
![GMR Voting System Catalog Part1 ... - download.gongkong.comdownload.gongkong.com/file/company/10490/GMRVotingSystemCatalog.pdf · c?Ô 1 1. veÄ • gmr 2Ï4³ veÄ 3 • gmr ]](https://static.fdocuments.us/doc/165x107/5bfc0ea409d3f225088bc5a1/gmr-voting-system-catalog-part1-co-1-1-veae-gmr-2i4-veae-3-.jpg)

![Ë ô Á r a P c ó Þ ì À ô r a ý! ¨ êhomepage.ntu.edu.tw/~anthro/download/journal/69-5.pdf · £ r ó ] A D ü m ñ * ¨ ^ ý ¶ ¥ ¨ ^ L : À ô Y w r L À ô ¿ p ¶ r](https://static.fdocuments.us/doc/165x107/607f5b09d3d68802c76eff05/-r-a-p-c-r-a-anthrodownloadjournal69-5pdf.jpg)



Languages
Pages
Legal


DCS 500 JÌus[¬< Èô|ϳ 25 Ç 5150 A
C检 DCS 500B
MTG
Speedcontroller
Current Control Firing unit
DC-MOTOR
Speed ActualScaling
Current actualforming
Rampgenerator
EMFcalc.
AC supply
Up
Down
Constantsources
Speedrefernce
Torque reference
Alpha ref.
Current limitation
Torquereferenceselector
Loc/Rem
Speed referencevia panel bus
add. Speedreference

2002 ë ABB èô|ϳÝ$@Ì. ±-ÝGý.
Èô|25Ç5150 A
C检
CÊ21.233
·Õ: 3ADW 000 078 R0301 Rev C
SWDB_E_C.DOC
ó: Aug. 1st, 2001 ·Ó: Rev B Dec. 2nd, 1998

Â)
DCS 500 C检 i
• VÄ....................................................................................................................................... 1 CÊVÄ ......................................................................................................................... 2 DB .................................................................................................................... 2 ßc,| .................................................................................................................... 2 ¬<XCÊ ...................................................................................................... 3 )XCÊ................................................................................................... 3
sÑ+............................................................................................................................. 3 D+âõ³ I/O................................................................................................................ 4 D+g9 .................................................................................................................... 4 D+gÎ .................................................................................................................... 5 õ³g9 .................................................................................................................... 5 õ³gÎ .................................................................................................................... 9
• BâשsÑ ....................................................................................................................11 B(SETTINGS)sÑ+ ................................................................................................11 |×V(MANUAL TUNING)sÑ+..............................................................................12 ¾|×V ...................................................................................................................12
• ô|e ..............................................................................................................................16 ô|e(DRIVE LOGIC)sÑ+ ....................................................................................16 yº<XÁÜ .....................................................................................................16 yº<XÚ .....................................................................................................17 ¤ ...................................................................................................................17 06 ...................................................................................................................18 pá! ...................................................................................................................20
D 1`D 2ÈXÛ6 ...........................................................................................20 /°ß .......................................................................................................................21
• óz¡\âózn.............................................................................................................23 CÊXóz6k .....................................................................................................23
óz£(SPEED_MEASURMENT)sÑ+ ....................................................................23 ݽóz£ã .....................................................................................................23 r£êÕ< ................................................................................................................24 õ³ó¥ .........................................................................................................24 Uû...........................................................................................................................24 r_X6k .........................................................................................................24 hü_ ...................................................................................................................24 Îb EMFXróz................................................................................................24 B EMFukXóz................................................................................................25 rózX¸¶ .........................................................................................................25
&nn(CONST_REF)sÑ+......................................................................................25 CÊ|!<(SOFTPOT)sÑ+................................................................................25 nXrtâ£å .....................................................................................................26 $...........................................................................................................................26
nݽ(REF_SEL)sÑ+ ...........................................................................................26 ózåX ¬ .........................................................................................................26
Â)
ii DCS 500 C检
ÃÚ¥ó<(RAMP GENERATOR)sÑ+ ......................................................................26 / °ßózn ..................................................................................................27 nX±Õ ................................................................................................................27 ù0ÊXÃÚsÑ .....................................................................................................27 ÃÚsÑXݽ.........................................................................................................27 nX$ ................................................................................................................27 ÃÚsÑXÃ.........................................................................................................27 gγcróz .....................................................................................................27 gÎá! ...................................................................................................................27 tó9S ...................................................................................................................27
• óz ..............................................................................................................................29 n` 2(REFSUM_2)sÑ+.........................................................................................29 ózÃÂ(SPEED_ERROR)sÑ+ ................................................................................29 óz© ............................................................................................................29 ø¶< ................................................................................................................29 k·sÚ ............................................................................................................30 k·hü_ .....................................................................................................30 k· ............................................................................................................30 nk·ûã ............................................................................................................30 gβy ................................................................................................................30
óz(SPEED_CONTROL)sÑ+............................................................................31 râÃÚÊÈXB ..............................................................................................31 ¨_rXD£.........................................................................................................31 gÎ$ ...................................................................................................................31 ¬ãÊÃÚ¼ÚXB ................................................................................31 óz!XsÚ.........................................................................................................32 ó!X×V ................................................................................................................32
óz¥(SPEED_MONITOR)sÑ+ ............................................................................33 róz¨W<.........................................................................................................33 Yó$ ...................................................................................................................33 óz£p ............................................................................................................33 @±x ...................................................................................................................34
• @½n ..............................................................................................................................36 @½nݽ(TORQ_REF_SELECTION)sÑ+...........................................................36 @½nX6k.........................................................................................................36 ¢hüXóQÚ! ..............................................................................................36 gÎ$ ...................................................................................................................36
@½/$(TORQUE/CURRENT_LIMITATION)sÑ+............................................36 $ ...................................................................................................................36 @½$ ...................................................................................................................37 âózÝGX$ ..............................................................................................37 Sm9S ...................................................................................................................38
• ..............................................................................................................................41 @½nØÚ(TORQ_REF_HANDLING)sÑ+ ............................................................41

Â)
DCS 500 C检 iii
@½nݽ ............................................................................................................41 @½ ...................................................................................................................41 gÎ$Û .........................................................................................................41
(CURRENT_CONTROL)sÑ+.......................................................................42 @½ / nݽ ..................................................................................................42 ¡h© ............................................................................................................42 ÕÕ×V< ................................................................................................................42 v6k ............................................................................................................42 nXÞÊÈ..................................................................................................42 n$ ............................................................................................................42 ÃÂy: ............................................................................................................42 PI ×V<...................................................................................................................42 ¨_r KP X6k ..................................................................................................43 ÊÈD KI X6k ...................................................................................................43 Á ................................................................................................................43 ×V<X×V .....................................................................................................43 º¥¦X$ ............................................................................................................44 t6å©£ DXN....................................................................................................44 _...........................................................................................................................44 k...........................................................................................................................44 Áà ...................................................................................................................44 400 A óQ ................................................................................................................44 600 A óQ ................................................................................................................45 DXN ..........................................................................................................................45 º¥¦_ ................................................................................................................45 ¼ã...........................................................................................................................45 JÌu9XÕÛ..................................................................................................46
• ) ..............................................................................................................................48 ݽ) ............................................................................................................49 )XÕ .........................................................................................................49 ݽ´h( .........................................................................................................49
YB SDCS-FEX-1 ..................................................................................................49 YB SDCS-FEX-2 ..................................................................................................49 h(µË ...................................................................................................................50
êB DCF503-0050.................................................................................................50 êB DCF504-0050.................................................................................................50 î AI/DI ²y) ................................................................................................50 ݽh(µË ............................................................................................................50 õ³g9î'XSü..................................................................................................50 uk_ ...................................................................................................................51
àÊSüøþ)...................................................................................................51 B ............................................................................................................51 ÁsÑ ...................................................................................................................52 Áº¥XB .....................................................................................................52

Â)
iv DCS 500 C检
rX¸¶..................................................................................................52 ×V< .............................................................................................................52 ¡å ........................................................................................................................53 ..........................................................................................................................53 ¡åX².........................................................................................................54 å ............................................................................................................54 ¡åÊX¥ .....................................................................................................54
@½ìê ........................................................................................................................54 @½ìêXݽ.........................................................................................................55 î@½n£å .......................................................................................55 @½ìê ¬åÊX¥ ................................................................................56 / îXûê ...........................................................................................56 E` ..........................................................................................................................56 ûêß ................................................................................................................57 -6Õߣã..................................................................................................57 "OFF"ÕßtÁ ...............................................................................................57
EMF(EMF_CONTROL)sÑ+ ...............................................................................58 EMF ×V<Xüè ....................................................................................................58 ݽ EMF ..........................................................................................................59 ûóû_!.........................................................................................................59 .......................................................................................................................59 î(FLUX)n ........................................................................................................60 ù0ÊXîn .....................................................................................................60 EMF n ..................................................................................................................60 PI ×V<...................................................................................................................60 EMFø¶< .......................................................................................................61 PI rX6k ...........................................................................................................61 PI ×V<XgÎ$ .................................................................................................61
• ±x .....................................................................................................................................63 ¬<±x(CONVERTER_PROTECTION)sÑ+ ........................................................63 %_X£.........................................................................................................63 400 V o ................................................................................................................63 %ô_ ...................................................................................................................63 %_ ...................................................................................................................63 ..........................................................................................................................63 ý ..........................................................................................................................64 yp ...................................................................................................................64
1±x(MOTOR_1_PROTECTION)sÑ+ .............................................................65 2±x(MOTOR_2_PROTECTION)sÑ+ .............................................................65 £ýz ............................................................................................................65 £Ý½ ...................................................................................................................65 y:âÇÌ ............................................................................................................66 îÁÔG±x..................................................................................................67
Áõ_ ....................................................................................................................67

Â)
DCS 500 C检 v
XtQ .......................................................................................................................68 ݽÁõ_ ................................................................................................................68 y:âÇÌ ............................................................................................................69 ÁÊÈD ................................................................................................................69
• | ..............................................................................................................................73 ]<û .......................................................................................................................73
|(BRAKE_CONTROL)sÑ+ ............................................................................73 @½±Õ ...................................................................................................................73 |< ................................................................................................................73 ÔãózÛ ............................................................................................................73 |h( ...................................................................................................................73 K|ÊÊ ...................................................................................................................73 06ÊÊ ...................................................................................................................74 sÑ...........................................................................................................................76 @½ngÎ ............................................................................................................76 @½n ............................................................................................................76 £óQ¸ ...................................................................................................................76 |<ÆµË .....................................................................................................76 |<K|µË..................................................................................................76
• =)Xg9 / gÎ .................................................................................................................78 • îX ²y......................................................................................................80 • 12 ݶX!B ......................................................................................................................82 • DB)< ...........................................................................................................................84
DB)<(DATA LOGGER)sÑ+ ..............................................................................84 • ü_Ê ..............................................................................................................................87 • p ..............................................................................................................................89
pØÚ(FAULT HANDLING)sÑ+.............................................................................89 pây:µË .........................................................................................................89 p+ .......................................................................................................................89 y:+ .......................................................................................................................89
p)< ....................................................................................................................89 D(CONSTANTS)sÑ+ ............................................................................................90 eD ...................................................................................................................90 D:D ...................................................................................................................90
¾µË(FREE_SIGNALS)sÑ+ ................................................................................90
) A éîâD<....................................................................................................................... A1


CÊsÑ£Ä
DCS 500 C检 1
• VÄ DCS 500B Ȭ<YXØÚ<S SDCS-CON-2Äà DCS
500 ¬<Yí SDCS-CON-1 SÄ DCS 500B ÝÔþ MODBUS î²yÈ ABBô|¬²yXîü#Ä DCS 500B ùîD+/õ³g9ê CDP 312 ¬¯ Ä DCS 500B CÊÙÀÛhüßcsÑ+=)sÑ+Ä =)sÑ +îêß²yâùäÈîXhüßcÄ ÛßcSüIÈÖhûîDÎô|sÑXÔUÄ DCS 500B L_XhüÝÖ • KÆ • ¢Ï³ • !B • ¥¾Ú: • 4 • ¤
MTG
Speedcontroller
Current Control Firing unit
DC-MOTOR
Speed ActualScaling
Current actualforming
Rampgenerator
EMFcalc.
AC supply
Up
Down
Constantsources
Speedrefernce
Torque reference
Alpha ref.
Current limitation
Torquereferenceselector
Loc/Rem
Speed referencevia panel bus
add. Speedreference
Ò 1 DCS 500B v

CÊsÑ£Ä
2 DCS 500 C检
CÊÐÄ
DB VpÔÄô|Ýø¡áàXhüÈùüCÊYBøDÄ _VÖ îÔþD+g9µËÄùݽøáàXDÄ D1Íh 1ÈàD 2Íh 2Ä îÔþD+gεËê¼Ý½ 1ê 2X@ÊÄ
M1
DCS 500 Converter
AC supply
M MM
PA RA M ETERSET 1 fo r APP LICA TIO N 1
M 2 M1M 2
M
I/O board
PA R AM ETERSET 2 for A PPLICA TION 2
Fie
ld M
1
(Fie
ld M
2)
Fie
ld M
1
(Fie
ld M
2)
[M O T O R 2]
R D Y R UN N IN G
R D Y O N
9 1 3
M O TO R AC T
10913
SO F T W AR ED rive Log ic
D I D O
A p p lica tion 2se lec tedA p p lica tion s e lec tion
0 = A p p l. 11 = A p p l. 2
Ò 2 ÔÄô|ÈÍhø¡áàXhü
ßc,| ¬<XϳCÊ,|ü,|< (D33).¬<`)XD
,|ü,|<(D35)Ä oÃ]üS SCDS-CON-2ÞÄ

CÊsÑ£Ä
DCS 500 C检 3
DX±,îD BACKUP STORE MODE (11202)ݽÄm`êÏ`DâȹD6á 0 [NONE]Ä
BACKUPSTORE MODE(ÛÑõã): 0 = [NONE] ´ÛÑ 1 = [SAVE MOT1 SET] ±, 1B FPROM ,|<Ä 2 = [SAVE MOT2 SET] ±, 2B FPROM ,|<Ä 3 = [FACTORY SET VALUE] 6áÕ RAM ,|<. 4 = [SELECT MOT1 SET] ¢ FPROM Ï 1XBÄ 5 = [SELECT MOT2 SET] ¢ FPROM Ï 2XBÄ
¬<CÊ Ýø¡©ßCÊÖ - Dü,|< D33XÛRÞÄ - µË CNT SW VERSION (11218) ÛÎZ¬<CÊÄ
DC21.226
DCS500
VERSION(226 = 1. version SDCS-CON-2)(227 = 2. version)
Ò 3 ,|< D33 ÞXÛR
)XCÊ
VpSüZ ) SDCS-FEX-2 ê DCF 503/4 (SDCS-FEX-3x) Ýø¡©ÿJCÊÖ - ËDü) SDCS-FEX-2 ê DCF 503/4 XØÚ<X ÛRÞÄ - µË FEXC1 SW VERSION (11220) ÛÎZCÊÄ Vpô|SüZøþ),`þXCʵË
FEXC2 SW VERSION (11221) ÎÄ )Ìo)XÝDÑ,ü FPROM ,|< (D35) Ä
sÑ+ DCS 500B Xßc<¼sÑ+äÄ ¹ßcùî CDP312 ¬ê PC ¹K CMT/DCS500B ¯ Â Ä ßcX£ÔþsÑ+§XÑâÒ 4OĬ<¬ÝtsÑ+È3ùâ`XsÑ+àSüĺµC APPLICATION BLOCKS (hüsÑ+) `.
¹SüZtsÑ+È ¬<Þht¹ÛÄ
CÊsÑ£Ä
4 DCS 500 C检
OUT
SOFTPOT
ACT
OHL1921
11904
11905
1918[INCR]
1919[DECR]
1922OLL
1920[FOLLOW]
T20
SP
Function block input(pin number; group 19 parameter 18)
Function blockparameter
SP=Standard Program
Execution interval as ms
Function block output
Name of the Function Block
Signal name
Parameter name
Function block outputnumber
Function block output name
P1
P2
5000
-5000
Parameter value(display in "integer")
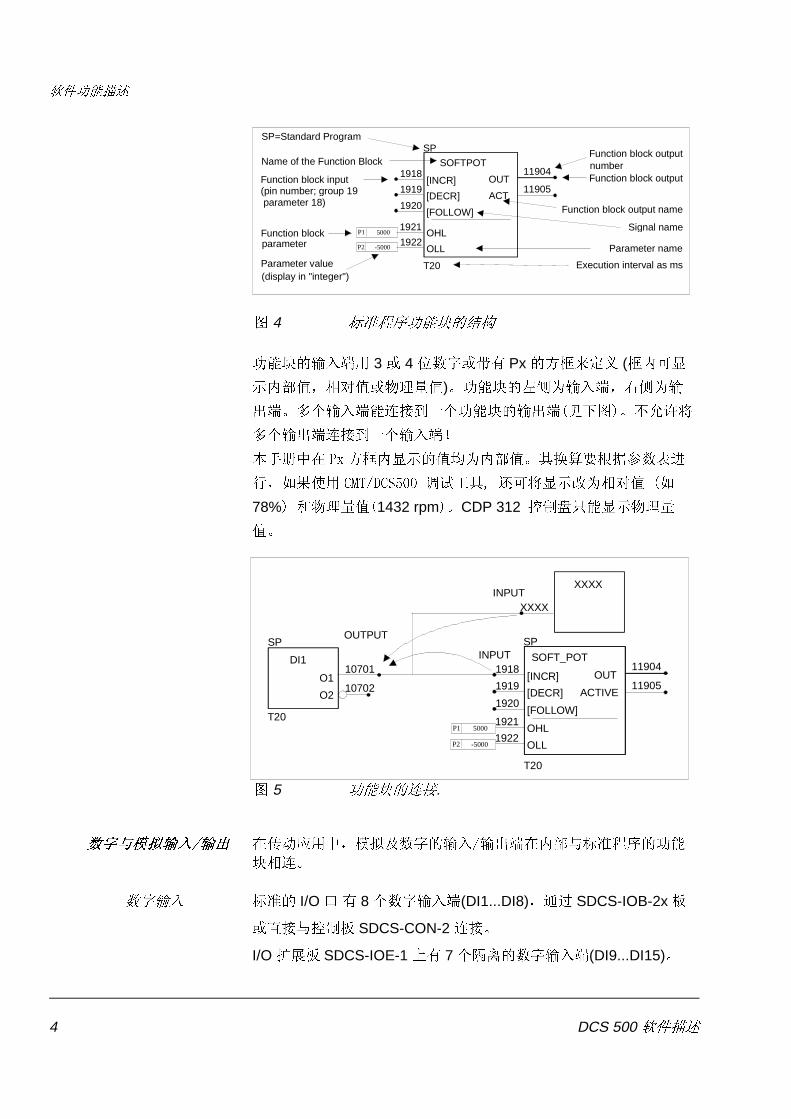
Ò 4 ÛßcsÑ+X§X
sÑ+Xg9Ãü 3 ê 4 !D+êúÝ Px X9n (YÃ
Y¼ÈÌÍê=Ú£)ÄsÑ+Xºg9ÃÈÇg
ÎÃÄîþg9ÃѲyÔþsÑ+XgÎÃßÒÄáÚ
îþgÎòyÔþg9ý
`ü 3[YXY¼ÄJ6kU BD<¯
ÈVpSü &07'&6 ש¹K ¬ÃÚ ÌÍ V
78% `=Ú£1432 rpmÄCDP 312 ¬¾Ñ=Ú£
Ä
O1
DI1
O2
10701
10702OUT
SOFT_POT
ACTIVE
OHL1921
11904
11905
1918[INCR]
1919[DECR]
1922OLL
1920[FOLLOW]
T20
T20
SP SPINPUT
OUTPUT
XXXX
XXXXINPUT
P1
P2
5000
-5000
Ò 5 sÑ+X²y.
D+âõ³g9gÎ üô|hüÈõ³D+Xg9gÎÃüY¼âÛßcXsÑ
+̲Ä
D+g9 ÛX I/O· Ý 8þD+g9Ã(DI1...DI8)Èî SDCS-IOB-2x S
êÈyâS SDCS-CON-2 ²yÄ
I/O =)S SDCS-IOE-1 ÞÝ 7þhXD+g9Ã(DI9...DI15)Ä

