







Languages
Pages
Legal

1CONFIDENTIAL |© 2015 The MathWorks, Inc.CONFIDENTIAL
Design and Simulation of Robotics Systems
Dhirendra Singh
Application Engineer
Deepak Sharma
Sales Manager
TEQIP WORKSHOP ONADVANCED ROBOTICS at IIT KANPUR
15-19 MARCH, 2016
2CONFIDENTIAL |
Agenda
Physical modeling of Mechanical and Electrical systems o Simscape to model multi-domain systemso SimPowersystems to model power electronicso Importing CAD Modelso Multi-body dynamics simulation
Build Robotic system using Arduino, Lego and Turtleboto Kinematics / Inverse kinematics and dynamics analysis o Controller design & PID tuningo Working with embedded systems for auto code generation (Arduino, Lego and Turtlebot)
Neural network for Image processing applicationo Acquire live webcam image using image acquisition toolboxo Train a neural network

3CONFIDENTIAL |
Key Industries
Aerospace and Defense
Automotive
Biotech and Pharmaceutical
Communications
Education
Electronics and Semiconductors
Energy Production
Financial Services
Industrial Automation and
Machinery

4CONFIDENTIAL |
July 2014 News
IEEE Spectrum used 12 different metrics to compare
programming language popularity and use.
Data sources include Google CareerBuilder, and
Github.
The Right Language for the Task
5CONFIDENTIAL |
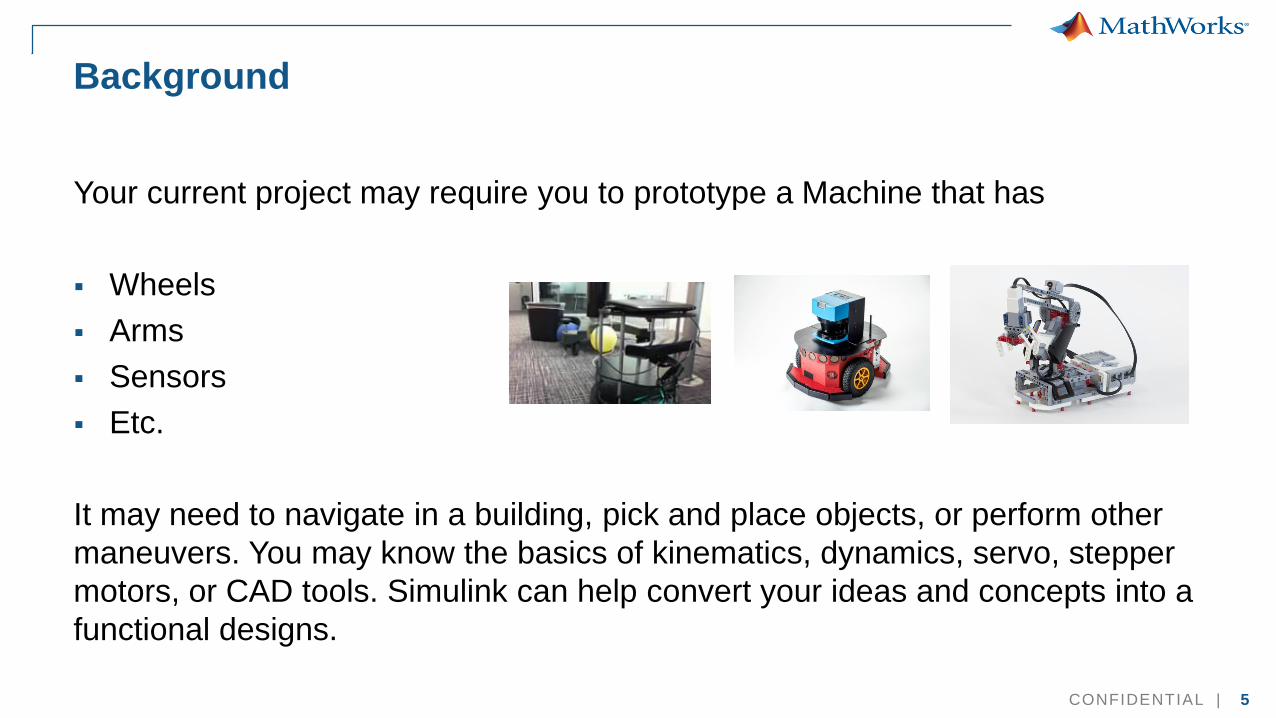
Background
Your current project may require you to prototype a Machine that has
Wheels
Arms
Sensors
Etc.
It may need to navigate in a building, pick and place objects, or perform other
maneuvers. You may know the basics of kinematics, dynamics, servo, stepper
motors, or CAD tools. Simulink can help convert your ideas and concepts into a
functional designs.

