






Languages
Pages
Legal


SE207 Modeling and SimulationUnit 4
Standard Forms for System Models
Dr. Samir Al-AmerTerm 072
SE207 Modeling and SimulationUnit 4
Lesson 1: State Variable Models
Dr. Samir Al-AmerTerm 072
Read Section 3.1

Outlines Two standard forms for models will be used.
State variable modelInput-output model
States (state Variables) For each dynamical system, there exist a set of variables (states) such that if the values of the states are known an any reference time t0 and if the input is known for t ≥ t0 then the output and the states can be determined for t ≥ t0
States (State Variables) States are not unique.The value of states summarize effect of past inputs on the system.Usually the number of states is equal to the number of energy storing elements ( Masses and springs)In some cases we may have redundant states (the number of states is less than the number of energy storing elements)

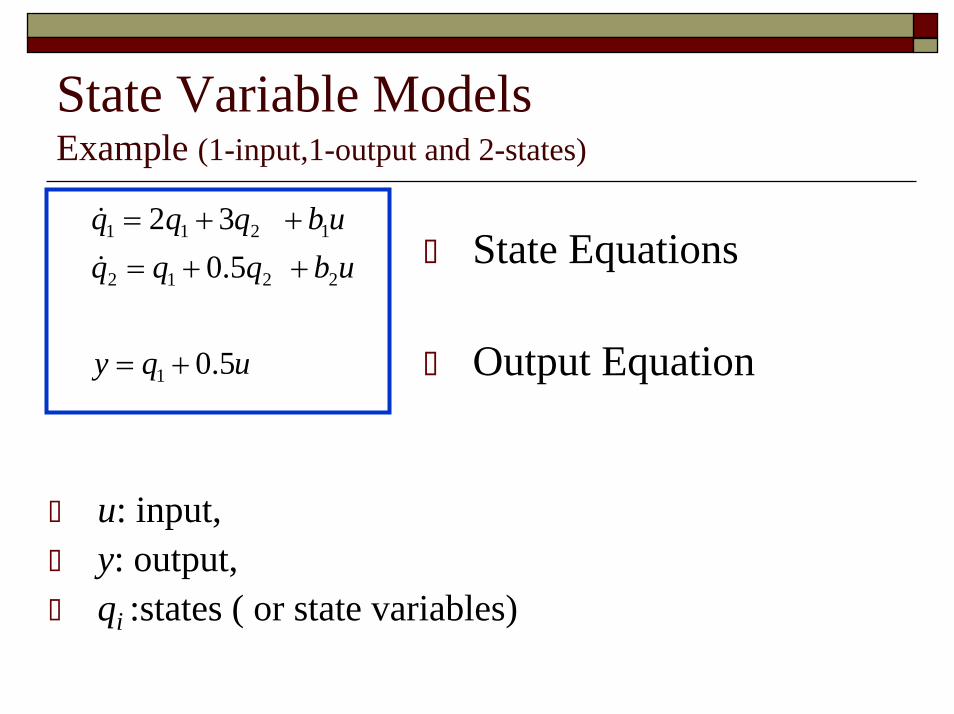
State Variable Models Example (1-input,1-output and 2-states)
uqy
ubqqqubqqq
5.0
5.032
1
2212
1211
+=
++=++=
&
&State Equations
Output Equation
u: input, y: output, qi :states ( or state variables)
State Variable Models
2221213232221212
2121113132121111
2321313332321313
2221213232221212
2121113132121111
ududqcqcqcyududqcqcqcy
ububqaqaqaqububqaqaqaq
ububqaqaqaq
++++=++++=
++++=++++=++++=
&
&
& State Equations
Output Equations
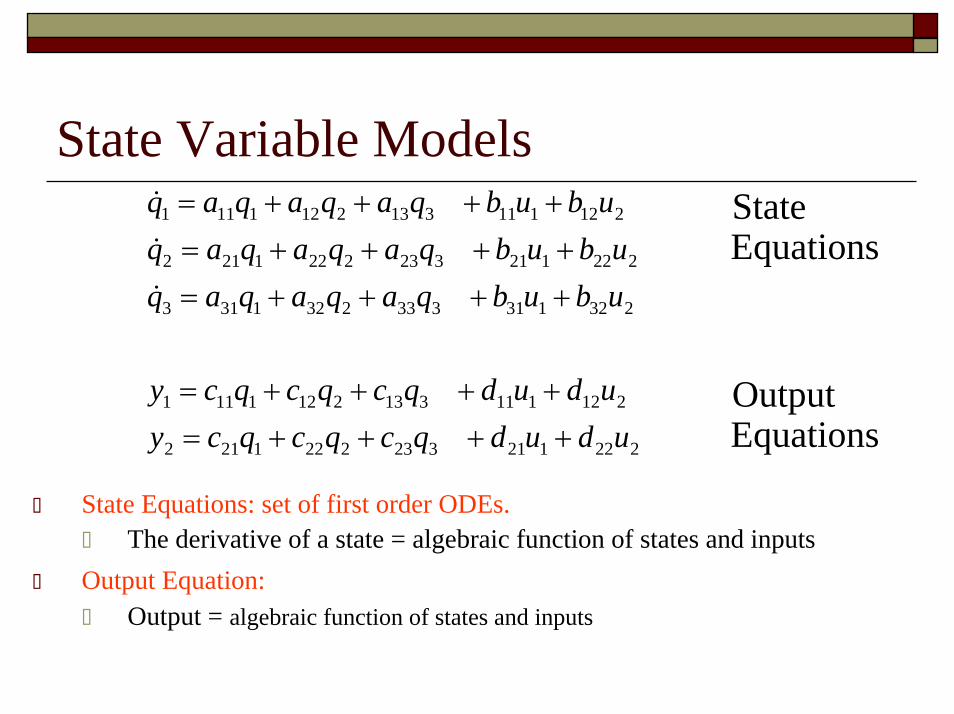
State Equations: set of first order ODEs.The derivative of a state = algebraic function of states and inputs
Output Equation:Output = algebraic function of states and inputs

