







Languages
Pages
Legal

Low Cost, High Accuracy GPS Low Cost, High Accuracy GPS TimingTiming
Tom ClarkTom Clark NASA Goddard Space Flight Center
Greenbelt, MD_____________________________________________________________
Rick HamblyRick HamblyCNS Systems, Inc.Severna Park, MD
____________________________________________________________
Reza AbtahiReza AbtahiCustom Navigation Systems
San Jose, CA
ION -- Sept.20, 2000
Salt Lake City
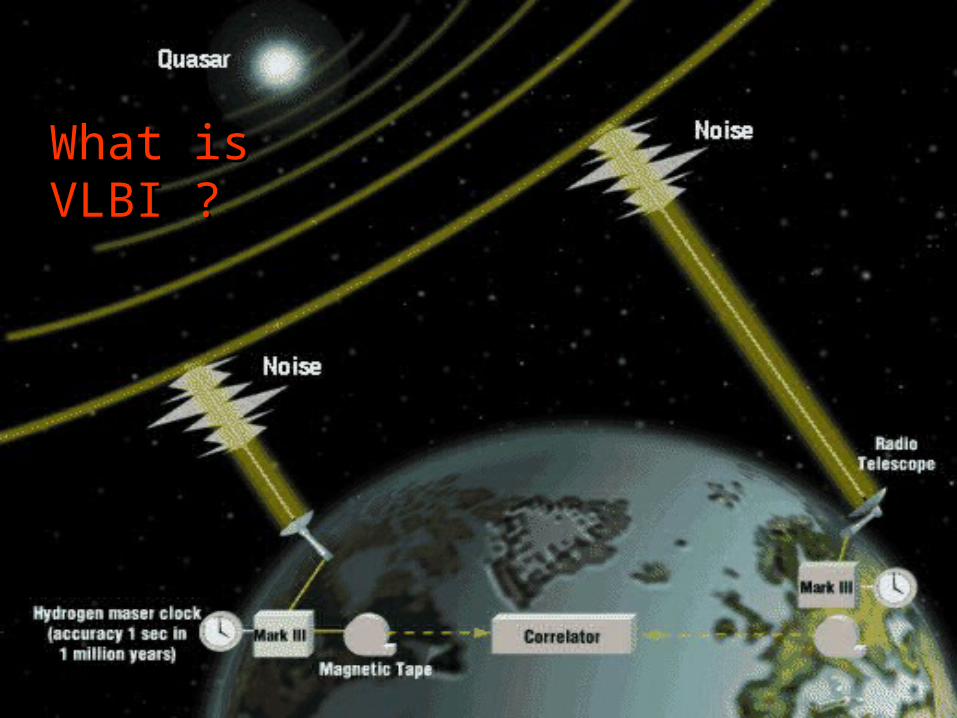
What is VLBI ?What is VLBI ?
Why did this effort get Why did this effort get started?started?
The VLBI community (Radio Astronomy and Geodesy) uses Hydrogen Masers at 40-50 remote sites all around the world. To achieve ~10° signal coherence for ~1000 seconds at 10 GHz we need the two oscillators at the ends of the interferometer to maintain relative stability of [10°/(360°1010Hz103sec)] 2.810-15 @ 1000 sec
To correlate data acquired at 16Mb/s, station timing at relative levels ~50 nsec or better is needed. After a few days of inactivity, this requires [5010-9/ 106 sec] 510-14 @ 106 sec
In Geodetic applications, the station clocks are modeled at relative levels ~30 psec over a day [3010-12/86400 sec] 3.510-16 @ 1 day
