







Languages
Pages
Legal


University of California, Santa Barbara
An Integrated System of 3D Motion Tracker and Spatialized
Sound Synthesizer
John Thompson (Music)
Mary Li (ECE)
Michael Quinn (ECE)

University of California, Santa Barbara
Goal
• Develop an interactive music synthesis system while exploring tracking and surveillance technologies, spatial music composition strategies, and sound synthesis techniques
University of California, Santa Barbara
Hardware & Software
• Unibrain Fire-I Cameras
• PC Running Windows XP
• Apple Powerbook and G5
• Intel’s OpenCV Libraries
• Max/MSP/Jitter
• SuperCollider

University of California, Santa Barbara
Project Summary
• 2D Tracking• Camera Calibration• 3D Position Calculation• Composition and Sound Synthesis

University of California, Santa Barbara
2D Tracking – Temporal Difference• Temporal Difference
– Subtract previous frame from the current frame to see what has changed.
University of California, Santa Barbara
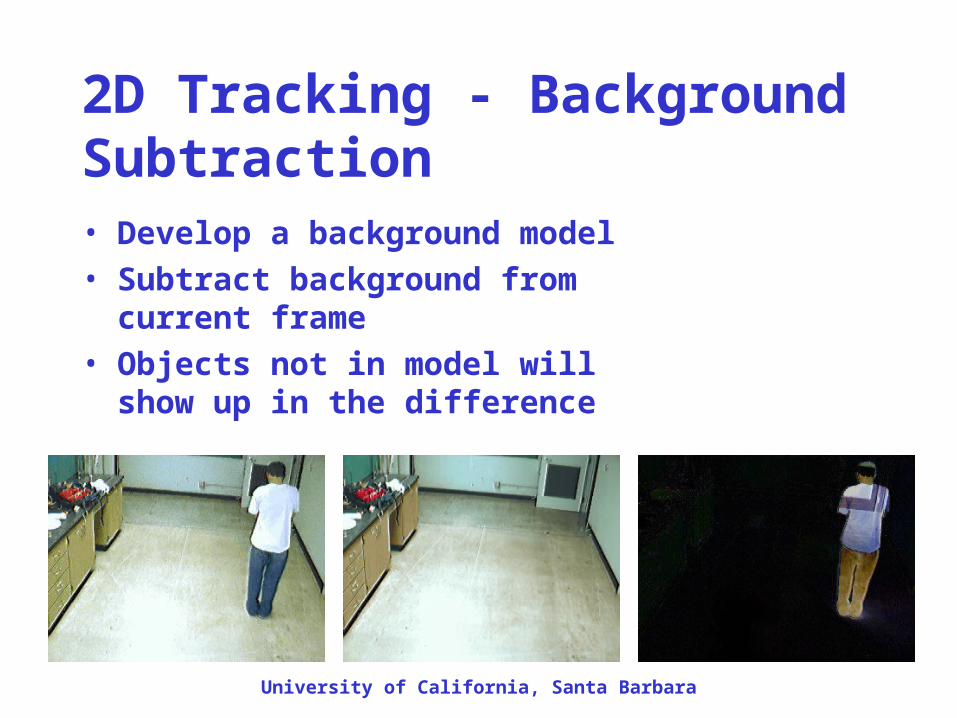
2D Tracking - Background Subtraction• Develop a background model
• Subtract background from current frame
• Objects not in model will show up in the difference
University of California, Santa Barbara
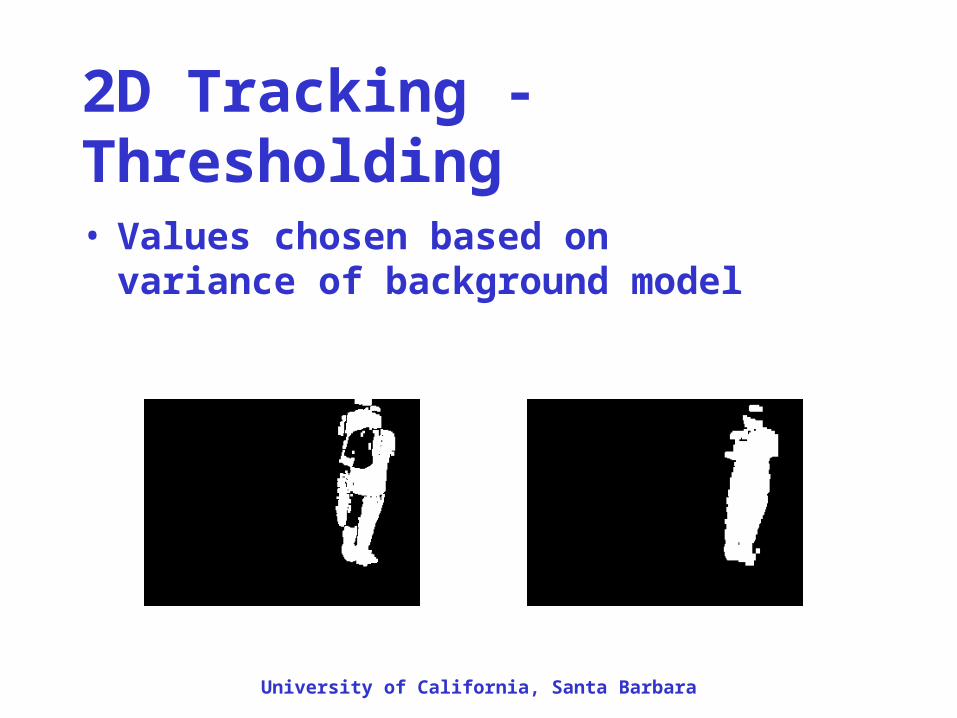
2D Tracking - Thresholding
• Values chosen based on variance of background model

