







Languages
Pages
Legal


Optimization MethodSolmaz Kia
Mechanical and Aerospace Eng. Dept.,University of California Irvine
Lecture 14Penalty Function Method
Consult: Chapter 12 of Ref[2] and Chapter 17 of Ref[3]
Solution methods for constrained optimization
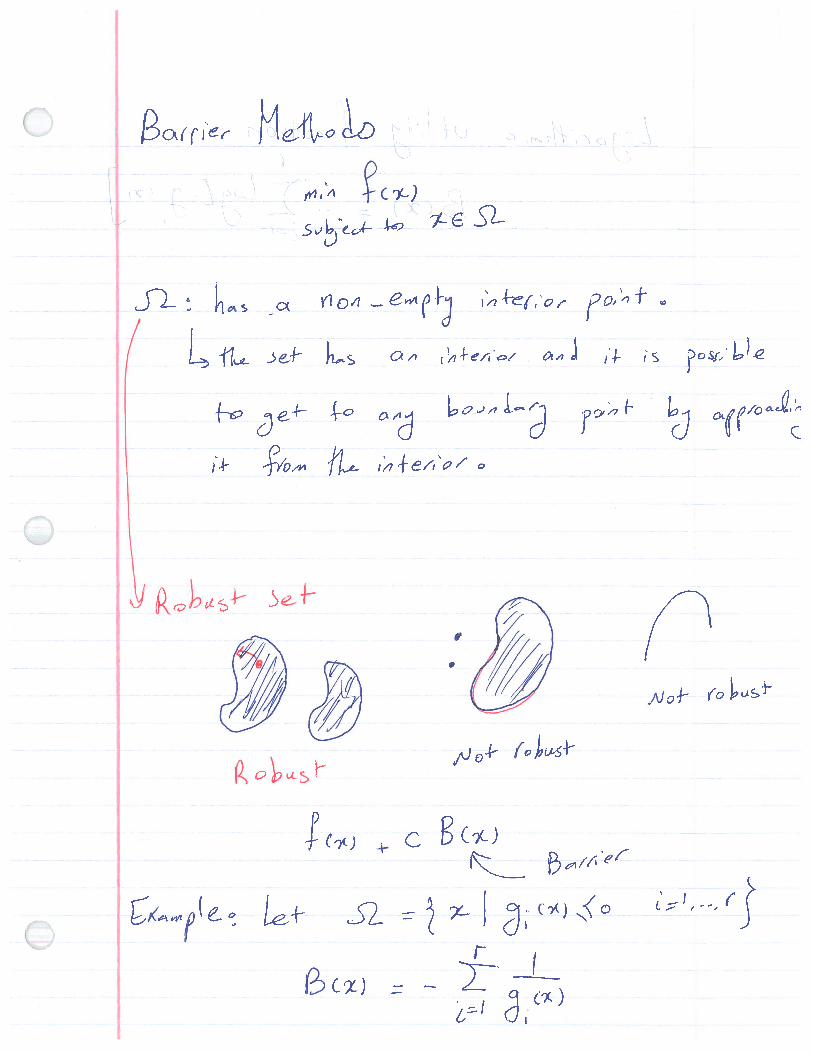
• Idea: Seek the solution by replacing the original constrained problem by a sequence of unconstrained sub-problems– Penalty method– Barrier method– Augmented Lagrangian method

Quadratic Penalty MethodMotivation:• the original objective of the constrained optimization problem, plus• one additional term for each constraint, which is positive when the
current point x violates that constraint and zero otherwise.
Most approaches define a sequence of such penalty functions, in which the penalty terms for the constraint violations are multiplied by a positive coefficient. By making this coefficient larger, we penalize constraint violations more severely, thereby forcing the minimizer of the penalty function closer to the feasible region for the constrained problem. The simplest penalty function of this type is the quadratic penalty function , in which the penalty terms are the squares of the constraint violations.

