







Languages
Pages
Legal

Vibration of Single Degree
of Freedom SystemDhiman Basu
IIT Gandhinagar

AcknowledgementMost of the numerical data and plots
presented in this lecture are taken
from the Text Book
“Dynamics of Structures—Theory and
Application to Earthquake Engineering”
by Prof. Anil K. Chopra

Introduction
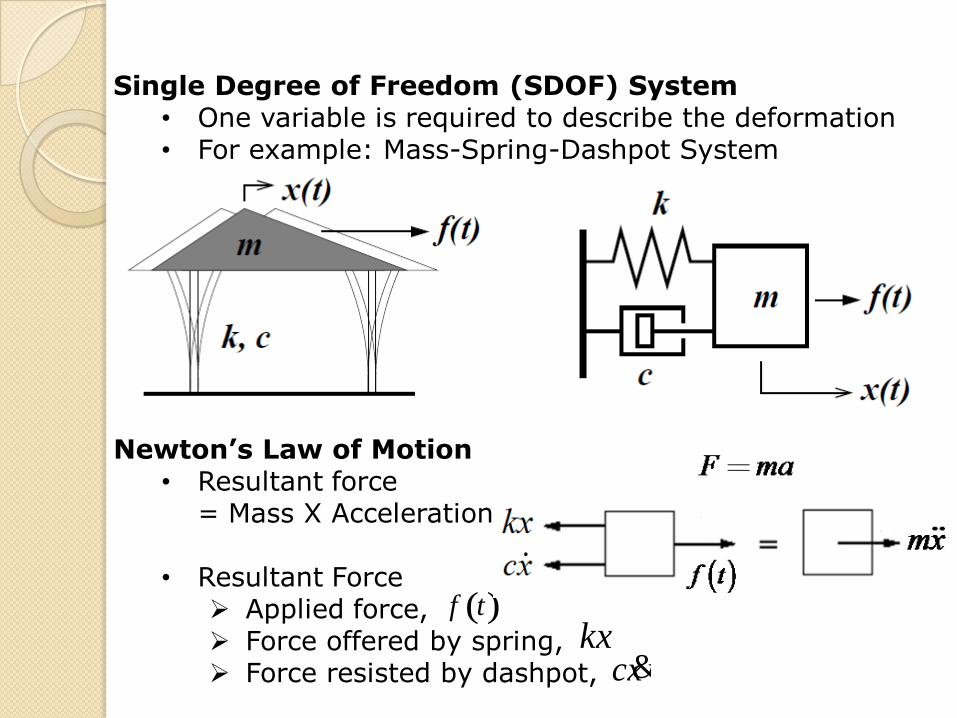
Single Degree of Freedom (SDOF) System• One variable is required to describe the deformation• For example: Mass-Spring-Dashpot System
Newton’s Law of Motion• Resultant force
= Mass X Acceleration
• Resultant Force Applied force, Force offered by spring, Force resisted by dashpot,
( )f tkx
cx&
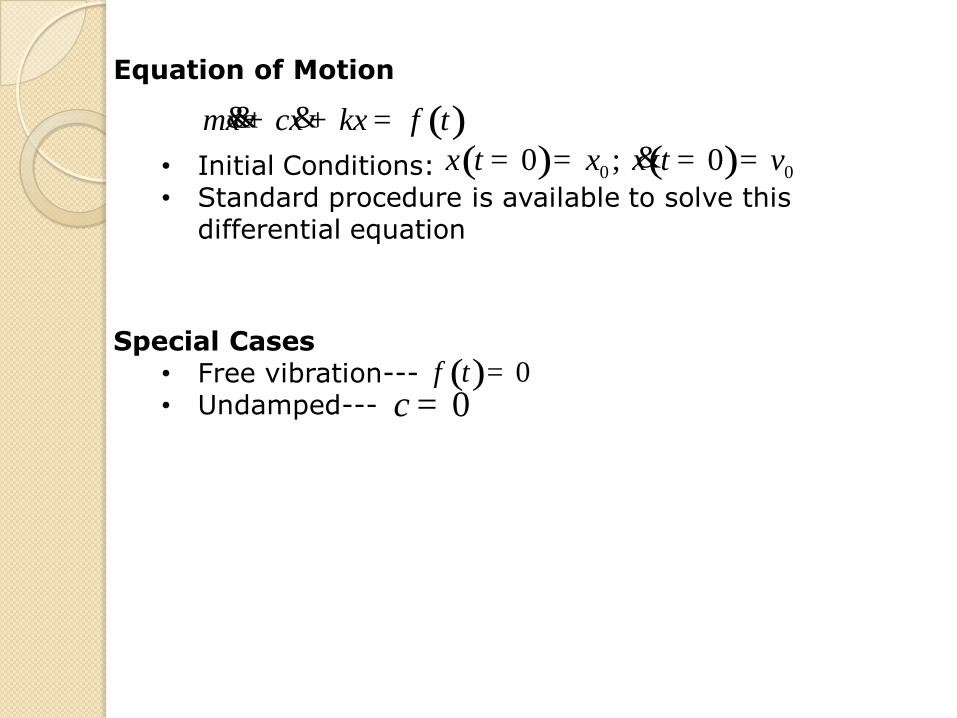
Equation of Motion
• Initial Conditions:• Standard procedure is available to solve this
differential equation
( )mx cx kx f t+ + =&& &
( ) ( )0 00 ; 0x t x x t v= = = =&
Special Cases• Free vibration---• Undamped---
( ) 0f t =
0c =

