equations (Gauss)
4.2.1 Variation of parameters
2a
Chapter 2
2
2
2
2
aa
2
h
r
2 2
2
1 sin sin
1 cos
h r e er r
e h h
(1)
(2)
(3)
The generating solution is that of the 2-body problem
ˆ ˆR Tr r rR r T Fr F e e (4)
Time rate-of-change
of the work done by
the disturbing force

15
Perturbation Equations (Gauss)
4.2.1 Variation of parameters
(1)
(2)
(3)
(4)
2 2 2
2
2 sin 2sin
2 sin 1 cos
a e h a ha R T e R T
h r h r
aRe T e
h
2(1 )h a e
3
22 sin 1 cos
1
aa Re T e
e
Chapter 2

16
Perturbation Equations (Gauss)
3
22 Resin 1 cos
1
aa T e
e
2(1 )
sin cos cosa e
e R T E
2
2cos(1 )
1 cos
Na ei
e
J.E. Prussing, B.A. Conway, Orbital Mechanics, Oxford University Press
4.2.1 Variation of parameters
2 sin 2 cos1 (1 )cos cos
1 cos
T ea ei R
e e
2 2(1 ) 2 cos cos sin 2 cos, with
1 cos
e R e e T eaM nt
e e
2
2sin(1 )
sin 1 cos
Na e
i e

17
Perturbation Equations (Gauss)
Limited to eccentricities less than 1.
Singular for e=0, sin i=0 (use of equinoctial elements).
In what follows, we apply the Gauss equations to Earth
oblateness and drag. Analytical expressions for third-body
and solar radiation forces are far less common, because
their effects are much smaller for many orbits.
4.2.1 Variation of parameters

18
Non-spherical Earth: J2
Focus on the oblateness through the first zonal harmonic,
J2 (tesseral and sectorial coefficients ignored).
The J2 effect can still be viewed a small perturbation when
compared to the attraction of the spherical Earth.
4.2.2 Non-spherical Earth

19
Disturbing Acceleration (Specific Force)
2 2 222
4
3 1 3sin sinsin sin cos sin sin cos
2r T N
J R ii i i
r
F e e e
4.2.2 Non-spherical Earth
2 2
2
3sin 11
2
satRU J
r r
1 1 ˆˆ ˆ with cos
Ur r r
F r φ λ
Chapter 4A

20
Physical Interpretation of the Perturbation
2 2 222
4
3 1 3sin sinsin sin cos sin sin cos
2r T N
J R ii i i
r
F e e e
Gravitational force does no longer act through the Earth’s
center.
Depending whether
spacecraft is ascending
or descending
(net torque)
4.2.2 Non-spherical Earth

21
Physical Interpretation of the Perturbation
The oblateness means that the force of gravity is no longer
within the orbital plane: non-planar motion will result.
The equatorial bulge exerts a force that pulls the satellite
back to the equatorial plane and thus tries to align the
orbital plane with the equator.
Due to its angular momentum, the orbit behaves like a
spinning top and reacts with a precessional motion of the
orbital plane (the orbital plane of the satellite to rotate in
inertial space).
4.2.2 Non-spherical Earth

22
Physical Interpretation of the Perturbation
4.2.2 Non-spherical Earth

23
Effect of Perturbations on Orbital Elements
Secular rate of change: average rate of change over many
orbits.
Periodic rate of change: rate of change within one orbit
(J2: ~ 8-10km with a period equal to the orbital period).
4.2.2 Non-spherical Earth

24
Effect of Perturbations on Orbital Elements
Periodic
Secular
4.2.2 Non-spherical Earth

25
Secular Effects on Orbital Elements
Nodal regression: regression of the nodal line:
Apsidal rotation: rotation of the apse line:
Mean anomaly.
No secular variations for a, e, i.
4.2.2 Non-spherical Earth
2
2
2 2 7 / 20
1 3cos
2 (1 )
T
avg
J Rdt i
T e a
2
22
2 2 7 / 20
1 34 5sin
4 (1 )
T
avg
J Rdt i
T e a
26
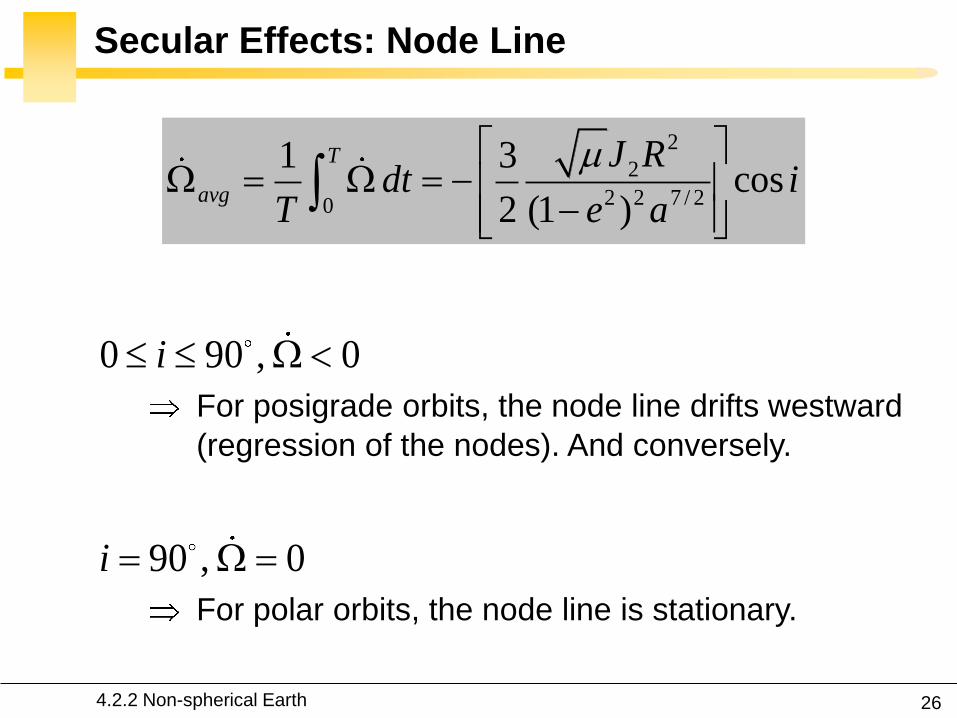
Secular Effects: Node Line
2
2
2 2 7 / 20
1 3cos
2 (1 )
T
avg
J Rdt i
T e a
For posigrade orbits, the node line drifts westward
(regression of the nodes). And conversely.
0 90 , 0i
For polar orbits, the node line is stationary.
90 , 0i
4.2.2 Non-spherical Earth

Vallado, Fundamental of
Astrodynamics and
Applications, Kluwer, 2001.

28
Exploitation: Sun-Synchronous Orbits
The orbital plane makes a constant angle with the radial
from the sun:
4.2.2 Non-spherical Earth

29
Exploitation: Sun-Synchronous Orbits
The orbital plane must rotate in inertial space with the
angular velocity of the Earth in its orbit around the Sun:
360º per 365.26 days or 0.9856º per day
The satellite sees any given swath of the planet under
nearly the same condition of daylight or darkness day after
day.
4.2.2 Non-spherical Earth
30
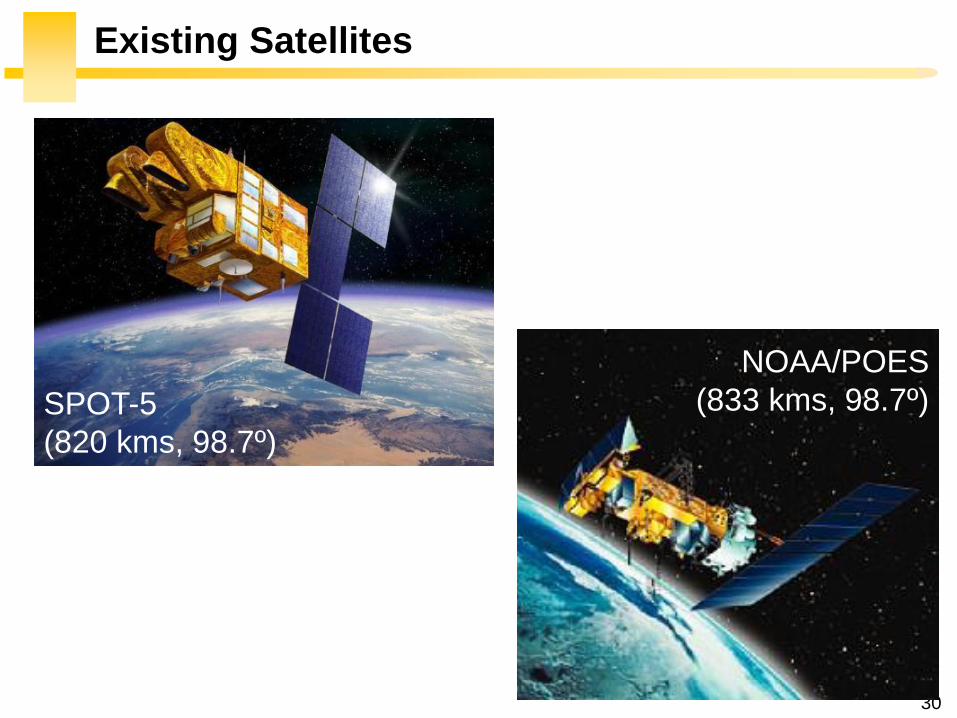
Existing Satellites
SPOT-5
(820 kms, 98.7º)
NOAA/POES
(833 kms, 98.7º)

