






Languages
Pages
Legal


Control Systems Engineering LaboratoryCSEL
Daniel E. Rivera
Control Systems Engineering LaboratoryDepartment of Chemical Engineering
Arizona State UniversityTempe, Arizona 85287-6006
[email protected]://www.fulton.asu.edu/~csel
Engineering Control Approaches for the Design and Analysis of Adaptive Behavioral Interventions
1
Control Systems Engineering LaboratoryCSEL
Presentation Outline
• What are adaptive behavioral interventions?
• (Brief) overview of control systems engineering,
• Analysis and design of a hypothetical time-varying adaptive intervention based on the Fast Track program,
• Some challenges and opportunities; summary and conclusions.
2
Control Systems Engineering LaboratoryCSEL
Principal References
• Collins, L.M., S.A. Murphy, and K.L. Bierman, “A conceptual framework for adaptive preventive interventions,” Prevention Science, 5, No. 3, pgs. 185-196, Sept., 2004.
• Rivera, D.E., M.D. Pew, and L.M. Collins, “Using engineering control principles to inform the design of adaptive interventions: a conceptual introduction,” Drug and Alcohol Dependence, Special Issue on Adaptive Treatment Strategies, Vol. 88, Supplement 2, May 2007, Pages S31-S40.
• Rivera, D.E., M.D. Pew, L.M. Collins, and S.A. Murphy, “Engineering control approaches for the design and analysis of adaptive, time-varying interventions,” Technical Report 05-73, The Methodology Center, Penn State University; available electronically from
http://methcenter.psu.edu/
or from the ASU-CSEL website:
http://www.fulton.asu.edu/~csel/
3

Control Systems Engineering LaboratoryCSEL
Behavioral Interventions
• Behavioral interventions aim to prevent and treat disease by reducing unhealthful behaviors and promoting healthful ones.
• These play an increasingly prominent role in a wide variety of areas of public health importance, among them drug and alcohol abuse, cancer, mental health, obesity, HIV/AIDS, and cardiovascular health.
• Behavioral interventions can include both pharmacological (e.g., naltrexone) and behavioral (e.g., counseling, cognitive behavioral therapy, exercise) components. Likewise, these interventions can be designed to address multiple outcomes (i.e., co-morbidities).
• Adaptive interventions (in contrast to fixed interventions) represent an important emerging paradigm for delivering behavioral interventions intended to address chronic, relapsing disorders.
4
Control Systems Engineering LaboratoryCSEL
Adaptive Interventions(Collins, Murphy, and Bierman, Prevention Science, 5, No. 3, 2004)
• In an adaptive intervention, therapy is individualized by the use of decision rules that determine how the therapy level and type should vary according to measures of adherence, treatment burden and response (tailoring variables) collected during past treatment.
• An effective adaptive intervention may result in the following advantages over fixed interventions:
- Reduction of negative effects,- Reduction of inefficiency and waste,- Increased compliance,- Enhanced intervention potency
• Adaptive interventions can be a useful as part of efforts to disseminate efficacious interventions in real-world settings.
5
Control Systems Engineering LaboratoryCSEL
Control Systems Engineering
The field that considers how to manipulate or adjust system variables so that its behavior over time is transformed from undesirable to desirable,
• Open-loop: system behavior without a controller or decision rules (i.e., MANUAL operation).
• Closed-loop: system behavior once a controller or decision rule is implemented (i.e., AUTOmatic operation).
A well-tuned control system will effectively transfer variability from an expensive system resource to a less expensive one.
6
Control Systems Engineering LaboratoryCSEL
The “Shower” Control Problem
7
Control Systems Engineering LaboratoryCSEL
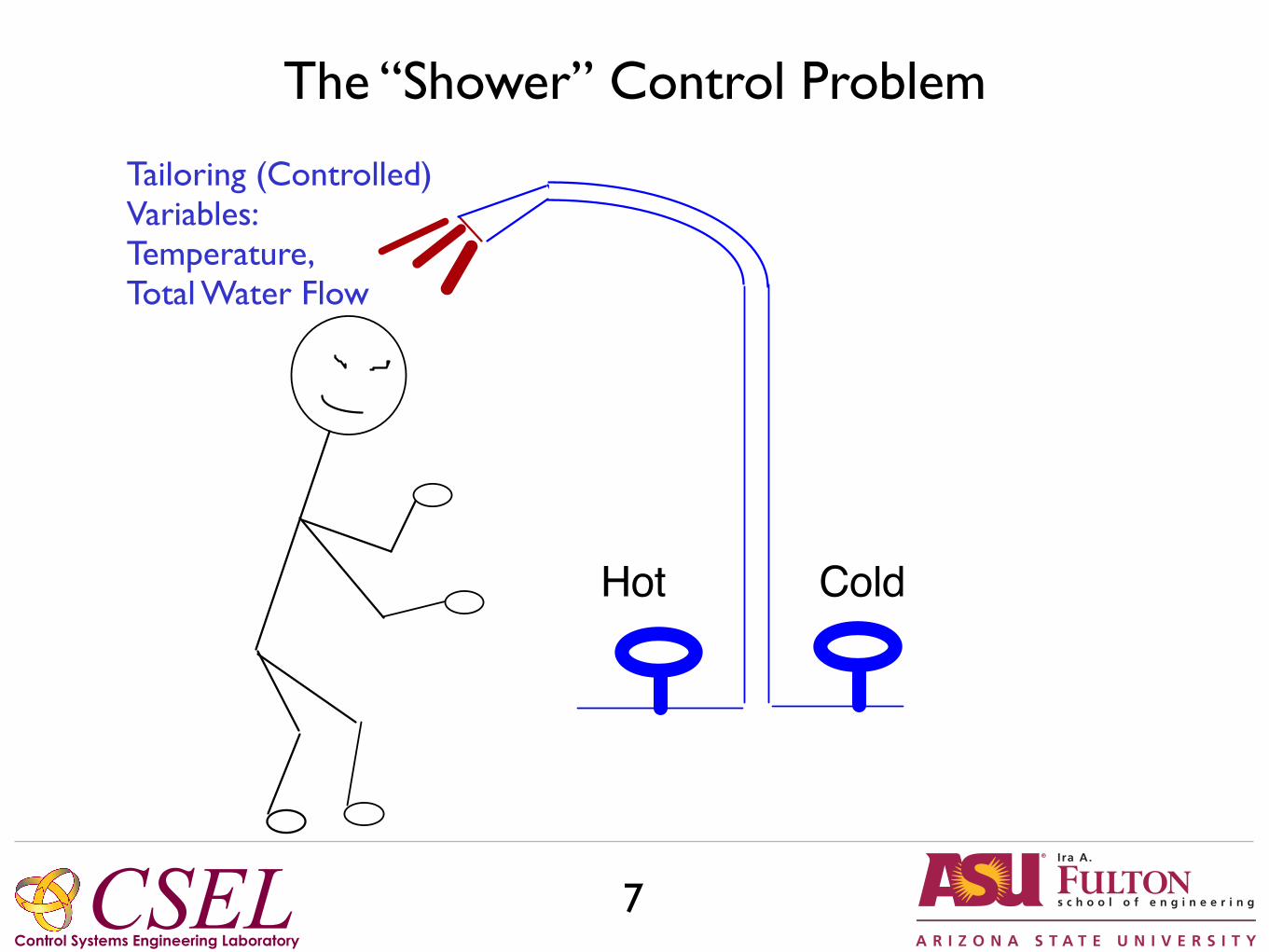
The “Shower” Control Problem
Tailoring (Controlled) Variables: Temperature, Total Water Flow
7

