




Languages
Pages
Legal

8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
1/48
Unit 2: Integrated-circuit amplifiers
INTRODUCTION
This chapter begins with a brief discussion on the design philosophy of integrated
circuits, and how it differs from that of discrete circuits. Next is the comparison of MOS& BJT in terms of their parameters, characteristics and models. This is followed by
current mirror circuits and steering circuits. These circuits are realized using both MOS
and BJTs. The chapter ends with general considerations in high frequency response of
amplifiers.
IC DESIGN PHOLOSOPHY
Integrated-circuit fabrication technology poses constraints on-and provides
opportunities to- the circuit designer. Thus, while chip-area considerations dictate that
large-and even moderate-value resistors are to be avoided, constant-current sources are
readily available. Large capacitors, for signal coupling and bypass, are not to be used,
except perhaps as components external to the IC chip. Even then, the number of such
capacitors has to be kept to a minimum; otherwise the number of pin terminals and hence
its cost increase. Very small capacitors, in the picofarad and fraction of picofarad range,
however, are easy to fabricate in IC MOS technology and can be combined with MOS
amplifiers and MOS switches to realize a wide range of signal processing functions, both
analog and digital.
As a general rule, in designing IC MOS circuits, one should strive to realize as many
of the functions required as possible using MOS transistors only and, when needed,
small MOS capacitors. MOS transistor can be sized; that is, their W and L values can
be selected, to fit a wide range of requirements. To pack a larger number of devices on
the same IC chip, the trend has been to reduce the device dimensions. CMOS process
technologies capable of producing devices with a 0.1m minimum channel length are in
use. Such small devices need operate with dc voltage supplies close to 1V. While low-
voltage operation can help to reduce power dissipation, it poses lot of challenges to the
circuit designer. For example, such MOS transistors must be operated overdrive voltages
of only 0.2V or so.
The MOS-amplifier circuits that we shall study will be designed almost entirely
using MOSFETs of both polarities-that is, NMOS and PMOS.They are readily available
in CMOS process technology. As mentioned earlier, CMOS is currently the most widely
used IC technology for both analog and digital as well as combined analog and
digital(or mixed-signal)applications. Nevertheless, bipolar integrated circuit still offer
many exciting opportunities to the analog design engineer. This is especially the case for
general-purpose circuit packages, such as high-quality op amps that are intended for
1
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
2/48
assembly on printed-circuit(pc) board. As well, bipolar circuits can provide much higher
output currents and are favoured for certain applications, such as in the automotive
industry, for their high reliability under severe environment conditions. Finally, bipolar
circuits can be combined with CMOS in innovative and exciting ways.
Introduction to MOSFET Scaling
In 1965, G.E. Moore predicted that the number of transistors in ICs would double
after every two years. This prediction has come true and todays Pentium processor
accommodates approximately 14.2million transistors in 1.7 x 2 cm2.The only way to
assemble a large number of transistors in given silicon area is to reduce the size of the
transistor. The process of reducing vertical and horizontal dimensions of MOSFETs is
called scaling. In order to meet Moores law, the channel length (L) and width (W) of the
MOSFET are reduced by a factor 0.7. If we reduce by a factor of 0.7, the area of the
MOSFET, which is W X L, reduces by half. Hence, in the given area we can assemble
double the number of transistors.
Scaling is defined as the process of reducing the horizontal and vertical
dimensions of a MOS device by some scaling factor S, which is greater than 1. Thus, the
scaled device is obtained by simply dividing the key dimensions of the MOSFET such as
channel length (L), channel width (W),oxide thickness(tox), and junction depth (Xj),by
scaling factor S. MOSFET scaling offers several benefits such as increased component
density, increase speed, reduction in power consumption, and cost per chip.
Two type of schemes commonly used for MOSFET scaling are constant voltage scaling
are constant-field scaling.
Constant Field Scaling: In constant-field scaling, the MOSFET dimensions as well
as supply voltages are scaled by the same scaling factor S, greater than 1.The scaling of
supply and terminal voltage maintains the same electric field as that of original device;
hence such scaling is termed constant-field scaling. Such scaling is also called full
scaling, as the geometric dimensions and supply voltages are scaled simultaneously. In
order to maintain charge and electric field relationship, the doping densities are scaled by
scaling factor S. Constant scaling offers benefits such as increased component density,
increased speed, decreased cost, etc. The impact of constant-field scaling on the physical
parameters of the MOSFET is summarized in below table. Let MOSFET current beforescaling be given by
Idsn Cox(VGS-Vt)2
where Vtis threshold voltage. After constant field scaling, the drain current becomes,
2
Idsn S Cox(VGS/S- Vt/S)2
Ids= Ids/S
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
3/48
Hence, the drain current decreases by scaling factor S. Now, before scaling, delay is
given by
Where C is the load capacitance, V is supply voltage, and I is the charging current. we
know that in constant field scaling, C,V and I decrease by a factor of S; hence, the delay
after scaling is given by
The impact of constant-field scaling on the physical parameters of the MOSFET is
summarized in the table below:
Parameters Before Scaling After Scaling
Channel width W W/S
Channel length L L/S
Area WL WL/S2
Oxide Thickness Tox Tox/S
Oxide capacitance Cox SCox
Threshold voltage VTO VTO
Supply Voltage VDD VDD/S
Gate Voltage VGS VGS/S
Drain Voltage VDS VDS/S
Doping density NA NAS
Constant-Voltage Scaling: In constant-voltage scaling, the geometrical dimensions of
the MOSFET are scaled by the scaling factor S while the supply and terminal voltage
are kept constant. In addition to this, the densities are increased by the factor of S2 to
maintain the charge electric field relationship. Such scaling is also known as partial
scaling because scaling applied only physical dimensions and not to voltages. In this
scheme, all voltages are kept constant to maintain the logic level as that of the original
device to provide a compatible interface with peripheral circuitry such as I/O devices.
3
=
= = /S (1)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
4/48
The impact of constant-voltage scaling on the physical parameters of the MOSFET is
summarized in the table below:
Parameters Before Scaling After Scaling
Channel width W W/S
Channel length L L/S
Area WL WL/S2
Oxide Thickness Tox Tox/S
Oxide capacitance Cox S Cox
Threshold voltage Vt Vt
Supply Voltage VDD VDD
Gate Voltage VGS VGS
Drain Voltage VDS VDS
Doping density NA NAS2
From Eq.(1) it is clear that in constant-field-scaling, delay decreases by a factor S, while
in constant-voltage scaling, delay decreases by the factor S2. Hence, in constant-field
scaling improvement in delay is less as compared to constant-voltage scaling. However,
power in constant-field scaling is less and power density before and after the scaling
remains the same. Thus with the slightest penalty in delay, constant-field scaling offers
several advantages compared to constant-voltage scaling. For example, as physical
dimensions and voltages are scaled simultaneously by the same factor the electric fields
as well as the power density before and after scaling remains the same. Therefore,
constant-field scaling improves the reliability of the scaled device, circuits and systems as
compared to constant-voltage scaling.
