







Languages
Pages
Legal


I/O-Algorithms
Lars Arge
Aarhus University
March 5, 2008

Lars Arge
I/O-algorithms
2
I/O-Model
• Parameters
N = # elements in problem instance
B = # elements that fits in disk block
M = # elements that fits in main memory
T = # output size in searching problem
• We often assume that M>B2
• I/O: Movement of block between memory and disk
D
P
M
Block I/O
Lars Arge
I/O-algorithms
3
Fundamental Bounds Internal External
• Scanning: N
• Sorting: N log N
• Permuting
• Searching: NBlog
BN
BN
BMlog
BN
log,minBN
BN
BMNN
N2log

Lars Arge
I/O-algorithms
4
Fundamental Data Structures
• B-trees: Node degree (B) queries in
– Rebalancing using split/fuse updates in
• Weight-balanced B-tress: Weight rather than degree constraint
Ω(w(v)) updates below v between rebalancing operations on v
• Persistent B-trees:
– Update in current version in
– Search in all previous versions in
• Buffer trees
– Batching of operations to obtain bounds
construction algorithms
)(log BT
B NO )(log NO B
)(log BT
B NO )(log NO B
)log( 1BN
BMBO
)log(BN
BN
BMO
Lars Arge
I/O-algorithms
5
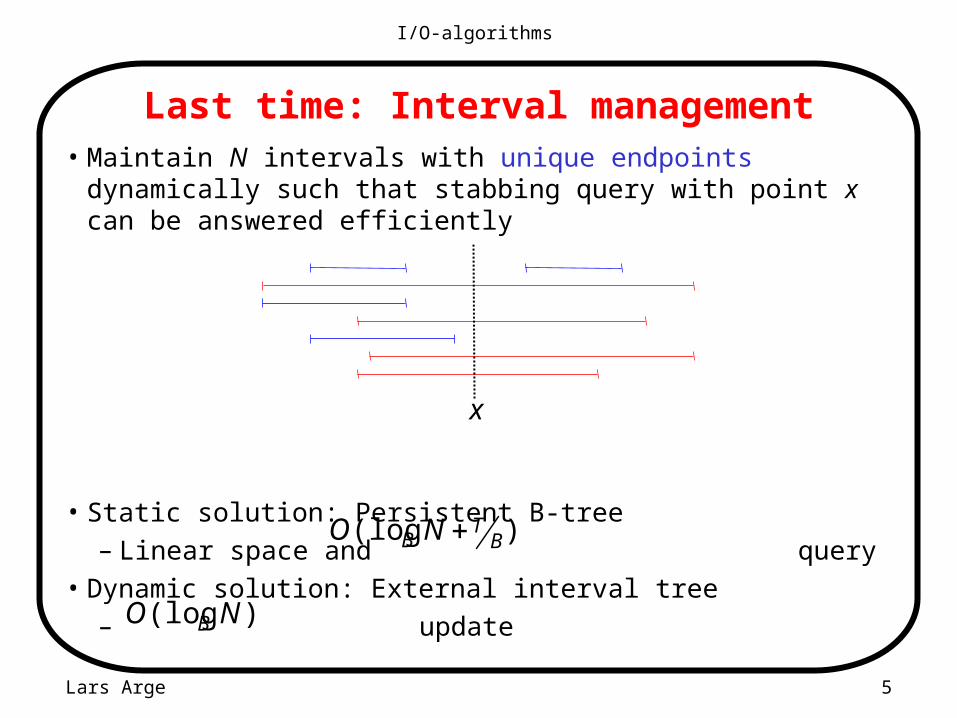
Last time: Interval management• Maintain N intervals with unique endpoints dynamically such that
