







Languages
Pages
Legal

1
Institute for Microtechnology - Technical University of Braunschweig - Germany
Gliederung
Einführung: Technik en miniatureBasis-Prozesse der MikrotechnologieSpezielle Technologien der MikromechanikDesign von MikrokomponentenMikrosensoren und MikroaktorenCase Studiesþ Piezoresistive Sensoren• Formgedächtnis-Aktoren• Magnetische Mikrosysteme• Optisches Mikrofon• Mikrofluidische Systeme• Mikroplasmaquellen
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistiver Effekt (1)
Änderung des elektrischen Widerstands unter dem Einfluss einer mechanischen Spannung:
ε⋅=Δ KRR
K-Faktor, Gauge-Faktor
Zwei Ursachen:Änderung der Geometrie des Widerstandes (vorzugsweise in Metallen)Änderung des Leitungsmechanismus (vorwiegend in Halbleitern)

2
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistiver Effekt (2)
ld
b
VV
VV
ll
RΔR
dd
bb
ll
VV
dd
bb
ll
RR
dblR
Δ−+
Δ=
Δ−
Δ+
Δ=
Δ+
Δ+
Δ=
Δ
Δ−
Δ+
Δ+
Δ=
Δ⋅
⋅=
ερρ
ρρ
ρρ
ρ
22
folgt
Mit
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistiver Effekt (3)
Spezifischer Widerstand in Metallen:
μμρ
⋅⋅=
⋅⋅=
NV
qqn11
n: Elektronendichteq: Elektronenladungμ: ElektronenbeweglichkeitN: Zahl der Elektronen
Damit folgt:
)()(2
und)()(
μμε
μμ
ρρ
⋅⋅Δ
−=Δ
⋅⋅Δ
−Δ
=Δ
NN
RR
NN
VV
• In Metallen sind N und μ weitgehend unabhängig von der Dehnung, d.h. der Werkstoffterm kann vernachlässigt werden, aus dem Geometrieterm folgt dann K=2
• Mikrotechnische Dehnungsmessstreifen werden auf die Membran aufgebracht, z.B. durch Sputtern, und photolithographisch strukturiert
• Materialien für Metall-DMS sind z.B.:Konstantan (60% Cu, 40% Ni), K=2PtIr (90% Pt, 10% Ir), K=6
• Wichtig ist auch die Auswahl des Membranwerkstoffs (Federwerkstoffs) bezüglich der elastischen Eigenschaften und des Temperatureffekts

