







Languages
Pages
Legal

265
STEM Challenge Programming Guide (LabVIEW™ for LEGO® MINDSTORMS®)
Introduction:
Inthisguide,theRangerBotwillbeprogrammedtofollowaline,pickupanobject,moveuntilitdetectsawall,andthenturnawayfromit.ThisguideisforusewiththeLabVIEW™forLEGO®MINDSTORMS®programminglanguage.
Review:
•ToreviewthebasicprinciplesofconnectingtotheNXTBrickandconfiguringLabVIEWforLEGOMINDSTORMSforusewithvarioussensorsandmotors,reviewtheProgrammingGuidesandTutorialVideosfromLessons2and3.
•ToreviewthebasicprinciplesofprogramminginLabVIEWforLEGOMINDSTORMS,reviewtheProgrammingGuidesandTutorialVideosfromLineFollowerProgrammingExtension.
•ThesematerialscontaindetailedinformationabouthowtousetheSchematicEditorandhowtocreatethestructures,functions,constants,andwiresthatarepresentedinthisguide.
•Thisprogrammakesuseofthe Screen Update SubVI,providedontheTETRIX®GettingStartedGuideDVD.ThisfunctionusestheNXTtodisplaycustomtextaswellaslightandultrasonicsensorreadings.
•Usethesestepstoaddthefunctiontotheprogram:
a.Withintheblockdiagram,right-clicktobringupthefunctionspaletteandchooseSelect a VI.
b.ThennavigatetowheretheScreen Update SubVIissaved.
Note:IftheScreenUpdateSubVIhasnotbeensavedonthecomputerinaspecificlocationalready,downloaditfromtheDVDbynavigatingtotheResourcestabandselectingtheScreen Update SubVI Program (LabVIEW for LEGO MINDSTORMS)button.
c.OncetheScreenUpdateSubVIhasbeenlocated,openitandplaceitontheblockdiagram.
Getting Started:
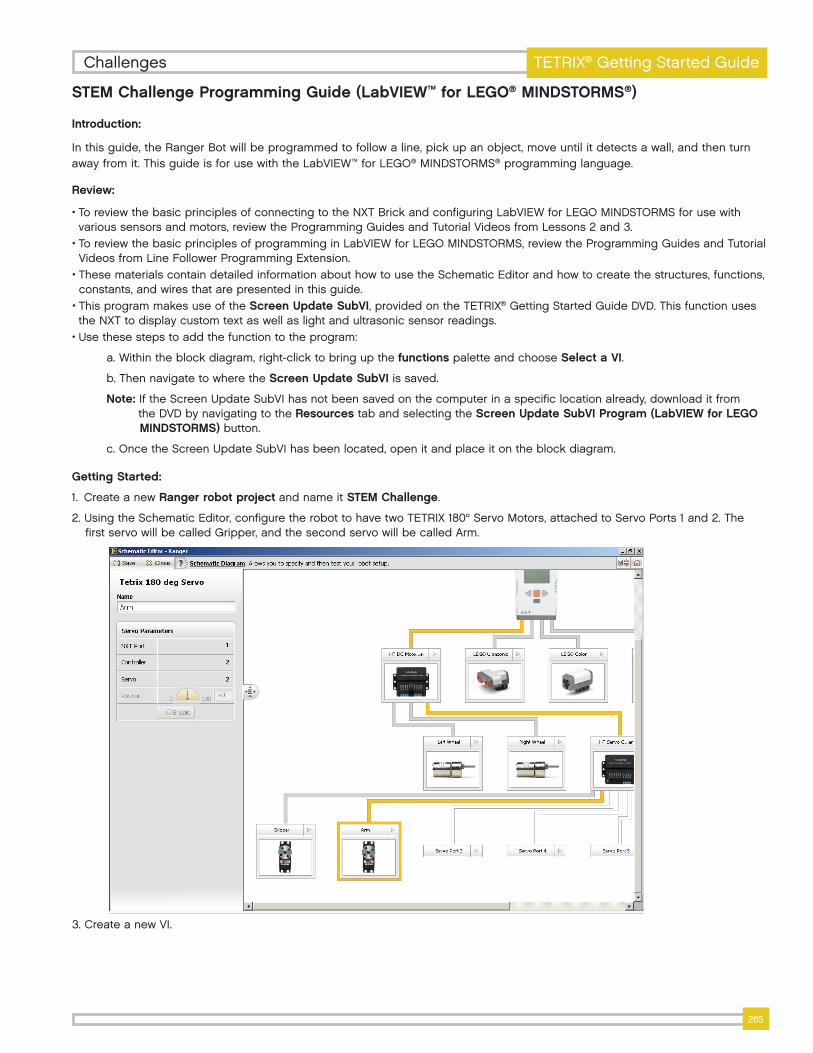
1.CreateanewRanger robot projectandnameit STEM Challenge.
