





Languages
Pages
Legal


Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Displacement Based Finite Element Analysis
Fi it l t l i i l d li t t l t i ll di t (iFinite element analysis involves modeling structural components using small, discrete (i.e., ”finite”) interconnected elements. A displacement interpolation function is assigned to each finite element and every element is directly or indirectly connected to all other elements through common interfaces that are typically nodes, and/or common boundaries (lines or g yp y (surfaces).
The total set of equations obtained by describing the physical behavior of these nodes represents a system of equations that is best described in a matrix format The solution stepsrepresents a system of equations that is best described in a matrix format. The solution steps are as follows:
1. Select the element type which infers the displacement function is specified 2. Discretize the component3. Define a constitutive relationship (stress – strain relationship)4. Assemble the element stiffness matrix5. Assemble the component, or global stiffness matrix6 Solve the system of equations for unknonwn nodal displacements6. Solve the system of equations for unknonwn nodal displacements7. Solve for Element Strains and Stresses
Before we start we review a few fundamentals of matrix algebra and elasticity.

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Matrix NotationGiven
nn
nn
xaxaxabxaxaxab
+++=+++=
KKKKK
K
K
22221212
12121111
in short hand the above equation appears as
nnnnnn xaxaxab +++= K2211
where
{ } [ ]{ }xab =
{ }
=bb
b 2
1
{ }
= n
n
aaaaaa
aK
K
22221
11211
{ }
=xx
x 2
1
nbK
nnnn aaa K
KKKK
21
nxK

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Review – Matrix Algebra
We will see that the finite element method requires solving large systems of linear equations using matrix algebra tools.
First, review matrix multiplication
×+××+××+×
92421102719261825176521
=
×+××+××+×
=
2554471047294628452109843
2x2 2x3 2x3
The above can be represented in a general format:
[A] [B] = [C]n x pm x n m x p

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
To review some basic matrix algebra, consider the following system of equations 8
9
10
equations
17462
=+=+
yxyx
5
6
7
(x,y)= (1,4)
or
17162 +−= xy
1
2
3
4
44+−= xy
0 1 2 3 4 5 60
In a matrix format the system of equations are represented as
[ ]{ } { }=
=
176
4112
bxaoryx
[ ] { }
=
=
=
176
,,4112
byx
xa

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
MATLAB code MATLAB t t
We can make use of MATLAB to solve the system of equations. Given below are the input commands and the resulting output.
MATLAB code
>> a = [2 1;1 4]
MATLAB output
a =2 1
>> b = [6;17]
2 11 4
b =>> b = [6;17] b 6
17
>> determinant = det(a) determinant =7
Note |a| ≠ 0
>> solution = a\b solution =1.00004.0000

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Now consider a different system of equations
1624 =+ yx 8
9
10
621624
=+=+
yxyx
4
5
6
7
or
6282
+−=+−=
xyxy
0 1 2 3 4 5 60
1
2
3
or
0 1 2 3 4 5 6
Here we can see clearly that the lines being represented by the equations are parallel. In a matrix format:
1624 [ ]{ } { }bxaoryx
=
=
6
161224
wherewhere[ ] { }
=
=
=
616
,,1224
byx
xa

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
MATLAB code MATLAB output
Again using of MATLAB to solve the system of equations leads to
a =4 22 1
>> a = [4 2;2 1]MATLAB code MATLAB output
2 1b =
166
>> b = [16;6]
6determinant =
0Warning: Matrix is singular to working
>> determinant = det(a)
>> solution = a\b g g gprecision.
solution =Note |a| = 0Inf
-InfNote |a| = 0

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Consider the solution of a system with three equations and three variables represented graphically in the following figure
2.5
3
MATLAB Code:
>> a=[-1 1 2;3 -1 1;3 3 1]
MATLAB Output:
a =-1 1 2
1.5
2
>> b=[2;6;2]
-1 1 23 -1 13 3 1
b =
11.05
1.11.15
1 05
-1
-0.95
-0.91
[ ] b 262
0.90.95
1
-1.1
-1.05
>> solution=a\b solution =1-12
− 2211 x
2
=
−26
133113
zy

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Matrix Algebra Applied to FEA
For displacement based stress analysis
DKKKF 1112111 ...
=
n
DD
KKKKK
FF
MM
M
M2
1
2212
11211
2
1 ...
nnnnn DKKF
MMM
1 ...
Stiffness matrix -Symmetric since Kij = Kji
Nodal DisplacementsNodal Forces

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Matrix Transpose
– The transpose of a matrix is found by interchanging rows and columns, e.g.
[ ] [ ]
=
=
642531
654321
TAA
– Transpose of a product
65
[ ] [ ]( ) [ ] [ ]TTT ABBA =