6CONFIDENTIAL |
Challenges
Three of the most critical questions that engineers and scientists need to
answer are:
• How do I design and simulate a
machine?
• How do I prototype and test
algorithms for my machine?
• How do I connect to my machine
platforms and peripherals?

7CONFIDENTIAL |
Example
DEMO: Path Planning and Navigation

8CONFIDENTIAL |
Importing CAD models
Open the CAD model in Simwise 4D
SimWise converts the CAD model into
SimMechanics convertible format (*.wm3)

9CONFIDENTIAL |
Automatically Create SimMechanics Models using
GetMechanics App
GetMechanics App can import
SimWise *.wm3 file
To get GetMechanics App
Contact MathWorks
10CONFIDENTIAL |
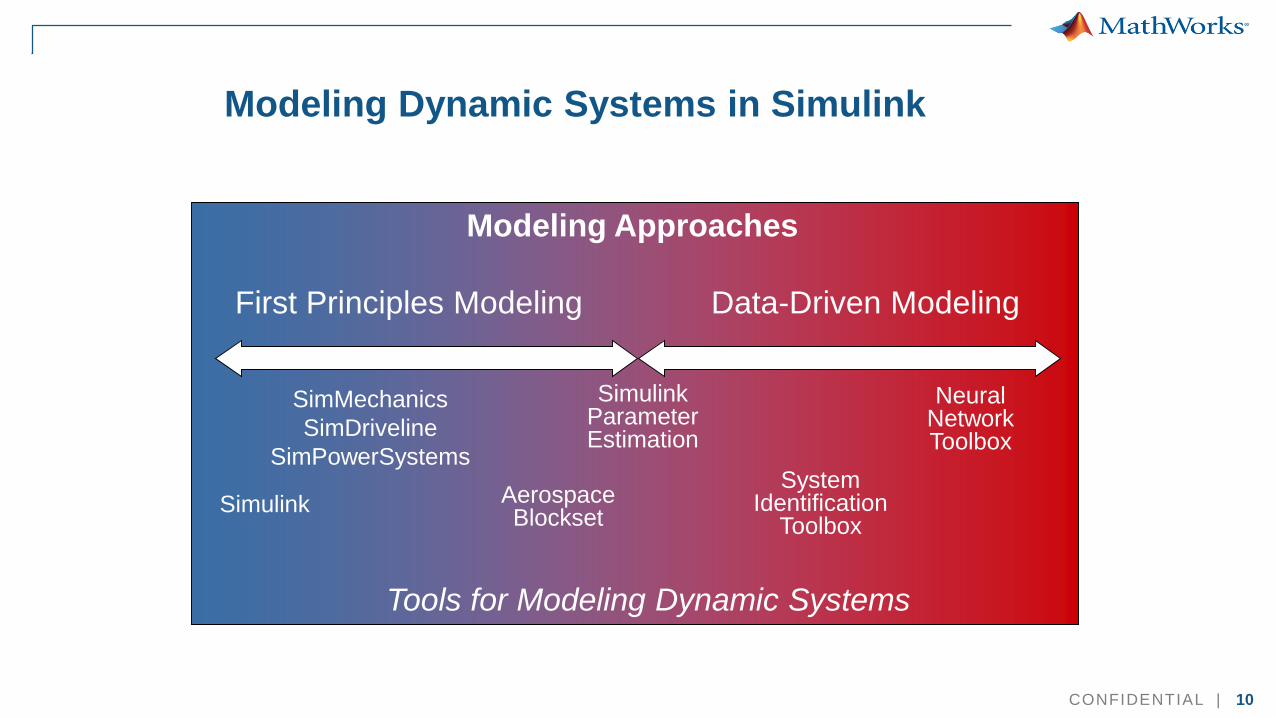
Data-Driven ModelingFirst Principles Modeling
Neural NetworkToolbox
SimMechanics
SimDriveline
SimPowerSystemsSystem
IdentificationToolbox
Aerospace Blockset
SimulinkParameterEstimation
Simulink
Tools for Modeling Dynamic Systems
Modeling Approaches
Modeling Dynamic Systems in Simulink