2.UsingtheSchematicEditor,configuretherobottohavetwoTETRIX180°ServoMotors,attachedtoServoPorts1and2.ThefirstservowillbecalledGripper,andthesecondservowillbecalledArm.
3.CreateanewVI.
TETRIX®GettingStartedGuideChallenges
266
STEM Challenge Programming Guide (LabVIEW™ for LEGO® MINDSTORMS®)
Initialize the Servos:
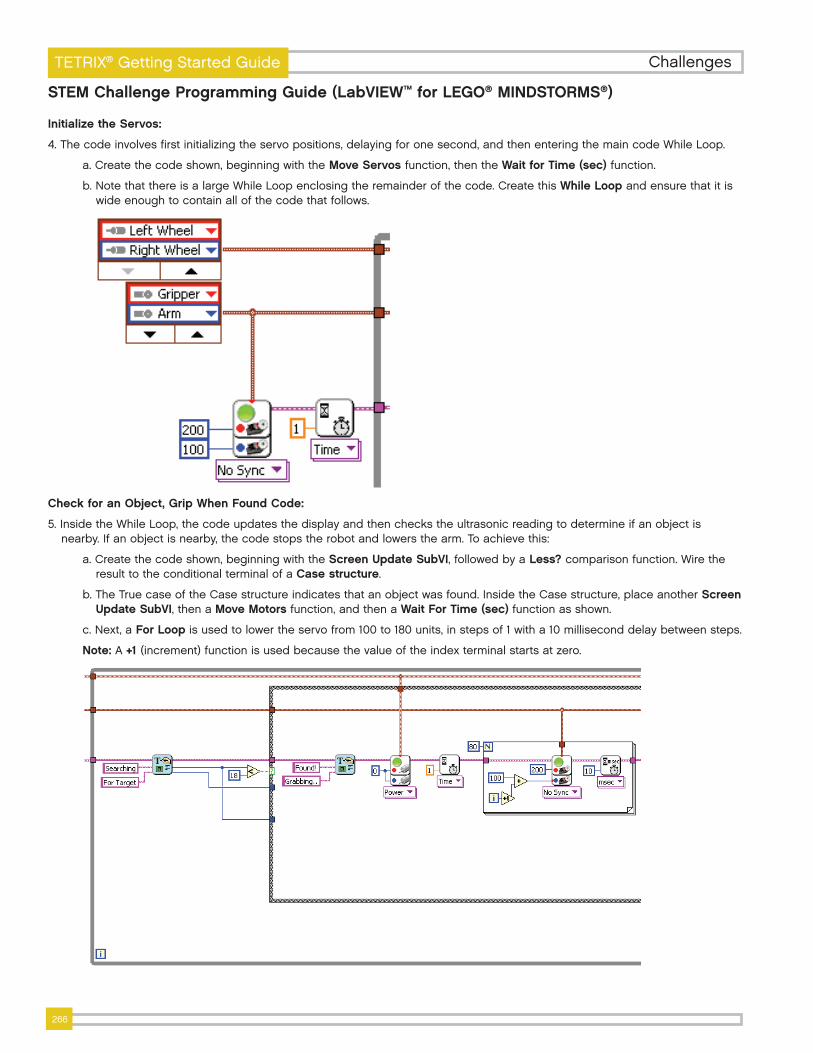
4.Thecodeinvolvesfirstinitializingtheservopositions,delayingforonesecond,andthenenteringthemaincodeWhileLoop.
a.Createthecodeshown,beginningwiththe Move Servos function,thentheWait for Time (sec) function.
b.NotethatthereisalargeWhileLoopenclosingtheremainderofthecode.CreatethisWhile Loop andensurethatitiswideenoughtocontainallofthecodethatfollows.
Check for an Object, Grip When Found Code:
5.InsidetheWhileLoop,thecodeupdatesthedisplayandthencheckstheultrasonicreadingtodetermineifanobjectisnearby.Ifanobjectisnearby,thecodestopstherobotandlowersthearm.Toachievethis:
a.Createthecodeshown,beginningwiththeScreen Update SubVI,followedbya Less? comparisonfunction.WiretheresulttotheconditionalterminalofaCase structure.
b.TheTruecaseoftheCasestructureindicatesthatanobjectwasfound.InsidetheCasestructure,placeanotherScreen Update SubVI,thenaMove Motorsfunction,andthenaWait For Time (sec)functionasshown.
c.Next,a For Loopisusedtolowertheservofrom100to180units,instepsof1witha10milliseconddelaybetweensteps.
