







Languages
Pages
Legal


8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 1/9
Pe r g a mo nConwoiEn&.Practice,VoL 2 No. 2 pp. 201-209 1994
C o ~ © l ~ 4 1 ~ S c ie ~ L ~P d ~ d i a O n ~ B d u ~ A l l ~ n ~ w ~ d
0967.0~I/94 (~00 + 0.00
R O B U S T O N L IN E D I F F E R E N T I A T I O N T E C H N I Q U E S W I T H
A N A P P L I C A T I O N T O U N D E R G R O U N D C O A L M I N I N G 1
S . C r i s a f u l l l , 2 a n d T . P . M e d h u r s t
*Cooperative Research C entre for Rob ust and Adaptive Systems, Australian National U niversity,
Canberra, ACT 0200, Australia
**CSlRO Di¢is ion of F.xploration and M ining, P.O . Box 883, Kenmore, Q LD 4069, Austral ia
A b s t r a c t : I n t h i s p a p e r a n a l g o r i t h m f o r r o b u s t o n - li n e r a t e e s t i ma t i o n o f n o i s y
d i g i t a l s i g n a l s i s d e v e l o p e d . T h e a l g o r i t h m i s b a s e d o n K a l ma n f i l t e r i n g t e c h n i q u e s
a n d c o n s e q u e n t l y h a s t h e c a p a b i l i t y o f c o p i n g w i t h n o i s e a n d s i g n al d i s c o n ti n u i ti e s .T h i s a l g o r i t h m i s t h e n s u c c e s s f u l ly a p p l i e d t o h y d r a u l i c le g p r e s s u r e d a t a o b t a i n e d
f r o m m o b i le m e c h a n i s e d r o o f s u p p o r t s ( b r e a k e r li ne s u p p o r t s ) i n a n u n d e r g r o u n d c o a l
mi n e . T h e d a t a i s c o l l e c t e d b y a mo n i t o r i n g s y s t e m ( B L Sm o n ) w h i c h al lo w s r e a l - t i me
d a t a p r o c e s s i n g t o a i d i n d e t e r m i n i n g t h e o n s e t o f r o o f c a v i n g e v e n t s .
K e y w o r d s : d i g it a l di f fe r e n ti a ti o n , r a te e s t i m a t i o n , u n d e r g r o u n d c o a l m i n i ng i n s ta -
b i l i t y , Kalman f i l t e r ing
1 . I N T R O D U C T I O N
T h e A u s t r a l i a n C o m m o n w e a l t h S c ie n ti fi c a n d I n -d u s t r i a l R e s e a r c h O r g a n i s a t i o n ( C S I R O ) h a s r e -
c e n t l y i n i t i a t e d a p r o g r a m f o r t h e A u s t r a l i a n u n -
d e r g r o u n d c o a l m i n i n g i n d u s t r y t o u t i l i s e a u t o -
m a t e d c o m p u t e r c o n t r o l l e d i n s t r u m e n t a t i o n f o r
g e o me c h a n i c a l a p p l i c a t i o n s ( Fo U i n g t o n a n d Me d -
b u r s t , 1 9 92 ) . T h e p r i m a r y f o c u s o f t h i s p r o g r a m
i s t o c o n d u c t r e s e a r c h i n t o t h e e n g i n e e r i n g r e -
s p o n s e o f t h e r o c k ma s s t o mi n i n g a c t i v i t i e s b y
e m p l o y i n g k e y m e a s u r e m e n t a n d a n a l y s i s s t r a t e -
gies.
A s t u d y o f r o o f a n d p i l l a r s t a b i l it y i n u n d e r -
g r o u n d c o a l m i n e s w a s u n d e r t a k e n a s p a r t o f th i s
p r o g r a m ( Fo l l i n g t o n e t aL 1 9 9 2 ) . I n c o n j u n c t i o n
w i t h t h i s , a b r e a k e r l i n e s u p p o r t mo n i t o r i n g s y s -
t e m ( B L S m o n ) w a s a l s o d e v e l o p e d ( H u t c h i n s o n
a n d M e d h u r s t , 1 9 92 ). T h e B L S m o n re c o r d s h y -
d r a u l i c l e g p r e s s u r e s a n d c a n o p y p o s i t i o n o f t h e
m e c h a n i s e d r o o f s u p p o r t s ( b r e a k e r li ne s u p p o r t s
( BL S) ) a n d r e l a y s t h i s i n f o r ma t i o n t o t h e s u r f a c e
i n r e a l t i me . A t t h e s u r f a c e , t h e i n f o r ma t i o n i sc o l l e c t e d b y a l a p t o p c o m p u t e r , t h u s p r o v i d i n g
IA n ear l ier vers ion o f th is paper was presented a t the
IFAC W orld Congress, Sydney, Australia, July 19932T h e a u t h o r w i s h e s t o a c k n o w l e d g e t h e f u n d i n g o f t h e
act iv i t ie s o f the Coo perat iv e P~esearch Centre for Rob ust
a n d A d a p t i v e Systems by t h e A u s t r a l i a n G o v e r n m e n t u n -
d e r t h e C o o p e r a t i v e R e s e a r c h C e n t r e s Program
v a l u a b l e i n f o r ma t i o n f o r o b s e r v a t i o n a n d a n a l y -
sis.
Re cen t s tud ies (M alek i , 1990 ; Fo l l ing ton e t a l .
1992) have iden t i f i ed a poss ib le s igna tu re o f the
o n s e t o f i n s t a b i l i ty i n u n d e r g r o u n d c o a l m i n e s.
U n d e r f a v o u r a b l e mi n i n g c o n d i t i o n s , t h e r a t e o f
c h a n g e o f l e g l o a d i n g w a s n e g a t i v e t h r o u g h o u t
m o s t o f t h e d u r a t i o n o f a n i n d i v i d u a l c u t t i n g c y -
c le o r l if t. H o w e v e r , w h e n t h e m i n i n g c o n d i t i o n s
w e r e u n f a v o u r a b l e , e g. a n u n s t a b l e r o o f , n e g a t i v e
r a t e s o f c h a n g e o f p r e s s u r e w e r e r e d u c e d t h r o u g h -
o u t t h e li ft in b o t h d u r a t i o n a n d m a g n i t u d e , a n d
p o s i t iv e r a t e s o f c h a n g e w e r e mu c h g r e a t e r . T h u s
on- l ine ca l cu la t ion o f leg load ing ra t es w as per -
c e i v e d t o b e v a l u a b l e i n e s t a b l i s h i n g r o o f s t a b i l i t y
c r i t e r i a a n d mi n i mi s i n g p r o d u c t i o n l o s s e s r e s u l t -
i n g f r o m r o o f c a v in g e v e n t s .