31
Secular Effects: Apse Line
2
22
2 2 7 / 20
1 34 5sin
4 (1 )
T
avg
J Rdt i
T e a
The perigee advances in the direction of the motion
of the satellite. And conversely.
0 63.4 or 116.6 180 , 0i i
The apse line does not move.
63.4 or 116.6 , 0i i
4.2.2 Non-spherical Earth

Vallado, Fundamental of
Astrodynamics and
Applications, Kluwer, 2001.

33
Example of Apsidal Rotation
Apogee: 3000km
Perigee: 500km
Incl.: 90º
4.2.2 Non-spherical Earth
34
Exploitation: Molniya Orbits
A geostationary satellite cannot view effectively the far
northern latitudes into which Russian territory extends
(+ costly plane change maneuver for the launch vehicle !)
Molniya telecommunications satellites are launched from
Plesetsk (62.8ºN) into 63º inclination orbits having a
period of 12 hours.
3
2 the apse line is 53000km long.ellip
aT
4.2.2 Non-spherical Earth
35
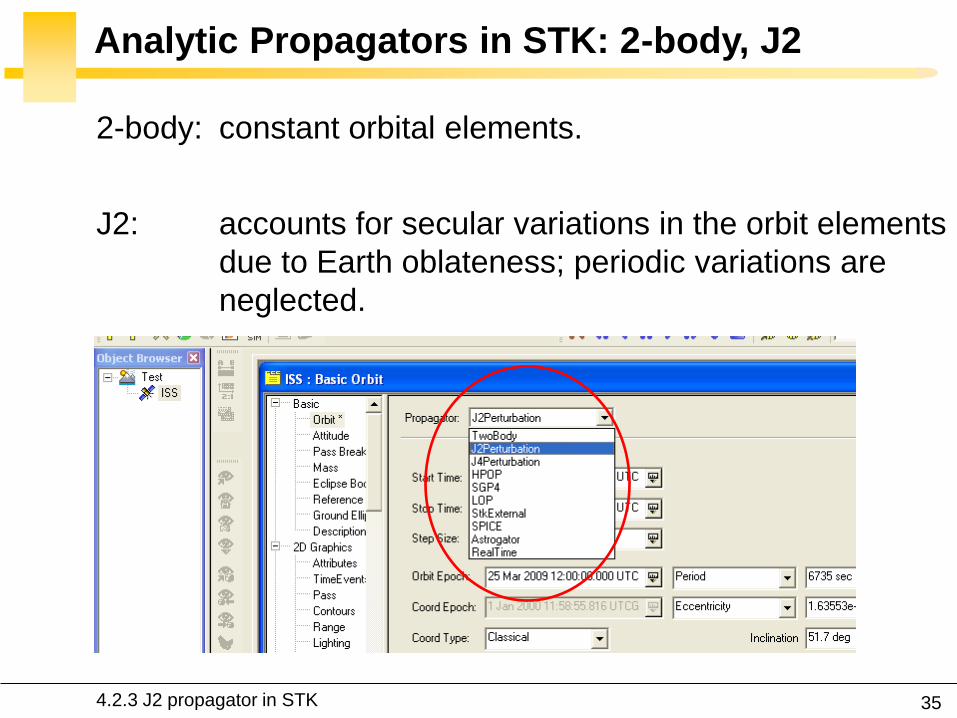
Analytic Propagators in STK: 2-body, J2
2-body: constant orbital elements.
J2: accounts for secular variations in the orbit elements
due to Earth oblateness; periodic variations are
neglected.
4.2.3 J2 propagator in STK

36
J2 Propagator: Underlying Equations
4.2.3 J2 propagator in STK

37
2-body and J2 Propagators Applied to ISS
Nodal
regression
of the ISS
4.2.3 J2 propagator in STK

38
2-body and J2 Propagators Applied to ISS
Two-body propagator J2 propagator
4.2.3 J2 propagator in STK
39
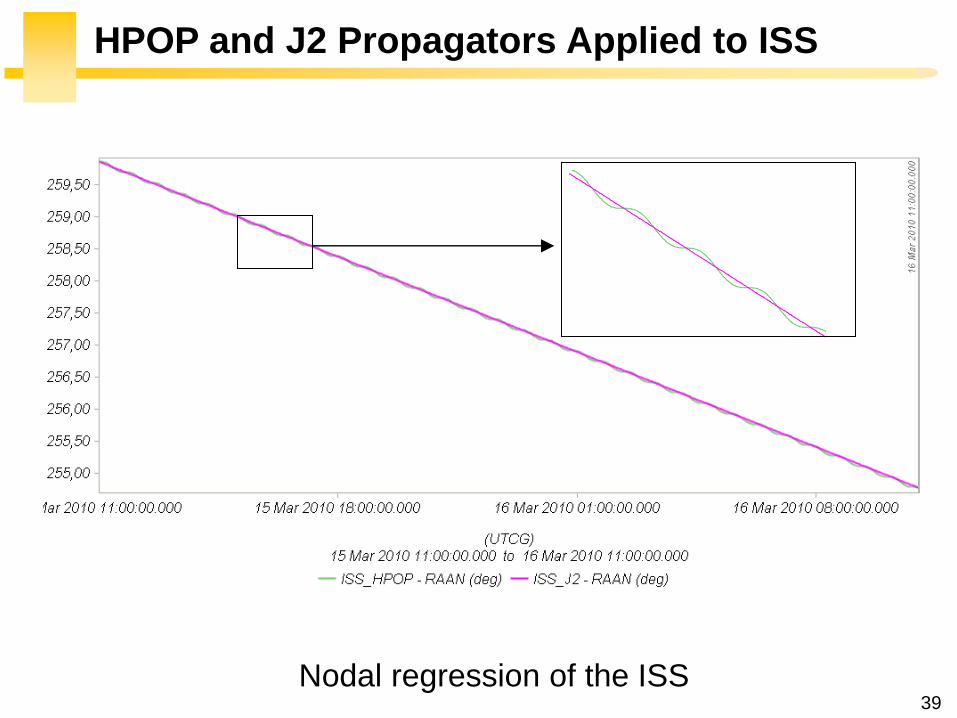
HPOP and J2 Propagators Applied to ISS
Nodal regression of the ISS

