







Languages
Pages
Legal


1
OperationalSpaceFramework! .. motion in contact
Whole-body Compliance!
Joint Space Control Joint Space Control
Joint Space Control
F
( )GoalV xF
( )GoalV x
T FJ
Task-Oriented Control
1 2
3 4
5 6

2
F
dynamics( )F F
x
x Fp
Task-Oriented Dynamics Unified Motion & Force Control
motion contactF F F contactF
motionF
Equations of Motion
d L LF
dt x x
with ( , ) ( , ) ( )L x x T x x V x
End-Effector Control
( )TJ q F F
1
2
T
goal p g gV k x x x x
( )GoalV xF
1
2
T
goal p g gU k x x x x
System T Vd T
Fdt x x
ˆ
goalF V VX
Passive Systems
0
goalT Vd T
dt x x
StableConservative Forces
Asymptotic Stability
is asymptotically stable if
0 ; 0TsF x for x
0s v vF k x k
ˆp g vF k x x k x p Control
s
goalT Vd T
dt x xF
a system
sFx
7 8
9 10
11 12

3
Artificial Potential Field
( ) ( , ) ( )x x x x p x F
Operational Space Dynamics
End-Effector Centrifugal and Coriolis forces
( , ) :x x
( ) :p x End-Effector Gravity forces:F End-Effector Generalized forces
( ) : x End-Effector Kinetic Energy Matrix
:x End-Effector Position andOrientation
Example2-d.o.f arm
ˆ ( )p g vF k x x k x p x
( ) ( , ) ( )x x x x p x F 1q1l
2q2l
Closed loop behavior
111*
1( ) v p gm q x k x k mx yx
122*
2( ) v p gm q y k y k my xy
* 2 *1 2 1 112 p g vm c m x m y k x x k x
* 2 *1 2 1 212 p g vm c m y m x k y y k y
( ) ( , ) ( )A q q b q q g q
Joint Space Dynamics
Centrifugal and Coriolis forces( , ) :b q q( ) :g q Gravity forces: Generalized forces
( ) :A q Kinetic Energy Matrix
:q Joint Coordinates
Lagrange Equations
( )d L L
dt q q
( ) ( , ) ( )A q q b q q g q
(( )) ,A b q qq 1
2( ): TA q qAqT
13 14
15 16
17 18

4
Equations of Motionvcii
Pci
Link i
TTotal Kinetic Energy:
1
2Lin i
T
kAqT T q
Equations of Motion
1( )
2 i i
T T Ci i C C i i iT mv v I
1
n
ii
T T
vcii
Pci
Link i
Explicit Form
Total Kinetic Energy
Equations of Motion
Generalized Coordinates q
Kinetic EnergyQuadratic Form of
Generalized Velocities
1
1(
1
2)
2 i i
nT T C
i C C i iT
ii
m v vq A q I
q
1
2Tq qT A
vcii
Pci
Link i
Explicit Form
Generalized Velocities
Equations of Motion
i ivC Jv q
1
1( )
2 i i i i
T Tv v
nT T C
i ii
m q q qJ J J JI q
Explicit Formvcii
Pci
Link i
iiC J q
1
1(
1
2)
2 i i
nT T C
i C C i iT
ii
m v vq A q I
Equations of Motionvcii
Pci
Link i
Explicit Form
1
2Tq qA
1
( )1
2 i i i i
nT T
i vi
T Cv imq J J I J qJ
1
( )i i i i
nT T C
i v v ii
A m J J J I J
( )
11 12 1
21 22 2
1 2
( )n n
n
n
n n nn
a a a
a a aA q
a a a
19 20
21 22
23 24

