





Languages
Pages
Legal

©20
08 T
he M
athW
orks
, Inc
.
® ®
Production Code Generation (PCG)Time Machine Tom Erkkinen
Embedded Applications Manager
The MathWorks, Inc.

2
® ®
Wayback Machine (www.archive.org)NACA “Production Coders” - 1949
First Production Coders
3
® ®
Y2K
500 staff
MathWorks – Oct 12 1999 (Release 11)
New
Wayback Machine
First MathWorks Production Coder

4
® ®
Simulink Code Generation - 2005Simulink Code Generation - 1999
“Now supports two forms of code generation: rapid prototyping and production”

5
® ®
Agenda
PCG Historical Review1990s (Circa Release 11)2000s (Circa Release 14)Today (R2008a)
New Features and TrendsExecutable SpecificationDetailed DesignCode Generation and IntegrationStandards and Certification
6
® ®
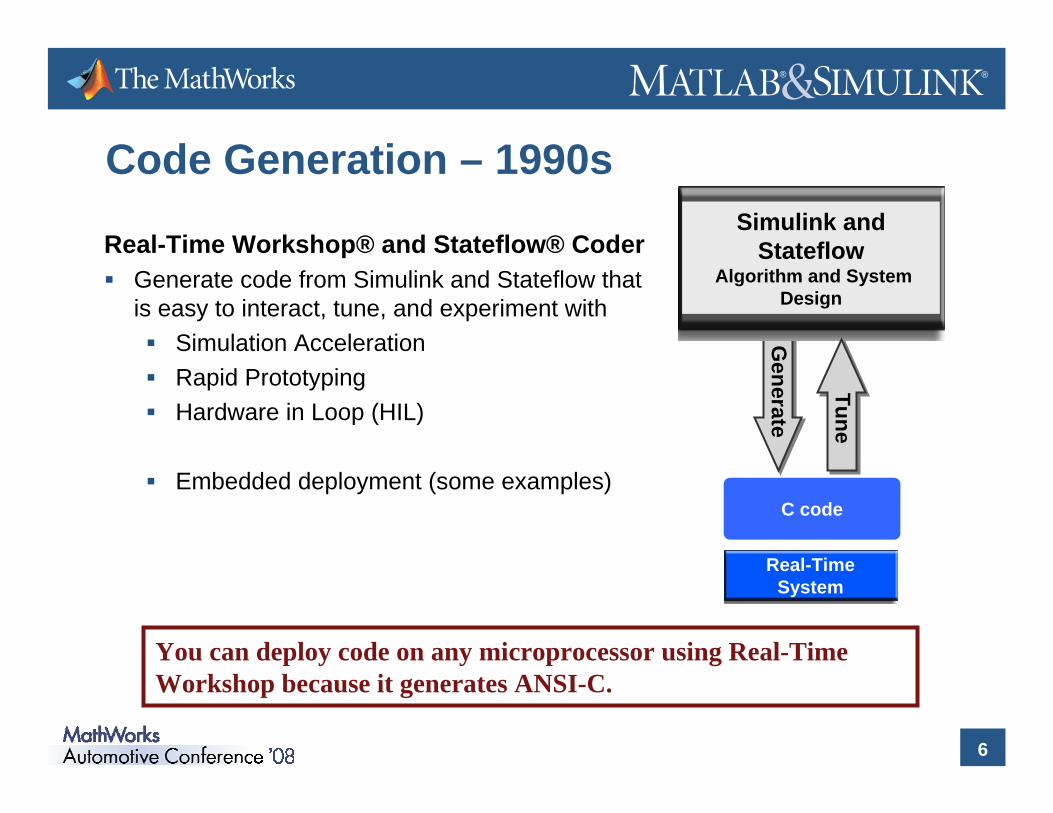
Code Generation – 1990s
Real-Time Workshop® and Stateflow® CoderGenerate code from Simulink and Stateflow that is easy to interact, tune, and experiment with
Simulation AccelerationRapid PrototypingHardware in Loop (HIL)
Embedded deployment (some examples)
You can deploy code on any microprocessor using Real-Time Workshop because it generates ANSI-C.
Real-Time System
C code
Generate
Generate
Simulink and Stateflow
Algorithm and System Design
TuneTune
7
® ®
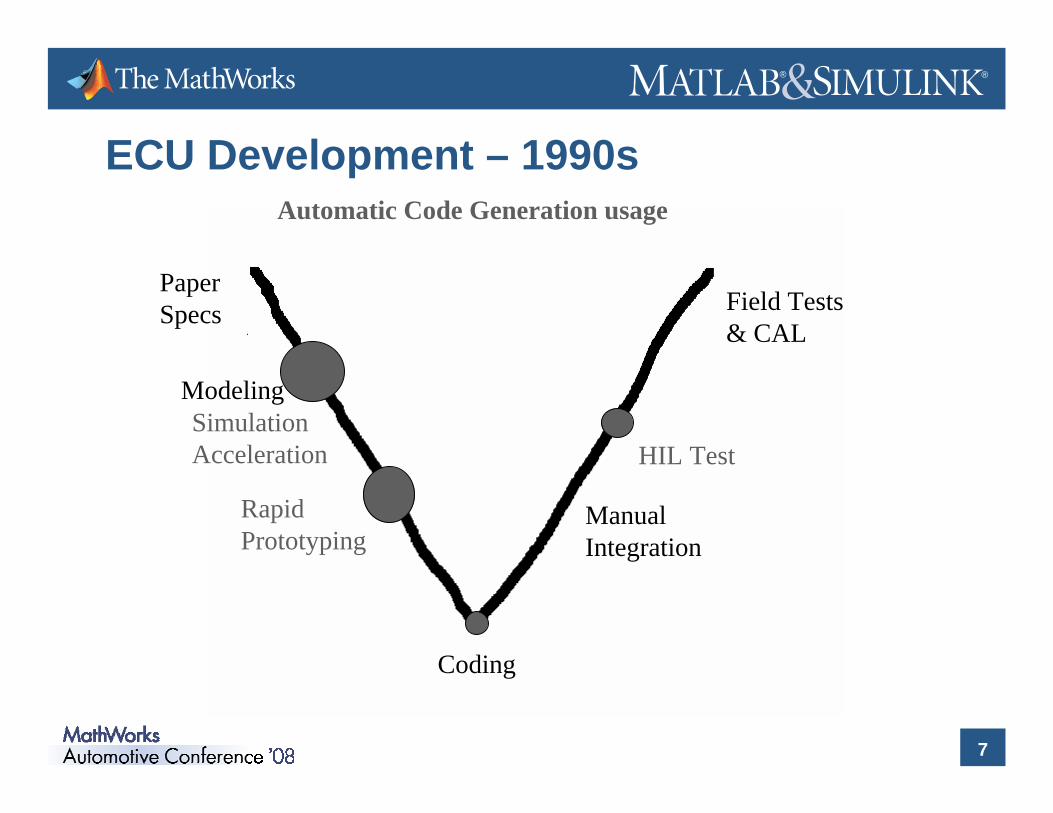
ECU Development – 1990s
Paper Specs
Coding
Modeling
Field Tests & CAL
Automatic Code Generation usage
Rapid Prototyping
HIL Test
ManualIntegration
Simulation Acceleration
8
® ®
Simulink Code Generation (R14)Code Generation (R11)

9
® ®
Agenda
PCG Historical Review1990s (Circa Release 11)2000s (Circa Release 14)Today (R2008a)
New features and trendsExecutable SpecificationDetailed DesignCode Generation and IntegrationStandards and Certification
10
® ®
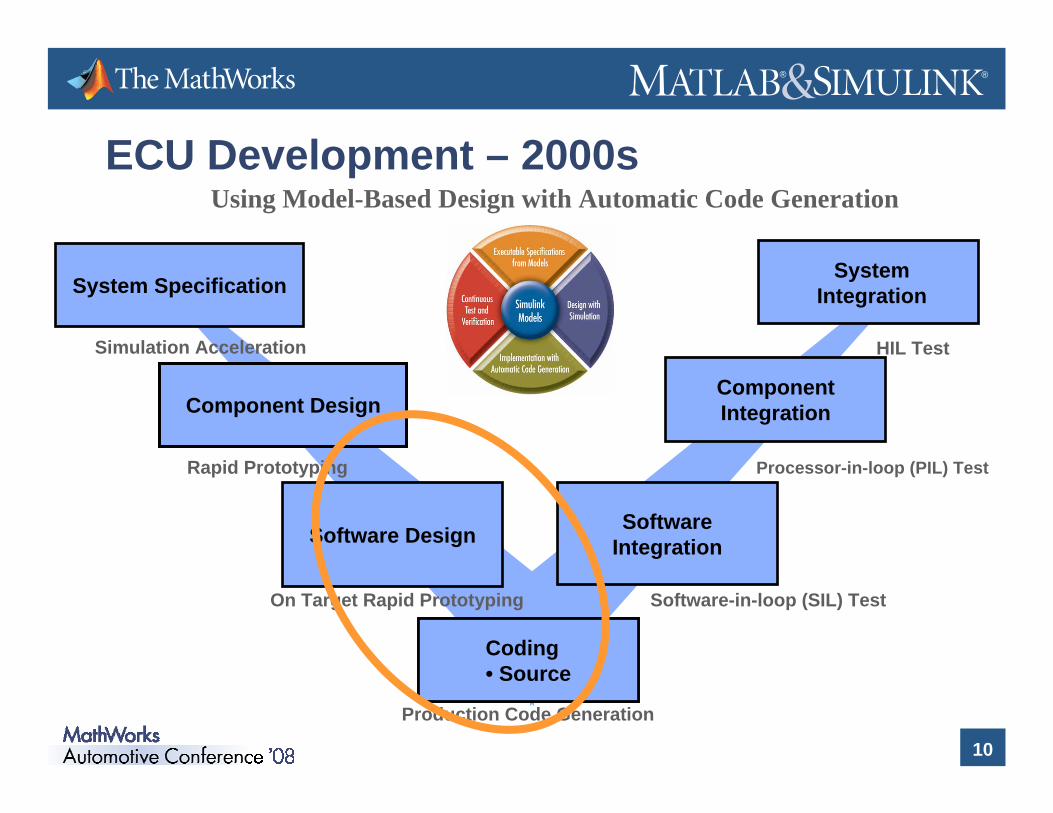
Component Design
Software Design
Coding• Source• Object
SoftwareIntegration
Simulation Acceleration
Rapid Prototyping
On Target Rapid Prototyping Software-in-loop (SIL) Test
Processor-in-loop (PIL) Test
HIL Test
Production Code Generation
Using Model-Based Design with Automatic Code GenerationECU Development – 2000s
System Specification
Coding• Source
ComponentIntegration
SystemIntegration
11
® ®
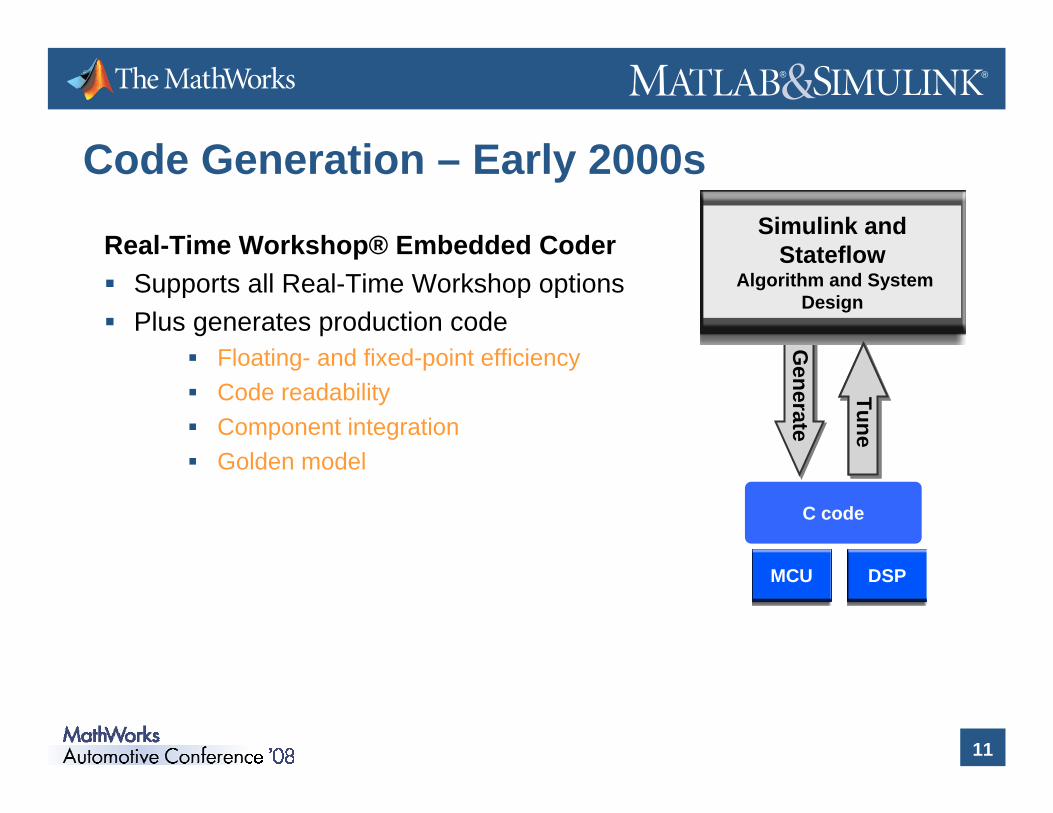
Code Generation – Early 2000s
Real-Time Workshop® Embedded Coder Supports all Real-Time Workshop optionsPlus generates production code
Floating- and fixed-point efficiencyCode readabilityComponent integrationGolden model
C code
Generate
Generate
Simulink and Stateflow
Algorithm and System Design
VerifyVerify
MCU DSP
TuneTune