40
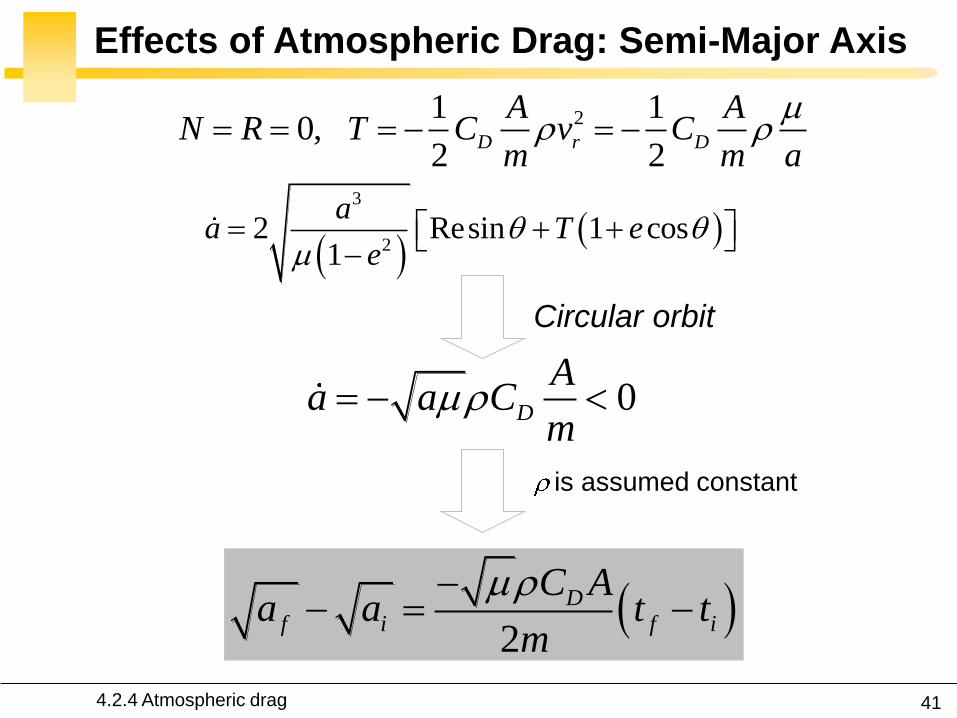
Effects of Atmospheric Drag: Semi-Major Axis
2a
Lecture 2
2
2
2
2
aa
>0
Because drag causes the dissipation of mechanical energy
from the system, the semimajor axis contracts.
4.2.4 Atmospheric drag
Drag paradox: the effect of atmospheric drag is to increase
the satellite speed and kinetic energy !
41
Effects of Atmospheric Drag: Semi-Major Axis
21 10,
2 2D r D
A AN R T C v C
m m a
0D
Aa a C
m
2
Df i f i
C Aa a t t
m
is assumed constant
4.2.4 Atmospheric drag
3
22 Resin 1 cos
1
aa T e
e
Circular orbit

42
Effects of Atmospheric Drag: Orbit Plane
0N
2
2sin(1 )
sin 1 cos
Na e
i e
2
2cos(1 )
1 cos
Na ei
e
The orientation of the orbit plane is not changed by drag.
4.2.4 Atmospheric drag

43
Effects of Atmospheric Drag: Apogee, Perigee
Apogee height changes drastically, perigee height remains
relatively constant.
4.2.4 Atmospheric drag
Vallado, Fundamental of Astrodynamics and Applications, Kluwer, 2001.

44
Effects of Atmospheric Drag: Eccentricity
Vallado, Fundamental of Astrodynamics and Applications, Kluwer, 2001.
4.2.4 Atmospheric drag

45
Early Reentry of Skylab (1979)
Increased solar activity, which
increased drag on Skylab, led to
an early reentry.
Earth reentry footprint could not
be accurately predicted (due to
tumbling and other parameters).
Debris was found around
Esperance (31–34°S, 122–
126°E). The Shire of Esperance
fined the United States $400 for
littering, a fine which, to this day,
remains unpaid.
4.2.4 Atmospheric drag

46
Lost of ASCA Satellite (2000)
July 15, 2000: a strong solar
flare heated the Earth’s
atmosphere, increasing the
air density to a value 100
times greater than that for
which its ADCS had been
designed to cope. The
magnetorquers were unable
to compensate and the
satellite was lost.
http://heasarc.gsfc.nasa.gov/docs/asca/safemode.html
4.2.4 Atmospheric drag
47
Effects of Third-Body Perturbations
The only secular perturbations are in the node and in the
perigee.
For near-Earth orbits, the dominance of the oblateness
dictates that the orbital plane regresses about the polar
axis. For higher orbits, the regression will be about some
mean pole lying between the Earth’s pole and the ecliptic
pole.
Many geosynchronous satellites launched 30 years ago now have inclinations of up to ±15º collision avoidance
as the satellites drift back through the GEO belt.
4.2.5 Third-body perturbations

48
Effects of Third-Body Perturbations
Vallado, Fundamental of Astrodynamics and Applications, Kluwer, 2001.
The Sun’s attraction
tends to turn the
satellite ring into the
ecliptic. The orbit
precesses about the
pole of the ecliptic.
4.2.5 Third-body perturbations

49
STK: Analytic Propagator (SGP4)
The J2 propagator does not include drag.
SGP4, which stands for Simplified General Perturbations
Satellite Orbit Model 4, is a NASA/NORAD algorithm.
4.2.6 SGP4 propagator in STK

50
STK: Analytic Propagator (SGP4)
Several assumptions; propagation valid for short durations
(3-10 days).
TLE data should be used as the input (see Lecture 03).
It considers secular and periodic variations due to Earth
oblateness, solar and lunar gravitational effects, and
orbital decay using a drag model.
4.2.6 SGP4 propagator in STK

51
SGP4 Applied to ISS: RAAN
4.2.6 SGP4 propagator in STK

52
SGP4 Applied to ISS: Semi-Major Axis
4.2.6 SGP4 propagator in STK

53
Further Reading on the Web Site
4.2.6 SGP4 propagator in STK

54
Effects of Solar Radiation Pressure
The effects are usually small for most satellites.
Satellites with very low mass and large surface area are
more affected.
4.2.7 Solar radiation pressure

Vallado, Fundamental of
Astrodynamics and
Applications, Kluwer,
2001.
56
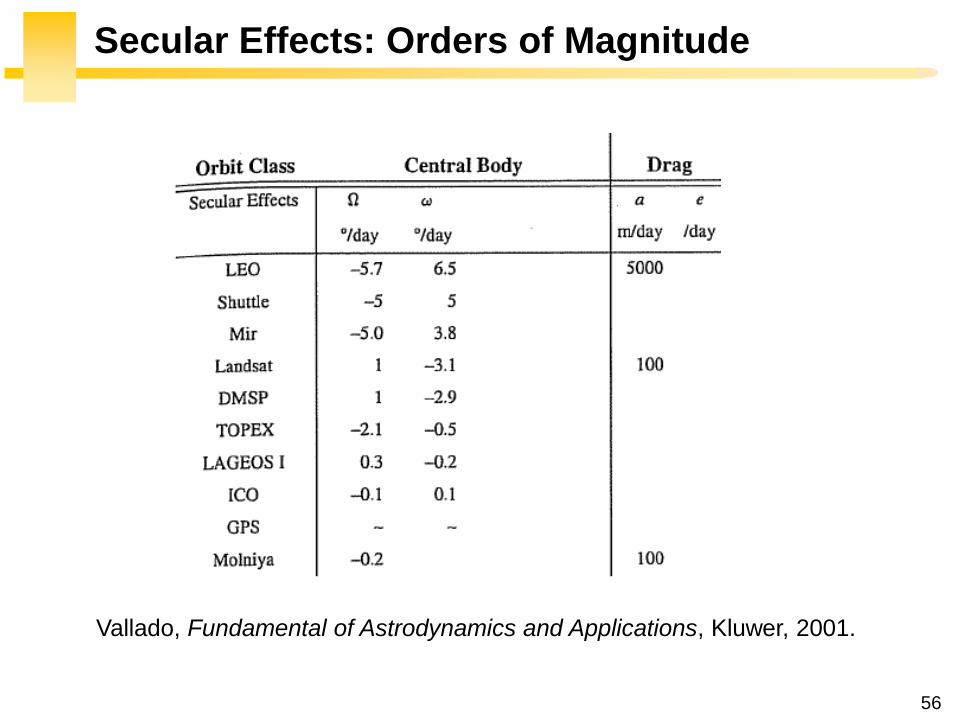
Secular Effects: Orders of Magnitude
Vallado, Fundamental of Astrodynamics and Applications, Kluwer, 2001.
57
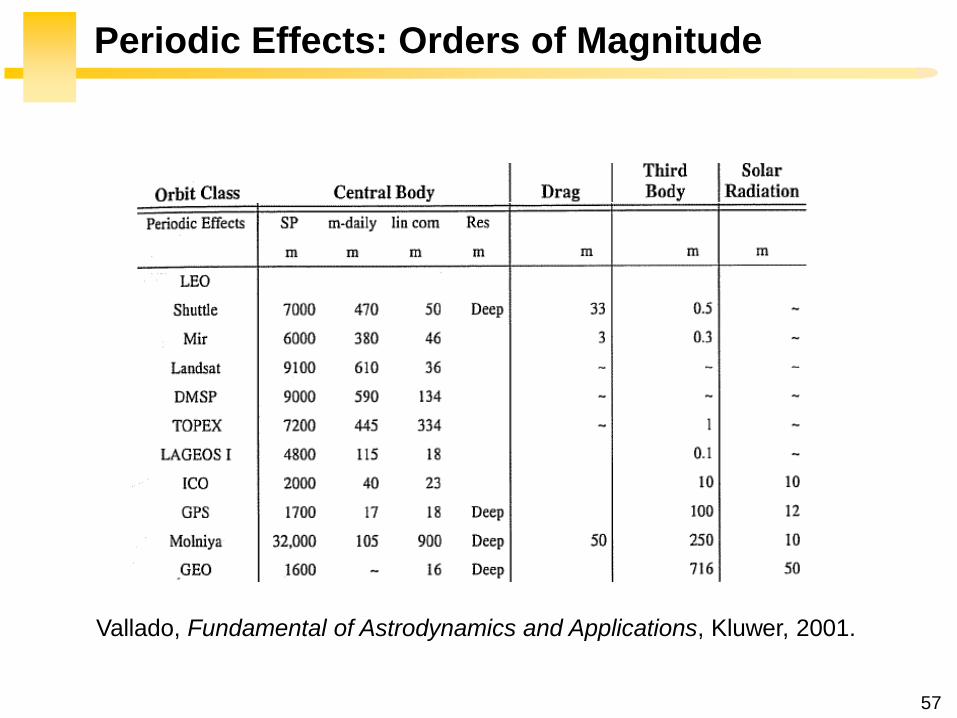
Periodic Effects: Orders of Magnitude
Vallado, Fundamental of Astrodynamics and Applications, Kluwer, 2001.

