[ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image...
8
Cell Recognition by Image Processing and Nonlinear Cross Correlation E. P´ erez-Careta a , M. Torres-Cisneros a , J.J. Sanchez-Mondrag´ on b , O. V´ azquez Buenos Aires c , O. G. Ibarra Manzano a , L. A. Aguilera-Cort´ es a a Nanobiophotonics Group, DICIS, Salamanca, Guanajuato, M´ exico; b INAOE/Photonics and Physical Optics Lab., Puebla, M´ exico c Universidad del Papaloapan, Loma Bonita, Oaxaca, M´ exico ABSTRACT This work implements a novel hybrid method for detection and tracking of biological cells of ”in vitro” samples (Goobic, 1 2005). The method is able to detect and track cells based on image processing, nonlinear filters and normalized cross correlation (ncc) and it is tested on a full sequence of 1080 images of cell cultures. In addition of the cell speed, Cell tracking differentiate itself from tracking other kinds of tracking because cells show: mitosis, apthosis, overlapping and migration (Liao, 2 1995). Image processing provides an excellent tool to improve cell recognition and background elimination, set as a priori task on this work and conveniently implemented by a Fourier analysis. The normal cross correlation was developed in the Fourier space to reduce time processing. The problem of the target detection was formulated as a nonlinear joint detection/estimation problem on the position parameters. A bank of spatially and temporally localized nonlinear filters is used to estimate the a posteriori likelihood of the existence of the target in a given space-time resolution cell. The shapes of the targets are random and according to the sequence, the targets change of shape almost every frame. However, the cross correlation result is based on the target shape matching, not in the position; and the system is invariant to rotation. Nonlinear filter makes a robust cell tracking method by producing a sharper correlation peak and reducing the false positives in the correlation. These false positives may also be reduced by using image preprocessing. Fourier and nonlinear filtering implementation showed the best results for the proposed cell tracking method presenting the best time consumption and the best cell localization. Keywords: Nonlinear filters, image processing, cell tracking, ncc 1. INTRODUCTION There are several tracking techniques, most of them include object recognition and object segmentation before the cell tracking (Zimmer, 3 2002). After the cell recognition the best tracking method is the nonlinear cross correlation (ncc). Image acquisition is transcendental in this work so the next section begins describing the acquisition method. Images were acquired in JPEG format and are 500 × 700 pixels size. These images have a compression rate of 3:1. The JPEG format unfortunately has poor resolution, so all of them were converted to a 24 bits BMP format image. The images were acquired at the Laboratory of Image Synthesis and Analysis(LISA), under the following conditions (Debeir, 4 2005): • Pixel resolution of 0.92μM • PC-BRAB-GI card of 32 bits • CCD Hitachi Denshi KP-MIE/K-S10 camera Further author information: Eduardo P´ erez-Careta E-mail: [email protected] Telephone: +52 044 464 108 001 6 Miguel Torres-Cisneros: E-mail: [email protected], Telephone: +52 (0)1 464 64 7 99 40 Photonics North 2009, edited by Réal Vallée, Proc. of SPIE Vol. 7386, 73860F © 2009 SPIE · CCC code: 0277-786X/09/$18 · doi: 10.1117/12.839858 Proc. of SPIE Vol. 7386 73860F-1 Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms
Transcript of [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image...
![Page 1: [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image processing and nonlinear cross correlation](https://reader042.fdocuments.us/reader042/viewer/2022020600/57506c1b1a28ab0f07c1237f/html5/page/1.jpg)
Cell Recognition by Image Processing and Nonlinear CrossCorrelation
E. Perez-Caretaa, M. Torres-Cisnerosa, J.J. Sanchez-Mondragonb, O. Vazquez Buenos Airesc,O. G. Ibarra Manzanoa, L. A. Aguilera-Cortesa
aNanobiophotonics Group, DICIS, Salamanca, Guanajuato, Mexico;bINAOE/Photonics and Physical Optics Lab., Puebla, MexicocUniversidad del Papaloapan, Loma Bonita, Oaxaca, Mexico
ABSTRACT
This work implements a novel hybrid method for detection and tracking of biological cells of ”in vitro” samples(Goobic,1 2005). The method is able to detect and track cells based on image processing, nonlinear filters andnormalized cross correlation (ncc) and it is tested on a full sequence of 1080 images of cell cultures. In addition ofthe cell speed, Cell tracking differentiate itself from tracking other kinds of tracking because cells show: mitosis,apthosis, overlapping and migration (Liao,2 1995). Image processing provides an excellent tool to improve cellrecognition and background elimination, set as a priori task on this work and conveniently implemented by aFourier analysis. The normal cross correlation was developed in the Fourier space to reduce time processing. Theproblem of the target detection was formulated as a nonlinear joint detection/estimation problem on the positionparameters. A bank of spatially and temporally localized nonlinear filters is used to estimate the a posteriorilikelihood of the existence of the target in a given space-time resolution cell. The shapes of the targets are randomand according to the sequence, the targets change of shape almost every frame. However, the cross correlationresult is based on the target shape matching, not in the position; and the system is invariant to rotation.Nonlinear filter makes a robust cell tracking method by producing a sharper correlation peak and reducing thefalse positives in the correlation. These false positives may also be reduced by using image preprocessing. Fourierand nonlinear filtering implementation showed the best results for the proposed cell tracking method presentingthe best time consumption and the best cell localization.