5
Christoffel Symbols1
( )2ijk ijk ikj jkib a a a
ij
k
a
q
2( , ) ( ) ( )b q q C q q B q qq
B
b b b
b b b
b b b
q q
q q
q qn
n n n n
n n
n n
n n n n n n n
( ) [ ]
(
( )) (
( ))
, , ,(
, , ,(
, , ,( (
q qq
L
N
MMMM
O
Q
PPPP
L
N
MMMM
O
Q
PPPP
1
2
1
21
2 2 2
2 2 2
2 2 2
1 12 1 13 1 1)
2 12 2 13 2 1)
12 13 1)
1 2
1 3
1)
C
b b b
b b b
b b b
q
q
qn n n
nn
nn
n n n nn n
( )[ ]
( ) ( )
, , ,
, , ,
, , ,
q q
L
N
MMMM
O
Q
PPPP
L
N
MMMM
O
Q
PPPP2
1 11 1 22 1
2 11 2 22 2
11 22
12
22
2
1
Gravity Vector
m2g
c2
m1g
c1
mng
cnm3g
c3
1 21 2( ( ) ( ) ( ))n
T T Tv v v ng J m g J m g J m g
Effector Equations of Motion
Non-Redundant Manipulator ; 0n m
01 2
T
mx x x x
1 2 T
nq q q q x G q
0R1nR
10n
Domain
1
,n
q i ii
D q q
x1Cq
2Cq
G
x qD G D
x qD G D
In form a complete set of configuration parameters for the manipulator.01 2, , , x mD x x x
Excluding Singularitiesand such that G is one-to-one
:qD
system of generalizedcoordinates
01 , , : mx x
Kinetic Energy
1, ( )
2TT x x x x x
Kinetic Energy Matrix0 0
( ) :m m x
25 26
27 28
29 30
6
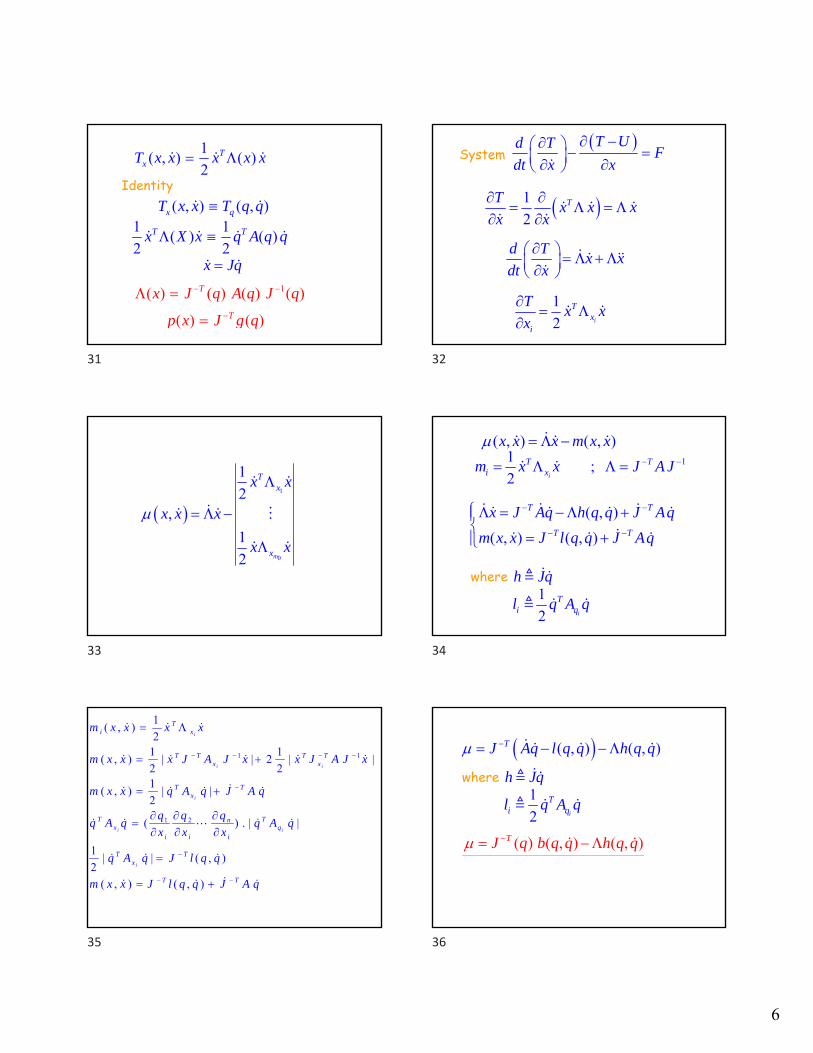
1( , ) ( )
2T
xT x x x x x
Identity( , ) ( , )x qT x x T q q
1 1( ) ( )
2 2T Tx X x q A q q
x Jq 1( ) ( ) ( ) ( )Tx J q A q J q
( ) ( )Tp x J g q
1
2TT
x x xx x
d Tx x
dt x
1
2 i
Tx
i
Tx x
x
System T Ud T
Fdt x x
1
0
1
2,
1
2 m
Tx
x
x x
x x x
x x
( , ) ( , )x x x m x x 11
;2 i
T Ti xm x x J A J
( , )
( , ) ( , )
T T
T T
x J Aq h q q J Aq
m x x J l q q J Aq
where h Jq1
2
i
Ti ql q A q
1 1
1 2
1( , )
21 1
( , ) | | 2 | |2 21
( , ) | |2
( ) . | |
1| | ( , )
2
( , ) ( , )
i
i i
i
i i
i
Ti x
T T T Tx x
T Tx
T Tnx q
i i i
T Tx
T T
m x x x x
m x x x J A J x x J A J x
m x x q A q J A q
q q qq A q q A q
x x x
q A q J l q q
m x x J l q q J A q
( , ) ( , )TJ Aq l q q h q q
( ) ( , ) ( , )TJ q b q q h q q
where h Jq1
2
i
Ti ql q A q
31 32
33 34
35 36