Impact of constant-voltage scaling on electrical properties of MOSFET. Let CGSbe
the total gate oxide capacitance before scaling given by
Gate capacitance after scaling is given by
Thus the total gate capacitance after scaling decreases by a factor of S. Similarly, we
can also show that other parasitic capacitances as well as interconnect capacitances will
decrease by scaling factor S. This is a very important result of scaling and applicable to
both constant-voltage and constant-field scaling. Let the MOSFET drain current before
4
CGS= COXWL= (ox/Tox)WL
CGS= COX(W/S)(L/S) =[ox/(Tox/S)](W/S)(L/S) = CGS/S ..(2)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
5/48
scaling be Ids, which is given by
After scaling, the drain current becomes
Thus, in constant-voltage scaling, drain current increases by a factor of S. The most
important parameter used to compare MOSFET performance is delay, which is given by
CV/I , where is C is the load capacitance, V is the supply voltage and I , the charging
and discharging current. From eqn(2) and (3) , it is clear that in constant-voltage scaling
the total capacitance decreases by factor S, while the current is increased by the same
factor S. This decreases the delay of scaled device by S2. In constant voltage scaling,
the power dissipation , which is a product of current and voltage, increases by a factorof S. Similarly the power density, which is defined as the power per unit area increases
by a factor of S3.In addition to the increased power density, constant-voltage scaling
also increases the internal peak electric-fields. The combined effect of increased power
density and electric-field eventually leads to device reliability problems, such as oxide
break-down and electro-migration. Hence constant field scaling is preferred to constant-
voltage scaling.
Short-Channel Effects and Recent Scaling Trends: We have seen that to achieve
higher integration density and performance, channel lengths of MOSFETs have been
continuously reduced as shown in Table 1. However, in short-channel MOSFETs, suchbenefits are obtained at the cost of increased short-channel effects, such as the following:
1. Drain induced barrier lowering (DIBL)
2. Punch through effect
3. Threshold voltage roll-off
4. Gate tunneling currents
5. Hot carrier effect
Drain induced barrier lowering (DIBL) A MOSFET is considered a short-channel
device when its channel length is of the order of the depletion widths of the source/drain
junctions. In a long-channel MOSFET. when gate voltage is sufficiently smaller than
threshold voltage, electrons from the source region are prevented from entering into the
channel due to the potential barrier of the source-channel junction. However, in short-
channel devices, this barrier is lowered by the drain electric field, which eventually
allows electron flow into the channel. This flow of electrons gives rise to the drain
current, which in turn gives rise to sub-threshold leakage current and static leakage
power. In short-channel devices, DIBL effect is controlled by increasing the channel
5
IdsnCox(VGS- Vt)2
IdsnSCox(VGS- Vt)2 = S Ids .(3)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
6/48
doping; however, such increased doping will degrade the carrier mobility and, hence, the
drain current.
Punch through effectWe know that in short-channel devices, channel lengths are of the
order of the source/drain depiction region thickness. When drain voltage is increased, thedrain depletion region touches the source depletion region. This condition is known as the
punch through effect, in which gate voltage loses the control of the channel and the drain
current increases sharply. The punch through effect is reduced by using thin gate oxide
and high channel doping.
Threshold voltage roll-offFor MOSFETs, the threshold voltage expression is derived
with the assumption that the depletion bulk charge in the channel region is due to gate
voltage. This assumption is valid only for long-channel devices, as the contribution of
source/drain depletion charge to channel depletion charge is negligible. However, as
channel lengths are reduced, the contribution of source/drain depletion charge increases;hence, the expression for threshold voltage predicts higher threshold voltage than the
actual value. Therefore, in short-channel devices, as channel lengths are reduced, the
contribution of source/drain depletion charge to total charge in the channel region
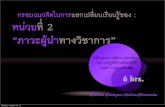
increases and, hence, the threshold voltage decreases as shown in Fig. 1. The reduction in
threshold voltage eventually leads to higher sub-threshold leakage currents, which results
in increased static power dissipation.
0.05 0.1 0.2 0.5 1 urn 2 urn
5 um 10 urn
Channel length
FIGURE 1 : Threshold voltage roll-off.
Gate tunneling currentsshort-channel MOSFETs require very thin gate oxide to control
the various short-channel effects, as mentioned earlier. For example, MOSFETs with a
channel length of 65 nm require gate oxide thickness of about 1.2 nm. Such a thin gate
oxide consists of only four to five atomic layers and electrons can easily tunnel through
the thin oxide. The direct tunneling of electrons across thin gate oxide eventually leads
to gate leakage current, which also increases the power dissipation. Hence, tunneling
6
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
7/48
currents limit the further scaling of oxide thickness. To overcome this problem, the
conventional silicon dioxide is replaced with high dielectric constant (high-K) materials
such as silicon nitride, hafnium oxide, etc. The high-K material allows higher physical
thickness than the conventional silicon dioxide thickness for the same capacitance.
Therefore, high-K materials decrease gate tunneling currents and allow further scaling ofMOS transistors.
Hot carrier effect The reduction of MOSFET dimensions to achieve higher integration
density and performance increases lateral and vertical electric fields in the device. The
increased electric field increases the velocity of electrons and holes and, hence, their
kinetic energy. Electrons and holes with high kinetic energy are known as hot electrons
and hot holes, respectively. Due to high vertical electric field, hot electrons and holes
strike or penetrate into the oxide and get trapped at the Si-Si02interface as well as in the
oxide. These trapped carriers modulate the threshold voltage of MOSFETs and degrade
the reliability.
COMPARISON OF THE MOSFET AND THE BJT
In this section we present a comparison of the characteristics of the two major electronic
devices: the MOSFET and the BJT. To facilitate this comparison, typical values for the
important parameters of the two devices are first presented.
Typical Values of MOSFET Parameters
Typical values for the important parameters of NMOS and PMOS transistors fabricatedin a number of CMOS processes are shown in Table. Each process is characterized by
the minimum allowed channel length, Lmin,thus, for example, in a 0.18-m process, the
smallest transistor has a channel length L = 0.18 m. The technologies presented in
Table are in descending order of channel length, with that having the shortest channel
length being the most modern. Although the 0.8-m process is now obsolete, its data are
included to show trends in the values of various parameters. It should also be mentioned
that although Table stops at the 0.18-m process, at the time of this writing (2003),
a 0.13-m fabrication process is commercially available and a 0.09-m process is in
the advanced stages of development. The 0.18-m process, however, is currently the
most popular and the one for which data are widely available. The trends shown help
us to illustrate design trade-offs as well as enable us to work out design examples and
problems with parameter values that are as realistic as possible.
