






Languages
Pages
Legal


P09204: Second Generation Design
Team Members:Jason JackNandini VemuriJeff HoweJohn CorletoEmily PhillipsRyan Schmitt

Build a control system to command interchangeable motor modules
Control system must be: Open-Source, Open-Architecture Modular Scalable, Programmable
Control system must be controllable by payload or Windows/Linux PC
System must be smaller than previous units
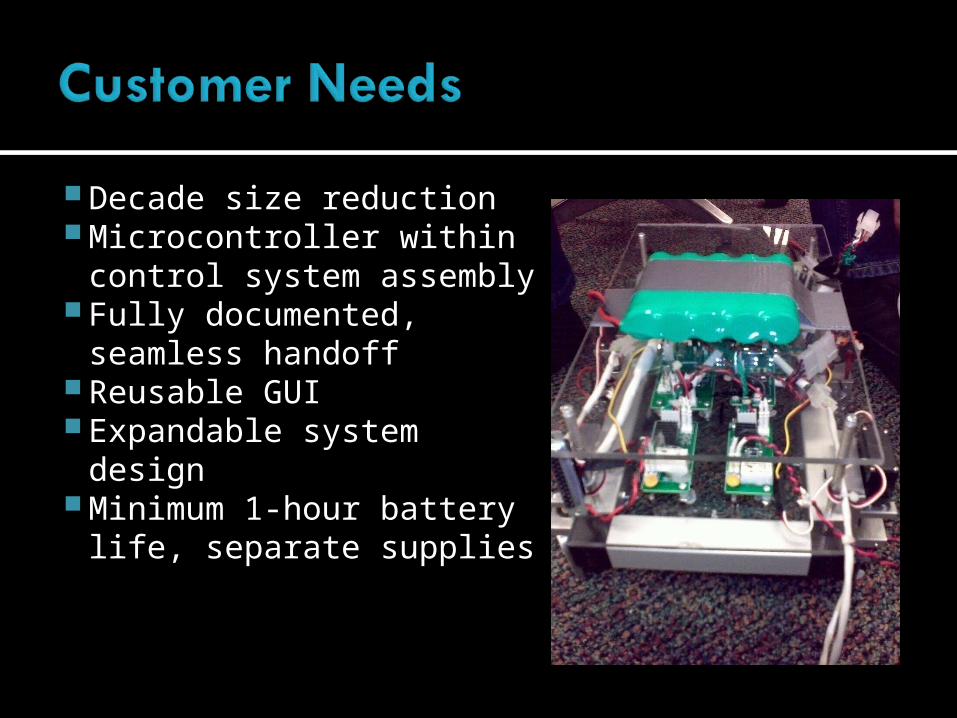
Decade size reduction Microcontroller within
control system assembly Fully documented,
seamless handoff Reusable GUI Expandable system
design Minimum 1-hour battery
life, separate supplies

Motors must be efficient, easily controlled, cheap, widely available
Battery must be smaller, lighter Power Distribution needs to be more
robust than previous teams implementation
Software Implementation must exercise all hardware capabilities
Wireless datalink must have minimum range of 100 ft.

Selection CriteriaSegmentWeight
A B C Freescale BDMicro Arduino Nano
Rating Notes Wtd Rating Notes Wtd Rating Notes WtdSpeed 5% 3 16MHz 0.15 3 16MHz 0.15 3 16MHz 0.15
Memory 20% 2 2KB 0.40 3 4KB 0.60 1 1KB 0.20Open Source 15% 1 Closed Source 0.15 3 avr-gcc 0.45 3 Open Source 0.45
IDE Flexibility 15% 1 Code Warrior 0.15 3 Use Anything 0.45 3 Use Anything 0.45Small Size 20% 1 Not Small 0.20 2 Small 0.40 3 NANO! 0.60
Existing Code Base 10% 3Expansive Libraries 0.30 3
Open Source Fully Modular Driver Base 0.30 2 Arduino Libraries 0.20
Expandable Memory 10% 3
8-bit Mem Interface 0.30 2 X-RAM Interface 0.20 1 Nothing 0.10
Experience 5% 3 CE Experience 0.15 2Easy Learning
Curve 0.10 1None have used Arduino
Architecture 0.05Total Score 1.80 2.65 2.20
Rank 1 3 2

DC/Servo DC/DC Stepper/Stepper DC/StepperCost 4 2 1 3
External Circuitry 4 1 2 3
Design ComplexitySoftware 2 3 4 1Hardware 4 1 2 3
Efficiency 3 4 1 2Research Required 1 2 4 3
Scalability 3 1 4 2
Stall TorqueDrive 1 3 4 2Steer 4 4 3 4Total: 26 21 25 23Rank: 4 1 3 2
Best WorstCell Ranks: 4 1

Microcontroller did not have the capacity to generate all necessary control signals
Stepper motor drivers had non-deterministic behavior, required excessive control signals
Crossbow Wireless had confusing, custom programming; too complex for design
Errors in PCB design post-fabrication mandated changes late in development cycle

Power Distribution – Logic and Motor Motors – DC and Servo Microcontroller – BDMicro Atmel
ATmega128 GUI – Continuous and Incremental Control Operational Software – Command Protocol PID controller – Arduino Nano Wireless – IOGear Bluetooth Serial Adapter


Single Unit: $866.50 $866.50 per unit
Lot of 10: $6021.50 $602.15 per unit
Lot of 100: $56980.37 $569.80 per unit
Lot of 1000: $558609.46 $555.61 per unit
The per unit price drops dramatically between a single unit cost and a lot of 10, however due to COTS fixed costs there is not much benefit for purchasing in larger lots than this

Merge power suppliesRedesign power supplies to use
isolated switching supplies (isolate motor spikes from logic)
Merge microcontrollersMerge DC DriversFurther research into PCB
manufacturing, reduce costsReduce cabling, merge headers

Light seeking plant carrier “Birds-eye-view” robotic Pacman game Robot “battle” competition Robot dance competition Autonomous, mobile paintball sentry
robot Software engineering project, further
GUI development Electrical engineering project, improve
electrical systems design
Top Related