stabbing query with point x can be answered efficiently
• Static solution: Persistent B-tree
– Linear space and query
• Dynamic solution: External interval tree
– update
x
)(log BT
B NO
)(log NO B
Lars Arge
I/O-algorithms
6
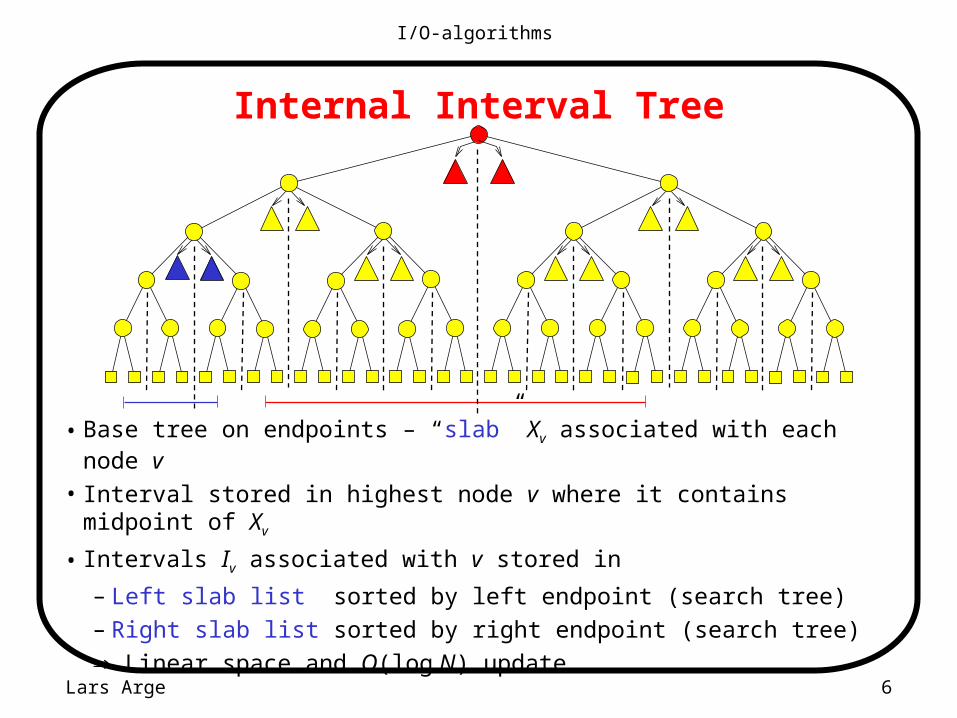
• Base tree on endpoints – “slab” Xv associated with each node v
• Interval stored in highest node v where it contains midpoint of Xv
• Intervals Iv associated with v stored in
– Left slab list sorted by left endpoint (search tree)
– Right slab list sorted by right endpoint (search tree)
Linear space and O(log N) update
Internal Interval Tree
Lars Arge
I/O-algorithms
7
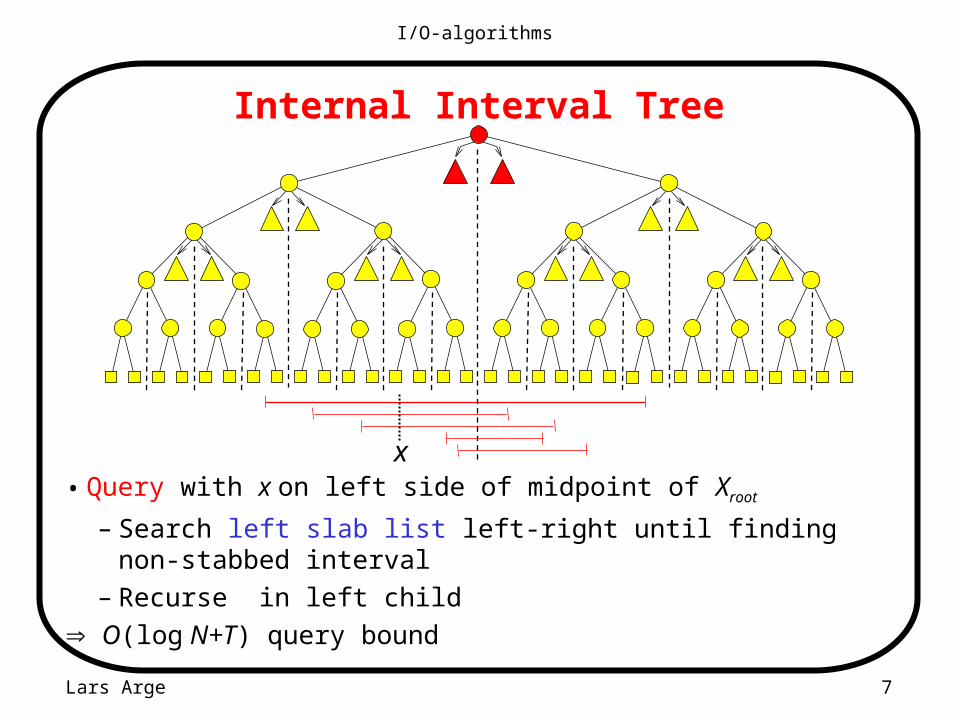
• Query with x on left side of midpoint of Xroot
– Search left slab list left-right until finding non-stabbed interval
– Recurse in left child
O(log N+T) query bound
x
Internal Interval Tree
Lars Arge
I/O-algorithms
8
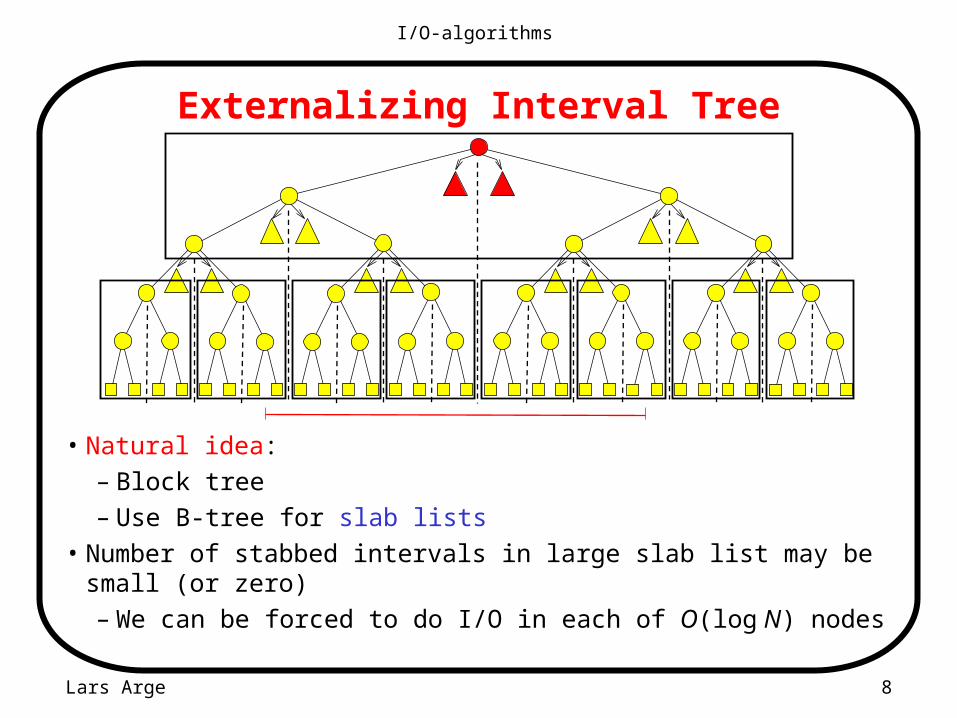
Externalizing Interval Tree
• Natural idea:
– Block tree
– Use B-tree for slab lists
• Number of stabbed intervals in large slab list may be small (or zero)
– We can be forced to do I/O in each of O(log N) nodes