Keywords: Nonlinear filters, image processing, cell tracking, ncc
1. INTRODUCTION
There are several tracking techniques, most of them include object recognition and object segmentation beforethe cell tracking (Zimmer,3 2002). After the cell recognition the best tracking method is the nonlinear crosscorrelation (ncc). Image acquisition is transcendental in this work so the next section begins describing theacquisition method.
Images were acquired in JPEG format and are 500× 700 pixels size. These images have a compression rateof 3:1. The JPEG format unfortunately has poor resolution, so all of them were converted to a 24 bits BMPformat image.
The images were acquired at the Laboratory of Image Synthesis and Analysis(LISA), under the followingconditions (Debeir,4 2005):
• Pixel resolution of 0.92μM
• PC-BRAB-GI card of 32 bits
• CCD Hitachi Denshi KP-MIE/K-S10 camera
Further author information: Eduardo Perez-CaretaE-mail: [email protected] Telephone: +52 044 464 108 001 6Miguel Torres-Cisneros: E-mail: [email protected], Telephone: +52 (0)1 464 64 7 99 40
Photonics North 2009, edited by Réal Vallée, Proc. of SPIE Vol. 7386, 73860F© 2009 SPIE · CCC code: 0277-786X/09/$18 · doi: 10.1117/12.839858
Proc. of SPIE Vol. 7386 73860F-1
Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms
![Page 2: [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image processing and nonlinear cross correlation](https://reader042.fdocuments.us/reader042/viewer/2022020600/57506c1b1a28ab0f07c1237f/html5/page/2.jpg)
• Olympus IX50 10:1 microscopy
• Cellular cultures in Falcon plates at 37◦
The image preprocessing techniques applied consist in
• Image Normalization
• Image Equalization
• Image Segmentation
• Image Dilation
• Image Erosion
All processing were developed in a HP pavilion dv6220la Notebook pc with AMD Turion 64 X2 processortechnology TL-50 1.61GHz and 992 MB of RAM memory.
1.1 SegmentationIn 1978, Xu5 introduced the concept of segmentation in image processing. He defined segmentation as theclassification of the pixels according to some features in the image. In his work, he tried to classify pixels basedon the border information. To complement the definition made by Panda, Image segmentation also can be thepartitioning of pixels into different homogeneous groups, where all the pixels in the same region have the sameintensity value. The homogeneous groups are characterized by a number of features gathered from the image.
A year later, Kuroyanagi6 classified homogeneous regions (introduced in the last paragraph) based on amathematical-pattern recognition model. His technique did not require training prototypes but operated inan “unsupervised” mode. The basic procedure is a K-means∗ clustering algorithm which converges to a localminimum in the average squared distance for a specified number of clusters. K-means algorithm has been widelyused since then for different applications.
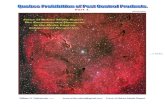
2. NORMALIZED CROSS CORRELATIONThe result of this algorithm is a maximum peak in the same position of the best match of both signals, in thiscase the scene and the target, Fig. 1 shows this result. The maximum correlation of the target and the scene areshown in Fig. 1 by a white dote in the maximum intensity. From the image also it is possible to infer that severaltargets in the scene can be confused with the original target, those “fake” targets are called false positives.