7
Joint Space/Operational SpaceRelationships
( , ) ( , ) x qT x x T q q
1 1( ) ( )
2 2T Tx X x q A q q
1 1
2 2T TTq qJ J Aq q
Using ( )x J q q
where ( , ) ( )h q q J q q
1( ) ( ) ( ) ( )Tx J q A q J q
( , ) ( ) ( , ) ( ) ( , )Tx x J q b q q q h q q
( ) ( ) ( )Tp x J q g q
Joint Space/Operational SpaceRelationships
, , and are all expressed in terms ofjoint coordinates P
x qD G D
The domain can be extended toxD
:qD domain excluding singularitiesqD
Example
2
2
1
1
d cx
d s
20
2
1 1
1 1
d s cJ
d c s
2 2q d
g
l1y
CI1
CI2
m1
m2
d2
x
20
2
1 1
1 1
d s cJ
d c s
21 1 0 1;
1 0
dJ
11 21
2 22
0 1 0 0 1
1 0 0 1 0
m d
d m
0
2
0 11 1
01 1
c sJ
ds c
1 J
21
2 2
0
0
m
m m
2221 222 1 1
2 22
I I m l
md
2 2m m
1x1y
1m
2m
2m
37 38
39 40
41 42

8
20
2
01 1 1 1
1 1 1 10
mc s c s
s c s cm
2 2 2m m m
20 2 2 2
22 2 2
1 1
1 1
m m s m s c
m s c m m c
2m2 2m m
20 2 2 2
22 2 2
1 1
1 1
m m s m s c
m s c m m c
Nonlinear Dynamic Decoupling
with TJ F
( ) ( , ) ( )x x x x p x F Model
*( ) ( ,ˆ ˆ) ( )ˆF px x x xF Control Structure
*I x FDecoupled System
Dynamic Decoupling
( ) ( , ) ( )x x x x p x F
*ˆ ˆ ˆ( , ) ( )F F x x p x
0
1 * 1 1ˆ ˆˆ mI X F P P
( )G x ( , )x x ( )P x
0
*( ) ( , ) ( )mI x G x F x x d t
1 ˆ( )G x I
1( , )x x P
( ) :d t unmodeled disturbances
Perfect Estimates
0
*mI x F
input of decoupled end-effector*F
Goal Position Control
*v p gF k x k x x
Closed Loop
0m v p p gI x k x k x k x
43 44
45 46
47 48

9
Closed Loop0m v p p gI x k x k x k x
t
x
max
2gx
1gx
PD Control
*v p gF k x k x x
Velocity-Like Control
* pv g
v
kF k x x x
k
dx
pd g
v
kx x x
k
dx
* pv g
v
kF k x x x
k
* v dF k x x
withmax
d
Vsat
x
1
0 1 max
dx
1
( ) 1
x if xsat x
sign x if x
Trajectory TrackingTrajectory: , , d d dx x x
0
* ( ) ( ) m d v d p dF I x k x x k x x
( ) ( ) ( ) d v d p dx x k x x k x x
with
or
X dx x
0 X v X p Xk k
In joint space
0 q v q p qk k
with q dq q
49 50
51 52
53 54

10
Compliant MotionControl Compliant Manipulation Primitives
Advanced Manipulation Capabilities
Multi-contact Manipulation
55 56
57 58
59 60

11
Unified Motion/Force Control
motion contactF F F contactF
motionF
Unified Motion/Force Control
0 0 0( ) , ( ) contactox x p x F F
•Generalized Selection Matrix
•Dynamic Model (Homogeneity)
Task Description Task Specification
motion forceF F F
1 0 0
0 1 0 ;
0 0 0
I
Selection matrix
Generalized Selection Matrix
fR
fRSelection in0( ) ( )fR f Rf R f
fRf
0RSelection in
f
Tf RR f
0RTf fR R f
0 0
0 0 ;
0 0
x
y
z
F
F F
F
3F FI
Generalized Selection Matrix
0 0
0 0 ;
0 0
x
y
z
M
M M
M
3M MI
61 62
63 64
65 66