58
4. Non-Keplerian Motion
2
2
(1 )
sin
sin 1 cos
a e
N
i e
4.3 Numerical methods
4.3.1 Orbit prediction
4.3.2 Numerical integration
4.3.3 Single-step methods: Runge-Kutta
4.3.4 Multi-step methods
4.3.5 Integrator and step size selection
4.3.6 ISS example
nt 1nt
r

59
2-body: analytic propagator (constant orbital elements).
J2: analytic propagator (secular variations in the orbit
elements due to Earth oblateness.
HPOP: numerical integration of the equations of motion
(periodic and secular effects included).
STK Propagators
4.3.1 Orbit prediction
Accurate
Versatile
Errors accumulation
for long intervals
Computationally
intensive
60
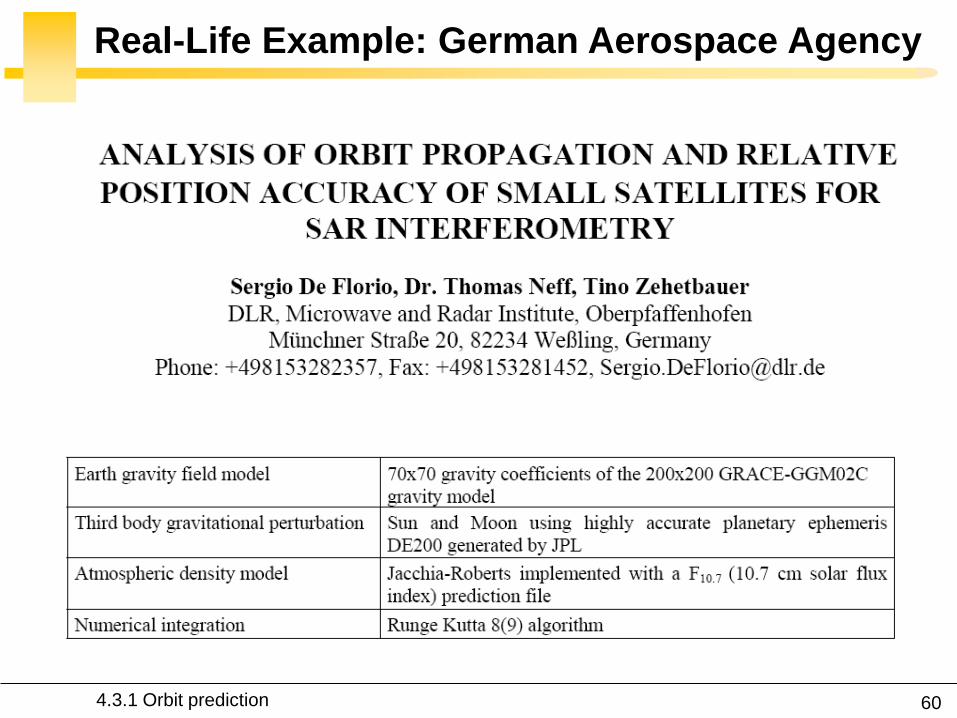
Real-Life Example: German Aerospace Agency
4.3.1 Orbit prediction

61
Real-Life Example: German Aerospace Agency

62
Further Reading on the Web Site
4.3.1 Orbit prediction

63
Real-Life Example: Envisat
http://nng.esoc.esa.de/envisat/
ENVpred.html
4.3.1 Orbit prediction

Why do the
predictions degrade
for lower altitudes ?

65
NASA began the first complex numerical integrations
during the late 1960s and early 1970s.
Did you Know ?
1969 1968
4.3.1 Orbit prediction

66
What is Numerical Integration ?
1n nt t t
3 perturbedr
r r a
Given
Compute
( ), ( )n nt tr r
1 1( ), ( )n nt t r r
4.3.2 Numerical integration

67
State-Space Formulation
3 perturbedr
r r a
( , )f tu u
ru
r
6-dimensional
state vector
4.3.2 Numerical integration

68
How to Perform Numerical Integration ?
2( )( ) ( ) '( ) ''( ) ... ( )
2 !
ss
n n n n n s
h hf t h f t hf t f t f t R
s
Taylor series expansion
( )ntu
1( )nt u
4.3.2 Numerical integration

69
First-Order Taylor Approximation (Euler)
1
( ) ( ) ( )
( , )
n n n
n n n n
t t t t t
t f t
u u u
u u uEuler step
0 1 2 3 4 5 60
5
10
15
20
25
30
35
40
Time t (s)
x(t
)=t2
Exact solution
The stepsize has to be extremely
small for accurate predictions,
and it is necessary to develop
more effective algorithms.
along the tangent
4.3.2 Numerical integration

70
Numerical Integration Methods
1 1 1
1 0
m m
n j n j j n j
j j
t
u u u
0 0
Implicit, the solution method becomes
iterative in the nonlinear case
0 0 Explicit, un+1 can be deduced directly from
the results at the previous time steps
, =0
for 1
j j
j
Single-step, the system at time tn+1
only depends on the previous state tn
State vector
, 0
for 1
j j
j
Multi-step, the system at time tn+1 depends
several previous states tn,tn-1,etc.
4.3.2 Numerical integration

71
Examples: Implicit vs. Explicit
Trapezoidal rule (implicit)
nt 1nt
Euler forward (explicit)
nt 1nt
Euler backward (implicit)
nt 1nt
1n n nt u u u
1 1n n nt u u u
1
12
n n
n n t
u uu u
r
r
r
4.3.2 Numerical integration

72
A variety of methods has been applied in astrodynamics.
Each of these methods has its own advantages and
drawbacks:
Accuracy: what is the order of the integration scheme ?
Efficiency: how many function calls ?
Versatility: can it be applied to a wide range of problems ?
Complexity: is it easy to implement and use ?
Step size: automatic step size control ?
Why Different Methods ?
4.3.1 Orbit prediction

73
Runge-Kutta Family: Single-Step
Perhaps the most well-known numerical integrator.
Difference with traditional Taylor series integrators: the RK
family only requires the first derivative, but several
evaluations are needed to move forward one step in time.
Different variants: explicit, embedded, etc.
4.3.3 Single-step methods: Runge-Kutta