Undamped Free
Vibration
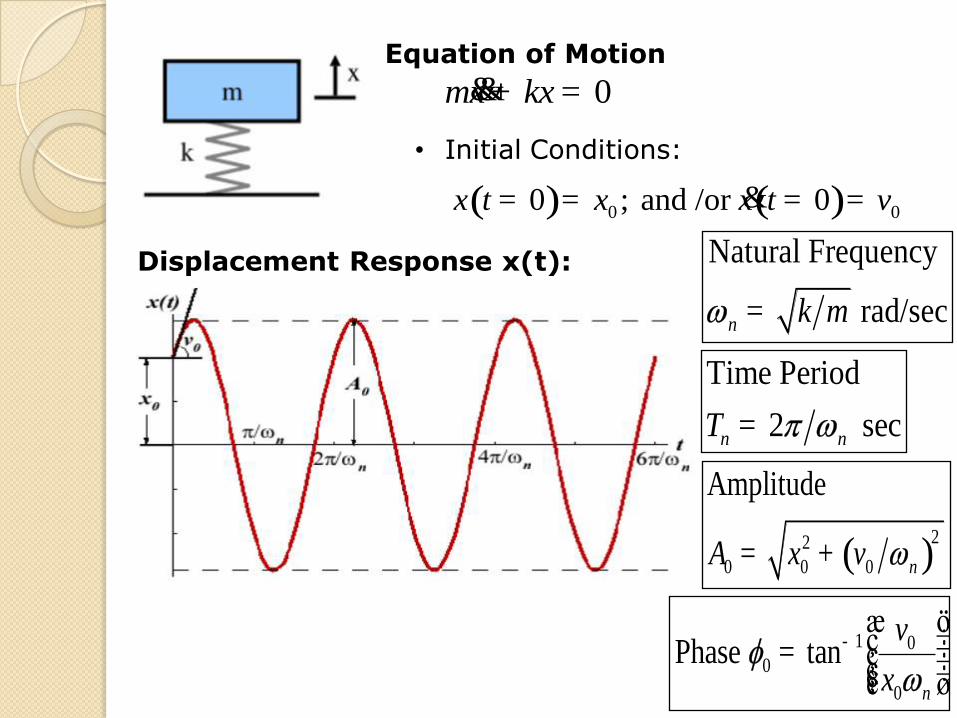
Equation of Motion
• Initial Conditions:
( ) ( )0 00 ; and /or 0x t x x t v= = = =&
0mx kx+ =&&
Displacement Response x(t): Natural Frequency
rad/secn k m =
Time Period
2 secn nT =
( )22
0 0 0
Amplitude
nA x v = +
1 00
0
Phase tann
v
x
-æ ö÷ç ÷= ç ÷ç ÷çè ø
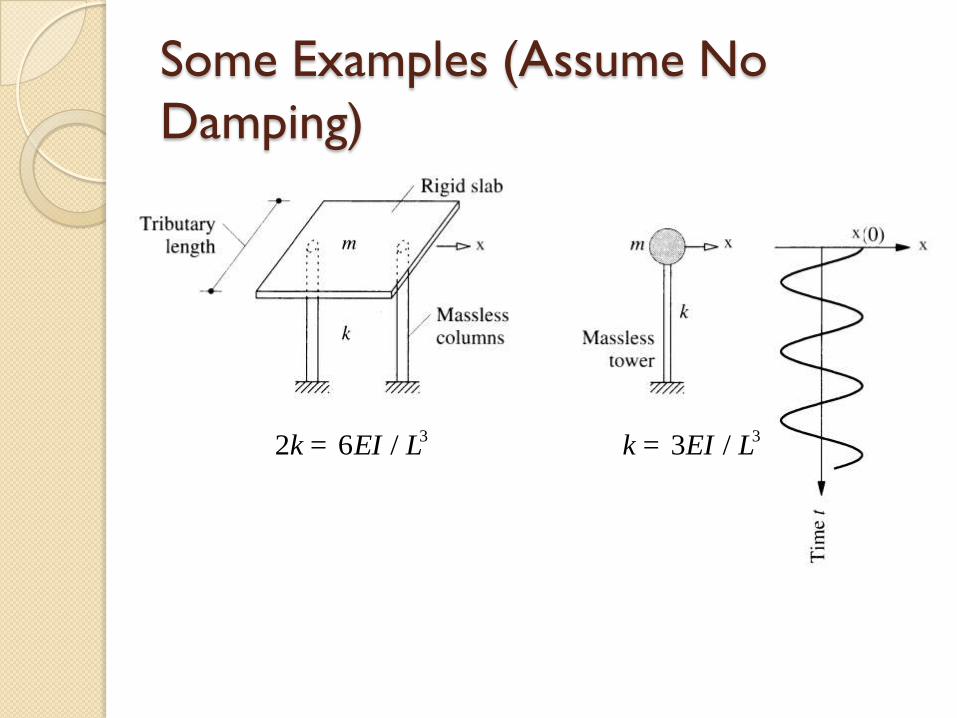
Some Examples (Assume No
Damping)
33 /k EI L=32 6 /k EI L=