Penalty Method
The idea of a penalty function method:replace problem (1) by an unconstrained problem of the form
Minimize f(x)+c P(x) (2)where c is a positive constant (penalty weight) and P is a function on Rn satisfying: (i) P is continuous, (ii) P (x ) > 0 for all x∈Rn/Ω, and (iii) P (x ) = 0 if and only if x∈Ω .
Minimize f(x) subject to (1)x∈Ω

Quadratic Penalty Methodminimize f (x) subject tohi(x) = 0, i=1,...,mgj(x) ≤ 0, j=1,...,r
minimize f (x)+ µ2
hi(x)2
i=1
m
∑ + µ2
(max{0,gj (x)})2
j=1
r
∑µP(x )
! "###### $######
cc
c P(x)
c
cc
c
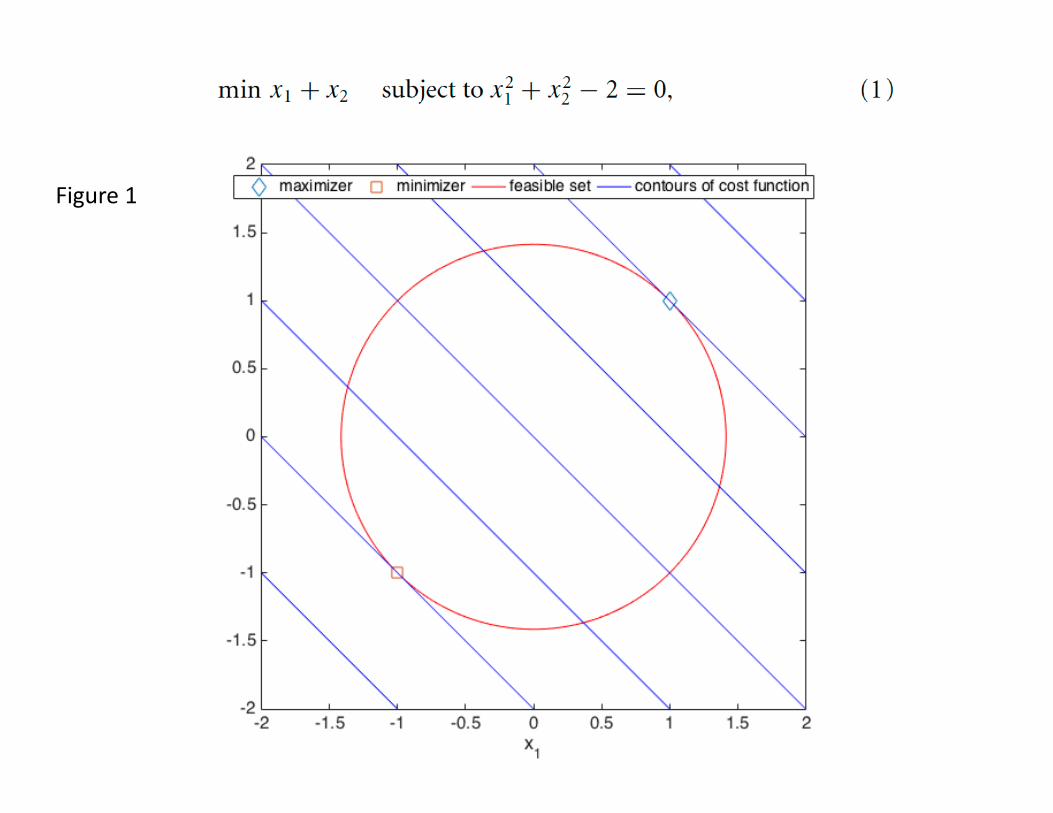
Figure 1

Figure 2
Minimizer of the penalized cost
c
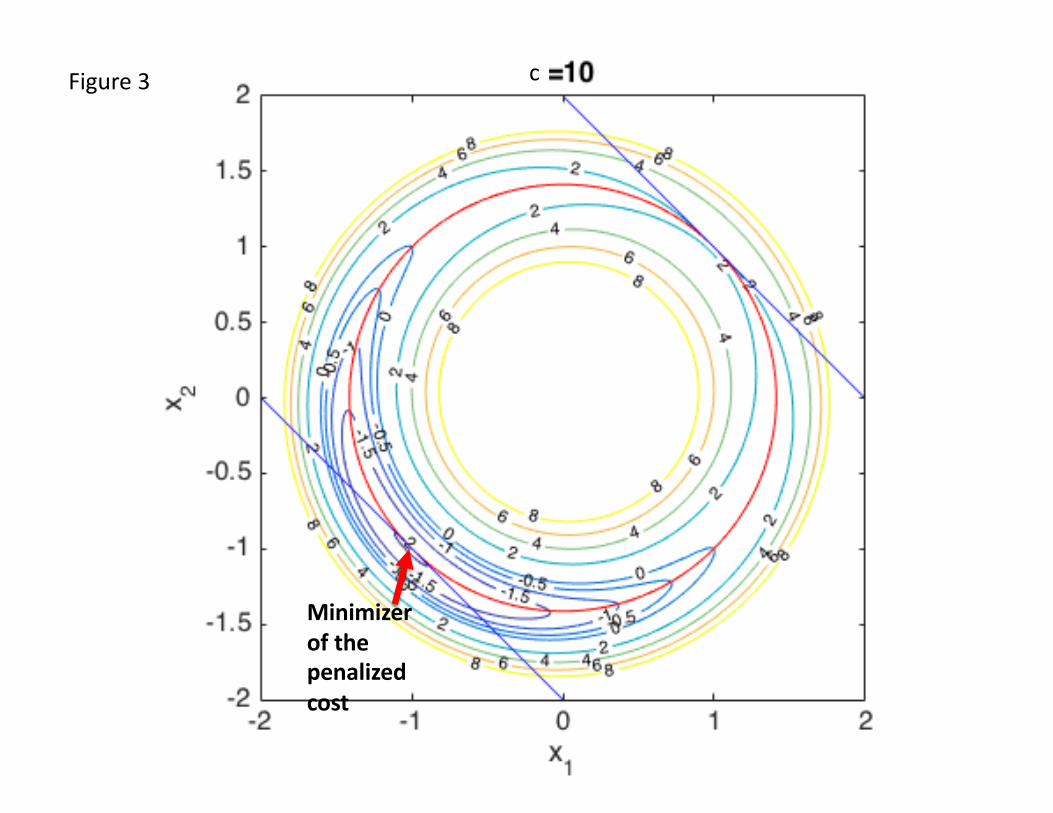
Figure 3
Minimizer of the penalized cost
c

Penalty Method
The procedure for solving problem (1) by the penalty function method: • Let {ck}, k = 1, 2, . . . , be a sequence tending to infinity such
that for each k, ck > 0, and ck+1 > ck.
• Define the function
Q(x; c)=f(x)+c P(x)
• For each k solve the problem Minimize Q(x; ck)