74
Runge-Kutta Family: Single-Step
with ( ) ( , )t f tu u 0 0( )t u u
1
1
s
n n i i
i
t b
u u k
1 1
1
1
,
, , 2...
n n
i
i n ij j n i
j
f t c t
f t a t c t i s
k u
k u k
Slopes at
various points
within the
integration step
4.3.3 Single-step methods: Runge-Kutta

75
Runge-Kutta Family: Single-Step
Butcher Tableau
The Runge-Kutta methods are fully described by the
coefficients:
c1
c2
cs
a21
as1
b1
as2
b2
as,s-1
bs-1 …
…
… … …
bs
1
1
1
1
1
0
s
i
i
i
i ij
j
b
c
c a
4.3.3 Single-step methods: Runge-Kutta

76
RK4 (Explicit)
1 2 3 41
2 2
6n n t
k k k ku u
Butcher Tableau
1
2 1
3 2
4 3
,
,2 2
,2 2
,
n n
n n
n n
n n
f t
t tf t
t tf t
f t t t
k u
k u k
k u k
k u k
4.3.3 Single-step methods: Runge-Kutta

77
RK4 (Explicit)
1 2 3 41
2 2
6n n t
k k k ku u
1
2 1
3 2
4 3
,
,2 2
,2 2
,
n n
n n
n n
n n
f t
t tf t
t tf t
f t t t
k u
k u k
k u k
k u k
Slope at the beginning
Slope at the midpoint (k1 is
used to determine the value of u Euler)
Slope at the midpoint (k2 is
now used)
Slope at the end
Estimated slope
(weighted average)
4.3.3 Single-step methods: Runge-Kutta
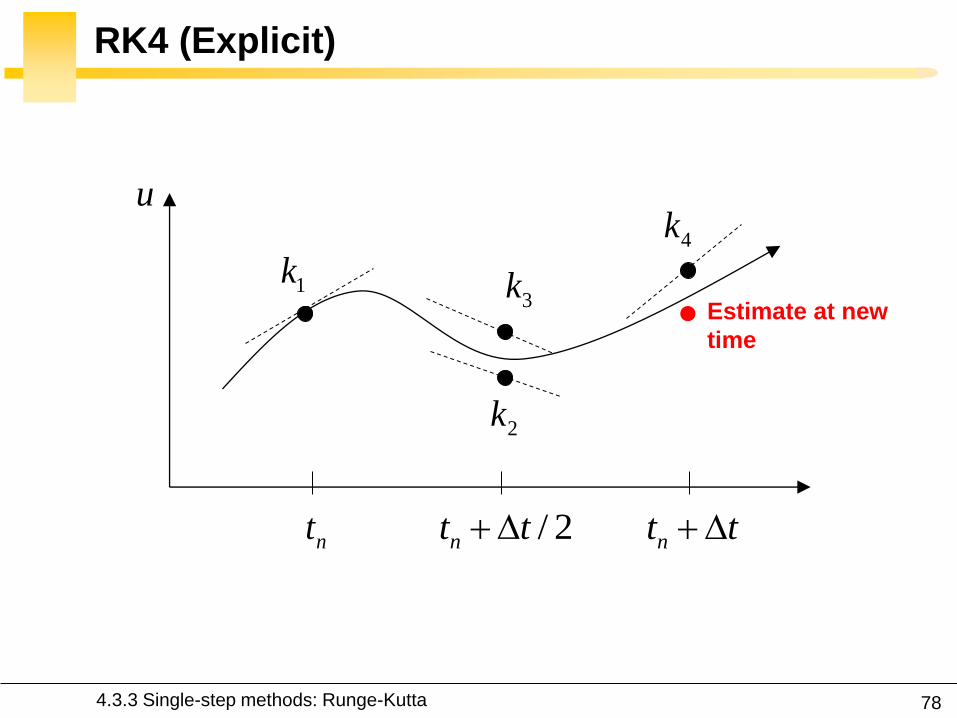
78
RK4 (Explicit)
nt / 2nt t nt t
1k3k
2k
4k
Estimate at new
time
u
4.3.3 Single-step methods: Runge-Kutta

79
RK4 (Explicit)
The local truncation error for a 4th order RK is O(h5).
The accuracy is comparable to that of a 4th order Taylor
series, but the Runge-Kutta method avoids the
calculation of higher-order derivatives.
Easy to use and implement.
The step size is fixed.
4.3.3 Single-step methods: Runge-Kutta

80
RK4 in STK
4.3.3 Single-step methods: Runge-Kutta
81
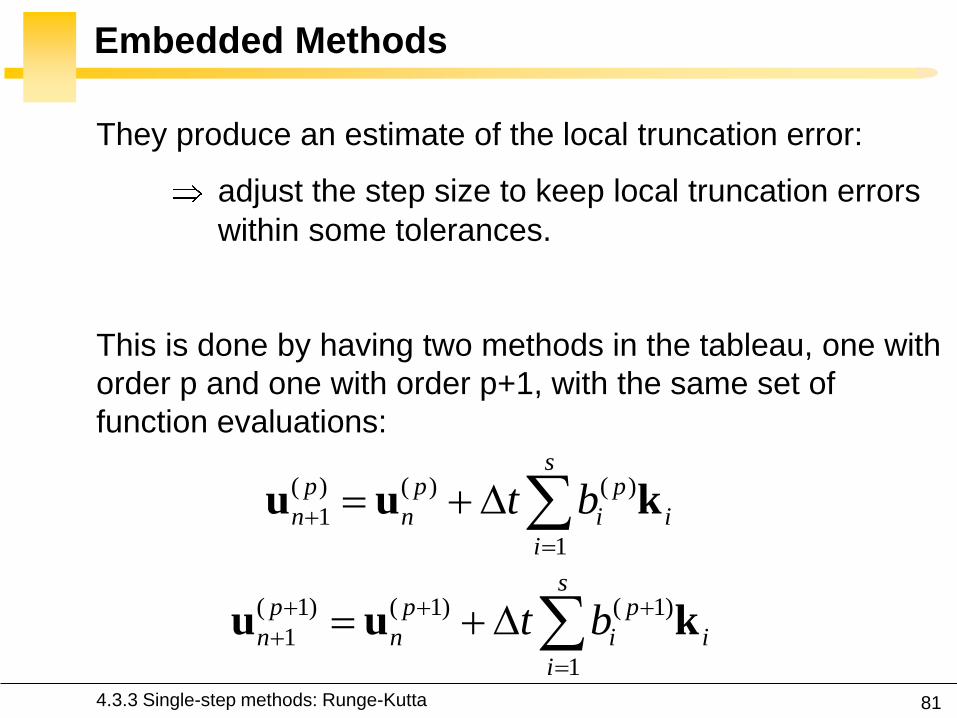
Embedded Methods
They produce an estimate of the local truncation error:
adjust the step size to keep local truncation errors
within some tolerances.
This is done by having two methods in the tableau, one with
order p and one with order p+1, with the same set of
function evaluations:
( 1) ( 1) ( 1)
1
1
sp p p
n n i i
i
t b
u u k
( ) ( ) ( )
1
1
sp p p
n n i i
i
t b
u u k
4.3.3 Single-step methods: Runge-Kutta

82
Embedded Methods
The two different approximations for the solution at each
step are compared:
If the two answers are in close agreement, the approximation is
accepted.
If the two answers do not agree to a specified accuracy, the step
size is reduced.
If the answers agree to more significant digits than required, the
step size is increased.
4.3.3 Single-step methods: Runge-Kutta

83
Ode45 in Matlab / Simulink
Runge-Kutta (4,5) pair of Dormand and Prince:
Variable step size.
Matlab help: This should be the first solver you try
4.3.3 Single-step methods: Runge-Kutta

84
Ode45 in Matlab / Simulink
edit ode45
4.3.3 Single-step methods: Runge-Kutta

85
Ode45 in Matlab / Simulink
Be very careful with the default parameters !
options = odeset('RelTol',1e-8,'AbsTol',1e-8);
4.3.3 Single-step methods: Runge-Kutta