University of California, Santa Barbara
2D Tracking – Center of Mass
• For now, we assume that only one object is being tracked. Thus, the image center of mass approximates the object center of mass.
• Center of Mass is then sent to the 3D section.

University of California, Santa Barbara
Camera Calibration
• Purpose– A preparation for 3D estimation from 2D
images
• Methods– Matlab camera calibration toolbox– Intel OpenCV calibration functions

University of California, Santa Barbara
Camera Calibration -- intrinsic parameters
•Focal lengths: fx, fy
•Principal points: px, py
•Distortions: radial and tangential distortion coefficients
DirectShow Filter runs under MS Windows

University of California, Santa Barbara
Camera Calibration -- intrinsic parameters•Defines pixel coordinate points with respect to camera coordinate system
Ximage = Mintr Xcamera
Matlab Camera Calibration Toolbox

University of California, Santa Barbara
Camera Calibration -- extrinsic parameters•Defines camera coordinate points with respect to world coordinate system Xcamera = Mextr Xworld
OpenCV calibration routine (based on intrinsic parameters)
left camera view center camera view right camera view

University of California, Santa Barbara
3D Tracking -- methods
• Obtain 2D motion centroid information
•Epipolar Geometry
•Least Square

University of California, Santa Barbara
3D Tracking -- results
floor plan of visible space 18-pt tracking example
X_world Y_world Z_world
University of California, Santa Barbara
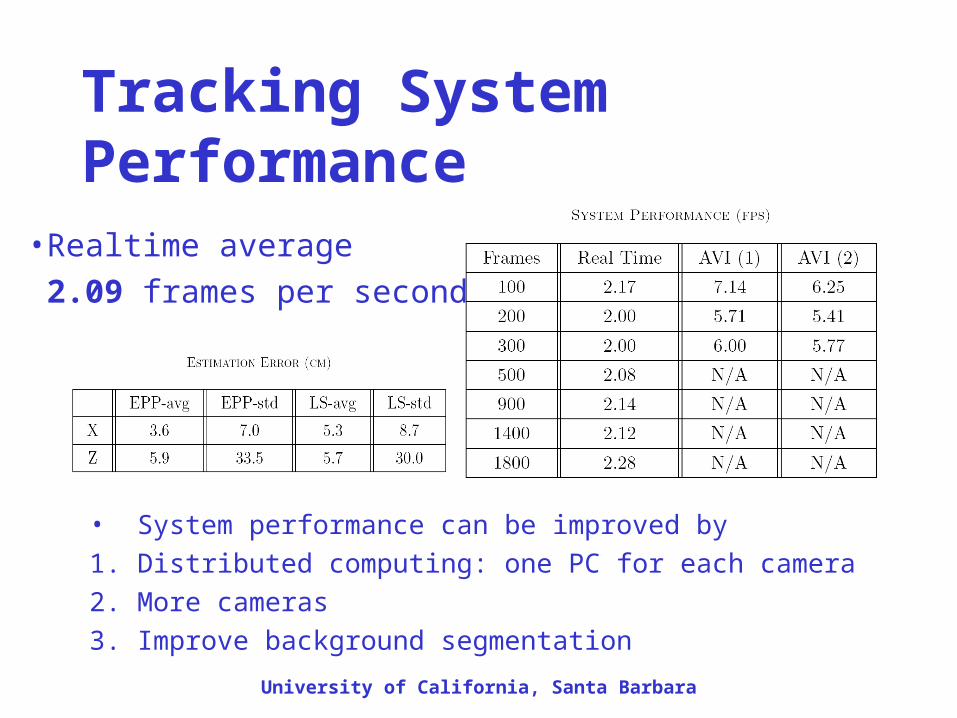
Tracking System Performance
•Realtime average
2.09 frames per second
• System performance can be improved by
1. Distributed computing: one PC for each camera
2. More cameras
3. Improve background segmentation
University of California, Santa Barbara
TransMedia Systems
Trans-media systems exist as independent engines behind artistic manifestations in diverse media.
Input:In the case of our Motion Tracking System project, the implementation of a Motion Tracking algorithms tracking objects within a sensor space serves as a principle component to power the trans-media system.
Transformation:In the middle layer, the data from the Motion Tracking system is interpreted and labled. This data is then used to determine the activity and state of the sensor space.
Output:In the final stage of the trans-media system, specific media, such as sound, use the middle layer data to inform their processes. The sound is projected into the sensor space. Interactivity is enhanced when the participants in the sensor space become aware of their relationship with the system.
Graphic Notations and Trans-media Systems: John Cage “Fontana Mix”
University of California, Santa Barbara
