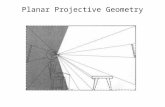
1. Projective geometry
26
1. Projective geometry • Homogeneous representation of points and lines in 2D space • 2D projective space • Points at infinity and the line at infinity • Conics and dual conics • Projective transformation • Hierarchy of 2D projective transformation
Transcript of 1. Projective geometry

1. Projective geometry• Homogeneous representation of points and lines in 2D space• 2D projective space• Points at infinity and the line at infinity• Conics and dual conics• Projective transformation• Hierarchy of 2D projective transformation

Notation• Scalars:
• Vectors:
• Transpose:
• Matrices:
• Transpose:
x, y, . . .
x,y, . . .
A, B, P, . . .
A>, B>, P>, . . .
x
>,y>, . . .

Homogeneous representation of lines in 2D space• A line on a xy plane:• Any line can be represented by a 3-vector
• The same line is given by
• In this sense, is equivalent to
• Such vectors are called homogeneous vectors• This equivalence will be represented by
• Two vectors on both sides are parallel
ax+ by + c = 0
l = [a, b, c]>
k(a, b, c)> = (ka, kb, kc)>
(a, b, c)> k(a, b, c)>
/
(a, b, c)> / k(a, b, c)>
kax+ kby + kc = k(ax+ by + c) = 0

Homogeneous representation of points in 2D space• A point is on a line
• Homogeneous representation of a point:• The same point is given by:
• To recover the original (inhomogeneous) coordinates from homogeneous coordinates, simply do
(x, y) l = (a, b, c)>
, l
>x =
⇥a b c
⇤2
4x
y
1
3
5 = ax+ by + c = 0
x = (x, y, 1)>
k(x, y, 1)> = (kx, ky, k)>
(x, y, 1)> / k(x, y, 1)>
x = (x1, x2, x3)>
✓x1
x3,
x2
x3
◆

2D projective space• Sets of equivalent vectors in this sense form a special space
called the projective space
𝐱
𝐱′
𝐱′′𝐱
𝐱′
𝐱′′
3D Euclidean space 2D projective space

Intersection of lines• Q) What is the crossing point of lines?
• A) It is given by their cross product:
• Proof:
• E.g. Crossing point of and ?
l =
2
4abc
3
5 l0 =
2
4a0
b0
c0
3
5
x ⌘ l⇥ l
0
l
>x = l
>(l⇥ l
0) = 0(Scalar triple product)
l
l0
l⇥ l0
x = 1 y = 1
l = [�1, 0, 1]> l0 = [0,�1, 1]>
x = l⇥ l
0 =
2
4�101
3
5⇥
2
40�11
3
5 =
2
4111
3
5
(1/1, 1/1) = (1, 1)𝑥
𝑦
(1,1)
𝑥 = 1
𝑦 = 1

Points at infinity• Consider the intersection of and
• Conversion to inhomogeneous coordinates…
• A point with homogeneous coordinates is called “a point at infinity”
• A point gives a finite point if and gives a point at infinity if
l = (a, b, c)> l0 = (a, b, c0)>
l⇥ l0 = (bc0 � bc, ca� ac0, ab� ab)> = (c0 � c)(b,�a, 0)>
(b/0,�a/0) = (1,1)
(x, y, 0)>
(x1, x2, x3)>
x3 6= 0x3 = 0

Points at infinity• In inhomogeneous domain, parallel lines do not have an
intersection• In homogenous domain, parallel lines have an intersection at a
point at infinity • Points at infinity and finite points can be treated equally ß an
advantage of using homogeneous representation• Note that there are an infinite number of ʻpoints at infinityʼ
(a, b, 0)>
𝑥
𝑦

The line at infinity• The special line is called “the line at infinity”
• The name comes from the fact that every point at infinity will lie on this line
• This line is unique, and will be denoted by
l = (0, 0, 1)>
⇥0 0 1
⇤2
4x1
x2
0
3
5 = 0
l1 = (0, 0, 1)>

Duality of points and lines• There is symmetry between points and lines
• Exchange of points and lines in a proposition wonʼt change its correctness
• E.g. Intersection of lines is given by
• Prove this directly without using the duality (1st assignment)
l
>x = x
>l = 0
A line passing through two points is given by
x = l⇥ l
0
l = x⇥ x
0
,

Conics• A conic = a curve obtained as the intersection of a cone with a
plane
Ellipse Hyperbola Parabola
Any conic on a xy plane is given by
ax
2 + bxy + cy
2 + dx+ ey + f = 0
x x1/x3 and y x2/x3
ax
21 + bx1x2 + cx
22 + dx1x3 + ex2x3 + fx
23 = 0

Conics• Or, can also be written as
• Any 3×3 symmetric matrix represents a conic• Matrices scaled by constants give the same conic
• Specifying five points determines a conic (passing these points)
x
>Cx = 0
C =
2
4a b/2 d/2b/2 c e/2d/2 e/2 f
3
5

Proof: lies on , since
Tangents to a conic• The line tangent to a conic at a point is given by l xC
l = Cx
x
x
>l = x
>Cx = 0
Assume that there exists another point lying on and .
Cl
y
Then, for any , it should hold that ↵
(x+ ↵y)>C(x+ ↵y) = 0
This means that any point should lie on . x+ ↵y C
This is possible only if is a line or there exists no such point .C y
𝐲
𝐱𝐥
l

Dual conics• A conic gives a set of points. A dual conic is another type
of conics, which gives a set of lines• Also known as line conics
• Consider , where • This gives a set of tangent lines to conic ---- (*)
l>C⇤l = 0
C⇤C
C⇤ ⌘ C�1
x
>Cx = 0
l>C⇤l = 0
C
Show the above (*) is true (2nd assignment).