Typical Choice of the States Typical choice of states for translational Mechanical
systems
the number of states is equal to the number of energy storing elements ( Masses and springs)Some times we have less than that numberSelect velocity of a mass as a stateSelect elongation of a spring as a stateStates are not unique.

Example 1
M
xInput: fa(t)Outputs :
• Tensile force in spring
• Velocity of mass
• Acceleration of mass
fa(t)K
B
# of states = 2
Velocity of mass v
Elongation of spring x ( other choices are possible)

Example
)(tfvMvBxK
vMfvBfxKf
a
I
B
k
=++
===
&
&
M
x
Kfa(t)
B
[ ])(1
:
tfKxBvM
v
vxEquationsState
a+−−=
=
&
&
)(1
:
3
2
1
tfM
xMKv
MBy
vykxy
EquationOutput
a+−
−−
=
==

Example State Variable Model
[ ])(1 tfKxBvM
v
vx
a+−−=
=
&
&
)(13
2
1
tfM
xMKv
MBy
vykxy
a+−−
=
==
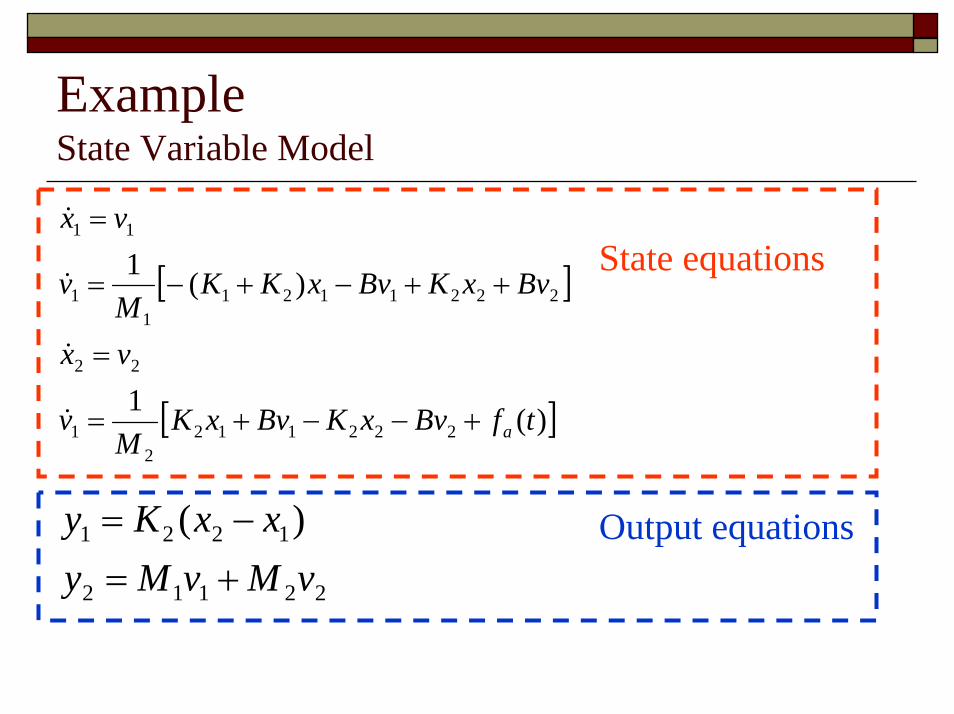
State equations
Output equations