3
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistiver Effekt (4)
Entdeckung 1954 durch C.S. Smith: In Halbleitern treten sehr viel größere K-Faktoren auf (bis ≈200).
Spezifischer Widerstand in Halbleitern:
)(1
pn pnq μμρ
⋅+⋅⋅=
n, p: Ladungsträgerdichteμn, μp : Ladungsträgerbeweglichkeiten
• Durch mechanische Spannungen wird die Gitterstruktur und damit die Bandstruktur des Halbleiters und letztendlich die Beweglichkeit der Ladungsträger verändert. Es treten unterschiedliche Effekte in Richtung der mechanischen Spannung und senkrecht dazu auf, d.h. der spezifische Widerstand ist anisotrop und muss in tensorieller Schreibweise dargestellt werden.
• Der Effekt hängt ab von der Kristallrichtung, der Temperatur und der Dotierung
• Der geometrische Effekt kann in Halbleitern im Allgemeinen vernachlässigt werden, d.h. es gilt:
ρρΔ
=ΔRR
Institute for Microtechnology - Technical University of Braunschweig - Germany
Ohmsches Gesetz in anisotropen Materialien (1)
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⋅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
3
2
1
332313
232212
131211
3
2
1
jjj
EEE
ρρρρρρρρρ
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
345
426
561
3
2
1
3
2
1
ρρρρρρρρρ
ρ
jjj
j
EEE
E = elektrisches Feld
= Stromdichte
symmetrischer Tensor des spezifischen Widerstands;Indexreduktion durch Voigt’sche Notation:
612513423
333222111
ρρρρρρρρρρρρ
======
4
Institute for Microtechnology - Technical University of Braunschweig - Germany
Ohmsches Gesetz in anisotropen Materialien (2)
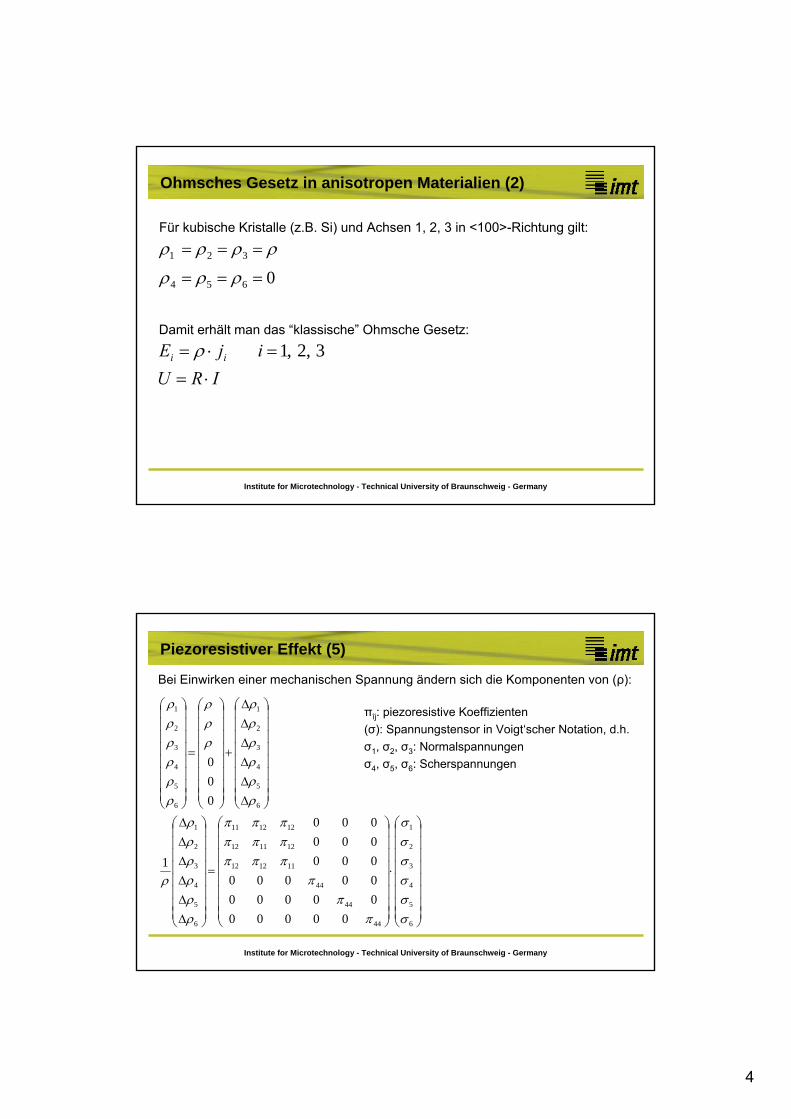
Für kubische Kristalle (z.B. Si) und Achsen 1, 2, 3 in <100>-Richtung gilt:
0654
321
===
===
ρρρ
ρρρρ
Damit erhält man das “klassische” Ohmsche Gesetz:
IRUijE ii
⋅==⋅= 3,2,1ρ
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistiver Effekt (5)
Bei Einwirken einer mechanischen Spannung ändern sich die Komponenten von (ρ):
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
⋅
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
ΔΔΔΔΔΔ
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
ΔΔΔΔΔΔ
+
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
=
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
6
5
4
3
2
1
44
44
44
111212
121112
121211
6
5
4
3
2
1
6
5
4
3
2
1
6
5
4
3
2
1
000000000000000000000000
1
000
σσσσσσ
ππ
ππππππππππ
ρρρρρρ
ρ
ρρρρρρ
ρρρ
ρρρρρρ πîj: piezoresistive Koeffizienten
(σ): Spannungstensor in Voigt‘scher Notation, d.h.σ1, σ2, σ3: Normalspannungenσ4, σ5, σ6: Scherspannungen