2D projective transformation• Projective transformation (different names: projectivity,
homography, colineation)• Definition: An invertible mapping from/to 2D projective spaces that
satisfies that if three points lie on a line, then the mapped points lie on a line.
• Intuitively, any mapping from a plane to a plane that maps a line to a line
• Such a transformation ( ) is given by the following equation:
x
0 /
2
4h11 h12 h13
h21 h22 h23
h31 h32 h33
3
5x
x
0 / Hx or
x ! x
0

An example: central projection• Central projection: a point on a plane is mapped onto a point on
another plane as shown below
• Obviously, central projection maps a line to a line, and thus it is a 2d projective transformation
ππ’
xx’

Calculating a projective transformation• If you want to represent the points before/after the mapping in
inhomogeneous coordinates…
x
0 /
2
4h11 h12 h13
h21 h22 h23
h31 h32 h33
3
5x
2
4x
0
y
0
1
3
5 /
2
4h11 h12 h13
h21 h22 h23
h31 h32 h33
3
5
2
4x
y
1
3
5 =
2
4h11x+ h12y + h13
h21x+ h22y + h23
h31x+ h32y + h33
3
5
x
0 =h11x+ h12y + h13
h31x+ h32y + h33
y
0 =h21x+ h22y + h23
h31x+ h32y + h33

Transformation of lines and conics• A 2D projective transformation mapping a point as
• maps a line as
• proof:
• and maps a conic as
• proof:
x
0 / Hx
l0 / H�>l
C0 / H�>CH�1
x
0>l
0 = (x>H>)l0 = (x>H>)(H�>l) = x
>l = 0
x
0>C0x0 = x
>H>C0Hx = x
>H>H�>CH�1Hx = x
>Cx = 0

Transformation of lines and conics
ππ’
ll’
ππ’
C
C’

Hierarchy of 2D projective transformation• Projective transformation can be classified into the following
four types in the order of increasing degrees of freedom:
1. Euclidean transformation / Isometry2. Similarity transformation3. Affine transformation4. Projective transformation (full-projective ---)
x
0 /
2
4h11 h12 h13
h21 h22 h23
h31 h32 h33
3
5x

Euclidean transformation• 2D projective transformations given as follows:
• Called Euclidean trans. if ε=1; isometry if ε=-1 or 1.• Combination of 2D rotation and translation• Length and area are preserved (invariant)
x
0 /
2
4" cos ✓ � sin ✓ t
x
" sin ✓ cos ✓ ty
0 0 1
3
5x

Similarity transformation• 2D projective transformations given as follows:
• Combination of 2D rotation, translation, and scaling• Shape and angle are preserved (invariant)
x
0 /
2
4s cos ✓ �s sin ✓ t
x
s sin ✓ s cos ✓ ty
0 0 1
3
5x

Affine transformation• 2D projective transformations given as follows:
• Parallelism is preserved• Points at infinity are mapped to points at infinity
x
0 /
2
4a11 a12 t
x
a21 a22 ty
0 0 1
3
5x
x
0 /
2
4a11 a12 t
x
a21 a22 t
y
0 0 1
3
5
2
4x1
x2
0
3
5 =
2
4a11x1 + a12x2
a21x1 + a22x2
0
3
5
x
0 /
2
4a11 a12 t
x
a21 a22 t
y
0 0 1
3
5
2
4x1
x2
0
3
5 =
2
4a11x1 + a12x2
a21x1 + a22x2
0
3
5

Projective transformation• The most general one:
• Colinearity and cross-ratio are preserved• Points at infinity can be mapped to finite points
x
0 /
2
4h11 h12 h13
h21 h22 h23
h31 h32 h33
3
5x
x
0 /
2
4h11 h12 h13
h21 h22 h23
h31 h32 h33
3
5
2
4x1
x2
0
3
5 =
2
4h11x1 h12x2
h21x1 h22x2
h31x1 h32x2
3
5
x
0 /
2
4h11 h12 h13
h21 h22 h23
h31 h32 h33
3
5
2
4x1
x2
0
3
5 =
2
4h11x1 h12x2
h21x1 h22x2
h31x1 h32x2
3
5+
+
+

Transformations and images• Images of a plane created by different transformations
[Hartle
y-Zisserman03
]
similarity affine projective

Image rectification• Given a projective transform of a plane, we want to find a
transformation that maps it onto a similarity transform of the same plane
• Any projective trans. is determined by four point pairs
⇒
[Hartle
y-Zisserman03
]
x1x2
x3 x4 x
04x
03
x
02 x
01