Example 2
M1
x1
M2
x2
K2 fa(t)K1
B
Input: fa(t)
Outputs: Tensile force in spring 2
Total momentum of the masses

Example 2
M1
x1
M2
x2
K2 fa(t)K1
B
# of States = # of energy storing elements =4 ( 2 springs & 2 masses)
One possible choice of states : x1,x2,v1,v2
Elongation of spring 1= x1; Elongation of spring 2= x2-x1
Velocity of mass 1 =v1; Velocity of mass 2 =v2;

Example 2Draw freebody diagrams
M1
2
2
1
1
I
B
k
I
k
fff
ff
)(
2
tf
ff
a
B
k
M2

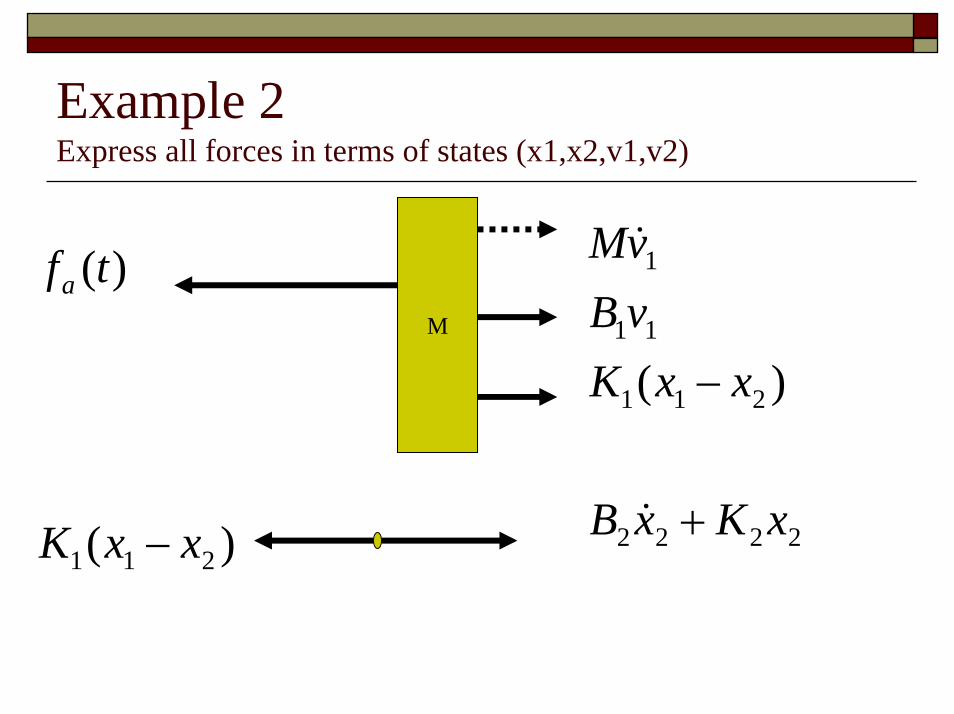
Example 2Express all forces in terms of states (x1,x2,v1,v2)
222
12
1222
111
111
)()(
vMfvvBf
xxKf
vMfxKf
I
B
k
I
k
&
&
=−=−=
==
M1
M2 )(
)()(
12
1222
tf
vvBfxxKf
a
B
k
−=−=
Example State Variable Model
[ ]
[ ])(1
)(1
2221122
1
22
22211211
1
11
tfBvxKBvxKM
v
vx
BvxKBvxKKM
v
vx
a+−−+=
=
++−+−=
=
&
&
&
&
22112
1221 )(vMvMy
xxKy+=−=
State equations
Output equations