7
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
8/48
TABLE 3 : Typical Values of CMOS Device Parameters
As indicated in Table-3, the trend has been to reduce the minimum allowable channel
length. This trend has been motivated by the desire to pack more transistors on a chip as
well as to operate at higher speeds or, in analog terms, over wider bandwidths.
Observe that the oxide thickness, tox, scales down with the channel length, reaching 4
nm for the 0.18-m process. Since the oxide capacitance Cox is inversely proportional
to tox, we see that Cox increases as the technology scales down. The surface mobility
decreases as the technology minimum-feature size is decreased, and pdecreases much
faster thann. As a result, the ratio of ptonhas been decreasing with each generation
of technology, falling from about 0.5 for older technologies to 0.2 or so for the newer
ones. Despite the reduction of ) nandp, the transconductance parameters k'n=nCox
and k'p= nCoxhave been steadily increasing. As a result, modern short-channel devices
achieve required levels of bias currents at lower overdrive voltages. As well, they achieve
higher transconductanc, a major advantage.
Although the magnitudes of the threshold voltages Vtn and Vtp have been decreasing
withLmiafrom about 0.7-0.8 V to 0.4-0.5 V, the reduction has not been as large as that
of the power supply VDD. The latter has been reduced dramatically, from 5 V for older
technologies to 1.8 V for the 0.18-m process. This reduction has been necessitated by
die need to keep the electric fields in the smaller devices from reaching very high values.
Another reason for reducing VDD is to keep power dissipation as low as possible given
that the IC chip now has a much larger number of transistors.1
The fact that in modern short-channel CMOS processes |V t| has become a much larger
proportion of the power-supply voltage poses a serious challenge to the circuit design
engineer. Recalling that | VGS| = | Vt| +|Vov|, where Vov is the overdrive voltage, to keep
8
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
9/48
| VGS| reasonably small, |Vov| for modern technologies is usually in the range of 0.2 V to
0.3 V. To appreciate this point further, recall that to operate a MOSFET in the saturation
region. |VDS| must exceed | Vov|; thus, to be able to have a number of devices stacked
between the power-supply rails in a regime in which VDDis only 1.8 V or lower, we need
to keep |V0V| as low as possible. We will shortly see, however, that operating at a low |Vov| has some drawbacks.
Another significant though undesirable feature of modern submicron CMOS technologies
is that the channel length modulation effect is very pronounced. As a result of V'A
steadily decreasing, which combined with the decreasing values of L has caused the Early
voltage V A = V'A L to become very small. Correspondingly, short-channel MOSFETs
exhibit low output resistances.
We know that two major MOSFET capacitances are Cgs and Cgd. While Cgs has an
overlap component, Cgd is entirely an overlap capacitance. Both Cgd and the overlapcomponent of Cgsare almost equal and are denoted Cov. The last line of Table provides
the value Covper micron of gate width. Although the normalized Covhas been staying
more or less constant with the reduction in Lmin, we will shortly see that the shorter
devices exhibit much higher operating speeds and wider amplifier bandwidths than the
longer devices. Specifically, we will, for example, see that fT for a 0.25-m NMOS
transistor can be as high as 10 GHz.
Typical Values of IC BJT Parameters
Table below provides typical values of major parameters that characterize integrated-circuit bipolar transistors. Data are provided for devices fabricated in two different
processes: the standard, old process, known as the "high-voltage process"; and an
advanced process, referred to as a "low-voltage process." For each process we show the
parameters of the standard npn transistor and those of a special type of pnp transistor
known as a lateral (as opposed to vertical as in the npn case) pnp. In this regard we
should mention that a major drawback of standard bipolar integrated-circuit fabrication
processes has been the lack ofpnp transistors of a quality equal to that of the npn devices.
Rather, there are a number of pnp implementations for which the lateral pnp is the most
economical to fabricate. Unfortunately, however, as should be evident from Table the
TABLE -4 : Typical Parameter Values for BJTs1
9
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
10/48
lateral pnp has characteristics that are much inferior to those of the npn.Note in particular
the lower value of and the much larger value of the forward transit time F that
determines the emitter-base diffusion capacitance Cde and, hence, the transistor speedof operation. The data in Table can be used to show that the unity-gain frequency of the
lateral pnp is two orders of magnitude lower than that of the npn transistor fabricated
in the same process. Another important difference between the lateral pnp and the
corresponding npn transistor is the value of collector current at which their values reach
their maximums: For the high-voltage process, for example, this current is in the tens of
microamperes range for thepnp and in the milliampere range for the npn. On the positive
side, the problem of the lack of high-quality pnp transistors has spurred analog circuit
designers to come up with highly innovative circuit topologies that either minimize the
use of pnp transistors or minimize the dependence of circuit performance on that of the
pnp.
The dramatic reduction in device size achieved in the advanced low-voltage process
should be evident from Table. As a result, the scale current Isalso has been reduced by
about three orders of magnitude. Here we should note that the base width, W B, achieved
in the advanced process is of the order of 0.1 m, as compared to a few microns in the
standard high-voltage process. Note also the dramatic increase in speed; for the low-
voltage npn transistor, F= 10 ps as opposed to 0.35 ns in the high-voltage process. As
a result, fTfor the modem npn transistor is 10 GHz to 25 GHz, as compared to the 400
MHz to 600 MHz achieved in the high-voltage process. Although the Early voltage,
VA, for the modern process is lower than its value in the old high-voltage process, it is
still reasonably high at 35 V. Another feature of the advanced processand one that is
not obvious from Tableis that for the npn peaks at a collector current of 50 A or
so. Finally, note that as the name implies, npn transistors fabricated in the low-voltage
process break down at collector-emitter voltages of 8 V, as compared to 50 V or so
for the high-voltage process. Thus, while circuits designed with standard high-voltage
process utilize power supplies of 15 V (e.g., in commercially available op amps of the
10
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
11/48
741 type), the total power-supply voltage utilized with modern bipolar devices is 5 V (or
even 3.3 V to achieve compatibility with some of the submicron CMOS processes).
Comparison of Important Characteristics
Table -5 provides a compilation of the important characteristics of the NMOS and the
npn transistors. The material is presented in a manner that facilitates comparison. It is to
be noted that the PMOS and thepnp transistors can be compared in a similar way.
TABLE 5 Comparison of the MOSFET and the BJT
11
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
12/48
12
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
13/48
13
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
14/48
Operating Conditions At the outset, we shall use active mode or active region to
denote both the active mode of operation of the BJT and the saturation-mode of operation
of the MOSFET.
The conditions for operating in the active mode are very similar for the two devices: The
explicit threshold Vt of the MOSFET has VBEon as its implicit counterpart in the BJT.
Furthermore, for modern processes, VBEonand Vtare almost equal.