Since VLBI defines UT1, we need to control [UTC(USNO) - UTC(VLBI)] to an accuracy ~100 nsec or better. ION -- Sept.20, 2000
Salt Lake City
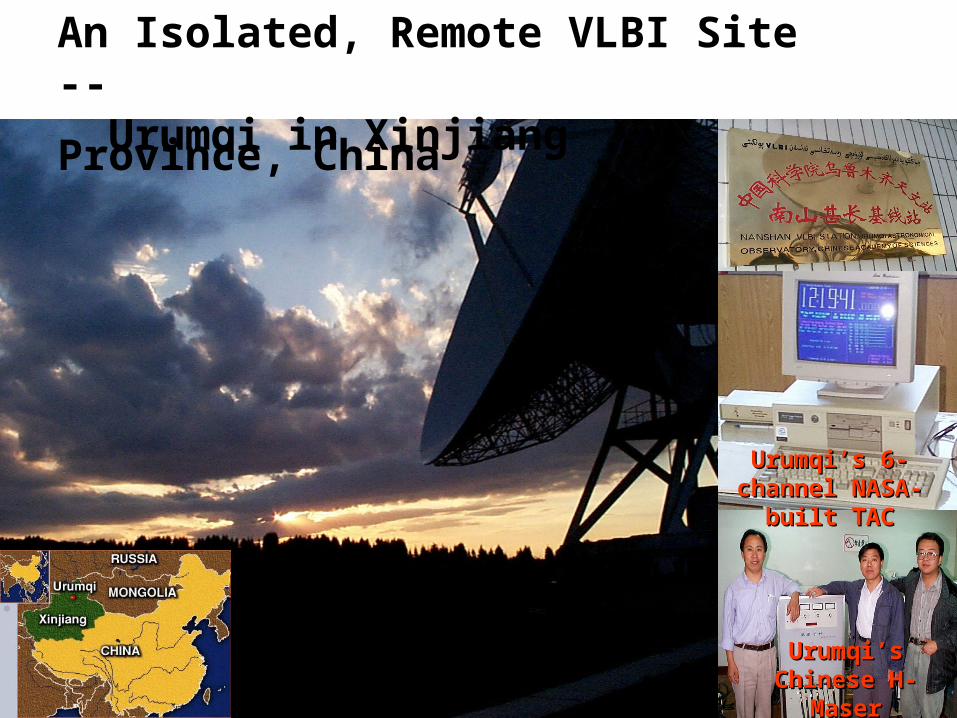
An Isolated, Remote VLBI Site -- Urumqi in Xinjiang Province, China
Urumqi’s 6-Urumqi’s 6-channel NASA-channel NASA-
built TACbuilt TAC
Urumqi’s Urumqi’s Chinese H-Chinese H-
MaserMaser
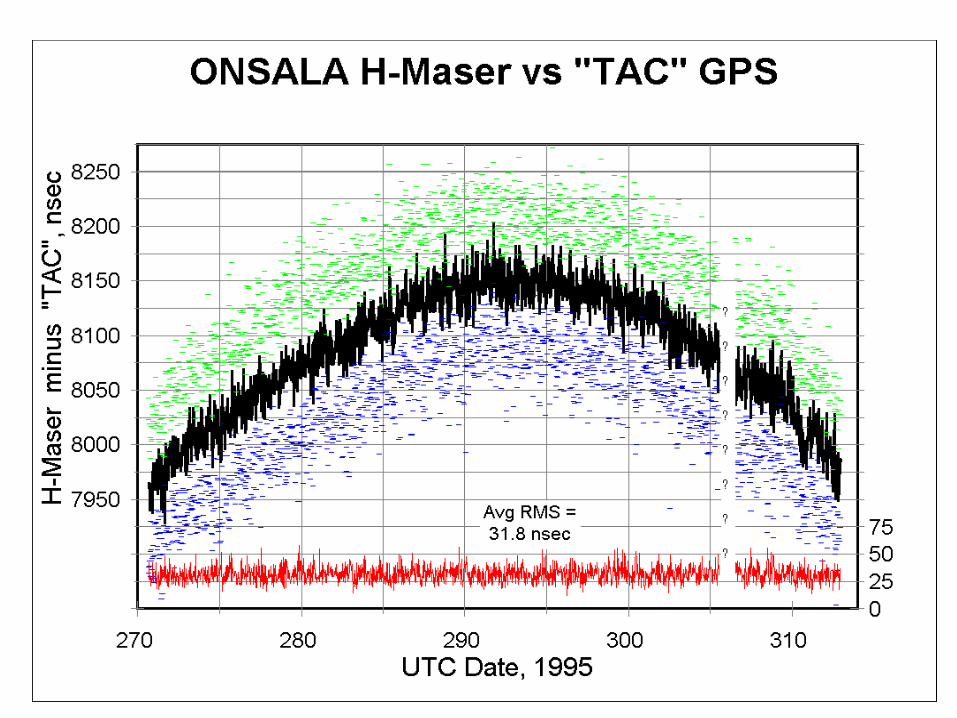

How to get ~30 nsec timing despite How to get ~30 nsec timing despite S/AS/A
Start with a good timing receiver, like the Motorola ONCORE Average the positioning data for ~1-2 days to determine the
station’s coordinates. With S/A on, a 1-2 day average should be good to <5 meters. Or if the site has been accurately surveyed, use the survey values.
Lock the receiver’s position in “Zero-D” mode to this average. Make sure that your Time-Interval Counter (TIC) is triggering
cleanly. Start the counter with the 1 PPS signal from the “house” atomic clock and stop with the GPS receiver’s 1PPS.
Average the individual one/second TIC reading over ~5 minutes.______________
These steps were automated in the SHOWTIME and TAC32Plus Software.