12
® ®
MAC 2005 - GMPT
More EfficientThan Hand

13
® ®
MAC 2005 - Visteon

14
® ®
MAC 2005 – Golden Model
15
® ®
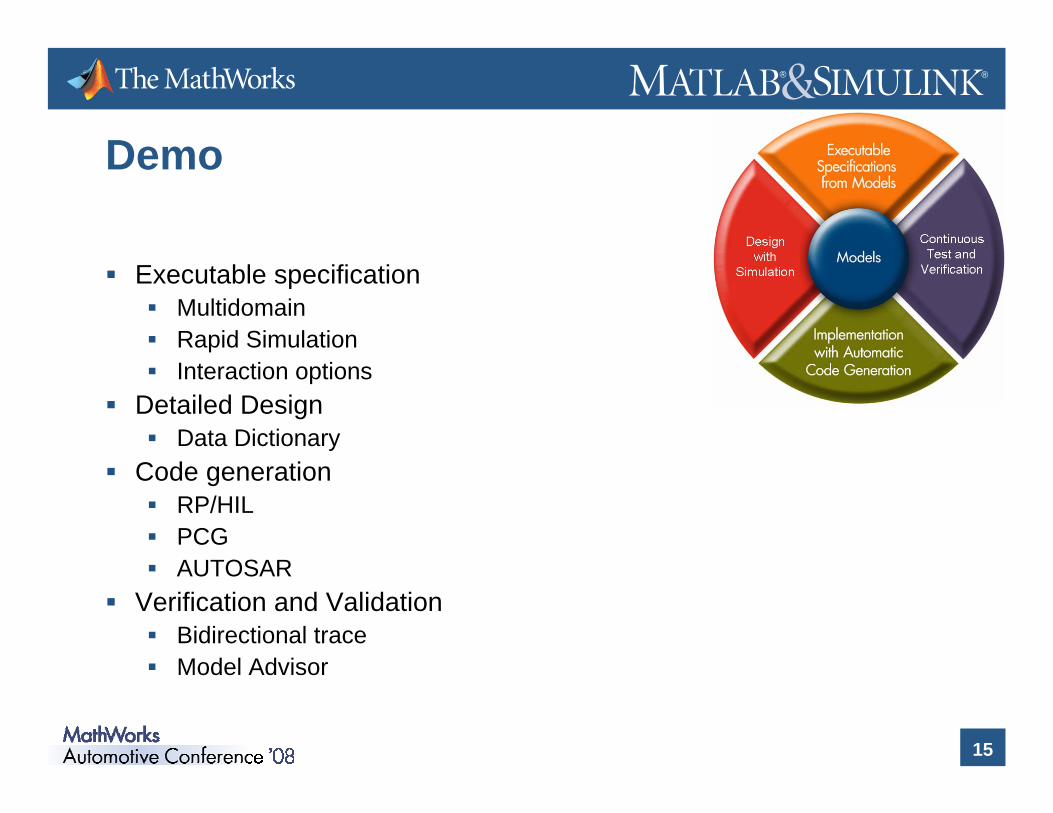
Demo
Executable specificationMultidomainRapid SimulationInteraction options
Detailed DesignData Dictionary
Code generationRP/HILPCGAUTOSAR
Verification and ValidationBidirectional traceModel Advisor

16
® ®
Code Generation – Early 2000s
Real-Time Workshop® Embedded Coder Generates efficient code that can be customized to look like hand code for
Production Code Generation
Embedded TargetsProvide target specific blocks/features for
On-Target Rapid PrototypingC code
Generate
Generate
Simulink and Stateflow
Algorithm and System Design
VerifyVerify
MCU DSP
TuneTune
17
® ®
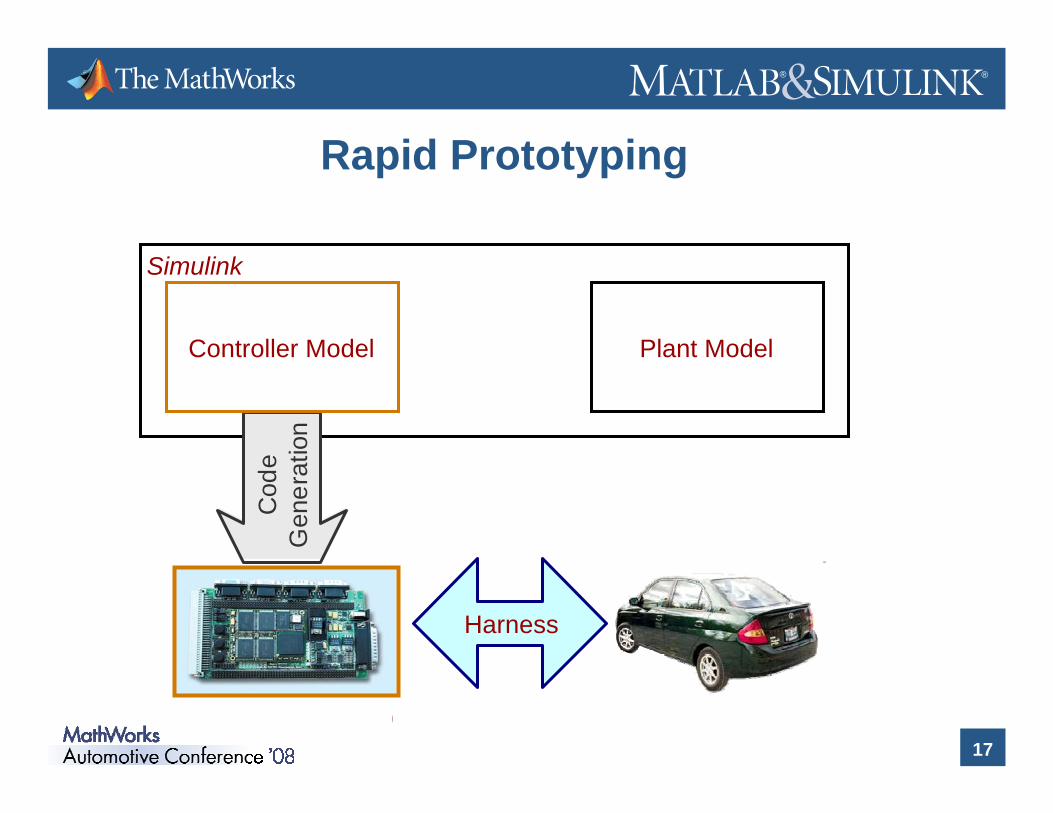
Simulink
Harness
Cod
eG
ener
ati o
n
Plant ModelController Model
On-Target Rapid Prototyping
Embedded Target (MPC5xx)
18
® ®
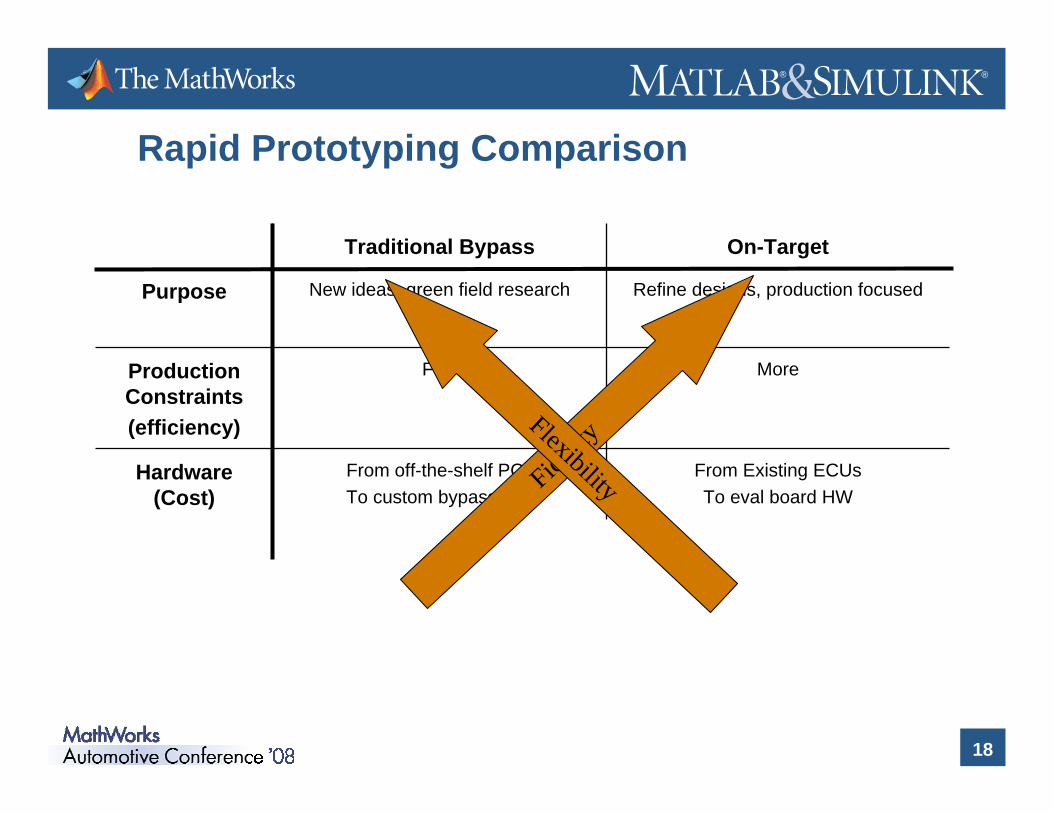
Rapid Prototyping Comparison
MoreFewProduction Constraints(efficiency)
From Existing ECUsTo eval board HW
From off-the-shelf PCs To custom bypass HW
Hardware (Cost)
Refine designs, production focusedNew ideas, green field researchPurpose
On-TargetTraditional Bypass
Fidelity
Flexibility