Spatial Composition Strategies -- Sonic Nodes
• A system of nodes are layed out in the virtual space. The system of nodes is comprised of Generative Nodes and Transformative Nodes
• The nodes have an activation space surrounding them. Tracked objects activate nodes at various levels depending on the tracked objects’ measured distance from the nodes’ center.
• The nodes are in flux and adjust their positions over time to reflect the history of the space

University of California, Santa Barbara
When a tracked object moves within the activation space of a particular node, the node executes its action.
Figure 1
Nodes with various musical functions are represented by
colored circles. Different paths create unique realizations of
phrase level material in the mobile form
Chord Nodes 34
Impulse Nodes 16
Sample Playback Nodes
64
Convolution Nodes
360
Pitch-Time Shift Nodes
50

University of California, Santa Barbara
Pitch sets in the chord nodes
[0 1 3 4][0 1 5 7][0 2 3 7][0 2 4 6][0 2 4 7][0 2 4 8][0 2 5 6][0 2 5 7][0 2 5 8][0 2 6 7][0 2 6 8][0 3 5 6][0 3 5 7][0 4 5 8]
Thirty-four chordNodes are scattered in the virtual space. Seventeen of the chordNodes contain a unique four note pitch set.
Fourteen of the Seventeen sets are unique in their normal order. Although the pitch sets are diverse, they are closely knitted in their makeup. This lends a unified quality to the pitched verticalities of the sonic space.
As multiple users move throughout the space, the sonic material subtlely shifts, melding the space into a cohesive flow.
Tracked objects leave histories of their paths in the space, the pitchSets transform in response. The space adapts its pitched contents to the actions of the users of the space.

University of California, Santa Barbara
Sound Spatialization
The system outputs quadraphonic audio
distributed to speakers surrounding the sensor
space. The position of the sounds within the
sensor space is determined by the position of
the tracked object. (Figure 1)
Distance is simulated through direct sound
to reverberant sound mixture. This ratio is
dictated by the following formulas:
Direct Sound Amplitude1/zPosition.abs
Reverb Sound Amplitude = 1/zPosition.abs.sqrt
Figure 1
Sensor Space
Speakers
Object Position
University of California, Santa Barbara
Future Work
• Improve the system by enabling the tracking of multiple objects as well as incorporating features such as shape, size, and color.
• Improve integration with the musical synthesis system.

University of California, Santa Barbara
• Professor B.S. Manjunath
• Professor G. Legrady
• Professor J. Kuchera-Morin
• NSF IGERT Program
• Fellow IGERTers
Special Thanks

University of California, Santa Barbara
Q ??
Top Related