Example 2Alternative choice of states
M1
x1
M2
x2
K2 fa(t)K1
B
# of States = # of energy storing elements =4 ( 2 springs & 2 masses)
Alternative choice One possible choice of states : x1,xr=x2-x1 ,v1,vr=v2-v1
Elongation of spring 1= x1; Elongation of spring 2= xr
Velocity of mass 1 =v1; Velocity of mass 2 =vr+v1;

Example 2Express all forces in terms of states (x1,x2,v1,v2)
)( 222
22
111
111
RI
RB
Rk
I
k
vvMfBvf
xKf
vMfxKf
&&
&
+===
==
M1
M2 )(
22
tf
BvfxKf
a
RB
Rk
==

Example State Variable Model
[ ]
[ ])()()(1
1
12121212121
2111
1
11
tfMvMMBxMMKxMKMM
v
vx
BvxKxKM
v
vx
aRRR
RR
RR
++−+−=
=
++−=
=
&
&
&
&
R
R
vMvMMyxKy
21212
21
)( ++==
State equations
Output equations

Example 2Two possible state variable models for the system
M1
x1
M2
x2
K2 fa(t)K1
B
Two state variable models were obtained for the same system
They are different but they represent the same relationship between inputs and outputs.

Example 3
M
x1
fa(t)
x2
K2K1
B1 B2
Input fa(t)
Output : displacement of the mass-less junction
Example 2Express all forces in terms of states (x1,x2,v1,v2)
M
2222
211
11
1
)(
xKxB
xxKvBvM
+
−
&
&
)(
)(
211 xxK
tfa
−

Example State Variable Model
[ ]
[ ]2122112
2
2111111
11
1
)(1
xKxKxKB
x
tfxKvBxKM
v
vx
a
−−=
++−−=
=
&
&
&
21 xy =
State equations
Output equations
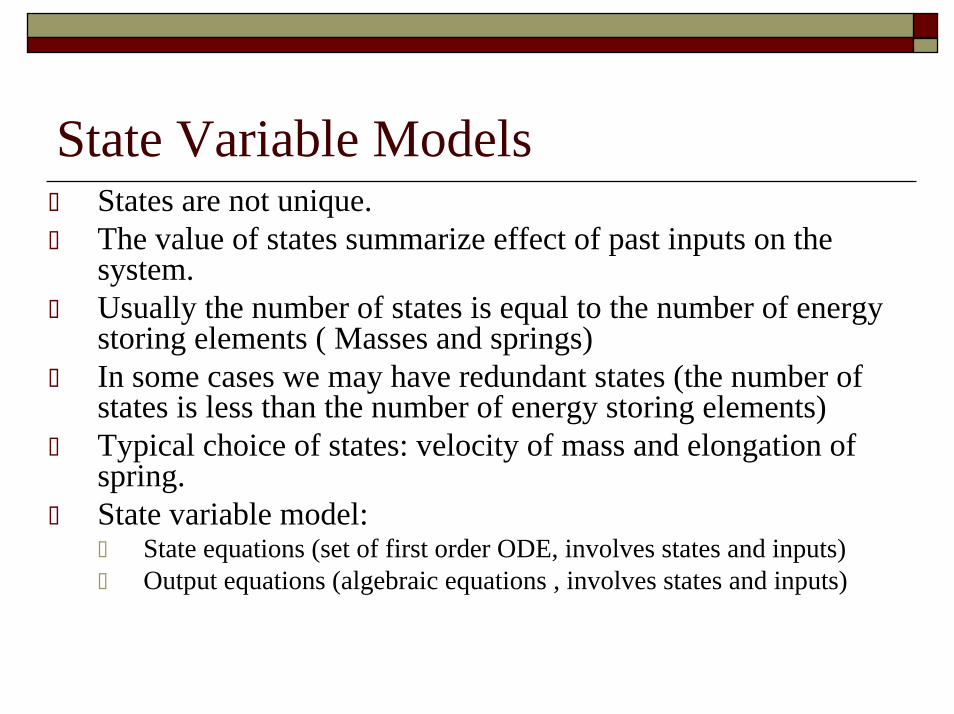
State Variable Models States are not unique.The value of states summarize effect of past inputs on the system.Usually the number of states is equal to the number of energy storing elements ( Masses and springs)In some cases we may have redundant states (the number of states is less than the number of energy storing elements)Typical choice of states: velocity of mass and elongation of spring.State variable model:
State equations (set of first order ODE, involves states and inputs)Output equations (algebraic equations , involves states and inputs)