19
® ®
Code Generation – Early to Mid 2000s
Real-Time Workshop® Embedded Coder Generates efficient code that can be customized to look like hand code for
Production Code Generation
Links and TargetsProvide target specific blocks/features for
On-Target Rapid PrototypingSIL and PIL support
C code
Generate
Generate
Simulink and Stateflow
Algorithm and System Design
VerifyVerify
MCU DSP
TuneTune
20
® ®
MAC 2004 – DC Trucks
21
® ®
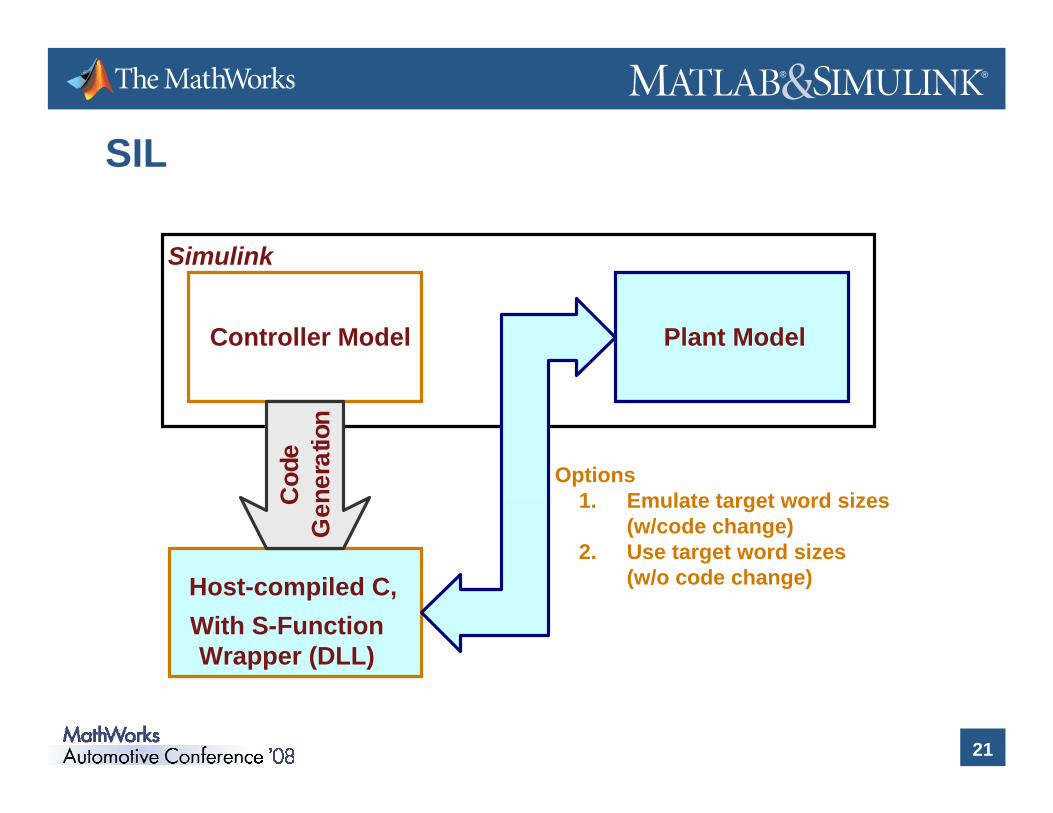
SIL
Simulink
Plant Model
Host-compiled C,With S-Function Wrapper (DLL)
Controller Model
Cod
eG
ener
ati o
n
Options1. Emulate target word sizes
(w/code change) 2. Use target word sizes
(w/o code change)
22
® ®
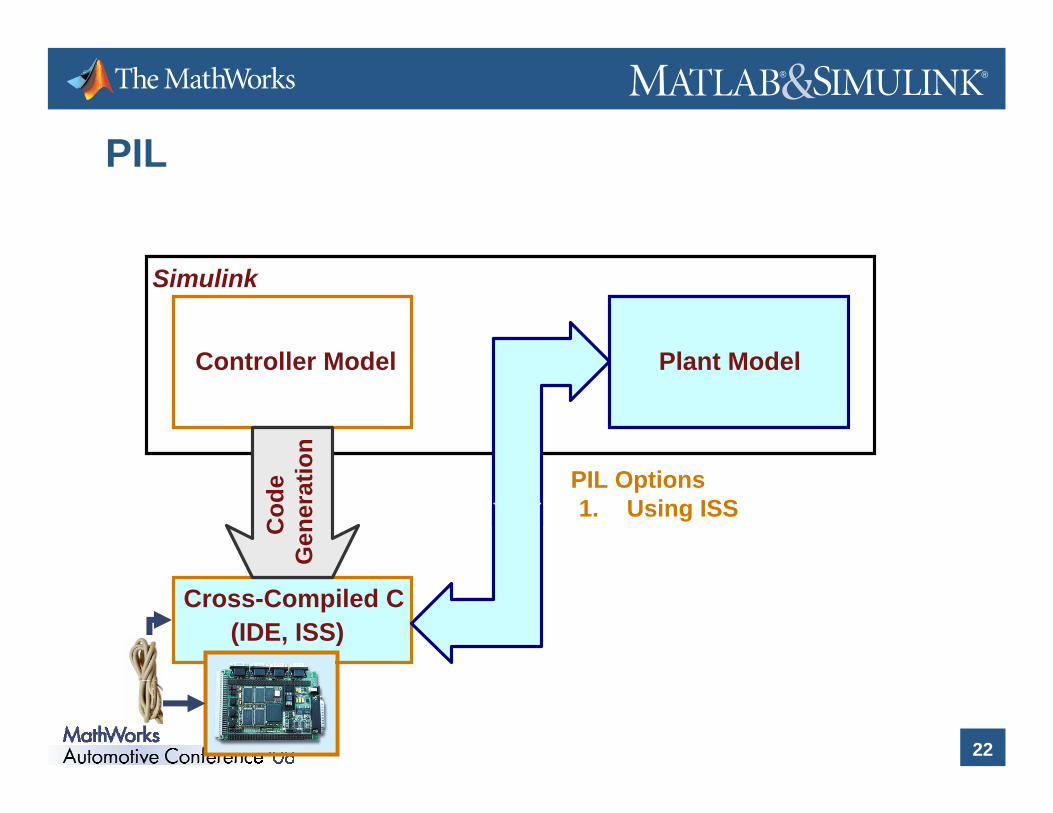
PIL
Simulink
Plant Model
Cross-Compiled C(IDE, ISS)
Controller Model
Cod
e G
ener
atio
n
PIL Options1. Using ISS2. To HW (via IDE)3. Direct to HW
23
® ®
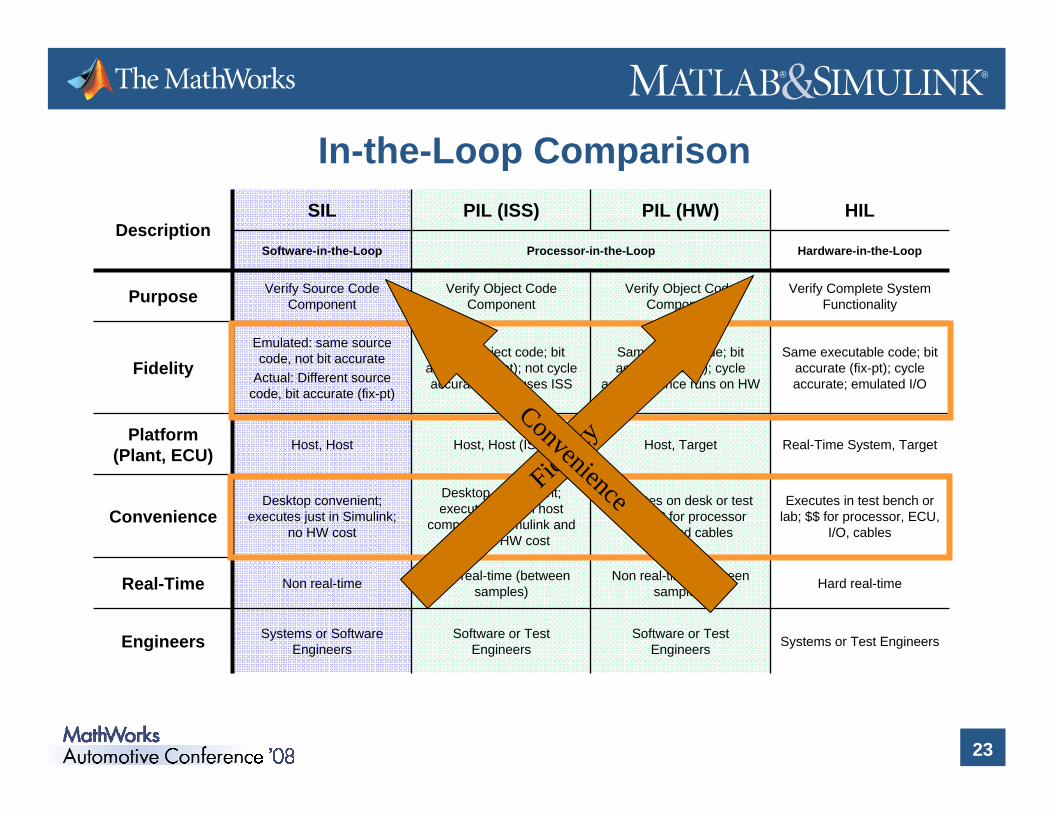
In-the-Loop Comparison
Software-in-the-Loop
HILPIL (HW)PIL (ISS)Description
Executes in test bench or lab; $$ for processor, ECU,
I/O, cables
Executes on desk or test bench; $ for processor
board and cables
Desktop convenient; executes just on host
computer w/Simulink and ISS; no HW cost
Desktop convenient; executes just in Simulink;
no HW costConvenience
Software or Test Engineers
Non real-time (between samples)
Host, Host (ISS)
Same object code; bit accurate (fix-pt); not cycle accurate since uses ISS
Verify Object Code Component
Processor-in-the-Loop
Verify Complete System Functionality
Verify Object Code Component
Verify Source Code ComponentPurpose
Systems or Test EngineersSoftware or Test Engineers
Systems or Software EngineersEngineers
Hard real-timeNon real-time (between samples)Non real-timeReal-Time
Real-Time System, Target Host, TargetHost, HostPlatform (Plant, ECU)
Same executable code; bit accurate (fix-pt); cycle accurate; emulated I/O
Same object code; bit accurate (fix-pt); cycle
accurate since runs on HW
Emulated: same source code, not bit accurate
Actual: Different source code, bit accurate (fix-pt)
Fidelity
Hardware-in-the-Loop
SIL
Fidelity
Convenience
24
® ®
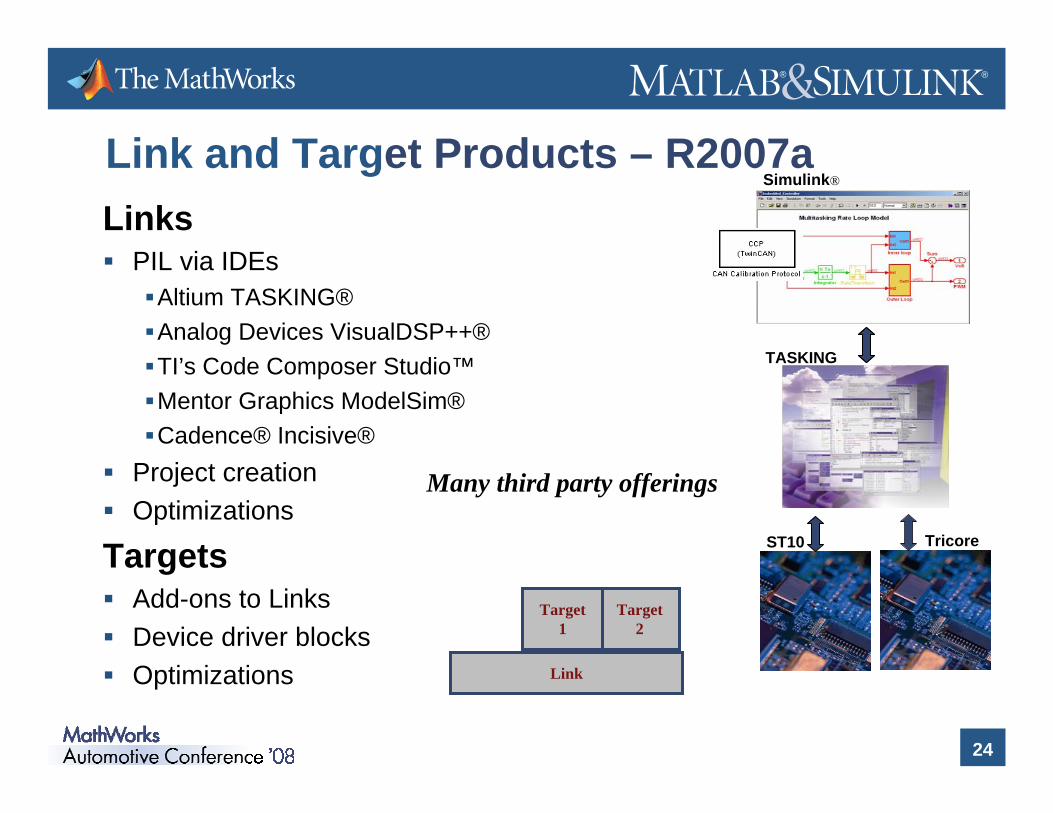
Link and Target Products – R2007aLinks
PIL via IDEsAltium TASKING®Analog Devices VisualDSP++®TI’s Code Composer Studio™Mentor Graphics ModelSim®Cadence® Incisive®
Project creation Optimizations
TargetsAdd-ons to LinksDevice driver blocks Optimizations
TASKING
Simulink®
Target 2
Tricore
Link
ST10
Target 1
Many third party offerings
25
® ®
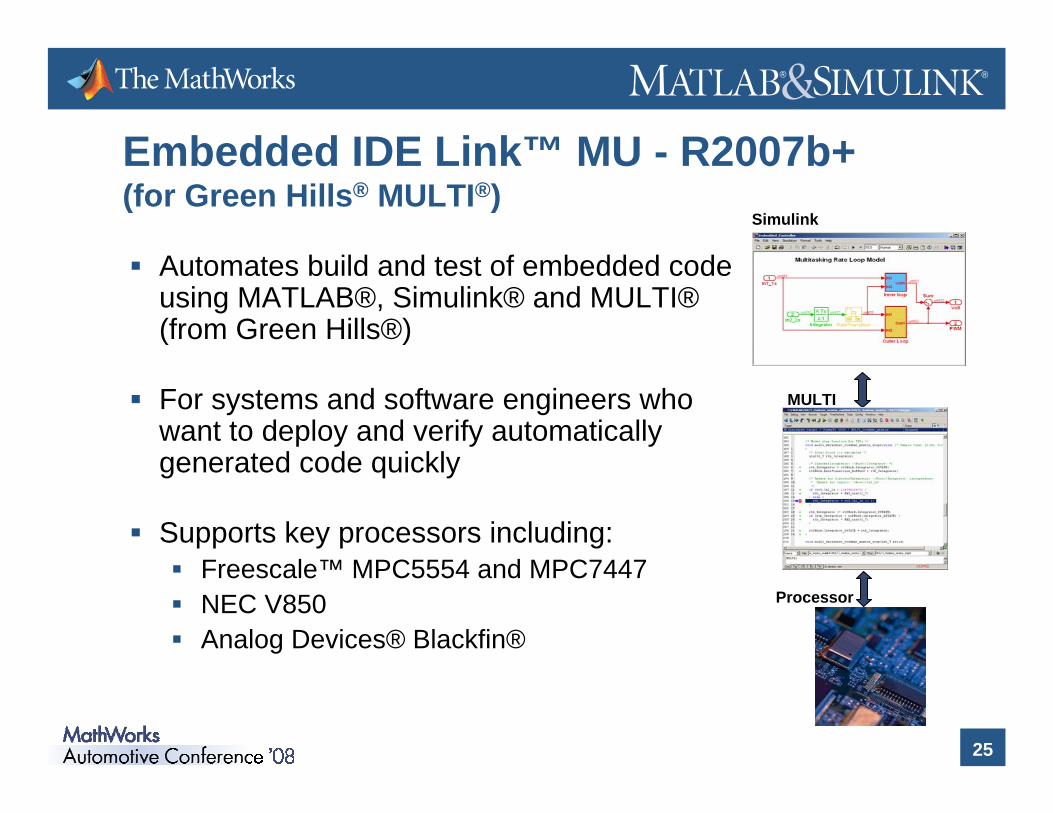
Embedded IDE Link™ MU - R2007b+(for Green Hills® MULTI®)
Automates build and test of embedded code using MATLAB®, Simulink® and MULTI®(from Green Hills®)
For systems and software engineers who want to deploy and verify automatically generated code quickly
Supports key processors including:Freescale™ MPC5554 and MPC7447NEC V850 Analog Devices® Blackfin®
Simulink
MULTI
Processor
26
® ®
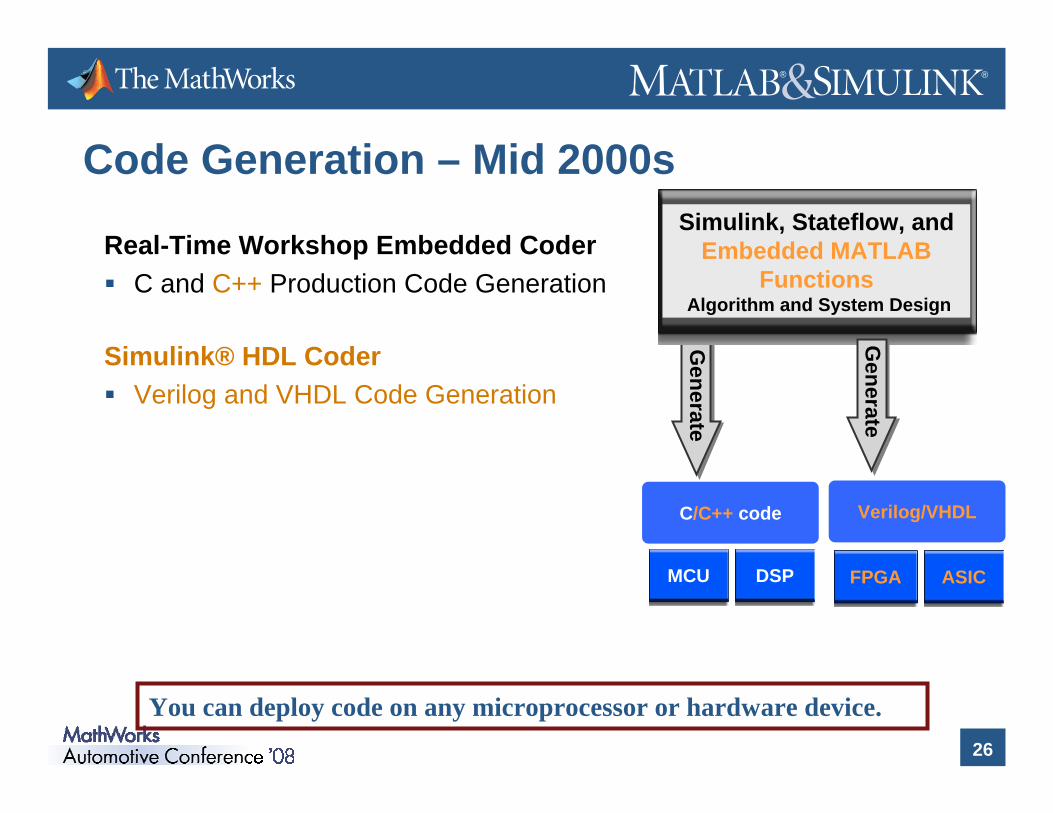
Code Generation – Mid 2000s
Real-Time Workshop Embedded Coder C and C++ Production Code Generation
Simulink® HDL CoderVerilog and VHDL Code Generation
C/C++ code
Generate
Generate
Simulink, Stateflow, and Embedded MATLAB
FunctionsAlgorithm and System Design
MCU DSP FPGA ASIC
Verilog/VHDL
Generate
Generate
You can deploy code on any microprocessor or hardware device.
27
® ®
Code Generation – Mid 2000s
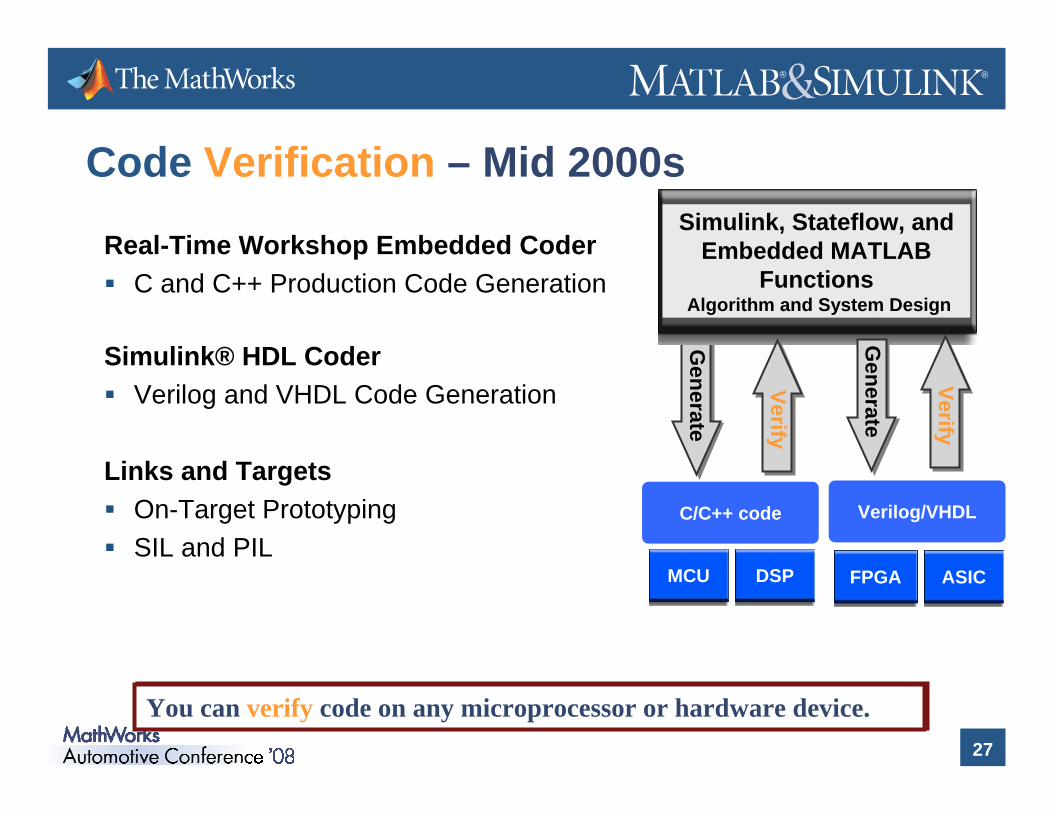
Real-Time Workshop Embedded Coder C and C++ Production Code Generation
Simulink® HDL CoderVerilog and VHDL Code Generation
Links and TargetsOn-Target PrototypingSIL and PIL
C/C++ code
Generate
Generate
Simulink, Stateflow, and Embedded MATLAB
FunctionsAlgorithm and System Design
MCU DSP FPGA ASIC
Verilog/VHDL
Generate
Generate
You can deploy code on any microprocessor or hardware device.
VerifyVerify
Code Verification – Mid 2000s
VerifyVerify
You can verify code on any microprocessor or hardware device.