12
0
0
TF F F
TM M M
R R
R R
0
0
TF F F
TM M M
R R
R R
Generalized Selection Matrix Basic Dynamic Model
( )x J q q
Operational force
?
Forces &Moments
( )TJ q F
Linear & AngularVelocities
0 ( )v
J q q
0( )x J E Jq qx
0 ˆf
Fm
TfE F
m
0 )(T TTJ JF FE
vx E
Forces & Moments
ˆv
Basic Dynamic Model
0TE E
( , ) ( )x x x p x F
0 0 0 0( , ) ( )x p x F
TE
ˆv
with
r rx E
Orientation Representation
rx
rdxr r rdx x x
r rx E
Instantaneous Angular Error
r rx E
r rx E
r rE x
Instantaneous Angular Error
67 68
69 70
71 72

13
p pdd
r rd
x xx x
x x
r rx E
r rx E
( )r r r d rx x x E
( )r r r dE x x
Control – Position Errors
p pdx x
ErrorVector
Goal Position pdd
rd
xx
x
*p p pd v pf k x x k x
*p vm k k
with r r r rdE x x x
Closed loop
. 0p v p p p pdI x k x k x x 0v pI k k
Direction Cosines
1
2T
r rE E
1 2 3
TT T Trx r r r
1 2 3
TT T Trd d d dx r r r
The angular rotation error
1 1 2 2 3 3
1ˆ ˆ ˆ
2 d d dr r r r r r
Euler ParametersThe end-effector orientation
0 1 2 3
T
rx
The desired orientation 0 1 2 3
T
d d d d d
The angular rotation error
1 0 3 2
2 3 0 1
3 2 1 0
2RE
( )R dE
Motion Tracking , ,pd pd pdx x x
*pd p p pd v p pdF x k x x k x x
Closed loop
. 0x v x p xI k k
px p pdx x with
Angular Acceleration
r rEx
r r rEx E
rr r rxE E E
73 74
75 76
77 78

14
Acceleration Direction Cosines
The orientation is described by
1 2 3
TT T Trx r r r
1 ( 1) 2 ( 1) 3 ( 1); ; ;n n nr x r y r z
0R1nR
10n
The second time derivatives
2
( 1)( 1) ( 1)2
nn n
d
dt
x
x x
2
( 1)( 1) ( 1)2
nn n
d
dt
y
y y
2
( 1)( 1) ( 1)2
nn n
d
dt
z
z z
However T T u v w u v w v w u
( ) , ) ( )( Tr r r rE R x x x x
This yields
where
1 3
2 3
3 3
, )(
T
Tr
T
r I
r I
r I
R
x
1 1, )
2 2(T T
d rd r rdE x R xx
Acceleration Direction Cosines
Euler ParametersThe acceleration associated with
Euler parameters
1 1( )
4 2T
since 0T
1 2 3
0 3 2
3 0 1
2 1 0
The angular acceleration vector
2T
The desired angular acceleration
2T
d d d
Euler Parameters
79 80
81 82
83 84

15
Motion Tracking , ,pd pd pdx x x
*pd p p pd v p pdF x k x x k x x
Closed loop
. 0x v x p xI k k
px p pdx x with
*d p v dm k k
with r r rdE x x
d r rd rdE x x
d r rd rd r rd rd dE x x E x E x and
Motion Tracking , ,pd pd pdx x x
*pd p p pd v p pdf x k x x k x x
Closed loop
0p pd v p pd p p pdx x k x x k x x
0d v d pk k
A Mass Spring SystemSystem
smz k z f
s sf k z
1s s
s
m f f fk
Control
fs f s d v sf f m k f f k f
s compf f m f
Control-loop System
0fs s v s s f s df k k f k k f f
Static Equilibrium
s df f
1s s
s
m f f fk
System End-Effector/Sensor System
0 0 0 0( , ) ( ) contactFx p x F
0 motion forceF F F
Unified Control
*0 0 0
ˆ ˆˆmotionmotion F PF
*0
ˆforceforc sensore F FF
85 86
87 88
89 90