S i mp l e a p p r o a c h e s t o t a k i n g t h e t i me d e r i v a t i v e ,
s u c h a s t a k i n g t h e d i f f e r e n c e b e t w e e n t w o c o n s e c -
u t i v e p o i n t s , a r e n o t a p p r o p r i a t e f o r mo s t p r a c -
t i c a l a p p l i c a t i o n s i n c l u d i n g t h i s l e g l o a d i n g r a t e
e s t i ma t i o n p r o b l e m . T h e ma i n r e a s o n f o r t h i s is
t h e l a c k o f r o b u s t n e s s t o n o i s e a n d s i g n a l d i s c o n -
t inu i t i es . An idea l der iva t ive func t ion amp l i f i es
h i g h - f r e q u e n c y n o i s e r e s u l t in g i n a n o u t p u t s i g n a l
t h a t i s n o t v e r y u s e fu l . T h e i n t r o d u c t i o n o f a d
h o c f ixes such as c l ipp ing , l ow-pass f i l t e r ing , e t c
u s u a l l y r e s u l t s i n l o s s o f i n f o r ma t i o n a n d i n h e r -
201

8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 2/9
202 S. Crisafulli and T.P. Med hurst
e n t l a r g e p h a s e d e l a y s . T h u s m o r e - s o p h i s t i c a t e d
t e c h n i q u e s a r e r e q u i r e d f o r a n i m p l e m e n t a t i o n o f
a r o b u s t o n - l i n e a l g o r i t h m .
t i v e l y s t r a i g h t f o r w a r d t o d e s i g n a K a l m a n f i l t e r
a l g o r i t h m o n c e a s ig n a l m o d e l h a s b e e n s p e c i fi e d
a l o n g w i t h t h e c o r r e s p o n d i n g s t a t i s t i c s.
S t a n d a r d a p p r o a c h e s f o r i m p r o v i n g o n s i m p l e
t e c h n i q u e s u s u a l l y r e q u i r e t h e i n t r o d u c t i o n o f
k n o w l e d g e o f t h e s i g n a l c h a r a c t e r i s t i c s a n d n o i s e
s t a t i s t i c s a p r i o r i i n f o r m a t i o n ) . I n t h i s c a se ,
n o i s e r e f e r s t o a n y u n c e r t a i n t i e s i n s i g n a l s d u e
to mo d e l e r r o r s p r o c e s s n o is e ) o r s e n s o r e rr o r s
m e a s u r e m e n t n o i s e) o r a n y o t h e r e r ro r s t h a t c a n -
n o t b e a c c o u n t e d f o r . I n t h i s c a s e , t h e b e s t t h a t
c a n b e a c h i e v e d i s t o s p e c i f y t h e s t a t i s t i c s o f t h e s e
e r r o r s a n d t h e n m a k e u s e o f t h e k n o w l e d g e of
t h e s e s t a t i s t i c s i n o r d e r t o c o p e w i t h t h e s e e r -
r o r s i n t h e b e s t p o s s ib l e w a y . D ig i t a l d i f f e r e n t i a -
t i o n t e c h n i q u e s a r e a v a i l a b le w h i c h y i e l d o p t i m a lp e r f o r m a n c e u n d e r c e r t a i n c o n d i t i o n s C a r l s s o n ,
1989; Car lsson et al . , 1 9 9 1 ). H o w e v e r , t h e d r a w -
b a c k s o f s u c h a p p r o a c h e s a r e c o n c e p t u a l c o m p l e x -
i t y a n d t h e a m o u n t o f e f fo r t r e q u i r e d i n o b t a i n i n g
e x p l i c i t s i g n a l m o d e l s , q u a n t i f y i n g n o i s e s t a t i s -
t ic s , etc. A ls o , a c e r t a in d e g r e e o f e x p e r t i s e i s
r e q u i r e d f o r s u c h a n a p p r o a c h w h i c h i s o f t e n n o t
i m m e d i a t e l y a v ai l a b le t o t h e p r a c t i t i o n e r .
T h e d e v e l o p m e n t o f t h e s i g n a l m o d e l i s f i rs t a d -
d r e s s e d . C o n s id e r a d i s c r e t e t ime s i g n a l Y k, w h e r e
k i s t h e d i s c r e t e t ime i n s t a n t . A s t a t i s t i c a l d e -
s c r i p t io n o f t h e d y n a m i c a l b e h a v i o u r c a n b e o b -
t a i n e d b y a t h e s t o c h a s t i c s i g na l m o d e l o f t h e
f o r m
z k = G q - 1 ) w k 1)
w h e r e w k i s a z e r o m e a n w h i t e n o i s e s e q u e n ce a n d
G q - 1 ) i s a d i s c r e t e - t im e l i n e a r t r a n s f e r f u n c t i o n
i n t e r m s o f t h e b a c k w a r d s h i f t o p e r a t o r q - 1 . S y s -
t e m i d e n t i f i c a t i o n t e c h n i q u e s L j u n g , 1 98 7 ) c a n
t h e n b e u s e d t o f in d t h e b e s t s e t o f p a r a m e t e r s
for G q - 1 ) a n d t h e b e s t s t a t i s t i c s f o r w k s u c h
th a t z k i s cl o s e t o Y k i n s o me s e n s e u s u a l l y l e a s t
s q u a r e s ) .
T h e a b o v e m o d e l 1 ) c a n a l so b e w r i t t e n i n s t a t e -
s p a c e f o r m a s
_xk+l = F_xk + _W 2)
z~ = I=ITxk 3)
I n t h i s p a p e r a n o v e l d ig i t a l d i f f e r e n t i a t o r i s d e v e l -
o p e d w h i c h is b o t h e a s y to i m p l e m e n t a n d u t i l i se si n f o r m a t i o n f r o m a s i g n a l m o d e l a n d s t a t i s t i c s .
T h e K a l m a n f i l te r b as i s o f t h i s d i f f e r e n t i a t o r al -
l o w s t h e i n c o r p o r a t i o n o f a s i g n a l m o d e l a n d n o i s e
s t a t i s t i c s i n a l o g i c a l f a s h io n . H o w e v e r , u n l i k e
t h e o p t i m a l t e c h n i q u e s o f C a r l s s o n et al. 1991)
w h i c h r e q u i r e e x p l i ci t i n f o r m a t i o n o f t h e s i g n a l
m o d e l a n d n o i s e s t a t i s t i c s , t h i s n e w s c h e m e u s e s
t h i s i n f o r m a t i o n i m p l i c i t l y i n it s o p e r a t i o n . I t i s
n o t t h e o p t i m a l i t y o f t h e K a l m a n f i l te r t h a t i s
i m p o r t a n t i n t h i s n e w s c h e m e , b u t r a t h e r t h e d e-
s i g n a p p r o a c h w h i c h h a s f e a t u r e s t h a t l e a d t o a
p r a c t i c a l s o l u t i o n .