28
® ®
Demo
PIL Testing
29
® ®
Simulation is not the only way to do Verification and Validation
30
® ®
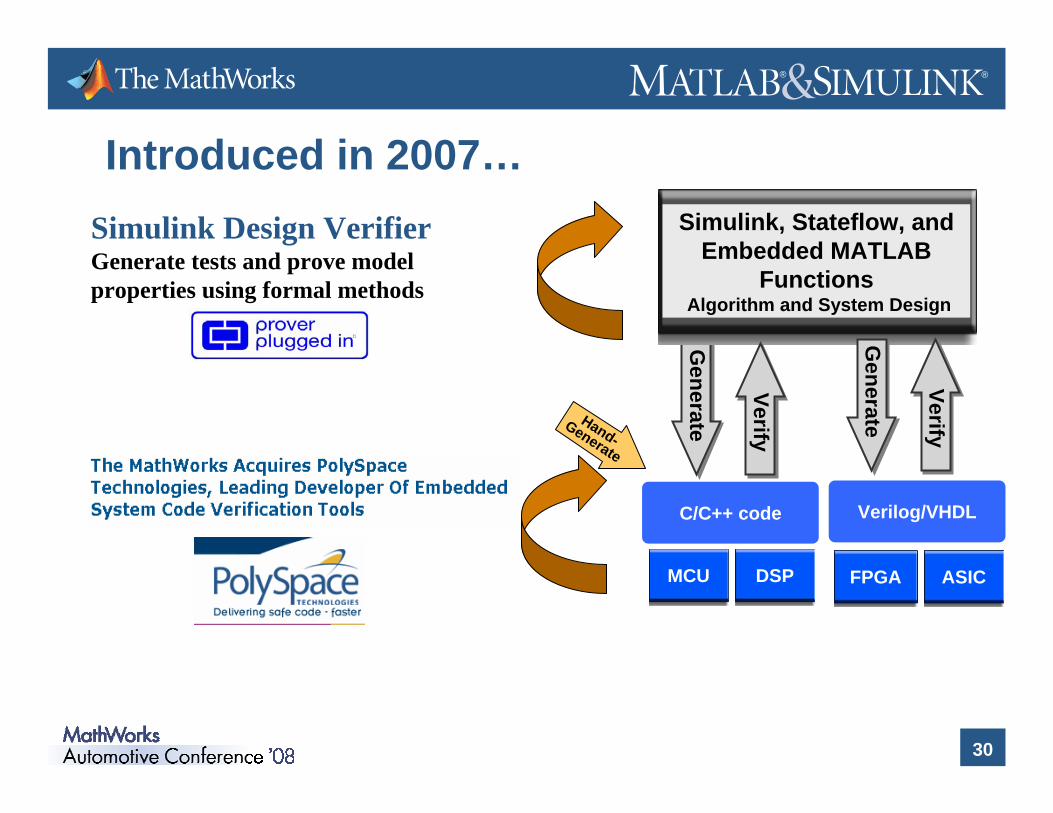
C/C++ code
Generate
Generate
Simulink, Stateflow, and Embedded MATLAB
FunctionsAlgorithm and System Design
VerifyVerify
MCU DSP FPGA ASIC
Verilog/VHDL
Generate
Generate
VerifyVerify
Simulink Design VerifierGenerate tests and prove model properties using formal methods
Introduced in 2007…
Hand-Generate
31
® ®
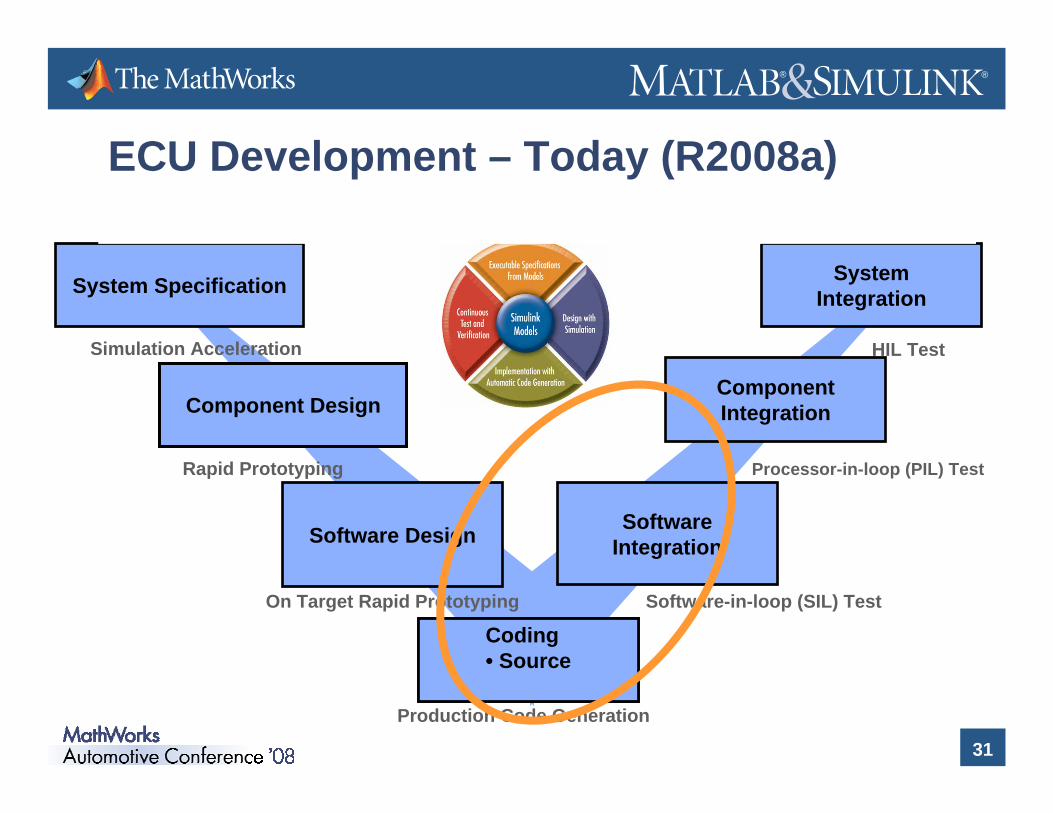
Component Design
Software Design
Coding• Source• Object
SoftwareIntegration
SystemIntegration
Simulation Acceleration
Rapid Prototyping
On Target Rapid Prototyping Software-in-loop (SIL) Test
Processor-in-loop (PIL) Test
HIL Test
Production Code Generation
Using Model-Based Design with Automatic Code GenerationECU Development – 2005
System Specification
Coding• Source• Object
ComponentIntegration
ECU Development – Today (R2008a)