For the 2D correlation, in our case, we define the functions as a matrix array, instead of a vector like in 1DCross Correlation. For a continuous case, we define the correlation of two functions f(x, y) and g(x, y) as
f(x, y) ◦ g(x, y) =∫ ∞
−∞
∫ ∞
−∞f∗(α, β)g(x + α, β + y)dαdβ (1)
for the discrete case, as in 1D case, are required extended functions. In this case, let be f(x, y) and g(x, y)two functions of size A×B and C ×D respectively, the extended functions fe(x, y) and ge(x, y) with period ofM = A+ C − 1 and N = B +D − 1, giving as result the correlation in 2D as shown in Eq. 2.
fe(x, y) ◦ ge(x, y) =M−1∑m=0
N−1∑m=0
f∗e (m, n)ge(x +m, y + n) (2)
for x = 0, 1, 2, 3, 4, ..., M − 1 and y = 0, 1, 2, 3, 4, ..., N − 1.
Now, it is important to remember that the function ge(x, y) is the target and fe(x, y) is the scene∗It is an algorithm to cluster n objects based on attributes into k partitions, k < n (Ray,7 2002). It assumes that
the object attributes form a vector space (Ray,? 2000). The objective it tries to achieve is to minimize total intra-clustervariance, or, the squared error function (Liao,2 2002).
Proc. of SPIE Vol. 7386 73860F-2
Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms
![Page 3: [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image processing and nonlinear cross correlation](https://reader042.fdocuments.us/reader042/viewer/2022020600/57506c1b1a28ab0f07c1237f/html5/page/3.jpg)
IMAGEPROCESSING
IMAGEPROCESSING
IMAGEPROCESSING
FFT FFT
Figure 1.
This image shows the complete method using frequency domain and the result of it including the detection offalse positives and the best correlation match.
3. NONLINEAR FILTERS
In the literature there are many methods to evaluate the filter performance of correlation between two signals,to evaluate that in our experiment, the criteria that Javidi used in his work of 20028 was taken as reference forthe calculation of the peak to correlation energy (PCE) in Eq. 8.
PCE =‖ c(0, 0) ‖2∫ ∫ ‖ c(x, y) ‖2 dydx
(3)
This parameters measures the ratio between the intensity of the peak of the correlation and the localizationof the energy of the output plane. Every time that correlation between the target and the scene is performed,we will obtain as result a sharp and a high peak. PCE values above the threshold will indicate that there is asimilar object in the scene, and values below the PCE indicates no clear recognition of the object.
The output of the nonlinear filter is given by Eq. 4
Hυ[R(α, β), S(α, β) =ευ
2Π
∫G(ω)exp[R2(α, β) + S2(α, β)]]Jυ [2ωR(α, β)2S(α, β)]dω (4)
where Jυ is the Bessel function of first kind, order υ. When υ = 1 the phase is preserved and only theamplitude is affected. The Fourier transform of the kth law is given by Eq. 5
Gω =2
(iω)k+1Γ(k + 1); k ≤ 1 (5)
where Γ(∗) is the gamma function and k is the severity of nonlinearity. k = 1 corresponds to a linear deviceand k = 0 corresponds to a hard clipping nonlinearity.
Linear filtering techniques have serious limitations dealing with signals that have been created or processedby a system exhibiting some degree of nonlinearity; in general, situations where the relevance of informationcannot be specific in frequency domain. In image processing, many of these characteristics are often present,and it is no wonder that image processing is the field where nonlinear filtering techniques have first shown clearsuperiority over linear filters (Peltonen,9 2001).
Proc. of SPIE Vol. 7386 73860F-3
Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms
![Page 4: [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image processing and nonlinear cross correlation](https://reader042.fdocuments.us/reader042/viewer/2022020600/57506c1b1a28ab0f07c1237f/html5/page/4.jpg)
The blurring caused by the linear filtering is processed by using nonlinear filter techniques as the medianfilter. Using linear filtering a substantial part of this information comes from edges because of a blurring effect.So after all analysis we are able to say that median filters effectively reduce spike-like noise, while smoothingfilters effectively reduce high space-frequency noise (Itagaki?).
It is easier to improve a nonlinear filtering than a linear one. Using a nonlinear filter with an specific constrainwe may obtain the effect without causing any noise disturbance (Liptser,? 1995).
Nonlinear filtering produces a finite and tolerant method to rotation and size. Nonlinear filters discriminateinformation, reduce noise and peak sharpness.
There is a law that applies a nonlinear operator in a symmetric way. It is the k’th law, where k is the parameterthat controls the nonlinearity of the filter. There are some values that defines the filter in the parameter k, thoseare when k=0 that are the binarizing nonlinearities and k=1 that defines linear filter techniques, so, to reachnonlinearity systems, the range of k should oscillate between the following values: 0 < k < 1. This thesispresents the results and the analysis of the experimentation for those values of the k parameter. Depending onthe different problems of the image (illumination, noise, scale, rotation) the k parameter is adjustable.