5
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistive Koeffizienten von Halbleitern
Material
n-Si
p-Si
n-Ge
p-Ge
n-GaAs
p-GaAs
n-InSb
11
8
1.5
1.1
0.005
0.004
0.002
-102.2
+6.6
-2.3
-3.7
-3.2
-12
-81.6
+53.4
-1.1
-3.2
+3.2
-5.4
-0.6
-114.2
-13.6
+138.1
-138
+96.7
-2.5
+46
+33
ρ [Ω cm] π11[10-11 Pa-1] π12 [10-11 Pa-1] π44 [10-11 Pa-1]
Institute for Microtechnology - Technical University of Braunschweig - Germany
Longitudinale und transversale piezoresistive Koeffizienten (1)
I U
Tσ
Lσ
Im Allgemeinen handelt es sich um längliche Dünnfilmwiderstände, d.h. elektrisches Feld und Stromdichte sind parallel und die mechanische Spannung kann zerlegt werden in Komponenten parallel und senkrecht dazu:
TTLL σπσπρρ ⋅+⋅=Δ
Longitudinaler und transversalerpiezoresistiver Koeffizient
6
Institute for Microtechnology - Technical University of Braunschweig - Germany
Longitudinale und transversale piezoresistive Koeffizienten (2)
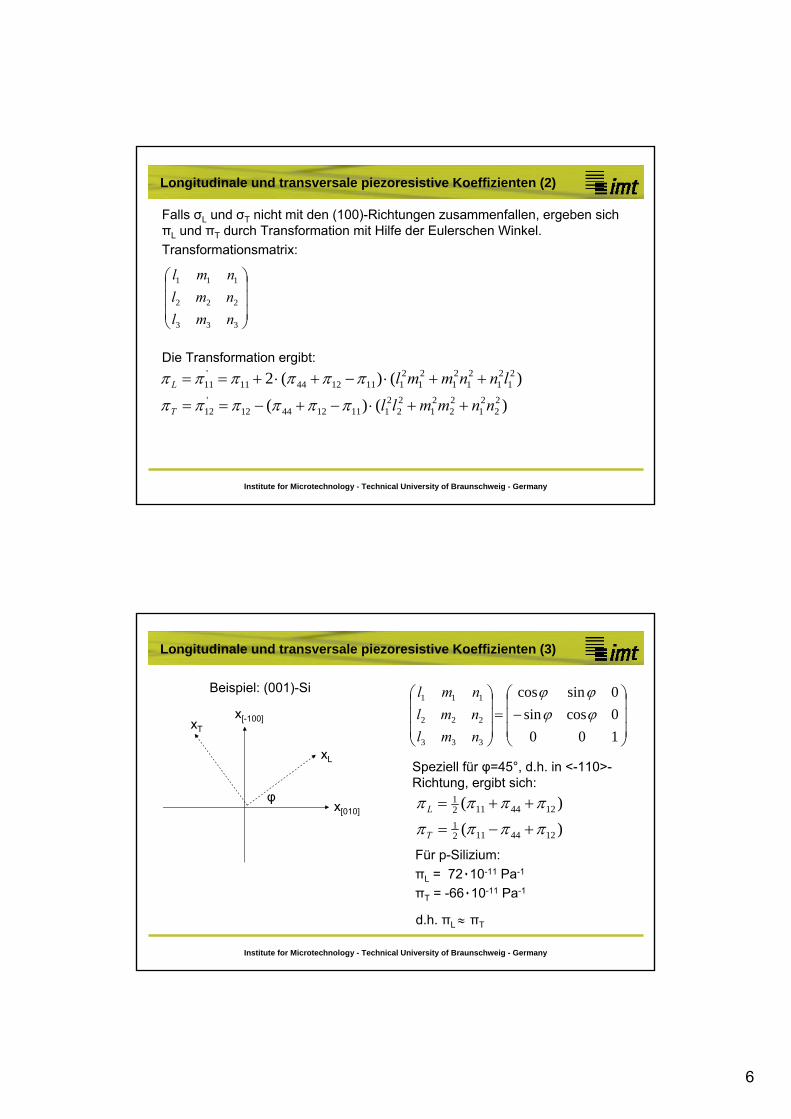
Falls σL und σT nicht mit den (100)-Richtungen zusammenfallen, ergeben sich πL und πT durch Transformation mit Hilfe der Eulerschen Winkel.Transformationsmatrix:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
333
222
111
nmlnmlnml
Die Transformation ergibt:
)()(
)()(222
21
22
21
22
2111124412
'12
21
21
21
21
21
2111124411
'11
nnmmll
lnnmml
T
L
++⋅−+−==
++⋅−+⋅+==
ππππππ
ππππππ
Institute for Microtechnology - Technical University of Braunschweig - Germany
Longitudinale und transversale piezoresistive Koeffizienten (3)
Beispiel: (001)-Si
φ
x[-100]
x[010]
xL
xT ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
1000cossin0sincos
333
222
111
ϕϕϕϕ
nmlnmlnml
Speziell für φ=45°, d.h. in <-110>-Richtung, ergibt sich:
)()(
12441121
12441121
ππππππππ
+−=
++=
T
L
Für p-Silizium:πL = 72٠10-11 Pa-1
πT = -66٠10-11 Pa-1
d.h. πL ≈ πT

7
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistive Koeffizienten in der (001)-Ebene von Si
Quelle: Y. Kanda, 1982
[10-11 Pa-1]
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezowiderstandsfaktor p(N,T) für Si (1)
Temperatur- und Dotierungsabhängigkeit:
π(N, T) = π0٠p(N,T)
Zu beachten:Hohe Dotierung bedeutet kleiner piezoresistiver Effekt (metallisches Verhalten).Temperaturabhängigkeit ist im interessanten Bereich (-50 °C … +125 °C) sehr groß, d.h. der Effekt ist stark temperaturabhängig.Betrachtungen gelten streng genommen nur für Bulk-Material. Für diffundierte Widerstände ist das Tiefenprofil der Dotierung zu berücksichtigen. Falls die Dicke der Widerstände gegenüber der Membrandicke nicht vernachlässigt werden kann, muss auch das Profil der mechanischen Spannung berücksichtigt werden,