Lars Arge
I/O-algorithms
9
Externalizing Interval Tree
• Idea:
– Decrease fan-out to height remains
– slabs define multislabs
– Interval stored in two slab lists (as before) and one multislab list
– Intervals in small multislab lists collected in underflow structure
– Query answered in v by looking at 2 slab lists and not O(log N)
)( B )(log NO B
)( B )(B
)( B
multislab

Lars Arge
I/O-algorithms
10
External Interval Tree• Linear space, query, update
• General solution techniques:
– Filtering: Charge part of query cost to output
– Bootstrapping:
* Use O(B2) size structure in each internal node
* Constructed using persistence
* Dynamic using global rebuilding
– Weight-balanced B-tree: Split/fuse in amortized O(1)
)(log BT
B NO )(log NO B

Lars Arge
I/O-algorithms
11
Last time: Three-Sided Range Queries• Interval management: “1.5 dimensional” search
• More general 2d problem: Dynamic 3-sidede range searching
– Maintain set of points in plane such
that given query (q1, q2, q3), all points
(x,y) with q1 x q2 and y q3 can
be found efficiently
• Linear space, O(logB N+T/B) query static solution using persistence
– Dynamic: External priority search tree
(x,x)
(x1,x2)
x
x1 x2
q3
q2q1
Lars Arge
I/O-algorithms
12
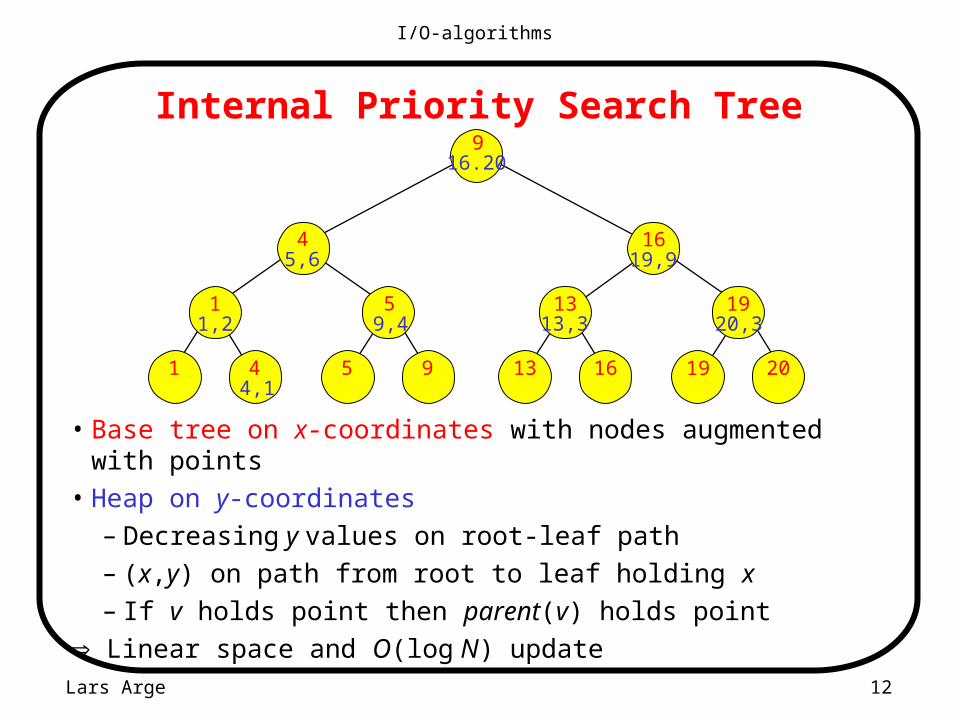
• Base tree on x-coordinates with nodes augmented with points
• Heap on y-coordinates
– Decreasing y values on root-leaf path
– (x,y) on path from root to leaf holding x
– If v holds point then parent(v) holds point
Linear space and O(log N) update
Internal Priority Search Tree9
16.20
1619,9
1313,3
1920,3
45,6
59,4
11,2
201916139544,1
1
Lars Arge
I/O-algorithms
13
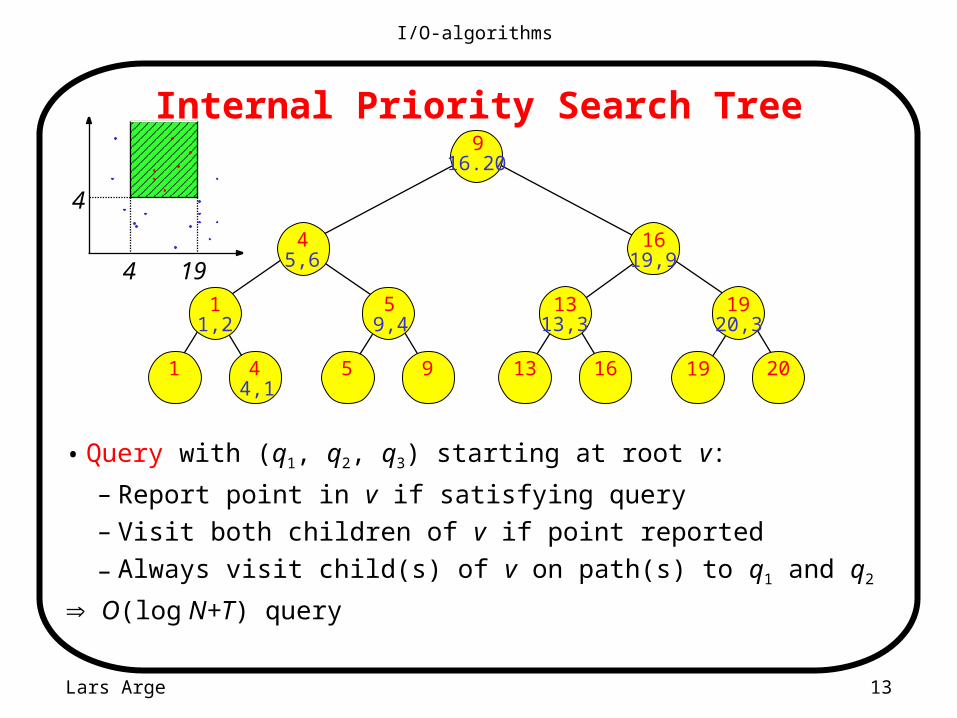
Internal Priority Search Tree
• Query with (q1, q2, q3) starting at root v:
– Report point in v if satisfying query
– Visit both children of v if point reported
– Always visit child(s) of v on path(s) to q1 and q2
O(log N+T) query
916.20
1619,9
1313,3
1920,3
45,6
59,4
11,2
201916139544,1
1
4
194

Lars Arge
I/O-algorithms
14
• Natural idea: Block tree
• Problem:
– I/Os to follow paths to to q1 and q2
– But O(T) I/Os may be used to visit other nodes (“overshooting”)
query
Externalizing Priority Search Tree9
16.20
1619,9
1313,3
1920,3
45,6
59,4
11,2
201916139544,1
1
)(log NO B
)(log TNO B

Lars Arge
I/O-algorithms
15
Externalizing Priority Search Tree
• Solution idea:
– Store B points in each node * O(B2) points stored in each supernode
* B output points can pay for “overshooting”
– Bootstrapping:
* Store O(B2) points in each supernode in static structure
916.20
1619,9
1313,3
1920,3
45,6
59,4
11,2
201916139544,1
1