Note:A+1(increment)functionisusedbecausethevalueoftheindexterminalstartsatzero.
ChallengesTETRIX®GettingStartedGuide
267
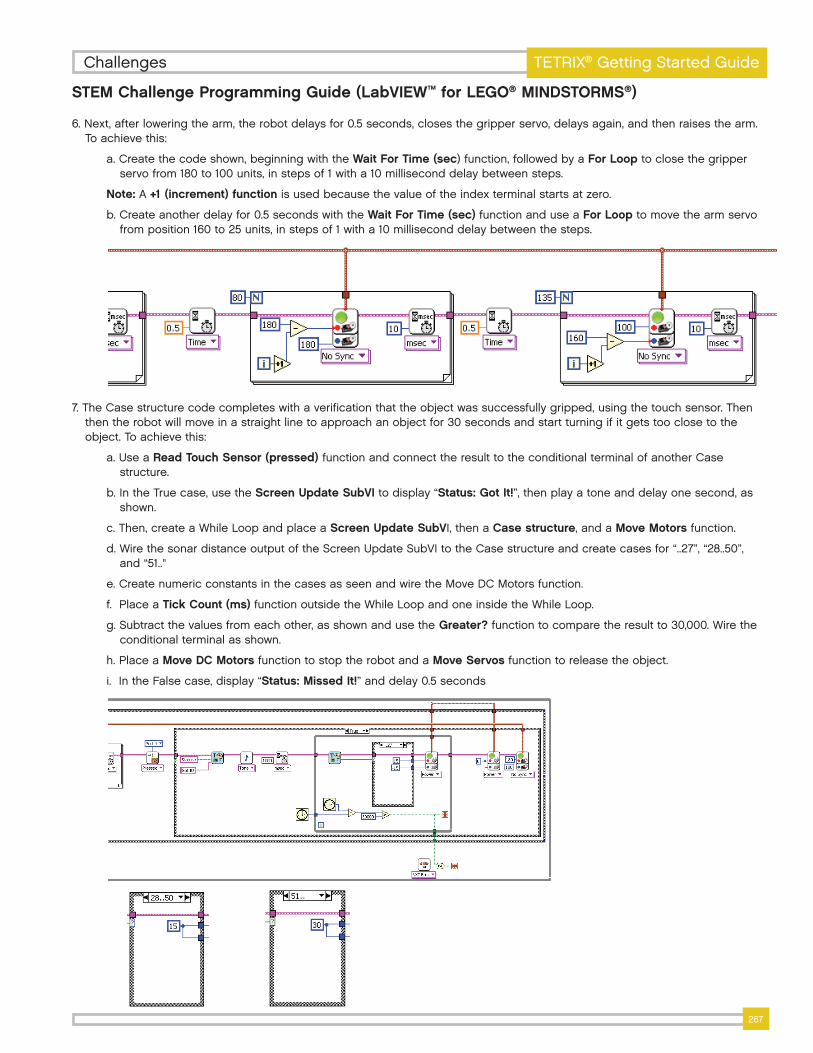
6.Next,afterloweringthearm,therobotdelaysfor0.5seconds,closesthegripperservo,delaysagain,andthenraisesthearm.Toachievethis:
a.Createthecodeshown,beginningwiththeWait For Time (sec)function,followedbyaFor Looptoclosethegripperservofrom180to100units,instepsof1witha10milliseconddelaybetweensteps.
Note:A+1 (increment) functionisusedbecausethevalueoftheindexterminalstartsatzero.
b.Createanotherdelayfor0.5secondswiththeWait For Time (sec)functionanduseaFor Looptomovethearmservofromposition160to25units,instepsof1witha10milliseconddelaybetweenthesteps.