16
End-Effector/Sensor System
0 0 0 0( , ) ( ) contactFx p x F
0 motion forceF F F
Unified Control
*0 0 0
ˆ ˆˆmotionmotion F PF
*0
ˆforf ce desorce iredF FF
Unified Motion & Force Control
Two decoupled Subsystems
*motionF *forceF
Unified Motion & Force Control
Two decoupled Subsystems
*motionF *forceF
Humanoid RoboticsHualong Ren humanoid dexterous hand systems
Rohan Maheshwari navigation/path planning in dynamic environments; bipedal walking
Mishel Johns Task planning; Predictive control algorithms
Chris Dembia human motion synthesis
Medical RoboticsKyuwon Kim exoskeleton or robotic limbs for patients
Shiquan Wang Communication optimization for telemanipulator and the control under time delay
HapticsChris Ploch haptic teleoperation
DesignKevin Tong Human Augmenting Exoskeleton Design for Ease of Use?!?!
Path/Trajectory GenerationMinghan Shen Robot Simultaneous Localization and Mapping (SLAM)
Laura Stelzner path planning in dynamic environments
Paul Chen
Thomas Lipp Minimum time trajectories
Luke Allen Path planning for walking robots
Matt Kiener Task planning for compliant motions (contact situations)
Aerial roboticsMartina Troesch Flying robots without external motion capture or micro flying robots with flapping wings
Hao Jiang Airplane Perching
Margaret Chapman Perception and obstacle avoidance for aerial unmanned vehicles (UAVs)
Controller DesignBrian Soe Adaptive and learning control
Patrick Sherman Nonlinear and adaptive control techniquies
Li Xuesen Adaptive and learning control
Lipeng Alex Liang Adaptive and Feedback control
CS327A Paper Review Schedule (June 6, 2008) AI Lab, 1st floor in Gates
Session 1: Haptics and Robotic Surgery2:00-2:15pm Minimally Invasive Surgery (David Johnson)
2:15-2:30pm Surgical Robotics: Needle Steering (Reuben Brewer)
2:30-2:45pm Haptics (Duong Dang)
2:45-3:00pm BREAK
Session 2: Human Robotics and Motion Planning3:00-3:15pm Humanoid Robotics: Dynamics and Control (Koichi Hikawa)
3:15-3:30pm Exoskeleton Control (Adam Leper)
3:30-3:45pm Motion Control: Sensor Integration (Robert Henriksson)
3:45-4:00pm Motion Planning (Chen Gu)
4:00-4:15pm BREAK
Session 3: Tactile and Pressure Sensing4:15-4:30pm Pressure Sensitive Skin (John Ulmen)
4:30-4:45pm Pressure Sensing (Dan Aukes)
4:45-5:00pm Tactile Sensing (Paul Nangeroni)
CS327A Symposium
27th May
Lunch: 12.30pm-1pm
6 Sessions: 1pm-5pm Humanoids, Robot Motion Planning,
Robot Cooperation, Evolutionary Robotics, Robot Design, Haptics
17 speakers: 10 minute talk + 4 minute questions
91 92
93 94
95 96

17
1 : Humanoids 1.00-1.15 pm : Ryan Anderson
Developing personal robots, HRP-2
1.15-1.30 pm : Fred Landavazo IV
Human-robot social interaction
1.30-1.45 pm : Shisheng Cui
Humanoid walking algorithms
1.45-2.00 pm : Haizi Yu
Passive dynamic bipedal walking
2.00-2.15 pm : Shruti Gupta, Taylor Newton, Xiao Ge
Asimo sign language demo
2 : Robot Motion Planning
2.15-2.30 pm : Qiao Zhao Real time vision for robots
2.30-2.45 pm : Chintan Hossain Robot localization and path planning
3 : Robot Cooperation
2.45-3.00 pm : Richard Harris Controlling autonomous robots
3.00-3.15 pm : Ken Oslund Controlling multi-robot formations in
real-time
4 : Evolutionary Robotics
3.15-3.30 pm : Bohua Wang Evolving robots with genetic
algorithms
3.30-3.45 pm : Gerald Brantner Genetic fitness functions that help
robots to move
5 : Robot Design
3.45-4.00 pm : Xiyang Yeh Underwater robot actuation
4.00-4.15 pm : Dan Lopez + Cameron Schaeffer
Swarm robotics algorithms
Designing and controlling swarm robots
6 : Haptics
4.15-4.30 pm : Yu-Wei Lin Overview of haptics and virtual reality
4.30-4.45 pm : Xiao Ge Haptics applications in surgical
robotics
4.45-5.00 pm : Zhan Fan Quek Designs for desktop and wearable
haptic devices
97 98
99 100
101 102
Top Related