2. K A L M A N F IL T E R I N G : B A C K G R O U N D
I N F O R M A T I O N
S o m e r e l ev a n t b a c k g r o u n d i n f o r m a t i o n o n K a l m a n
f i l t e r i n g is f i r s t o f a l l p r e s e n t e d i n t h i s s e c t i o n .
T h e K a l m a n f i l t e r i s a w e ll k n o w n a n d w i d e l y
u s e d a l g o r i t h m . I t h a s b e e n u s e d in m a n y d i v e rs e
f i e ld s s u c h a s p r o c e s s i n d u s t r i e s , a e r o s p a c e , e c o -n o m i c s , t e l e c o m m u n i c a t i o n s e t a A n d e r s o n a n d
Moore , 1979; Sorenson , 1985; Ge lb , 1986; Mu-
r a k a m i , 1 9 9 1) . A s u c c e ss f u l a p p l i c a t i o n o f K a l m a n
f i l t e r i n g re l i e s h e a v i l y o n t h e s e l e c t i o n o f a n a p -
p r o p r i a t e s t a t e - s p a c e s i g n al m o d e l . I t i s r e la -
w h e r e x k i s t h e s t a t e v e c t o r o f t h e s y s t e m , F i s
t h e s y s t e m m a t r i x , I=I i s t h e o u t p u t v e c t o r a n d W_k
i s t h e p r o c e s s no i s e v e c t o r . T h e u n d e r b a r i s u s e d
t o d e n o t e a c o l u m n v e c t o r , b o l d - t y p e d e n o t e s a
m a t r i x a n d t h e s u p e r sc r i p t T d e n o t e s t h e m a t r i x
t r a n s p o s e o p e r a t i o n . G i v e n G q - 1 ) a n d w k in
1 ) , t h e r e a r e ma n y c h o i c es r e a l i s a t i o n s ) o f F , H
a n d W k i n 2 ) - 3 ) w h ic h g iv e r i s e t o i d e n t i c a l z k
i n b o t h s y s t e m s . A n i n t e r m e d i a t e q u a n t i t y x k i s
n o w p r e s e n t i n 2 ) - 3 ) a n d t h i s i s k n o w n a s t h e
s t a t e .
S ig n a l s a r e n e v e r me a s u r e d p r e c i s e ly i n p r a c t i c e
d u e t o m e a s u r e m e n t e rr o r s s e n s o r e r r o rs , p o o r
m e a s u r e m e n t t e ch n i q u es , eta). T h e a b o v e m o d -
e ls c a n b e e x t e n d e d t o a c c o u n t f o r t h i s d e f ic i e n c y
b y t h e i n t r o d u c t i o n o f a n a d d i t i v e t e r m w h i c h a c-
c o u n t s f o r t h e s e e r r o r s s t a t i s t i c a l l y . T h i s c a n b e
w r i t t e n a s
Yk = z~ + nk 4)
w h e r e n k i s t h e m e a s u r e m e n t n o i s e w h i c h i s m o d -
e l le d b y z e r o m e a n w h i t e n o i s e a l so a s s u m e d t o
b e i n d e p e n d e n t o f W k) a n d Yk a r e n o i s y m e a s u r e -
m e n t s o f z k. A s t a t e - s p a c e m o d e l is o b t a i n e d b y
c o m b i n i n g 2 ) - 3 ) a n d 4 ) ,
x _ k + l = F x _ k + _ W k 5 )
y ~ - - H _ T x _ k+ n k . 6 )

8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 3/9
Rob ust On-Line D ifferentiation Techniques
A c o n c i s e d e s c r i p t i o n o f K a l m a n f i l t e r o p e r a t i o n
based on s igna l model (5 ) - (6 ) i s as fo l lows : Given
t h e n o i s y y ~ m e a s u r e m e n t s a n d t h e p r e c is e k n o w l-
e d g e o f r , H a n d t h e s t a t i s t i c s o f W k a n d n ~ ,
t h e K a l ma n f i l t e r p r o v i d e s t h e b e s t l i n e a r ( l e a s t
s q u a r e s ) e s t i m a t e o f t h e s t a t e v e c t o r (k _~) ( t h e h a t
d e n o t e s a n e s t i m a t e ) . F u r t h e r m o r e , i f t h e n o is e
d i s t r i b u t i o n s a r e G a u s s i a n , t h e n t h e e s t i ma t e i sK k =
o p t i ma l ( l e a s t s q u a r e s ) , i . e . t he bes t over a l l l i n -
ear and non l ine ar es t im ato r s . -xk =
R e m a r k : I n p r a c t ic e , t h e p a r a m e t e r s a n d s t a ti s - k _~+1 =
t i c s a r e s e l d o m k n o w n e xa ~ :t ly b u t t h e K a l ma n i ll - P~ + I =
t e r u s u a l l y s t i l l p r o v i d e s v e r y g o o d p e r f o r ma n c e
d u e i t s i n h e r e n t r o b u s t n e s s t o m o d e l u n c e r t a i n -
t ies .
The alman filter algorithm
* O b t a i n v a l u e s f o r ~ a n d ~
* Set in i t ial condi t ions x_0 and P0
* I t e r a t e t h e f o l l o w in g e q u a t i o n s
T h e K a l m a n f i l t e r e q u a t i o n s a r e n o w p r e s e n t e d .T h e s t a t e e s t i m a t e i s g i v e n b y
= + - 7 )
x^~+l = F ~ (S)
w h e r e ~ i s a o n e - s t e p - a h e a d p r e d i c t i o n o f t h e
s t a t e a n d K ~ is t h e K a l m a n g a in . T h e K a l m a n
gain i s g iven by
K ~ = P ~ H H r P k H + a ~ ) - 1 9)
2 is t h e v a r ia n c e o f n ~ . T h e m a t r i x P k i sh e r e ~ .t h e e s t i m a t i o n e r r o r c o v a x i a n ce d e f i n e d b y
P k = E [ x _ ~ ~ ) ~ k - ~ ) T ] i 0 )
where E[ . ] d e n o t e s t h e e x p e c t e d value m e a n ) .