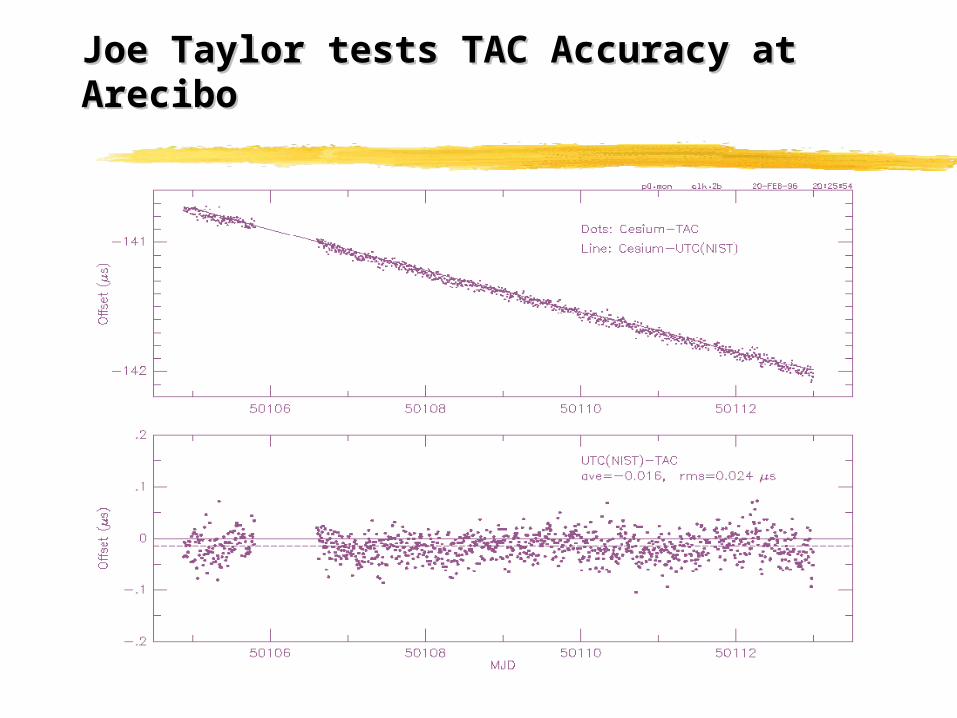
Joe Taylor tests TAC Accuracy at Joe Taylor tests TAC Accuracy at AreciboArecibo

Our Intent for this Paper Changed . Our Intent for this Paper Changed . . .. .
We originally planned to discuss the performance and some applications of single frequency GPS-Based timing receivers based primarily on our experiences with the Motorola VP and UT+ timing receivers. We planned to discuss some of the “tricks” we have used to mitigate against S/A’s effects . . .
-- BUT --
DoD turned off S/A in early May-- AND --
Motorola discontinued the VP receiver
ION -- Sept.20, 2000
Salt Lake City
A discussion of what happened when S/A was turned off.
Some recent results obtained with prototypes of a new, low cost timing receiver:
OEM Chipset: SiRFStar 1Receiver Hardware: Axiom Navigation’s Sandpiper
with Custom Firmware by Reza Abtahi/CNST
A comparison of the new SiRF-based receiver with the venerable Motorola VP and UT+ receivers.
A discussion of the timing accuracy that can be obtained with single-frequency receivers now that S/A is off.
So Now we will Discuss . . . So Now we will Discuss . . .
ION -- Sept.20, 2000
Salt Lake City
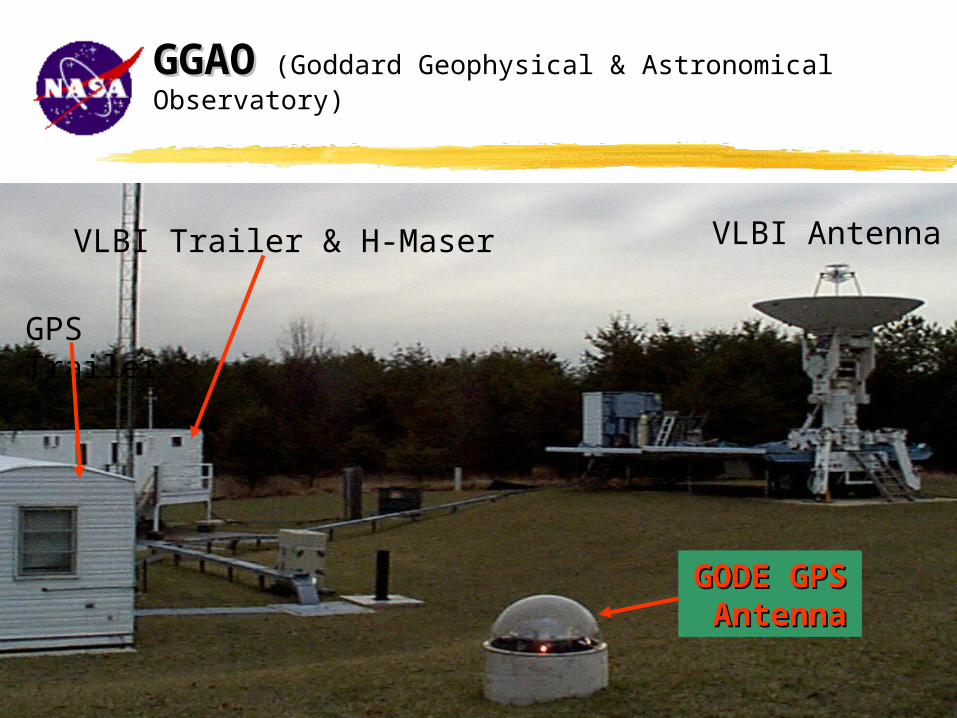
GGAOGGAO (Goddard Geophysical & Astronomical Observatory)