CÊsÑ£Ä
DCS 500 C检 5
O 1D I4
O 2
10707
10708
T20
SP
O 1D I9
O 2
10717
10718
T20S D C S -IO E -1
SPO utput s igna l
Inve rted O u tput s igna l
Execution time interval (ms)
Ò 6 D+g9sÑ+
D+gÎ ü SDCS-CON-2 Sê SDCS-IOB-2x SÞÝ 8þD+gÎ÷Ä
[IN ]
D O 5
[IN V_ IN ]
809
810>1
SP
T20
Inpu t S igna l (va lue = 0 con tro ls the o utput to sta te 1)
Inve rted Input S ignal (va lue 0 con tro ls the outpu t to sta te 1)
D ig ita l outpu t nam e
Ò 7 D+gÎsÑ+
õ³g9
OUT+AI2
107
OUT-
ERR
CONV MODE
HIGH VALUE
LOW VALUE
108
109
10707
10708
10709
ST5
SP
Value that corresponds to maximum input (+10V or +20mA)Value that corresponds tominimum input (-10V or -20mA)
Output value
Negated output value
Error code
Selection of the Input signal type
Function Block name
P1
P3
P2 20000
-20000
1
Ò 8 õ³g9sÑ+
õ³g9ÃÔîÝ 7þî'Ä! 5þî'ÖAITACÈAI1ÈAI2È AI3 ` AI4ü SDCS-CON-2 Sê SDCS-IOB-3 SÞÄâ 2þî'È AI5 ` AI6Èî I/O =)S SDCS-IOE-1²yÄ
õ³g9îßëD¯ 6kÖ HIGH VALUE (1XX) = OUT+ (XXXXX) XÈÍhÔ¬g9 (î +10V ê +20 mA)Ä â LOW VALUE (1XX) = OUT+ (XXXXX) XÈÍhÔ"g9 (î-10V ê +20 mA)Ä OUTÖÍhg9£XgÎÈ(XXXX)ÖY¼BX#Ï£Èî×H#Ï£XûãÈ HIGH ` LOW VALUEáÝrtê£åÄÄP8Å

CÊsÑ£Ä
6 DCS 500 C检
¼ã. ýz£î AI2 ` AI3 (Ω ê °C)¯ Y¼6k. ü¡ßÈD HIGH VALUE â LOW VALUE uÝãZ.
g9µËO_ݽ g9µËO_D CONV MODE (1XX)n. ß< DCS500B CÊõ³g9µËXÝ.
õ³g9 AIx CONV MODE-Dݽ ²ySB:
AITAC 1 = -10...+10V -20...+20mA
IOB-3: ---- IOB-3: S1:1-2 ²y
2 = 4...20mA, )Uû IOB-3: S1:1-2 ²y
3 = ó¥_ - 10V...+10V
CON-2: 3:1-4: 90-270V X3:2-4: 30-90V X3:3-4: 0-30V
AI1 1 = -10...+10V -20...+20mA
CON-2; IOB-3: ---- CON-2: 500Ω ²y X3:5-6 IOB-3: S1:3-4 ²y
2 = 4...20mA, )Uû CON-2: 500Ω ²y X3:5-6 IOB-3: S1:3-4 ²y
õ³g9 AIx CONV MODE-Dݽ ²ySB:
AI2 1 = -10...+10V -20...+20mA
CON-2; IOB-3: ---- CON-2: 500Ω ²y X3:7-8 IOB-3: S1:5-6 ²y
2 = 4...20mA, )Uû
CON-2: 500Ω ²y X3:7-8 IOB-3: S1:5-6 ²y
3 = ýz£ 1 x PT100; gΣ: °C
IOB-3: S5:3-4 (5 mA), r=10
4 = 2 x PT100; gΣ: °C IOB-3: S5:3-4 (5 mA), r =1
5 = 3 x PT100; gΣ: °C IOB-3: S5:3-4 (5 mA), r =1
6 = PTC; gΣ: ohm (Ω) IOB-3: S5:1-2 (1.5 mA), r =1
7 = PTC; gΣ: ohm (Ω) CON-2: S1:23-24 (+10V _d)
AI3 1 = -10...+10V -20...+20mA
CON-2; IOB-3: ---- CON-2: 500Ω ²y X3:9-10 IOB-3: S1:7-8 ²y
2 = 4...20mA, )Uû CON-2: 500Ω ²y X3:9-10 IOB-3: S1:7-8 ²y
3 = ýz£ 1 x PT100; gΣ: °C
IOB-3: S5:3-4 (5 mA), r=10
4 = 2 x PT100; gΣ: °C IOB-3: S5:3-4 (5 mA), r=1
5 = 3 x PT100; gΣ: °C IOB-3: S5:3-4 (5 mA), r =1
6 = PTC; gΣ: ohm (Ω) IOB-3: S5:1-2 (1.5 mA), r=1

CÊsÑ£Ä
DCS 500 C检 7
AI4 1 = -10...+10V -20...+20mA
CON-2: ---- IOB-3: S1:11-12 þ²y S1:13-14 þ²y CON-2: 500Ω ²y X4:1-2 IOB-3: S1: 9-10 ²y S1:11-12 þ²y S1:13-14 þ²y
2 = 4...20mA, )Uû
CON-2: 500Ω ²y X4:1-2 IOB-3: S1: 9-10 ²y S1:11-12 þ²y S1:13-14 þ²y
3 = Earth fault current measurement gΣ: A
IOB-3: S1:11-12 ²y 13-14 ²y 9-10 þ²y ²yÃ$: X3:11-12
AI5 on 1 = -10...+10V -20...+20mA
´ÔB S1:3-4 ²y
SDCS-IOE-1 2 = 4...20mA, )Uû S1:3-4 ²y
AI6 on 1 = -10...+10V -20...+20mA
no action S2:3-4 ²y
SDCS-IOE-1 2 = 4...20mA, )Uû S2:3-4 ²y

CÊsÑ£Ä
8 DCS 500 C检
õ³g9íÃ·Õ Vp@Ê`CÊX6káPÈÃî ERR éîßõ³g9íÃ
·ÕÄ í÷ÕVßÖ
íÃ
·Õ Y
£Ä
0 NO FAULT ´pê CONV MODE = 0 1 I < 4 mA CONV MODE = 2 àè I < 4 mA 2 NO IOB-1/IOB-3 þ²y IOB-1 ê IOB-3 S 3 WRONG IOB: AITAC ¾²yZ IOB-2 S,
CONV MODE = 1 ê 2 è IOB-3 þ²y CONV MODE = 3 è IOB-1 þ²y
AI1 ¾²yZ IOB-2 S AI2 ¾²yZ IOB-2 S
CONV MODE = 3,4,5,6 è IOB-3 þ²y CONV MODE = 7 è IOB-1 þ²y
AI3 ¾²yZ IOB-2 S CONV MODE = 3,4,5,6 è IOB-3 þ²y
AI4 ¾²yZ IOB-2 S CONV MODE = 3 è IOB-1 þ²y
4 LOW VAL.>HIGH VAL. " > ¬ 5 NO IOE 1 þ²y=)S
_: ¹ná+/-10VÈÔ¡6k
õ³g9 AI1²yXózn×È 0 ... +/- 8V : - 0V = ÍhÊó - +/- 8V ÍhÔûóz CÊÈâózÌGXY¼ 20000 ÍhÔûózÄü ¬Þê CMT/500¹KùSü¹ rpm)!XÄîD SPEED_SCALING (2103) ùÍózXY¼¯ 8_nÄ ÝÞ_5ÊÈDBÖ
CONV MODE (104) = 1 (_µË) HIGH VALUE (105) = 25000 (ß6Èâ) LOW VALUE (106) = -25000 (ß6Èâ) 'n+4VÊÈ AI1sÑ+gÎÃ(10104) Xózn 10000Ä
îÖ
20000.max
1010 •=
reference
VxP
- ¬úË! - ¹nûb 10VȬ<´©ÍJ¡6kÖOü¬< ê¯ 6k - b6kDXÞ$Èãb 6,25V Xn3´©¡6k

CÊsÑ£Ä
DCS 500 C检 9
õ³gÎ õ³gÎEÝ 3þî'Ķùî SDCS-CON-2 S3ùî
SDCS-IOB-3 S²yÄ!øþgÎ(AO1 ` AO2) ùêßÈgÎ×È +10V...-10VÄ 3þgÎ@ÊÃXvr£Äº`TDBÄ
AO1
NOMINAL V202
OFFSET V203
NOMINAL VAL204
[IN]201
SP
ST5
Input signal
Maximum output voltage (V)
Minimum output voltage (V)
Maximum value
P1
P3
P2
10000
0
20000
Ò 9 õ³gÎsÑ+
_Ö
¹ AO 1²yróz SPEED ACT (12102) µËÈíWXDB VßÖ AO1 [IN] (201) = 12102 AO1 NOMINAL V (202) = 10 AO1 OFFSET V (203) = 0 AO1 NOMINAL VAL (204) = 20 000 îÞÄBÈróz 20000 Íh +10V gÎ_Ä
U = out
[IN]
NOMINAL VALNOMINAL V + OFFSET V

CÊsÑ£Ä
10 DCS 500 C检
BT
W.P
OT
1/2
MA
CR
O S
EL
EC
T
AC
TU
AL
VA
LUE
3
AC
TU
AL
VA
LUE
2
AC
TU
AL
VA
LUE
1
FIE
LD
BU
S N
OD
E A
DD
R
tP
ER
IOD
DR
IVE
MO
DE
P1
MA
INTE
NA
NC
E
112
20 F
EX
C1
SW
VE
RS
ION
112
21 F
EX
C2
SW
VE
RS
ION
1121
5F
EX
C2
CO
M E
RR
OR
S
FE
XC
2 C
OM
ST
AT
US
1121
4
1121
3F
EX
C2
CO
DE
1121
2
1121
1
FE
XC
1 C
OM
ER
RO
RS
FE
XC
1 C
OM
ST
AT
US
FE
XC
1 C
OD
E11
210
FE
XC
ST
AT
US
1120
3
1121
7
1121
6C
MT
CO
M E
RR
OR
S
CD
I300
BA
D C
HA
R
1120
5B
C
112
19 C
NT
BO
OT
SW
VE
R
112
18 C
NT
SW
VE
RS
ION
112
22 P
RO
GR
AM
LO
AD
112
02 B
AC
KU
PS
TO
RE
MO
DE
112
01 C
OM
MIS
ST
AT
1120
4T
C S
TA
TU
S
1120
6S
QU
AR
E W
AV
E
CD
P3
12
1212
1211
1210
P11P9
P8
P7
P6
P5
P4
P3
P2
P10
T5SE
LEC
T O
PE
R.S
YS
T
WR
ITE
EN
AB
LE P
IN
WR
ITE
EN
AB
LE K
EY
CM
T D
CS
500
AD
DR
DR
IVE
ID
(112
07)
TE
ST
RE
F
04 7 8 9 1
0
0 1 2 3 4E
MF
CO
NT
RO
LL
ER
SP
EE
D L
OO
P
SE
CO
ND
FIE
LD
EX
CIT
ER
FIR
ST
FIE
LD E
XC
ITE
R
AR
M.
CO
NT
RO
LLE
R
RE
LE
AS
E O
F A
RM
.C
ON
TR
OL
LIN
G&
4I1
=I2
PO
T2
VA
LUE
PO
T1
VA
LUE
TE
ST
RE
F S
EL
(112
09)
(112
08)
(109
06)
TE
ST
RE
LEA
SE
LO
CA
L
SP
-100
MA
NT
UN
_3
1201
1204
1205
1206
1202
1203
1207
1208
1209
1213
1214
0
1000 0
100
250 1
358
358 0 1 0
OV
P S
EL
EC
T
RE
F D
CF
RU
N D
CF
RE
SE
T D
CF
DI/O
VP
F 2
1A
121
DC
F F
IELD
MO
DE
as
FE
X 2
(R
ece
iver
)
as
FE
X 1
(R
ece
iver
)
65
42
65
42
1
5
4
Fe
xlin
k as
Tra
nsm
itter
for
FE
X1
an
d F
EX
2
6
Inpu
t fo
r ex
tern
al O
verv
oltg
.Pro
tect
ion
Cur
.Con
tro
ller
for
hig
h in
duct
ive
load
1216
P2
BC
0 1
6
54
3
21
fro
m e
xt. F
EX
LIN
K
x8A
RM
_C
UR
R_P
I_K
P..
.
x8A
RM
_C
UR
R_P
I_K
I..
.4
08
407
AR
M_
CO
NT
_C
UR
_L
IM
360
1R
EV
_D
EL
AY
409
15
360
2R
EV
_G
AP
15
360
3F
RE
V_D
EL
AY
150
DC
F C
urre
nt C
ontro
l
Sta
nd A
lone
Fex
link
Nod
e 1
Fex
link
Nod
e 2
MG
Set
Dis
able
d
Res
erve
d
: : : : : ::
0
1130
3
1091
6
1091
7
SP
P1
DC
F M
OD
E :
-105
DC
FM
OD
1215
1217
0 0
Con
trol
Ad
just
.
1050
7
1051
4
1051
3
1051
2
1051
1
1050
9
1051
0
BR
IDG
E T
EM
P
QU
AD
R T
YP
E
CO
NV
TY
PE
MA
X B
R T
EM
P
Con
v. v
alu
esC
onv.
se
tting
s C
4
SE
T Q
UA
DR
TY
PE
SE
T C
ON
V T
YP
E
SE
T M
AX
BR
TE
MP
SE
T U
CO
NV
V
SE
T I
CO
MV
A
U C
ON
V V
I C
ON
V A
I T
RIP
A
SE
TT
ING
SS
P
P5
P4
P3
P1
P2
Mot
or D
ata
I M
OT
N A
U M
OT
N V
I M
OT
1 F
IEL
DN
A
I M
OT
2 F
IEL
DN
A
FE
XC
SE
LP
11
P10P
9
P8
P7
1050
8
1051
5
U N
ET
DC
NO
M V
U S
UP
PL
YP
13
PH
AS
E S
EQ
CW
P14
1050
4U
NE
T A
CT
LIN
E F
RE
QU
EN
CY
Sup
ply
Dat
a
ST2
0
LA
NG
UA
GE
P15
(onl
y fo
r C
ur.
Co
ntro
lling
)U
NI
FIL
T T
CP
19P6
P18
P12
P16
P17
CU
RR
AC
T F
ILT
TC
PLL
CO
NT
RO
L
PLL
DE
V L
IM
CO
NV
CU
R A
CT
AR
M C
UR
AC
T
TO
RQ
UE
AC
T
1050
1
1050
2
1050
3
U A
RM
AC
T
EM
F A
CT
CA
LC
Iact+ -
OF
FS
ET
UD
C
UD
C10
505
1050
6
EM
F F
ILT
TC
-1S
ET
TG
S_3
517
518
519
520
521
513
501
502
503
504
505
523
507
506
522
524
528
526
525
0 0 0 0 0 10500 10 30 30 0 0
500 2 04
1024 0 10
AO
2 N
OM
INA
L V
ALU
E
AO
2 O
FF
SE
T V
AO
2 N
OM
INA
L V
205
INSP
AO
2
ST5
P2
P3
P1
-80
206
207
208
5000 0
4095
U_N
ET
_AC
T
14
SP
_AC
T_
FIL
T
4
CO
NV
_C
UR
_A
CT
14
CO
NV
_C
UR
_A
CT
14
U_A
RM
_A
CT
14
U_A
RM
_A
CT
14
DI2
3
BC
3,
4,1
3
LO
CA
L
3

CÊsÑ£Ä
DCS 500 C检 11
• BâשsÑ
SETTINGS sÑ+ ¹sÑ+üb6kÝ¡UXµËÄÄ P10ÒÅWÚä 5þ¼ÚÄ ¹ C4§XX¬<,í¾ÝD 517 Ç 521 ÄȺXµCÈ¡0ÛÐ`Ä
D EMF_FILT_TC (513) übÍukÎX EMF ¯ ¸¶ÈSJ¶6G¥Ä
ZÚD`Y¼µË¹=Ú£X6ãÎ9ÄÔUBÔoÎ
DÖ U_MOTN_V (501) qnv_ I_MOTN_A (502) qnv I_MOT1_FIELDN_A (503) ) 1Xqn I_MOT2_FIELDN_A (504) ) 2(VpÝ)Xqn FEX_SEL (505) )Xݽ
ÝoÃü0XµËÄƣݬx²yZÄ_VÖv_µËÆ
£²yÇõ³gÎ 2ÄáàXµË,üáàX6kGÏÄ U_ARM_ACT (10505) rgÎÈ_ 6k: 100% = 4095 Íh 1.35 * P507 (V) TORQUE_ACT (10503) Bv`îµËukÎX r@½ 6k: 100% = 4000Íhqn@½ (¹ P502 B qnè P503/504 qn) CONV_CUR_ACT (10501) rgÎÈ 6k: 100% = 4095Íh¬<qn(A) ARM_CUR_ACT (10502) rgÎÈ 6k: 100% = 4095Íhqn(A), (¹ P502
qn) CURR_ACT_FILT_TC (523) übG¥rµË 10501 `
10502
ÍÔU¯ ÔoÎX6kÈàÍ%3U¯ ÔoUX6
kÄ PHASE_SEQ_CW (506) ¬Ìc U_SUPPLY (507) qno_
¬XÁÔ¡OÈÃî¹ßDݽ LANGUAGE (522) ݽ CDP 312 XÁÔ¡O º`¡0ÛÐXÌG´VÄ

CÊsÑ£Ä
12 DCS 500 C检
MANUAL TUNING |ìêsÑ+
DCS 500B X×V<ù¯ |ê¾|ìêÄJv`×V<8Kݾ|ìêsÑêȬù0|ìêÄàózÈEMF×V<¾Ñ¯ |ìêÄø¡ãÑîÔþD9r.
ݽìê î¬êê¼D+ I/Oݽ(LOCAL)ãâÈï |ìêÄ î DRIVEMODE (1201)DÄô|õãÅݽßë 5MXÏÔþÈÃ0|ìêÄ 4 = v×V< 7 = 1þ) 8 = 2þ) 9 = óz (nÒ`óz×V<) 10 = EMF ×V<
ݽâÈ×V<êózîXnî|ìêXnÓ6
( P10)Ä_VózXózn(LOCAL SPEED REF) |ìênÓ6Ä|ìênãÝ 4¡Ö POT1 VALUE (1204) ×ÈÖ-32 768...32 767 POT2 VALUE (1205) ×ÈÖ-32 768...32 767 SQUAREWAVE (11206) ĶnãÅ ¶¥ó<XD POT1 ` POT2 VALUE B,ÊÈÈh PERIOD btw.POT1/2 (1206) B( P10)
TEST REF (11207) ×È: 0...65 535 îµË TEST REF SEL ¯ ݽÄ( P10)
0 = [ZERO] nÊ 1 = [POT1] ݽ POT1 VALUE (1204)0n 2 = [POT2] ݽ POT2 VALUE (1205)0n 3 = [SQRW] ݽ SQUAREWAVE (11206)0n 4 = [TEST] TEST REF (11207)ݽ 11207X0n ü|ìêßÈ3ùü CMT/DCS500 êõ³gÎã Ío¯ £Ä
Íb¶nã9ÈÈnW·<XózX×ÈOü7X
n×ÈYÄ
¾|ìê `ÉOPERATING INSTRUCTION/¡0ÛÐÊ

CÊsÑ£Ä
DCS 500 C检 13
¹SüZ DRIVEMODE sÑÈÕ·Õî COMMIS STAT (11201) µËÛ: 0 = NOT ACTIVATED ÝsÑÆäsr
Sü SDCS-CON1 SÊÃÑÎXµC: 1 = RUN COMMAND ? ·Õ 53 2 = FEXC SEL ? )(FEX)ݽíà 3 = FEXC RDY OPER ) FEX1 / 2 ê DCF 503/4 þ
ÛQ¤ 4 = FEXC OK=0 )þÛQ; ¬<Xí
õC 5 = FIELD ON=0 FEX1 / 2 ê DCF 503/4 þÜÌ 6 = IF NOT IN 95-105% áü 95% ..... 105% ×ÈY 7 = NOT OK AFTER 20s 20s Yô|@Ê¡þÛQ 8...48 = ±-
'Sü SDCS-CON2 Sè DRIVE _MODE = 3 [ARM. AUTOTUNING] v×V<¾|ìêÊÃÑÎXµC: 49 = IF AT START ? ¾ìêÔâ 10sY¬þ n 50 = OHMIC LOAD ûóQþBn 51 = IACT FEEDBACK £vÊX¡\ãbn.
$ãb²Á$êãb
20%. 52 = CURRENT CURVE ÆáQ.¿h»S,JÌuþº ¥ê´óQ. 53 = RUN COMMAND? K|5ÊíÃ.Ô¾ìêÊô|7ü ¤ êÔ¾ìê 20 s YþΤ Q¸. 54 = TOO HIGH SPEED ¾ìêßózþû.ózûb 1% ê
EMF ûb 15%. 55 = INDUCTANC ó´©£.¿h»S,JÌuþº ¥ê´óQ. 56 = CONT CURR LIM ²ÁX$´©Bn. 57 = FIELD REMOVAL \Y 10 s. 58 = STOP COMMAND ÕÕ×V<êü¾ìêÊÎ06 Q¸.