T h i s m a t r i x c a n b e o b t a i n e d r e c u rs i v e ly b y s o lv -
i n g t h e m a t r i x R i c c a ti d i f fe r e nc e e q u a t i o n R D E )
g i v e n b y
P/~+l =
r + H T p
+ 1 1 )
w h e r e ~w i s t h e p r o c e s s n o i s e c o v a r i a n c e g i v e n
by ]E~ = E [W_kW_~] . T h e i n i t ia l c o n d i t io n s P0
a n d _ ~ n e e d t o b e in c l u d e d . T h e r e e x i s t a p p r o -
p r i a t e c h o i c e s o f t h e s e i n i t i a l c o n d i t i o n s w h i c h
r e s u l t in u n b i a s e d e s t i ma t e s fr o m k = 0 . H o w -
ever , i n p rac t i ce the in i t i a l f i l t e r t rans ien t i s usu -
a l l y n o t o f g r e a t i n t e r e s t s o t h e i n i ti a l c o n d i -
t i o n s c a n b e s e t t o a r b i t r a r y v a l u e s . T h e e f f e c t s
o f w r o n g i n i t ia l c o n d i t i o n s a r e q u i c k l y d i s s i p a t e d
u n d e r s t a n d a r d r e a s o n a b l e c o n d i t i o n s ( A n d e r s o n
a n d Mo o r e , 1 9 7 9 ) .
T h e a l g o r i t h m w i l l n o w b e r e w r i t t e n i n a n a l t e r -
n a t i v e c o mp a c t w h i c h i s s u i t a b l e f o r c o d i n g o n a
c o m p u t e r .
203
PkH _ (_I=ITpk_I=I+ cry ) -1 (12)
+ K _ - 1 3 )
_ k 1 4 )
F (P~ - K kH Tp ~) F T + E~o (15)
3. K A L M A N F I L T E R B A S E D
D I F F E R E N T IA T O R : T H E O R Y
T h e p r o b l e m t h a t i s a d d r e s s e d i s t h i s s e c t i o n i s
t o o b t a i n a n e s t i m a t e o f t h e t i m e d e r i v a t i v e o f a
g iven no i sy d i scre te - t im e s igna l , y~ , which i s gen-
e r a t e d f r o m s o m e p h y s i c a l so u r c e . I f t h e s i g n a l is
n o t c o r r u p t e d b y n o i s e i n a n y f o r m , s i mp l e t e c h -
n i q u e s s u c h a s t a k i n g t h e d i f f e r e n c e b e t w e e n t w o
s u c c e s s i v e p o i n t s w o u l d b e s u i t a b l e o r e v e n mo r e
s o p h i s t i c a t e d a p p r o a c h e s a s d e s c r i b e d i n /R . a b i ne r
and Ste ig l i tz 1970) . These t echn iques do no t re-
q u i r e t h e u s e o f a n y e p r i o r i k n o w l e d g e o f t h e
u n d e r l y i n g p r o c e s s w h i ch g e n e r a t e s t h e s ig n a l.H o w e v e r , i n a l mo s t a l l p r a c t i c a l s i t u a t i o n s , t h e
m e a s u r e d s ig n a l i s c o n t a m i n a t e d b y s o m e f o r m o f
n o i se . T h e a b o v e s i mp l e te c h n i q u e s a r e o f t e n u s e -
l es s due to the fac t tha t an idea l d i f fe ren t i a to r in -
h e r e n t l y a mp l i f ie s h i g h - f re q u e n c y n o i s e . T h e a p -
p r o a c h t h a t i s t r a d i t i o n a l l y a d o p t e d i n t h i s c a s e
is to ut i l i se the e p r i o r i k n o w l e d g e o f t h e s i g n a l
mo d e l a n d n o i se s t a t i s t i c s a s i n ( Ca r l ss o n et al .
1991) and(Car l s son , 1989) . Th i s l eads to a so -
l u t io n w h i c h r e q u i r e s a c e r t a i n d e g r e e o f e x p e r -
t i s e t o i mp l e me n t a n d t h u s i s o f t e n f o r mi d a b l e i n
p r a c t i c e .
T h e a p p r o a c h t a k e n i n t h i s p a p e r t o s o l v e t h e
p r o b l e m d o e s n o t u s e i n f o r ma t i o n o f t h e s i g n al
mo d e l a n d t h e n o i s e s t a t i s t i c s e x p l i c i t l y . Ra t h e r ,
they a re impl i c i t i n the des ign so i t i s no t imper-
a t i v e f o r t h e u s e r t o h a v e a n i n t i ma t e k n o w l e d g e
o f K a l ma n f i l t e r i n g o r s y s t e ms i d e n t i f i c a t i o n i n
o r d e r to u s e t h e a l g o r i th m. T h e d e v e l o p m e n t o f
t h e a l g o r i t h m s t a r t s b y b u i l d i n g a s u i t a b l e s i g n a l
mo d e l o f t h e f o r m ( 5 ) -( 6 ) . T h e a p p r o a c h t a k e n
h e r e d o e s n o t u s e s t a n d a r d s y s t e m i d e n t i f i c a t i o n
t e c h n i q u e s b u t r a t h e r a mo d e l s t r u c t u r e i s p o s -
t u l a t e d b a s e d o n t h e d e s i g n e r s i n t u i t io n o f w h a t
c h a r a c t e r i s t i c s t h e mo d e l i s e x p e c t e d t o p o s s e s s .
T h e r e s u lt in g m o d e l h a s o n ly tw o p a r a m e t e r s a n d

8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 4/9
204 S. Crisafulli and T.P. M edhurst
t h e s e a r e t r e a t e d a s u s e r - s p e c i f i e d d e s i g n p a r a m -
e t e r s .
A d e r i v a t i v e e s t i m a t e t h a t i s v e r y l ow - p a s s i n n a -
t u r e i s d e s i r e d f o r t h i s l eg l o a d i n g r a t e a p p l i c a t i o n
d e t a i l s c o n t a i n e d in n e x t s e c t io n ) . T h u s a m o d e l
f o r t h e e v o l u t i o n o f t h e d e r i v a t i v e t h a t h a s s u c h a
c h a r a c t e r i s t i c i s p o s t u l a t e d . A s i m p l e s t o c h a s t i c
m o d e l w h i c h a c h i ev e s t h i s i s
/ )k = i - q - ~ ) 2 w k; 0 < c ~ _ < 1 1 6)
w h e r e , a s i n t h e p r e v i o u s s e c t i o n , w k is z e ro m e a n
w h i t e n o is e , 1 / 1 - q - l a ) 2 i s t h e t r a n s f e r f u n c t io n
c o r r e s p o n d i n g t o G q - 1 ) a n d d ~ i s t h e d e r iv a t i v e
v a l u e. T h i s m o d e l f o r d~ c o n s i s ts o f w h i t e n o i s e
f i l t e r e d b y a l o w - p a s s f i l t e r . T h e f i l t e r h a s a r e a ld o u b le p o l e a t z = a i n t h e z -p l a n e . T h e d e s i r e d
s l ow t r a n s i e n t r e s p o n s e o f t h e d e r i v a t iv e c a n b e
o b t a i n e d b y c h o o s i n g a n e a r o r e q u a l o n e . T h i s
m o d e l c a n a l s o b e c o n s i d e r e d a s a l e a k y d o u b l e
i n t e g r a t o r a p o l e a t z = 1 i s a n i n t e g r a t o r , a
p o l e a t z = a ; a < 1 i s a l e a k y i n t e g r a to r ) . A n
e q u i v a l e n t r e p r e s e n t a t i o n o f t h i s m o d e l i s
d k = 2 a d k - 1 - a 2 d k - 2 + w k 17)
0 1 0 )
F = - a 2 2 a 0 .