GPS Trailer
VLBI Trailer & H-Maser VLBI Antenna
GODE GODE GPS GPS
AntennaAntenna

G GA O E thern et
T C P/IP D AT A to /fro m th e w orld (* .GGA O.N AS A.GO V)
5 M H z
1P P S
N A S A N RH YDR O G E N M A S E R
M A RK- 4 V LBIS YS T E M
6 M et er V L BIA nt enna
M V - 3 V LBIT RA I LE R
GO D E I GS A N T E N N A
H I G H I S O LA T I O N 8 - W A Y S I G N A L S PL I T T E R
G O D ET R O G
G O D T Z - 12
G O D Z Z - 18
L I N U X PC
W i n9 8 PC
O N CO R E V PO per at ional " T A C "
S PE C T A N A L
O T H E R R & DR C V R S
H P5 3 1 3 2 A Count er
H P5 3 1 3 1 A Count er
A X I O M / S iRFProt otype Rc vr U nd er T e st
W in2 K PC r unningT A C3 2 Plus
W in2 K PC r unningT A C3 2 Plus
1P P S R S 23 2 1P P S R S 232
T ime & F re qu e nc y S ig n a ls to o th e r GGAO u s e rs
GGAO XNT P TIME SERVER
G PS LA B T RA I LE R
T I M I N G T E ST H ARDW A RE
GPS and VLBI T ime & Frequency Systems at N A S A' sGoddard Geophysical and Ast ronomical O bservatory
T .C la rk 07 S e p t.200 0
Start Stop Start Stop
GGA O
5 M Hz
1 PPS
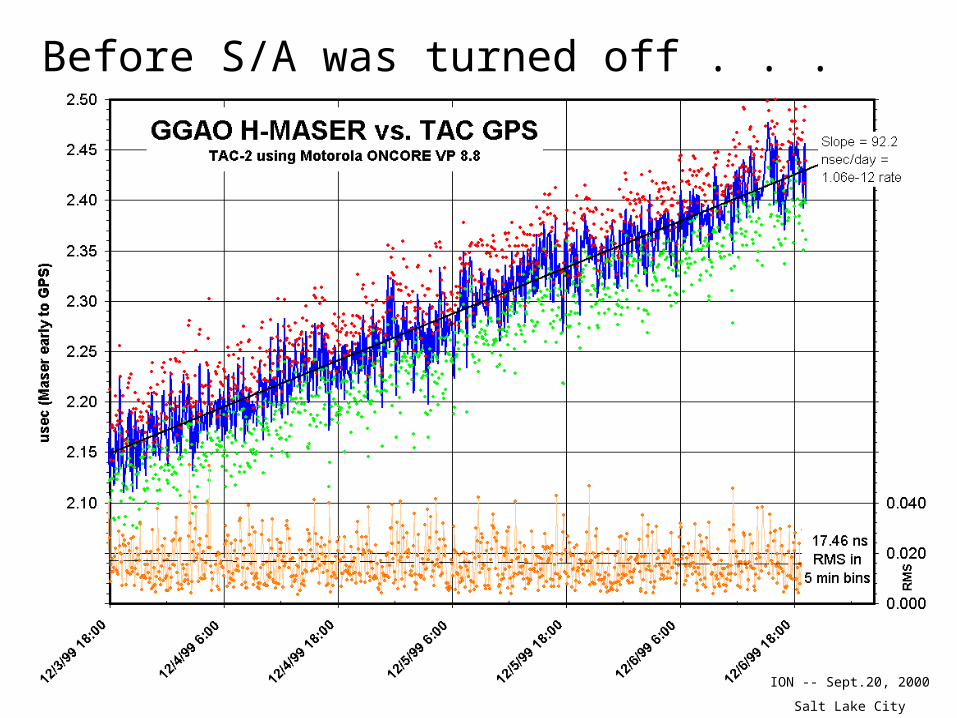
Before S/A was turned off . . .
ION -- Sept.20, 2000
Salt Lake City

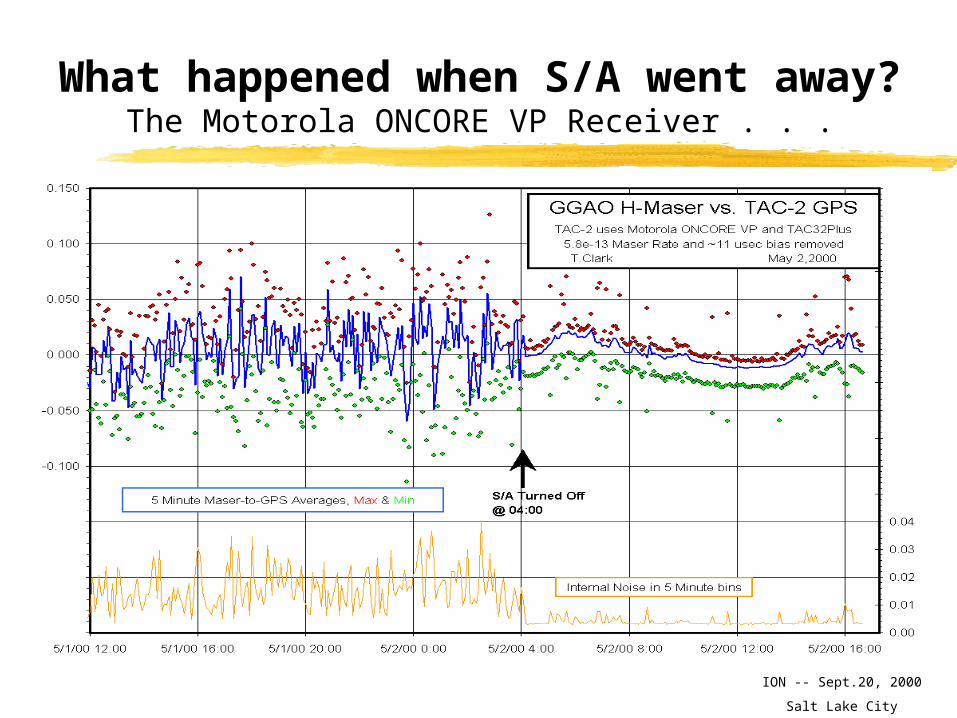
What happened when S/A went away?