Lars Arge
I/O-algorithms
16
Summary/Conclusion: Priority Search Tree• We have now discussed structures for special cases of two-
dimensional range searching
– Space: O(N/B)
– Query:
– Updates:
• Cannot be obtained for general (4-sided) 2d range searching:
– query requires space
– space requires query
q3
q2q1q
q
q3
q2q1
q4
)(loglog
logN
NBN
BB
BΩ)(log NO cB
)(BNO )( B
N
)(log NO B
)(log BT
B NO

Lars Arge
I/O-algorithms
17
• Base tree: Weight balanced tree with branching parameter
and leaf parameter B on x-coordinates
height
• Points below each node stored in 4 linear space secondary structures:
– “Right” priority search tree
– “Left” priority search tree
– B-tree on y-coordinates
– Interval (priority search) tree
space
External Range Tree
)()(logloglog
loglog N
NN
BB
B
BONO
)(log NΘ B
)(loglog
logN
NBN
BB
BO
)(log NB

Lars Arge
I/O-algorithms
18
• Secondary interval tree:
– Connect points in each slab in y-order
– Project obtained segments in y-axis
– Intervals stored in interval tree
* Interval augmented with pointer to corresponding points in y-coordinate B-tree in corresponding child node
External Range Tree
)(log NB
Lars Arge
I/O-algorithms
19
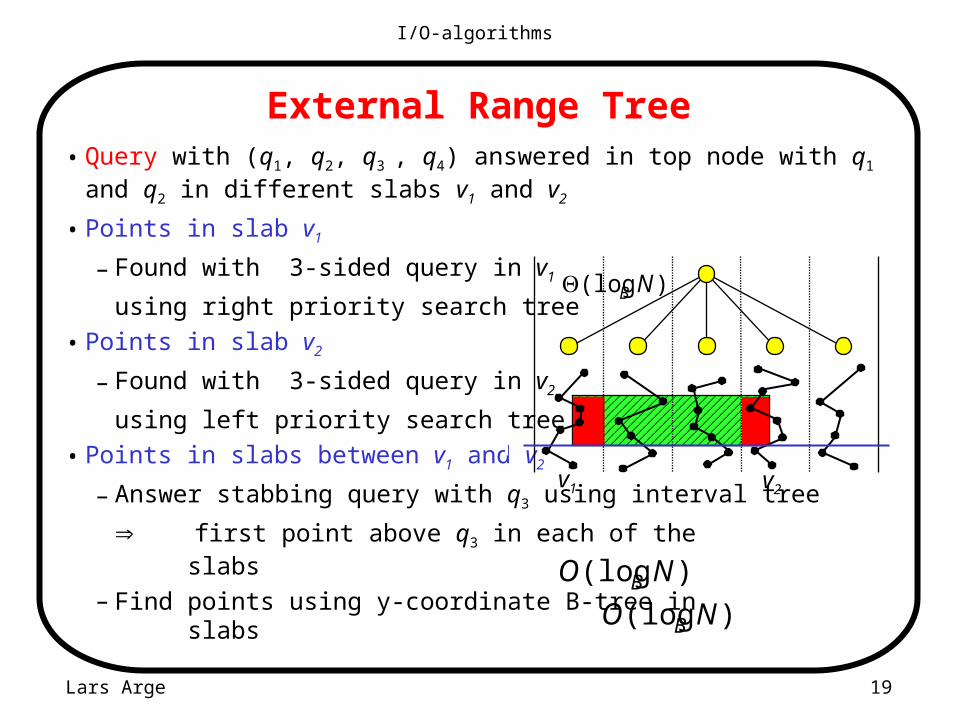
• Query with (q1, q2, q3 , q4) answered in top node with q1 and q2 in different slabs v1 and v2
• Points in slab v1
– Found with 3-sided query in v1
using right priority search tree
• Points in slab v2
– Found with 3-sided query in v2
using left priority search tree
• Points in slabs between v1 and v2
– Answer stabbing query with q3 using interval tree
first point above q3 in each of the slabs
– Find points using y-coordinate B-tree in slabs
External Range Tree
)(log NO B
)(log NO B
)(log NB
v1 v2

Lars Arge
I/O-algorithms
20
External Range Tree• Query analysis:
– I/Os to find relevant node
– I/Os to answer two 3-sided queries
– I/Os to query interval tree
– I/Os to traverse B-trees
I/Os
)(log NO B
)(log BT
B NO )(log)(log log NONO BB
NB
B )(log B
TB NO )(log NO B
)(log BT
B NO )(log NB
v1 v2

Lars Arge
I/O-algorithms
21
External Range Tree• Insert:
– Insert x-coordinate in weight-balanced B-tree
* Split of v can be performed in I/Os
I/Os
– Update secondary structures in all nodes on one root-leaf path
* Update priority search trees
* Update interval tree
* Update B-tree
I/Os
• Delete:
– Similar and using global rebuilding
)(loglog
logN
N
BB
BO)(
logloglog2
NN
BB
BO
))(log)(( vwvwO B
)(loglog
log2
NN
BB
BO
)(log NB
v1 v2
Lars Arge
I/O-algorithms
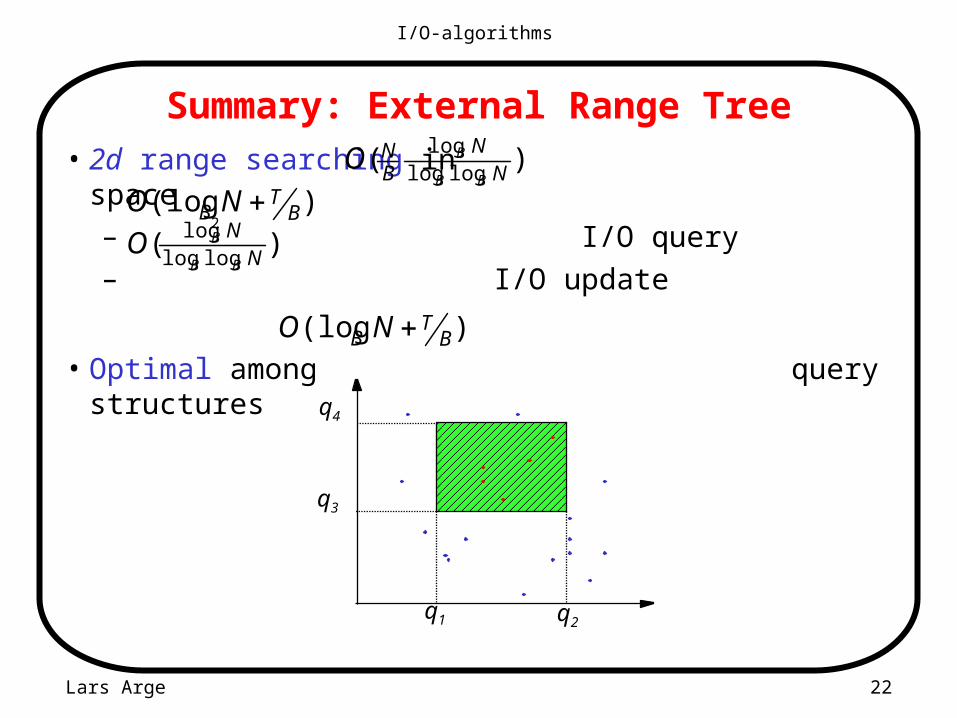
22
Summary: External Range Tree• 2d range searching in space
– I/O query
– I/O update
• Optimal among query structures
)(loglog
log2
NN
BB
BO
)(log BT
B NO )(
logloglog
NN
BN
BB
BO
)(log BT
B NO
q3
q2q1
q4