0 ~- 1
U s i n g t h e a b o v e d e f i n i ti o n s , t h e s y s t e m s p e c if i ed
b y 1 8 ) - 2 1 ) c a n b e e q u iv a l e n t l y w r i t t e n a s
_xk+1 = F x k + w k 22)
ya = t:I_Tx_~+ nk 23)
dk = 8T_xk. 24)
N o te t h a t 2 2 ) - 2 3 ) is i d e n t i c a l t o 5 ) - 6 ) . I t is
n o w s t r a i g h t f o r w a r d t o c o n s t r u c t a K a l m a n f i l t e r
b a se d o n 2 2 ) - 2 3 ) s i n c e i t i s i n s t a n d a r d f o r m .
T h e so lu t i o n is g iv e n b y 7 ) - 1 1 ) . T h e d e r iv a t i v e
e s t i m a t e f ol lo w s d i r e c t l y fr o m 2 4 ) a n d i s g iv e n
b y
~ k = _ r 3T _ ~ k . ( 2 5 )
T h e q u a n t i t y ] ~ h a s t h e f o r m
z ~ = ~ [ w _ k w ~ ]
= E 0
0 0 0 )= 0 ~ 0
0 0 0
~, 0 ]
( 2 6 )
o r i n s t a t e - s p a c e f o r m i t c a n b e g i v e n b y 2 i s t h e v a r i a n c e o f w ~ .he re a w
0v -k + 1 = - a 2 2 a v _ k + 1 8 )
W k
d k = ( 0 1 ) _ ~ k ( 1 9 )
w h e r e v k is t h e s t a t e v e c to r . S in c e t h e a b o v e i s a
m o d e l f o r t h e d e r i v a t i v e o f t h e s i g n a l, t h e a c t u a l
s i g n a l P k ) c a n b e m o d e l l e d b y i n t e g r a t i o n o f t h i s
q u a n t i t y . I n d i s c r e t e - t i m e t h i s ca n b e ac h i ev e d
s i m p l y b y t h e r e c u r s i o n
P k + l = P k + d k r . 20)
w h e r e r i s t h e s a m p l i n g p e r i o d . T h e q u a n t i t y P k
c a n n o t b e m e a s u r e d d i r e c t ly d u e t o m e a s u r e m e n t
n o i s e , t h e a c tu a l s i g n a l Yk a n o i sy v e r s io n o f P k )
i s m e a s u r e d ,
Y ~ = P k + n k 21)
w h e r e n t i s o n c e a g a i n ze r o m e a n w h i t e m e a s u r e -
m e n t n o i s e . T h i s n o w c o m p l e t e s t h e s ig n a l m o d e l .
T h i s m o d e l c a n b e r e p r e s e n t ed i n a c o m p a c t f o r m
b y d e f i n i n g c e r t a i n q u a n t i t i e s . D e f i n e
w.= o.)H r = o o 1 ) _ I 3 r= o 1 o )
T h e a b o v e a l g o r i t h m c a n b e s p e c i f ie d b y o n l y t w o
p a r a m e t e r s , a t h e d o u b l e p o le p o s it i o n a n d 7 t h e
r a t i o o f t h e p r o c e s s n o i se t o t h e m e a s u r e m e n t
n o i s e w h ic h i s d e f in e d a s
2A O to
3 = ~ . ( 2 7)
T h e t r ad i ti o na l a p p r o a c h t o K a l m a n f il te ri ng i c -
t a t es t h a t t h e s e t w o p a r a m e t e r s b e e v a l u a t e d v i a
s y s t e m s i d e nt i f ic a t i on t e c h n i q u e s a n d t h u s t h e
p r o b l e m i s f u l l y s p e c i f ie d i n a d v a n c e . T h i s a p -
p r o a c h t r e a ts t h e s e t w o p a r a m e t e r s a s u s er - s pe c -
i fi ed d e s i g n p a r a m e t e r s a n d i t i s u p t o t h e u s e r
t o t u n e t h e s e t o o b t a i n t h e d e s i r e d t y p e o f p e r -
f o r m a n ce . T h e s i g n a l m o d e l a n d n o i s e s ta ti s-
t i cs a r e t h u s i m p l i c it i n t h e a l g o r i t h m . I n o t h e r
w o r d s , t h e i r c h o i c e s a r e d i c t a t e d b y s u b j e c ti v e -
t y p e p e r f o r m a n c e m e a s u r e s r a t h e r t h a n t h e t ra -
d i t i o n a l o b j e c t i v e c r i t er i a u c h a s p r e d i c t i o n e r r o r
v a r ia n c e . T h e p a r a m e t e r s c a n b e c o n s i d e re d t o
h a v e s o m e f o r m o f a l g o r i th m i c si g ni f ic a nc e . T h e
p a r a m e t e r 3' c a n b e i n t e r p re t e d a s a l t e r i n g t h e
b a n d w i d t h o v e r w h i c h t h e di f fe r en t ia t io n s t a k i n g
p l a c e a n d t h e a a d j u s t s t h e f o r g e t t i n g f a c t o r o f
t h e a l g o r i t h m . T h e s e p a r a m e t e r s a l s o h a v e s ig ni f-
i c a n c e f r o m a m i n i n g v i e w p o i n t . I t i s l i ke l y t h a t
8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 5/9
Robust On-Line D ifferentiationTechniques 205
Fig. 1.