Damped Free Vibration

Equation of Motion
• Initial Conditions:
( ) ( )0 00 ; and /or 0x t x x t v= = = =&
0mx cx kx+ + =&& &
Displacement Response x(t):
Provided system parameters satisfy certain condition:
2 critical damping
1 damping ratio
cr
cr
c km
c c
= =
= < ®
0
0 0
tan D
n
x
v x
=
+
( )sinnt
Dx e t -
= +
1/22
2 0 00
n
D
v xx
é ùæ ö+ê ú÷ç ÷= + çê ú÷ç ÷çè øê úë û
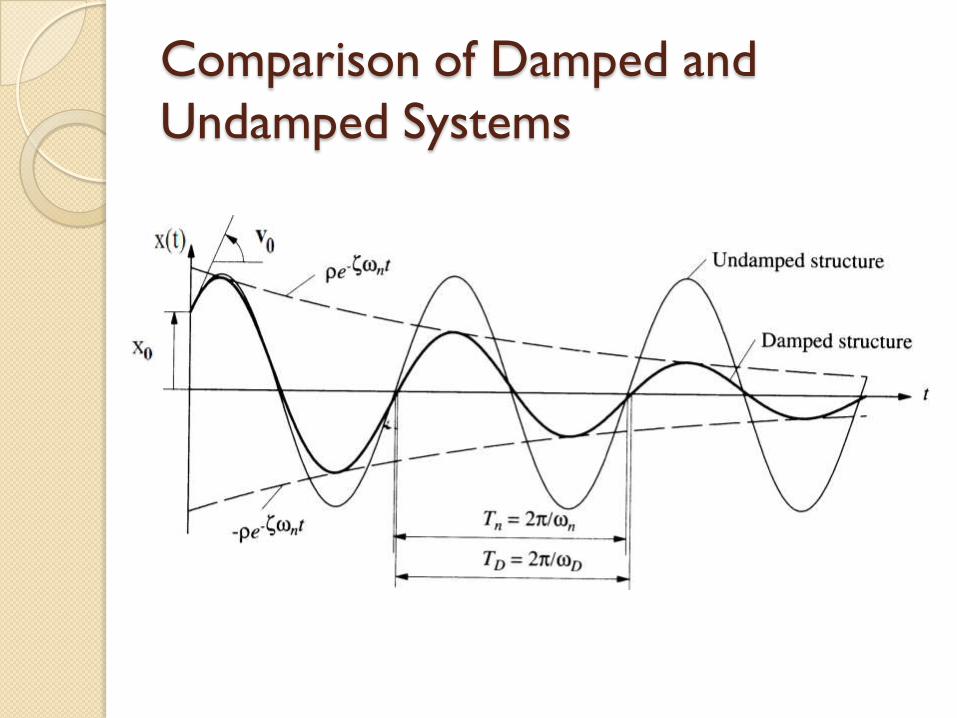
Comparison of Damped and
Undamped Systems
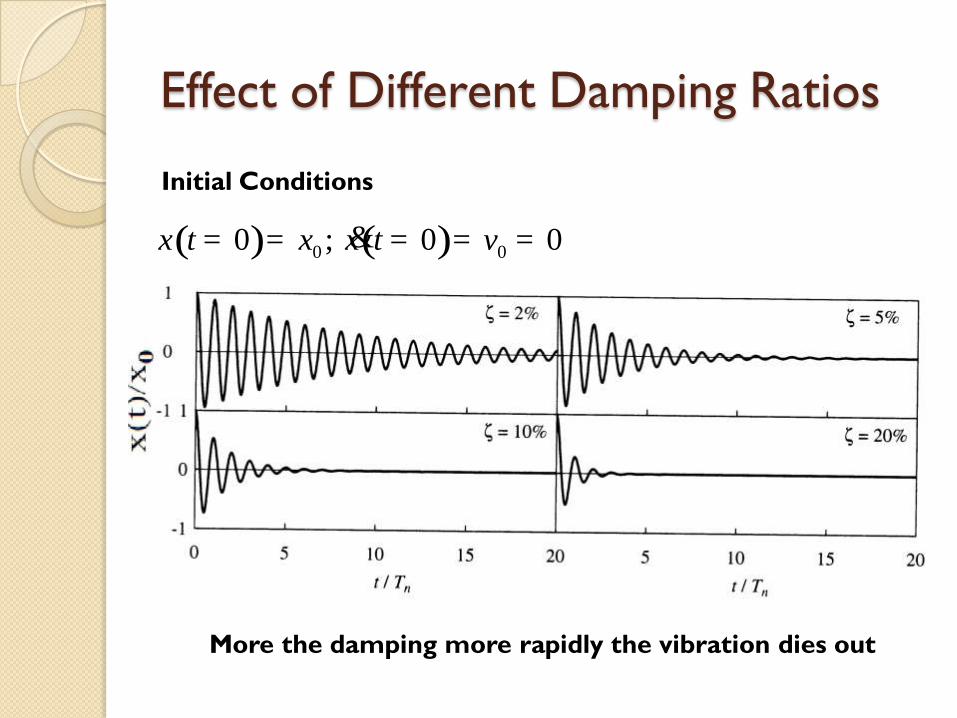
Effect of Different Damping Ratios
( ) ( )0 00 ; 0 0x t x x t v= = = = =&
Initial Conditions
More the damping more rapidly the vibration dies out