obtaining a solution ck.

Convergence Guarantees of the Quadratic Penalty Method
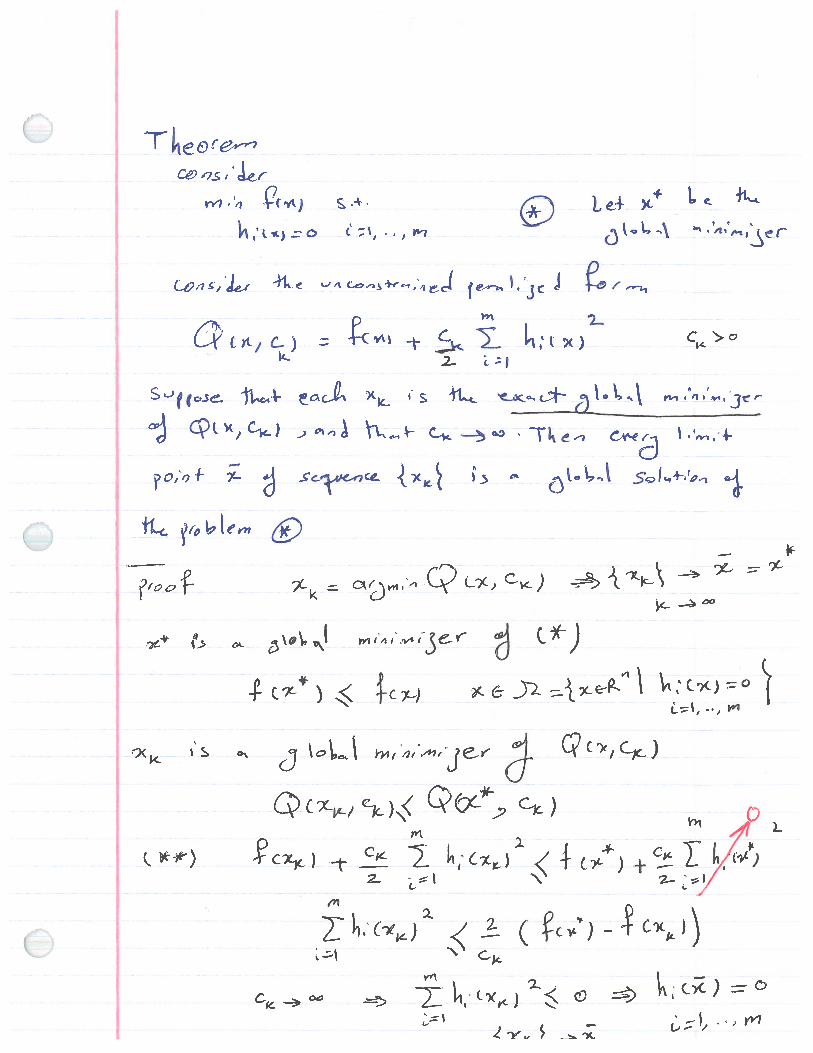
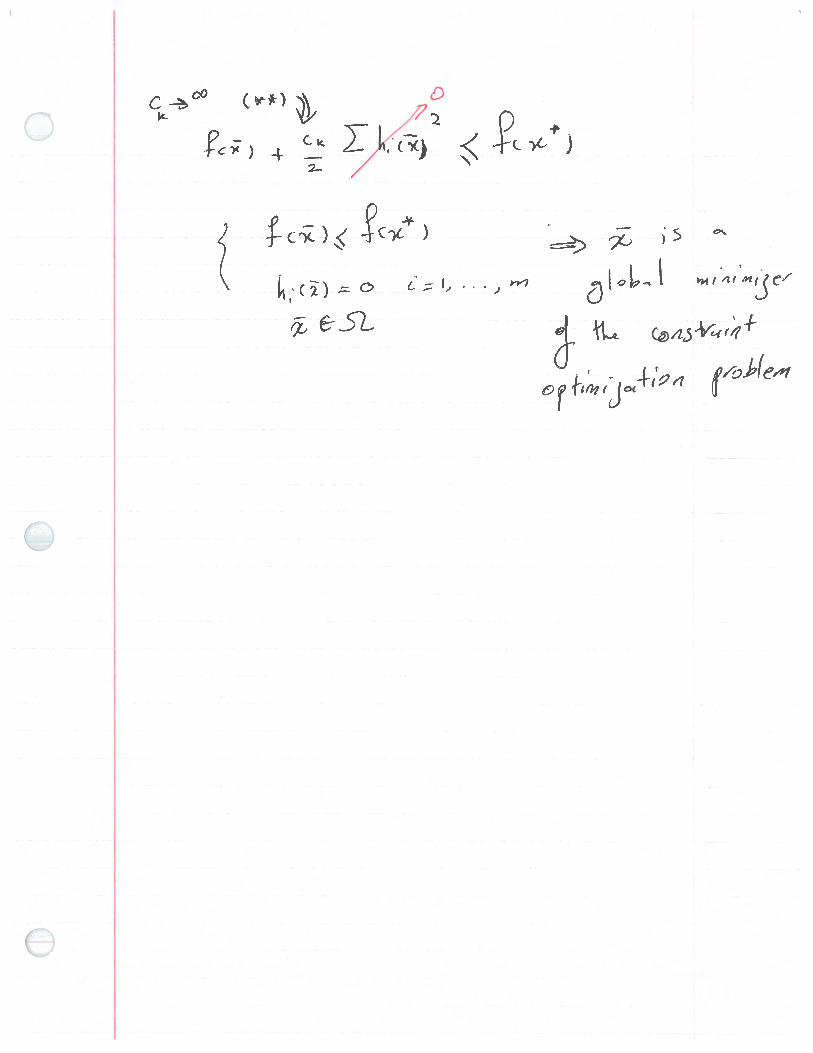
Let x be the global minimizer of minimize f (x) subject to (3)hi(x) = 0, i=1,...,m
Suppose that each xk is the exact global minimizer of Q(x;µk ) = f (x)+ µk
2hi(x)2
i=1
m
∑
for positive and monotonically increasing sequence of {µk}where µk ↑∞. Then every limit point x* of the sequence {xk} is a global solution of the constrained optimization problem (3).