The Motorola ONCORE VP Receiver . . .
ION -- Sept.20, 2000
Salt Lake City
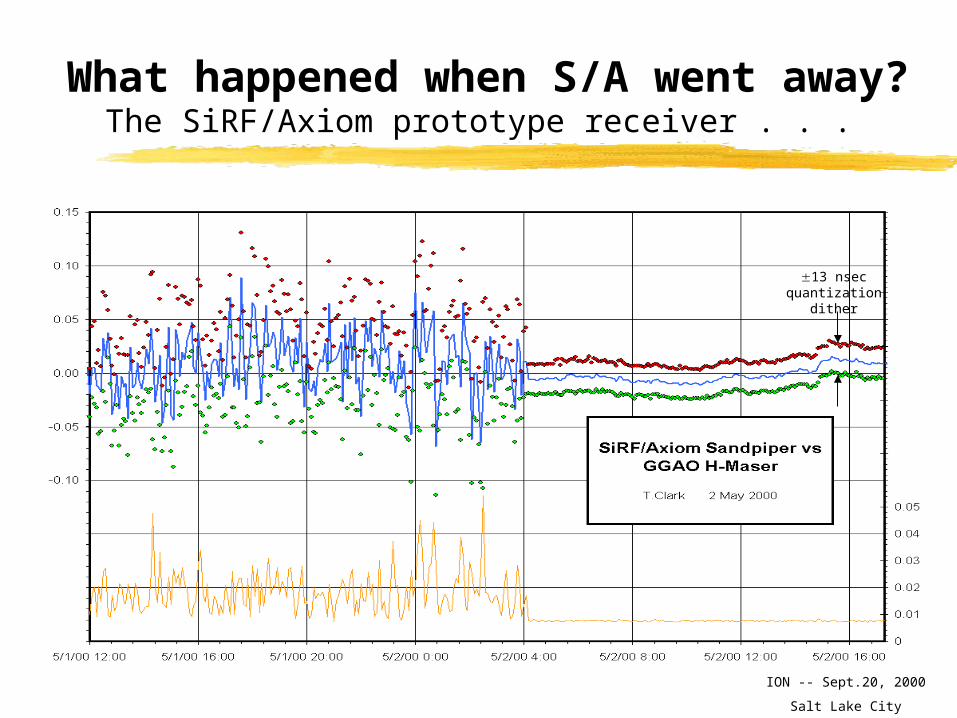
What happened when S/A went away?
The SiRF/Axiom prototype receiver . . .
ION -- Sept.20, 2000
Salt Lake City
13 nsec quantization
dither
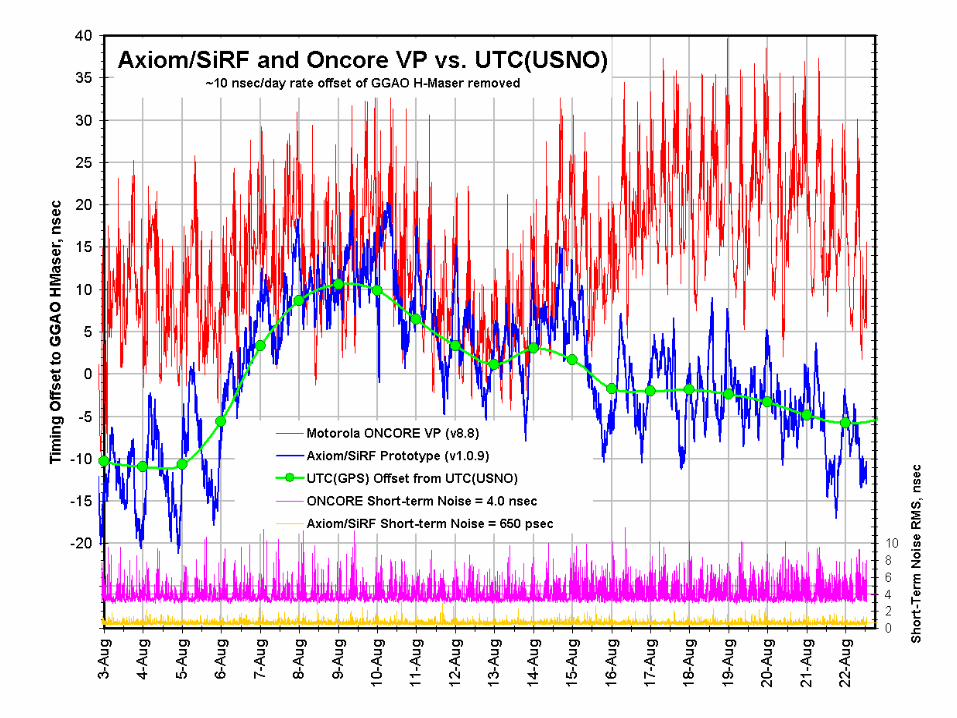
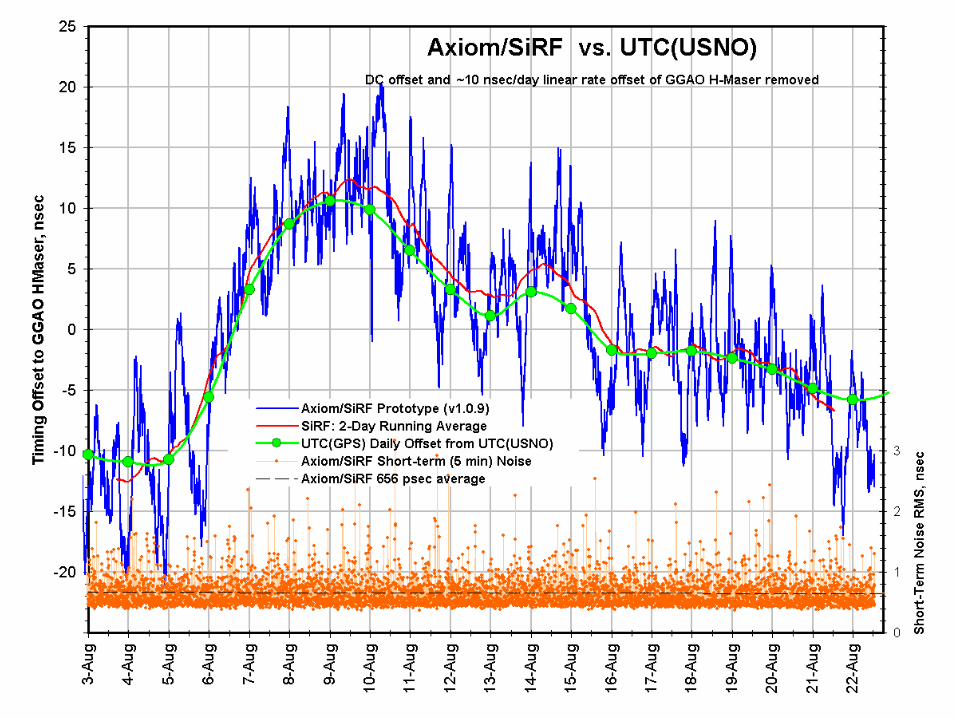
Low-Cost Global Time Synch to <10 Low-Cost Global Time Synch to <10 nsecnsec. . . The Recipe: . . . The Recipe:
Use a good receiver (like the SiRF prototype described here).
Fit an offset rate for local atomic clock, after including the daily GPS Constellation offset value fetched from USNO Web Site.
Smooth the results for at least 2 days to reduce the ionosphere biases.
The Green (Daily Offsets from USNO Web Site) and Red (Remote GPS with 2-day smoothing) curves
differ by under 3 nsec.

Clock Performance --The Bottom Line . . .
Noise, Glitches and Jumps . . . Noise, Glitches and Jumps . . .