Logarithmic Decay and Estimation
of Damping
Amplitude ratio in two successive cycles
21
2exp
1
n DTi
i
xe
x
+
æ ö÷ç ÷ç= = ÷ç ÷ç ÷÷ç -è ø 1
1ln
2
i
i
x
x
+
æ ö÷ç ÷» ç ÷ç ÷çè ø
Damping can be estimated from free vibration test

Undamped Forced Vibration
due to Harmonic Loading

Consider a Sinusoidal Force
0( ) sin is forcing frequencyf t p t = ®
Governing Equation
0 sinmx kx p t+ =&& ( ) ( )0 00 ; 0x t x x t v= = = =&Initial Conditions
General Solution
( ) ( ) ( )c px t x t x t= +
( ) Complementary Function
Homogeneous Solution
cx t =
=
( ) Particular Integralpx t =
Transient
Steady State

Special case
0 0 00; ; 0.2n nx v p k = = =
( ) 00Displacement due to amplitude of load if
applied statically (maximum static response)
stx p k= =
( )( )
0
2
1sin
1p
n
px t t
k
é ùê ú= ê ú
-ê úë û
Consider only steady
state motion
Maximum steady
state response
( )
00 2
1
1p
n
px
k
é ùê ú= ê ú
-ê úë û

Deformation Response Factor
( ) ( )
0
2
0
Absolute Maximum Steady State Response 1
Maximum Static Response 1
p
d
st n
xR
x = = =
-
( ) ( ) ( )0
sinp st dx t x R t = -
Consider only steady state response
0
180
n
o
n
í <ïï® = ìï >ïî
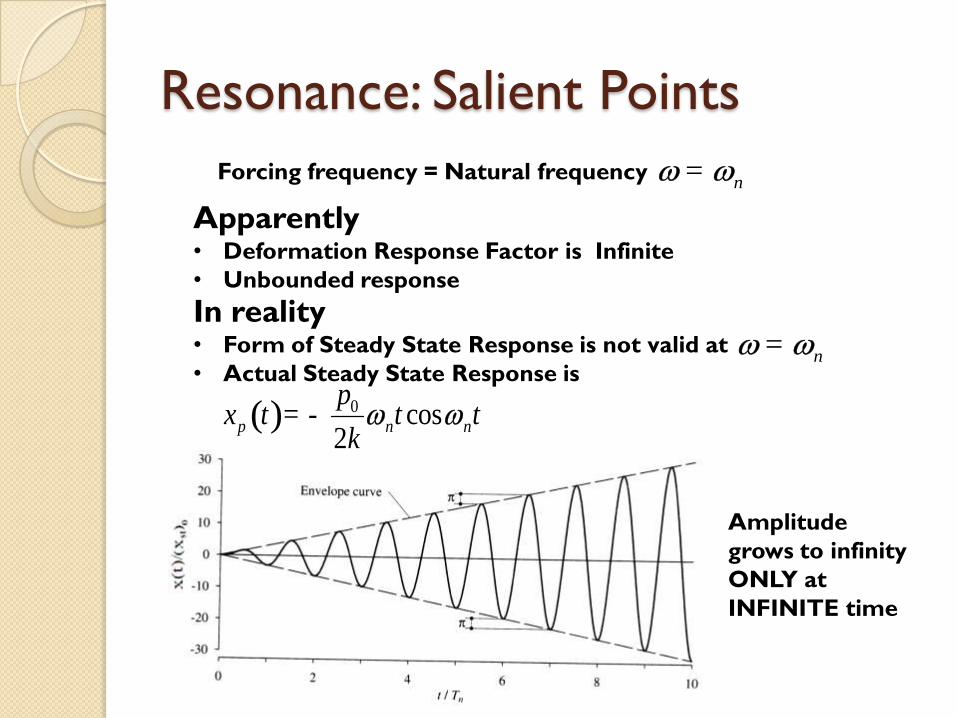
Resonance: Salient Points
Forcing frequency = Natural frequency n =
Apparently• Deformation Response Factor is Infinite
• Unbounded response
In reality• Form of Steady State Response is not valid at
• Actual Steady State Response isn =
( ) 0 cos2
p n n
px t t t
k = -
Amplitude
grows to infinity
ONLY at
INFINITE time
Damped Forced Vibration
due to Harmonic Loading