CÊsÑ£Ä
14 DCS 500 C检
'Sü SDCS-CON2 Sè DRIVE _MODE = 5 [FEX2/3 AUTOTUN] ×V<¾ìêßÃÑÎXµCÈ) FEX2 ê DCF 503/4 : 60 = CANNOT AUTOTUNE î8sÑ´©B×V< 61 = ILL START COND ¾ìêX2©K|5Ê

CÊsÑ£Ä
DCS 500 C检 15
CO
MFL
T. T
IME
OU
T
CO
MM
FA
ULT
DY
N B
RA
KE O
N
TRIP
DC
BR
EA
KER
MO
TOR
AC
T
MA
IN C
ON
T O
N
FIE
LD O
N
FAN
ON
CO
MFA
ULT
MO
DE
PW
R L
OS
S M
OD
E
PA
NE
L D
ISC
MO
DE
EM
E S
TO
P M
OD
E
ST
OP
MO
DE
MA
IN C
ON
T M
OD
E
FIE
LD H
EA
T S
EL
AC
K M
AIN
CO
NT
AC
K M
OT
OR
FA
N
AC
K C
ON
V F
AN
DIS
ABL
E L
OC
AL
ST
AR
T IN
HIB
IT
EM
EST
OP
AC
T
RD
Y R
UN
NIN
G
RD
Y O
N
MIN
SP
EE
D
EM
E S
TO
P
CO
AST
STO
P
DR
IVE
LO
GIC
AU
TO
-RE
CLO
SIN
G10
914
1091
2
1090
1
1090
2
1090
3
1090
4
1090
5
1090
7
1090
6
1090
8
1090
9
1091
0
1091
3
1091
1
1091
5
913
912
911
910
909
908
907
905
904
903
902
901
P5
P4
P3
P2
P1
P6
P7
P8
906
LOC
AL
SP
ALA
RM
FAU
LT
RU
NN
ING
1
RU
N3
RU
N2
RU
N1
ON
/OFF
MO
TOR
2
RE
SE
T
LOC
AL
(122
01)
(112
05)
BC
(B
LOC
K.)
T2
0
-36
DR
LOG
I_2
914
915
916
917
918
919
920
921
0 1 0 0 0 0 0 2
DO
4
INV
IN
IN80
7
808
T2
0
SP
-46 D
O8
INV
IN
IN81
5
816
T2
0
SP
-42 D
O7
INV
IN
IN81
3
814
T2
0
SP
-43D
O6
INV
IN
IN81
1
812
T2
0
SP
-44D
O5
INV
IN
IN80
9
810
T2
0
SP
-45 D
O3
805
INV
IN
IN
806
T2
0
SP
-47D
O2
INV
IN
IN80
3
804
T2
0
SP
-48D
O1
INV
IN
IN80
1
802
T2
0
SP
-49
O1
O2
SP
DI8
ST5
1071
5
1071
6
-62
O1
O2
SP
DI7
ST5
1071
3
1071
4
-63
O1
O2
SP
ST2
0
DI6
1071
1
1071
2
-64
O1
O2
SP
ST2
0
DI5
1070
9
1071
0
-65
O1
O2
SP
ST2
0
DI4
1070
7
1070
8
-66
O1
O2
SP
ST2
0
DI3
1070
5
1070
6
-67
O1
O2
SP
ST2
0
DI2
1070
3
1070
4
-68
O1
O2
DI1
SP
ST2
0
1070
1
1070
2
-69
RU
N_M
REF
4,1
0R
UN
_CO
NS
T_R
EF 4
RU
NN
ING
4
DI2
2
4,6
,7
BC
2
X6:
4
FR
EE
X6:
3
SD
CS
-PO
W-1
Rel
ay o
utpu
t
X96
:1-2
MA
IN C
ON
T
X7:
7
FR
EE
X7:
6
FR
EE
MA
IN C
ON
T
X7:
3
X7:
2
EX
C C
ON
T
X7:
1
FA
N C
ON
T
X7:
5
X7:
4
RU
NN
ING
RD
Y R
UN
NIN
G
MA
IN C
ON
T
X6:
2
X6:
1
MO
TOR
FA
N
CO
NV
FA
N
X6:
6
RE
SE
T
X6:
5
X6:
8
EM
ST
OP
RU
N
X6:
7
ON
/OFF
X6
of S
DC
S-C
ON
-2X
7 of
SD
CS
-CO
N-2
FAN
S_O
N 8
Mus
t be
con
nect
ed, w
hen
no f
an a
ckno
wle
dges
(DI1
, DI2
)
MIN
_SP
EE
D 9
LOC
AL
2

CÊsÑ£Ä
16 DCS 500 C检
• ô|e ô|eXÂX²ÃȲÃ`¢yº<×ô|XK
|â06¹pÊX±xÄô|e¬ÙÀÛô|ÕXgÎ
µËÄ
ô|e(DRIVE LOGIC)sÑ+
ß6ÔÍb¬<Õ§XX·ÄâW½XCĘ̂ ȹeÆ£0Z |Äü'!ÈON/OFF â RUN1/2/3 ݵËÄô|XdtâÈ`¯g9µËO 0ÕÄúíô|áîK|ÈÈg9ÔõÎ 0 1 XǬÄ
yº<XÁÜ VpgÎ RDY ON (10901) = 1 (´p FAULT), ù[ON/OFF] (901)e 1Q¸(0 1Þ)9yº<,²Ã¢yº<XÁÜ. D MAIN_CONT_MODE (915)nZyº<Xã: 0 = '[ON/OFF] (901) â ( [RUN1] (902) ê [RUN2] (903) ê [RUN3] (904) ) g9 1ÕÊÁÜ 1 = '[ON/OFF] (901) e 1ÊÁÜ
'[ON/OFF] (901) 0 1¬êÊݹßNc:
[ON/OFF] (901) 0 --> 1
FAN ON (10908)0 --> 1
[ACK CONV FAN] = 1? No
Yes
FAULT 50:
No converter fanacknowledge
Excitation contactorclosing commandFIELD ON = 1
[ACK MOTOR FAN] = 1? No
FAULT 40:
No external fanacknowledge
Yes
Yes
Field acknowledge during 6 sec. ok?
No
FAULT 39:
No fieldacknowledge
Main Contactorclosing commandMAIN CONT ON= 1
Yes
Main Contactor acknowledge = 1
No
FAULT 41:
No main contactoracknowledge
Net work phase sequence ok?
No
FAULT 38:
Phase sequence fault
Yes
Synchronization ok? No
FAULT 31:
Not in synchronism
Yes
Supply voltage ok? No
FAULT 29:Mains undervoltage orFAULT 30:Mains overvoltage
Yes
Output RDY RUNNING(10902) = 1
RDY ON (10901) = 1
NO FAULT
READY FOR RUN
Ò 10 RDY RUNNING Û¤ XNc.

CÊsÑ£Ä
DCS 500 C检 17
yº<XÔ ¹µË[ON/OFF] (901) 1¬ 0 (ß!)Èô|îÕÕ×V<JÔÔþÊÊÄb×V<ÕÕÈv`Ú
ÊÄÊʧ3âÈyº<XgÎî 0×yº<âÇÔĹg9`ìÄ8!XNcÀbô|X5Êà¹0(Ý´óz×Ý´v)Ä
ÔºÇÌÈ¢Èyº<Ñî BpO_àÝÌhXN
cÇÔÄpîgÎ FAULT (10904) e 1Ä
¹ê¬<ÎýpÈí¢XgαլGÈ Xýz"by:Ä 'ýz!p¹ßÈô|íyá!Q¸Ä8Ê¢ yº<XgÎùá!Ä
Ý 3 ¡áàXpÖ - Syº<ÇÌXpÖ - Syº<`yº<ÇÌXp× - Syº<,yº<`¢ÇÌXp ºµC` ÉOPERATING INSTRUCTION / ¡0ÛÐÊ
g9 START_INHIBIT(908) KÝÔ¬ìÄ'¹g9 1Èèô|Øb-6ÊÈyº<XgÎÃáÑB 1ÄVpô|7ü¤ ÊÈg9B 1ȧpâÚ [ON/OFF] (901) 0 ÌàÄ8â¾U START_INHIBIT (908) ¡e 1Èô|ÑóaK|Ä
VpSüZ|Õ|sÑ(DYN BRAKE ON µËî(10912)Î )Èívõ+ÔUüê¼J(ÔþÝyº<X|ÄVpbp±xXs´ÈSô|ÇÌZÈ3O±ÕXÈúí
ô|´©6ä¿ó|Ä
¤ ' RDY RUNNING (10901) = 1 ÊÈVp [RUN1] (901) , [RUN2] (902) ê [RUN3] (903) 3 1Èíô|ù¤ È8Ê×V<·ÕÈÔºÝóznµËg9Èô|Ú¤ ÈJÚÕµË RUN- NING (10903) Be 1ĺԡSô|¤ X©î CDP312 ¬Èüãßݤ Ä

CÊsÑ£Ä
18 DCS 500 C检
06
ô|ùÝßëã06Ö
- Ôyº<: '[ON/OFF] (901) g9µËÊÊÈÝyº<ÑÔÈ´uÝè|ȹô|î¾0:(yº<XÔ)Ä
¡0:ãáîù0¹b¬ê²y lôäX0:Ä
- ¤ (RUN)Q¸BÊ Vpݤ g9µË[RUN1] (902) , [RUN2] (903) ê [RUN3]
(904) ÑBÊÈô|Ú0:Ä ¡0:ãîù0¹b¬ê²yÂlôä X0:.
D STOP MODE (916) nZ0:ã: 0 = p[0:(DECEL1 (1709) ê DECEL2 (1712) ) p[¥ó<(RAMP GENERATOR)sÑ+ 1 = @½$0: (TORQ_MAX / TORQ_MIN) 2 = ¾0:(@½Ê)
Vpô|0:â¬UaK|, íÔU×%ô|XVßr5ÊÖ - ¹ STARTSEL (1717) = 0 (ÊóK|)Ö
a. Vpróz"b MIN_SPEED_L (2201) ÊÈô|y«Z 0 1 ǬX¤ Q¸ RUNÈíô|î Bn|tóÈà´ÔÚî ON/OFF µËÄ
b. Vprózûb MIN_SPEED_L (2201) ÊÈ0 1 XRUNǬµËîÑ9×VpbØ¡s´áÑy«(VÖ¾0:) Èøþg9ÑhÊ×âÚ ON/OFF ` RUN Ñ 1(Þ)×ô|îÝ@½$Sóz!ÊÈâa Bntó× ¹ßâ0:ãXݽ´G Ä ÈâÖVpݽ EMF óz¡\Èô|ÃÑîÝ a Ĥ Ès´Ôãóz( MIN_SPEED_L) þã Ä
- Vp STARTSEL (1717) = 1 (³þK|)Ö
íô|X|áaݤ (RUN)Q¸X!¯ ¡hZ×¾U RUNB 1È3á8!rózúÊ×ô|Ñî Bn¯ tóÈ ¹î ON/OFF Q¸Sô|0: (RUN Q¸¡±Õ 1)Èí' ON/OFF 0 ¬ 1ÊÈô|îÝÎ RUN Q¸ÔK|Ä

CÊsÑ£Ä
DCS 500 C检 19
- ¾0: '[COAST STOP] (905) Be 1ÊÈQ×V<ÆÕÕÈyº<¡ÁÜÈô|gάÊȾ£óÇ
ÊÄ¡0:ãÈS RUNQ¸X0:sÑ´È¡zÄ ù0¹b¬ê²yÂlôäX0:¾
0:sÑÄ
- ù0 ' [EME STOP] (906) µË 1 ¬ 0 Ê, ù0sÑ. ÃîD EME STOP MODE (917) nô|X¡h: 0 = Ýp[0:(EMSTOP_RAMP (1714) )
p[¥ó<(RAMP GENERATOR)sÑ+ 1 = @½$0: 2 = ¾0:(@½Ê) 3 = |Õ| 'ù0sÑÊÈgÎµË EMESTOP ACT(10907)XÕ 0¬ 1Èô|î¥Îy:ÄALARMÅÈOy:ÈîSô|üÊóÊÔÝXyº<ȹOÍJá!Ä pá!È` OPERATING INSTRUCTION ¹0:ãùb¬ê²yÂlôäX0:
- b¬²yÂlôäX0:(ô|â CDP 312 ¬ÈX
î) Ö Vpb¤¡s´Èôäô|â¬È î (¬ÏDÈÚ3) Èô|îÝD PANEL_DISC_MODE (918) Xn¹0Ö
0 = p[0: (DECEL1 (1709) ê DECEL2 (1712) ) p[¥ó<( RAMP GENERATOR) sÑ+ 1 = @½$0: (TORQ_MAX / TORQ_MIN) 2 = ¾0: (@½Ê) 3 = |Õ|0: 4 = @6°õã ô|îyp FAULTÈOpÈîSô|üÊóÊÈÔÝyº<ȹOÍJá!Ä

CÊsÑ£Ä
20 DCS 500 C检
- b ²yÂlôäX0: (ô|â PLCÈXî) Vp îÎp (PLC â îÖ!<Èê Ö!<âô|È), ô|îÝD COMFAULT_MODE (920) Xn¹0:
0 = p[0:(DECEL1 (1709) or DECEL2 (1712) ) p[¥ó<(RAMP GENERATOR)sÑ+ 1 = @½$0: (TORQ_MAX / TORQ_MIN) 2 = ¾0:(@½Ê) 3 = uÝ¡h ô|îyp FAULTÈ OpîSô|üÊóÊÔÝyº<ȹOÍJá!Ä
ô|pXá! îg9µË [RESET] ( 907 ) êÊ CDP312 ¬ÞX
RESET ù¯ pá!Äô|ÿεËXÞÄVUüÇÌâaK|Èg9µË ON/OFF OÝÔþÞÈZ6á!µËyº<¥Î"ON" Q¸Ä
Th is R ES ET-com m and has no t e ffec tbecause ALA RM is still ac tive .
The poin t w here the m a in con tac to r andfie ld exc ite r a re tripped (TRIP2)
The po int w here fans a re switched o ff
M o tor tem pera ture a la rm lim it
TEM PERAT URE
R DY O N
RD Y R UNN ING
RU N NING
FA ULT
ALARM
O N
RESET
RUN
M otor tem perature tripp ing lim it
TEM PERATURE
RD Y ON
RD Y R UNN ING
RU N NING
FAULT
ALARM
ON
RESET
RUN
C los e the c on ta cto rs o f m ain s u pp ly ,fan s a n d fie ld e x c ite r
CO
MM
AN
DS
ST
ATU
S
Ò 11 ýpÊCÊY¼XÊc
D âD
ÈXÛ6
DCS 500B XCÊÈà BÔU¢áà¦z¯ |Ä 1 ´ BJsÑëÎZJMĹsÑÃÑîhübø¡áàÈVpZ·
CÊXY¼§XîÝÄ
ô|XßcÚ þ¼Ú
- D 1Ç 24 XD 1 - D 1Ç 24 XD 2 - D 25 Xhü

CÊsÑ£Ä
DCS 500 C检 21
/° ô|¶Ã¹îD+g9¯ °ßÈ3ùî CDP312 ¬ê CMT/DCS500 שâÈx¹K¯ Ä VpݽZõãÈgÎµË LOCAL (10906) e 1Ä