Nonlinear filtering depends on the nonlinearity constrain value (k), but it is difficult to find an optimalconstrain value for the image to be filtered. Depending on the value of the constrain, the effect of nonlinearitychanges.
A particular contribution that describes better the k’th law and that was the base of the nonlinear imple-mentation of this work was proposed by Javidi10 in 1989. His work proposed several correlations to obtain signrecognition using nonlinear filtering. His processor performed several correlations between the image and severaltargets that matches at least one feature of the image. He used a bank of single filters to achieve the compositefilter.
3.1 Nonlinear Cross-Correlation
Correlation gives a better performance in the Fourier frequency domain, where s(x, y) and r(x, y) are the Fouriertransforms of s(x, y) and r(x, y) respectively. The complete Fourier transform is defined by Eq. 6.
s(u, v) = TF{s(x, y)} =∫ ∞
−∞
∫ ∞
−∞s(ξ, η)exp[−i2π(μξ + νη)]dξdη (6)
The inverse function is expressed by Eq. 7
c(x, y) = TF−1{s(u, v)r ∗ (u, v)} (7)
where TF−1 is the inverse Fourier transform. Eq. 7 shows that the correlation is obtained by a multiplicationof each pixel in each image. The system perform or develop a correlation are called correlators, these systemsoptically implement in a real time application Eq. 7.
In the literature there are many methods to evaluate the filter performance of correlation between two signals,to evaluate that in our experiment, we used the same criteria that in,8 the peak to correlation energy (PCE) 8.
PCE =‖ c(0, 0) ‖2∫ ∫ ‖ c(x, y) ‖2 dydx
(8)
This parameters measures the ratio between the intensity of the peak of the correlation and the localizationof the energy of the output plane. Every time that correlation between the target and the scene is performed,we will obtain as result a sharp and a high peak. This way, we always get a high value of PCE. PCE valuesabove the threshold will indicate that there is a similar object in the scene, and values below the PCE indicatesno clear recognition of the object.
The best way to implement a robust system with the less loses possible depends on the design of the filter,if the system has a variety of filters for each problem, the system is able to filter all the images.
Proc. of SPIE Vol. 7386 73860F-4
Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms
![Page 5: [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image processing and nonlinear cross correlation](https://reader042.fdocuments.us/reader042/viewer/2022020600/57506c1b1a28ab0f07c1237f/html5/page/5.jpg)
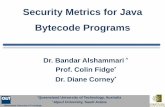
FRAME EQUALIZATION EROSION DILATION FILTERING NCC1 0.345 s 0.024 s 0.025 s 0.1s 0.3s
100 32.03 s 2.3 s 2.4 s 20s 25.2 s
200 73.43 s 5.03 s 5.13 s 66.4 s 70.35 s
300 110.33 s 7.21 s 7.31 s 94.34 s 106.34 s
400 145.35s 9.53 s 9.23 s 123.23 s 150.23 s
500 182.36 s 12.33 s 12.53 s 167.34 s 183.98 s
600 215.65 s 15.03 s 16.63 s 197.45 s 205.43 s
700 253.23 s 18.00 s 19.30 s 239.23 s 269.34 s
800 284.32 s 20.4 s 21.3 s 270.56 s 295.76 s
900 311.35 s 22.56 s 23.46 s 314.325 s 356.54 s
1000 345.36 s 25.34 s 25.54 s 344.34 s 400.34 s
1080 374.38 s 27.34 s 29.04 s 388.67 s 453.43 s
Figure 2. This table shows the time analysis of the complete algorithm developed in different steps, including ncc resultsfor the 1080 images. Ncc took the longest time for each single frame.
The composite filter used on this approach is made of several positions and size of the target, the correlationof this operation with the scene is time consuming so it is recommendable to minimize the usage of several imagesto the filter.
4. RESULTS
Results of the time analysis and improvements to reduce computational cost are explained in this section. Alsoan analysis and comparison of the normalized cross correlation (ncc), implemented in spatial and frequencydomain, is presented.The following figures describes several results of the nonlinear filters using the kth law.