Consider Once again the same Sinusoidal Force
0( ) sin is forcing frequencyf t p t = ®
Governing Equation is now
0 sinmx cx kx p t+ + =&& & ( ) ( )0 00 ; 0x t x x t v= = = =&Initial Conditions
General Solution is, as before,
( ) ( ) ( )c px t x t x t= +
( ) Complementary Function
Homogeneous Solution
cx t =
=
( ) Particular Integralpx t =
Transient
Steady State
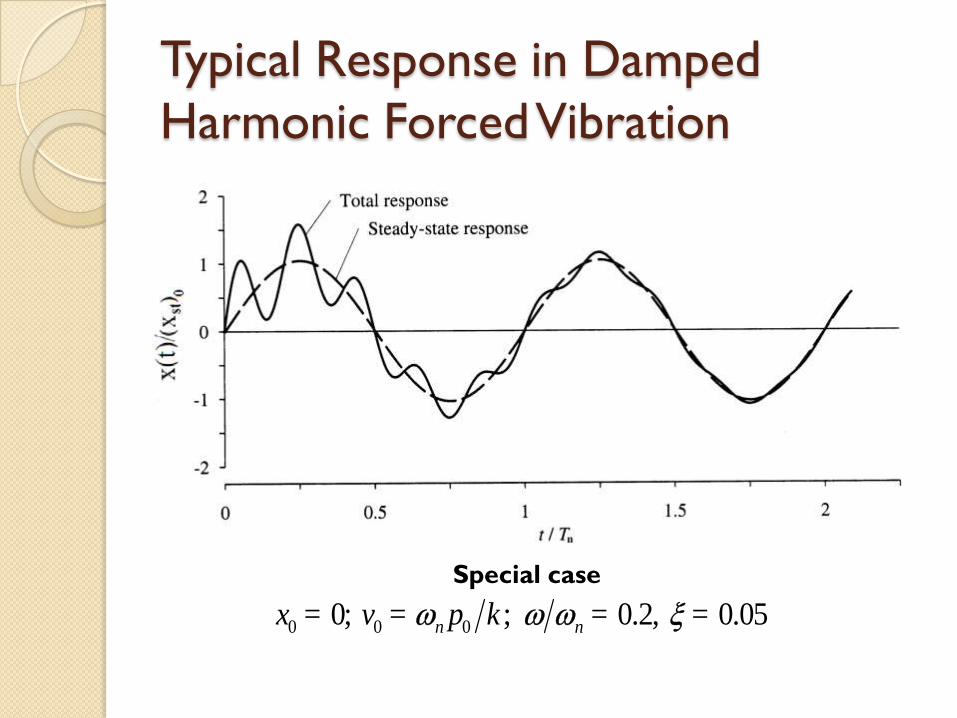
Typical Response in Damped
Harmonic Forced Vibration
Special case
0 0 00; ; 0.2, 0.05n nx v p k = = = =