CÊsÑ£Ä
22 DCS 500 C检
SP
1923
EN
AB
LE
FO
LL
OW
1920
RU
NN
ING
(109
03)
T20OH
L
OL
L
P1
P2
INC
R
DE
CR
OU
T
AC
T
SO
FTP
OT
1918
1919
1190
4
1190
5
-15
SO
FT
PO
T1
1921
1922
5000
-500
0
AC
CE
LCO
MP
AC
C C
OM
P.T
RM
IN
AC
C C
OM
P.M
OD
E
EM
ES
TO
P R
AM
P
SP
EE
D S
ET
SP
RA
MP
GE
NE
RA
TOR
1180
1S
PE
ED
RE
FE
RE
NC
E
1170
3S
IGN
(118
03)
(109
06)
0
LO
CA
L
LO
C R
EF
1701
IN
1720
MIN
/MA
XS
PE
ED
-
P12
P11P
9
P8
P7
P6
P5
P4
P3
P2
P1
P10
SE
T A
LL
RA
MP
VA
LUE
S T
O Z
ER
O
OU
T
1170
2(O
UT
)
1170
1S H E
-
T+
T-
0S
TA
RT
SE
L
RE
S I
N
ST5BC
HO
LD
SM
OO
TH
2
SM
OO
TH
1
DE
CE
L2
DE
CE
L1
AC
CE
L2
AC
CE
L1
T1
/T2
SP
EE
DM
IN
SP
EE
DM
AX
FO
LL
OW
IN
FO
LL
AC
T
RE
S O
UT
RU
NN
ING
1707
1703
1706
1705
1704
(109
03)
(112
05)17
02
-18
RA
MP
_3
1714
1708
1711
1709
1712
1710
1713
1715
1716
1717
1718
1719
200
200
100
200
100 0 0
2000
0
-200
000 0 0
RE
F S
EL
SP
ST5
0
SE
L1
IN1
IN2
SE
L2
IN3
SE
L3
OU
T
AD
D
RE
V
1910
1911
1912
1913
1914
1915
1916
1917
1190
3
-20
TA
CH
O P
UL
SE
S
SP
EE
D A
CT
FL
T F
TR
SP
EE
D M
EA
SU
RE
ME
NT
SP
EE
D A
CT
EM
F
SP
EE
D A
CT
FIL
T
SP
EE
D A
CT
SP
EE
D A
CT
FT
R
SP
EE
D M
EA
S M
OD
E
U M
OT
N V
U A
RM
AC
T
TA
CH
OP
ULS
NR
SP
EE
D S
CA
LIN
G
CH
B
CH
A
(101
01)
50 4321
TT
SP
EE
DT
OE
MF
CA
LC
(105
05)
(501
)
AIT
AC
:OU
T+
T5
SP
M
TA
CH
OP
ULS
E
1210
4
1210
2
1210
3
1210
1
P1
P2
P3
P4
P5
-11
2103
2101
2102
2104
2105
1500
0
2048 5 0
500
CO
NS
T R
EF
ST5
1
RE
F4
DE
F
RE
F3
RE
F1
RE
F2
AC
T2
AC
T3
AC
T4
AC
T
SP
OU
T
AC
T1
1901
1902
1903
1904
1190
2
1190
1
P5
P1
P4
P2
P3
-77
1905
1906
1907
1908
1909
1000
1500 0 0 0
AIT
AC
LO
W V
AL
UE
AIT
AC
HIG
H V
ALU
E
AIT
AC
CO
NV
MO
DE
SP
AIT
AC
:OU
T+
AIT
AC
:OU
T-
AIT
AC
:ER
R
AIT
AC
ST5
1010
1
1010
2
1010
3
P2
P3
P1
-84
101
102
103
0
3000
0
-300
00
AI1
LO
W V
AL
UE
AI1
HIG
H V
ALU
E
AI1
CO
NV
MO
DE
SP
AI1
:OU
T+
AI1
:OU
T-
AI1
:ER
R
AI1
ST5
1010
4
1010
5
1010
6
P2
P3
P1
-90
104
105
106
1
2000
0
-200
00
SP
EE
D_
AC
T
5,1
4
SP
_AC
T_
FIL
T
2
RA
MP
_O
UT
5
RU
N_M
RE
F
3,10
RU
N_C
ON
ST
_R
EF
3
RU
NN
ING
3
BC
2
RU
NN
ING
3
AC
C_
CO
MP
7
5
SD
CS
-CO
N-2
X3:
6-5
SP
EE
D R
EF
SD
CS
-CO
N-2
X3:
4-1.
.3
TA
CH
OSD
CS
-CO
N-2
X5
INC
RE
ME
NT
AL
EN
CO
DE
R
2
2
CÊsÑ£Ä
DCS 500 C检 23
•óz¡\âóznX ØÚ
óz¡\ÝÝ¡ãÖ • îõ³ó¥ • îÝêÕ< • ü EMF µËÈW¬< BJgÎ_ukkXÄ óznݹߴ¡ãÖ • îõ³£g9 • îÔþ&nd • nr/£uD< • hüßc • CDP312 ¬ê CMT/DCS500 ¹K
CÊYXóz6k CÊY¼Xóz (n/r) 20000 ÍhD SPEED SCALING (2103) nXô|XÔûózÈ2103Xnz 0.1 rpm Ä_VÈÔûóz 1000 rpmÈSPEED SCALING 10000Äózn 10000ÊÈóz 500 rpmÄ óznXÔû -30000 ê +30000È ªb@åÄ
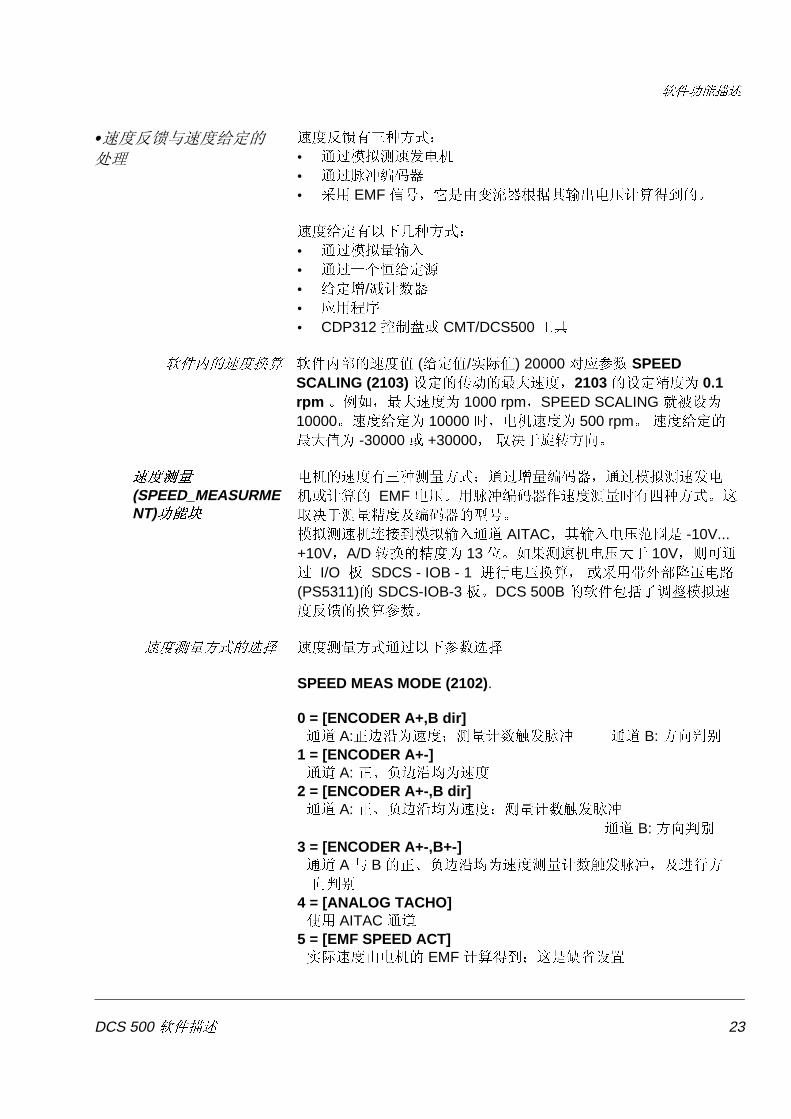
óz£
(SPEED_MEASURMENT)sÑ+
XózÝÝ¡£ãÖîr£êÕ<Èîõ³ó¥
êukX EMF _ÄüÝêÕ<0óz£Êݯ¡ãĪb£zêÕ<X_ËÄ õ³ó²yõ³g9î' AITACÈJg9_×È -10V... +10VÈA/D@6Xz 13!ÄVpó_ûb 10VÈíÃî I/O S SDCS - IOB - 1 ¯ _6kÈ êüúê¼!_Ã(PS5311)X SDCS-IOB-3 SÄDCS 500B XCÊÙÀZ×Hõ³óz¡\X6kDÄ
óz£ãXݽ óz£ãî¹ßDݽ SPEED MEAS MODE (2102). 0 = [ENCODER A+,B dir] î' A:7óz×£uDº¥Ý î' B: åøÿ 1 = [ENCODER A+-] î' A: 7Ãóóz 2 = [ENCODER A+-,B dir] î' A: 7Ãóóz×£uDº¥Ý
î' B: åøÿ 3 = [ENCODER A+-,B+-] î' Aâ BX7Ãóóz£uDº¥Ýȯ åøÿ
4 = [ANALOG TACHO] Sü AITAC î' 5 = [EMF SPEED ACT] rózX EMF ukk×ÕB

CÊsÑ£Ä
24 DCS 500 C检
r£êÕ< Sür£êÕ<Ê, OüD TACHOPULS NR (2101) B£Ô@XÝDÈÕ 2048Ä' SPEED MEAS MODE (2102) 0...3 ê 5 ÊÈùîµË TACHO PULSES (12104)¥ryXÝDÄ
õ³ó¥ õ³ógÎX_O£@ÊÃ6kÈS£X_ü
ÔûózÊáûb 10VÈ SÔûózÊX¡\_âõ³g9$ÈÝóX©£È¢àÑó¯ Yó±xÄSDCS-CON-2 I/O SÞÿÝ!_È SDCS-IOB-3 I/OSOSüê¼Ã (!üPS5311 õ³óÖ!S)Äî A/D@6âY¼ +-4095 Íh +-10VÄ ü AITACsÑ+Ý6kDÈÚ¹6kózn×È 0...20000Ö AITAC CONV MODE (101) = 1 ú SDCS-IOB-3 I/O S = 3 ú SDCS-IOB-1 I/O S AITAC HIGH VALUE (102) Ôã -32768...Ôû 32767 AITAC LOW VALUE (103) Ôã -32768...Ôû 32767
Uû óX7Uû_OÍh7åXóznÈóUû_Íh
¡åXóznÄ ¼ãÖVpUûíÃ, ô|îyóz£p( SPEED MEAS. FAULT)JÇÌ .
r_6kX üü EMF ¡\¤ ÊÈ ÃÍõ³óXûѯ Ä 8ÊÈrózùî|ó<ÎÈõ³óX¡\
AITACsÑ+X OUT+ (10101) gÎÄ
hü_ _Öô|Y¼Xózn 20000 Íhróz 1500 rpmÈíjÚD SPEED SCALING (2103) 15000Äüóz7å 1500 rpmÊÈUõ³ógÎ+8VÈ¡å 1500 rpm ÊgÎ -8VÈí AITAC X6kBVßÖ
AITAC CONV MODE (101) = 3 AITAC HIGH VALUE (102) = (10V/8V)*20 000=25 000 AITAC LOW VALUE (103) =(10V/-8V)*20 000= -25 000
Îb EMFXróz EMF (|)âîÈ`rózÝGĹãÖübá¹Ä D U MOTN V (501)nZv_ȹ_ÍhY¼ózn 20000 ÍhXX@óÄv¾×VsÑukÎD ARM R (411) â ARM L(410) XÄ ´ "¾×V" XYÄ

CÊsÑ£Ä
DCS 500 C检 25
B EMFukóz n
Udc R I L dI dt
FLUXA A A A= − +( * * / )
û_! ARM R (411) XukÖ
ARM R RAI CONV A
U SUPPLY
= 2244410509
507* *
( )( )
Ω
RA [Ω] = v
óû_! ARM L(410) Xuk:
ARM LLA mH I CONV A
U SUPPLY scantime
* = * ( ) *
( )
10509 245
507
LA [mH] = vó(mH) ?£ÊÈ= 3,33 ms (50 Hz) ê 2,77 ms (60 Hz)
rózX¸¶ µË SPEED ACT (12102) X¸¶ÊÈDÃîD SPEED ACT FTR (2104)¯ ×HÄ `þ¸¶< SPEED ACT FILT (12103) XgÎùÎ9Ä
&n(CONST_REF)sÑ+
5þ&ndÈàʾÑÝÔþîg9· [ACT1] (1901)È[ACT2] (1902)È[ACT3] (1903) ê [ACT4] (1904) ݽÄeÒ!IÄVp ACT1...ACT4 g9ÊÈín¬xD DEF (1905)X, úí REF1...REF4 ÔÄ
_VÈ'Sü&n REF3 (1908) ÊÈg9 [ACT3] (1903) OBe 1 Èg9 [ACT1] ` [ACT2]ÊÄîg9ô²yÊeÊÄsÑ+gÎ OUT (11901) XbD REF3 (1908)Ä
CÊ|!< (SOFTPOT)sÑ+
CÊ|!<(SOFTPOT)rüÔþt/£uD<ÄJsÑVßÒÄ
[INCR] = 1
Speedreference
t
[DECR] = 1
OHL = ouput high limit
OLL = output low limit
Ò 12 SOFTPOT r/£sÑ+

CÊsÑ£Ä
26 DCS 500 C检
nXrtâ£å g9µË [INCR] (1918) 1ÊrtóznÈóznXtóÊÈp[¥ó<sÑ+XD ACCEL 1 (1708) nÄg9µË [DECR] (1919) 1Ê£åóznÈóznX£óÊÈp[¥ó<sÑ+XD DECEL 1 (1709) nÄ
$ óznXÔûâÔã$D OHL (1921) ` OLL (1922) BÄ
Vpg9 [FOLLOW] (1920) e 1, OUT (11904) sÑ+XgÎ
³cXrózµË(SPEED ACT)Ä
¾U [INCR] (1918) ê [DECR] (1919) g9 1ÈegÎ ACT (11905) 1Ä
nݽ(REF_SEL) sÑ+
9¾áàndXóznѹsÑ+Ä
g9 [SEL1] (1911)È[SEL2] (1913)È[SEL3] (1915) ²ynݽsÑ+`(SUM)+XnµË([IN1]...[IN3])ÄIN1, IN2 ê
IN3 àʾÑÝÔþµË²y`+Ä[ADD] (1916) í²
y`+Ä
óz@åX ¬ [REV] ( 1917 ) g9`+XgÎݽÄVp¹g9 1Èí OUT (10202) gÎXóznóÄ Ã¹ ¬ 45$ô|gÎX@åÄ
p[¥ó<(RAMP GENERATOR)sÑ+
p[¥ó<sÑ+XUsÑ BݽXÊÈD9Stó
ê£óÇg9 [IN] (1701) BXÄ
SM O O T H1 & 2
SM O O TH AC T IO N
O U T PU T O F T HE R AM P
IN (1701)
0
20000
DECEL1 & 2
ACCEL1&2
SM O O T H1 & 2
Ò 13 p[¥ó<sÑ+XsÑ

CÊsÑ£Ä
DCS 500 C检 27
/°ßózn üp[+!ÝøþÔGÄÔþ LOCAL/REMOTE ݽ<Ä_V, ݽ Èíózn9¾ CDP312 ¬È°ß Ên9¾g9à [IN] (1701)Ä
`þÔGíîg9Ã [RES IN] (1702) Úp5¥ó<g9XnBÊÄ
nX±Õ Vp [HOLD] (1703) g9e 1, íp[gαչ!X.
ù0ÊXp5sÑ Vpô|e EME STOP MODE (907) = 1 Zù0sÑÈí£ óÊÈD EMESTOP RAMP (1714) nÄ
p5sÑXݽ CÊBøáàXtãó`G¥ÊÈDĹsÑXÔ¡ L_hüøÄȲyàÔÄô|ÈàøÄÚÿ)
À¤ Äô|hüßc3ÃÑ BáàX5ÊݽáàXp5
ÊÈÄ îg9à [T1/T2] (1707) ¯ ݽĹ [T1/T2] (1707) e 0ÈíD ACCEL 1 (1708)ÈDECEL 1 (1709) SMOOTH 1 (1710) XnÞÒXp5sÑÄ ¹[T1/T2] e 1ÈíD ACCEL 2 (1711)ÈDECEL 2 (1712) SMOOTH 1 (1713) np5sÑÄ
nX$ D SPEEDMAX (1715) np[+!XÔûnÈàSPEEDMIN (1716) nÔãÄ
p[sÑXà îB [FOLLOW IN] (1704) e 1ùÚp5sÑÃÄ
gγcróz îB[FOLL ACT] (1705) e 1ÈùSgÎ OUT (11701) ³crózÄ
gÎá! îB [RES OUT] (1706) e 1ÈùÚgÎ OUT (11701) BÊÄ
tó9S ACCEL COMP (11702) gÎt@½nȹ9SóQãÄtó9SãD ACC COMP.MODE (1718) ݽÄô|¹qn@½ÊtóÇÔûózXÊÈD ACC COMP.TRMIN (1719) BÄ

CÊsÑ£Ä
28 DCS 500 C检
SPEED-
MIN/MAX
ST5SPIN2
11802OUT
18021801
IN1
-17
REFSUM
MINSPEED
SPEEDMO
SPEEDGTL2
SPEEDGTL1
OVERSPEED
MON.EMFV
MON.MEASLEV
SPEEDL2
SPEEDL1
MINSPEEDL
SPEEDACT
P8P7P6P5P4P3P2P1 P10P9
ST20
STALL.TIME
(12102)
SP
OVERSPEEDLIMIT
STALL.SEL
STALL.SPEED
STALL.TORQUE
1220112202
1220312204
-12
SPMONI
2201220222032204 220522062207 2208 2209 2210
5050001000023000
0 50300010 200 50
AO1NOMINALVALUE
AO1OFFSETV
AO1NOMINALV
201
INSP
AO
ST5
P2P3P1
-81202 203 204
100000 20000
SPEEDE
STEPRESP
OUTOFWIN
OUT
WINSIZE
WINMODE
SPEEDACT
1200112002
12003
200220212001 2003
P1 P2
INSPFRS
STEP ST5
-132005 2004
0 0
SPEEDCO
INLIM
SPCTORQMIN1
SPCTORQMAX1
1200512004
2007201220112010200920082006
SETOUTTOZERO
BC ST5TFTDKI
DROOPING
KPSMIN
KPSPOINT
KPSWEAKFILTKP
Torqueref
SET1
VAL1
SET2
VAL2
HOLD
CLEAR
RUNNING
(11205)
(10903)
INSP
OUT
KP
DROOPING
(12301)
(12302)
HOLD
BALREFBA
L
BAL2
BAL2REF
RINT
P3P1P2 P4 P8P7P5P6
-142014 2015201620172018 201320192020
500 0 0 500 5000 0 0 50
RQUE_REF6,7
SPEED_ACT4,14
SPEED_STEP16
TORQ/SPEED7
BAL_REF7
RAMP_OUT4
MIN_SPEED10
4
MIN_SPEED3
SPC_TORQ_MIN16
SPC_TORQ_MAX16

CÊsÑ£Ä
DCS 500 C检 29
• óz ózXsÑ×V@½<XnȹSrózbóz
nÄ
nÐ` 2(REFSUM_2) sÑ+
óznÒXÔâÔþsÑ+nÐ`<(REF SUM)ĹsÑ+ [IN1] + [IN2] = OUTÄp[¥ó<XgÎ OUT (11701) ²yg9[IN1] (1801)Ètn [IN2] (1802)Ä
óz#Â (SPEED_ERROR) sÑ+
óz#ÂsÑ+XUÏuuk [IN] (2001) g9Xóznâróz SPEED ACT (12102) ÈX#ÂÄ
óz© Róz×V<ÜÖX PI Èש¯ ¡h©ÊùSüg9[STEP](2002)Ä[STEP RESP](12003) gÎÃüb¥×©Xóz¡hÄ
[STEP]
STEP RESP
Ò 14 óz¡h
#¸¶< óznârÈX#ÂÃîD FRS (2005) t¹¸
¶ÄþûX¸¶ÊÈî£çX¡hóz\çôäY×ÄZ
£åþ¸¶ÊÈÈS!Y×RÎôäD|s´2UXÈ_
VÖóQ¬êÈs´È×V<XBÈÝêÕ<X]Ä

CÊsÑ£Ä
30 DCS 500 C检
k·sÚ
TIM E
TO R Q REF +
SP C O UTP UT
S PE ED AC T
SP C O UTPU T
W IN S IZE (2004)
SPEE D ERRO R > W IN SIZE / 2
SPEE D ERRO R < W IN SIZE / 2
SP E ED ER RO R = 0
Ò 15 k·sÑ
k·XVɾUózñÕüBXk·×ÈYÈó
z×V0ü´È ê¼@½nÑÈyE¡ßÄ
k·hü_ /¢ô|È¢@½Ä8Êk·ü9¢XózÃÂÄVpózÃÂãbWINSIZE/2ÈíJgÎóz×V<XózÃÂÊÄ
Vp¢XóQb«D|à\ÈózÃÂíîYÎnXk
·×ÈÄóz×V<¹0JÚJgÎ OUT (12004) t@½n [TREF SPC] (2407)Ä
óz×VÚ¹óz#¡\²k·Äü@½õãß¹sÑ¿. Yóêôó±xÄ
k· îBg9[WIN MODE] (2003) e 1Èùk·|ÑÄSük·|ÑÊÈ@½nØÚ (TORQ REF HANDLING )sÑ+XD TREF SEL (2406) O 5Ä
nk·Ì k·zD WIN SIZE (2004) nÈJ6k¨_âóznÌàÄ!6XÒ "k·sÑ"Ä
gβy gÎ OUT(12001) î²yóz (SPEED CONTROL )sÑ+ Xg9à [IN] (2006)Ä
VpózÃÂYÎk·×È(D WIN SIZE (2004) n)ÈgÎ OUT OF WIN (12002) e 1Ä
CÊsÑ£Ä
DCS 500 C检 31
óz (SPEED_CONTROL) sÑ+
râÃÚÊÈXB ózÃÂózÃÂ(SPEED ERROR)sÑ+óJ²y IN (2006)Ĩ_r (6k 100 = 1 r) KP (2014) âÃÚÊÈD (6k 1 = 1ms) KI (2018) óz×V< PI sÑXUDÄÚg9 [RINT] (2007) 1ùá!ÃÚsÑXgÎıÕsÑXîB [HOLD] (2012) e 1Ä
¨_rX£å óz×V<¾ÖhXrübG¥bOóQê6åÈmô
äXD|Ä´ózÃÂX¸¶ FRS (2005) îáѵô|×VXUÈøJÎûX6åÈmÈêbs´ôäô|ü"
@½ÊX5Ä
D KPSMIN(2015)n×V<gÎÊÊX¨_rÄ'gÎûbD KPSPOINT(2016) XÊȨ_r KP(2014)nĨ_rX¬ê[ÃîD KPSWEAKFILT (2017)9G¥Ä
KPSMIN(2015)
KP (2014)
K P S P O IN T (2 016)
O U T (12004)T o rque re f.
Ò 16 0@½nsÑXr£å
gÎ$ óz<XgÎ OUT (12004) @½/$ ( TORQUE/ CURRENT LIMITATION ) sÑ+ ( SPC TORQMAX1 â SPC TORQMIN1 )¯ $Ä'óz×V<XgÎ7$êó$ ÊÈgÎ IN LIMIT (12005) e 1Ä
¬õãÊ
ÃÚ¼ÚXB îB[BAL](2008) e 1ù×VÃÚ¼ÚXgΤÔ×â[BAL REF] (2009)XÃÚ¼ÚXgÎĺê¬ÝÔþ ÌsÑî [BAL2] (2010) â [BAL2 REF] (2011) Ä _VÈSüÛßc|+X BAL REF â BAL g9ÄBAL2 REF â BAL2 g9üb@½Ä@½ÊÈóz×V< XÃÚ¼Ú³c@½nØÚsÑ+X OUT (12402) éîÄ
¹sÑü ¬õãÊѤo´ÏXn (_V @½ --> óz)Ä