8
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezowiderstandsfaktor p(N,T) für Si (2)
Quelle: Y. Kanda, 1982
N: DotierstoffkonzentrationT: Temperatur
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistive DrucksensorenFür kleine Membranauslenkungen(w << d) gilt:
=Δ=Δ
===
=−
=
Δ=
∂∂
+∂∂
∂+
∂∂
),,(
)1(12 2
3
4
4
22
4
4
4
pyxwpdvE
vEdD
Dp
yw
yxw
xw
Steifigkeit der Membran
E-Modul
Querkontraktionszahl
Membrandicke
Druckdifferent
Auslenkung der Membran
• Exakte Lösungen durch unendliche Reihen• Näherungslösungen z.B. mittels FEM• Aus folgen die Biegemomente:),,( pyxw Δ
)(
)(
2
2
2
2
2
2
2
2
xwv
ywDM
ywv
xwDM
y
x
∂∂
⋅+∂∂
−=
∂∂
⋅+∂∂
−=
• Aus den Biegemomenten werden die Spannun-gen in der Membran berechnet
• σ ist Null in der Mittelebene und steigt linear zummaximalen Wert an der Oberfläche an:
22
66dM
dM y
yx
x == σσ
• An der Unter- und Oberseite der Membran hat die Spannung den gleichen Betrag, aber unter-schiedliches Vorzeichen
9
Institute for Microtechnology - Technical University of Braunschweig - Germany
Quadratische Membran
Ep
da
dpw
dw Δ
⋅⎟⎠⎞
⎜⎝⎛⋅=
Δ=
40
2225,0),0,0(
pda
yx Δ⋅⎟⎠⎞
⎜⎝⎛⋅=
2
, 253,0)0,0(σ
Die maximale Spannung tritt in derMitte der Seiten auf:
)2
,0(2
24,1)0,2
(2 ap
daa
yx σσ =Δ⋅⎟⎠⎞
⎜⎝⎛⋅=
Allseitig eingespannte quadratische Membran der Kantenlänge a
Beispiel: a = 3 mm, d = 30 µm, (001)-Si, Δp = 1 kPa → w0 = 0,0108 d = 0,32 µm, σx,y(0,0) = 1,32 MPa, σx(a/2,0) = σy(0,a/2) = 3,1 MPa, σx(0,a/2) = σy(a/2,0) = 0,93 MPa
Institute for Microtechnology - Technical University of Braunschweig - Germany
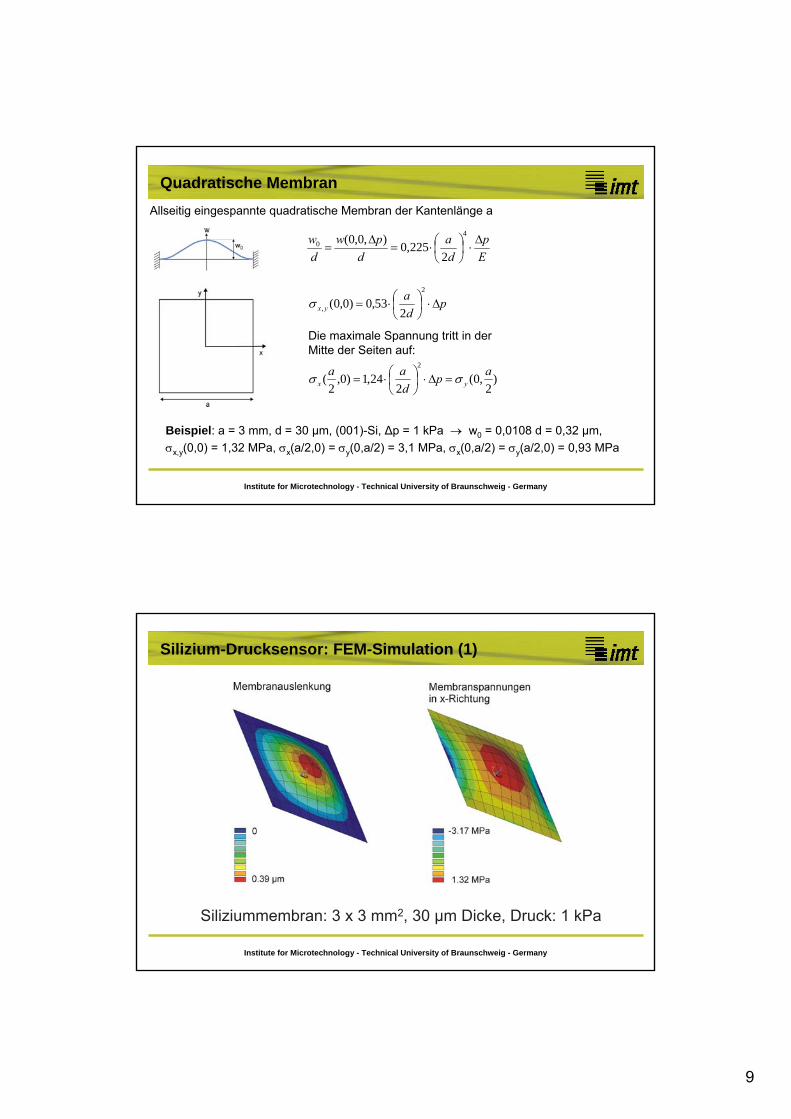
Silizium-Drucksensor: FEM-Simulation (1)
Siliziummembran: 3 x 3 mm2, 30 µm Dicke, Druck: 1 kPa