32
® ®
Agenda
PCG Historical Review1990s (Circa Release 11)2000s (Circa Release 14)Today (R2007a to 2008a)
New features and trendsExecutable SpecificationDetailed DesignCode Generation and IntegrationStandards and Certification
33
® ®
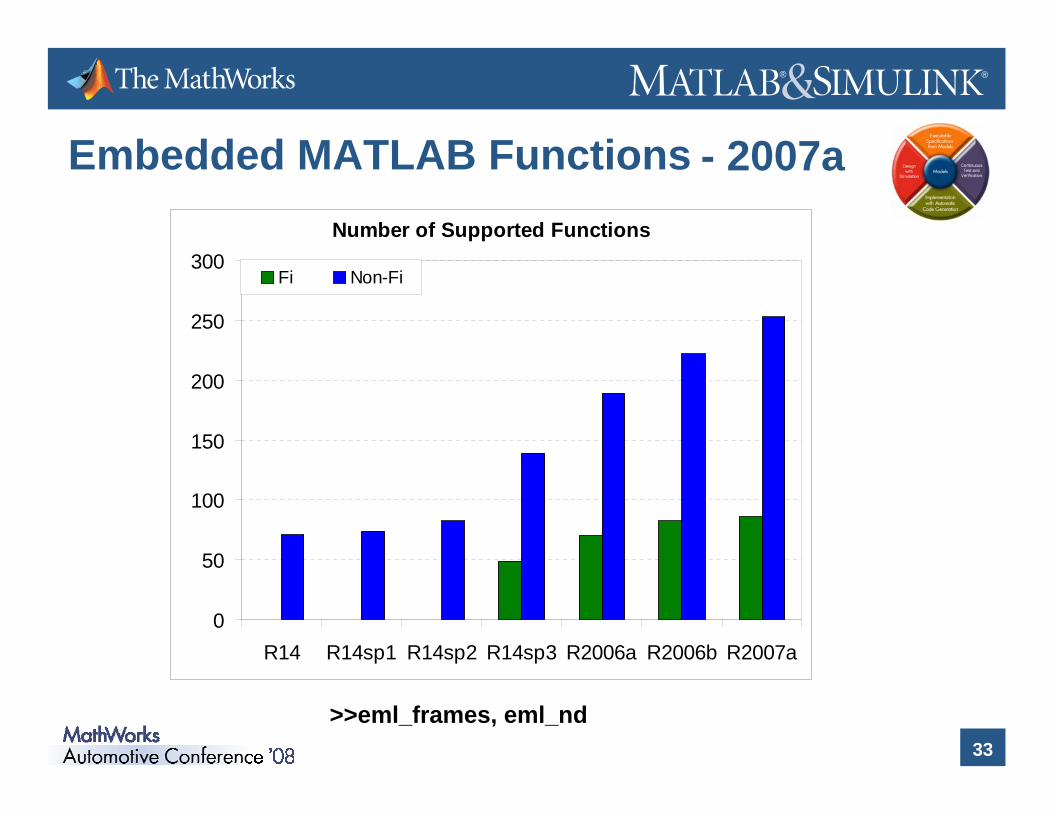
Embedded MATLAB Functions – R14
>>eml_frames, eml_nd
- 2007aNumber of Supported Functions
0
50
100
150
200
250
300
R14 R14sp1 R14sp2 R14sp3 R2006a R2006b R2007a
Fi Non-Fi

34
® ®
Embedded MATLAB™ Improvements – R2007b
Generate C using emlc in MATLAB®
Requires Real-Time Workshop®
m-files on path supported for Embedded MATLAB in Simulink® and Stateflow®

35
® ®
Agenda
PCG Historical Review1990s (Circa Release 11)2000s (Circa Release 14)Today (R2008a)
New featuresExecutable SpecificationDetailed DesignCode Generation and IntegrationStandards and Certification

36
® ®
Fixed Point Tool – 2006bIncludes:
Data type overrideAutomated scalingOver/under flow detectionFixed vs. float plots
>>fxpdemo_feedback
2007a
37
® ®
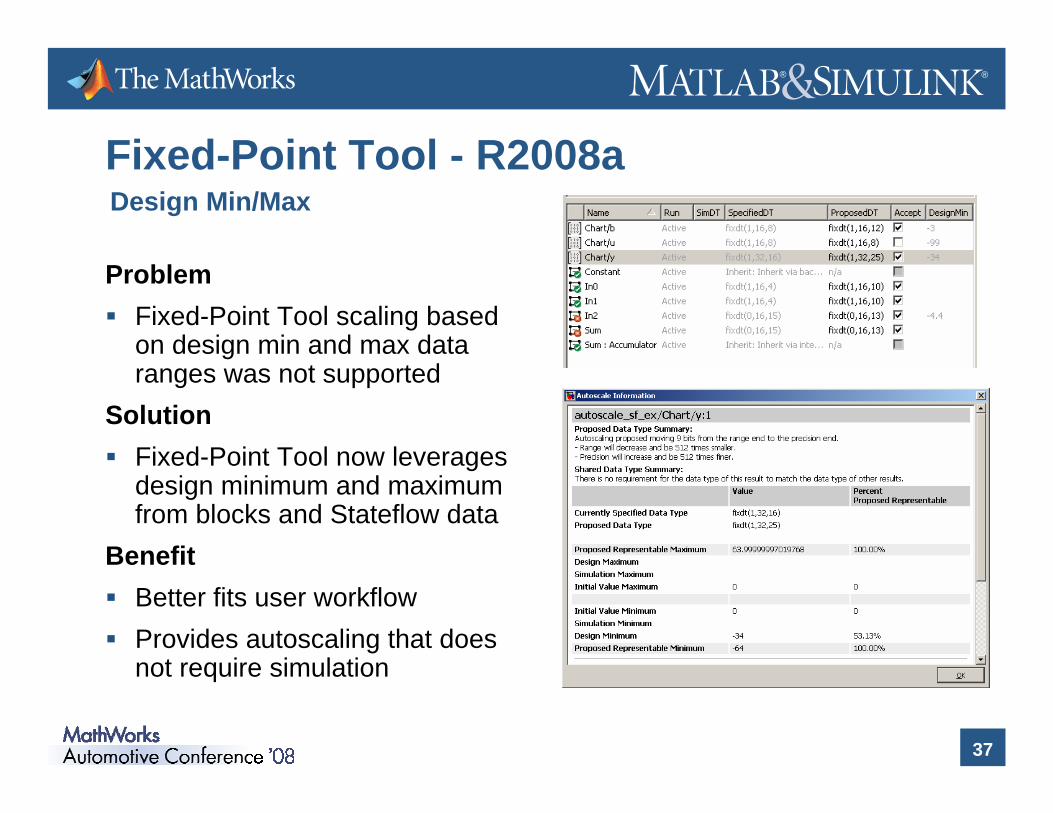
Fixed-Point Tool - R2008a
ProblemFixed-Point Tool scaling based on design min and max data ranges was not supported
SolutionFixed-Point Tool now leverages design minimum and maximum from blocks and Stateflow data
BenefitBetter fits user workflowProvides autoscaling that does not require simulation
Design Min/Max
38
® ®
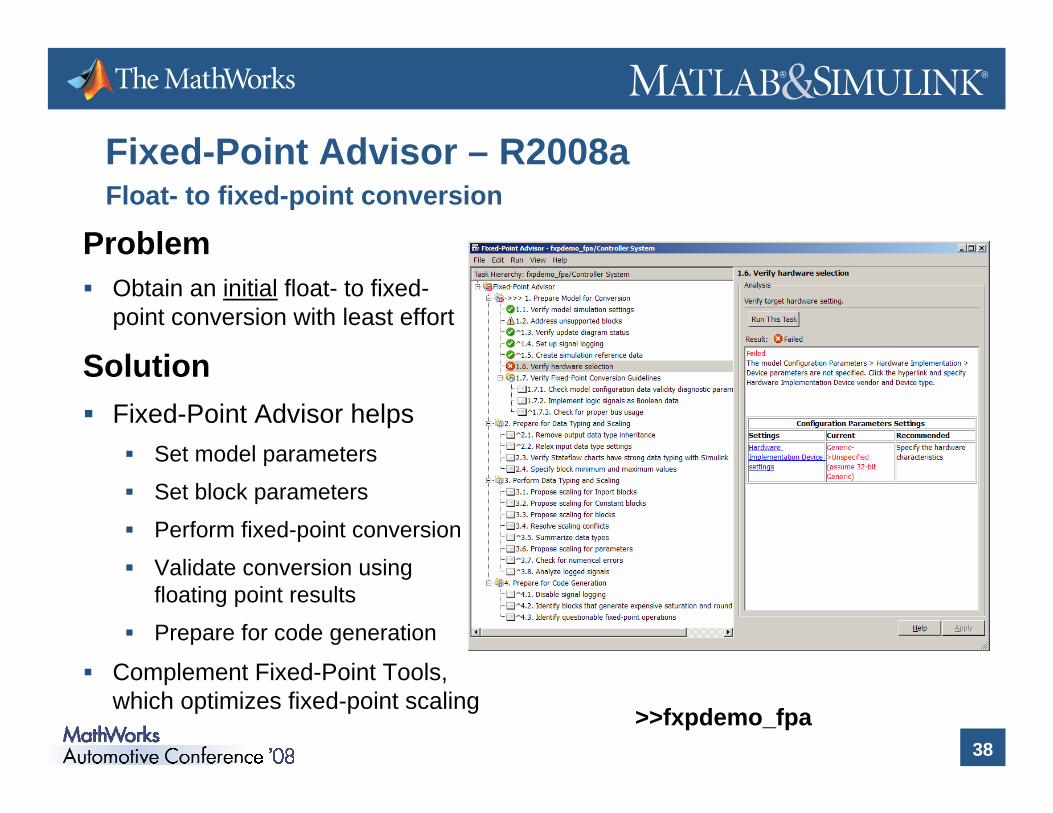
Fixed-Point Advisor – R2008a
ProblemObtain an initial float- to fixed-point conversion with least effort
SolutionFixed-Point Advisor helps
Set model parameters
Set block parameters
Perform fixed-point conversion
Validate conversion using floating point results
Prepare for code generation
Complement Fixed-Point Tools, which optimizes fixed-point scaling
Float- to fixed-point conversion
>>fxpdemo_fpa
39
® ®
Demo
Fixed Point Advisor

40
® ®
Agenda
PCG Historical Review1990s (Circa Release 11)2000s (Circa Release 14)Today (R2008a)
New featuresExecutable SpecificationDetailed DesignCode Generation and IntegrationStandards and Certification

41
® ®
Wide Signals (for-loops)for
for
for
real_T rtb_Switch[10]
for
real_T rtb_Switch[10]
real_T tmpfor
Code Efficiency – R13- R14SP2- R2007a
42
® ®
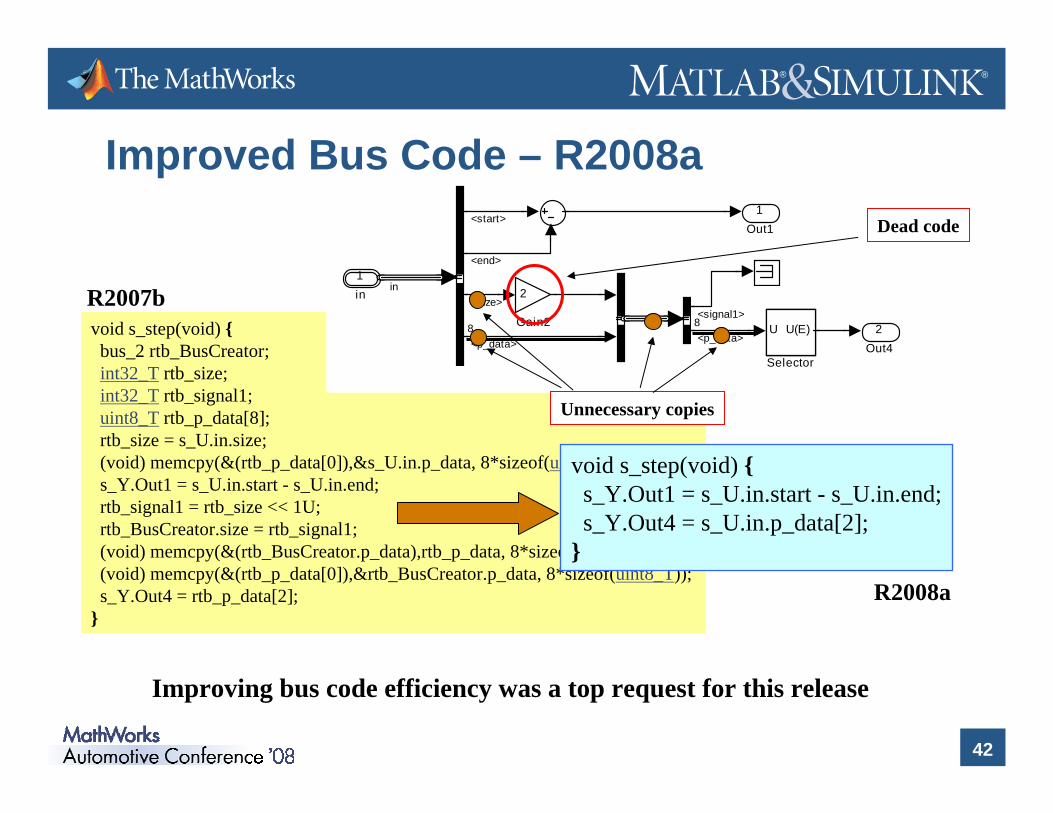
void s_step(void) {bus_2 rtb_BusCreator; int32_T rtb_size; int32_T rtb_signal1;uint8_T rtb_p_data[8]; rtb_size = s_U.in.size; (void) memcpy(&(rtb_p_data[0]),&s_U.in.p_data, 8*sizeof(uint8_T)); s_Y.Out1 = s_U.in.start - s_U.in.end; rtb_signal1 = rtb_size << 1U; rtb_BusCreator.size = rtb_signal1; (void) memcpy(&(rtb_BusCreator.p_data),rtb_p_data, 8*sizeof(uint8_T)); (void) memcpy(&(rtb_p_data[0]),&rtb_BusCreator.p_data, 8*sizeof(uint8_T)); s_Y.Out4 = rtb_p_data[2];
}
Improved Bus Code – R2008a
R2007b
void s_step(void) {s_Y.Out1 = s_U.in.start - s_U.in.end;s_Y.Out4 = s_U.in.p_data[2];
}
R2008a
Improving bus code efficiency was a top request for this release
2Out4
1Out1
U U(E)
Selector
2
Gain2
1in
in
<start>
<end>
8<p_data>
<size><signal1>
8<p_data>
Unnecessary copies
Dead code