SE207 Modeling and SimulationUnit 4
Lesson 2: Input-Output (I/O) Models
Dr. Samir Al-AmerTerm 072
Read Section 3.2
Outlines Two standard forms for models will be used.
State variable modelInput-output model

States (State Variables) States are not unique.The value of states summarize effect of past inputs on the system.Usually the number of states is equal to the number of energy storing elements ( Masses and springs)In some cases we may have redundant states (the number of states is less than the number of energy storing elements)
State Variable Models Example (1-input,1-output and 2-states)
uqy
ubqqqubqqq
5.0
5.032
1
2212
1211
+=
++=++=
&
&State Equations
Output Equation
u: input, y: output, qi :states ( or state variables)
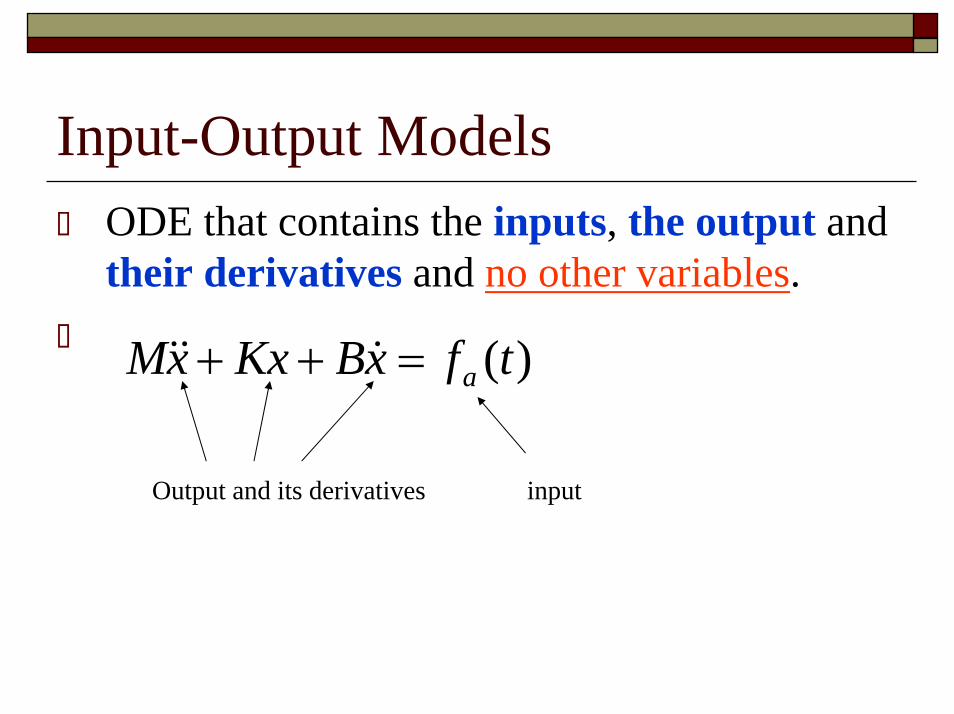
Input-Output ModelsODE that contains the inputs, the output and their derivatives and no other variables.
)(tfxBKxxM a=++ &&&
Output and its derivatives input