10
Institute for Microtechnology - Technical University of Braunschweig - Germany
Messung kleiner Drücke
Für allseitig eingespannte Membranen gilt:
pdap
da
dw
Δ⋅⎟⎠⎞
⎜⎝⎛∝Δ⋅⎟
⎠⎞
⎜⎝⎛∝
24
σ
Um bei kleinen Drücken nicht an Empfindlichkeit zu verlieren, wird man σ konstant halten, d.h. a/d muss größer werden, d.h. d wird verkleinert. Dann wird auch w/d größer, und es besteht die Gefahr, dass man den linearen Bereich (w/d<<1) ver-lässt. Lösung: Erhöhung der Steifigkeit der Membran durch Strukturen, die mit Hilfe der Bulk-Mikromechanik hergestellt werden (Boss). Dadurch wird die Auslenkung bei gleicher Spannung σ geringer
Institute for Microtechnology - Technical University of Braunschweig - Germany
Typical Low Pressure Geometries for Si Piezoresistive Sensors

11
Institute for Microtechnology - Technical University of Braunschweig - Germany
Silizium-Drucksensor: FEM-Simulation (2)
Siliziummembran: 3 x 3 mm2, 30 µm Dicke, mit Boss; Druck: 1 kPa
Institute for Microtechnology - Technical University of Braunschweig - Germany