43
® ®
Coder Infrastructure Circa 1999
TLC
C, makefiles
Stateflow IR
Stateflow
Simulink
Simulink IR
IR – Intermediate RepresentationTLC – Template Language Compiler
MATLAB
TLC-based Interfaces(S-Functions, System
Targets (e.g. GRT, ERT))
Deployment Support Only

44
® ®
Coder Infrastructure 2008 - Unified for all domains, highly efficient, extensible
TLC
StateflowEmbedded MATLAB
C, C++VHDL, VerilogMakfiles, Projects
Unified IR
SimscapeLegacy Code Tool
Simulink
S-functions
Analysis/Transform
Analysis/Transform
TLC-based Interfaces(e.g., System Targets, Code Templates, …)
IR-based Interfaces(e.g., BuildInfo, TargetFunction Library, …)
Multiple IR analyses and optimizations
Cross product optimizations
Simulink Design Verifier
45
® ®
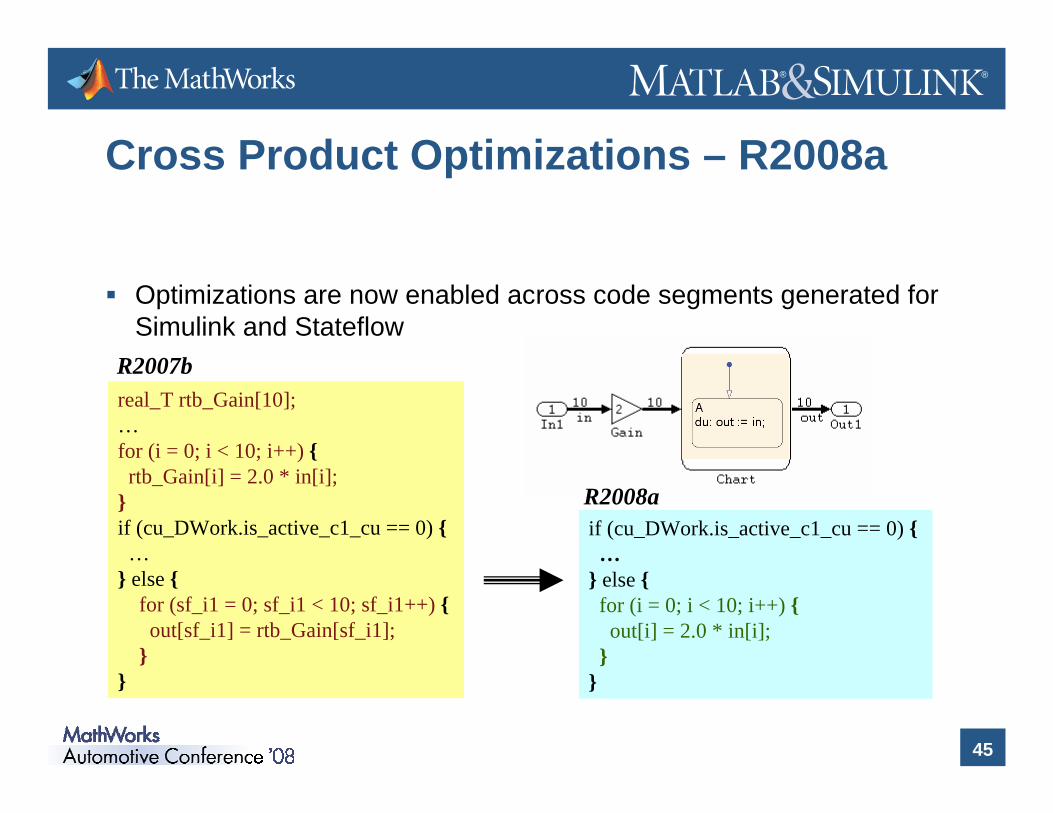
Cross Product Optimizations – R2008a
Optimizations are now enabled across code segments generated forSimulink and Stateflow
real_T rtb_Gain[10]; …for (i = 0; i < 10; i++) {
rtb_Gain[i] = 2.0 * in[i]; }if (cu_DWork.is_active_c1_cu == 0) {
…} else {
for (sf_i1 = 0; sf_i1 < 10; sf_i1++) {out[sf_i1] = rtb_Gain[sf_i1];
}}
R2007b
if (cu_DWork.is_active_c1_cu == 0) {…
} else {for (i = 0; i < 10; i++) {out[i] = 2.0 * in[i];
}}
R2008a

46
® ®
Target Specific Optimizations – R2007b
int32_T TI_C6000_s32_add_s32_s32_sat(int32_T a, int32_T b){
return _sadd(a, b);}
int32_T tricore_add_s32_s32_s32_sat(int32_T a, int32_T b){
return (__sat int)a + b;}
Target Specific Generated Code*
17.1XFixed-pt Math(int32, int32, saturated)
Tricore®
By Infineon®
C6416™DSPBy TI
Processor
6.2XFIR128-sample(int32, 50-taps, saturated)
Speedup (over
ANSI-C)
Algorithm Function
*Implemented using Target Function Libraries
Example Results

47
® ®
Agenda
PCG Historical Review1990s (Circa Release 11)2000s (Circa Release 14)Today (R2008a)
New featuresExecutable SpecificationDetailed DesignCode Generation and IntegrationStandards and Certification
48
® ®
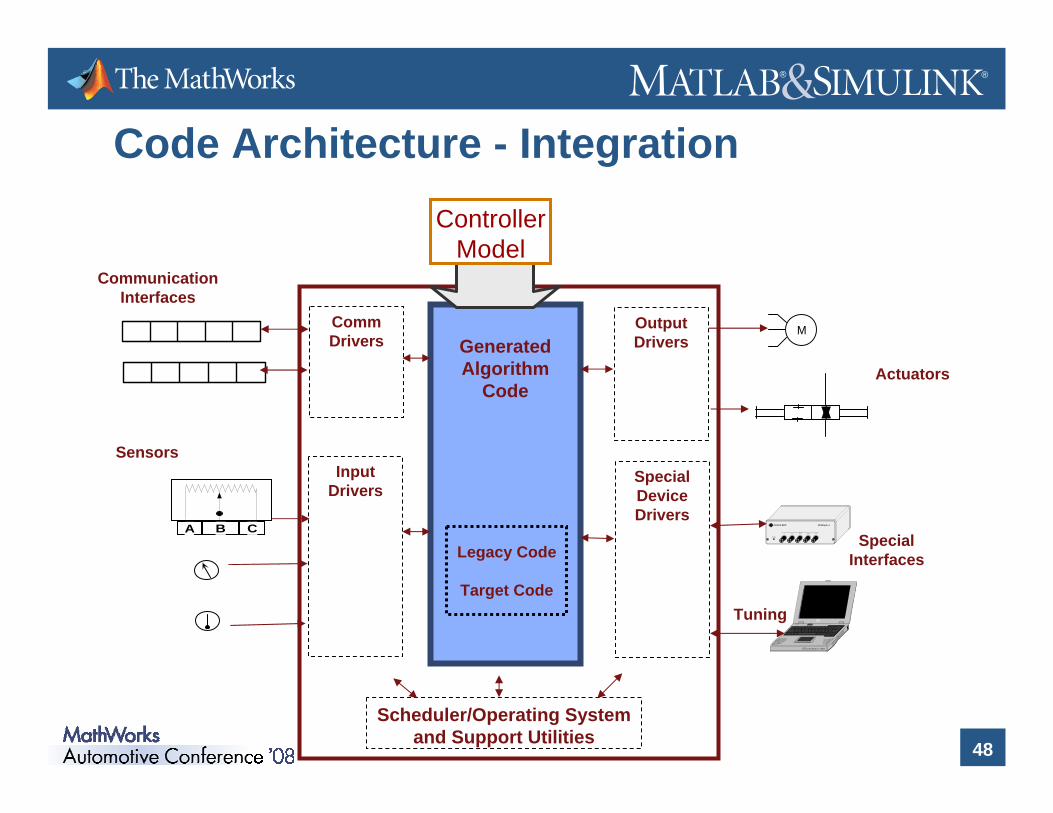
Code Architecture - Integration
A B C
M
®
INPUTBLUE GREEN RED
POWER
RGBSplit-4BLACK BOX®®
V RCS
Generated Algorithm
Code
InputDrivers
OutputDrivers
SpecialDeviceDrivers
CommDrivers
Scheduler/Operating Systemand Support Utilities
CommunicationInterfaces
Sensors
Actuators
SpecialInterfaces
Tuning
Legacy Code
Target Code
Controller Model
49
® ®
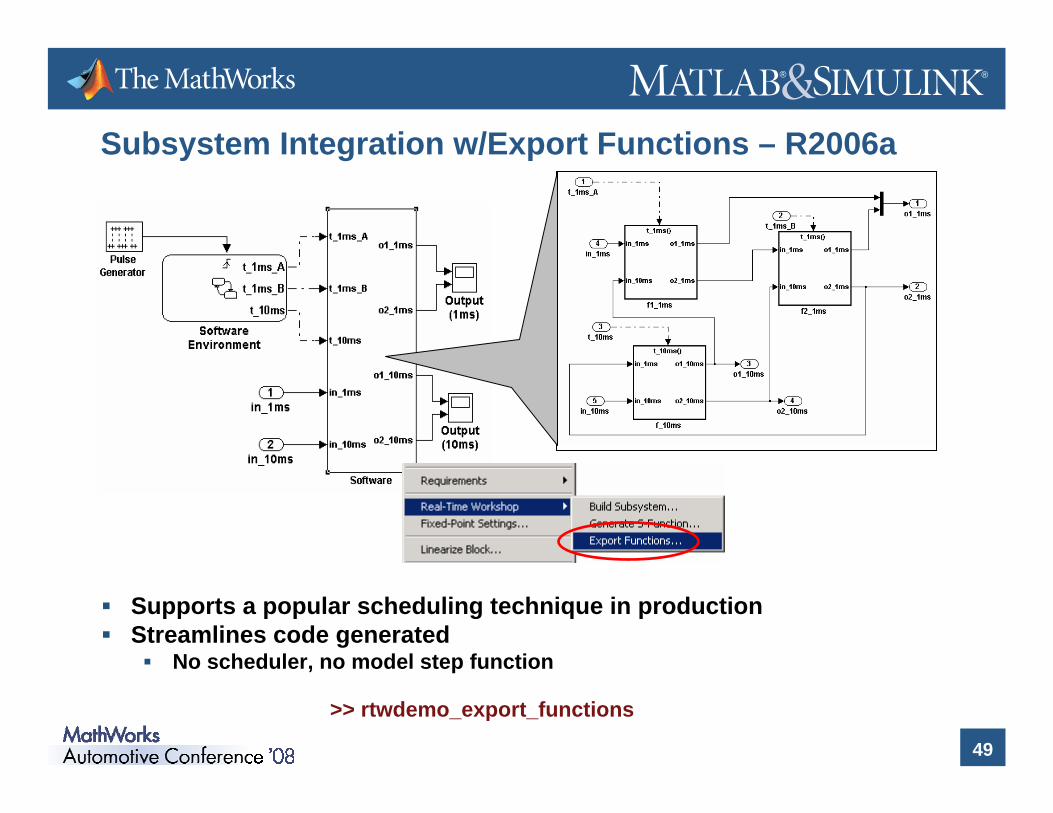
Subsystem Integration w/Export Functions – R2006a
Supports a popular scheduling technique in productionStreamlines code generated
No scheduler, no model step function
>> rtwdemo_export_functions