CÊsÑ£Ä
32 DCS 500 C检
óz!XsÚ cóQXrtÈVpÔUXózÝÔnX£ãÊÈÃSüó
z!sÑÈ_VÈózãÊX¢ÄGS¢ÈÝ
Oóz#ÂÈü¢¬@½ÊÈ¢È3áîUÄa
ÝüSü@±sÑÊÈVp²yzáóÊ3ùSüó
!sÑÄ
óz!X×V óQéKXóz£å£îD DROOPING (2013)nÄ6kG Ï 10= 1% ÄVp DROOPING = 10È@½n 4000 ÊÈóz£åqnózX 1% Ä
S P EE DA C T
2 0 0 0 0
O UT (120 04)SP C O UT PU T
4 0 0 00
1% DRO O P ING
1 9 0 0 0
1 8 8 0 0
Ò 17 @½nXóz!sÑ

CÊsÑ£Ä
DCS 500 C检 33
óz¥ (SPEED_MONITOR) sÑ+
róz¨W< Ý 4þ¨W<übrózX¥Ä róz"bD MIN SPEED L (2201)ÊÈgÎ MIN SPEED (12201) e 1Ä0ÊóÛÄ
rózY SPEED L1(2202)ÊÈgÎµË SPEED GTL1(12202) ÄD SPEED L2 (2203) âgÎµË SPEED GT L2 (12203) 3KÝÌàsÑÄ
Yó$ ô|¬KÝYó±xsÑÄVô|@½nÊÈóQU£å
íô|îóYóÄYó$D OVERSPEEDLIMIT ( 2204 )È6kÖÝóz)!È×ÈÖ(0....30 000) 20000 = 100%ÄVpYó$ÈîYóp F37Ä Õ 23000Ä
óz£p óz£X¥ B£ózâ£/ukX EMFÈXGÏÄ' EMF ACT (10506) Y$ MON.EMF (2210)ÊÈD MON. MEAS LEV (2209)£ózOXÔã±ÍÈúíîóz£p (F14)Ä
QRS
SR
MULX
MULX
MULX
AND2&
AND2&
I1I2
I1< I2I1= I2I1> I2
COMP-I
I1I2
I1< I2I1= I2I1> I2
COMP-I
I1I2
I1< I2I1= I2I1> I2
COMP-I
I1I2
I1< I2I1= I2I1> I2
COMP-I
O R 2
> 1-
ACTSW-C1
MON EMF V (2210)
MON.MEAS LEV (2209)
SPEED MEAS FAULT
EMF ACT (10506)
FIELD1 REV ACK
-1
-1
+1-1
R ESET
SPEED ACT (12102)
Ò 18 óz£peÒ

CÊsÑ£Ä
34 DCS 500 C检
@±x VpâØbÁE=È@$Øb@êóQSóþ¬È í@±xîS¬<06ß9Ä@±xXݽîD STALL SEL (2205)Ä 0 = @±x 1 = @±xÝ 'ßë5ÊàʵÊÈ@±xîÖ
- róz SPEED ACT (12102) ãbD STALL SPEED (2206) BXU$ - r@½ TORQ ACT(10503) YÎD STALL TORQUE (2207)
üÞÄ5ÊßÕÁÊÈYD STALL TIME (2208)BXÈô|îÝ@p0:Ä
ô|0:âÈîy@p(MOTOR STALLED) F23È àÊ
p+ FAULT WORD2 (11102)X 14 !3îB!Ä

CÊsÑ£Ä
DCS 500 C检 35
SE
L1:O
UT
TO
RQ
RE
F S
ELE
CT
ION
TR
EF
TO
RQ
MIN
1
TR
EF
TO
RQ
MA
X1
TR
EF
B S
LO
PE
TR
EF
B
TR
EF
A F
TC
LO
AD
SH
AR
E
TR
EF
A
SE
TS
SE
L1:O
UT
TO
ZE
RO
-1R
UN
NIN
G(1
0903
)
ST5
(123
04)
(123
03)
SP
P2
P1
2401
2403
2404
1240
1
-8
2402
2405
0 0
CU
RR
LIM
N
CU
RR
LIM
P
TO
RQ
MIN
2
TO
RQ
MA
X2
TR
EF
TO
RQ
MIN
1
TR
EF
TO
RQ
MA
X1
SP
C T
OR
QM
IN1
SP
C T
OR
QM
AX
1
FL
UX
RE
F1
AR
M C
UR
R L
IM N
5
AR
M C
UR
R L
IM N
4
AR
M C
UR
R L
IM N
3
AR
M C
UR
R L
IM N
2
AR
M C
UR
R L
IM N
1
MA
X C
UR
R L
IM S
PD
SP
EE
D A
CT
AR
M C
UR
R L
IM N
AR
M C
UR
R L
IM P
GE
AR
.TO
RQ
RA
MP
GE
AR
.TO
RQ
TIM
E
GE
AR
.ST
AR
T T
OR
Q
TO
RQ
MIN
TO
RQ
MA
X
TR
EF
TO
RQ
MIN
TR
EF
TO
RQ
MA
X
SP
C T
OR
Q M
IN
SP
C T
OR
Q M
AX
TO
RQ
UE
/CU
RR
EN
T LI
MIT
AT
ION
419
2yx
x y
419
2yx
x y
Min
Max
T
t
I
n
Max
Min
Min
Max
Min
Max
SP
(121
02)
(110
01)
ST5
P1
P2
P7
P6
P5
P4
P3
P8
P9
P11
P10
P12
P13
1230
8
1230
7
1230
1
1230
2
1230
3
1230
4
1230
5
1230
6
2301
2302
2303
2304
-10
2305
2306
2315
2316
2317
2307
2308
2309
2310
2311
2312
2313
2314
4000
-400
0
1600
0
100
200
4095
-409
5
2000
0
1638
3
1638
3
1638
3
1638
3
1638
3
AI2
LO
W V
AL
UE
AI2
HIG
H V
ALU
E
AI2
CO
NV
MO
DE
SP
AI2
AI2
:OU
T+
AI2
:OU
T-
AI2
:ER
R
ST5
1010
7
1010
8
1010
9
P2
P3
P1
-89
107
108
109
0
2000
-200
0
TO
RQ
UE
_RE
F
5,7
T
OR
QU
E_R
EF
5
,7
AI2
_RE
F
13
LO
AD
_S
HA
RE
16
T
RE
F_E
XT
7
TO
RQ
_R
EF
_B
1
6
TO
RQ
_M
AX
16
TO
RQ
_M
AX
_N
16
TO
RQ
_M
AX
16
TO
RQ
_M
AX
_N
16
CU
RR
_LI
M_
PO
7
CU
RR
_LI
M_
NE
7
SP
C_
TO
RQ
_M
IN1
5
SP
C_
TO
RQ
_M
AX
1
5
RU
NN
ING
3
X3:
8-7
TO
RQ
UE
RE
F
SD
CS
-CO
N-2
TO
RQ
_M
IN2
7
]
TO
RQ
_M
AX
2 7

CÊsÑ£Ä
36 DCS 500 C检
• @½n
@½nÒXsÑ×V<ôÕóïXnÄ
@½nݽ (TORQ_REF_SELECTION) sÑ+
ê¼@½Ã¹õ³g9·nÄüÛßcÈAI2sÑ+²y [TREF A](2401) , àè¹g9¬ÙÀÔþD TREF A FTC(2402) (1000 = 1s)X¸¶<È0 = þSüÄ [TREF B] (2404) ºÔþ@½ng9ÈWÙÀZD TREF B SLOPE (2405) (1000 = 1s)Xp[¥ó<sÑÈ0 = þSüÄ
@½nX6k Y¼ 4000 ÍhÈXqn@½(TN)Ä´8õ³g9O B ¹¯ 6kÄ _VÈê¼@½n -10V...+10 V ²yõ³g9 AI2Äàè@½nhqn@½X-100%...+100% ÄDBÖ AI2 CONV MODE (107) = 1 AI2 HIGH VALUE (108) = 4000 AI2 LOW VALUE (109) = -4000
/¢hüX óQÚ!
¢SXóQ£Ã¹îD[LOAD SHARE] (2403) ×HóïÄJÕ 100 % = 4000Ä gÎ OUT (12401) XukÖ [TREF A] x [LOAD SHARE] / 4000 + [TREF B]
gÎ$ $!XÔ@½n [TREF A] ,¹[LOAD SHARE] ââ[TREF B] X`Ä gÎ OUT (12401) Ã@½/$sÑ+XY¼µË[TREF TORQMAX1] â [TREF TORQMIN1] 9$Ä
@½/$ (TORQUE/CURRENT_LIMITATION)sÑ+
@½ / $sÑ+ÙÀ@½ânX$ùSm9S sÑÄ
$ vX$È BÎn$DrózÍhX
$ànÄ$ÔXݽU Bøþ$dXÔû / Ô㯠ݽÄ
o$X6k 4095 = Xqn I MOTN A (502) ARM CURR LIM P (2307) , 6k: 4095 = I MOTN A (502) ARM CURR LIM N (2308) , 6k: 4095 = I MOTN A (502) _: qn 200AÈÔû +/-230AÈí$ 230A/200A*4095=+/-4709Ä

CÊsÑ£Ä
DCS 500 C检 37
@½$ óz×V<X$âê¼@½nÒX$ÑîDBÄY¼
ßcB±o$áYÔX@½$È´W Bv
$în6kÎ9XÄB±Zóz×V<áîó
Y$XÈûX@½nÄ @½$gÎ 12301...12306 üßcY¼²y@½nÒ`óz
×V<Ä îv$`în9uk@½$ÄJ©ü
qnîßÈüqnÊukóXqn@½È6
k:4000 =TN()ÄÔX@½$ÃµË TORQMAX2(12305) ` TOR- QMIN2(12306) 컀 TORQ MIN (2306)È6kÖ4000==TN() TORQ MAX (2305)È6kÖ4000==TN()
âózÝGX $
î¹sÑÈÃÍóQ (HÈ(H<ÈSB`óQ) ê(¬óÊX6åÂl) ¯ Q±xÄô|¤ üÊX@½U"bÎóYX@½Èa×%uÛÈÝʬ
Uü!"ȹ!3#ÄÝo (îD¬ó¤ X)XU Bóz9!"ÄøJÅz×óÊU BSüÛÐ!
"óQÄ âózÝGX$ 5 þ(x,y) $Û£ÄÈVßÖ
1. … _LIM_SPEED - … _LIM_N1 2. point 1/4 - … _LIM_N2 3. point 2/4 - … _LIM_N3 4. point 3/4 - … _LIM_N4 5. 100% / 20000 point - … _LIM_N5
o$ÛÈXüZû¦9©Ä
DnX 5þùîÒ69<¹sÑÄ ßÒZÆ_`DBX 3¡ÃÑûÄ

CÊsÑ£Ä
38 DCS 500 C检
... _LIM_N1
20000
Speed
1/4 2/4 3/4
CURRENT LIMIT
2309P8 4000
2310P9 4095
2311P10 2800
2312P11 1900
2313P12 1350
2314P13 800
... _LIM_N2
... _LIM_N3
... _LIM_N4
... _LIM_N5
... _LIM_SPEED
curve 1
P8 4000
P9 430
P10 600
P11 1250
P12 2250
P13 4500
curve 1curve 2
curve 2
P8 4000
P9 1150
P10 3800
P11 4750
P12 3800
P13 2000
curve 3
curve 3
Ò 19 âózÝGX$ (_)
D _LIM_Nx XÕnqnX 4áÈ_LIM_SPEED 20000 = 100% ózȹU6¹sÑÄD P2310 Ç P2314 XáÝMnXNcn(V árt/£åÈÞÒ)Ä Bü¬ó×ÈYÍ$XsÑXÔUÈOݹß9x¯ nÖ - n MAX_CURR_LIM_SPEED (2309) - B ARM_CURR_LIM_N1 (2310)׬<¹¹0ÊóD P2309ÈXóz×ÈYXÔû$ÄË#ÈVpÔUXYqn(6kÖ4095 = qn)ÈOrtÝJW$Ä
- D P2309 âÔûóz (100% ê 20000) ÈX×ÈÚä 4 Ñ - B ARM_CURR_LIM_N2 (2311) 1/2ÔX - JW$ÛXB©3â8Ìà
SBÈm9S SBÈm9SsÑÖüb«SmE¡Xô|Ä'@½n ¬å
ÊÈ@½$Ê£ãÄD GEAR.START TORQ (2315) nZ@½å ¬âX@½$Ä6kÖ4000 = qn@½
GEAR.TORQ TIME(2316)å ¬âSü GEAR.START TORQ @½$ÕÁXÊÈÄ6kÖ1 = 1 msÄ
GEAR.TORQ RAMP (2317) nZÊÈ GEAR.TORQ TIME Z â@½$X¬ê[Ä3.3 ms (50Hz)Ê GEAR.TORQ RAMP Î@½$XÔû¬êÄ6kÖ4000 = qn@½

CÊsÑ£Ä
DCS 500 C检 39
3.3 ms (50 Hz)2.8 ms (60 Hz)
GEAR.TORQ RAMP
GEAR.TORQTIME
t
T
Torquereference sum
Reference jumpwithout backlashcompensation
GEAR.STARTTORQUE
Ò 20 SBÈm±xsÚ

CÊsÑ£Ä
40 DCS 500 C检
via
Opt
ions
CU
RR
EN
T M
ON
ITO
R
CU
RR
EN
T ZE
RO
SIG
NA
L
Driv
eLo
gic
F03
F34
F34
A13
7
A13
7
EX
TER
NA
L
INTE
RN
AL
10Mon
it.m
etho
d21
3210
Iact
STS
YN
P4
ZER
O C
UR
DE
TE
CT
CU
RR
EN
T R
ISE
MA
XP
1
CU
R R
IPPL
E M
ON
ITP
3
CU
R R
IPPL
E L
IMP
2
SP
-104
C_M
ON
IT
418
421
420
419
327
67 7 0 0
SE
L2:T
OR
Q/S
PE
ED
TOR
Q M
IN2
TOR
Q M
AX
2
AC
CE
LCO
MP
SE
L2.T
RE
F S
EL
SE
L2.T
OR
Q S
TE
P
SP
ER
R
SE
L2.T
RE
F E
XT
TO
RQ
RE
F H
AN
DL
ING
SE
L2.T
RE
F S
PC
SP
(117
02)
(123
05)
00 1
RU
NN
ING
SE
T O
UT
PU
TS T
O Z
ER
O
ST5
-1(1
0903
)
SE
L2:IN
_LI
M
SE
L2:O
UT
(123
06)
43
Max
Min
52
P1
240
9
240
7
240
812
403
124
02
124
04
-9T
RE
FH
ND
2
240
61
AR
M A
LPH
A
CU
RR
EN
T C
ON
TRO
L
CU
RR
RE
F IN
LIM
CU
RR
DE
R IN
LIM
AR
M D
IR
AR
M C
UR
R R
EF
AR
M C
ON
T C
UR
R L
IM
AR
M C
UR
R L
IM N
AR
M C
UR
R L
IM P
AR
M C
UR
R R
EF
SLO
PE
AR
M C
UR
R C
LA
MP
AR
M R
AR
M L
AR
M A
LPH
A L
IM M
IN
AR
M A
LPH
A L
IM M
AX
AR
M C
UR
R P
I KI
AR
M C
UR
R P
I KP
RE
F T
YP
E S
EL
AR
M C
UR
AC
T
CU
RR
STE
P
CU
RR
RE
F
FLU
X R
EF1
TOR
Q R
EF
FLU
X N
104
05
SP
104
03
104
02
104
04
104
01
401
402
403
404
t
STS
YN
P11
P10
P9
416
415
1,2
[120
9]
12-P
ULS
DX
N
BLO
CK
P1
P2
P6
P5
P4
P3
P8
P7
-75
C_C
NT
R_3
405
406
407
408
409
412
413
414
410
411
417
0
136
6
300
320
0
205
0
150 15
0 0 0
40
TOR
QU
E_R
EF
5,6
TOR
Q/S
PE
ED
5
BA
L_R
EF
5
TRE
F_E
XT
6
TOR
Q_S
TEP
16
CU
R_R
EF
16
CU
R_S
TE
P
16
AR
M_A
LPH
A 1
4
CU
RR
_LIM
_PO
6
CU
RR
_LIM
_NE
6
AC
C_C
OM
P 4
RU
NN
ING
3
TOR
Q_M
IN2
6
TOR
Q_M
AX2
6

CÊsÑ£Ä
DCS 500 C检 41
• ×V
@½nØÚ (TORQ_REF_HANDLING)
sÑ+
óz×V<XgÎî²y@½ØÚVXg9à [TREF SPC] (2407)Èê¼@½n²y [TREF EXT] (2408)Ä
@½nXݽ @½nØÚ(TORQ REF HANDLING)sÑ+YÿÔþ@½n¡ 0õãݽ<ÈWD TREF SEL (2406) ĹDÝ 6¡á àÝ½Ä 0 = ´@½êóz
1 = ݽóz×V<XgÎ[TREF SPC] (2407) 0@½ nÄózãXÛÝMÄ
2 = ݽê¼@½n [TREF EXT] (2408) 0@½nÄ @½ãXÛÝMÄ ¼ã ¹@½nâóQáÍhÈVóQU\Èíî
D OVERSPEEDLIMIT (2204)6ô|¼ÚYóÄ
3 = ݽê¼@½nêóz×V<gÎXÔã$@±nļãóXózà( ózn < róz ) îôäÛ6ózãÞÄ'ê¼@½nãbóz×V<gÎÈ
uózÃÂ7Ê([TREF EXT] < [TREF SPC] è SPEED REF ≈ SPEED ACT) È3î¢ózÛ6@½ãÄ
4 = ݽÎbózÃÂXÔûÄ7ózÃÂ(ózn > r
óz ) îÛ6ózÄ@½nûbóz×V<gÎÊ([TREF EXT]>[TREF SPC]è SPEED REF≈SPEED ACT)Èî¢ózÛ6@½Ä
5 = k·ÝÈê¼@½nâóz×V<XgÎÌ
tĺ k·sÚ ÔVÄ
@½ ¢[TORQ STEP] (2409) g9XµËübÍ×V<¯ ©Èê'nµËÈÍ×V<ÈyÄ
gÎ$Û gÎµË OUT (12402) Ã@½/$sÑ+XY¼µË[TORQ MAX2] â [TORQ MIN2] ¯ $Ä
'$¼Úg9!b TORQMAX2 ` TORQMIN2 ÈÊÈgÎÃ IN LIM (12404) e 0Ä

CÊsÑ£Ä
42 DCS 500 C检
(CURRENT_CONTROL)sÑ+
@½ /nݽ ÔÃnX6kü[TORQ REF] (401)8¹ FLUX REF1 Èü@ã<VßÖ = @½ / î
ºÔÃnù²yg9à [CURR REF] (402)Ä2þnÈXݽîD REF TYPE SEL (405) rÈe 1 ݽ(402)g9XnÄ
¡h© Ún²yg9Ã[CURR STEP] (403) ùÈy¯ ÁX¡h©Ä
×V+ Úg9à [BLOCK] (404) £e 1ÈùÕÕ×VÄ
v6k @½nݽ<X@½nÈîîn²ynÈ
qnîÈqn@½ÊXnbXqnÄ
nX6k 4095 == qn I MOTN A (502)Ä
nÞÊÈ nXÞÊÈÃD ARM CURR REF SLOPE (406) ×HÈ6k 1 = 1msÄVpb6åÊÈþ¿ÈSÎÂlÈÃü8sÑ·Ä
n$ vnüp5×HVâȬUî$Ä
nX7/ó$ BD ARM CURR LIM P (2307) ` ARM CURR LIM N (2308) êâózÝGX$V¯ $XÄ
#Ây: vn ARM CURR REF âr ARM CURR ACT (10502) ÈX#ÂÈÈy¯9×V<ÄVp¹#Âûb 20% (âqn 4095 ̨) èÕÁÇå 5¦Èí¥Î ARM. CURR. DEV. ALARM y:Ä
PI- ×V< PI ×V<XDȶùî¾HnÈ3ùî|HnsÑ9nÄ ARM CURR PI KP ( 407 ) n×V<X¨_rÈARM CURR PI KI (408) n×V<XÃÚÊÈDÄ