Control Systems Engineering LaboratoryCSEL
The “Shower” Control Problem
Tailoring (Controlled) Variables: Temperature, Total Water Flow
Intervention (Manipulated) Variables: Hot and ColdWater Valve Positions
7

Control Systems Engineering LaboratoryCSEL
The “Shower” Control Problem
Tailoring (Controlled) Variables: Temperature, Total Water Flow
Intervention (Manipulated) Variables: Hot and ColdWater Valve Positions
Exogenous (Disturbance) Variables:Inlet Water Flows,Temperatures
7

Control Systems Engineering LaboratoryCSEL
The “Shower” Control Problem
Tailoring (Controlled) Variables: Temperature, Total Water Flow
Intervention (Manipulated) Variables: Hot and ColdWater Valve Positions
Exogenous (Disturbance) Variables:Inlet Water Flows,TemperaturesThe presence of delay or
“transportation lag”makes this a difficult
controlproblem
7
Control Systems Engineering LaboratoryCSEL
Hot Cold
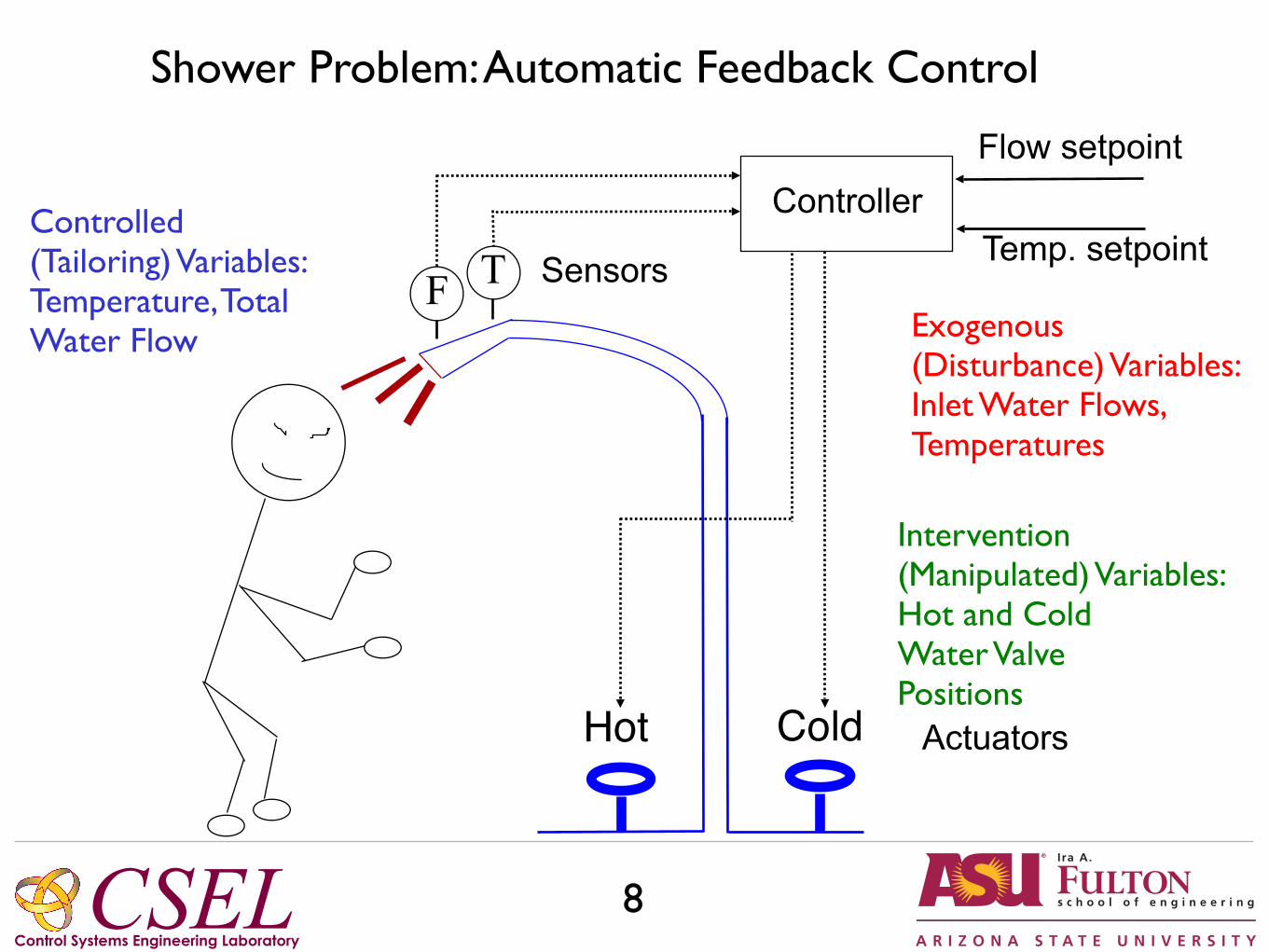
Controlled (Tailoring) Variables: Temperature, Total Water Flow
Intervention (Manipulated) Variables:Hot and ColdWater ValvePositions
Exogenous (Disturbance) Variables:Inlet Water Flows,Temperatures
Controller
F T Temp. setpoint
Actuators
Flow setpoint
Sensors
Shower Problem: Automatic Feedback Control
8
Control Systems Engineering LaboratoryCSEL
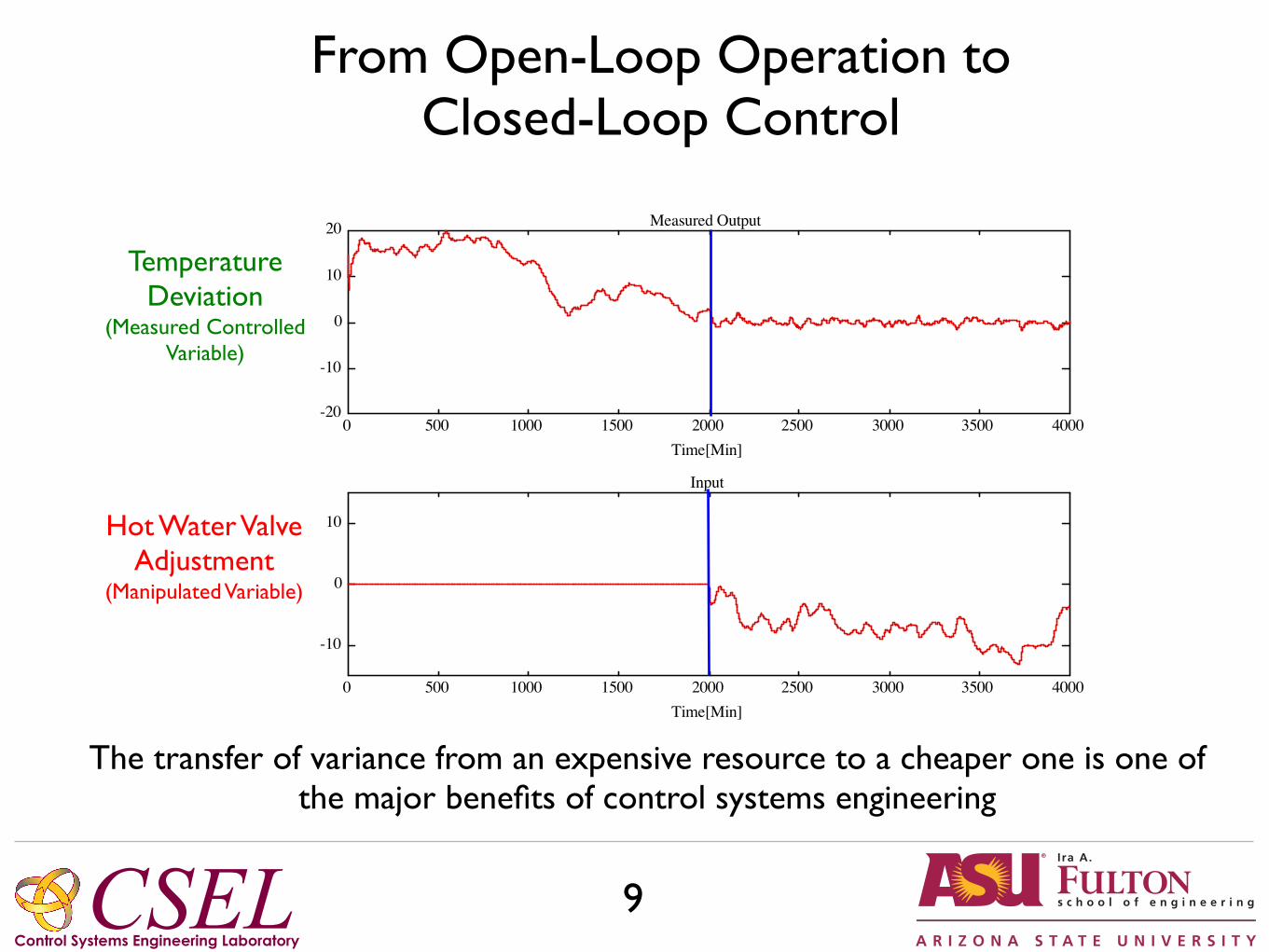
Temperature Deviation
(Measured Controlled Variable)
Hot Water Valve Adjustment
(Manipulated Variable)
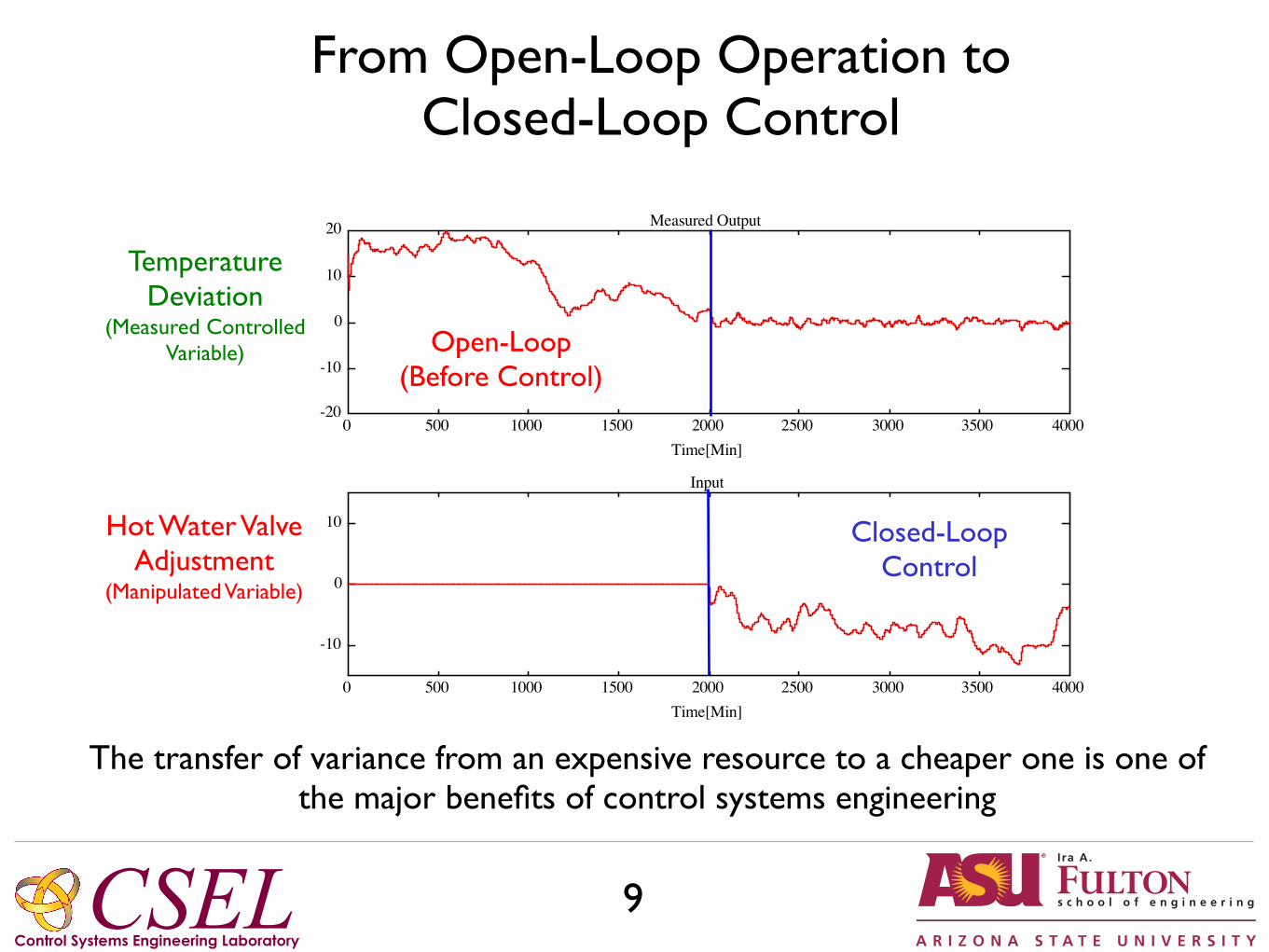
From Open-Loop Operation to Closed-Loop Control
The transfer of variance from an expensive resource to a cheaper one is one of the major benefits of control systems engineering
9