4.1 Image Processing
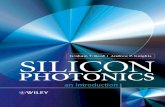
Image equalization takes a little longer because it completes the accumulative histogram of the image. Theimage equalization of each frame takes between 0.001-0.005s depending on the frequency of change that existsin the image. The change in the frequency of the image, depends directly on the quantity of cells that existsin the image. If there many cells then the change in frequency is big. In Fig.3 the complete time of processingincluding image normalization and equalization is shown. The complete time of processing was of 3.954s. Thegraphic of the figure shows a linear behaviour but some times it change when the cell reduces its size and reducesprocessing time. Around frame 900 the target reduces its size and the function presents a discontinuity in theaverage time of processing, it happens when mitoses takes place.
An operation that helps to better define the contour of the image are the morphological operators. EvenMorphological gradient operator are area operators, this image processing takes a short time. Image Dilationwas applied to detect cell borders (5 pixels). Using the intensity of the Halo and detected borders, an Erosionprocess was applied to eliminate “noise” generated by the image binarization. “Noise” in this case is any regionthat contains a cell mixed with background as shown in Fig. 4, where most of the region that contains the cellis well defined.
4.2 Localization Algorithm
This algorithms is based in the Euclidean distance algorithm, when the target is located in the area defined ascell, the cell position for the following frame is the same that the current one. If the position of the delta ofDirac is now located in the area corresponding to the Halo or a boundary, the target is also settle in the sameposition for the next frame; but if the delta of Dirac is in an area that does not belong to the cell or closer to it(5 pixels), the minimum distance to the closest pixel with maximum intensity is calculated. A pixels with themaximum intensity is a boundary or the Halo of that cell. After comparing the minimum distance we doublethat distance in the same direction, to settle the delta of Dirac in the region defined as cell, with this we securethat the delta of Dirac is going to be always in the cell or at least near it in a region considered as good to thetracking.
Proc. of SPIE Vol. 7386 73860F-5
Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms
![Page 6: [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image processing and nonlinear cross correlation](https://reader042.fdocuments.us/reader042/viewer/2022020600/57506c1b1a28ab0f07c1237f/html5/page/6.jpg)
Processing Time of Normalization and Equalization
ProcessingTime
Frame Number
Figure 3. Time Processing of Normalization and Equalization.
Figure 4. Image Binarization of a sigle frame, using 205 of threshold.
Proc. of SPIE Vol. 7386 73860F-6
Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms
![Page 7: [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image processing and nonlinear cross correlation](https://reader042.fdocuments.us/reader042/viewer/2022020600/57506c1b1a28ab0f07c1237f/html5/page/7.jpg)
EU
Figure 5. Image shows different frames with the tracking of all the cells. Results includes phenomena as mitosis, apthosis,overlapping and migration of cells for the complete sequence.
To face the mitosis problem, the properties of the cell were analyzed, during the mitosis, the cell reducesits size in a considerable amount and in most of the cases it reduces its shape to a semi-circle and all the areabecomes white. Therefore, using a circular window of radio equal to 15 pixels around the delta of Dirac, we areable to identify when a mitosis process is taking place. So when most of the area belonged to the circle is white,a new rectangle with the same features was created. Now in the same area we have two rectangles but we haveanother consideration, we move the rectangles 15 pixels above and 15 pixels below from the original position tomake sure that each one is going to follow different targets and not the same.
Fig. 5 represents the summary of the methods applied in this work for each single frame, including the analysisand solution for the different natural phenomena of the cell.
To detect the target in the scene, first we correlate both images (image and target). The result of thiscorrelation, in spatial domain, was performance in 5s, in frequency domain was done in 2.547s including thetransformations to the Fourier plane. When there is a 1 in the value of the cross correlation, it means thatthe target was detected correctly around 120 frames, then it began to get off the inspection window and thecorrelation was not perfect. After 200 frames in the correlation we obtained a result of zero, that means that nocells were detected in the window, then it varies around 0.0− 0.4.
5. CONCLUSIONS
Binarization is the faster method to discard the background and only consider the cell. Morphological gradientworks as the faster method to detect the borders by the calculation of the dilation and then a substractionbetween the original image and the dilated. Morphological gradient works as a filter for “garbag” or smallobjects presented in the blood stream.
Dilation of the image does not present good results by itself because it makes bigger the areas considered asbackground and makes more difficult the localization of the cell. Our experience showed that is not recommend-able to apply only one of the morphological gradient operators, we recommend to use at least both (erosion anddilation).
So without preprocessing the method is not well tested after 120 frames. Using normalization the algorithmtracks the cell for 170 frames.