Resonance in Damped System
n =
For a Special Case of Zero Initial Conditions and 5% Damping
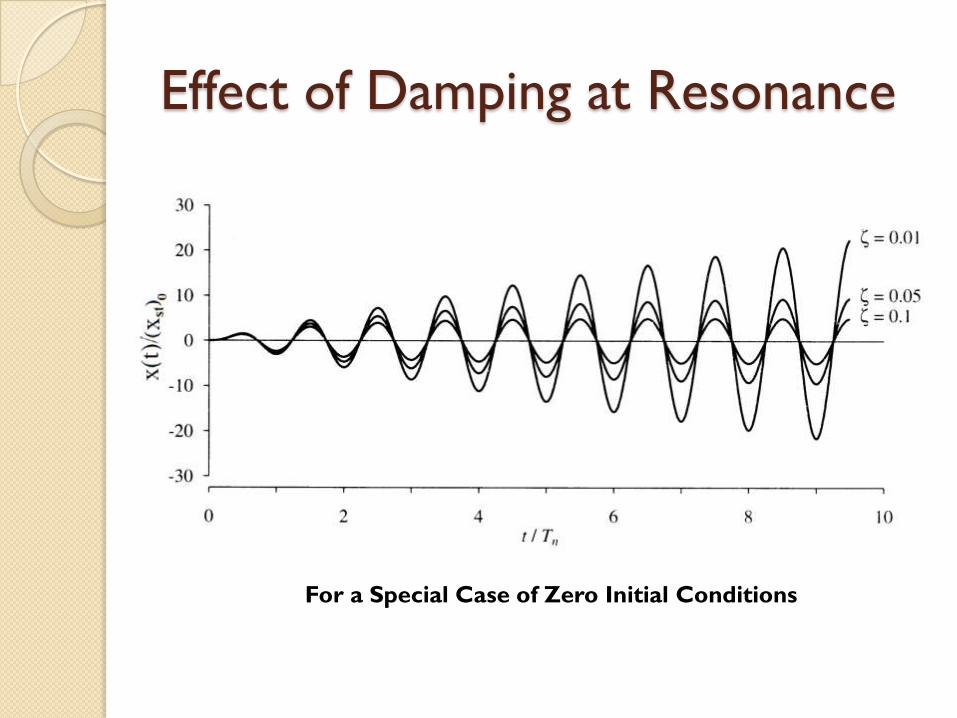
Effect of Damping at Resonance
For a Special Case of Zero Initial Conditions

Deformation Response Factor
( )
0
0
Absolute Maximum Steady State Response
Maximum Static Response
p
d
st
xR
x= =
( ) ( ) ( )0
sinp st dx t x R t = -
Consider only steady state response
( ){ } ( ){ }
( )
( )22 22
21; tan
11 2
n
d
nn n
R
= =-
- +
1
1
1n
í< <ïïïï »ìïï> >ïïî
Response to Arbitrary Force
by Duhamel’s Integral