Lars Arge
I/O-algorithms
23
kdB-tree
• kd-tree:
– Recursive subdivision of point-set into two half using vertical/horizontal line
– Horizontal line on even levels, vertical on uneven levels
– One point in each leaf
Linear space and logarithmic height

Lars Arge
I/O-algorithms
24
kd-Tree: Query
• Query
– Recursively visit nodes corresponding to regions intersecting query
– Report point in trees/nodes completely contained in query
• Query analysis
– Horizontal line intersect Q(N) = 2+2Q(N/4) = regions
– Query covers T regions I/Os worst-case
)( NO
)( TNO
Lars Arge
I/O-algorithms
25
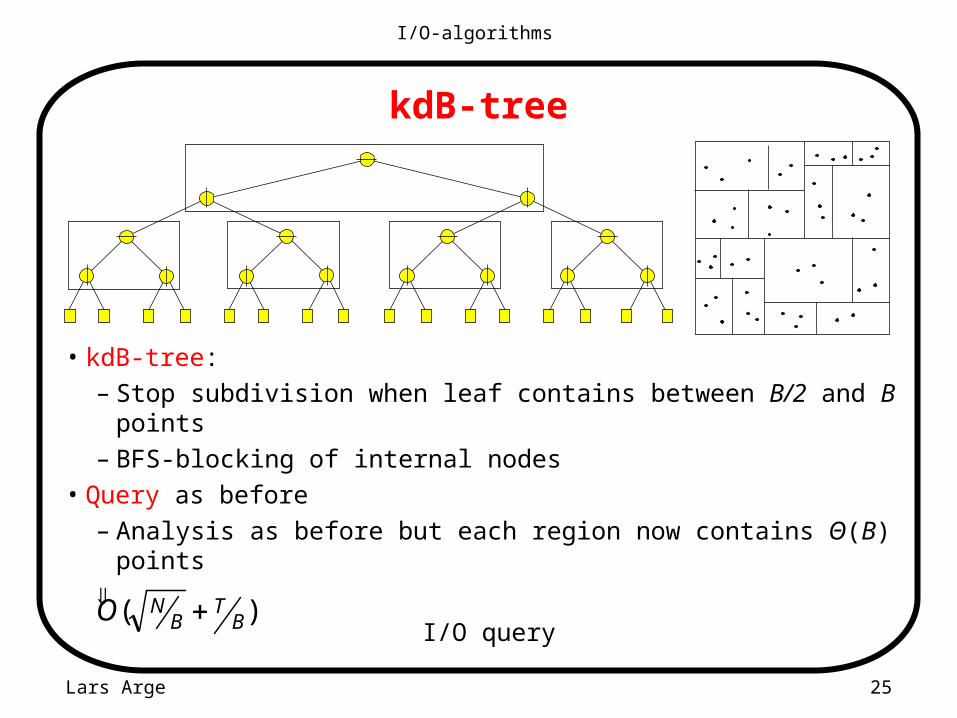
kdB-tree
• kdB-tree:
– Stop subdivision when leaf contains between B/2 and B points
– BFS-blocking of internal nodes
• Query as before
– Analysis as before but each region now contains Θ(B) points
I/O query)( B
TB
NO
Lars Arge
I/O-algorithms
26
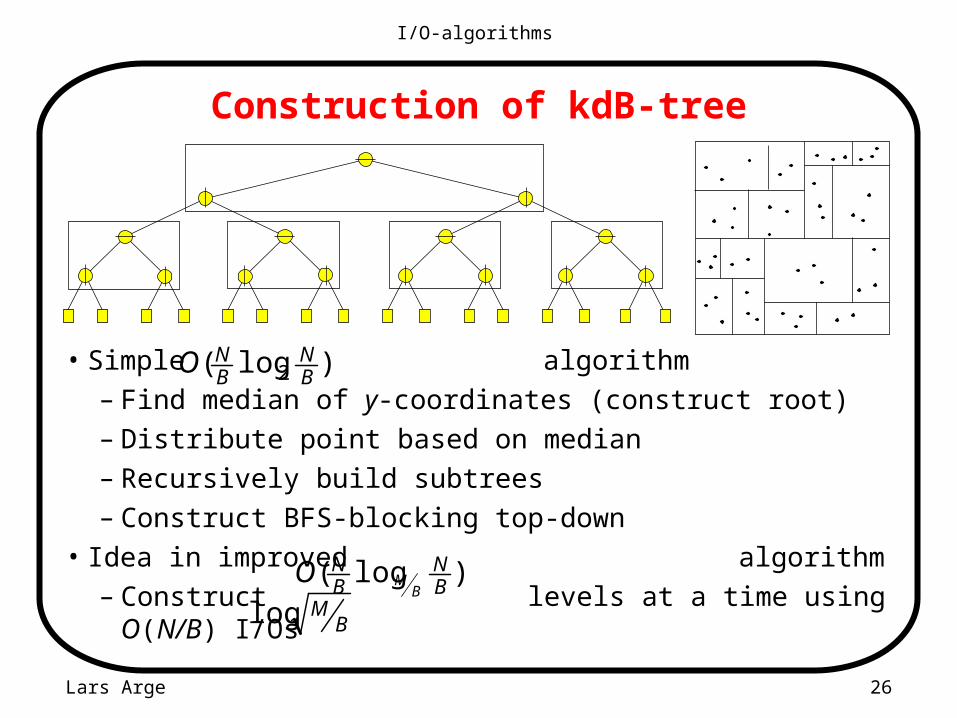
Construction of kdB-tree
• Simple algorithm
– Find median of y-coordinates (construct root)
– Distribute point based on median
– Recursively build subtrees
– Construct BFS-blocking top-down
• Idea in improved algorithm
– Construct levels at a time using O(N/B) I/Os
)log( 2 BN
BNO
)log(BN
BN
BMO
BMlog