Control Systems Engineering LaboratoryCSEL
Open-Loop(Before Control)
Temperature Deviation
(Measured Controlled Variable)
Hot Water Valve Adjustment
(Manipulated Variable)
From Open-Loop Operation to Closed-Loop Control
The transfer of variance from an expensive resource to a cheaper one is one of the major benefits of control systems engineering
9
Control Systems Engineering LaboratoryCSEL
Open-Loop(Before Control)
Closed-LoopControl
Temperature Deviation
(Measured Controlled Variable)
Hot Water Valve Adjustment
(Manipulated Variable)
From Open-Loop Operation to Closed-Loop Control
The transfer of variance from an expensive resource to a cheaper one is one of the major benefits of control systems engineering
9
Control Systems Engineering LaboratoryCSEL
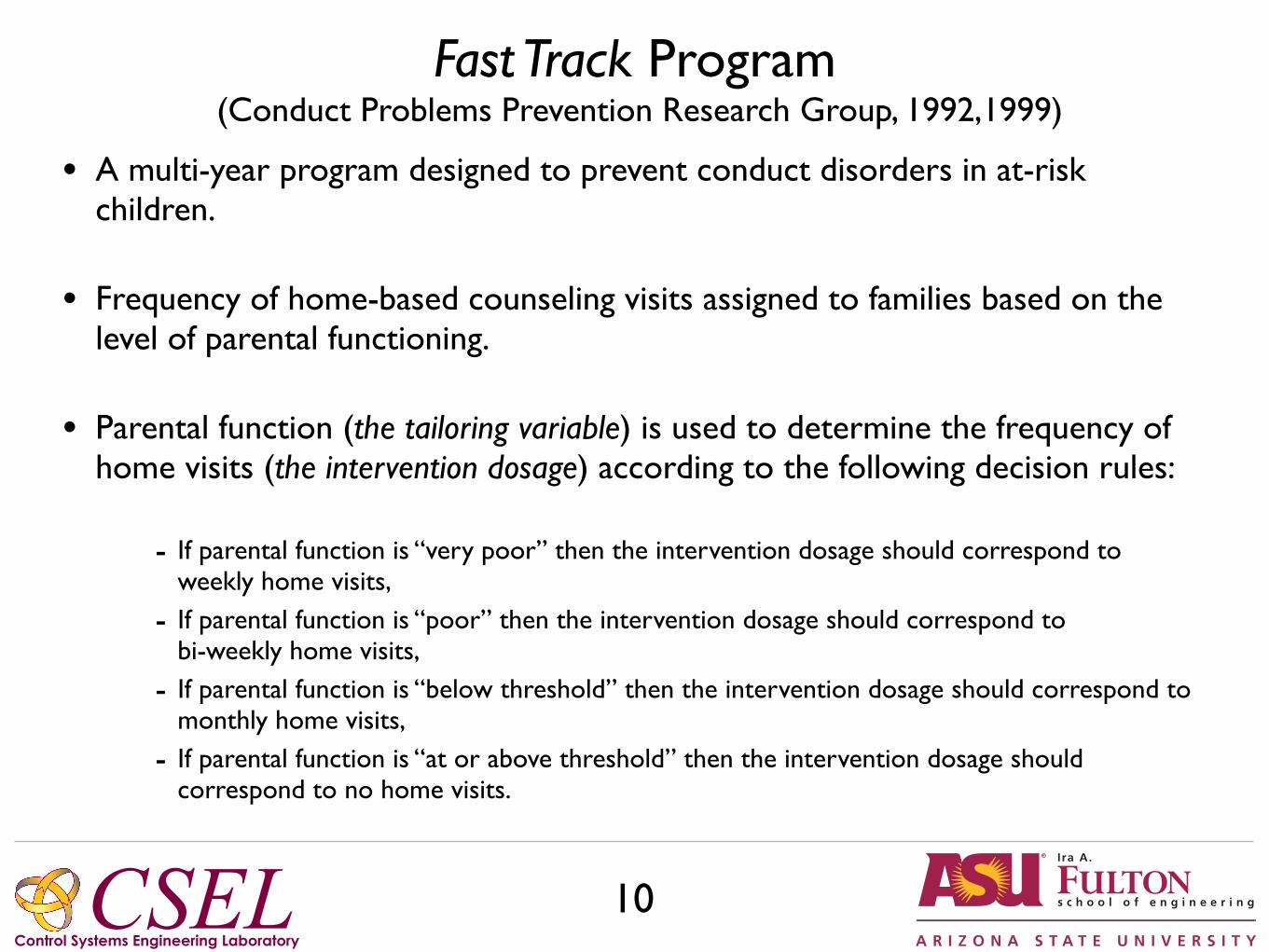
Fast Track Program (Conduct Problems Prevention Research Group, 1992,1999)
• A multi-year program designed to prevent conduct disorders in at-risk children.
• Frequency of home-based counseling visits assigned to families based on the level of parental functioning.
• Parental function (the tailoring variable) is used to determine the frequency of home visits (the intervention dosage) according to the following decision rules:
- If parental function is “very poor” then the intervention dosage should correspond to weekly home visits,
- If parental function is “poor” then the intervention dosage should correspond to bi-weekly home visits,
- If parental function is “below threshold” then the intervention dosage should correspond to monthly home visits,