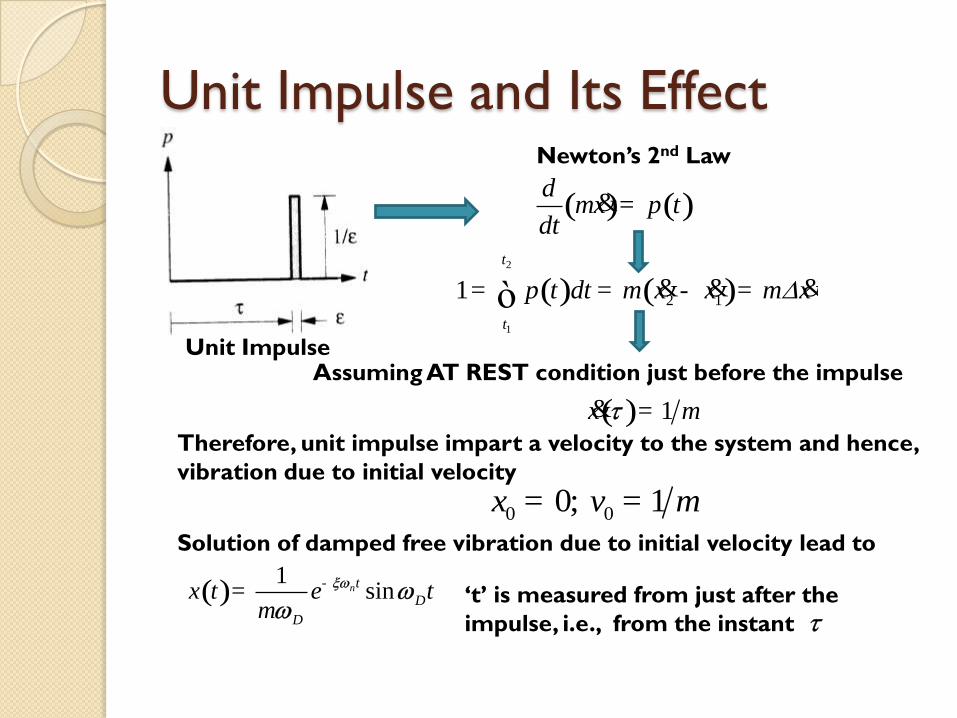
Unit Impulse and Its Effect
Unit Impulse
Newton’s 2nd Law
( ) ( )d
mx p tdt
=&
( ) ( )2
1
2 11
t
t
p t dt m x x m x= = - =ò & & &
Assuming AT REST condition just before the impulse
( ) 1x m =&
Therefore, unit impulse impart a velocity to the system and hence,
vibration due to initial velocity
0 00; 1x v m= =
Solution of damped free vibration due to initial velocity lead to
( )1
sinnt
D
D
x t e tm
-= ‘t’ is measured from just after the
impulse, i.e., from the instant