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Matrix Differentiation
One can differentiate a matrix by differentiating every element of the matrix in theOne can differentiate a matrix by differentiating every element of the matrix in the conventional manner. Consider
[ ]
42
23 32 xxx
The derivative d[a]/dx of this matrix is
[ ]
=5
42
32
xxxxxxa
The derivative d[a]/dx of this matrix is
[ ]
3
2 343 xxad[ ]
=4
3
513144
xxx
dxad

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Similarly, one can take the partial derivative of a matrix as follows
[ ]
32 223 xyzxyx
[ ]
∂∂
=∂∂
32
52
42
zyxyyxzzxyy
xxa
=
00304
343
2
4
22
yzxz
yxzyx
In structural analysis we differentiate strain energy potential functions that have the form
y
xaa1
via matrix multiplication
[ ]
=
yx
aaaa
yxU2221
1211
21
( )22212
211 2
21 yaxyaxaU ++=

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Partial differentiation leads to
yaxaU1211 +=
∂ yx 1211∂
yaxayU
2212 +=∂∂
Or in matrix format
∂∂
xaaxU
1211
y∂
With U defined in t o dimensions from the pre io s page
=
∂∂∂
yx
aaaa
yUx
2221
1211
With U defined in two dimensions from the previous page
[ ]yx
aaaa
yxU21 1211
=
{ } [ ]{ }XaX
yaa
T
212 2221
=

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
then
[ ]{ }XU∂
Here xi represents x and y using index notation or
[ ]{ }Xaxi
=∂
{ }yx
xi
=
The above holds only if [a] is a symmetric matrix. We can do the same in three dimensions or in n-dimensions.
{ }X=

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Matrix Integration
One can differentiate a matrix by differentiating every element of the matrix in the y g yconventional manner. Consider
[ ]
= 3
2
144343
xxxx
a
The integration of this matrix is 23
[ ]
4513
144x
xxa
[ ]
=∫5
42
23
32
32
xxxxxxxxx
dxa
We often integrate the expression
[ ] [ ][ ] dddXAX T∫∫∫This triple product will be symmetric if [A] is symmetric
[ ] [ ][ ] dzdydxXAX∫∫∫

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Other Matrix Terminology
• Banded matrix– If all non-zero terms are contained within a band along the diagonal,
the matrix is said to be banded
• Sparse matrix– If a matrix has relatively few non-zero terms (as is common in FEA), y ( ),
the matrix is said to be sparse
• Singular matrixg– If the determinant of the matrix equals zero, the matrix is said to be
singular. As we saw, if [A] is singular, then the system of equations [A]{x}={b} has no unique solution.

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Stress at a PointOne can use the state of stress at aOne can use the state of stress at a point depicted by the cube at the right to demonstrate that equilibrium is defined by the indicial expression:
0=+∂
∂j
i
ij Bxσ
013
31
2
21
1
11 =+∂∂
+∂∂
+∂∂ B
xxxσσσ
In expanded notation:
0
0
332313
23
32
2
22
1
12
=+∂
+∂
+∂
=+∂∂
+∂∂
+∂∂
B
Bxxxσσσ
σσσ
03321
=+∂
+∂
+∂
Bxxx

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
In terms of a coordinate system labeled (x, y, z) then:
0=+∂∂
+∂
∂+
∂∂
xz
zx
y
yx
x
xx Bxxxσσσ
0
0
+∂
+∂
+∂
=+∂
∂+
∂
∂+
∂
∂
zzyzxz
yz
zy
y
yy
x
xy
B
Bxxx
σσσ
σσσ
0=+∂
+∂
+∂ z
z
zz
y
y
x
xz Bxxx

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Strain Displacement Relationships
F El i i h f ll i li l i hi b i d di l
∂ ∂∂∂1
From Elasticity the following nonlinear relationship between strain and displacement was derived
∂∂
∂∂
+∂
∂+
∂∂
=i
l
j
l
i
j
j
iij x
uxu
xu
xu
21ε
The nonlinear expression for the strain displacement relationship is utilized in the advanced course in Finite Element Analysis. The expression can be linearized as follows:
∂
∂+
∂∂
=i
j
j
iij x
uxu
21ε
We will utilize the linear form in this class.

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Define a Stress-Strain Relationship
Stress-strain relationships are key to producing results that are meaningful to the engineerStress strain relationships are key to producing results that are meaningful to the engineer. If we identify stress using indicial notation as follows:
σij – stress on the i’th face of the stress cube in the j’th direction
And strain as
∂
∂+
∂∂
= jiij x
uxu
21ε
Then in Elasticity or Continuum Mechanics we learned that stress is related to strain in the following manner.
∂∂ ij xx2
Here γijkl is a fourth order tensor of material constants. Refer to CVE 604 Elasticity notes posted to my web page. In a uniaxial format
klijklij εγσ =
p y p g
xx EorE εσεσ == 1111

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
In a matrix format stress is related to strain in the following manner:
However due to symmetry of the material, this 6 x 6 matrix is symmetric and populated by a number of zeroe entries.a u be o e oe e t es.