cc
c c
4cJ
-Lj4
A
E
4Tbr40
fr
LV
‘4)
4
0D0
I’0
ii
C(1
‘
S0
Ii
_
-J
_
_)
ci’”÷-44
I
\Zci
04
-0
J‘1’cj
--
o
ccj
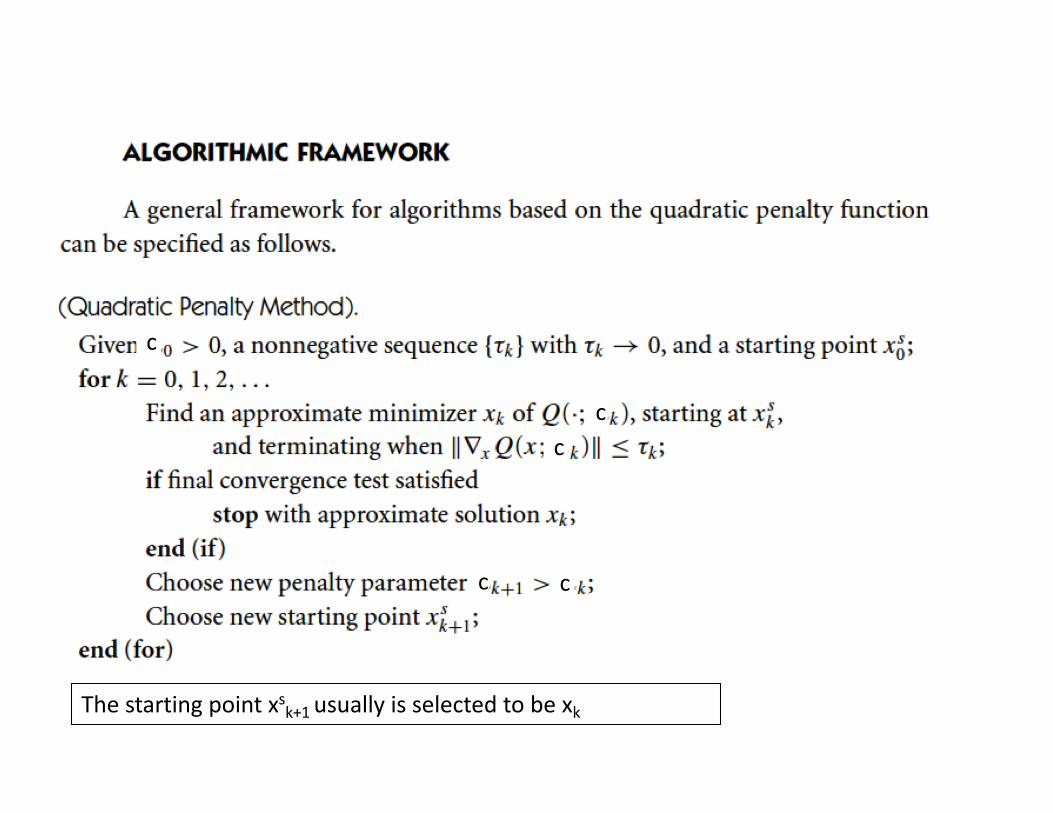
The starting point xsk+1 usually is selected to be xk
c
cc
c c
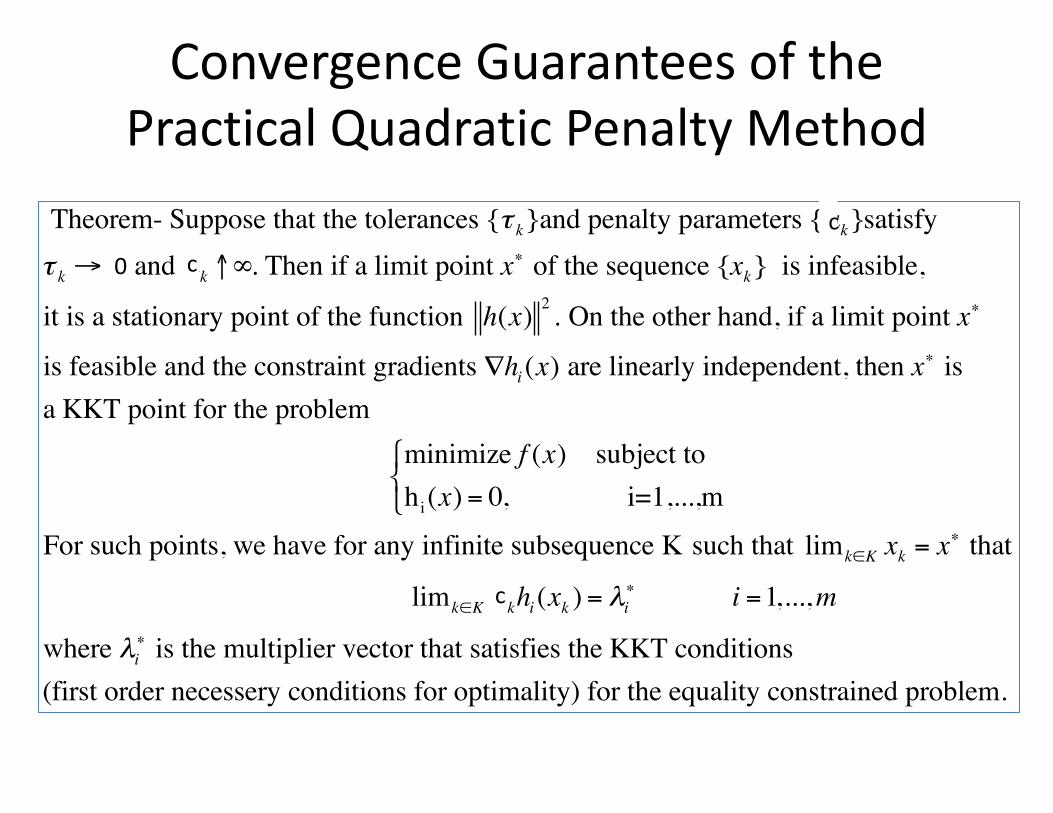
Convergence Guarantees of the Practical Quadratic Penalty Method
Theorem- Suppose that the tolerances {τ k}and penalty parameters {µk}satisfy τ k →∞ and µk ↑∞. Then if a limit point x∗ of the sequence {xk} is infeasible,
it is a stationary point of the function h(x) 2 . On the other hand, if a limit point x∗
is feasible and the constraint gradients ∇hi (x) are linearly independent, then x∗ is a KKT point for the problem
minimize f (x) subject to hi (x) = 0, i=1,...,m&'(
For such points, we have for any infinite subsequence Κ such that limk∈K xk = x∗ that
limk∈K µkhi (xk ) = λi∗ i =1,...,m
where λi∗ is the multiplier vector that satisfies the KKT conditions
(first order necessery conditions for optimality) for the equality constrained problem.
c
cc0

Exact Penalty functionsIt is possible to construct penalty functions that are exact in the sense that • the solution of the penalty problem yields the exact
solution to the original problem for a finite value of the penalty parameter.