The detection of the cell does not depends directly on the position of the Delta of Dirac obtained, it dependson the definition of the border of the cell and the Halo. Image processing in this work defines better the bordersof the cell (Morphological Gradient).
Proc. of SPIE Vol. 7386 73860F-7
Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms
![Page 8: [ Photonics North 2009 - Quebec, Canada (Sunday 24 May 2009)] - Cell recognition by image processing and nonlinear cross correlation](https://reader042.fdocuments.us/reader042/viewer/2022020600/57506c1b1a28ab0f07c1237f/html5/page/8.jpg)
After image processing, correlation in frequency domain showed a better time performance than the spatialone. Fourier transform also improves background elimination using frequency comparison. Fourier transformnot only provides information about the frequency of the objects, provides information about this distribution ofthe objects in it, useful information that complements the information acquired from the spatial domain. Usingboth domains, a robust method is developed.
Nonlinear filters provide a faster performance because nonlinear filters are smaller in size than linear filters,this reduces the processing time. The nonlinear filtering provides a finite detection method because most of thetime it centers the Delta of Dirac in the area defined as cell, the algorithm does not lose the cell.
Fourier and nonlinear filtering implementation showed the best results for the proposed cell tracking methodpresenting the best time consuming and best cell localization.
It is easier to improve a nonlinear filtering than a linear filter. Our results showed that using the kth law theperformance is different and better. k = 0.4 presented the best performance of the filter in the correlation andk = 0.1 improves the detection of the cell with a finer peak. Nonlinear filtering helps in the resolution of sometargets during the process.
The detection of the cell does not depends directly on the position of the Delta of Dirac obtained, it dependson the definition of the border of the cell and the Halo. Image processing in this work defines better the bordersof the cell (Morphological Gradient).
REFERENCES[1] Goobic, A. P., Tang, J., and Acton., S. T., “Image stabilization and registration for tracking cells in the
microvasculature.,” IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING. 52, 287 – 299 (February2005).
[2] Liao, G., Nagasaki, T., and Gundersen, G., “Low concentrations of nocodazole interfere with fibroblast loco-motion without significantly affecting microtubule level: Implications for the role of dynamic microtubulesin cell locomotion,” in [J. Cell Sci. ], 108, 3473 – 3483 (1995).
[3] Zimmer, C., Labruyere, E., Meas-Yedid, V., Guillen, N., and Olivo-Marin, J.-C., “Improving active contoursfor segmentation and tracking of motile cells in video microscopy,” Pattern Recognition, 2002. Proceedings.16th International Conference on 2, 286–289 vol.2 (2002).
[4] Debeir, O., Ham, P. V., Kiss, R., and Decaesteker, C., “Tracking or migrating cells under phase-contrastvideo microscopy combined mean-shift processes,” IEEE TRANSACTIONS ON MEDICAL IMAGING 24,697–711 (June 2005).
[5] Xu, C. and Prince, J. L., “Snakes, shapes, and gradient vector flow,” IEEE Transactions on image process-ing 7, 359–369 (MARCH 1998).
[6] Kuroyanagi, N., Guo, L., and Suehiro, N., “Proposal of a novel signal separation principle based on dftwith extended frame fourier analysis,” Global Telecommunications Conference, 1995. Conference record.Communication Theory Mini-Conference, GLOBECOM ’95., IEEE , 111–116 (13-17 Nov 1995).
[7] Ray, N. and Acton., S. T., “Motion gradient vector flow: An external force for tracking rolling leukocyteswith shape and size constrained active contours.,” IEEE TRANSACTIONS ON MEDICAL IMAGES. 23,1466 – 1478 (December 2004).
[8] Javidi, B., Castro, M.-A., Kishk, S., and Perez, E., “Automated detection and analysis of speed limit signs,”final, University of Connecticut, Storrs, CT 06269-5202 (February 2002).
[9] Peltonen, S., Gabbouj, M., and Astola, J., “Nonlinear filter design: methodologies and challenges,” Imageand Signal Processing and Analysis, 2001. ISPA 2001. Proceedings of the 2nd International Symposium on, 102–107 (2001).
[10] Bahram, J., “Nolinear joint power spectrum based optical correlation,” APLPIED OPTICS 28, 2358–2367(June 1989).
Proc. of SPIE Vol. 7386 73860F-8
Downloaded from SPIE Digital Library on 12 Jul 2012 to 152.3.102.242. Terms of Use: http://spiedl.org/terms