- If parental function is “at or above threshold” then the intervention dosage should correspond to no home visits.
10
Control Systems Engineering LaboratoryCSEL
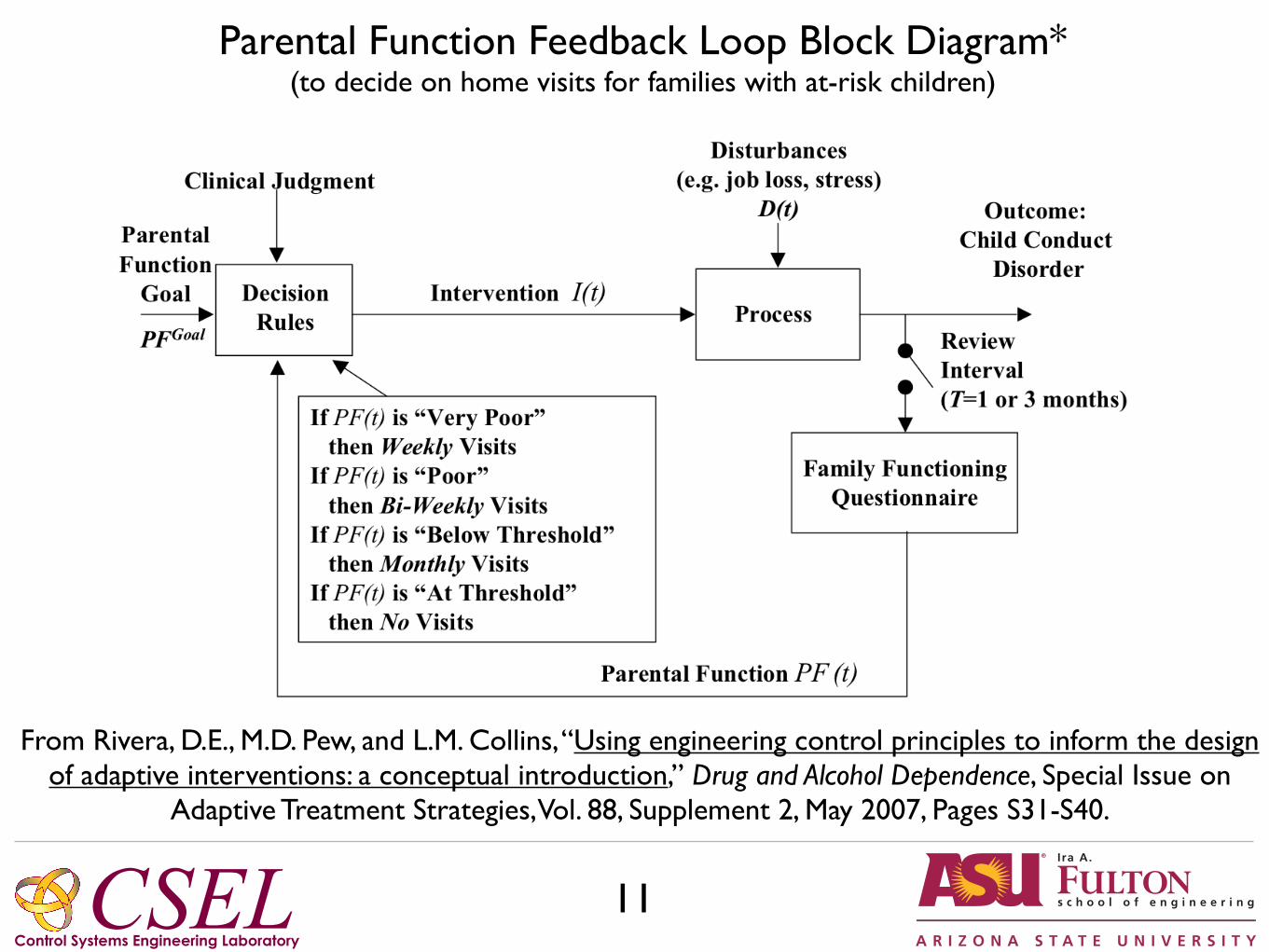
Parental Function Feedback Loop Block Diagram*(to decide on home visits for families with at-risk children)
11
From Rivera, D.E., M.D. Pew, and L.M. Collins, “Using engineering control principles to inform the design of adaptive interventions: a conceptual introduction,” Drug and Alcohol Dependence, Special Issue on
Adaptive Treatment Strategies, Vol. 88, Supplement 2, May 2007, Pages S31-S40.
Control Systems Engineering LaboratoryCSEL
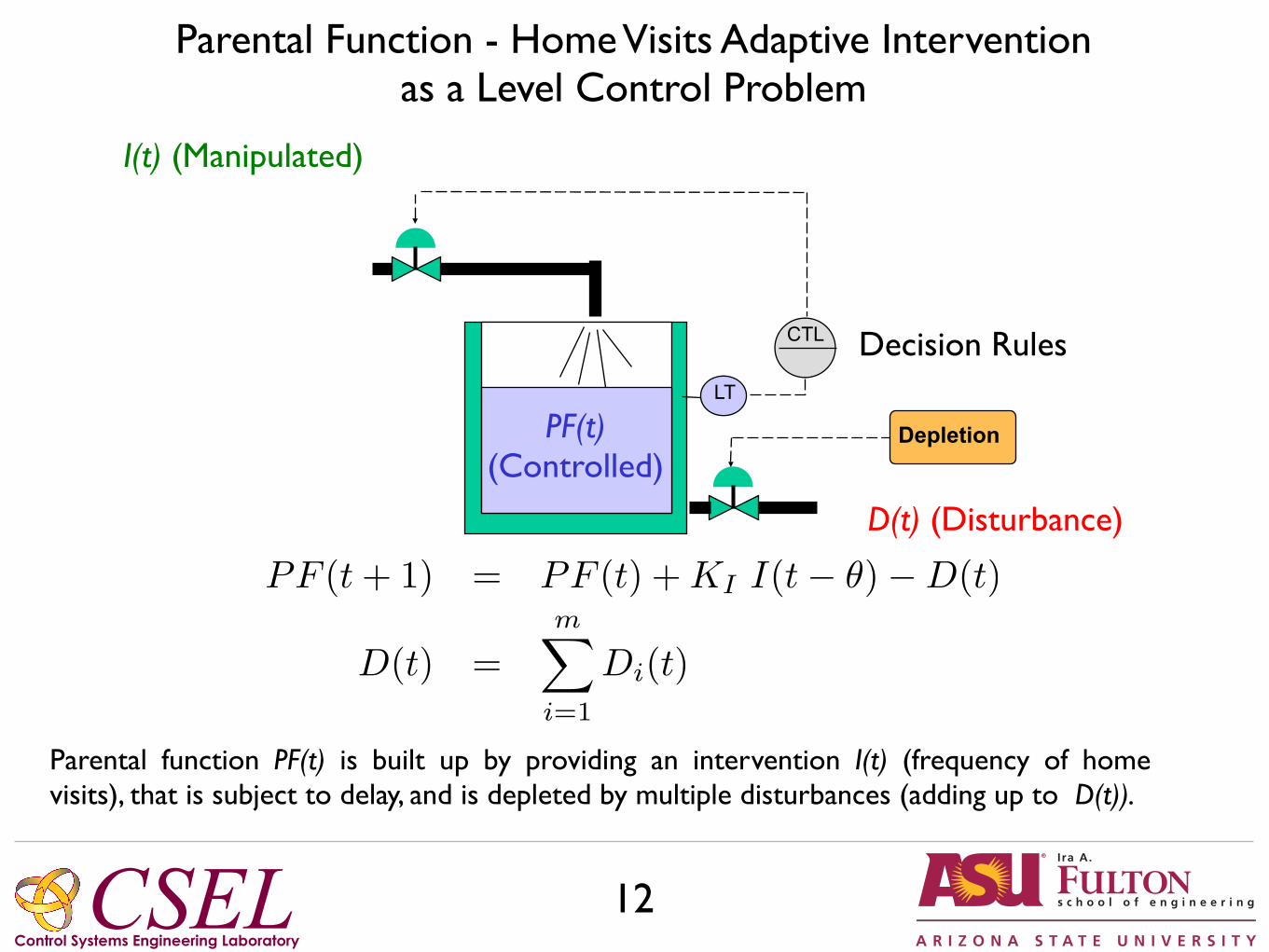
Parental function PF(t) is built up by providing an intervention I(t) (frequency of home visits), that is subject to delay, and is depleted by multiple disturbances (adding up to D(t)).
Parental Function - Home Visits Adaptive Intervention as a Level Control Problem
PF (t + 1) = PF (t) + KI I(t! !)!D(t)
D(t) =m!
i=1
Di(t)
LT
CTL
Depletion
D(t) (Disturbance)
I(t) (Manipulated)
PF(t) (Controlled)
Decision Rules
12
Control Systems Engineering LaboratoryCSEL
Parental Function “Open Loop” Dynamics
PF(t+1) = PF(t) + KI I(t – θ) - D(t) t = time, expressed as an integer reflecting review instance
KI = intervention gain
D(t) = depletion
I(t) = intervention dosage
θ = delay time
Parental Function (End of Review Instance)
= Parental Function (Start of Review Instance)
+ Parental Function Contributed by Intervention
- Parental Function Depletion
13