Lars Arge
I/O-algorithms
27
Construction of kdB-tree• Sort N points by x- and by y-coordinates using I/Os
• Building levels ( nodes) in O(N/B) I/Os:
1. Construct by grid
with points in each slab
2. Count number of points in each
grid cell and store in memory
3. Find slab s with median x-coordinate
4. Scan slab s to find median x-coordinate and construct node
5. Split slab containing median x-coordinate and update counts
6. Recurse on each side of median x-coordinate using grid (step 3) Grid grows to during algorithm Each node constructed in I/Os
BMlog
)log(BN
BN
BMO
BM
BM
BM
N
BM
)( BM
BM
BM
BM
))/(( BNO BM
Lars Arge
I/O-algorithms
28
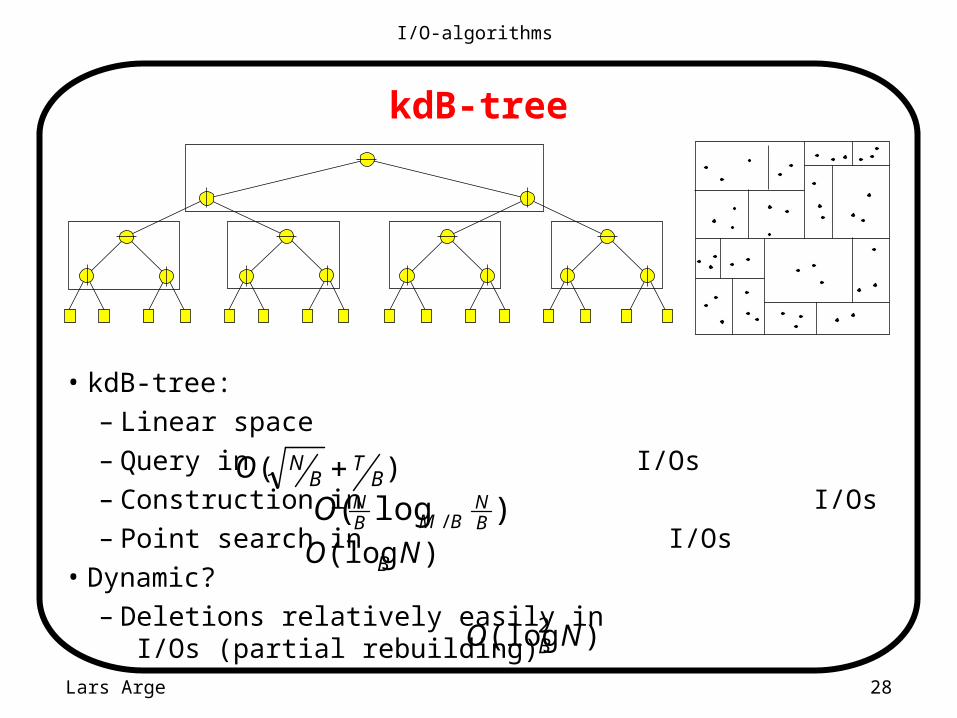
kdB-tree
• kdB-tree:
– Linear space
– Query in I/Os
– Construction in I/Os
– Point search in I/Os
• Dynamic?
– Deletions relatively easily in I/Os (partial rebuilding)
)( BT
BNO
)(log NO B
)log( / BN
BMBNO
)(log2 NO B

Lars Arge
I/O-algorithms
29
kdB-tree Insertion using Logarithmic Method
• Partition pointset S into subsets S0, S1, … Slog N, |Si| = 2i or |Si| = 0
• Build kdB-tree Di on Si
• Query: Query each Di
• Insert: Find first empty Di and construct Di out of
elements in S0,S1, … Si-1
– I/Os per moved point
– Point moved O(log N) times
I/Os amortized
..................................
0 2222 1 2 log N
iij
j 221 10
)()(log
02
BT
BN
BTN
i B OO ii
)log( 2/
2BBMB
ii
O )log( /1
BN
BMBO
)(log)loglog( 2/
1 NONO BBN
BMB

Lars Arge
I/O-algorithms
30
kdB-tree Insertion and Deletion• Insert: Use logarithmic method ignoring deletes
• Delete: Simply delete point p from relevant Di
– i can be calculated based on # insertions since p was inserted
– # insertions calculated by storing insertion number of each point in separate B-tree
extra update cost
• To maintain O(log N) structures Di
– Perform global rebuild after every Θ(N) updates
extra update cost
..................................
0 2222 1 2 log N
)(log NO B
)(log)log( /1 NOO BB
NBMB