Unit Impulse Response Function
( ) ( ) ( ) ( )1
sinn t
D
D
x t e t h t tm
- - é ù= - = - ® ³ë û
If ‘t’ is measured from the instant when is measured
Unit Impulse Response Function, i.e., Response due to unit impulse
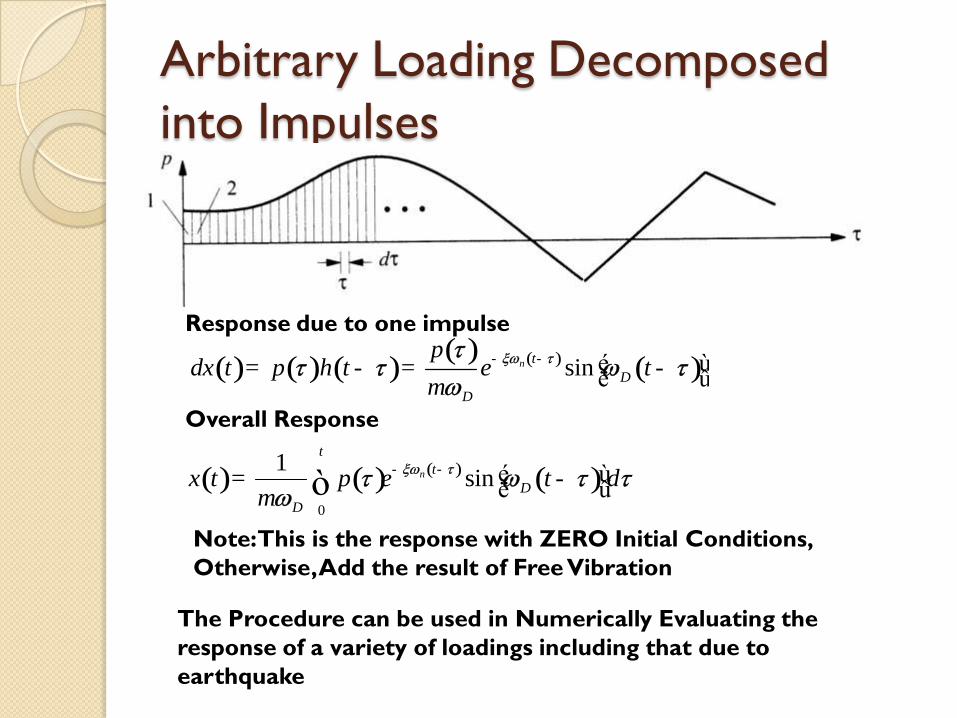
Arbitrary Loading Decomposed
into Impulses
( ) ( ) ( )( ) ( ) ( )sinn t
D
D
pdx t p h t e t
m
- - é ù= - = -ë û
( ) ( ) ( ) ( )0
1sinn
t
t
D
D
x t p e t dm
- - é ù= -ë ûò
Response due to one impulse
Overall Response
Note: This is the response with ZERO Initial Conditions,
Otherwise, Add the result of Free Vibration
The Procedure can be used in Numerically Evaluating the
response of a variety of loadings including that due to
earthquake

Thank You
Top Related