Dünnfilm-DMS auf einer Kreismembran
12
Institute for Microtechnology - Technical University of Braunschweig - Germany
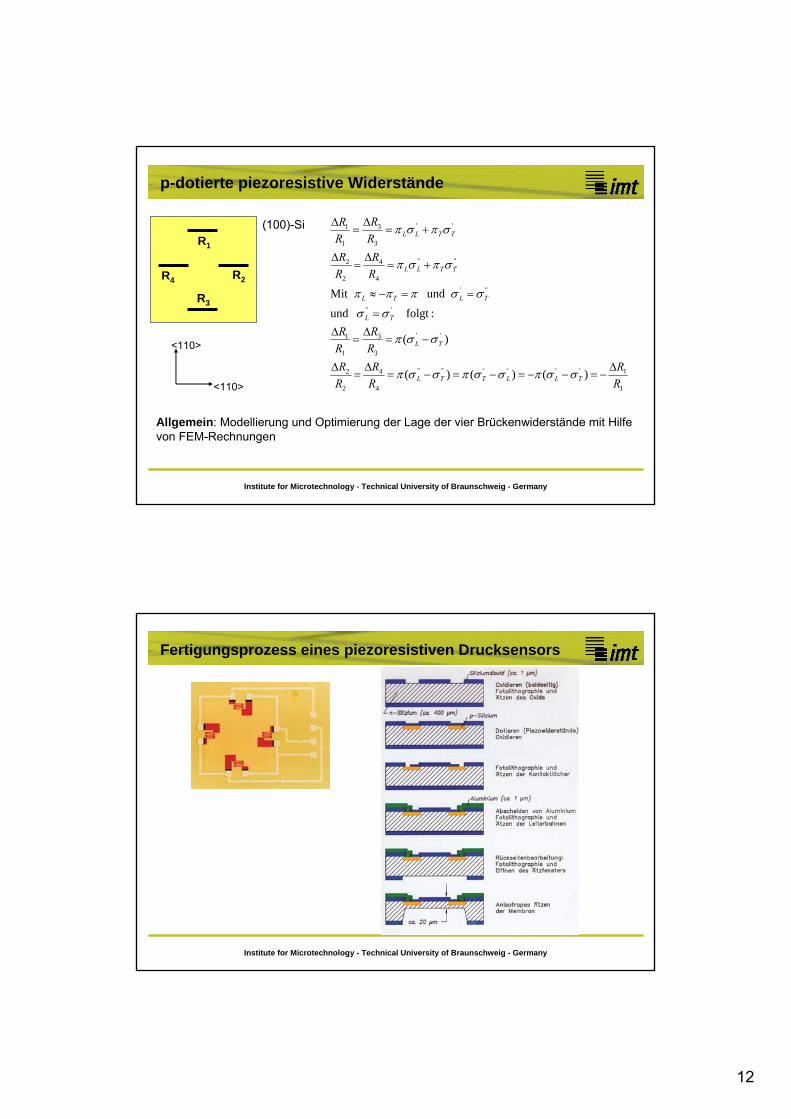
p-dotierte piezoresistive Widerstände
R1
R3
R2R4
(100)-Si
<110>
<110> 1
1''''""
4
4
2
2
''
3
3
1
1
'"
"'
""
4
4
2
2
''
3
3
1
1
)()()(
)(
:folgtund
undMit
RR
RR
RR
RR
RR
RR
RR
RR
RR
TLLTTL
TL
TL
TLTL
TTLL
TTLL
Δ−=−−=−=−=
Δ=
Δ
−=Δ
=Δ
=
==−≈
+=Δ
=Δ
+=Δ
=Δ
σσπσσπσσπ
σσπ
σσ
σσπππ
σπσπ
σπσπ
Allgemein: Modellierung und Optimierung der Lage der vier Brückenwiderstände mit Hilfevon FEM-Rechnungen
Institute for Microtechnology - Technical University of Braunschweig - Germany
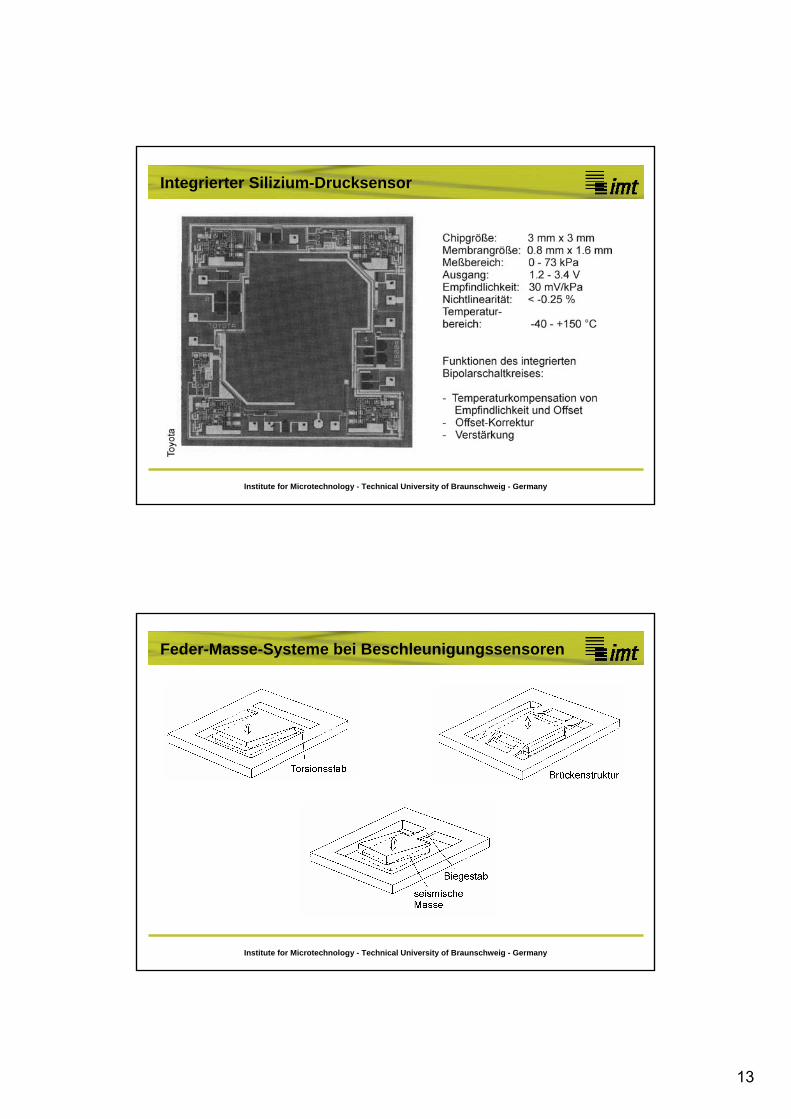
Fertigungsprozess eines piezoresistiven Drucksensors
13
Institute for Microtechnology - Technical University of Braunschweig - Germany
Integrierter Silizium-Drucksensor
Institute for Microtechnology - Technical University of Braunschweig - Germany
Feder-Masse-Systeme bei Beschleunigungssensoren