7.TheCasestructurecodecompleteswithaverificationthattheobjectwassuccessfullygripped,usingthetouchsensor.Thenthentherobotwillmoveinastraightlinetoapproachanobjectfor30secondsandstartturningifitgetstooclosetotheobject.Toachievethis:
a.UseaRead Touch Sensor (pressed) functionandconnecttheresulttotheconditionalterminalofanotherCasestructure.
b.IntheTruecase,usetheScreen Update SubVItodisplay“Status: Got It!”,thenplayatoneanddelayonesecond,asshown.
c.Then,createaWhileLoopandplaceaScreen Update SubVI,thenaCase structure,andaMove Motorsfunction.
d.WirethesonardistanceoutputoftheScreenUpdateSubVItotheCasestructureandcreatecasesfor“..27”,“28..50”,and“51.."
e.CreatenumericconstantsinthecasesasseenandwiretheMoveDCMotorsfunction.
f.PlaceaTick Count (ms)functionoutsidetheWhileLoopandoneinsidetheWhileLoop.
g.Subtractthevaluesfromeachother,asshownandusethe Greater?functiontocomparetheresultto30,000.Wiretheconditionalterminalasshown.
h.PlaceaMove DC MotorsfunctiontostoptherobotandaMove Servosfunctiontoreleasetheobject.
i.IntheFalsecase,display“Status: Missed It!”anddelay0.5seconds
STEM Challenge Programming Guide (LabVIEW™ for LEGO® MINDSTORMS®)
TETRIX®GettingStartedGuideChallenges
268
STEM Challenge Programming Guide (LabVIEW™ for LEGO® MINDSTORMS®)
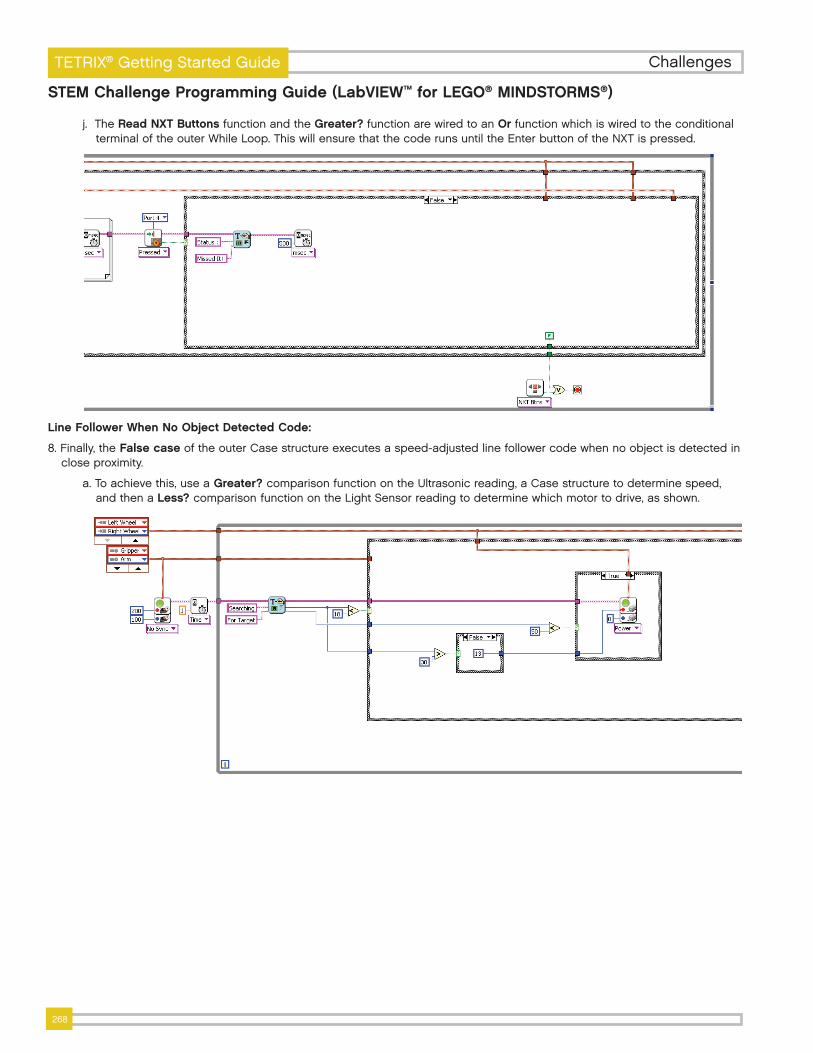
j.TheRead NXT ButtonsfunctionandtheGreater?functionarewiredtoanOrfunctionwhichiswiredtotheconditionalterminaloftheouterWhileLoop.ThiswillensurethatthecoderunsuntiltheEnterbuttonoftheNXTispressed.
Line Follower When No Object Detected Code:
8.Finally,the False caseoftheouterCasestructureexecutesaspeed-adjustedlinefollowercodewhennoobjectisdetectedincloseproximity.
a.Toachievethis,usea Greater? comparisonfunctionontheUltrasonicreading,aCasestructuretodeterminespeed,andthenaLess? comparison functionontheLightSensorreadingtodeterminewhichmotortodrive,asshown.
ChallengesTETRIX®GettingStartedGuide
Top Related