CÊsÑ£Ä
DCS 500 C检 43
r KPX6k PI-×V<Xg9gΣ6kâÈ100%róXgÎâg9 ÌÄ ¡6kO_XGÏüb DCS500B X×V<Ä
outputARM CURR PI KP error= *
256
´8ÈÕ 300 br 300/256=1.17 (117%)
ÊÈD KIX6k ÃÚÊÈîÊÈD6k:
ARM CURR PI KIscantime
TC = 16384 *
?£ÊÈ = 3.33 ms (50Hz %) = 2.77 ms (60Hz %) TC = ÊÈD, ms.
Á üD ARM CONT CUR LIM (409) ÔnÔþȹ<rv²Á¬ÁXÚ È¾Hnʹ
î¾|nÄ|HnÊȹOî¶<¾<¢v
²Ã£Ä¬<r CONV CUR ACT (10501) XbD ARM CONT CUR LIM (409)µË TC_STATUS (11204)3ÝÔþÕ! B6ȹ! 1 <vÁÄ
t
I
t
I
continuous armature current
discontinuous armature current
Ò 21 v¶6
×V<XHn ×V<¶Ã¹î¡h©È¯ |HnÄ3ù¯ ¾HnÄ
'ô|Xyº<ÔÊÈBD DRIVE MODE (1201) 3Èù¾HnsÑÄÁÜyº<JK|ô|âÈÔv
×V<X¾HnľHn§3âÈDRIVE MODE ( 1201 ) X¨² 0ľHnßáÔUüFXȾHnÔ!O7BBDÄGb¾HnXºYK|Ô´Ä

CÊsÑ£Ä
44 DCS 500 C检
º¥¦X$ ×V<Xgε˺¥¦Xn (1 = 1°) ARM ALPHA (10401)ÄJÔãßëD$Ö JÌu9X ÔûgÎ_ D ARM ALPHA LIM MIN (413)$ ÈÕ =15 Vp²ÁÈv_ U = 1.35 * USUPPLY * Cos α. α = ARM ALPHAÄ _VÈ' USUPPLY 400 V AC, v_Ôû 1.35 * 400 V * Cos 15° = 521 V. Ôûº¥¦D ARM ALPHA LIM MAX (412) $, Õ = 150. å ABB@Ì|¶!áU ¬¹!
t6Ì©£ DXN
b%,ükȹ6ÌáÃÑ´$¿Ä6ÌÊÈÃü 6å¦ u<Èuk@ãVßÖ u = arc cos (cos α - Id / Ik ) - α Ik = Áà Id = óQ Ul = %_ Xl = %k
_ üÔ "" %ÈUÑ6Ì 600 A È%_ 380 V Èe[ 50 HzÄ
SüX¬_<Ö 20 kV/400 V, 500 kVA Rk = 0.0032 Ω Lkm = 48.85 µH/Ì
ÚÖSz 50 m, 250 µH/km, Lkk = 12.5 µH/Ì
%k Xk = 2 * π * 50 Hz * (48.85 µH + 12.5 µH) = 0.019274 Ω
ÁÃ Ik = √2 * U / (2 * Xk) = 13941.33 A ukÔß'Èô| 400 A β-$ 165° XÄ
400 A óQ Id / Ik = 400 A / 13941.33 A = 0.0287
cos 165° = -0.966
cos (α - u) = cos α - Id / Ik = -0.9946
arc cos ( -0.9946) = 174° == > 7

CÊsÑ£Ä
DCS 500 C检 45
600 A óQ 600 A ÊàÖ Id / Ik = 0.043 cos 165° = -1.009 cos (α - u) = cos α - Id / Ik = -1.009
arc cos ( -1.009) = þÈâ == > á7, ù
DXN DXN â%ÁÃ_ä7¨ÈJ¬<qnnÄ
DXN X0üS!ü””%âä¨_ ¬β $àôäJ
Ìu9tZÄDXN XukVßÖ
2 * Xk * I CONV A
2 * U SUPPLY DXN (414) = * 1000
_D DXN (414) X 43 = 4.3 %. 6k: 1 = 0.1 %.
º¥¦_
L1 L2 L3t
U
output voltage
main voltage
firing angle
average voltage
0 30 60 90 120 150 180
α
Ò 22 º¥¦ 60° ÊXv_ ¼ã S!¬<ÏSÈ α $X×HOâ ABB @Ì#Ä

CÊsÑ£Ä
46 DCS 500 C检
H9XÕÛ ARM DIR (10402)ÃÛZH9X¹0Õ: 0 = ´È1 = 79(|)È-1 = ¡9(¥)Ä D U MOTN V (501), I MOTN A (502) U SUPPLY (507) X OÕßcÈoDübrX6kVvÄ
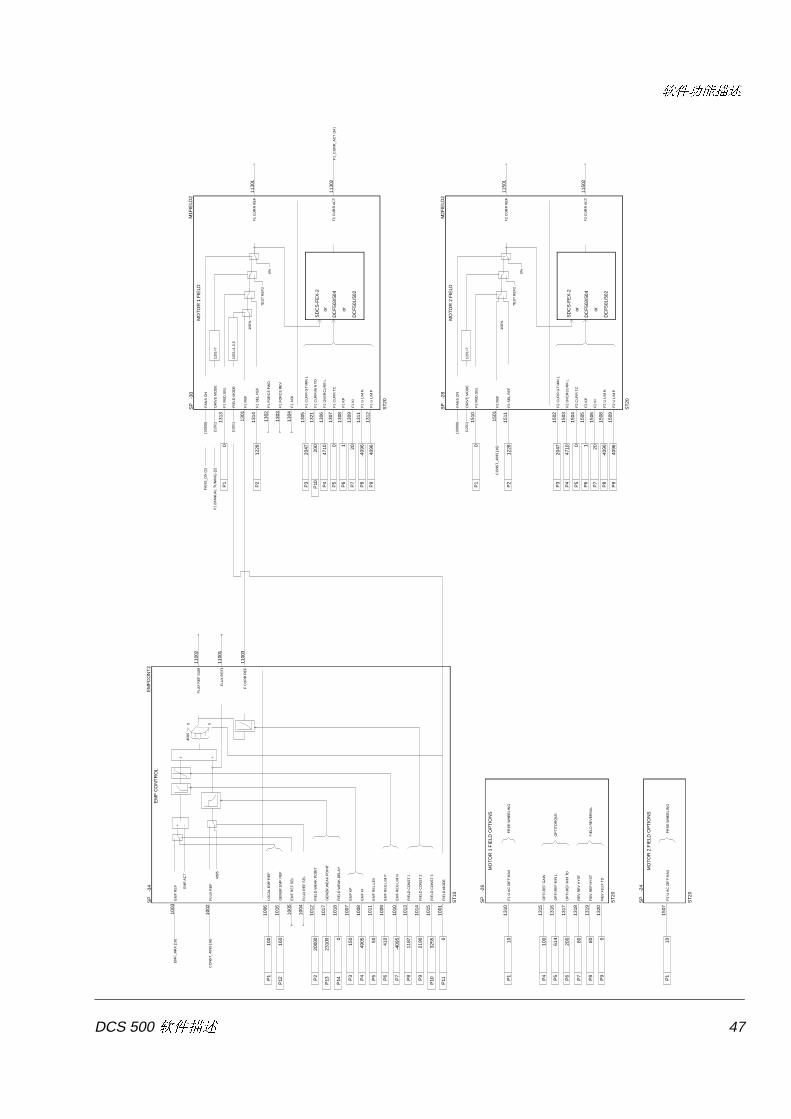
CÊsÑ£Ä
DCS 500 C检 47
F1
CU
RR
MIN
TD
P10
F1
U L
IM P
F1
U L
IM N
F1
KI
F1
KP
F1
CU
RR
TC
F1
OV
ER
CU
RR
L
P8
P7
P6
P5
P4
P9
ST2
0
F1
CU
RR
AC
T
F1
CU
RR
RE
F
F1
CU
RR
GT
MIN
L
TE
ST
RE
F2
F1
AC
K
F1
FO
RC
E R
EV
F1
FO
RC
E F
WD
F1
SE
L.R
EF
F1
RE
F
FIE
LD
MO
DE
F1
RE
D.S
EL
DR
IVE
MO
DE
FA
NS
ON
MO
TOR
1 F
IELD
100
1=1
,3,5
120
1=7
DC
F50
1/50
2
DC
F50
3/50
4
SD
CS
-FE
X-2
or or
0%
100
%
(109
08)
(120
1)
(100
1)
SP
P1
P2
P3
1301
1302
1303
1304
1130
2
1130
1
-30
M1F
IELD
2
1313
1314
1305
1306
1307
1308
1309
1311
1312
1321
0
1228
2047
4710 0 1 20
-409
6
409620
0
FIE
LD
WE
AK
DE
LA
Y
GE
NE
R.W
EA
K P
OIN
T
P14
P11
FIE
LD
MO
DE
P9
P10P
5
P6
P7
P8
P3
P4
EM
F K
P
EM
F K
I
EM
F R
EG
LIM
P
EM
F R
EG
LIM
N
EM
F R
EL
LE
V
FIE
LD
CO
NS
T 2
FIE
LD
CO
NS
T 1
FIE
LD
CO
NS
T 3
ST1
0
F C
UR
R R
EF
GE
NE
R.E
MF
RE
F
P13
P12
1004
1005
P2
FIE
LD
WE
AK
PO
INT
EM
F R
EF
SE
L
FL
UX
RE
F S
EL
1100
2
1100
1
1100
3
1003
1002
P1
SP EM
F R
EF
FL
UX
RE
F
EM
F A
CT
409
5
409
50 5
EM
F C
ON
TR
OL
FL
UX
RE
F S
UM
FL
UX
RE
F1
LO
CA
L E
MF
RE
F
-34
EM
FC
ON
T2
1006
1012
1007
1008
1011
1009
1010
1013
1014
1015
1001
1016
1017
1018
100
2000
0
150
4905 50 410
-409
5
1187
2190
3255 0
160
2310
0 0
F2
CU
RR
AC
T
F2
CU
RR
RE
F
F2
U L
IM P
F2
U L
IM N
F2
KI
F2
KP
F2
CU
RR
TC
F2
OV
ER
CU
RR
L
F2
CU
RR
GT
MIN
L
FA
NS
ON
TE
ST
RE
F2
F2
SE
L.R
EF
F2
RE
F
F2
RE
D.S
EL
DR
IVE
MO
DE
MO
TOR
2 F
IELD
120
1=7
1150
2
1150
1
1501
ST2
0
DC
F50
1/50
2
DC
F50
3/50
4
SD
CS
-FE
X-2
or or
0%
100
%
(109
08)
(120
1)
SP
P1
P2
P8
P7
P6
P5
P4
P3
P9
-28
M2F
IELD
2
1510
1511
1502
1503
1504
1505
1506
1508
1509
0
1228
2047
4710 0 1 20
-409
6
4096
FR
EE
WH
EE
LIN
G
MO
TOR
2 F
IELD
OP
TIO
NS
F2
U A
C D
IFF
MA
XP
1
ST2
0
SP
-24
1507
10
RE
V.F
LUX
TD
RE
V.R
EF
HY
ST
RE
V.R
EV
HY
ST
OP
TI.
RE
F M
IN T
D
OP
TI.
RE
F M
IN L
OP
TI.
RE
F G
AIN
MO
TOR
1 F
IELD
OP
TIO
NS
F1
U A
C D
IFF
MA
X
SP
ST2
0
FR
EE
WH
EE
LIN
G
FIE
LD
RE
VE
RS
AL
OP
TIT
OR
QU
E
P1
P4
P5
P6
P7
P8
P9
-26
1310
1315
1316
1317
1318
1319
1320
10 100
614
200 80 80 0
EM
F_
MA
X
16
CO
NS
T_
409
5 1
6
F1
_CU
RR
_A
CT
14
CO
NS
T_
409
5 1
6
P1
(MA
NU
AL
TU
NIN
G)
2
FA
NS
_ON
3

CÊsÑ£Ä
48 DCS 500 C检
• )
DCS 500B Ã BhüSü´¡áàX). ´¡Z´ ¡)XO_sÑ.
SDCS-FEX-2
DCS 500 Converter
SDCS-FEX-1
M O TO R
M
E X TE R N A LF IELD
E XC ITER
A ckn o w led g efie ld exc i ter
R S -4 8 5
Fie ld m onitoring
X 14
X 1 4
X14
R S -4 8 5
Control
CONTROL BOARDS C D S -C O N -xI/O -
ca rds
X 16
F IE LD
-flux control, field reference-field logic-EMF-control
DCF50x-0050
Control
Field reference
SDCS-FEX-3x
Ò 23 )XμÚ

CÊsÑ£Ä
DCS 500 C检 49
)Xݽ )XO_îD FEXC SEL (505)ݽ 0 [NO FIELD EXCITER] þݽ) 1 [DIODE FIELD EXCT] YB`Uu) SDCS-FEX-1 2 [FEX2 OR FEX3] YB SDCS-FEX-2 êêB SDCS-FEX-3 3 [FEX3 FOR MOTOR2] 2XêB) DCF50x-0050 4 [FEX2/3 + MOT2=FEX3] YB SDCS-FEX-2 êêB DCF50x-0050 0) 1 êB DCF50x-0050 (FEX3) 0) 2 5 [FIELD ACK VIA DI] JW, î DI·h( 6 [FIELD ACK VIA AI] JW, î AI·h(
)XÕ )XÕÃîÈxsÑ FEXC STATUS (11203)³.
FEXC STATUS (11203) ! Y¼áÄ Èâ 0 FEXC1_RDY_OPER 0 = ¤ þÛQ (AC _ö) 1 FEXC1_ OK 0 = fex 1¾ùêdp 2 FEXC_2 RDY_OPER 0 = ¤ þÛQ (AC _ö) 3 FEXC2_OK 0 = fex 2¾ùêdp 4 ACK_FEXC1_ON 1 = 1 7 5 ACK_FEXC2_ON 1 = 2 7 6 FIELD_HEAT_ON 1 = tÁsÑ 7 FIELD1_REV_ACK å 0 = 7å, 1 = ¡å 8 ACK_CSC_ON 1 = îNcy ONQ¸ 9 ACK_FEXC_ON 1 = 7
ݽ´h( Vp FEXC SEL (505) = 0Èíh(µËuÝãÄÖüb
©Ä) 1`) 2üb "Ú!¤ " sÑÄ
YB`Uu) SDCS-FEX-1
Sü FEX1ÊÈÃî×H¬_<XgÎ_9×HÄCÊY¼á£È¾Î¥Ý´XµËÄà
áaÔUBJWDÄh(µË´©ÈyÏÎÈVpµË TC _RDY _ RUN (11204)X 2!ü ONQ¸âX 6¦¹Y¡» 0Èíô|î´´h((NO FIELD ACK) pàÇÌÄ
YB) SDCS-FEX-2
YB) FEX2 )Ì9Èù)å(7å)Ä B9XMûÈyº<ÁÜâîÝ\ãX (5...10%) 9Ä SDCS-FEX-2 î îÒXÄFEX2 £Jî î^£Õô|Ä

CÊsÑ£Ä
50 DCS 500 C检
h( £Xübóh(µËÄVpYU
$Èô|îy FIELD EX 1 OVERCURR pÇÌÄ"XîÕÕ×V<ÈàÕÕÕÕÁ 6 ¦sâÈô|î´´h(pàÇÌÄ
êB) DCF503-0050
¢X¦zß DCF503-0050 â SDCS-FEX-2 ÌÄáàØüb DCF503-0050 Xûb SDCS-FEX-2ÈàèJÌ3ûÄS_Ë SDCS-FEX-32Ä
êB) DCF504-0050
êB) DCF504-0050 Ã7óøþåXÄ nXúËnåÄ7Ë< "79"¹0ÈóË< "¡9"¹0ÄX¥eâ SDCS-FEX-2 ÌàÄS_Ë SDCS-FEX-31Ä
î AI/DI ²yX )
¯ ÝÛX ôÊÈ£ÔU±-sÝX)ÄÊ
O SüD+g9êõ³g9óXh(µË9¥sÑÄ
'üD+g9óh(µËÊÈJsÑâSü FEX1 ÊÌàÄ
h(ݽ h(µËXݽâݽ)O_XDÌàÈh(µË²y
g9 [F1 ACK] (1304) FEXC SEL (505) ... 5 = [FIELD ACK VIA DI] î DI h( 6 = [FIELD ACK VIA AI] î AI h(
õ³g9î'X
Sü ü£êÊÈUSüõ³g9÷Ä'Sü AI(õ³î'))ÊÈÔUÚnôg)ÄùîÚÔþõ³g9î'âµË F1 CURR REF (11301)²y9rÄSüXõ³gÎO¯ 6kÈS 4096 Íhqn0_nÄXrµË3U6kÈSg9 4096 ÍhqnÄ

CÊsÑ£Ä
DCS 500 C检 51
uk_ _VÈqn 32.5AÈ Íhr£ 7VȲyXõ³g9 AI3Ä B: CONV MODE (110) = 1 HIGH VALUE (111) 4096*10V/7V = 5851 LOW VALUE (112) -4096*10V/7V = -5851 I MOT1 FIELDN A (503) = 3250
ÝGV)6k AI/AO XºµCÈD+âõ³ I/O Ô´Ä
àÊSüøþ) 'ÔĬ<øÄ. "Ú!¤ "ÊÈv)îÔþM^Xyº<üøÄÈÛ6ÈøÄÑÝؾX)Ä
ü`^X)Ä0 “Ô) " à`ÄXÄ0 " `) "Ä
¾Ý "Ô)" ï ÈJnî EMF CONTROL sÑ+ÎÄ"`)" î¹Înêõ³g9êÌsÑóXì¤ Ä îå)î¹\ãXnÈùÍþ¤ X¯ -
6tÁÄ
XB qnOg9ßcȹk7BXÄÔû
`ÔãîáÔ ¬Ä )Xqnî¹ßDB I MOT1 FIELDN A (503) 100 = 1 A I MOT2 FIELDN A (504) 100 = 1 A
ÔãB F1 CURR GT MIN L (1305) 4095 = qn F2 CURR GT MIN L (1502) 2047 = 50% qn hüÊÈO¹ÔãXûãÄnXDO
ãbrüXÔãÄ DB F1 OVERCURR L (1306) 4095 = qn F2 OVERCURR L (1503) 4710 = 115% qn

CÊsÑ£Ä
52 DCS 500 C检
ÁsÑ êBX DCF50x-0050 KÝÁsÑÄVpxg9_b¤¡s´U\ÈVyº<ÔÈÊ DCF50x-0050 ѤoÔ5îÃÈ¢à\8ZS_¿ó¬X_Ä
ÁsÑX º¥B
xg9_«¥XÄVpJ¬êþ¿È)íîÕÁ
º¥ø¾JÌuȱÕÔîȹ¤oXîÃÄÔ¥óÁ
0üÊXI#zÃîßëD×VÄ F1 U AC DIFF MAX (1310) F2 U AC DIFF MAX (1507)
6k)! % 1 = 1%. ñ 10 %ÈG)²Áøõx_X£ÌÂûb 10% ÊÈÁsÑÄ
rX¸¶ )ÝÔþ¸¶<Èübr£X¸¶Ä¹¸¶
<áE¡ PI ×V<ȾڣXµËôgô|XCÊĸ¶ÊÈDáhkûÈ´¹µË¬übXÔã`
X¥Ä F1 CURR TC (1307) (6k 1 = 0.01 s) F2 CURR TC (1504)
×V< )X×V<ü)Y¼ÄVp×V<ÔU|× VÈÔoDÃî î¯ ,ªÄ×V< PI ×V<ÈÝ P-¨_rD` I-ÃÚÊÈDÄ
P-rÖ F1 KP (1308) F2 KP (1505) 6k: g9 4095 P 1 gÎ 4095

CÊsÑ£Ä
DCS 500 C检 53
I-ÊÈDÖ
F1 KI (1309) 6k: 1 = 10 ms F2 KI (1506) 6k: 1 = 10 ms PI ×V<XÔûgÎÃîøþD$. JÌu9<ÔîÊ gÎ_ 0.9 * VACÈ b$ 4095. ´$ûXȹ 2048 = 0.5 * 0.9 * VACÄ
F1 U LIM N (1311) ó$ F1 U LIM P (1312) 7$ F2 U LIM N (1508) ó$ F2 U LIM P (1509) 7$
¡å Vpô|¾ÝÔvJÌu9(25$)ÈÔUS¡å¤@ÊÈÔU¡åÈ Ã¹ ¬ózåÈ3ùîÄaóÅãÚÑ£¨²%Ä v@½nXúËnZåÄ
M
F1
F2
Iexc.+
-
T +
-
EM F
n
Id
3 -p h asesup ply G
F 1
F 2+
- T
+
-EMF
n
Id
Ie xc .
N orm a l ru n n in g as m o to r F ie ld R e ve rsa l B rak ing
Ò 24 ¡å|sÚ
îD FIELD MODE (1001) ¡åsÑ 0 [CONSTANT F] ´ EMF- 1 [EMF, NO FIELD REV] áú¡åX EMF- 2 [NO EMF, FIELD REV] ¡å 3 [EMF + FIELD REV] ¡å+ EMF- 4 [NO EMF, OPTITORQUE] ¡å+ @½ìê 5 [EMF + OPTITORQUE] ¡å+ @½ìê+ EMF-
üáÔUóX¯5$ô|Èn7X 100% (4095)ÄVpÔUóÈè EMF-È í¬ÃÈWáÑûb 100%XqnÄ