600
500
400
300
2OO
1000
L
100l i i i i L i
O O00 300 400 500 600 700 800
time
i 0 0 0
G
C t }0
2
0
2
i
4 0 i 0 0 2 0 0 600 7000 ~ 0 500 900 1000
time
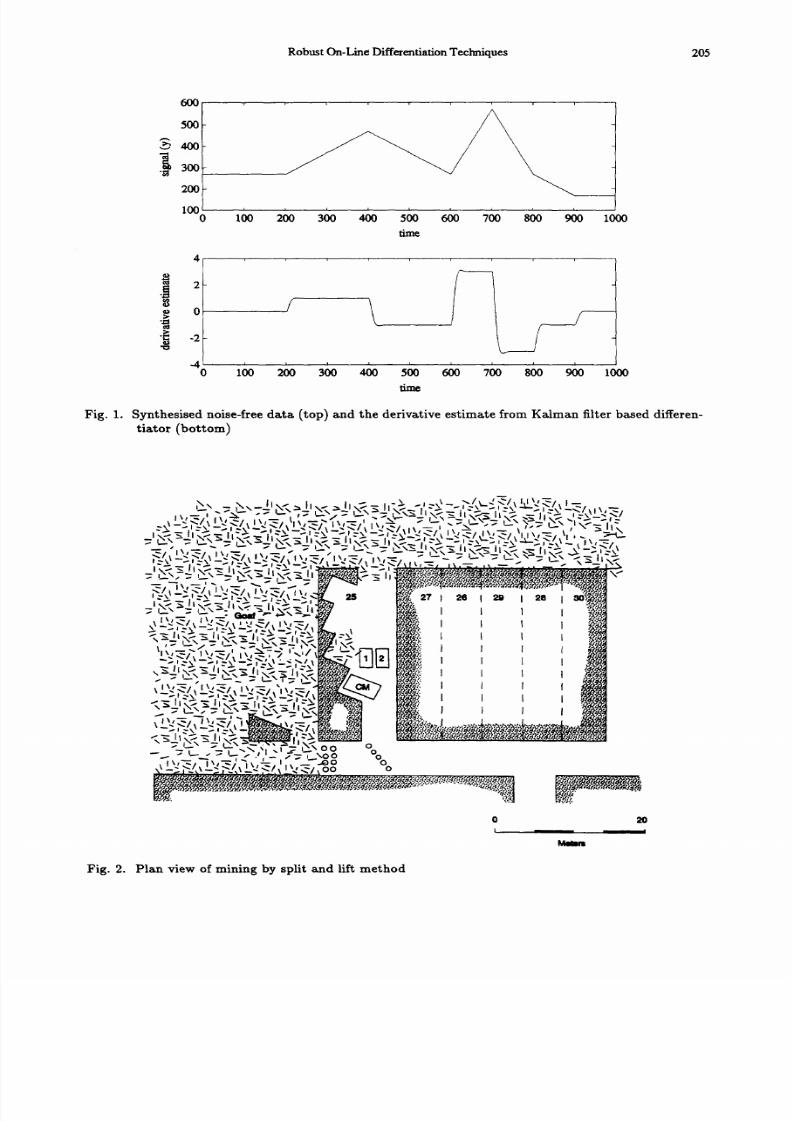
Syn the s i se d no i se - f re e da t a t op) a nd th e de r iva t ive e s t im a te f r om Ka lm a n f i lt e r ba se d d i f f e re n-
t i a t o r b o t t o m )
I
F i g . 2 . P l a n v i e w o f m i n i n g b y s p li t a n d l if t m e t h o d

8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 6/9
206 S. Crisafulli and T.P. Medhurst
the choice of these parameters will ultimately be
determined by these mining-based criteria.
The other main feature of this algorithm is its
ability to handle signal discontinuities and bad
data . A linear model often models a physical pro-
cess quite well over the region of interest . How-
ever, difficulties can be encounte red when anoma-
lies occur, such as discontinuities in the data or
when some other atypical behaviour occurs (eg.
a mining cycle delay in the leg loading rate ap-
plication). Provided these conditions can be de-
tected, the Kalma n filter can cope with these ab-
normal behaviours by setting the measurement
2 to a high value. In other words,oise variance a n
no confidence is given to the measurements Yk
and they are treated as being extremely noisy.Also, the occurrence of an anomaly may result in
the past dat a being useless and so the memory of
the algorithm should be reset. This can be easily
performed by re-initialising the Riccati equation
solution Pk and, if necessary, the Kalman filter
state.
The ideal case performance is now demon-
strated by presenting simulation results based on
noise-free dat a. Fig. 1 shows a plot of syn-
thesised ramp signals (top) and the derivativeestimate (bot tom) . Notice the derivative esti-
mate exhibits critically damped-like transitions
between levels with a minimum amount of un-
dershoot, overshoot and ringing. This perfor-
mance was obtained by tuning the parameters
to the following settings: a) double pole position
a = 0.93 b) process noise to measurement noise
rat io 7 = 0.0001. These settings are also used on
the leg loading rate est imation application in the
next section.
4. KALMAN FILTER BASED
DIFFERENTIATOR: APPLICATION
A brief overview of pillar extraction coal min-
ing is first presented to provide readers without
coal mining expertise with sufficient background
knowledge in order to appreciate the application.
This will be followed by some geomechanical de-
tails of the application and then t he results of
applying the algorithm to the problem.
The fu ndame ntal concept of bord and pillar meth-
ods of mining is that the coal seam is divided
into a regular block-like array by driving pri-
mar y headings through it which are intersected at
regular intervals by connecting cutthrough head-
ings. The pillars support the overlying st rat a dur-
ing the first workings as the headings are driven.
They may be extracted systematically on subse-
quent second workings, depending on t he scheme
adopted.
A popular scheme for extracting coal pillars is
the split and lift method. Fig. 2 provides a plan
view of this mining sequence. Afte r first workings
the coal pillars can be mined by first driving a
heading through the pillar, a split, and then sub-
sequently removing the remaining coal or fender.
Mining of the fender is undertaken by driving into
the coal with a continuous miner (CM) (see Fig.
2) in such a manner as to retreat away from the
unsupported area. After extraction the area col-lapses or caves to form an area devoid of coal
called the goal A more comprehensive descrip-
tion is presented in(Sleeman, 1986).
Up to 90% extr action of the n s tu coal can be ob-
tained in pillar extraction mining and has distinct
advantages over longwall mining methods where
highly faulted deposits exist. Typically, produc-
tion rates of 800 tonnes per unit production shift
are achieved with costs per tonne ranging from
AUD$15.00 to AUD$35.00 depending on the op-eration.
Numerous studies have shown tha t the success of
pillar extraction methods depend on establishing
the correct fender width for the particular min-
ing conditions. The fender width should be suffi-
cient to allow it to yield when it is formed, thus
providing a destressed condition for subsequent
extraction. If the fender is carelessly formed, of
wrong dimensions or varying width, problems oc-
cur during its extraction and coal is left behind
as stooks (see Fig. 3), causing severe roof control
problems during later stages. Such problems can
result in loss of production for periods of days
and can sometimes cascade periodically through-
out the entire panel.
Breaker Line Supports (BLSs) are remote-con-
trolled mechanised roof supports that provide a
supporting (hydraulic powered) force by push-
ing up against the roof during the mining op-
eration (item 1 and 2 in Figs. 2 and 3). They
are used for roof control in bord and pillar panel
layouts, specifically during pillar ext raction min-
ing. BLSs have been operating in Australian un-
derground coal mines since 1987 (McCowan and

8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 7/9

8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 8/9
208 S. Crisafulli and T.P. M edhurst
B r o w n , 1 9 9 0 ) .