• With these functions it is not necessary to solve an infinite sequence of penalty problems to obtain the correct solution.
• Difficulty: these penalty functions are non-differentiable.
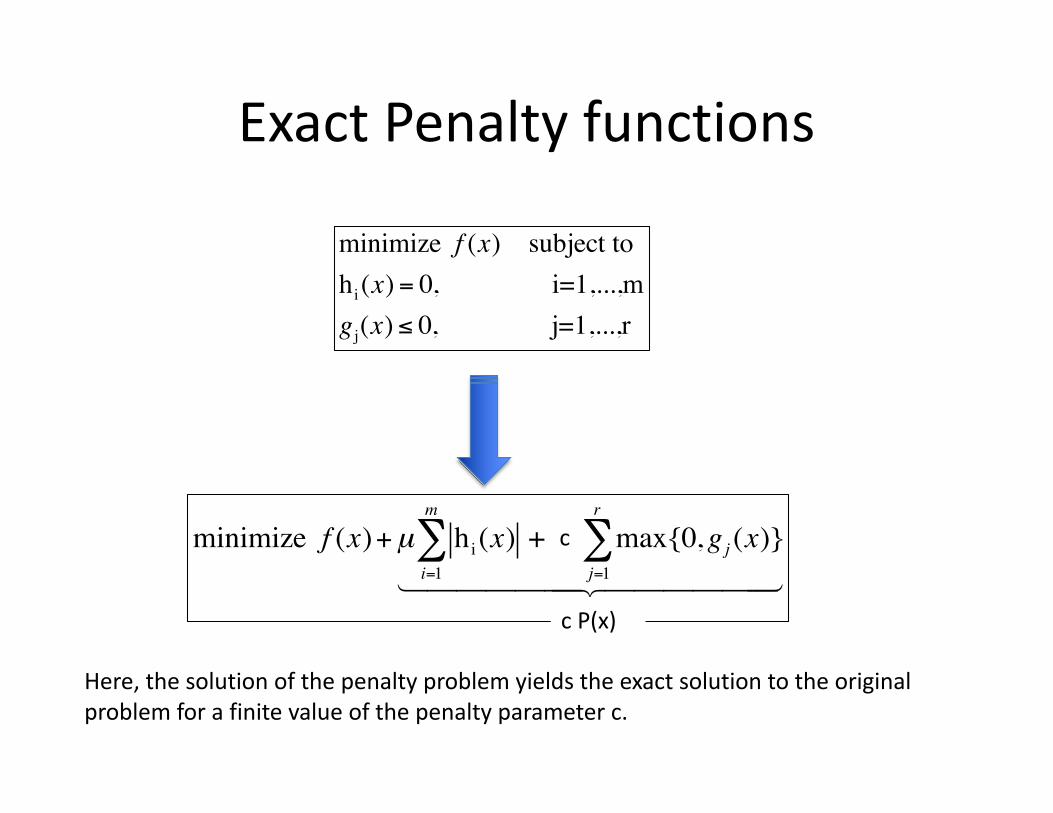
Exact Penalty functions
minimize f (x) subject tohi(x) = 0, i=1,...,mgj(x) ≤ 0, j=1,...,r
minimize f (x)+µ hi(x)i=1
m
∑ + µ max{0,gj (x)}j=1
r
∑µP(x )
! "###### $######
Here, the solution of the penalty problem yields the exact solution to the original problem for a finite value of the penalty parameter c.
c
c P(x)

00
c’
I
N
-4
‘I’ 2.
C’
c I0
j

;tf
—-
i—_--_-___________._____-_—4.-————-—-
.—
-
41
>.
“ii
c(2
2
01
_U
V
0Li
0
S
0
4
\j
4
0
‘F’
-ì
‘0

,1
(j
¶‘
JJ.L7
7
C,
00
-4-
c
1
/ N7.
•,
/
1/1
•
$fl,->
4-.
_)
•-?-
(d ;, /----
•_.,
•---- .f
•
:(jE,
,C)
::—
\,
C
Zr
‘E::
-:
j7\
J
/Th
Top Related