86
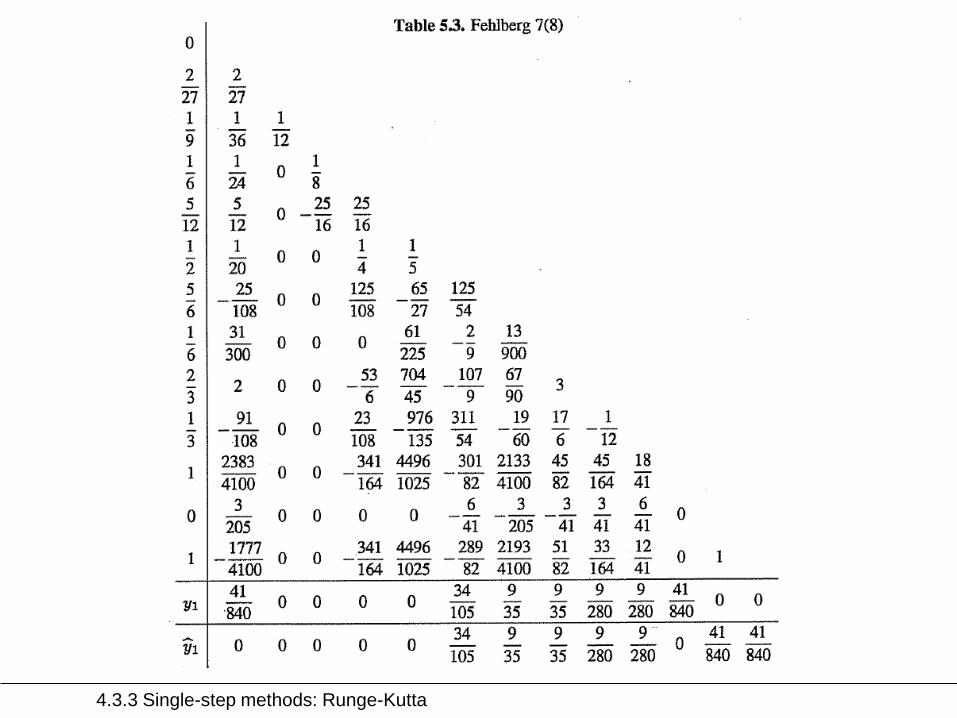
RKF 7(8): Default Method in STK
Runge-Kutta-Fehlberg integration method of 7th order
with 8th order error control for the integration step size.
4.3.3 Single-step methods: Runge-Kutta
88
Multi-Step Methods (Predictor-Corrector)
They estimate the state over time using previously
determined back values of the solution.
Unlike RK methods, they only perform one evaluation for
each step forward, but they usually have a predictor and a
corrector formula.
Adams(*) – Bashforth - Moulton, Gauss - Jackson.
(*) The first with Le Verrier to predict the existence and position of Neptune
4.3.4 Multi-step methods
89
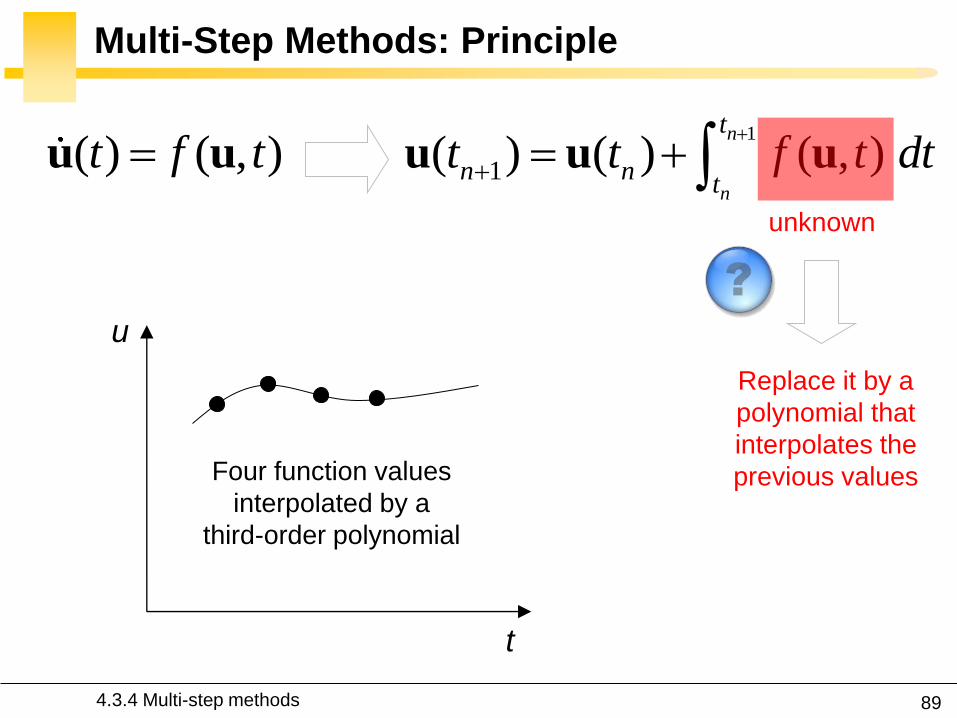
Multi-Step Methods: Principle
( ) ( , )t f tu u1
1( ) ( ) ( , ) n
n
t
n nt
t t f t dt
u u u
unknown
Replace it by a
polynomial that
interpolates the
previous values Four function values
interpolated by a
third-order polynomial
t
u
4.3.4 Multi-step methods

90
Multi-Step Methods: Initiation
with ( ) ( , )t f tu u 0 0( )t u u
What is the inherent problem ?
t
u
4.3.4 Multi-step methods

91
Multi-Step Methods: Initiation
Because these methods require back values, they are not
self-starting.
One may for instance use of a single-step method to
compute the first four values.
4.3.4 Multi-step methods

92
Gauss-Jackson in STK
One of the most recommendable fixed-stepsize multistep
methods for orbit computations.

93
Extrapolation Methods
Not discussed herein. More details in Montenbruck and Gill,
Satellite orbits, Springer, 2000.

94
Integrator Selection
4.3.5 Integrator and step size selection
Montenbruck and Gill,
Satellite orbits, Springer,
2000

95
Integrator Selection
Pros
Very fast
Cons
Special starting procedure
Fixed time steps
Error control
Pros
Plug and play
Error control
Cons
Slower
Multi-step Single step
4.3.5 Integrator and step size selection

96
Why is the Step Size So Critical ?
Theoretical arguments:
1. The accuracy and the stability of the algorithm are
directly related to the step size.
2. Nonlinear equations of motion.
Data for Landsat 4 and 6 in circular orbits around 800km
indicates that a one-minute step size yields about 47m
error.
A three-minute step size produces about a 900m error !
4.3.5 Integrator and step size selection

97
Why is the Step Size So Critical ?
More practical arguments:
1. The computation time is directly related to the
step size.
2. The particular choice of step size depends on the
most rapidly varying component in the disturbing
functions (e.g., 50 x 50 gravity field).
4.3.5 Integrator and step size selection

98
Appropriate Step Size
The problem of determining an appropriate step size is a
challenge in any numerical process.
Fixed step size: (rule of thumb for standard
applications).
But an algorithm with variable step size is really
helpful. The step size is chosen in such a way that
each step contributes uniformly to the total integration
error.
100
orbitTt
4.3.5 Integrator and step size selection