F i g . 3 s h o w s t h e s t r a t a l o a d i n g re g i m e on t h e
B L S u n i t s a n d a s s o c i a t e d f e n d e r t o b e m i n e d .
B a s e d o n t h e a u t h o r s f i e ld o b s e r v a t i o n a n d d a t a
c o l l e ct i o n , t h e p r o p o s e d m e c h a n i s m s u g g e s t s t h a t
t h e l o w e r i n g o f t h e b r i d g i n g b e a m a b o v e t h e r o o f
s u p p o r t s i s c o n t r o l l e d p r i m a r i l y b y s u p p o r t o f -
f e r ed b y t h e y i e l d i n g f en d e r . T h e e f fe c t s o f ro c k
s t r u c t u r e a n d g e o l og i c a n o m a l i e s c a n b e a c t i v e in
m o v e m e n t a n d c h a r a c t e r o f t h e r o o f b e a m b u t d u e
t o t h e r e l a t iv e l y h i g h s t i f fn e s s o f t h e B L S u n i t s
a n d t h e a r e a t h e y c o v e r w h e n a c t i v e l y p r e s s e d
a g a i n s t t h e r o o f , l e g l o a d i n g m e a s u r e m e n t s a r e
s u g g e s t e d t o b e a k i n t o f e n d e r r e s p o n s e . I n g e n -
e r a l t e r m s , i f t h e f e n d e r p r o v i d e s a fi n i te a m o u n t
o f s u p p o r t , t h e n l o a d i n g r a t e s c a l c u l a t e d f r o mm e a s u r e m e n t s t a k e n a d j a c e n t to t h a t s u p p o r t c a n
h e l p d e l i n e a t e h o w m u c h a n d f o r h o w l o n g t h e
f e n d e r c a n s u r v i v e t o k e e p t h e t u n n e l f r o m c o l -
l a p s in g . O n e c o u ld e n v i s a g e a p o in t o f n o re -
t u r n i n t e r m s o f s u p p o r t o r a c r it i c a l l o a d i n g r a t e
w h e n t h e f e n d e r i s e x t r a c t e d . B a s e d o n t h e s e a r-
g u m e n t s , i t i s cl e a r t h a t o n - l in e e s t i m a t i o n o f t h e
B L S l e g l o a d i n g r a t e s a r e a n i n v a l u a b l e q u a n t i t y
in a s s e s s in g r o o f s t a b i l i t y . T h e t o p p lo t o f F ig s .
4 a n d 5 s h o w t y p i c a l B L S l e g p r e s s u r e d a t a d u r -
i n g f a v o u r a b l e a n d u n f a v o u r a b l e ( r o o f l o w e ri n g
p r o b l e m s ) m i n i n g c o n d i t i o n s r e s p ec t iv e l y . N o t i c e
t h e p r e d o m i n a n t l y n e g a t i v e a n d p o s i t i v e r a t e s f or
e a c h r e s p e c t i v e s e q u e n c e . C h a r a c t e r i s i n g t h e s e
o b s e r v a t i o n s f o r e a c h min e s i t e w i l l b e t h e k e y i n
a l e r t i n g m i n i n g p e r s o n n e l o f t h e o n s e t o f in s t a b i l-
i ty.
T h e K a l m a n f i lt e r b a s e d d i f f e r e n t i a t o r i s n o w a p -
p l ie d to t h e B L S le g p r e s s u r e d a t a . F r o m a n
a l g o r i t h m i c p o i n t o f vi e w , t h e m a i n o b j e c t i v e is
t o p r o v id e a r e l i a b l e o n - l in e l e g l o a d in g r a t e e s -
t i m a t e s i n s p i t e o f s i g n al n o i se a n d d i s c o n t in u -
i t ie s . I n m o s t p r o b l e m s o f t h i s t y p e , t h e s u c c es s
o f t h e a p p l i c a t i o n o f t e n re l ie s o n t h e i n t r o d u c t i o n
o f a p r / o r / k n o w l e d g e . I n t h i s p a r t i c u l a r a p p l i c a -
t i o n l a r g e d i s c o n t i n u i t i e s c a n b e o b s e r v e d i n t h e
l e g p r e s s u r e d a t a d u e t o t h e p e r i o d i c r e l o c a t i o n
a n d r e a d j u s t m e n t o f t h e B L S ( s e e t o p p l o t s o f
F ig s . 4 a n d 5 ) . A l s o n o t i c e h o w th e t r e n d i n
t h e r e g i o n o f i n t e r e s t i s r el a t i v e ly s m o o t h a n d s o
e v e n r e l a t i v e l y s m a l l d i s c o n t i n u i t i e s c a n b e c o n -
s i d e r e d as a n a n o m a l y . T h e s e o b s e r v a t i o n s c a n
b e i n c o r p o r a t e d i n t o t h e s c h e m e a s a pr ior i in-
f o r m a t i o n a n d w i l l r e s u l t i n m u c h b e t t e r p e r f o r -
m a n c e . F o r t h i s p a r t i c u l a r m i n e s it e , t h e d a t a
w a s d e e m e d t o b e u n r e l i a b l e i f t h e p r e s s u r e s w e r e
b e lo w 1 5 0 b a r o r i f t h e i n t e r s a m p le d e v i a t i o n w a s
mo r e t h a n 2 0 b a r . I n t h e s e c a s e s , o n e o r mo r e o f
t h e f o l l o w in g a c t i o n s c a n b e t a k e n i ) t h e m e a s u r e -
me a t n o i s e v a r i a n c e ( a ~ ) i s s e t t o a l a r g e v a lu e
i i ) t h e R ic c a t i e q u a t i o n s o lu t i o n ( e s t ima t io n e r -
r o r c o v a r i a n c e P k ) i s r e - i n i t ia l i s e d t o a l a r g e v a lu e
a n d i i i ) t h e K a l m a n f i l t e r s t a t e e s t i m a t e ( x ~ ) i s
r e - i n i ti a l i s e d . S p e c i fi c a ll y , t h e a c t i o n s t h a t w e r e
t a k e n i n t h i s a p p l i c a t i o n a r e :
i f yk _< 150 t h e n pe r form i ) , i i ) an d ii i )
i f lY~ - Yk - l l >__ 20 t h e n pe r for m i ) an d i i ) .