Lars Arge
I/O-algorithms
31
Summary: kdB-tree
• 2d range searching in O(N/B) space
– Query in I/Os
– Construction in I/Os
– Updates in I/Os
• Optimal query among linear space structures
)( BT
BNO
)log( / BN
BMBNO
)(log2 NO B
q3
q2q1
q4
Lars Arge
I/O-algorithms
32
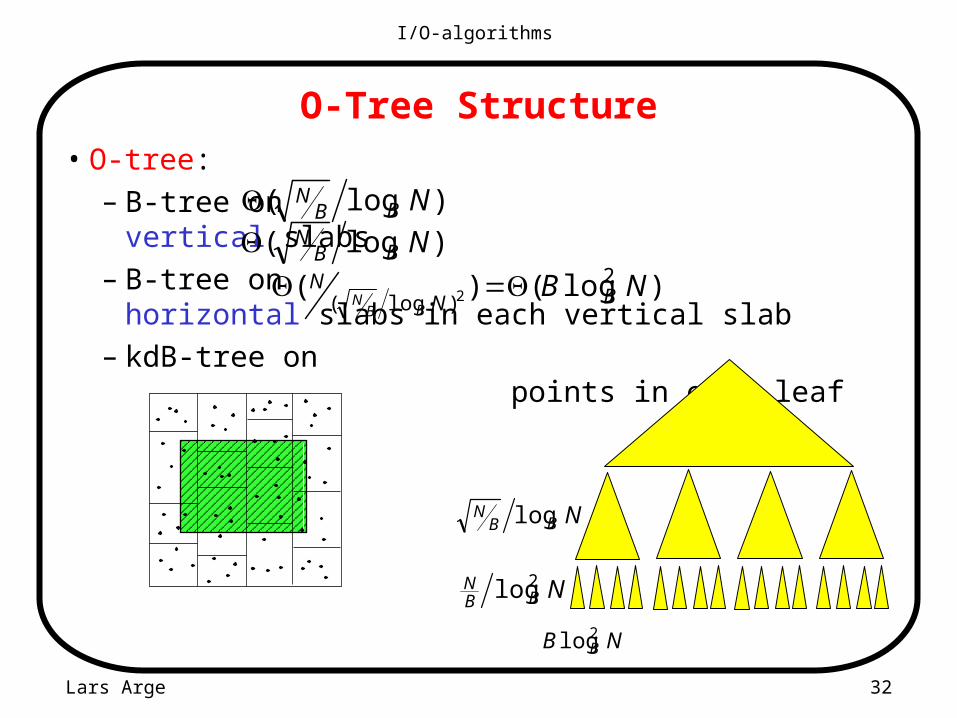
O-Tree Structure• O-tree:
– B-tree on vertical slabs
– B-tree on horizontal slabs in each vertical slab
– kdB-tree on points in each leaf
NBBN log
)log( NBBN
)log()( 2)log( 2 NB BN
NBB
N
NBBN 2log
)log( NBBN
NB B2log

Lars Arge
I/O-algorithms
33
O-Tree Query• Perform rangesearch with q1 and q2 in vertical B-tree
– Query all kdB-trees in leaves of two horizontal B-trees with x-interval intersected but not spanned by query
– Perform rangesearch with q3 and q4 horizontal B-trees with x-interval spanned by query
* Query all kdB-trees with range intersected by query
NBBN log
NBBN 2log
NB B2log

Lars Arge
I/O-algorithms
34
O-Tree Query Analysis• Vertical B-tree query:
• Query of all kdB-trees in leaves of two horizontal B-trees:
• Query horizontal B-trees:
• Query kdB-trees not completely in query
• Query in kdB-trees completely
contained in query:
I/Os
)())log((log BN
BBN
B ONO
)()()log()log( 2BT
BN
BT
BBBN OOBNBONO
)log( NO BBN
)())log((log)log( BN
BBN
BBBN ONONO
)()()log()log(2 2BT
BN
BT
BBBN OOBNBONO
)(BTO
)(BT
BNO
)log(2 NO BBN
Lars Arge
I/O-algorithms
35
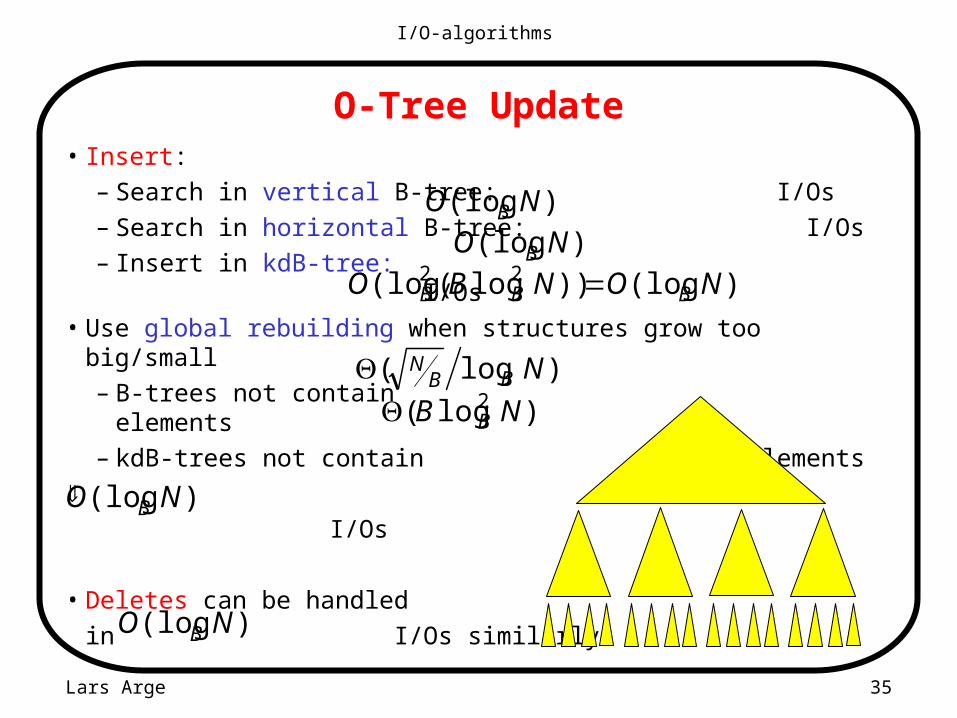
O-Tree Update• Insert:
– Search in vertical B-tree: I/Os
– Search in horizontal B-tree: I/Os
– Insert in kdB-tree: I/Os
• Use global rebuilding when structures grow too big/small
– B-trees not contain elements
– kdB-trees not contain elements
I/Os
• Deletes can be handled
in I/Os similarly
)log( NBBN
)log( 2 NB B
)(log NO B
)(log NO B
)(log))log((log 22 NONBO BBB
)(log NO B
)(log NO B

Lars Arge
I/O-algorithms
36
Summary: O-Tree• 2d range searching in linear space
– I/O query
– I/O update
• Optimal among structures
using linear space
• Can be extended to work in d-dimensions
with optimal query bound
q3
q2q1
q4
)(log NO B
)(BT
BNO
))((11
BT
BN dO

Lars Arge
I/O-algorithms
37
Summary/Conclusion: 3 and 4-sided Queries• 3-sided 2d range searching: External priority search tree
– query, space, update
• General (4-sided) 2d range searching:
– External range tree: query, space,
update
– O-tree: query, space, update
q3
q2q1
q3
q2q1
q4
)(loglog
logN
NBN
BB
BO)(log BT
B NO
)(BNO)( B
TB
NO
)(log NO B)(log BT
B NO
)(log NO B
)(loglog
log2
NN
BB
BO
)(BNO