The 1PPS signals from the ONCORE and Reza Abtahi’s SiRF receivers are quantized at times defined by their internal clocks. The 1PPS pulse exhibits a sawtooth “dither” error with a period of 5-10 seconds:
ONCORE: 9.54 MHz 52 nsec sawtooth
SiRF: 38.192 MHz 13 nsec sawtooth Both receivers report the magnitude of the sawtooth
error for the next 1PPS pulse in the serial data stream. The TAC32Plus software reads the Time Interval Counter,
applies the sawtooth correction, and then logs the data.
Do the receivers have any errors not included in the sawtooth correction that we now see since S/A has been turned off ? ?
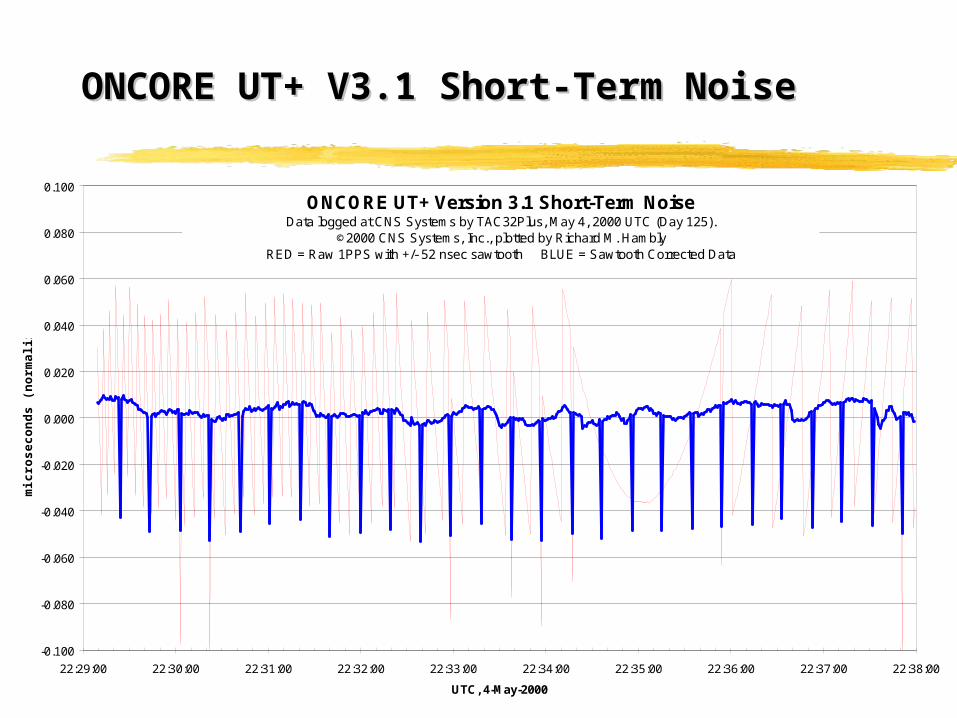
ONCORE UT+ V3.1 Short-Term NoiseONCORE UT+ V3.1 Short-Term Noise
-0.100
-0.080
-0.060
-0.040
-0.020
0.000
0.020
0.040
0.060
0.080
0.100
22:29:00 22:30:00 22:31:00 22:32:00 22:33:00 22:34:00 22:35:00 22:36:00 22:37:00 22:38:00
UTC, 4-May-2000
mic
rose
con
ds
(no
rmal
ized
)
ONCORE UT+ Version 3.1 Short-Term NoiseData logged at CNS Systems by TAC32Plus, May 4, 2000 UTC (Day 125).