Control Systems Engineering LaboratoryCSEL
Parental Function Dynamics Modeling Challenges
• Quantitative models for supply mechanisms (how particular dosages of an intervention contribute to improving parental function) can be stochastic, nonlinear, and autoregressive in nature.
• Depletion mechanisms can be nonlinear, stochastic, and autoregressive as well; can be measured or unmeasured.
• The choice of review interval, designation of tailoring variables, and the selection of intervention dosage levels all play significant, important roles.
14

Control Systems Engineering LaboratoryCSEL
Simulation Details
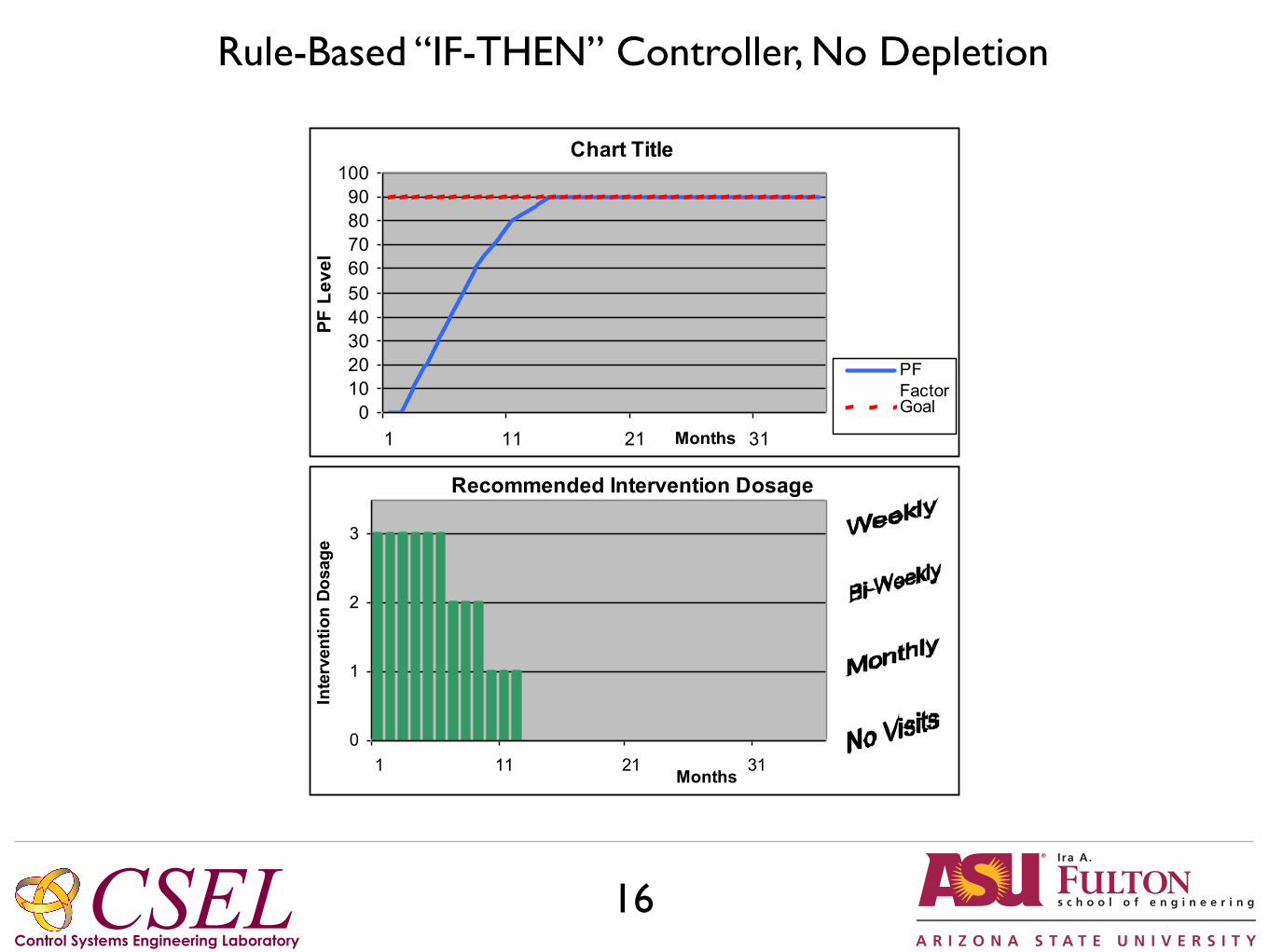
• Chose KI = 0.1 and θ=0
• Settings for PF levels, Intervention Strengths:
PF low = 33%, PFmedium = 67%, PF high = 90% I weekly = 100%, I biweekly = 67% , I monthly = 33%
• Goal = 90% parental function
• Intervention executed for 36 months with monthly simulation of the system dynamics and a quarterly (T = 3 months) review interval.
• Written in Excel. The Excel simulation used to generate these results can be downloaded from the ASU-CSEL website:
http://www.fulton.asu.edu/~csel/Software-AdaptIntSoft.htm
15
Control Systems Engineering LaboratoryCSEL
Rule-Based “IF-THEN” Controller, No Depletion
16