99
Three Examples: XMM / OUFTI-1 / ISS
Can you plot the step size vs. true anomaly ?
4.3.5 Integrator and step size selection
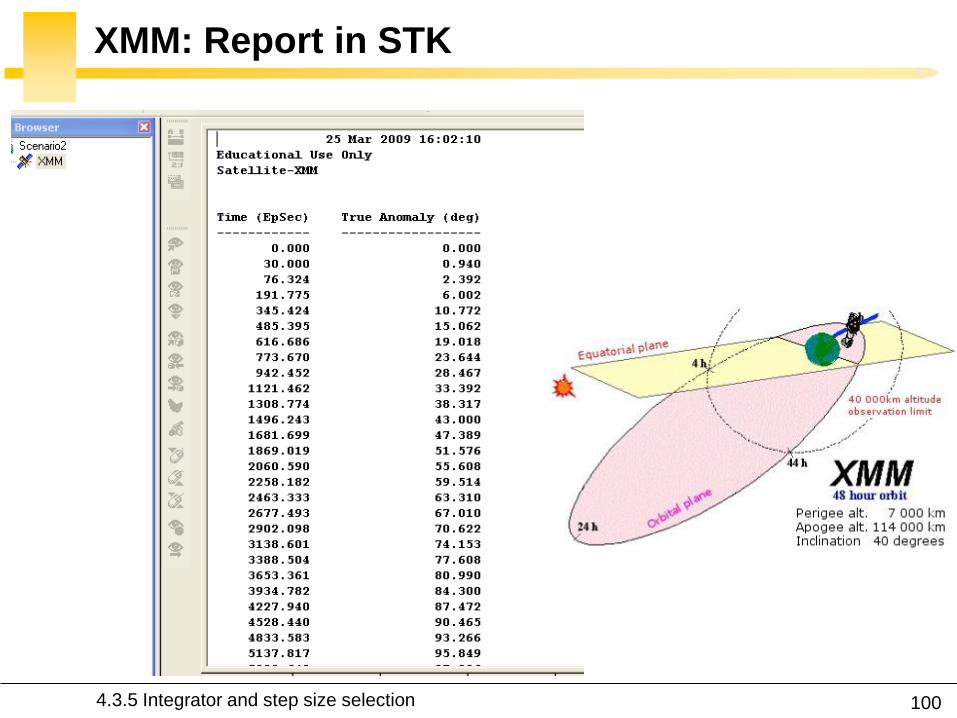
100
XMM: Report in STK
4.3.5 Integrator and step size selection

101
XMM (e~0.8)
0 50 100 150 200 250 300 350 4000
1000
2000
3000
4000
5000
6000
True anomaly (deg)
Ste
p s
ize
(s)
Postprocessing in Matlab
4.3.5 Integrator and step size selection
Reproduce this graph during
the exercise session !

0 50 100 150 200 250 300 350 40030
40
50
60
70
80
90
True anomaly (deg)
Ste
p s
ize
(s)
4.3.5 Integrator and step size selection
0 50 100 150 200 250 300 350 40030
35
40
45
50
55
60
65
70
True anomaly (deg)
Ste
p s
ize
(s)
OUFTI-1 (e~0.07)
ISS (e~0)

103
“Difficult” Orbits
Automatic time step is especially nice on highly eccentric
orbits (Molniya, XMM). These orbits are best computed
using variable step sizes to maintain some given level of
accuracy:
Without this variable step size, we waste a lot of time near
apoapsis, when the integration is taking too small a step.
Likewise, the integrator may not be using a small enough step
size at periapsis, where the satellite is traveling fast.
4.3.5 Integrator and step size selection

104
HPOP Propagator: ISS Example
1. Earth’s oblateness only
2. Drag only
3. Sun and moon only
4. SRP only
5. All together.
4.3.6 ISS example

105
Earth’s Oblateness Only: Ω
HPOP
J2
2-body
4.3.6 ISS example

106
Earth’s Oblateness Only: i, Ω, a
HPOP with central body (2,0 + WGS84_EGM96)
(without drag/SRP/Sun and Moon)
4.3.6 ISS example

107
Drag Only: i, Ω, a
HPOP with drag – Harris Priester
(without oblateness/SRP/Sun and Moon)
4.3.6 ISS example

108
Drag: Relationship with Eclipses

109
Drag: Lifetime (Satellite Tools)
4.3.6 ISS example

110
Sun and Moon Only
4.3.6 ISS example

111
Sun and Moon Only: i, Ω, a
HPOP with Sun and Moon
(without oblateness/SRP/drag)
4.3.6 ISS example

112
SRP Only: i, Ω, a
HPOP with SRP
(without oblateness/drag/Sun and Moon)
4.3.6 ISS example

113
SRP: Relationship with Eclipses

114
All Perturbations Together
4.3.6 ISS example

115
4. Non-Keplerian Motion
2
2
(1 )
sin
sin 1 cos
a e
N
i e
4.4 Geostationary satellites

116
Practical Example: GEO Satellites
Nice illustration of:
1. Perturbations of the 2-body problem.
2. Secular and periodic contributions.
3. Accuracy required by practical applications.
4. The need for orbit correction and thrust forces.
And it is a real-life example (telecommunications,
meteorology) !
4.4 GEO satellites

117
Three Main Perturbations for GEO Satellites
4.4 GEO satellites
1. Non-spherical Earth
2. SRP
3. Sun and Moon

118
Station Keeping of GEO Satellites
The effect of the perturbations is to cause the spacecraft
to drift away from its nominal station. If the drift was
allowed to build up unchecked, the spacecraft could
become useless.
A station-keeping box is defined by a longitude and a
maximum authorized distance for satellite excursions in
longitude and latitude.
For instance, TC2: -8º ± 0.07º E/W ± 0.05º N/S
4.4 GEO satellites

119
East-West and North-South Drift
4.4 GEO satellites
N/S drift
E/W drift
What are the perturbations generating these drifts ?
120
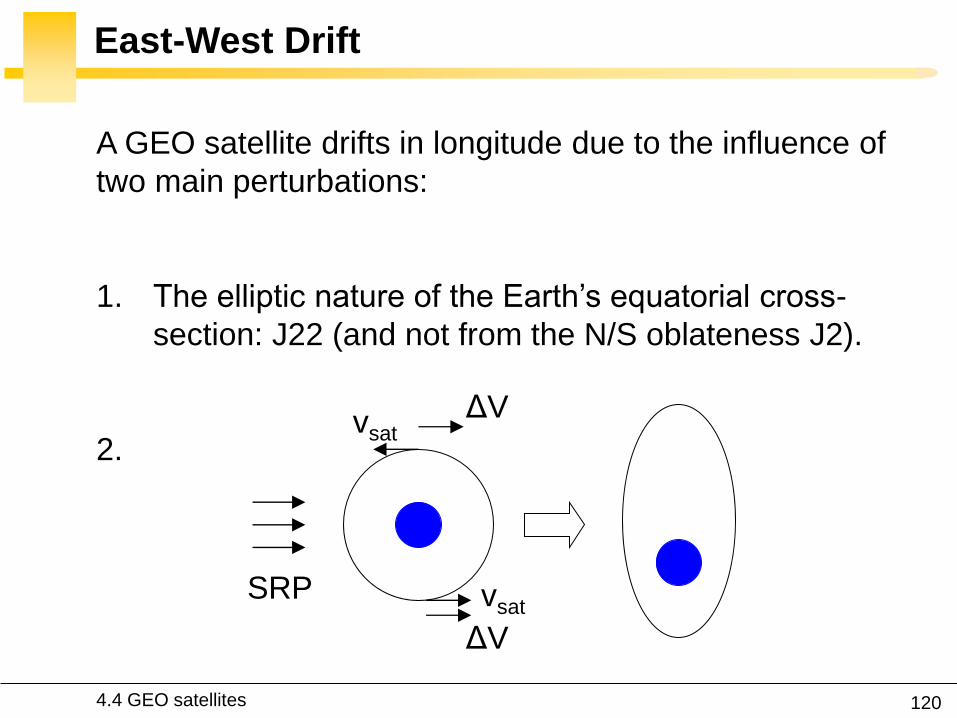
East-West Drift
4.4 GEO satellites
A GEO satellite drifts in longitude due to the influence of
two main perturbations:
1. The elliptic nature of the Earth’s equatorial cross-
section: J22 (and not from the N/S oblateness J2).
2.
ΔV
ΔV vsat
vsat SRP