©2000 CNS Systems, Inc., plotted by Richard M. HamblyRED = Raw 1PPS with +/- 52 nsec sawtooth BLUE = Sawtooth Corrected Data
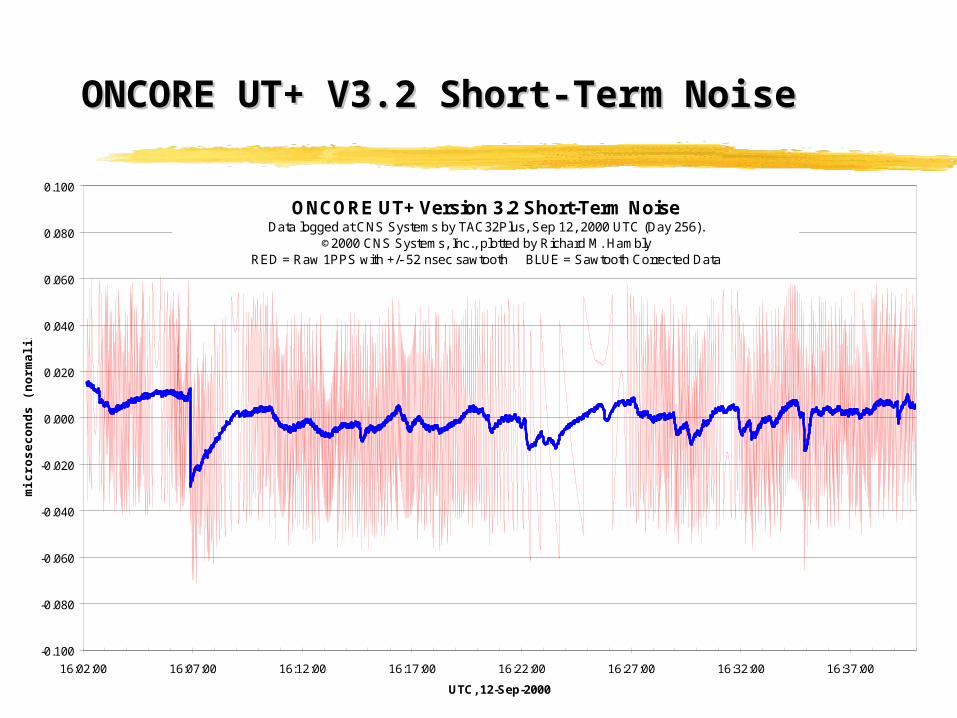
ONCORE UT+ V3.2 Short-Term NoiseONCORE UT+ V3.2 Short-Term Noise
-0.100
-0.080
-0.060
-0.040
-0.020
0.000
0.020
0.040
0.060
0.080
0.100
16:02:00 16:07:00 16:12:00 16:17:00 16:22:00 16:27:00 16:32:00 16:37:00
UTC, 12-Sep-2000
mic
rose
con
ds
(no
rmal
ized
)
ONCORE UT+ Version 3.2 Short-Term NoiseData logged at CNS Systems by TAC32Plus, Sep 12, 2000 UTC (Day 256).