Also, pinching off the channel of the MOSFET at the drain end is very similar to reverse
biasing the CBJ of the BJT. Note, however, that the asymmetry of the BJT resultsin VBCon and VBEon being unequal, while in the symmetrical MOSFET the operative
threshold voltages at the source and the drain ends of the channel are identical (V t).
Finally, for both the MOSFET and the BJT to operate in the active mode, the voltage
across the device (vDS, vCE) must be at least 0.2 V to 0.3 V.
Current-Voltage Characteristics The square-law control characteristic, iD-vGS, in the
MOSFET should be contrasted with the exponential control characteristic, ic,vBE,
of the BJT. Obviously, the latter is a much more sensitive relationship, with the result
that iccan vary over a very wide range (five decades or more) within the same BJT. In
the MOSFET, the range of iD achieved in the same device is much more limited. Toappreciate this point further, consider the parabolic relationship between iDand vov, and
recall from our discussion above that vovis usually kept in a narrow range (0.2 V to 0.4
V).
Next we consider the effect of the device dimensions on its current. For the bipolar
transistor the control parameter is the area of the emitter-base junction (EBJ), AEwhich
14
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
15/48
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
16/48
(a) ID= (nCox) (v2ov
Substituting ID= 100A, W/L = 10, and, from data Table,nC0x= 387 A/V2, VT=0.48V
results in
100= x 387 x 10 x V2ov,
Vov= 0.23 V
Thus,
VGS= Vtn+ Vov= 0.48 + 0.23 = 0.71 V
(b)Ic= IS eVBE / Vr
SubstitutingIc= 100 A and, from Table, Is= 6 x 10-18A gives,
VBE= 0.025 ln = 0.76 V
Low-Frequency Small-Signal Models The low-frequency models for the two devices
are very similar except, of course, for the finite base current (finite ) of the BJT, which
gives rise to r in the hybrid model and to the unequal currents in the emitter and
collector in the T models (a < 1). Here it is interesting to note that the low-frequency
small-signal models become identical if one thinks of the MOSFET as a BJT with =
( = 1).
For both devices, the hybrid- model indicates that the open-circuit voltage gainobtained from gate to drain (base to collector) with the source (emitter) grounded is -gmr0.
It follows thatgmr0is the maximum gain available from a single transistor of either type.
This important transistor parameter is given the name intrinsic gainand is denotedA0.
Although not included in the MOSFET low-frequency model shown in Table, the
body effect can have a significant implication for the operation of the MOSFET as an
amplifier. In simple terms, if the body (substrate) is not connected to the source, it can
act as a second gate for the MOSFET. The voltage signal that develops between the body
and the source, vbs, gives rise to a drain current component gmb = vbs, where the body
transconductancegmbis proportional to gm; that is, gmb= gm, where the factor is inthe range of 0.1 to 0.2. We shall take the body effect into account in the study of IC MOS
amplifiers in the succeeding sections. The body effect has no counterpart in the BJT.
The Transconductance For the BJT, the transconductance gmdepends only on the dc
collector currentIc. (Recall that VTis a physical constant =0.025 V at room temperature).
It is interesting to observe that gmdoes not depend on the geometry of the BJT, and its
16
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
17/48
dependence on the EBJ area is only through the effect of the area on the total collector
current Ic- Similarly, the dependence of gm on VBE is only through the fact that VBE
determines the total current in the collector. By contrast, gmof the MOSFET depends on
ID, Vov, and W/L. Therefore, we use three different (but equivalent) formulas to expressgm
of the MOSFET.
The first formula given in Table for the MOSFET's gm is the most directly comparable
with the formula for the BJT. It indicates that for the same operating current, gmof the
MOSFET is much smaller than that of the BJT. This is because Vov/2 is in the range of
0.1 V to 0.2 V, which is four to eight times the corresponding term in the BJT's formula,
namely VT.
The second formula for the MOSFET's gm indicates that for a given device (i.e., given
W/L),gmis proportional to Vov. Thus a higher gmis obtained by operating the MOSFET
at a higher overdrive voltage. However, we should recall the limitations imposed onthe magnitude of Vovby the limited value of VDD. Put differently, the need to obtain a
reasonably high gmconstrains the designer's interest in reducing Vov.
The thirdgmformula shows that for a given transistor (i.e., given W/L), gmis proportional
to . This should be contrasted with the bipolar case, where gmis directly proportional to
IC.
Output Resistance The output resistance for both devices is determined by similar
formulas, with robeing the ratio of VA to the bias current (ID or Ic). Thus, for both
transistors, ro is inversely proportional to the bias current. The difference in nature andmagnitude of VAbetween the two devices has already been discussed.
Intrinsic Gain The intrinsic gain A0 of the BJT is the ratio of VA which is solely a
process parameter (35 V to 130 V), and VT, which is a physical parameter (0.025 V at
room temperature). Thus A0of a BJT is independent of the device junction area and of
the operating current, and its value ranges from 1000 V/V to 5000 V/V. The situation in
the MOSFET ' is very different: Table provides three different (but equivalent) formulas
for expressing the MOSFET's intrinsic gain. The first formula is the one most directly
comparable to that of the BJT. Here, however, we note the following:
1.The quantity in the denominator is Vov/2. which is a design parameter, and althoughit is becoming smaller in designs using short-channel technologies, it is still much
larger than VT.
2.The numerator quantity VAis both process- and device-dependent, and its value has
been steadily decreasing.
17
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
18/48
As a result, the intrinsic gain realized in a single MOSFET amplifier stage fabricated
in a modern short-channel technology is only 20 V/V to 40 V/V, almost two orders of
magnitude lower than that for a BJT.
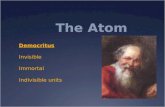
The third formula given for A0 in Table points out a very interesting fact: For a givenprocess technology (VA and n Cax) and a given device (W/L), the intrinsic gain is
inversely proportional to . This is illustrated in Fig below which shows a typical plot
of A0versus the bias current ID. It is clear that the gain increases as the bias current is
lowered. The gain, however, levels off at very low currents. This is because the MOSFET
enters the sub threshold region of operation, where it becomes very much like a BJT with
an exponential current-voltage characteristic. The intrinsic gain then becomes constant,
just as in BJT. Although a higher gain is achieved at lower bias currents, the price paid is
a lowergmand less ability to drive capacitive loads and thus a decrease in bandwidth.
FIGURE2: The intrinsic gain of the MOSFET versus bias current ID. Outside the
subthreshold region, this is a plot of for the Case : nCox= 20 A/
V2. V'A= 20 V/m,L = 2m, and W = 20m
EXAMPLE
It is required to compare the values of gm, input resistance at the gate (base). r0, andA0
for an NMOS transistor fabricated in the 0.25-m technology specified in Table and an
npn transistor fabricated in the low-voltage technology specified in Table. Assume both
devices are operating at a drain (collector) current of 100 A. For the MOSFET, let L=
0.4 m and W = 4 m, and specify the required Vov.