State Variable and Input-output Models
State Variable Model input-output model
M
x Input: fa(t)Output : displacement xK
fa(t)
B
[ ]xy
tfKxBvM
v
vx
a
=
+−−=
=
)(1&
&
)(tfxBKxxM a=++ &&&

Example Input-Output Models
[ ])(1 tfKxBvM
v
vx
a+−−=
=
&
&
xy =1
State variable model
Input-Output Model
)(tfxBKxxM a=++ &&&
Example Input-Output ModelsFor simple problems, you may be able to obtain the I/O model directly by expressing all forces (in the free body diagram) in terms of inputs, outputs and their derivatives.

Input-Output Models
22
1
2121122
2111111
,Eliminate:
)(:
0)()(
xxxoutput
tfinput
xKxKKxBtfxKxKxBxM
a
a
&
&
&&&
=−++=−++

Input-Output Models
( )
( )
( ) ( )aa
a
a
a
fKKfBxKK
xBKBKKBxMKMKBBxMBxandx
tfxKxBxMK
xxatedifferenti
tfxKxBxMK
xxforsolve
xKxKKxBtfxKxKxBxM
)(
modeloutputinputgettosimplifyandsubsitute
)(1
)(1
0)()(
212121
11211121212112
22
111111
22
111111
22
2121122
2111111
++=+
++++++−
−++⎟⎟⎠
⎞⎜⎜⎝
⎛=⇒
−++⎟⎟⎠
⎞⎜⎜⎝
⎛=⇒
=−++=−++
&
&&&&&&
&
&&&&&&&&
&&&
&
&&&

Input-Output Models( ) ( )
aa fKKfBxKK
xBKBKKBxMKMKBBxMB
)( 212121
11211121212112
++=+
++++++&
&&&&&&
ablesother vari no and), ( sderivative its andoutput theand
),,,( sderivative its andinput theinvolvesequation This 1111
aa ff
xxxx&
&&&&&&

Reduction using differentiator operator
( )
aa
a
fxpporfxpxxp
tfxxx
xdtdx
dtxdxpp
xdtdx pandx
dtdpx
=++=++
=++
++++
)532(532
)(532ooperator t p Apply the
42 means42
means means
operatorator differenti :p Define
22111
2
22
2
22
&&&

Reduction using differentiator operator
a
a
fxpxxp
tfxxx
=++
⇓
=++
532
)(532
.manipulate easier to arehich operator w p in the equations algebraic into equations aldifferenti
theconvertsoperator ator differenti The
2
111 &&&

Input-Output Models
( ))()(
00)(
)(
:),(:0)(
)(
2111112
112112
2121122
21111112
1
2121122
2111111
tfxKxKpBxMpM
xKxKKpBxKxKKxpB
tfxKxKpxBxMp
xoutputtfinputxKxKKxB
tfxKxKxBxM
a
a
a
a
=−++⇒
=−++⇒=−++=−++
=−++=−++
&
&&&
Input-Output Models
only sderivative their and , containsequation final The, Remove
:),(:0)(
)(
1
22
1
2121122
2111111
xfxx
xoutputtfinputxKxKKxB
tfxKxKxBxM
a
a
a
&
&
&&&
=−++=−++

Input-Output Models
( )( )
( ) ( )( )
( )( )( ) )(
)(
)()(
, eliminate To
112
1111112
112
112112
112
2111211112
112
112
112112
22
tfKKpBxKxKpBxMpKKpBM
xKbyxKKpBreplaceNowtfKKpB
xKKKpBxKpBxMpMKKpB
KKpBbysidesbothmuliplyxKxKKpB
xx
a
a
++=−++++
++++=
++−++++
++=++
&

Input-Output Models
( )( )
aa fKKfB
xKKxBKBKKBxMKMKBBxMB
dtd
)(
simplifyandby operator p Replace
212
1211121112
1212112
++=
+++++++
&
&
&&&&&

State space versus input/output modelsThe order of the I/O model = number of states (unless some states are redundant
or some states have no effect on output)State variable models are more convenient for solution and for modeling MIMO (multi-input-multi-output) systems
Top Related