©2000 CNS Systems, Inc., plotted by Richard M. HamblyRED = Raw 1PPS with +/- 52 nsec sawtooth BLUE = Sawtooth Corrected Data
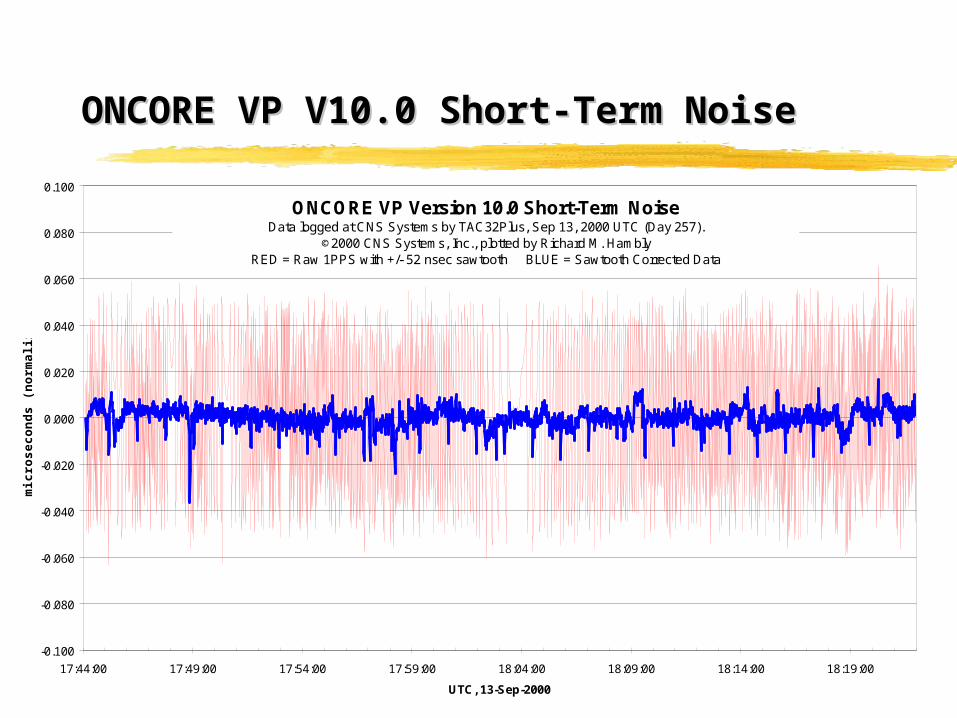
ONCORE VP V10.0 Short-Term NoiseONCORE VP V10.0 Short-Term Noise
-0.100
-0.080
-0.060
-0.040
-0.020
0.000
0.020
0.040
0.060
0.080
0.100
17:44:00 17:49:00 17:54:00 17:59:00 18:04:00 18:09:00 18:14:00 18:19:00
UTC, 13-Sep-2000
mic
rose
con
ds
(no
rmal
ized
)
ONCORE VP Version 10.0 Short-Term NoiseData logged at CNS Systems by TAC32Plus, Sep 13, 2000 UTC (Day 257).
©2000 CNS Systems, Inc., plotted by Richard M. HamblyRED = Raw 1PPS with +/- 52 nsec sawtooth BLUE = Sawtooth Corrected Data
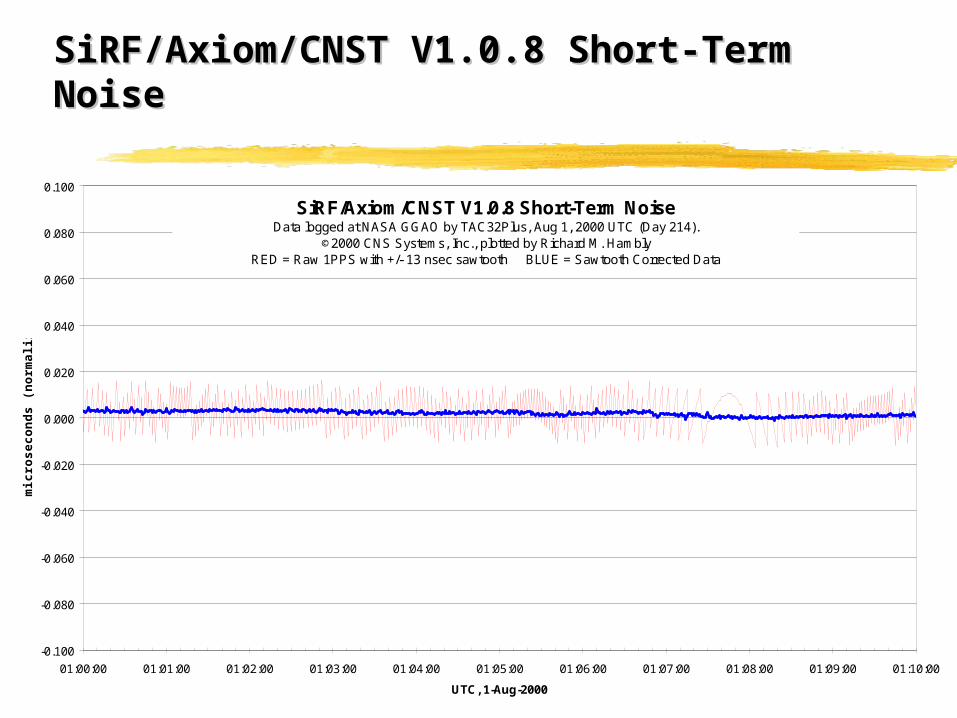
SiRF/Axiom/CNST V1.0.8 Short-Term SiRF/Axiom/CNST V1.0.8 Short-Term NoiseNoise
-0.100
-0.080
-0.060
-0.040
-0.020
0.000
0.020
0.040
0.060
0.080
0.100
01:00:00 01:01:00 01:02:00 01:03:00 01:04:00 01:05:00 01:06:00 01:07:00 01:08:00 01:09:00 01:10:00
UTC, 1-Aug-2000
mic
rose
con
ds
(no
rmal
ized
)
SiRF/Axiom/CNST V1.0.8 Short-Term NoiseData logged at NASA GGAO by TAC32Plus, Aug 1, 2000 UTC (Day 214).
©2000 CNS Systems, Inc., plotted by Richard M. HamblyRED = Raw 1PPS with +/- 13 nsec sawtooth BLUE = Sawtooth Corrected Data
Top Related