CÊsÑ£Ä
54 DCS 500 C检
å ¬²â '@½ny¥ÊÊÈ6¡åsÑþI#ÈÔUÔþD üÊ@½n¥óÔþ²Ä ¹²¹ÊÍÄÄ _VȲ 80È'@½n-80 êÈãÊÈô|î¯ ¡åÈ @½n+80êÈûÊÈ7åÄ REV.REF HYST (1319) (Õ 80)
å îÍÄ1302ÅêÄ1303ÅXݽÈùÎnåȹS¤ üÛnåÞÈ ¡Q¸ãù!"ô|Í@½nXI#zÄøþg9µËübnåÖ [F1 FORCE FWD] (1302) [F2 FORCE REV] (1303)
¬åÊX¥
îßâJÔã$Ì¨È ¹ãb8$È ÝsÑÑÕÕÈô|Õ¬ RDY RUN = 0 è RDY REF = 0ÄàÔUî ¡åS¡@ÊÈ áàZÈ ´O£ÊÈ ¹hüÔnÊÈY"bÔã$Ä
6åßÈ ×V<`óz×V<XÃÚ¼ÚÑÕÕÈózÃÚgÎÝrózÈÄ .
Oü 2 ¦Y ¬åÈ úíµË ACK_FEXC1_ON 0 è RDYRUN ` RDYREF B 0Ä ßëDüb¥sÑÖ
F1 CURR GT MIN L (1305) nÔã REV.REV HYST (1318) @½nXúËnåÄr ån`rX¨WBnIJübó
¡åh(µËÊXr£Ä
REV.FLUX TD (1320) VpXîuÝ¿ó³cX¬ êÈ VÍb2»XÈÈüBnåÊÈÔUtÊÊÄ î¹ÊÈ 0Ä ßëµËüb×V<âÔo£Ö TC_STATUS (11204) X 5!Û TC_FIELD_CHANGE, ü6åóÈȹµËÕÕv×V<Èóz×V<XÃÚ¼ÚJÚ
ózÃÚgÎÈ£ózÄ
@½ìê b©XóWûÈ´86åXÊÈ\SÄîSü@ ½ìêsÑÈ ü¤oßùýÁ¹ÊÈÄ

CÊsÑ£Ä
DCS 500 C检 55
Sp e ed
Current
Fie ld Current
Spee d
Current
F ie ld Current
F ie ld R eversalw ith OP TIT OR QU E-function
N orma l F ield Reversa l
Ò 25 @½ìêsÑâî6åX¨W
Vpü6åóÈȹNßÔUÔþãX@½È_V ¬ó
zåÈùü6å|0!£ãÄ
¹TÃrX¿ó6åÄ´£îåªb8
ÊX@½nÈVózå ¬X26ÈWÔUX@½3\ãÈ
bXùÝÔU!"Ä
@½ìêXݽ
@½ìêÃD FIELD MODE (1001)Ý½Ö 4 [NO EMF, OPTITORQUE] ÃÚ + @½ìê 5 [EMF + OPTITORQUE] ÃÚ + @½ìê+ EMF
î@½n !"
@½nânÈXGÏD OPTI.REF GAIN (1315) Bn (×È 0...10000). OPTI.REF GAIN * @½n F1 CURR REF (11301) = 98
¹ 100 ÊÈ<Èy7¨b@½nĹU 10% @½nóµÈOPTI.REF GAIN (1315) U 1000Ä
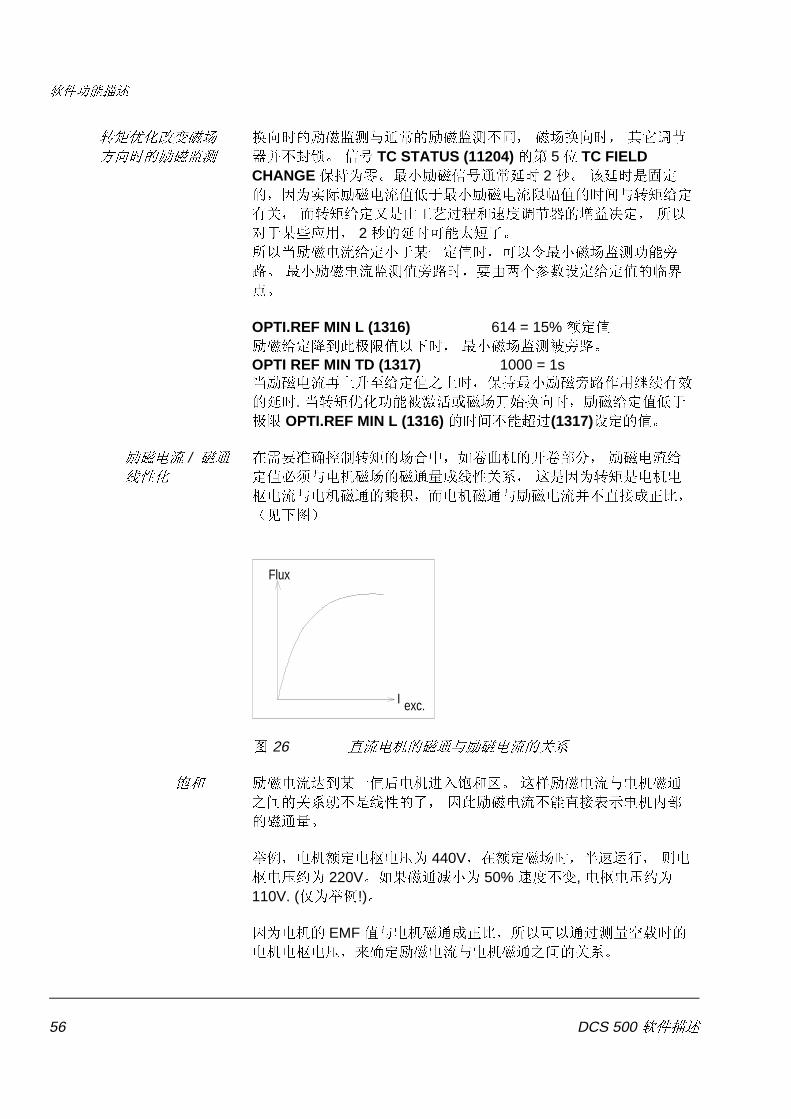
CÊsÑ£Ä
56 DCS 500 C检
@½ìê ¬ åÊX¥
6åÊX¥âîX¥áàÈ 6åÊÈ JW×V<JáÕÕÄ µË TC STATUS (11204) X 5! TC FIELD CHANGE ±ÕÊÄÔãµËîÊÊ 2¦Ä ¹ÊÊÎnXÈ´r"bÔã$XÊÈâ@½n
ÝGÈ à@½n¹Nß`óz×V<XrnÈ ¹Íb¤ohüÈ 2¦XÊÊÃÑþÁZÄ
¹'nãb¤ÔnÊÈù¸Ôã¥sÑ
ÃÄ Ôã¥ÃÊÈUøþDnnX Ä OPTI.REF MIN L (1316) 614 = 15% qn n!8U$¹ßÊÈ Ôã¥ÃÄ
OPTI REF MIN TD (1317) 1000 = 1s 'aÞÇnÞÊȱÕÔãÃ0ü»ÁÝ
XÊÊ. '@½ìêsÑêÔ6åÊÈn"bU$ OPTI.REF MIN L (1316) XÊÈáÑY(1317)nXÄ
/ îûê
üÔUB@½XÜÈVKÆXÔK¼ÚÈ nOâXî£äûGÏÈ ´@½vâîX,ÃÈàîâJáÈyä7¨È
ÄßÒÅ
Flux
I exc.
Ò 26 ÈXîâXGÏ
E` ¤Ôâ¯9E`Ä âîÈXGÏáûXZÈ ´8áÑÈy<Y¼ Xî£Ä
_Èqnv_ 440VÈüqnÊÈó¤ È ív_z 220VÄVpî£ã 50% ózá¬, v_z110V. (_!)Ä
´X EMFâîä7¨È¹Ã¹î£NQÊXv_È9BnâîÈXGÏÄ

CÊsÑ£Ä
DCS 500 C检 57
ûêXUñÃÈRÎü¤ÔózÊÈóÔ EMF_XÄ ûêîÔþsÑ+rXÈÝÝþÈ Íh90%È70% ` 40% îÊXÄJWÃkÄ ×©ßÈ USü EMF×V<ÈOÍsÑ+Xo¯ nÄ ¾Ý EMF×V<SüûêsÑÄ
ûêß
` ¡0ÛÐ
-6棋
S!üᤠÊÁÈÔUü-6Ê£ãJĹ
sÑîßëøþDÖ F1 RED SEL (1313) ݽ 1 F2 RED SEL (1510) üÚ!¤ ݽ 2
SüXnÃîßëøþDÝ½Ö F1 RED REF (1314) 1Xn F2 RED REF (1511) Ú!¤ Ê 2Xn
ßëʹsÑ
- "ON"-Q¸"1", Gyº<ÁÜ - ô|Û¤ (RDY RUN)Õ. - ÆZ 10 ¦.
"OFF"ÕÊX tÁ
6üOFFÕʧð, ÝÔþãX. Ãî¹ßD¹sÑÖ
FIELD HEAT SEL (914) SüXnâ-6Ê£ãXsÑÌàÖ

CÊsÑ£Ä
58 DCS 500 C检
F1 RED REF (1314) 1Xn F2 RED REF (1511) Ú!¤ Ê 2Xn. ONQ¸ 0 ÊÈ ¹sÑÈ Gyº<ÔĹsÑÁÜyº<Ä
EMF (EMF_CONTROL) sÑ+
Field Weakening PointSpeed
U armature
Excitation
UI exc.
Ò 27 âózXGÏ
EMF×V<Xüè EMF×V<ÝøþUsÑÖ 1. üÎó¹Þ¤ ÊÈEMF×V<î¾|ÝÔU£ãX
ȹS EMF&ÔûÄ Ã¹S!v_ȺÔ6ÔûX EMF3ѱÕîÃÑûÄ
2. 'ÔUSüBX@½×VÊ, EMF×V<ÑBî
£Ä

CÊsÑ£Ä
DCS 500 C检 59
EMFXݽ
EMF sѹßD FIELD MODE (1001) 0 2 EMF(&n), áÃÚ 1 EMF áÃÚ 2 2 EMF(&n), ÃÚ 3 EMF ÃÚ 4 @½ìê, ´ EMF 5 @½ìê, ú EMF
ÃÚîübø5$ô|Ä)XOÃÈV SDCS-FEX-2ÈDCF50x-0050 ê DCF500/DCF700Ä
ûâóû_!
rBÈOuk EMFÄNQÊ£XÈ_â EMF ÎÌÈúQÊÈEMF îbXóQ3ëàÝ£ãÄEMFXuk@ãVßÖ EMF = Udc - ( RA * i + LA * di/dt ) J RA = v, û LA = vó, ¿| i = v Udc = £Xv_ ºµC óz£ Ô´
ü¤Ô@óÞJîO£åȹS!v_ȹ³Ä ""ÄÔ£ãÊXóz¿. ""ÄüÞÈîÝ 1/nX¨[£ãÄßëøþDüb`ä¹sÑÖ
Speed2nn N N
Flux
100%
50%
Ò 28 îâózXGÏ

CÊsÑ£Ä
60 DCS 500 C检
SPEED SCALING (2103) ô|XÔûózÈ)! 0.1 rpm. ¹Íhózn 20000Ä FIELD WEAK POINT (1012) ÈÝóz)!6kÄ _. Á 1500 - 1800 rpm, 440V B SPEED SCALING (2103) = 18000 B FIELD WEAK POINT (1012) = 16666 (=1500 * 20000 / 1800 )
înXØÚ
înîg9[FLUX REF SEL] (1004) ݽÖg9[FLUX REF SEL] (1004) 0È<ݽ&n 100% în(= 4096 CÊY¼)È 1 <îg9[FLUX REF] (1002)ݽînÈ'¹NßÝM^UÊȹg9âhüßc̲ (î DCS 500BXsÑ+)Ä î£ãÊÈÔUÈûXvȹüHÞóÌàX@
½Ä¡hüÈVKÆXÔK¼ÚÄbvÈûȹ£ Ú|[ȬÈÝýb¬zã@½Ä îînáî¿ó¬êÄVÈÔKXîc^&XÈX
¬êÄ
ù0ÊXîn îX×È 1:5ȹÔãînqnX 20% Äù0Ê£åXîn¬BnXÔûînÄ
EMFnXØÚ
EMFng9[EMF REF SEL] (1005) Ý½Ä 1ÊÈݽ9¾g9[EMF REF] (1003 ) X EMFnȹg9âhüßcÌ²Ä 0 ÊݽD LOCAL EMF REF (1006) 0 EMFnÄ
LOCAL EMF REF (1006) X6kÖ 100% = U MOTN V
PI ×V<
PI ×V<übõ7ÁßXÃÂÈVx%_X¶|ÄôäXx<gÎ_X¶|Ä b@$X IR XE¡îóíÃX EMF£§pȹ EMF×V<XÃÚ¼ÚÔ¡B"b¤Ô EMFÃÚ¼ÚÊX$ȹßDnÖ
EMF REL LEV (1011) Õ 50 (100 * 50/3786 = 1.3%)

CÊsÑ£Ä
DCS 500 C检 61
EMF-ø¶<
EMF rÃîÔ¸¶<¸¶Ä¸¶<XÊÈD¹ßD n EMF FILT TC (513) 6k 1000 = 1s (0...10000)
PI –rX6k
±Õßr&nÈ×V<X¨_rü¹ÞÝ 1/n £åĹrùßD×H EMF KP (1007) 6kY¼ 277 = 100 % (1...999)
ÃÚÊÈDuÝ 1/n 6k´$ÈWÀb¨_rXÄÊÈD= 147200 / EMF KIÈü¹ßD×H EMF KI (1008) 6kY¼ 20000 = 7.4 ms
PI×V<X gÎ$
PI×V<XgΫ$È100% XnÍhînXÔû±ÍÄPI×V<XgÎGÈüBX$nÊÄü¹ÞÈr$ÔrSÈG¥õÄ PI×V<X$¹ßD×H EMF REG LIM P (1009) 4095 = qnî +410 = Õ (+10%) EMF REG LIM N (1010) -4095 = -qnî= Õ

CÊsÑ£Ä
62 DCS 500 C检
CO
NV
ER
TE
R P
RO
TE
CTI
ON
EA
RT
H.F
LT D
LY
EA
RT
H.F
LT L
EV
EA
RT
H.C
UR
R S
EL
AR
M O
VE
RV
OL
T L
EV
AR
M O
VE
RC
UR
R L
EV
U N
ET
MIN
1
U N
ET
MIN
2
PW
R D
OW
N T
IME
CO
NV
TE
MP
DE
LAY
P9
P8
ST2
0
SP
P1
P2
P3
P4
P5
P6
P7
-76
CO
NP
RO
T2
511
512
508
509
510
514
515
516
527
110
230 80 60
5000 0 4 10 0
MO
T2
CA
LC T
EM
P
MO
T2
ME
AS
TE
MP
MO
TOR
2 P
RO
TE
CT
ION
MO
DE
L2
.TR
IP L
MO
DE
L2
.ALA
RM
L
MO
T2
.TE
MP
FA
ULT
L
MO
T2
.TE
MP
AL
AR
M L
MO
T2
.TE
MP
IN
P7
P6
P5
P4
P3
P1
P2
1160
1
1160
2
1601
ST2
0
SP M
OD
EL
2.S
EL
MO
DE
L2
.CU
RR
MO
DE
L2
.TC
-21
M2P
RO
T_2
1602
1603
1604
1605
1606
1607
1608
0 0 0
4096 12
0
130
240
MO
TOR
1 P
RO
TE
CT
ION
MO
T1
CA
LC T
EM
P
MO
T1
ME
AS
TE
MP
MO
T1
.TE
MP
IN14
01
MO
DE
L1
.TR
IP L
MO
DE
L1
.ALA
RM
L
KLI
XO
N I
N
MO
T1
.TE
MP
FA
ULT
L
MO
T1
.TE
MP
AL
AR
M L
P2
P1
1140
1
P7
P6
P5
P4
P3
1140
2
ST2
0
SP M
OD
EL
1.S
EL
MO
DE
L1
.CU
RR
MO
DE
L1
.TC
1404
-22
M1P
RO
T_2
1402
1403
1405
1406
1407
1408
1409
0 0 0
4096 12
0
130
240
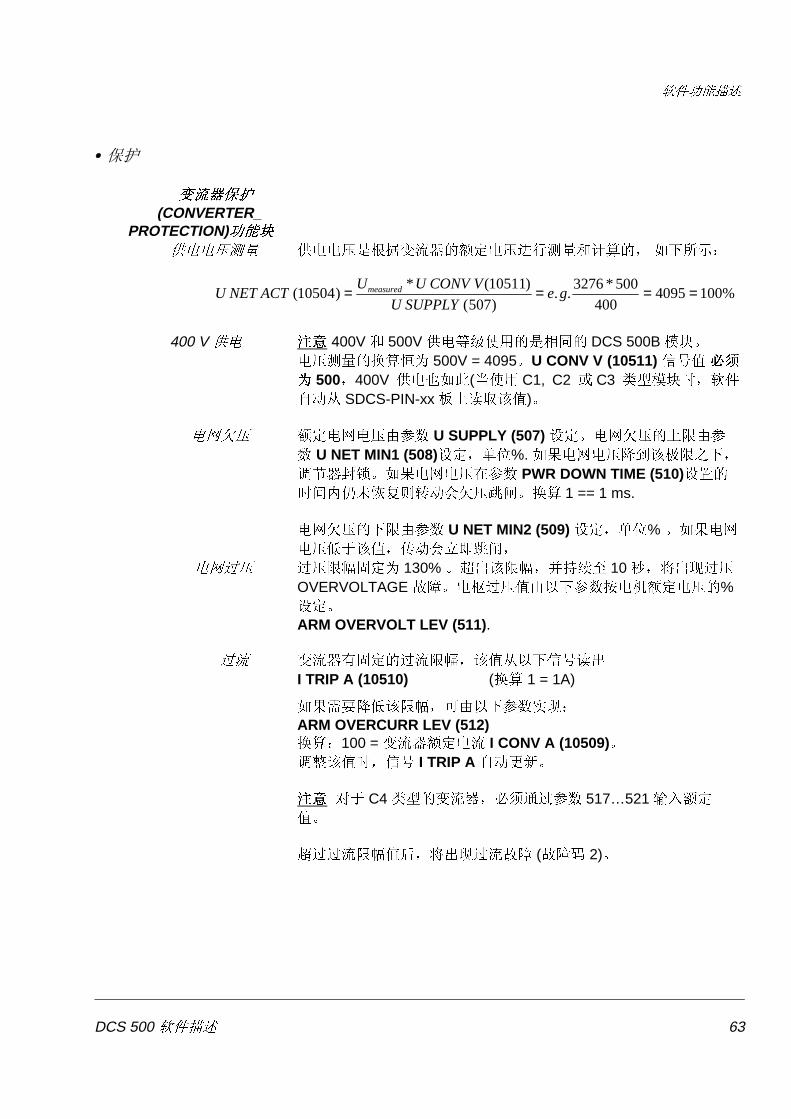
CÊsÑ£Ä
DCS 500 C检 63
• ±x
¬<±x
(CONVERTER_ PROTECTION)sÑ+
o_£ o_ B¬<Xqn_¯ £`ukXÈ VßÖ
U NET ACTU U CONV V
U SUPPLYe gmeasured
( )
* ( )
( ). .
*%10504
10511
5073276 500
4004095 100= = = =
400 V o ¼ã 400V ` 500VoSüXÌàX DCS 500Bõ+Ä
_£X6k& 500V = 4095ÄU CONV V (10511) µË O 500È400V o3V8('Sü C1, C2 ê C3 O_õ+ÊÈCʾ|¢ SDCS-PIN-xx SÞϪ¹)Ä
%ô_ qn%_D U SUPPLY (507) nÄ%ô_XÞ$D U NET MIN1 (508)nÈ)!%. Vp%_!¹U$ßÈ×V<ÕÕÄVp%_üD PWR DOWN TIME (510)BXÊÈY¡þ6áí@|îô_ÇÌÄ6k 1 == 1 ms.
%ô_Xß$D U NET MIN2 (509) nÈ)!% ÄVp%_"b¹Èô|îGÇÌÈ
%_
_$În 130% ÄYι$ÈJÕÁÇ 10¦ÈÚÎ_ OVERVOLTAGE pÄv_¹ßDÝqn_X% nÄ
ARM OVERVOLT LEV (511) .
¬<ÝÎnX$ȹ¢¹ßµËÏÎ I TRIP A (10510) (6k 1 = 1A)
VpÔU!"¹$ÈùßDrÖ ARM OVERCURR LEV (512) 6kÖ100 = ¬<qn I CONV A (10509)Ä
×H¹ÊÈµË I TRIP A ¾|ÈÄ ¼ã Íb C4 O_X¬<ÈOîD 517…521g9qnÄ Y$âÈÚÎp (pÕ 2)Ä