Control Systems Engineering LaboratoryCSEL
Rule-Based “IF-THEN” Controller, High Depletion Rate
17
} offset!

Control Systems Engineering LaboratoryCSEL
Engineering Control Design
• In general, controller structure will be a function of model complexity and the nature of the closed-loop performance requirements.
• We consider a tuning rule for a Proportional-Integral Derivative (PID) controller for an “integrating” system which relies on the concept of Internal Model Control (IMC; Rivera et al., 1986, Morari and Zafiriou, 1987).
• Controller design entails minimizing a 2-norm objective (based on the control error signal) which is detuned by a low-pass filter with adjustable parameters to guarantee physical realizability and robustness.
• User supplies the intervention gain (KI) and delay (θ) and a setting for an adjustable parameter (λ) that influences the speed of response and robustness of the closed-loop system.
18
Control Systems Engineering LaboratoryCSEL
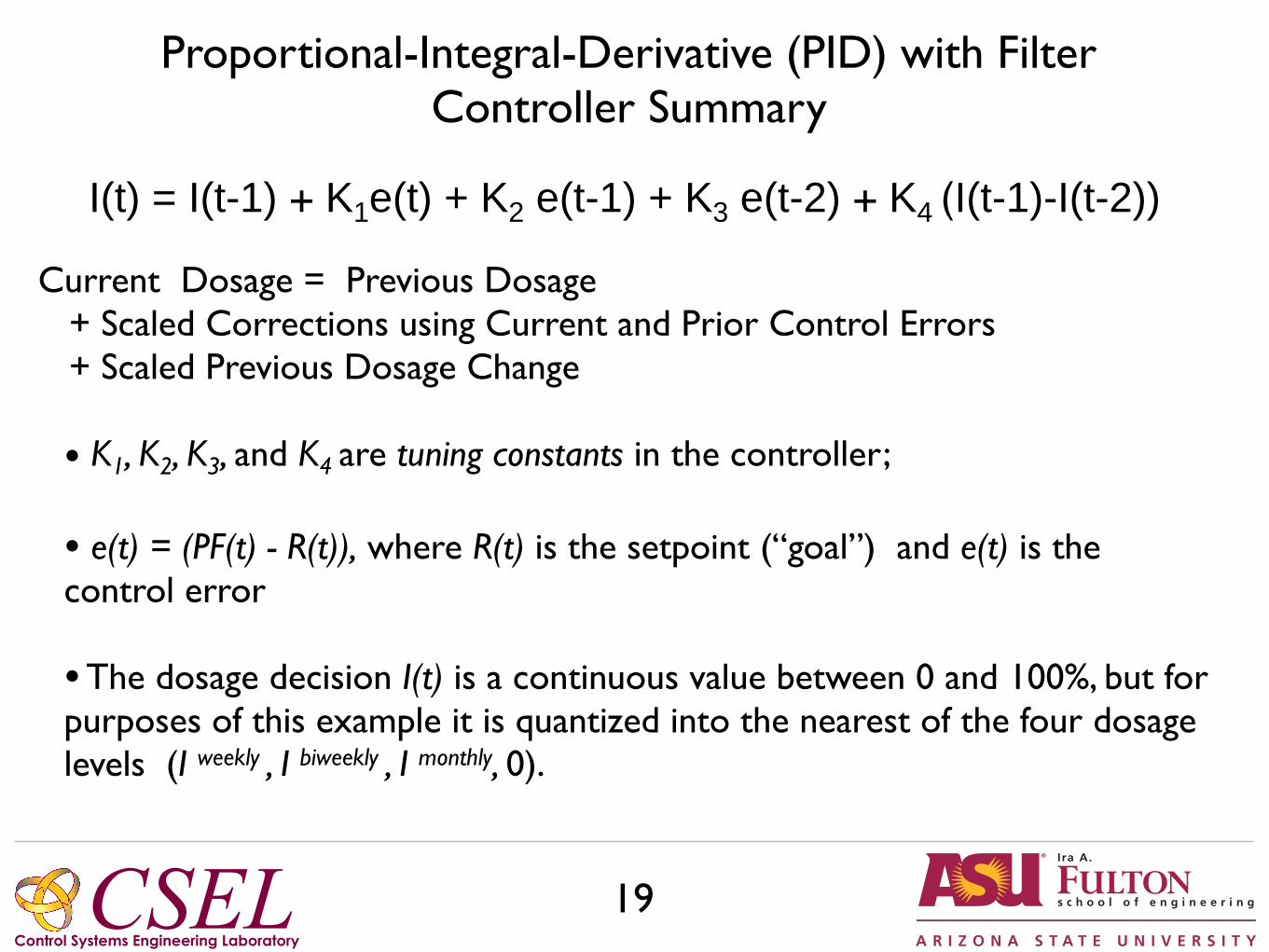
Proportional-Integral-Derivative (PID) with FilterController Summary
Current Dosage = Previous Dosage + Scaled Corrections using Current and Prior Control Errors + Scaled Previous Dosage Change
• K1, K2, K3, and K4 are tuning constants in the controller;