Solution
18
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
19/48
For the NMOS transistor,
High-Frequency Operation The simplified high-frequency equivalent circuits for the
MOSFET and the BJT are very similar, and so are the formulas for determining their
unity-gain frequency (also called transition frequency)fT. Recall thatfTis a measure of
the intrinsicbandwidth of the transistor itself and does not take into account the effectsof capacitive loads. We shall address the issue of capacitive loads shortly. For the time
being, note the striking similarity between the approximate formulas given in Table 6.6
for the value of fT of the two devices. In both cases fT is inversely proportional to the
square of the critical dimension of the device: the channel length for the MOSFET and
the base width for the BJT. These formulas also clearly indicate that shorter-channel
MOSFETs" and narrower-base BJTs are inherently capable of a wider bandwidth of
operation. It is also important to note that while for the BJT the approximate expression
for fT indicates that it is entirely process determined, the corresponding expression
for the MOSFET shows that fT is proportional to the overdrive voltage Vov. Thus we
have conflicting requirements on Vov: While a higher low-frequency gain is achievedby operating at a low Vov, wider bandwidth requires an increase in Vov. Therefore the
selection of a value for Vov involves, among \ other considerations, a trade-off between
gain and bandwidth.
For npn transistors fabricated in the modern low-voltage process, fTis in the range of 10
GHz to 20 GHz as compared to the 400 MHz to 600 MHz obtained with the standard
19
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
20/48
high-voltage process. In the MOS case, NMOS transistors fabricated in a modern
submicron technology, such as the 0.18-m process, achieve fTvalues in the range of 5
GHz to 15 GHz.
Before leaving the subject of high-frequency operation, let's look into the effect of acapacitive load on the bandwidth of the common-source (common-emitter) amplifier. For
this purpose we shall assume that the frequencies of interest are much lower thanfTof the
transistor. Hence we shall not take the transistor capacitances into account. Figure shows
a common-source amplifier with a capacitive load CL. The voltage gain from gate to drain
can be found as follows:
... (4)
Thus the gain has, as expected, a low-frequency value of gmr0 = A0 and a frequency
response of the single-time-constant (STC) low-pass type with a break (pole) frequency
at
Obviously this pole is formed by ro and CL. A sketch of the magnitude of gain versus
frequency is shown in Fig. We observe that the gain crosses the 0-dB line at frequencywt,
20
(5)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
21/48
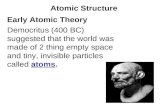
FIGURE3 Frequency response of a CS amplifier loaded with a capacitance CLand fed with an ideal
voltage source. It is assumed that the transistor is operating at frequencies much lower than fT, and
thus the internal capacitances are not taken into account.
Thus
Wt =
That is, the unity-gain frequency or, equivalently, the gain-bandwidth product wt,
is the ratio gmand CL. We thus clearly see that for a given capacitive load CL, a larger
gain-bandwidth product is achieved by operating the MOSFET at a higher gm. Identical
analysis and conclusions apply to the case of the BJT. In each case, bandwidth increases
as bias current is increased.
Design ParametersFor the BJT there are three design parametersIc, VBE, and Is (or,
equivalently, the area of the emitter-base junction)of which any two can be selected
by designer. However, sinceIcis exponentially related to VBEand is very sensitive to the
value of VBE(VBEchanges by only 60 mV for a factor of 10 change in Ic),Icis much more
than VBEas a design parameter. As mentioned earlier, the utility of the EBJ area as a
21
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
22/48
design parameter is rather limited because of the narrow range over whichAEcan vary. It
follows that for the BJT there is only one effective design parameter: the collector current
1c. Finally, note that we have not considered VCEto be a design parameter, since its effect
onIc is only secondary. Of course, VCE affects the output signal swing.
For the MOSFET there are four design parametersID, Vov, L, and Wof which any
three can be selected by the designer. For analog circuit applications the trade-off
in selecting a value for L is between the higher speeds of operation (wider amplifier
bandwidth) obtained at lower values of L and the higher intrinsic gain obtained at larger
values ofL. Usually one selects anL of about 25% to 50% greater than Lmin.
The second design parameter is Vov. We have already made numerous remarks about ,
the effect of the value of Vovon performance. Usually, for submicron technologies, Vovis
selected in the range of 0.2 V to 0.4 V.
Once values for L and Vov are selected, the designer is left with the selection of the
value ofIDor W (or, equivalently, W/L). For a given process and for the selected values
of L and Vov, lD is proportional to W/L. It is important to note that the choice of IDor,
equivalently, of W/L has no bearing on the value of intrinsic gain A0and the transition
frequencyfT. However, it affects the value of gmand hence the gain-bandwidth product.
Figure illustrates this point by showing how the gain of a common-source amplifier
operated at a constant Vov varies with ID (or, equivalently, W/L). Note that while the
dc gain remains unchanged, increasing W/L and, correspondingly, ID increases the
bandwidth, proportionally. This, however, assumes that the load capacitance CL is not
affected by the device size, an assumption that may not be entirely justified in some
cases.
22
Figure4 IncreasingID
or W/Lincreases the bandwidth of a MOSFET amplifier loaded by a constant ca
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
23/48
Combining MOS and Bipolar Transistors-BiCMOS Circuits
It is evident that the BJT has the advantage over the MOSFET of a much higher
transconductance (gm) at the same value of dc bias current. Thus, in addition to realizing
much higher voltage gains per amplifier stage, bipolar transistor amplifiers have superior
high-frequency performance compared to their MOS counterparts.
On the other hand, the practically infinite input resistance at the gate of a MOSFET
makes it possible to design amplifiers with extremely high input resistances and an
almost zero input bias current. Also, the MOSFET provides an excellent implementation
of a switch, a fact that has made CMOS technology capable of realizing a host of analog
circuit functions that are not possible with bipolar transistors.
It can thus be seen that each of the two transistor types has its own distinct and unique
advantages: Bipolar technology has been extremely useful in the design of very-high-
quality general-purpose circuit building blocks, such as op amps. On the other hand,
CMOS, with its very high packing density and its suitability for both digital and analog
circuits, has become the technology of choice for the implementation of very-large-scale
integrated circuits. Nevertheless, the performance of CMOS circuits can be improved if
the designer has available (on the same chip) bipolar transistors that can be employed in
functions that require their highgmand excellent current-driving capability. A technologythat allows the fabrication of high-quality bipolar transistors on the same chip as CMOS
circuits called BiCMOS.