121
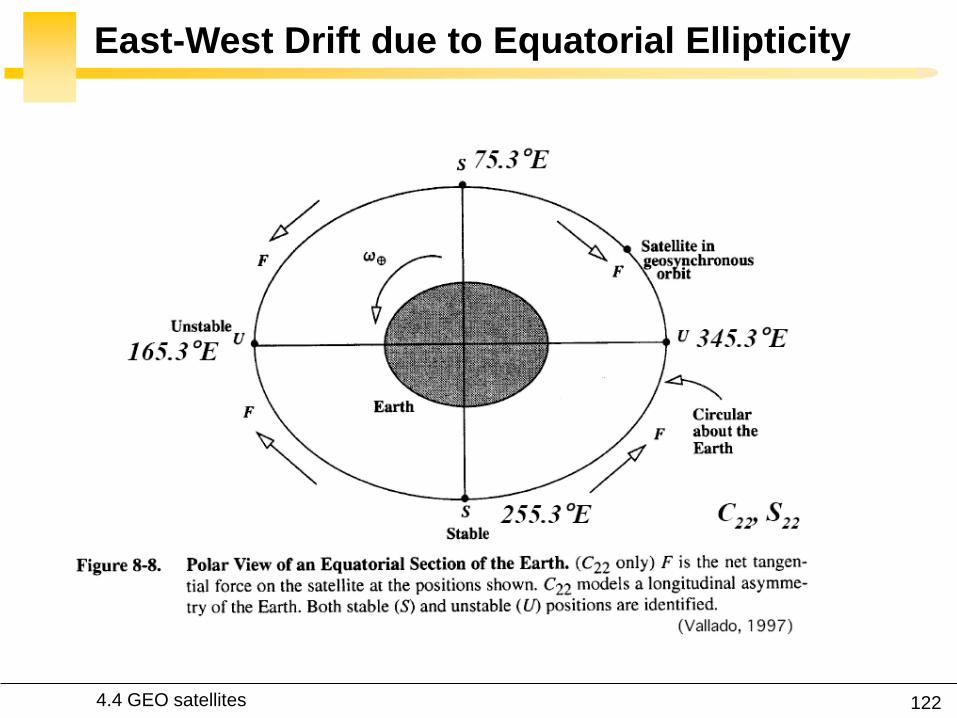
East-West Drift due to Equatorial Ellipticity
4.4 GEO satellites
122
East-West Drift due to Equatorial Ellipticity
4.4 GEO satellites

123
East-West Drift: HPOP (2,0) vs. HPOP (2,2)
4.4 GEO satellites
124
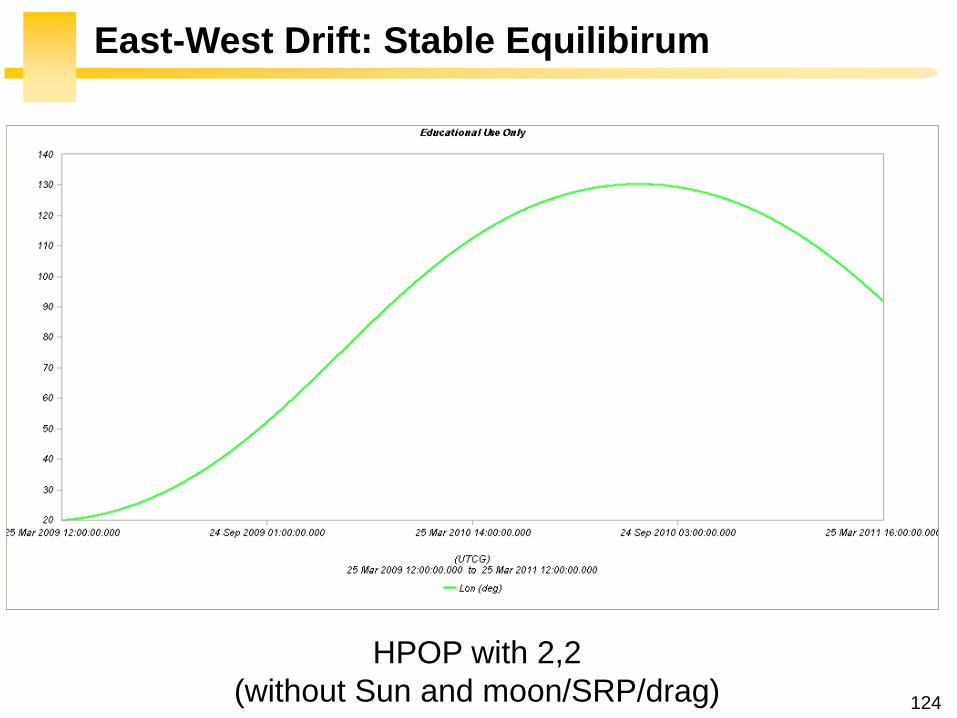
East-West Drift: Stable Equilibirum
HPOP with 2,2
(without Sun and moon/SRP/drag)

125
East-West Drift: Stable Equilibirum
HPOP with 2,2
(without Sun and moon/SRP/drag)

126
East-West Drift: Stable Equilibirum
HPOP with 2,2
(without Sun and moon/SRP/drag)

127
North-South Drift
The perturbations caused by the Sun and the Moon are
predominantly out-of-plane effects causing a change in
the inclination and in the right ascension of the orbit
ascending node.
Similar effects on the orbit to those of the Earth’s
oblateness (but here with respect to the ecliptic)
A GEO satellite therefore drifts in latitude with a
fundamental period equal to the orbit period.

128
North-South Drift
Period ?
HPOP with Sun and Moon
(without oblateness/SRP/drag)

129
North-South Drift
Period ?
HPOP with Sun and Moon
(without oblateness/SRP/drag)

130
Thrust Forces for Stationkeeping
GEO spacecraft require continual stationkeeping to stay
within the authorized box using onboard thrusters.
4.4 GEO satellites
131
4.2 ANALYTIC TREATMENT
4.2.1 Variation of parameters
4.2.2 Non-spherical Earth
4.2.3 J2 propagator in STK
4.2.4 Atmospheric drag
4.2.5 Third-body perturbations
4.2.6 SGP4 propagator in STK
4.2.7 Solar radiation pressure
4. Non-Keplerian Motion
4.3 NUMERICAL METHODS
4.3.1 Orbit prediction
4.3.2 Numerical integration
4.3.3 Single-step methods: Runge-Kutta
4.3.4 Multi-step methods
4.3.5 Integrator and step size selection
4.3.6 ISS example
4.4 GEOSTATIONARY SATELLITES
132
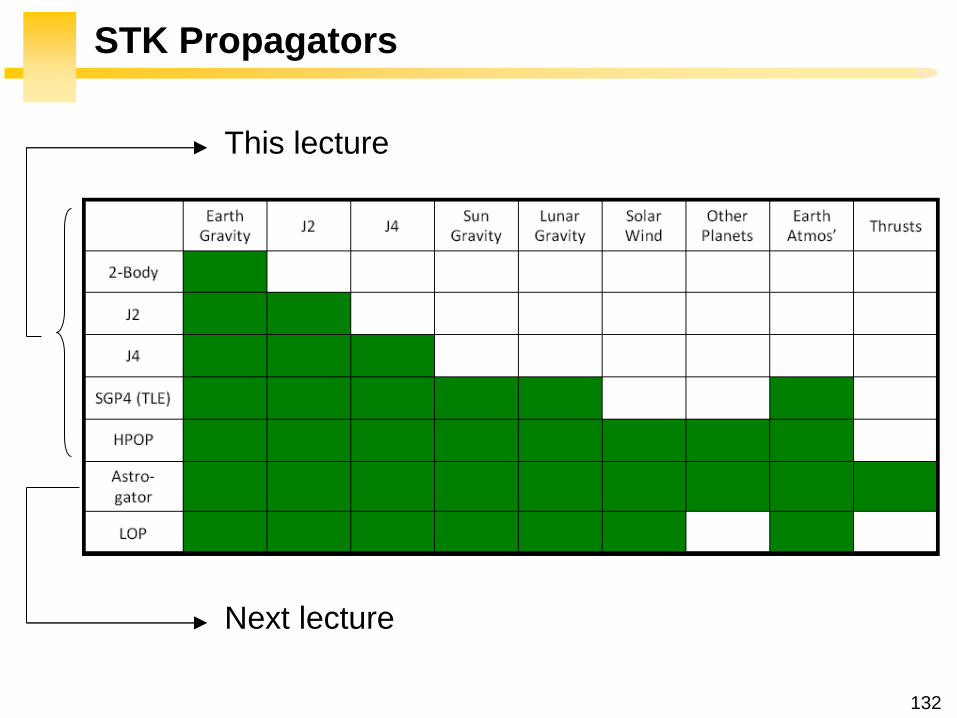
STK Propagators
Next lecture
This lecture
Gaëtan Kerschen
Space Structures &
Systems Lab (S3L)
4B. Non-Keplerian Motion
Astrodynamics (AERO0024)


