50
® ®
dependent models rebuilt
model changed and rebuilt
Model Reference – Introduced in Release 14
Incremental code generation is supported via Model ReferenceWhen a model is changed, only the dependent model regenerate their codeNormal mode model reference in R2007b
Only rebuilt if interface is changed (R2008a)
51
® ®
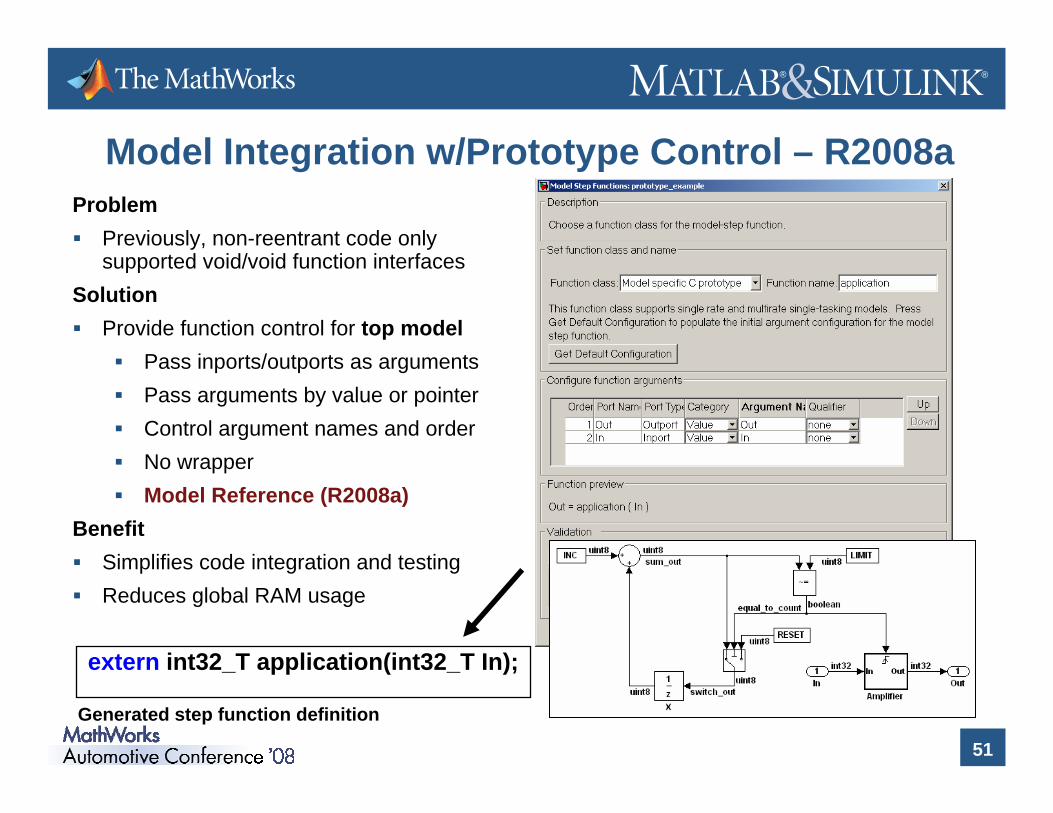
Model Integration w/Prototype Control – R2008aProblem
Previously, non-reentrant code only supported void/void function interfaces
SolutionProvide function control for top model
Pass inports/outports as argumentsPass arguments by value or pointerControl argument names and orderNo wrapperModel Reference (R2008a)
BenefitSimplifies code integration and testingReduces global RAM usage
extern int32_T application(int32_T In);
Generated step function definition
52
® ®
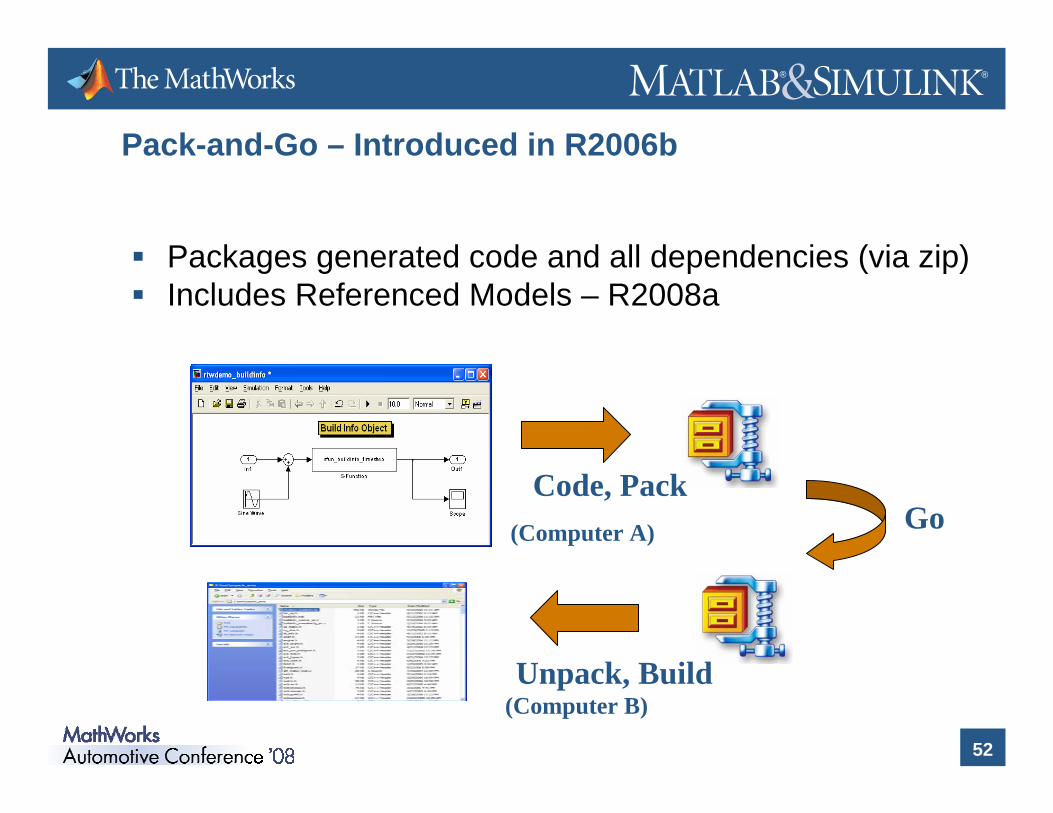
Pack-and-Go – Introduced in R2006b
Packages generated code and all dependencies (via zip)Includes Referenced Models – R2008a
Code, PackGo
Unpack, Build
(Computer A)
(Computer B)

53
® ®
Legacy Code Tool – Introduced in R2006bIntegrates external code for simulation and code generation (e.g., legacy lookup tables)Earlier version of LCT on MATLAB Central
Registration File
Simulation ModelGenerated Code
>> sldemo_lct_lut
54
® ®
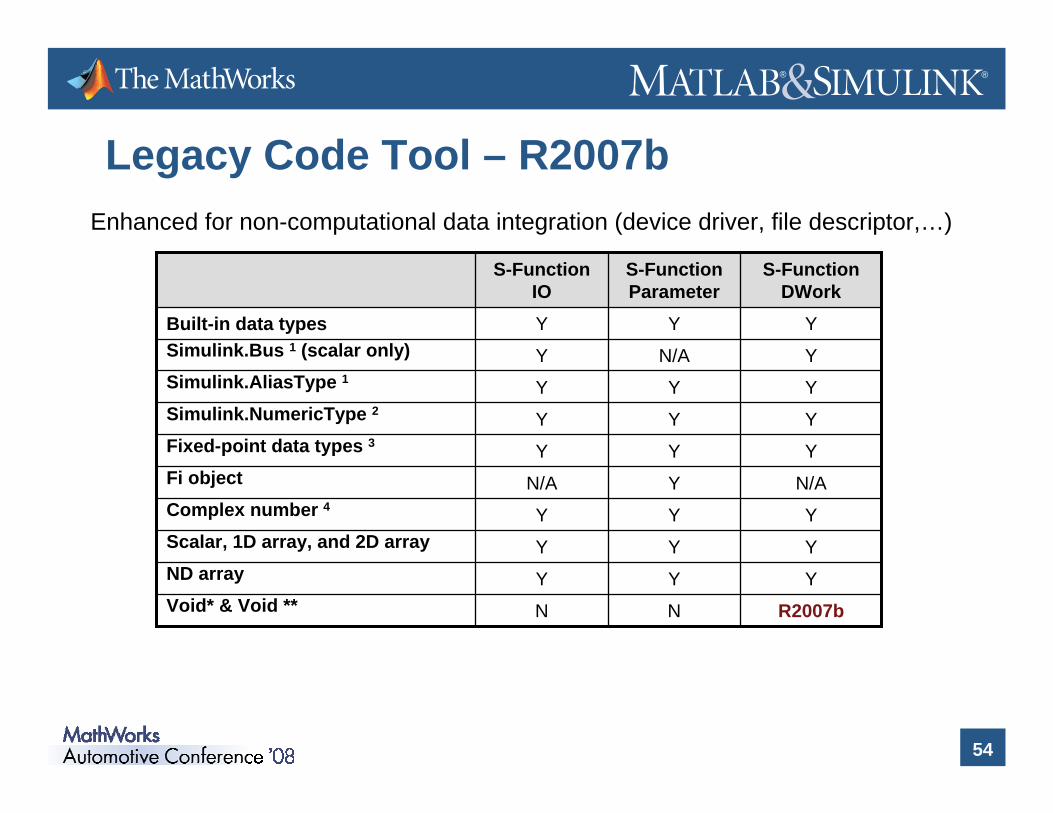
Legacy Code Tool – R2007b
YYYND array
R2007bNNVoid* & Void **
YYYScalar, 1D array, and 2D arrayYYYComplex number 4
N/AYN/AFi objectYYYFixed-point data types 3YYYSimulink.NumericType 2
YYYSimulink.AliasType 1
YN/AYSimulink.Bus 1 (scalar only)YYYBuilt-in data types
S-FunctionDWork
S-FunctionParameter
S-Function IO
Enhanced for non-computational data integration (device driver, file descriptor,…)
55
® ®
Agenda
PCG Historical Review1990s (Circa Release 11)2000s (Circa Release 14)Today (R2008a)
New featuresExecutable SpecificationDetailed DesignCode Generation and IntegrationCertification and Standards
56
® ®
Standards and Certification
AUTOSAR (previously discussed)IEC 61508 Safety Guidelines (discussed tomorrow)MAAB Model Guidelines (v2)MISRA C® Code Guidelines (2004)

57
® ®
Model Standards Checks in Simulink Verification and Validation™
MAAB v2 checks in R2007b
IEC 61508 checks in R2008a
58
® ®
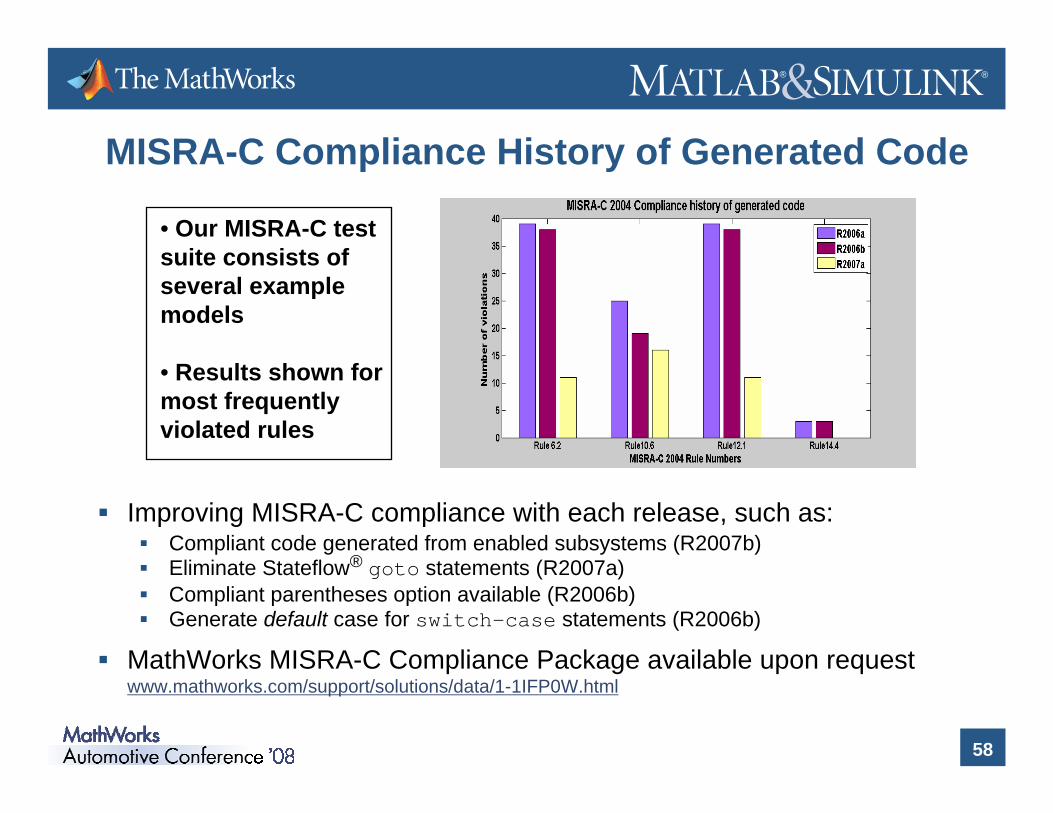
MISRA-C Compliance History of Generated Code
• Our MISRA-C test suite consists of several example models
• Results shown for most frequentlyviolated rules
Improving MISRA-C compliance with each release, such as:Compliant code generated from enabled subsystems (R2007b)Eliminate Stateflow® goto statements (R2007a)Compliant parentheses option available (R2006b) Generate default case for switch-case statements (R2006b)
MathWorks MISRA-C Compliance Package available upon request www.mathworks.com/support/solutions/data/1-1IFP0W.html