Validity of the Square-Law MOSFET Model
We conclude this section with a comment on the validity of the simple square-law model
we have been using to describe the operation of the MOS transistor. While this simple
model works well for devices with relatively long channels (>1 m) it does not provide
an accurate representation of the operation of short-channel devices. This is because a
number of physical phenomena come into play in these submicron devices, resulting in
what are called short-channel effects. Although the study of short-channel effects is
beyond the scope, it should be mentioned that MOSFET models have been developed
that take these effects into account. However, they are understandably quite complex and
do not lend themselves to hand analysis of the type needed to develop insight into circuit
operation. Rather, these models are suitable for computer simulation and are indeed used
in SPICE. For quick, manual analysis, however, we will continue to use the square-law
23
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
24/48
model which is the basis for the comparison in Table above.
IC BIASING-CURRENT SOURCES, CURRENT MIRRORS & CURRENT-
STEERING CIRCUITS
Biasing in integrated-circuit design is based on the use of constant-current sources. On
an IC chip with a number of amplifier stages, a constant dc current (called a reference
current) is generated at one location and is then replicated at various other locations
for biasing the various amplifier stages through a process known as current steering.
This approach has the advantage that the effort expended on generating a predictable and
stable reference current, usually utilizing a precision resistor external to the chip, need
not be repeated for every amplifier stage. Furthermore, the bias currents of the various
stages track each other in case of changes in power-supply voltage or in temperature.
In this section we study circuit building blocks and techniques employed in the biasdesign of IC amplifiers. These circuits are also utilized as amplifier load elements.
The Basic MOSFET Current Source
Figure 5 shows the circuit of a simple MOS constant-current source. The heart of the
circuit is transistor Q1 the drain of which is shorted to its gate, thereby forcing it to
operate in the saturation mode with
(6)
where channel-length modulation is neglected. The drain current of Q1 is supplied by
VDDthrough resistorR, which in most cases would be outside the IC chip. Since the gate
currents are zero,
.. (7)
where the current throughR is considered to be the reference current of the current source
and is denotedIREF. Equations (6) and (7) can be used to determine the value required for
R.
24
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
25/48
FIGURE 5 Circuit for a basic MOSFET constant-current source.
Now consider transistor Q2: It has the same VGS as Q1; thus, if we assume that it is
operating in saturation, its drain current, which is the output current lo of the current
source, will be
where we have neglected channel-length modulation. the above two equations enable usto relate the output currentIoto the reference current IRFFas follows:
This is a simple and attractive relationship: The special connection of Q1and Q2provides
an output current I0that is related to the reference current IREFby the ratio of the aspect
ratios of the transistors. In other words, the relationship between Io and IREF is solely
determined by the geometries of the transistors. In the special case of identical transistors,
I0=
IREF, and the circuit simply replicates or mirrors the reference current in the output
terminal. This has given the circuit composed of Q1, and Q2the name current mirror, a
name that is used irrespective of the ratio of device dimensions.
25
...(8)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
26/48
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
27/48
increased above this value,I0will increase according to the incremental output resistance
ro2of Q2. This is illustrated in Fig. 7, which shows I0versus V0. Observe that since Q2
is operating at a constant VGS(determined by passing IREF through the matched device
Q1), the curve in Fig. 7 is simply the iD-vDScharacteristic curve of Q2for VGSequal to the
particular value VGS.
In summary, the current source of Fig. 5 and the current mirror of Fig. 6 have a finite
(.13
output resistance R0,
where I0 is given by Eq. (8) and VA2 is the Early voltage of Q2. Also, recall that for
a given process technology, VA is proportional to the transistor channel length; thus,
to obtain high output-resistance values, current sources are usually designed using
transistors with relatively long channels. Finally, note that we can express the current I0
as
27
.(11)
.(12)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
28/48
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
29/48
MOS Current Steering Circuits
Once a constant current is generated, it can be replicated to provide DC bias currents
for the various amplifier stages in the IC. Current mirrors can obviously be used to
implement this current steering function. Figure 8 shows a simple current steeringcircuit.
FIGURE 8 A current-steering circuit.
Here Q1together withR determine the reference current IREF. Transistors Q1, Q2, and Q3
form a two-output current mirror,
To ensure operation in the saturation region, the voltages at the drains of Q2and Q3are
constrained as follows:
VD2,VD3 -VSS+VGS1-Vtn
VD2,VD3 -VSS+Vov1
29
.(13)
.(14)
.(16)
.(15)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
30/48
where Vov1is the overdrive voltage at which Q1, Q2, and Q3are operating. In other words,
the drains of Q2and (Q3will have to remain higher than - V ssby at least the overdrive
voltage, which is usually a few tenths of a volt.
Continuing our discussion of the circuit in Fig. 8, we see that current I3is fed to the input
side of a current mirror formed by PMOS transistors Q4and Qs. This mirror provides
Where I4= I3. To Keep Q5in saturation, its drain voltage should be
where V0V5is the overdrive voltage at which Q5is operating.
Finally, an important point to note is that while Q2pulls its current I2from a load (not
shown in Fig. 8), Q5 pushes its current I5 into a load (not shown in Fig. 8). Thus Q5
is appropriately called a current source, whereas Q2 should more properly be called a
current sink. In an IC, both current sources and current sinks are usually needed.
BJT Circuits
The basic BJT current mirror is shown in Fig. 9. It works in a fashion very similar to that
of the MOS mirror. However, there are two important differences: First, the nonzero base
current of the BJT (or, equivalently, the finite ) causes an error in the current transfer
ratio of the bipolar mirror. Second, the current transfer ratio is determined by the relative
areas of the emitter-base junctions of Q1, and Q2.
Let us first consider the case when is sufficiently high so that we can neglect the base
currents. The reference current IRFF is passed through the diode-connected transistor Q1
and thus establishes a corresponding voltage VBE, which in turn is applied between baseand emitter of Q2.Now, if Q2is matched to Q1or, more specifically, if the EBJ area of Q2
is the same as that of Q1and thus Q2has the same scale currentIsas Q1, then the collector
current of Q2will be equal to that of Q1; that is,
(6.21)
Io= IREF
30
.(17)
. (18)
. (19)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
31/48
For this to happen, however, Q2must be operating in the active mode, which in turn is
achieved so long as the collector voltage V0is 0.3 V or so higher than that of the emitter.
To obtain a current transfer ratio other than unity, say m, we simply arrange that the area
of the EBJ of Q2is m times that of Q1. In this case,
Io= m IREF
Figure 9 : The basic BJT Current mirror
31
. (20)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
32/48
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
33/48
Where VA2 and ro2 are the Early voltage and the output resistance, respectively, of
Q2. Thus even if we neglect the error due to finite , the output current I0 will be at
its nominal value only when Q2has the same VCEas Q1, namely at V0= VBE. As V0 is
increased, I0 will correspondingly increase. Taking both the finite and the finite R0
into account, we can express the output current of a BJT mirror with a nominal current
transfer ratio m as
We may observe, the error term due to the Early effect reduces to zero for V0= VBE.