14
Institute for Microtechnology - Technical University of Braunschweig - Germany
Netzwerkmodelle
Eine große und wichtige Klasse von Systemen ist gekennzeichnet durch:lineare (oder linearisierbare) Beziehungen zwischen den Zustandsvariablendie Parameter, die diese Beziehungen beschreiben, sind zeitunabhängig
Solche Systeme können durch Netzwerkmodelle beschrieben werden. Dabei wirddie physikalische Struktur einer technischen Anordnung beschrieben durch die Beziehungen zwischen den Zustandsvariablendie Vielfalt der realen Bauelemente zurückgeführt auf wenige Grundtypen, die die Struktur bestimmter Differentialgleichungen abbildendie Vielzahl der möglichen Anregungsfunktionen ersetzt durch Standardzeitfunktionen, die die praktisch vorkommenden Zeitfunktionen hinreichend gut nachbilden und einer einfachen mathematischen Behandlung zugänglich sind
• Die Netzwerktheorie ist in der analogen Elektronik die dominierende Modellierungs-methode, kann aber auch eingesetzt werden für mechanische, akustische, thermi-sche und andere Probleme. Damit können auch mechanische Systeme mit Programmen simuliert werden, die für die Elektronik entwickelt wurden (z.B. SPICE)
Institute for Microtechnology - Technical University of Braunschweig - Germany
Analogiebeziehungen
Analogiebeziehungen zwischen elektrischen und translatorisch mechanischen Systemen

15
Institute for Microtechnology - Technical University of Braunschweig - Germany
Beispiel: Beschleunigungssensor (1)
v0(t), a0
d
Nachgiebigkeit n1 Nachgiebigkeit n2
Masse m
1
2
3
Elektrisches Ersatzschaltbild
~v0
m
n1 n2 vn
1
2
3
21
21
nnnnn
+=
Institute for Microtechnology - Technical University of Braunschweig - Germany
Beispiel: Beschleunigungssensor (2)Empfindlichkeit:
FnjvmjFvv
vjajv
ssd
vv
vjwjv
adS
nn
n
nn
ωω
ωω
ωω
==++
=−=−=Δ
⋅=⋅−=Δ
=
und0
:liefertelMaschenreg
und
wegen
11
0
0023
02
00
mnmnS
mnmn
mjnj
njvvn
2
2
2
0
1
11
:folgtEs
ω
ωω
ωω
ω
−=
−=
+−=
Falls eine Dämpfung der Feder berücksichtigt werdensoll, muss ein Widerstand parallel zur Induktivität ge-schaltet werden
0
0
)lg( 20ωS
⎟⎟⎠
⎞⎜⎜⎝
⎛
0
lgωω
2
0
20
220
0
1
11
:folgt1Mit
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=−
=
=
ωω
ωωω
ω
S
mn
022
020
020
020
für/
für
für1
ωωωωω
ωωω
ωωω
>>=
=∞=
<<=
S
S
S

16
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistiver Beschleunigungssensor (1)
Resonanzfrequenz:
Empfindlichkeit:
Beim Design muss ein Kompromiss zwischen hoher Empfindlichkeit und großer Resonanzfrequenz ge-funden werden
nmS
nm
⋅=∝
⋅=
20
0
1
1
ω
ω
Empfindlichkeit,Resonanzfrequenzund Auslenkung als Funktion der Dicke der Zunge
Institute for Microtechnology - Technical University of Braunschweig - Germany
Piezoresistiver Beschleunigungssensor (2)

17
Institute for Microtechnology - Technical University of Braunschweig - Germany
Micro Metrology
Current trend towards reduction of size in micro and nano technology
Need of tools for mechanical characterization of micro components
Dimensional metrology
Forces (µN ... mN)• Spring characteristics• Forces generated by micro actuators• Friction effects in micro actuators
Three-axial tactile micro sensor
Institute for Microtechnology - Technical University of Braunschweig - Germany
3D Tactile Micro Sensor
• Applied forces deformmembrane
• Piezoresistive elementsmeasure membranedeformation
Silicon membrane with bossstructure:• dimensions: 6.5 x 6.5 x 0.36 mm3
• membrane thickness: 20 – 30 µm
Tactile element:• stylus: 500 µm• ruby sphere: 120 µm

18
Institute for Microtechnology - Technical University of Braunschweig - Germany
Vertically Applied Load: FEM Simulation
F
compressive stresstensile stress
Institute for Microtechnology - Technical University of Braunschweig - Germany
Laterally Applied Load: FEM Simulation
F
compressive stresstensile stress