• e(t) = (PF(t) - R(t)), where R(t) is the setpoint (“goal”) and e(t) is the control error
• The dosage decision I(t) is a continuous value between 0 and 100%, but for purposes of this example it is quantized into the nearest of the four dosage levels (I weekly , I biweekly , I monthly, 0).
I(t) = I(t-1) + K1e(t) + K2 e(t-1) + K3 e(t-2) + K4 (I(t-1)-I(t-2))
19
Control Systems Engineering LaboratoryCSEL
K1 = TKc!F +T
!1 + T
!I+ !D
T
"K2 = ! TKc
!F +T
#1 + 2!D
T
$K3 = Kc!D
!F +T K4 = !F!F +T
Kc = 2(!+")+#KI(2!2+4!"+"2) !I = 2(" + #) + ! !D = 2#(!+")
2(!+")+# !F = !"22!2+4!"+"2
! = " = !2
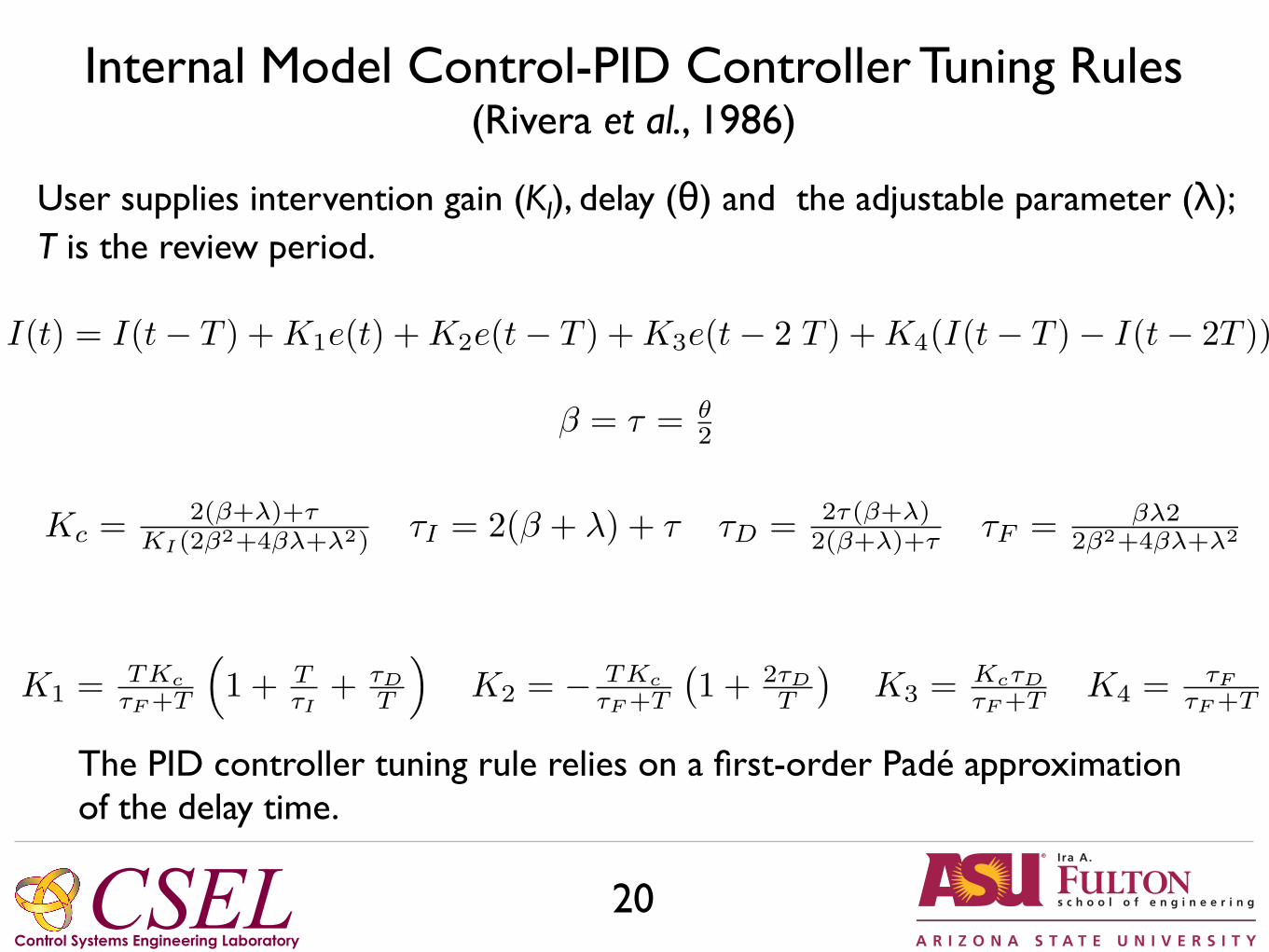
Internal Model Control-PID Controller Tuning Rules (Rivera et al., 1986)
User supplies intervention gain (KI), delay (θ) and the adjustable parameter (λ); T is the review period.
I(t) = I(t! T ) + K1e(t) + K2e(t! T ) + K3e(t! 2 T ) + K4(I(t! T )! I(t! 2T ))
20
The PID controller tuning rule relies on a first-order Padé approximation of the delay time.
Control Systems Engineering LaboratoryCSEL
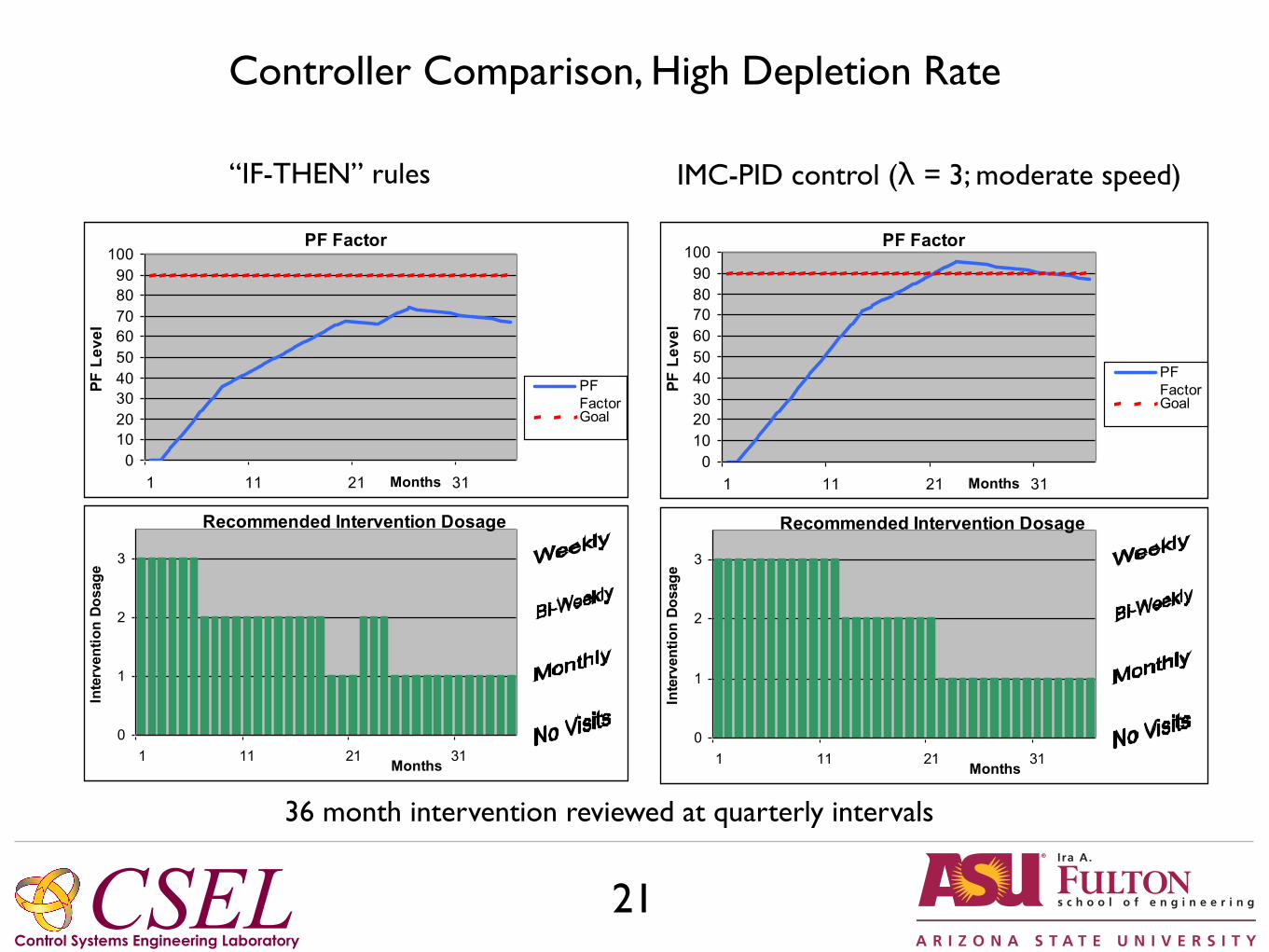
IMC-PID control (λ = 3; moderate speed)“IF-THEN” rules
36 month intervention reviewed at quarterly intervals
Controller Comparison, High Depletion Rate
21