EXERCISE
Consider a BJT current mirror with a nominal current transfer ratio of unity. Let the
transistors have Is= 10-15A, = 100, and VA= 100 V. For IREF= 1 mA, findI0when V0
= 5V. Also, find the output resistance.
Ans. 1.02 mA: 100 k
A Simple Current Source Just in the same way as MOS, the basic BJT current mirror
can be used to implement a simple current source, as shown in Fig. 11. Here the reference
current is
where VBE is the base-emitter voltage corresponding to the desired value of output
currentI0,
The output resistance of this current source is r0of Q2,
33
. (25)
. (26)
. (27)
. (28)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
34/48
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
35/48
To generate a dc current twice the value of IREF, TWO transistors, Q5 and Q6, each of
which is matched to Q1, are connected in parallel, and the combination forms a mirrorwith Q1. Thus I3= 2IREF.
The parallel combination of Q5 and Q6 is equivalent to a transistor with an EBJ area
double of Q1which is actually done when this circuit is fabricated in IC form.
Q4forms a mirror with Q2; so Q4provides a constant current I2, which equals IREF. If Q3
sources its current to parts of the circuit whose voltage should not exceed Vcc- 0.3V. Q4
sinks its current from parts of the circuit whose voltage should not decrease below, -VEE
+ 0.3 V.
To generate a current three times IREF. Three transistors, Q7, Q8 and Q9 each of which
is matched to Q2, are connected in parallel, and the combination is placed in a mirror
arrangement with Q2. Again, in an IC implementation, Q7, Q8, and Q9 shall be replaced
with a transistor having a EBJ area three times that of Q2.
35
Figure 12: Generation of constant
currents with different magnitudes
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
36/48
GENERAL CONSIDERATIONS IN HIGH FREQUENCY RESPONSE OF
AMPLIFIERS
The amplifier circuits that we shall be going through further are intended for fabrication
using IC technology. Therefore they do not use bypass capacitors. Moreover, the various
stages in an integrated-circuit cascade amplifier are directly coupled; that is, they do not
employ
FIGURE 13 Frequency response of a direct-coupled (dc) amplifier.
large coupling capacitors, such as what we observe in discrete circuits. The frequency
response of these direct-coupled or DC amplifiers have the general form shown in
Fig. 13. It is clear that the gain remains constant at its midband value AMdown to zero
frequency (DC). That is, compared to the capacitively coupled amplifiers that use bypass
capacitors, direct-coupled IC amplifiers do not suffer gain reduction at low frequencies.
However, gain falls off at the high-frequency end due to the internal capacitances of the
transistor. These capacitances represent the charge storage phenomena that take place
inside the transistors and are included in the high-frequency device models.
The High-Frequency Gain Function
The amplifier gain, considering the effect of internal transistor capacitances, can be
expressed as a function of the complex-frequency variables in the general form
A(s) = AMFH(s)
36
. (31)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
37/48
Where AM is the mid-band gain, which is equal to the low-frequency or dc gain. The
value ofAMcan be determined by analysing the amplifier equivalent circuit by neglecting
the effect of the transistor internal capacitancesthat is, considering them to act as open
circuits. When we consider these capacitances, the gain has the factorFH(s), which can
be expressed as shown below, in terms of its poles and zeros,which are usually real
where Pl, P2, . . . , Pnare positive numbers indicating the frequencies of the n real
poles and z1, z2,.... Zn are positive, negative, or infinite numbers indicating the
frequencies of the n real transmission zeros. It is clear that, when sapproaches 0, FH(s)approach unity and the gain approachesAM.
The 3-dB Frequency,fH
The region of the high-frequency band which is close to the midband, is the region
of interest for an amplifier designer. The designer needs to estimateand if need be
modifythe value of the upper 3-dB frequency fH(or H = 2fH). It should be known
that in many cases the zeros are either at infinity or such high frequencies as to be of
little significance to the determination of H. If one of the poles, say Pl, is of much
lower frequency than any of the other poles, then this pole will have the greatest effecton the value of the amplifier H. It means that, this pole (referred as dominant pole) will
dominate the high-frequency response of the amplifier. In those cases the function FH(s)
can be approximated by
which is the transfer function of a first-order (or Single Time Constant) low-pass
network. So, if a dominant pole exists, then the value of H can be written as
37
. (32)
. (33)
. (34)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
38/48
The lowest-frequency pole which is at least two octaves (a factor of 4) away from the
nearest pole or zero can be referred as a dominant pole.
If a dominant pole does not exist, the 3-dB frequency Hcan be determined from a plot
of |FH(j)|. Alternatively, an approximate formula for H can be derived as follows:Consider, for the sake of simplicity, the case of a circuit that has two poles and two zeros
in the high-frequency band; and so,
Substitutings =jand considering the square of magnitude results
By definition, at = H, |FH|2= ; thus,
His usually smaller than the frequencies of all the poles and zeros, we may neglect the
III term in numerator and denominatorand solve for Hto obtain
This relationship can be extended to any number of poles and zeros as
From the above equation we may note that, if one of the poles, say wp1 is dominant, then
Eq.39 reduces to Eq.34.
38
. (35)
. (36)
. (37)
. (38)
. (39)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
39/48
EXAMPLE
The high-frequency response of an amplifier is characterized by the transfer function
Determine the 3-dB frequency approximately and exactly.
Solution The lowest-frequency pole is 104rad/s and is two octaves lower than the second
pole and a decade lower than the zero, we note that a dominant-pole situation almost
exists and H= 104rad/s. An estimate of Hcan be determined using Eq.39, as follows:
The exact value of wHcan be obtained from the given transfer function as 9537 rad/s.,
Fig. 14, represents a Bode and an exact plot for the given transfer function. This is a plot
of the high-frequency response of the amplifier normalized relative to its midband gain.
39
Figure14: Normalized high-
frequency response of the
amplifier in Example.
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
40/48
Open-Circuit Time Constants
It is very clear that if the poles and zeros are known, then any one of the above methods
can be used to find fH. Usually, it is not an easy task to find poles and zeros by hand
analysis. In those cases, the following method is used which gives approximate value of
fH.
The numerator and denominator factors of FH(s) (eq.32) can be multiplied out and FH(s)
can beexpressed in the form as shown below:
the coefficients b and aare related to the frequencies of the poles and zeros, respectively.
The coefficient b1can be written as,
40
. (40)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
41/48
The value of b1 can be obtained by considering the various capacitances in the high-
frequency equivalent circuit one at a time while all other capacitors are set to zero
(replacing them with open circuits) [see Gray and Searle (1969)]
This means, the value of b1 is obtained by adding the individual time constants, called
open-circuit time constants.