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Element Types
Initially we will categorize elements by their geometric nature, i.e.,:
1. Simple line elements (springs)
2 T di i l l t d t t l t i d l t2. Two dimensional elements used to represent plane strain and plane stress
3. Three dimensional elements (see figure)
4. Axisymmetric elementsy
The component being analyzed is discretized and a choice is made as to which type of element is used based onwhich type of element is used based on boundary conditions (loads and supports) as well other issues that will become evident as the course proceeds.

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Types of Elements - Examples
One-Dimensional ElementsLine, Rods, Beams, Trusses
Two-Dimensional ElementsTriangular, Quadrilateral
Plates, Shells, 2-D Continua
Three-Dimensional ElementsTetrahedral, Rectangular Prism (Brick)
3-D Continua

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Three DimensionalOne-Dimensional Frame Elements
Two-Dimensional Triangular Elements
Three-Dimensional Brick Elements

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Common Sources of Error in FEA
1. Domain Approximation
2 Element Interpolation/Approximation2. Element Interpolation/Approximation
3. Numerical Integration Errors(Including Spatial and Time Integration)
4. Computer Errors (Round-Off, Etc., )

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Measures of Accuracy and Convergence
Because FEA produces an approximate solution, we must establish metrics for accuracy. Consider the following generalized defintion for error (should we use precision?):
Error = |(Exact Solution) - (FEM Solution)||( ) ( )|
Thus we need methods that will speed convergence to the exact solution. We will limit error in one of two ways:
Increase the Number of Elements (h-convergence) (brute force approach)
or
Increase the Approximation Order (p convergence) (elegant approach)Increase the Approximation Order (p-convergence) (elegant approach)
Error will tend to zero as the number of elements, or the approximation order goes to infinity.

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
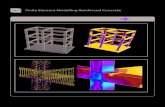
Two-Dimensional Discretization Refinement
(Node)•
(Discretization with 228 Elements)
(Triangular Element)•
•
(Discretization with 912 Elements)

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Displacement Interpolation FunctionsDisplacements throughout an element are defined by an interpolation function(s) that isDisplacements throughout an element are defined by an interpolation function(s) that is dependent on displacement of the nodes. These functions can be linear, quadratic or cubic polynomials. The linear displacement function for a spring element will have the form
For a two dimensional element the the displacement function is a function of the coordinates in is plane (either the x-y plane or the x1-x2 plane) The displacement
xccu 21 +=
coordinates in is plane (either the x y plane or the x1 x2 plane). The displacement functions are expressed in terms of the unknown nodal displacements, i.e., if nen is the number of element nodes, then the displacement at the ith node is defined as
{ } enxiyixii niqqqq ,,2,1,, L==
The displacement at any point within the element is then
{ } enxiyixii qqqq ,,,,,
{ } { }[ ]{ }
wvuu ,,=
Where [ f ] is a matrix of shape functions, which we will talk about in detail.
[ ]{ } eni niqf ,,2,1 L==

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
Element Stiffness Matrix
Three methods to determine element stiffness matrix:Three methods to determine element stiffness matrix:
1. Direct Equilibrium Method2. Work or Energy Method3. Methods of Weighted Residuals
Using any of the methods will produce the element stiffness matrix given in their matrix format as:format as:
n
n
dd
kkkkkk
ff
K
K
2
1
22221
11211
2
1
=
nnnnn
n
n dkkkf
fK
K
KKKKK2
21
222212

Section 2: FINITE ELEMENT ANALYSIS –FUNDAMENTALS
The individual stiffness matrix for each element in the discretized model must be
Global Stiffness Matrix
combined in some fashion in order to conduct the structural analysis of a component.
We will utilize superposition to accomplish this (often referred to as the direct stiffness method). Force equilibrium is imposed at each node and compatibility (continuity) is ) q p p y ( y)required at the nodes and along the boundaries of two and three dimensional elements. We will not allow the creation of new surfaces in this class (see Fracture Mechanics). This process produces a global force-displacement relationship for the component that appears as follows:appears as follows:
=
n
n
DD
KKKKKK
FF
K
K
2
1
22221
11211
2
1
=
nnnnnn DKKKFK
K
KKKKK
21
The matris [K], the global stiffnes matrix, is singular (its determinant is zero). To remove this singularity boundary conditions must be imposed. This will remove rigid body motion from the analysis.
Top Related