Control Systems Engineering LaboratoryCSEL
IMC-PID Controller, Intermediate Depletion Rate,Various Controller Speeds (determined by λ)
Fast (λ = 1) Moderate (λ = 3) Slow (λ = 10)
22

Control Systems Engineering LaboratoryCSEL
Additional Cases (included in tech report)
• Measurement unreliability
• Nonlinear and stochastic values for both gain and delay in the open-loop model
The Excel simulation used to generate these results can be downloaded from the ASU-CSEL website:
http://www.fulton.asu.edu/~csel/Software-AdaptIntSoft.htm
A Model Predictive Controller formulated as a mixed-integer quadratic program represents a more computationally intensive yet ultimately superior approach to PID control.
23

Control Systems Engineering LaboratoryCSEL
Some Challenges and Opportunities
• Methods for obtaining “open-loop” models: novel clinical trial mechanisms intended to inform adaptive interventions, and means to simplify complex simulation models into forms useful for adaptive intervention design and analysis (system identification).
• Decision rules/control systems that deliver interventions involving multiple tailoring variables, multiple components, and constraints (model predictive control).
• Simulation environments that enable understanding the proper role between the adaptive intervention and clinical judgement.
• Optimizing interventions from a multi-level perspective (e.g., genetic, individual, family, community, national, and global).
24

Control Systems Engineering LaboratoryCSEL
From Glass, T.A. and M.J. McAtee (2006). “Behavioral science at the crossroads of public health: extending horizons, envisioning the future,” Social Science and Medicine, 62, 1650-1671.
Hierarchical Perspective on Behavioral Science
25

Control Systems Engineering LaboratoryCSEL
Summary and Conclusions
• Time-varying adaptive interventions constitute feedback control systems applied to uncertain, nonlinear dynamical processes, and can therefore benefit from a control engineering perspective.
• A hypothetical adaptive intervention based on Fast Track has been simulated using simple “IF-THEN” decision rules and compared to an engineering-based PID (Proportional-Integral-Derivative) controller.
• A fluid analogy, based on the principle of mass conservation, was useful in establishing a comparison between these control systems.
• The PID controller must be tuned for an acceptable response.
• Model Predictive Control formulations relying on models obtained from system identification procedures represent some of our current and future efforts on this important problem in public health.
26

Control Systems Engineering LaboratoryCSEL
Acknowledgments
• Linda M. Collins, Ph.D., The Methodology Center and Dept. of Human Development and Family Studies, Penn State University.
• Susan D. Murphy, Ph.D., Department of Statistics, Department of Psychiatry, and Institute for Social Research, University of Michigan.
• Michael D. Pew, B.S.I.E., M.S.E., Industrial Engineering, Arizona State University.
• Felipe Castro, Laurie Chassin, David MacKinnon, Irwin Sandler, and Steve West, Prevention Research Center, Arizona State University.
Support from NIH-NIDA (National Institute on Drug Abuse) and NIH-OBSSR (Office of Behavioral and Social Sciences Research),
Grants 1K25DA021173 and 1R21DA024266
27
Control Systems Engineering LaboratoryCSEL
For Additional Reading and Viewing
• Drug and Alcohol Dependence, Special Issue on Adaptive Treatment Strategies, Vol. 88, Supplement 2, May 2007.
• SAMSI Summer 2007 Program on Challenges in Dynamic Treatment Regimes and Multistage Decision-Making, June 18-29, 2007.
http://www.samsi.info/programs/2007adaptivetreatmentprogram.shtml
• 2007 NIH-OBSSR Symposia Series on Systems Science and Health
http://obssr.od.nih.gov/Content/Lectures+and+Seminars/Systems_Symposia_Series/SEMINARS.htm
• Complex Systems Approaches to Population Health, May 30-31, 2007, U. of Michigan (http://sitemaker.umich.edu/complexsystemspopulationhealth/home)
• Rivera D.E., M. Morari, and S. Skogestad, “Internal model control: PID controller design,” Ind. Eng. Chem. Proc. Des. Dev., 1986, 25(1), 252-265.
28
Top Related