A capacitance Ciis considered, we reduce all other capacitances to zero, the input signal
source is set to zero, and we find the resistance Rioas seen by Ci . This process is then
repeated for all other capacitors in the circuit. Therefore, b1is now given by,
[It is assumed that there are n capacitors in the high-frequency equivalent circuit]
The value of b1obtained is exact. The approximation comes into picture when the value
of b1is usedto determine H. If the zeros are not dominant and if one of the poles, say
P1, is dominant, then from Eq. (41), we may write,
Also, the upper cut-off (3-dB) frequency can be approximated as P1, leading to
In the complicated circuits, it will be not known to us whether a dominant pole exists or
not. However, we use the above equation to determine wHwhich gives good results in
most of the cases.
EXAMPLE
41
. (41)
. (42)
. (43)
. (44)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
42/48
Figure 15(a) shows the high-frequency equivalent circuit of a common-source MOSFET
amplifier. The amplifier is fed with a signal generator Vsig having a resistance Rsig.
ResistanceRin is due to the biasing network. Resistance R'L is the parallel equivalent of
the load resistance RL, the drain bias resistance RD, and the FET output resistance r0.
Capacitors Cgs and Cgd are the MOSFET internal capacitances. For Rsig = 100 k, Rin
= 420 k, Cgs= Cgd= 1pF,gm= 4 mA/V, andR'L=3.33 k, find the midband voltage
gain,AM= V0/Vsigand the upper 3-dB frequency,fH.
Solution
The midband voltage gain can be determined by considering the capacitors in the
MOSFET model to be open circuits. This results in the midband equivalent circuit
shown in Fig. 15(b), from which we find
AM=Vo/Vsig= -Rin(gmRL)/(Rin+Rsig) = -10.8 V/V
His foundusing the method of open-circuit time constants. The resistance Rgsas seen
by Cgs is found by setting Cgd =0 and short-circuiting the signal generator Vsig. This
results in the circuit of Fig. 15(c), from which we find that
FIGURE 15 Circuits for Example above (a) MOSFET amplifiers high-frequency equivalent circuit
(b) the equivalent circuit at midband frequencies; (c) circuit for determining the resistance Rgsand
(d) circuit for determining the resistance Rgd.
42
. (i)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
43/48
The open-circuit time constant of Cgsis given by
Tgs= CgsRgs= 1 x 10-12x 80.8 x 103= 80.8 ns
The resistance Rgdas seen by Cgd is found by setting Cgs= 0 and short-circuiting Vsig.
The result is the circuit in Fig. 15(d), to which we apply a test current I x. Writing a node
equation at G gives
Where R' = Rin// Rsig. A node equation at D Provides
Substituting for Vgsfrom Eq. (v) and rearranging terms yields
The open-circuit time constant of Cgdis
The upper 3-dB frequency Hcan now be determined from
43
. (ii)
. (iii)
. (iv)
. (v)
. (vi)
. (vii)
M
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
44/48
The method of open-circuit time constants specifies the circuit designer, which of the
various capacitances is significant in determining the amplifier frequency response.
In the above example we see that Cgdis the dominant capacitance in determining fH. We
also note that, in effect to increase fHeither we use a MOSFET with smaller Cgdor, for
a given MOSFET, we reduce Rgd by using a smallerR' or R'L. IfR' is fixed, then for a
given MOSFET the only way to increase bandwidth is by reducing the load resistance.
Unfortunately, this also decreases the midband gain. This is an example of the usual
trade-off between gain and bandwidth.
Miller's Theorem
Consider the situation in Fig. 16(a), which can be a part of a larger circuit which is not
shown. We observe two isolated circuit nodes, labeled 1 and 2, between which an
impedance Z is connected. Nodes 1 and 2 are also connected to other parts of the circuit,
as indicated by the dashed lines emanating from the two nodes. Furthermore, it is
assumed that the voltage at node 2 is known and is related to that at node 1 by V2=KV1.
In typical situations K is a gain factor that can be +ve or -ve and has a magnitude usually
larger than one.
44
. (viii)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
45/48
FIGURE 16 The Miller equivalent circuit.
Miller's theorem states that impedance Z can be equivalently replaced by twoimpedances: Z1connected between node 1 and ground and Z2connected between node 2
and ground, where
Z1= Z / (1-K)
And
Z2= Z / (1 - )
to obtain the equivalent circuit shown in Fig. 16(b).
Proof of Miller's theorem can be given by deriving Eq. (45 &46) as follows:
In the original circuit of Fig. 16(a), from node-1 impedance Z carries the current I.
Therefore, to keep this current unchanged in the equivalent circuit, we must choose the
value ofZ1so that it draws an equal current.
I1= =
which yields the value of Z1 in Eq. (45). Similarly, to keep the current into node 2
unchanged, we must choose the value of Z2so that,
45
(45)
(46)
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
46/48
,
which yields the expression for Z2in Eq. (46). The Miller equivalent circuit obtained is
based on the fact that the rest of the circuit remains unchanged. If not, the ratio of V2to
V1might change.
It should be known that the Miller equivalent circuit cannotbe used directly to determine
the output resistance of an amplifier. This is because in determining output resistances it
is implicitly assumed that the source signal is reduced to zero and that a test-signal source
is applied to the output terminalsleading to a major change in the circuit, which results
Millers equivalent circuit to be invalid.
Example: Figure 17(a) shows an ideal voltage amplifier having a gain of -100 V/V
with an impedance Z connected between its output and input terminals. Find the Miller
equivalent circuit when Z is (a) a l-M resistance, and (b) a 1-pF capacitance. Use the
equivalent circuit to find Vo/Vsig
Solution
(a) For Z = 1 M, using Miller's theorem which leads to the equivalent circuit in Fig.
17(b), where
46
Figure 17: Circuits for Exa
above
= -kV1/ [-k z/(1-k)]
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
47/48
The voltage gain is given by:
(b) For Z, as a 1-pF capacitancethat is, Z =1/sC = 1/s x 1 x 10-12Miller's theorem
allows us to replace Z by Z1and Z2where
It is clear that Z1is a capacitance of value 101C = 101 pF and Z2is a capacitance 1.01 C
= 1.01 pF. The equivalent circuit is shown in Fig. 17(c), from which the voltage gain can
be found as follows:
The transfer function of a first-order low-pass circuit with a dc gain of -100 and a cut-off
frequency,f3dB
47
8/13/2019 The 8051 Microcontoller mahmudou Unit2-PT
48/48
we see that the replacement of a feedback or bridging resistance results, for a negative K,
in a smaller resistance [divided by a factor (1 - K)] at the input. If the feedback element
is a capacitance, its value is multiplied by (1- K) to result in a equivalent capacitance at
the input side. The multiplication of a feedback capacitance by (1 - K) is referred to as
Millers multiplication or Millers effect.
Drawn from Microelectronics by sedra and smith, 5thedition.