Lars Arge
I/O-algorithms
38
Summary/Conclusion: Tools and Techniques• Tools:
– B-trees
– Persistent B-trees
– Buffer trees
– Logarithmic method
– Weight-balanced B-trees
– Global rebuilding
• Techniques:
– Bootstrapping
– Filtering
q3
q2q1
q3
q2q1
q4
(x,x)

Lars Arge
I/O-algorithms
39
Other results• Many other results for e.g.
– Higher dimensional range searching
– Range counting, range/stabbing max, and stabbing queries
– Halfspace (and other special cases) of range searching
– Queries on moving objects
– Proximity queries (closest pair, nearest neighbor, point location)
– Structures for objects other than points (bounding rectangles)
• Many heuristic structures in database community
Lars Arge
I/O-algorithms
40
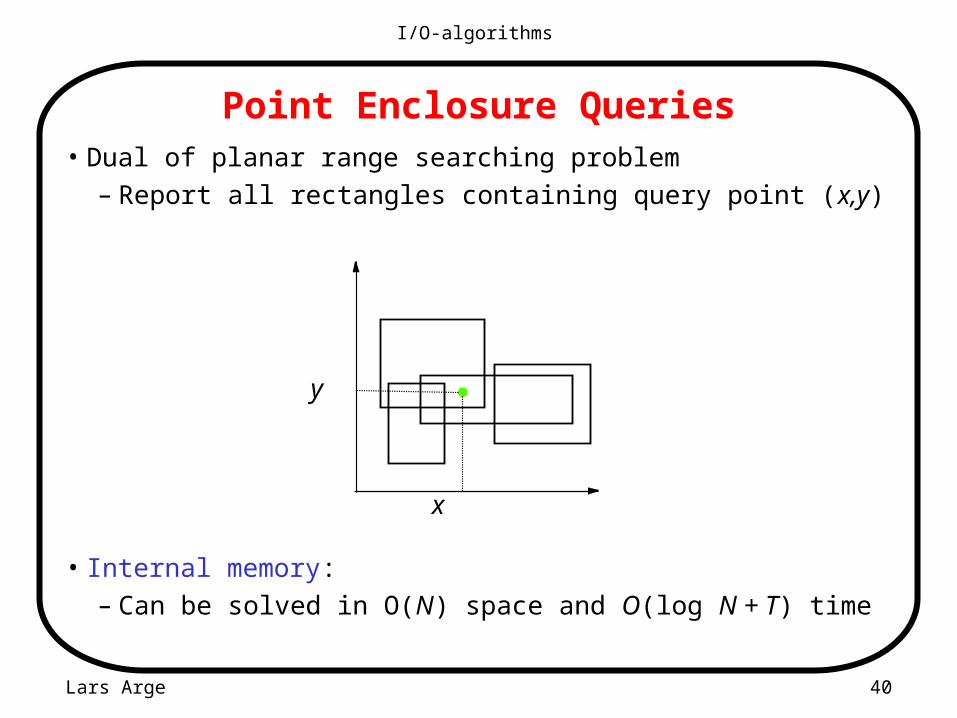
Point Enclosure Queries• Dual of planar range searching problem
– Report all rectangles containing query point (x,y)
• Internal memory:
– Can be solved in O(N) space and O(log N + T) time
x
y
Lars Arge
I/O-algorithms
41
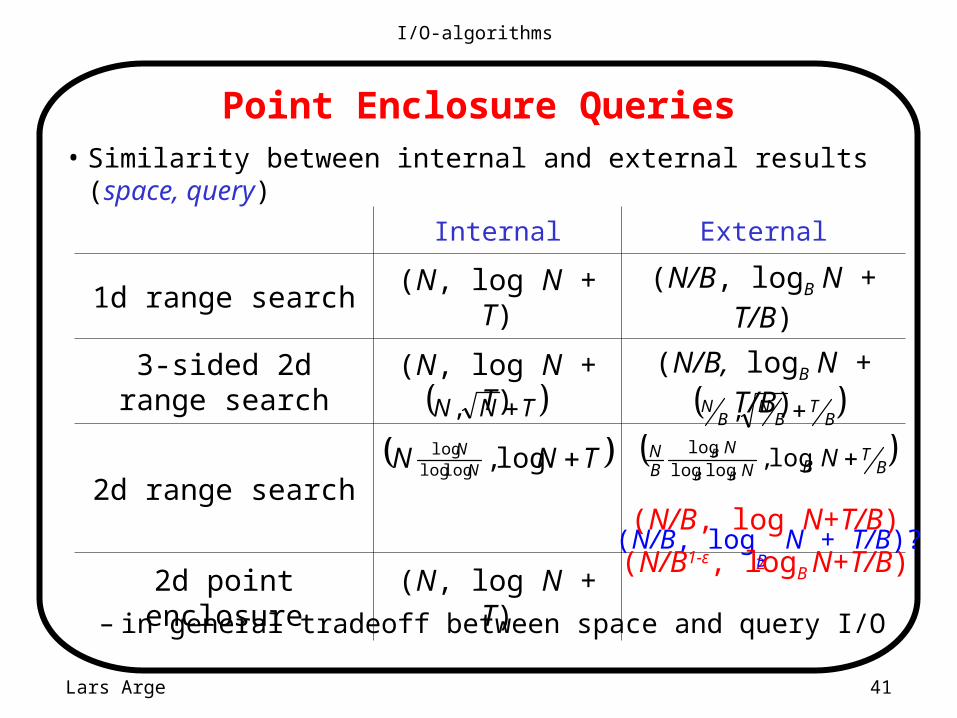
Point Enclosure Queries• Similarity between internal and external results (space, query)
– in general tradeoff between space and query I/O
Internal External
1d range search (N, log N + T) (N/B, logB N + T/B)
3-sided 2d range search (N, log N + T) (N/B, logB N + T/B)
2d range search
2d point enclosure (N, log N + T)
TNN NN log,loglog
log BT
BNN
BN N
BB
B log,loglog
log
TNN , BT
BN
BN ,
(N/B, log N + T/B)?2B
(N/B, log N+T/B)
(N/B1-ε, logB N+T/B)

Lars Arge
I/O-algorithms
42
Next Time: Rectangle Range Searching• Report all rectangles intersecting query rectangle Q
Q
Lars Arge
I/O-algorithms
43
References
• External Memory Geometric Data Structures
Lecture notes by Lars Arge.
– Section 8-9
Top Related