19
Institute for Microtechnology - Technical University of Braunschweig - Germany
Basic Design and Circuitry
x
Ub+
Udx
Udy
Udz
Ub-
R1x
R3x
R5x
R7x
R2x
R4x
R6x
R8x
R1y
R3y
R5y
R7y
R2y
R4y
R6y
R8y
R1z
R3z
R5z
R7z
R2z
R4z
R6z
R8z
R1y R2z R3y
R2y R1zR4y
R6x
R8z
R8x
R5x
R7z
R7x
R1x
R5z
R3x
R2x
R6z
R4x
R6y R3zR8y
R5y R4z R7y
y z
Resistors connected externallySensor chip fixed to a circuit board
Institute for Microtechnology - Technical University of Braunschweig - Germany
Re-Design
Uby+
Uby-
Ubx+
Ubx-
Ubz+
Ubz-
dUz1 dUz2
dUx1
dUx2
dUy1
dUy2
Resistors connected on chip
Re-Design Basic Design

20
Institute for Microtechnology - Technical University of Braunschweig - Germany
UV- radiation
silicon wafersilicon wafersilicon oxide (SiO2)silicon oxide (SiO2)photolithographyphotolithography
Fabrication
Institute for Microtechnology - Technical University of Braunschweig - Germany
silicon wafersilicon wafersilicon oxide (SiO2)silicon oxide (SiO2)photolithographyphotolithography
(SiO2) etching(SiO2) etching
Fabrication

21
Institute for Microtechnology - Technical University of Braunschweig - Germany
silicon wafersilicon wafersilicon oxide (SiO2)silicon oxide (SiO2)photolithographyphotolithography
(SiO2) etching(SiO2) etchingSi etching (KOH)Si etching (KOH)
Fabrication
Institute for Microtechnology - Technical University of Braunschweig - Germany
silicon wafersilicon wafersilicon oxide (SiO2)silicon oxide (SiO2)photolithographyphotolithography
(SiO2) etching(SiO2) etchingSi etching (KOH)Si etching (KOH)
silicon oxide (SiO2)silicon oxide (SiO2)photolithographyphotolithography
diffussiondiffussion
Fabrication

22
Institute for Microtechnology - Technical University of Braunschweig - Germany
silicon wafersilicon wafersilicon oxide (SiO2)silicon oxide (SiO2)photolithographyphotolithography
(SiO2) etching(SiO2) etchingSi etching (KOH)Si etching (KOH)
(SiO2)(SiO2)photolithographyphotolithography
diffussiondiffussionisolation (SiO2)isolation (SiO2)
photolithographyphotolithographysputter deposition (gold)sputter deposition (gold)
photolithographyphotolithographygold etchinggold etching
Fabrication
Institute for Microtechnology - Technical University of Braunschweig - Germany
Sensor Characteristics
stiffness:lateral 2 mN/µmvertical 48 mN/µm
output signal:lateral 0,40 mV/(V·µm)vertical 1,15 mV/(V·µm)
-5 0 5 10 15 20-100
0
100
200
300
400
500
600
700
800
vertically applied force laterally applied force
by 5 mm long stylus
appl
ied
forc
e [m
N]
Deflection [μm]deflection / µm
appl
ied
forc
e / m
N
-5 0 5 10 15 20-0,2
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
1,8
2,0
vertically applied force laterally applied force
by 5 mm long stylus
dU/U
B
Deflection [μm]deflection / µm
dU/U
B⋅1
02
sensitivity:lateral 0,2 mV/(V⋅mN)vertical 0,024 mV/(V⋅mN)

23
Institute for Microtechnology - Technical University of Braunschweig - Germany
Measurement of a Setting Ring Standard
Stylus: 15 mm longProbing sphere: 300 µm diameterProbing forces: below 1 mN
Diameter of setting ring standard:Dcal = 499.669 (18) µmDexp = 499.833 (39) µmDexp – Dcalc = 164 nm
Institute for Microtechnology - Technical University of Braunschweig - Germany
High Precision CMM
ZEISS/imt

24
Institute for Microtechnology - Technical University of Braunschweig - Germany
Calibration of Integrated Gripping Force Sensor
integrated force sensor
micro probe
2
2,5
3
3,5
4
-0,5 1,5 3,5 5,5 7,5 9,5 11,5
Force [mN]
Uout
[V]
Institute for Microtechnology - Technical University of Braunschweig - Germany
Characterisation of Micro Pneumatic Actuator
F
-0,02
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0,16
0,18
0 20 40 60 80 100 120
displacement [µm]
forc
e [m
N]
Spring constant of the micropneumatic piston bellow: 2 N/m
Pneumatically driven micro gripper
Top Related