11CONFIDENTIAL |
Modeling the Controller
Know your plant/system -Linearization
PID
Design the controller with linear plant model
Test the controller in real time
Test controller with non-linear plant in closed-loop
Design state-logic and supervisory logic

12CONFIDENTIAL |
SimulinkRun on target hardware
With a click, your model runs on
target hardware
Supported target hardware:
– R2013a: Raspberry Pi®
– R2013a: Gumstix® Overo®
– R2012b: PandaBoard
– R2012a: Arduino®, LEGO®
MINDSTORMS® NXT and
BeagleBoard
Run Simulink models on low-cost target
hardware
new
Raspberry Pi ®
new
PandaBoard
Arduino® LEGO® MINDSTORMS® NXT
BeagleBoard
Gumstix® Overo®
new
new
13CONFIDENTIAL |
Using MATLAB and Simulink for
“Teaching/Learning Robots”
Hardware Support Package
• No need C/C++/Python
• Drivers Provided
• Comprehensive Algorithms
Build Robots with Low-Cost Hardware?
Robotics System Toolbox
• ROS/Gazebo Interface
• ROS Node Generation
• Comprehensive Algorithms
Use Powerful Robots Running ROS?
Visit:
www.mathworks.com/hardware
Visit:
www.mathworks.com/products/robotics

14CONFIDENTIAL |
Key Features of Robotics System Toolbox (v1.0)
• MATLAB-ROS Interface
• Simulink-ROS Interface
• Robotics Algorithms
• Comprehensive Demos

15CONFIDENTIAL |
Demo 1 Overview: Design and Test Robotics Algorithms
Prototype
algorithms
(e.g., Path Planning)
in MATLAB
Test algorithms
with ROS-enabled
Simulators such
as Gazebo
Test algorithms on
a Robot
and
analyze the
performance with
rosbag

16CONFIDENTIAL |
Demo 1: Design and Test Robotics Algorithms
• Prototype a path-planning algorithm in MATLAB

17CONFIDENTIAL |
Demo 1: Design and Test Robotics Algorithms
• Test it with Gazebo through MATLAB-ROS Interface

18CONFIDENTIAL |
Demo 1: Design and Test Robotics Algorithms
• Test it with a physical robot running ROS

19CONFIDENTIAL |
Key Capabilities Demonstrated
MATLAB-ROS Interface
– Create a ROS node inside MATLAB
– Design and test robotics algorithms on a robot
simulator such as Gazebo
– Test robotics algorithms on a physical robot
– Import rosbag log files into MATLAB
Simulink-ROS Interface
– Simulink I/O with ROS networks
– ROS node generation from Simulink models
Algorithms in Robotics System Toolbox

20CONFIDENTIAL |
Robotics Algorithms with Other MathWorks Products
Computer Vision System Toolbox Phased Array System Toolbox

21CONFIDENTIAL |
Thank You…
Top Related