1 Adept Cobra PLC Robots – Application Tips November 10, 2003.
12
1 Adept Cobra PLC Robots – Application Tips November 10, 2003
-
Upload
annabella-scholes -
Category
Documents
-
view
217 -
download
1
Transcript of 1 Adept Cobra PLC Robots – Application Tips November 10, 2003.

1
Adept Cobra PLC Robots – Application Tips
November 10, 2003

2
Optimization Techniques
Things to consider that impact performance
• Mounting• Cell Layout • Part Handling• Programming Considerations

3
Mounting
Mounting Surface• Mount on smooth, flat surface • Mounting structure must be rigid• Vibration and Flexing will affect
performance• Recommend minimum 25mm (1 inch)
steel plate with rigid tube frame

4
When positioning a robot in the workcell, take advantage of moving multiple joints for faster motions
The “Z” and “theta” axes are the slowest, so set up conveyor heights and pick/place positions to minimize Z axis motion
Cell Layout

5
• Moving multiple joints combines the joint speeds for faster motions
Cell Layout
In this example, same point-to-point distance will result in
different cycle time
• Single joint motion limits robot speed to individual joint speed
Note: animations above illustrate robot motions, but do not demonstrate robot
speed.

6
o The “Z” and “theta” axes are the slowest, so set up conveyor heights and pick/place positions to minimize Z axis motion.
o In general, the shorter the move, the faster the cycle.
Cell Layout
Minimizing Z height changes in a cycle will minimize cycle time

7
Part Handling
Part Handling• In order to minimize settling delays, try
to center the payload mass on Z-axis center line.
• Minimize mass of gripper and gripper tooling as much as possible. • Consider aluminum versus steel if
appropriate• Remove material that is not needed
on tooling • Minimize payload
• Stay within rated payload – the lighter the payload, the better the performance
• Robot will run with max payload, but not at peak performance
8
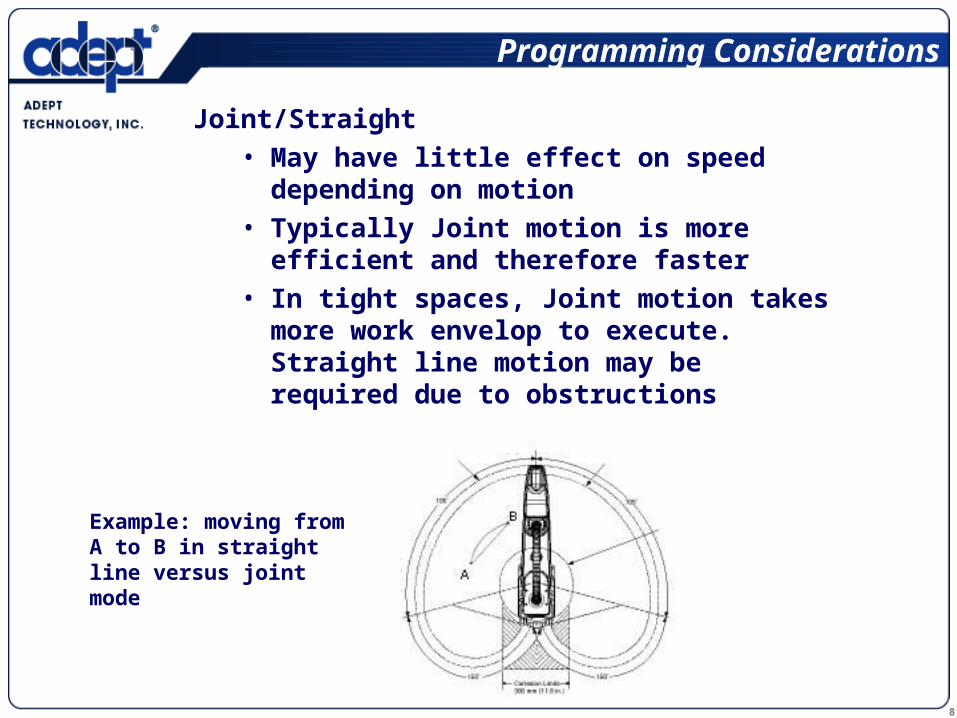
Programming Considerations
Joint/Straight• May have little effect on speed
depending on motion• Typically Joint motion is more
efficient and therefore faster• In tight spaces, Joint motion takes
more work envelop to execute. Straight line motion may be required due to obstructions
Example: moving from A to B in straight line versus joint mode

9
Programming Considerations
Finish/No Finish• Depending on the motion (and
assuming no nulling tolerance required), “No Finish” will cause motion to one point to blend with motion to the following point
Multiple/Single• “Single” limits rotation of the robot
wrist (Joint 4) to ±180°• “Multiple” allows full rotations of
the wrist• Minimizing Joint 4 rotation will
shorten motion time

10
Programming Considerations
Coarse/Fine• Defines how accurately robot
achieves commanded position • “Coarse” is a looser tolerance (less
accuracy) and results in faster cycles• “Fine” is a tighter tolerance
(increased accuracy) and takes more time to achieve
Commanded position
Fine nulling tolerance
Coarse nulling tolerance

11
Programming Considerations
Lefty/Righty • Change in arm configuration from
Lefty to Righty or Righty to Lefty requires more time than maintaining the current configuration during a move.
12
Adept Cobra PLC Robots – Application Tips
November 10, 2003