59
® ®
Stateflow and Embedded MATLAB Traceability – R2008a
ProblemNo automated way to trace Stateflow chart and Embedded MATLAB code to generated code
SolutionGenerate comments that automatically link Stateflowobjects and Embedded MATLAB functions to the generated codeAllow model-to-code and code-to-model bidirectional navigation
BenefitBidirectional traceability helps code reviews, code verification, and software certification
60
® ®
Agenda
PCG Historical Review1990s (Circa Release 11)2000s (Circa Release 14)Today (R2008a)
New FeaturesExecutable SpecificationDetailed DesignCode Generation and IntegrationCertification and Standards
The Future?
61
® ®
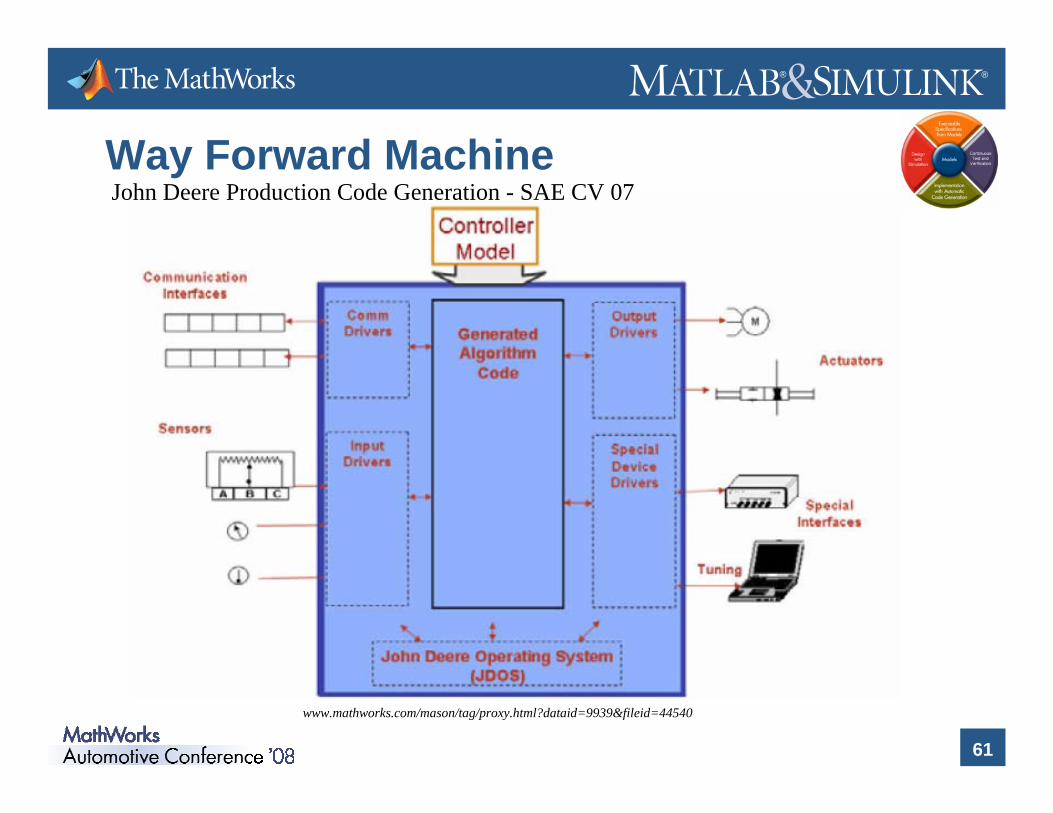
www.mathworks.com/mason/tag/proxy.html?dataid=9939&fileid=44540
John Deere Production Code Generation - SAE CV 07 Way Forward Machine

62
® ®
Way Forward Machine
Christopher Davey, Ford Motor Co, et al.
20 MLOCin 2013
63
® ®
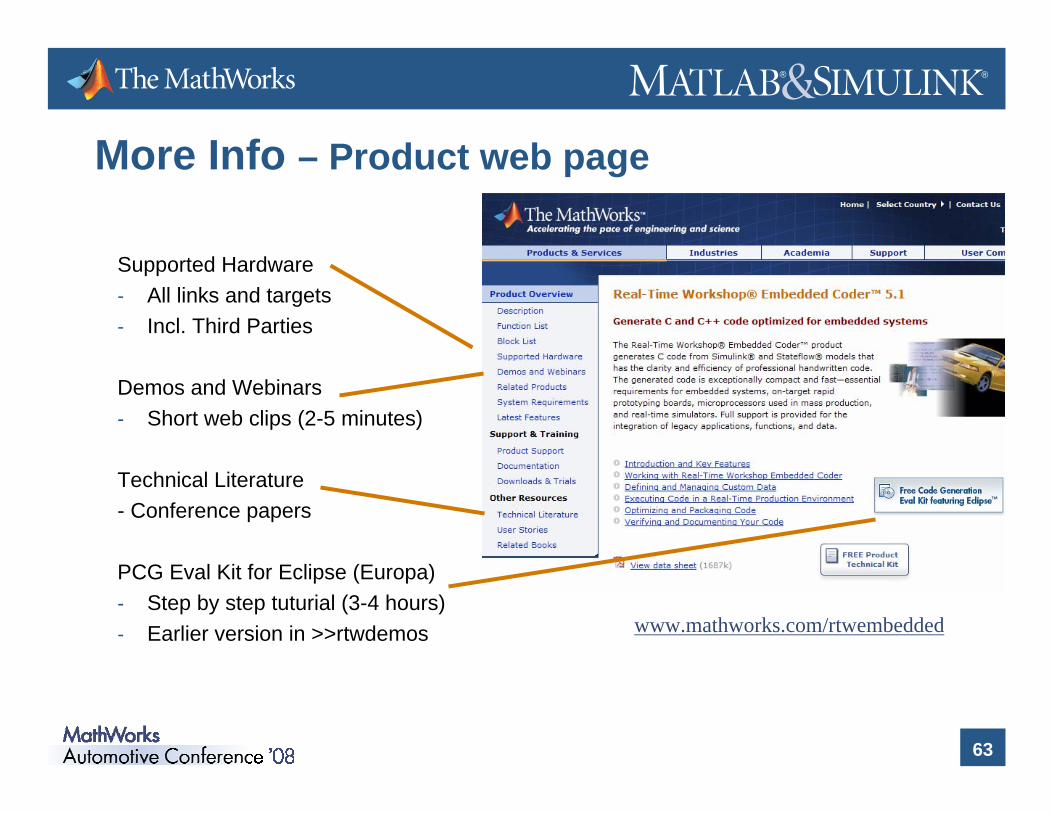
More Info – Product web page
Supported Hardware- All links and targets- Incl. Third Parties
Demos and Webinars- Short web clips (2-5 minutes)
Technical Literature- Conference papers
PCG Eval Kit for Eclipse (Europa)- Step by step tuturial (3-4 hours)- Earlier version in >>rtwdemos www.mathworks.com/rtwembedded
64
® ®
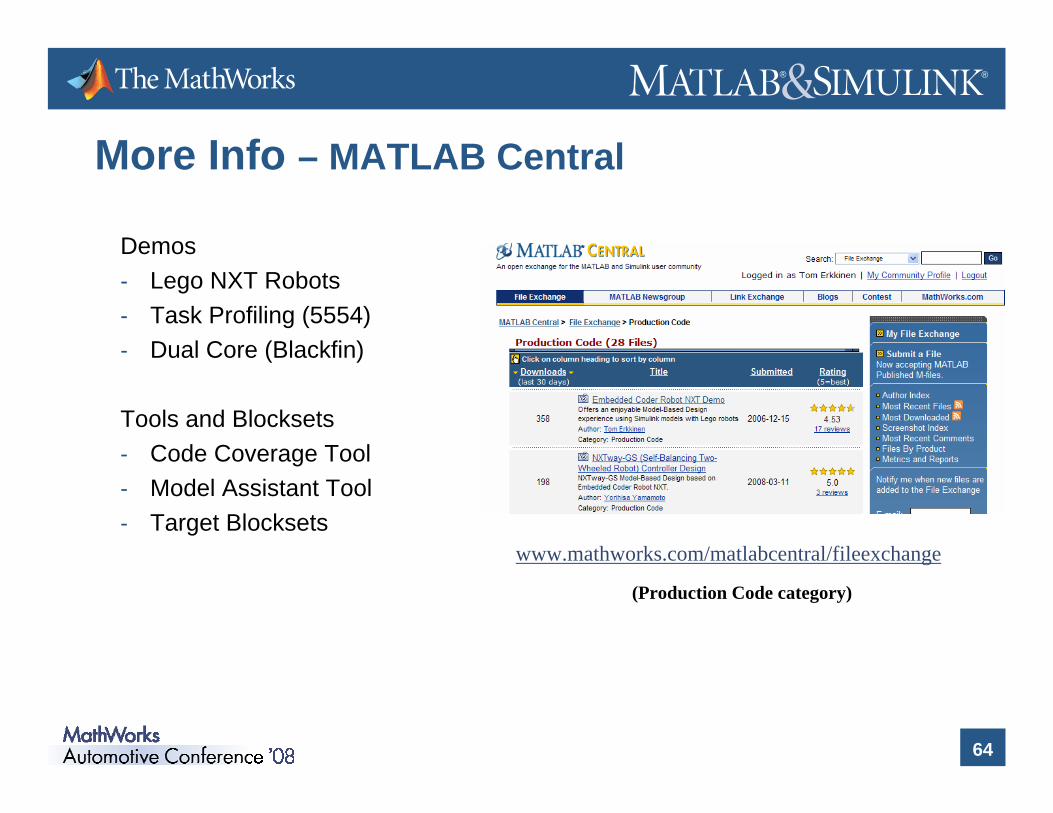
More Info – MATLAB Central
Demos- Lego NXT Robots- Task Profiling (5554)- Dual Core (Blackfin)
Tools and Blocksets- Code Coverage Tool- Model Assistant Tool- Target Blocksets
www.mathworks.com/matlabcentral/fileexchange
(Production Code category)
65
® ®
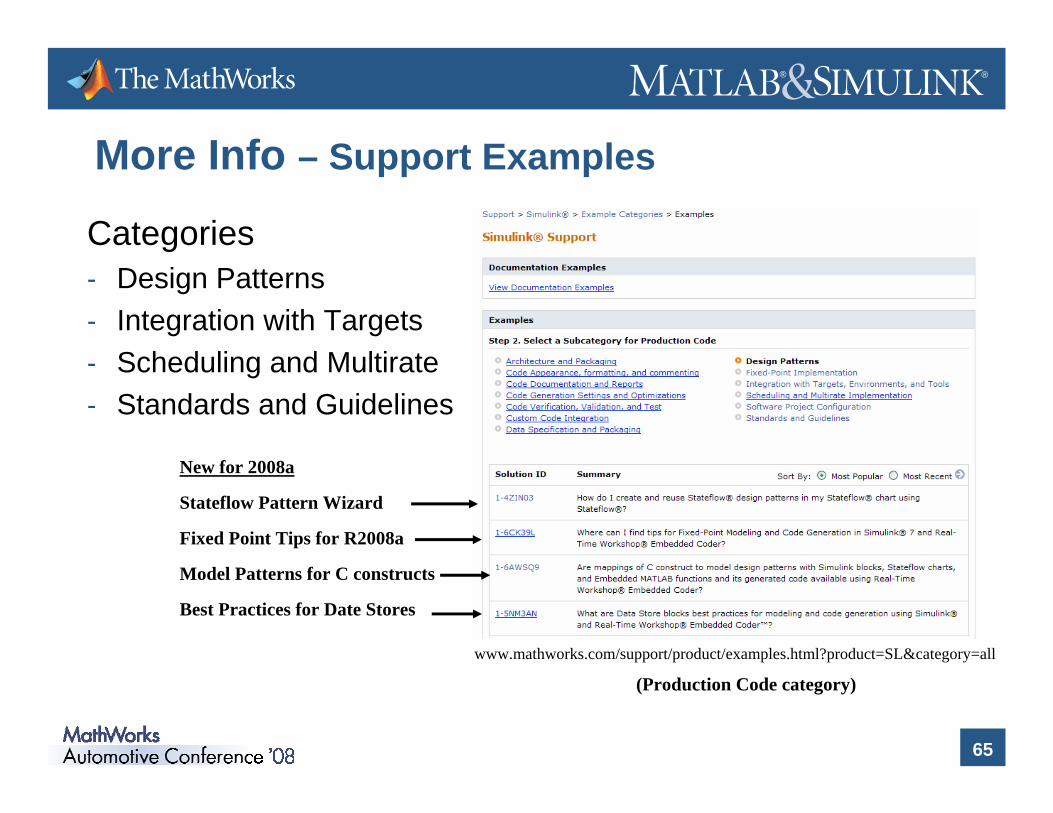
More Info – Support Examples
Categories- Design Patterns- Integration with Targets- Scheduling and Multirate- Standards and Guidelines
www.mathworks.com/support/product/examples.html?product=SL&category=all
(Production Code category)
New for 2008a
Stateflow Pattern Wizard
Fixed Point Tips for R2008a
Model Patterns for C constructs
Best Practices for Date Stores
66
® ®
We are very interested in learning about your production code needs.
Thank you!
67
® ®
One More Thing …
Are you working on or planning foran IEC 61508 project?
68
® ®
Validated by TÜV
Top Related