T h e b o t t o m p l o t s o f F i g s . 4 a n d 5 sh o w t h e
d e r i v a ti v e e s t i m a t e f r o m t h e K a l m a n f i l te r b a s e d
d i f f e re n t i a t o r. N o t i c e h o w s m o o t h t r e n d s a r e p r o-
v i d e d w i t h o u t e x c es s iv e p h a s e d e l a y s . T h i s h y -d r a u l i c le g p re s s u r e r a t e i n f o r m a t i o n c a n t h e n b e
u s e d t o e s t a b l i s h c r i t i c a l r a t e s , i n f e r min in g c o n -
d i t i o n s a n d a i d u n d e r g r o u n d c o a l m i n e r s i n d e ci d -
i n g w h e n t o w i t h d r a w f r o m u n s a f e o r u n p r o f i t a b l e
m i n i n g a r e as .
5 . C O N C L U S I O N
A n o v e l o n - l i n e d ig i t a l d i f f e r e n t i a t o r h a s b e e n d e -
v e lo p e d w h ic h c a n b e e a s i l y a n d r e l i a b ly u s e d i n
p r a c t ic e . T h e a l g o r i t h m c a n b e e a s il y t u n e d b y
t h e u s e r t o a c h ie v e t h e d e s i r e d p e r f o r m a n c e w i t h -
o u t r e q u i ri n g e x p e r t k n o w l e d g e o f K a l m a n f i lt e r
a n d s y s t e m s i d e n t if i c a t i o n t h e o r y . T h e a p p l ic a -
t i o n t o t h e B L S d a t a w a s s u c c e s s fu l a n d a l lo w s
r e a l - t i m e c a l c u l a t i o n o f k e y g e o m e c h a n i c a l p a -
r a m e t e r s w h i c h a i d i n a s s e s s m e n t r e g a r d i n g r o o f
s t a b i l i t y w h e r e m i n e r s a r e w o r k i n g i n h a z a r d o u s
a r e a s . R e s e a r c h i n t h i s a r e a is o n g o in g w i th t h e
p u r p o s e o f p r o v i d i n g i n f o r m a t i o n r e g a r d i n g r o o f
a n d p i l l a r l o a d i n g r e g i m e s a n d f o r e s t a b l i s h i n gmin e - b a s e d B L S l e g lo a d in g r a t e s f o r c r i ti c a l c o n -
d i t i o n s .
6 . R E F E R E N C E S
A n d e r s o n , B . D . O . a n d J . B . M o o r e ( 1 9 7 9 ) , Opti-
mal Fi l ter ing P r e n t i c e - H a l l , U S A .
Car lsson , B . (1989) , Dig i ta l Di f f eren t ia t ing F i l -
t er s and Model Based Fau l t Detec t ion P h D
th e s i s , U p p s a l a U n iv e r s i t y , S w e d e n .
C a r l s s o n , B . , A . A h l6 n a n d M. S t e r n a d ( 1 9 9 1 ) ,
O p t i m a l D i f f e r e n t i a t i o n B a s e d o n S t o c h a s t i c
S ig n a l Mo d e l s , I E E E Tr a n s a c t i o n s o n S i g n a l
Processing 39 pp. 341-353.

8/13/2019 Robust on
http://slidepdf.com/reader/full/robust-on 9/9
Robu st On-Line DifferentiationTechniques 209
r ~
500
400
300
200
100
00
J
100 200 300 400 500 600
~i T
700 800 900 1000
O
2
0
-2
-40
~
100 200 300 400 500 600 700 800 900 1000
time 10 see intervals)
F i g . 5 . Typi c a l B LS le g p re s sure da t a dur i ng unfa voura b l e mi n i ng c ondi t i ons t op) a nd t h e de r i va ti vee s t i ma t e f rom t he Ka l ma n f il te r ba se d d if fe re n ti a t o r bo t t om )
Fol l i ng t on , I .L . a nd T .P . Me dh urs t 1992), Ap-
p l i c a t i on o f Adva nc e d E l e c t ron i c Ge ot e c hn i -
c a l Mo ni t o r i ng Te c hni que s i n A us t ra l i a n Un-
d e r g r o u n d C o a l M i n i n g , Proc. 6th Austra lia-
Ne w Zealan d Conference on Geomechanics
Chris tchurch, New Zealand, pp. 242-246.
Fo l l i ng t on , I .L ., I t. T rue ma n, T .P . M e dhurs t a nd
I .N . Hut c h i nso n 1992), C ont i nuou s Mo ni t o r -
i ng o f Me c ha ni se d B re a ke r L i ne Suppor t s t o
Inve s t i ga t e R oof a nd P i l l a r B e ha v i our , Proc.
11th Interna t ional Conference on Ground Con-
trol in Mining Wollongong, Aust ra l ia , Vol .
IV, pp. 407-410.
Gelb, A. 1986) , A ppl i e d Opt imal E s t imat ion
M I T P r e s s , U S A .
Hu t c h i nson , I .N . a nd T .P . Me dh urs t 1992), Mon-
i t o r i ng o f Mobi l e Me c ha ni se d R oof Suppor t s
i n U n d e r g r o u n d C o a l M i n e s, Proc . Austral ian
I ns t rum e nta t ion and Me asure m e nt Conferenc e
Auc k l a nd , Ne w Ze a l a nd .
Ljun g, L . 1987), Sy stem Ident i f icat ion: Theory
for the User Prent ice-Hal l , USA.
Maleki , H. 1990), A New Rock Mass Fa i lure Cri-
t e r i a B a se d on R a t e o f Move me nt , Proc. 9th
Internat ion al Conference on Ground Control
in Min ing M organ town , USA , pp. 117-127.
McC owan, B .C. and A.G. Brow n 1990), Int ro-
duc t i on o f Me c ha ni sed B re a ke r L i ne Sup po r t s
into Aust ra l ia , A us t ra l ian Co al J ourna l 27 ,
pp. 25-30.
M uraka mi , A. 1991), Studies on the Appl icat ionof Ka lma n Fi l ter ing to some Geomeehanical
Problems Related to Safe ty Assessment P h D
thes i s , Kyoto Univers i ty , Japan.
Rabine r , L .R. and K. Ste igl i t z 1970), Th e De-
s ign o f W i de -B a nd R e c urs ive a nd Nonre c urs i ve
Digi ta l Di ffe rent ia tors , I E E E Transac t ions on
Audio and Electroacoustics A U - 1 8 .
Sleeman, J . 1986), Bord and Pi l l a r Mining, In:
Australasian Coal Min ing Prac t ice C.H. Mar-t i n , Ed . ) , M onog ra ph Se ri e s No. 12 , Th e Aus -
t r a l a si a n I ns t i t u t e o f M i n i ng a nd M e t a ll u rgy .
Sorenso n, H.W. 1985), Kalman F i l t e r ing The ory
and Appl icat ion IEEE Pre s s , USA.
Top Related