CÊsÑ£Ä
64 DCS 500 C检
Á
Ã9XÔ¬ýzâµË MAX BR TEMP (10512)ÏÎÈ6k: 1 = 1°C YÎ8$ÊÈîά<Á (CONVERTER OVERTEMP) pÄy:¨ÇÌ" 10°C. Ã9XrýzµË BRIDGE TEMP (10507)ÎÈ(6k 1 = 1°C).Íb C4O_X¬<ÈÃ9XÔ¬ýzOîD 519g9Ä
yp yp BoXfó<X`9øÄVpuÝy
ÈÝÌ`ÊÄ
M
AD
SUPPLY
Delay
t 0COMP
EARTH.FLT LEV
EARTH.CUR SEL
Earthfault
I1 > I2
EARTH.FLT DLY
Ò 29 y£sÚ
yp±x¹ßD EARTH.CUR SEL (514) . 0 = áSü 1 = Sü ypÇ̹ßDn EARTH.FLT LEV (515) . (6k)! ]Í) pÊÊÊȹßDn EARTH.FLT DLY (516) . (6k 0.001s)

CÊsÑ£Ä
DCS 500 C检 65
1±x(MOTOR_1_PROTECTION)sÑ+ ` 2±x (MOTOR_2_PROTECTION)sÑ+
£Xýz ýzX£îî DCS500B Xõ³g9· AI2 ` AI3 ¯ XÄýz£ÙÀ 1Ö[TEMP IN] (1401) ` 2Ö[TEMP IN] (1601) î'Xy:âÇÌ$Äoî'ÃübÍøÄýêÍÔÄJHS¯ ýz£Ä
VpSüýz£ÊÈýzùãz (PT100)êû(PTC)Ä3ùSüê¼ýz£¾<ÈÚ<ýzX(mA)ê_Õõ³g9·<ýzµCÄ
£Ý½ 'Sü PT100, PTC êJW£Ê£ýzÊÈOݽÜÖ X£ãÄSü PT100 ÊÊÈíÎؾcË(1...3)Ä AI2` AI3sÑ+XD AIx CONV MODE (xxx)Ä Sü PTC £ÊÈ@6§pÝ6kÄ
üØ¡ßÈg9ô|SX_×ÈâSÞXdXÇÑ
O7BBÄSDCS-IOB3 SÞ¾ÝÔþd×VpUSüøÃýz£Èíø5î'XÊO(Ä MOT1.[TEMP IN] (1401) 1Xýz£g9. MOT2.[TEMP IN] (1601) 2Xýz£g9.
X3:
UPT100 PT100
5678
AI2
X4:
11
AI3
10
5m A
A/D
A/D
S D C S _IO B -3
Ò 30 øþ PT100ôó<SüEàXd
`´ "Û@Ê£Ä"ÝGg9×È`&n¥ó<X ÇB. 3ô"õ³g9"¼Ú.

CÊsÑ£Ä
66 DCS 500 C检
y:âÇÌU$
ýz£(PT100, PTC) Xy:âÇÌU$ÑÝÌhXDÄVpýz£y:DBXÊȬ<¥Îy:ÛÈMOTOR 1 TEMP. ALARM / MOTOR 2 TEMP. ALARMÄ
Vpýz»ÁÞÇÌU$, íCÊîSô|ÇÌÈJÎpÛ MOTOR 1 OVERTEMP. / MOTOR 2 OVERTEMP. Áp2b 2ÇÌÈG¥óÁÊyº<`yº<ÔÈà¢ÕÁ¤ Èýz!y:¹ßÄ
ü PT100 £ÊXy:âÇÌDÈy¹ãz)!BÄüüÁ(PTC) £ÊÈÌhXÈ(0...4000 ohms). y:BüßëDÖ
1: MOT1.TEMP ALARM L (1402) 2: MOT2 TEMP ALARM L (1602) ýzÇÌXB: 1: MOT1.TEMP FAULT L (1403) 2: MOT2 TEMP FAULT L (1603)
VpÞÄDÊÈy:âÇÌá«¥Ä
_Ö õ³g9î' 2 (AI2) üb PT100-©X£(3 þÊ)Èõ³g9î' 3 (AI3) üb PT100-HSX£(2 þÊ)Ä©Xy:âÇÌÚÿ 110°C ` 120°C ÄHSXy:âÇÌÚÿ 40°C ` 50°C Ä8ÊXBVßÖ AI2 CONV MODE (107) = 5 AI3 CONV MODE (110) = 4 MOT1.[TEMP IN] (1401) = 10107 (²ygÎ AI2: 10107) MOT1.TEMP ALARM L (1402) = 110 MOT1.TEMP FAULT L (1403) = 120 MOT2.[TEMP IN] (1601) = 10110 (²ygÎ AI3: 10110) MOT2.TEMP ALARM L (1602) = 40 MOT2.TEMP FAULT L (1603) = 50
¼ã: ' AI gι°C êΩ)!ÊÈAI sÑ+X HIGH VALUE â LOW VALUEDÑþSüÄ SDCS-IOB3 SÞXÇBSøþî'Xg9_×È +/-10VÄ

CÊsÑ£Ä
DCS 500 C检 67
îÔG¯ ±x
ÈXýz±x3ùîXýzÔG¯ ¥ÄÔGü ÔnýzÊÔÄîD+g9âCÊY¼²yÈCÊüg9µ Ë[KLIXON IN](1404)Ä'g9Õ 1 ¬ 0 ÊÈÁÇÌÄ
[TEMP IN]
TEM P ALARM L
1 4 0 1
1402C:
TEM P FAULT L1 4 0 3
C:
M O T O R 1 P R O T E C T IO N
M OD EL1.C URR1 4 0 6
C:
M O DEL1.ALARM L1407
C:
M O DEL1.TRIP L1 4 0 8
C:
M ODEL1.TC1 4 0 9
C:
T 20
S P
M O T1 CALC TEM P11402
[KLIXO N IN]1 4 0 4
M O D E L1 .S E L1 4 0 5
C:
O 1D Ixx
O 2
107xx
107xx
T 20
S WH W
S DC S-IOx-x
M
Ò 31 îÁÔGXÁ±x.
XÁõ_ ÈOÝÁ±xÄVp´©Èy£XýzÈí'ô| X$BûbqnÊÈÃSüô|Y¼XXÁõ
_Ä DCS500B ÝøþÁõ_ÃàÊSüÄîg9µË[MOTOR2] (913) £Xv¯9ÜÖXõ_Ä
Q ac t
tim e
A
BC
D
E
F
H
Accel. Constan t speed Dece l. S tandstill Accel.
100% Motor's therma l capacity
Q k
Ò 32 Qact âáàóQXGÏ

CÊsÑ£Ä
68 DCS 500 C检
ÞÒ<Î QACT (ÁóK) ýzÆXÞâß!¼ÚäÄüÆX 0-A-C-D Èü D îbÁXÊÈDàÎQÇÌÈGStÁâuÝâÁ£ÍhXU$ QACT = 100% Ä´|ȹü A tóáîSô|ÇÌ üÆX0-B-C-E-F-H È´ÊÈDóSÈÔXóQ<óùÝÔU¡áîõÄ
Xý¹ÊÈD<ÈâXGä7¨Ä Iact2 Qact = * ( 1 - e -t/τ ) * 100 (1) Iref2
JÖ Qact ÁóK Iact r
Iref n, îXqn τ ýzÊÈD 100 6k´$ t ÊÈ
HÊÈýõ_ݹß@ã¬ê Iact 2 Qact = * e -t/τ ) * 100 (2) Iref2 7V@ã(1) `(2) ÈÁõ_SüÌàXÊÈD¯ tÁ` HÄ
XtQ @ã 1 ` 2 uÝ×%r¬bqnÊXXtQXÄüõ_îôäÇÌÄ XtQ I0.
Iact2 - I02 Qact = * ( 1 - e -t/τ ) * 100 (3) Iref2 - I02
Áõ_Xݽ
Áõ_D MODEL1.SEL (1405) ` MODEL2.SEL (1605)ÄVpuÝÁõ_(0)ÈíJgÎÊÄ

CÊsÑ£Ä
DCS 500 C检 69
g9µË[MOTOR2] (913) ݽ³cv£XÁõ_Ä [MOTOR2] (913) 0 = MODEL 1 ³cv£ 1 = MODEL 2 ³cv£ ´8ÔþÁõ_³cv¬êȺÔþÁõ_HÄ
y:$âÇÌ$
y:âÇÌ$XukÝßëDX0Î (Iref) MODEL1.CURR (1406) MODEL2.CURR (1605)
7 4096 (≅ qn)ÄîáU ¬¹ÄVpb¤os´ÈVWHáQÈS´©Ýqn²Á¤ ÈíU!
"¹ÄVÔX²ÁóQqnX 85% ÊȹD 0.85 * 4096 = 3481.
y:âÇÌU$î¹ß¯þDݽ
MODEL1.ALARM L (1407) MODEL1.TRIP L (1408) MODEL2.ALARM L (1506) MODEL2.TRIP L (1507)
¤¬QÑoÃݽñÄ_VÈy:!O²Á √120 * 100 = 109.5 %ÈÇÌ √130 * 100 = 114 %. |$y: 90...100%ÈÇÌ 106...110%.
MODELx.ALARM L (xxxx) = (y: %2/100) MODELx.TRIP L (xxxx) = (ÇÌ %2/100) _. ÇÌU$ 106% --> MODELx.TRIP L (xxxx) = 112
Áõ_ÊÈD Áõ_XÊÈD¹ßDn MODEL1.TC (1409) MODEL2.TC (1608)

CÊsÑ£Ä
70 DCS 500 C检
ÔU¼ãXüukÇÌÊÈÊáÑÈySüÁõ_XÊÈDÄî
ôî¤oÆÈ¹Æ BÔnXQÏDBn
XQÊÈÄD MODEL1.TC (1409) ` MODEL2.TC (1608) îßÒݽÄ
0.5 1.0 5.0 10 100
100
120
140
160
180
200
240
260
CurrentId / %
Time (min
Ò 33 XóQÆ_.
¼ã. _ÈáÍhÏ)rÄ
_: VpÞqnX 170%¹Þ 1ÚsÈô|h¹ÇÌÄXXtQqnvX 50%. ßIXÒÄD MODEL1.TC (1409) X 150Ä Ý½XÇÌ 106%. MODEL1.TRIP L (1408) = 1062 /100 = 102.

CÊsÑ£Ä
DCS 500 C检 71
43210 .80 .60 .50.40.30 .20 .10 .0 7
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2.0
2.1
2.2
2.3
2.4
2.5
0.98
0.9
0.8
0.7
0.5
MO
TO
R'S
SH
OR
T T
IME
OV
ER
LOA
D C
UR
RE
NT
FA
CT
OR
NORMALIZED TIME CONSTANT
PA
RA
ME
TE
R V
AL
UE
OF
MO
DE
Lx.
TC
(xx
xx)
M o tor's P RE LO A D facto r
MOTOR TRIPPING TIME SECONDS
30
50
100
150 200 300 500 1000 2000
1000
2000
2400
900800700
600
500
400
300
200
100
807060
50
40
30
20
10
1500
25
15
150
30 50
100150
200300
5001000
0
1.06
0.95
60
60
125
250
Ò 34 ÇÌ 106%Ê, MODELx.TCXݽÆ

CÊsÑ£Ä
72 DCS 500 C检
BR
AK
E C
ON
TRO
L
AC
T B
RA
KE
BR
AK
E R
UN
LIF
T B
RA
KE
DE
CE
L C
MN
D
TR
EF
EN
AB
LE
TR
EF
OU
T
EM
ES
TO
P B
RA
KE
HO
LD T
OR
Q
ST
OP
DE
LAY
ST
AR
T D
EL
AY
MIN
SP
IND
BR
RE
LE
AS
E
HO
LD R
EF
TO
RQ
UE
AC
T
1030
5
1030
4
1030
3
1030
2
1030
1
304
303
302
301
P1
P2
P3
P4
LO
CA
L
(105
03)
RE
SE
T
SP
(109
02)
ST2
0-32
305
306
307
308
0 0 0 0
RU
N_M
RE
F
3,4
MIN
_SP
EE
D
5

CÊsÑ£Ä
DCS 500 C检 73
• |
ÝÔoM^ô|ÈV¤ÃêÔUÏ|XÛÄGSü×V<G
â3O±Õ'!!BÄ|â¬<Oà9Èü
|<Q¸!OóÔþ±Õo½È¹!'|<
âóQ¥óÏ|ÄDCS 500B X|(BRAKE CONTROL )sÑ+¤oZ|X`HNcÈWѱ|sÑâóz
×V<#×¹0Ä
]< VpS SDCS-CON-2ÎpÈêß¼«sÑÈ|< GÁÜÕ (LIFT BRAKE (10304) = 0 )Ä Vpù0sÑÈí|ãD EMESTOP BRAKE (307)nÖ 0 = ´ (ózÊÊ|<ÁÜ) 1 = Ý (|<GÁÜ)
| (BRAKE_CONTROL) sÑ+
@½±Õ @½±ÕsÑX@½nnÃâ9¾hü+êõ³g9XµË
[HOLD REF] (301)̲Ä&n±Õ@½ÈÃD HOLD TORQ (307)BÄVp [HOLD REF] (301) uݲyÈníD HOLD TORQ (307)nÄ
| |(Ì)Xîg9[BR RELEASE] (302)XD+ê˯ Äî¹D+g9êË9¾ RUNQ¸Ä
ÔãózÛ g9Ã[MIN SP IND] (303) ¹sÑ+XÔãózÛÄ'ô|BXróz"bÔãóz$Êȹg9ÃB!ÄÔãó
zÛ9¾óz¥ (SPEED MONITOR)sÑ+ÈW3Ãê¼Ûê DCS500BXhüsÑ+óÄ
|h( |h(µËÃîD+g9·È²y|sÑ+X
[ACK BRAKE] (304) g9ÃÄúíÈyÚ[ACK BRAKE] (304) ²y|Q¸ LIFT BRAKE (10304), Cʾ rh(Ä
K|ÊÊ 'g9 BR RELEASE(302) ¥ÎK|Q¸Èèr@½±Õ@
½âÈ|<(Ì)È(LIFT BRAKE)(10304)gÎB!Ä8âÈüK|ÊÊÊÈ START DELAY (305) YÈ£óQ¸(DECEL CMND) (10304)ȹ±ÕóznÊÄK|Êʧ3âÈóz×V<ânÃÚ<Ä(6k: 1 = 0.01s)

CÊsÑ£Ä
74 DCS 500 C检
06ÊÊ 06ÊÊXÊâ|<XÁÜÊÌàÄBR RELEASE(302) 0ÈGÎ06Q¸âÈ|sÑ+(BRAKE CONTROL)¹£óQ¸(DECEL CMND)(10303)SÃÚ¥ó<Xg9 0ÄS7ü¤¡=XÔ£óÄ 'rózó"ÊÈ ÔãózÛ(MIN SP IND)g9.Äcâ|<Q¸ ÊÄ ü06ÊÊóÈ, |<¤ (BRAKE RUN)Q¸îSóz×V<±ÕüóznÊXÕß¹0Ä 06ÊÊ STOP DELAY (305) §3âÈ |<¤ Q¸3\È 8Ê|<9±Õ¡=XNÕÄ(6k: 1 = 0.01s)
sÑ ßÒ|üK|`06ÊXÊc .
BR RELEASE
TREF ENABLE
Torque reference
LIFT BRAKE
START DELAY
SPEED .
DECEL CMND
MIN SPEED L (2201)
Delay until torque has reached desired level
Hold Torque/Hold Ref
BRAKE RUN
STOP DELAY
MIN SPEED (12201)
Ò 35 |sÑ
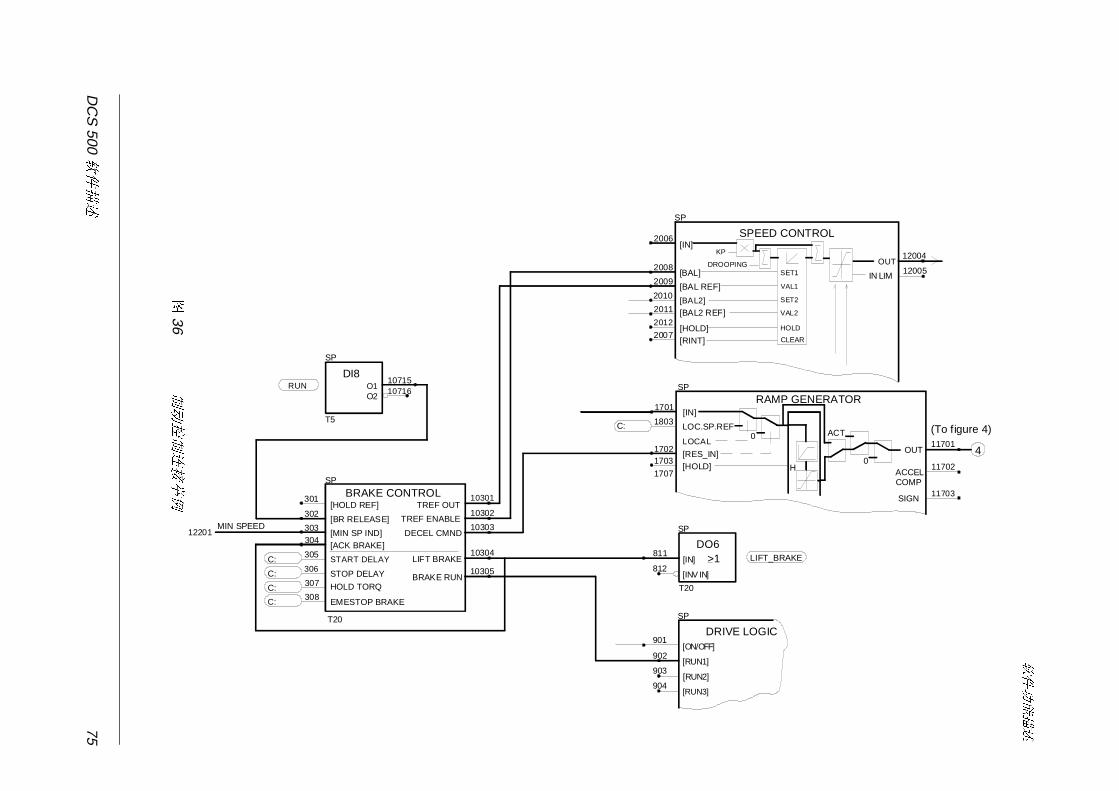
CÊsÑ£Ä
D
CS
500 C检
75
O1DI8
O2
1071510716
RUN
[IN]
DO6
[INV IN]
LIFT_BRAKE811
812>1
TREF OUTBRAKE CONTROL
TREF ENABLE
10301
10302[HOLD REF]
[BR RELEASE]
[MIN SP IND]
START DELAY
STOP DELAY
HOLD TORQ
305C:306C:307C:
301
302
303 10303DECEL CMND
BRAKE RUN10305
SP
T5
T20
SP
SP
T20
EMESTOP BRAKE308
C:
[ACK BRAKE]304
LIFT BRAKE10304
[ON/OFF]
DRIVE LOGIC
[RUN1]
901
902
SP
[RUN2]903
[RUN3]904
MIN SPEED
OUT
SPEED CONTROL
12004
12005
[IN]
[RINT]
[BAL]
[BAL REF]
[BAL2]
[BAL2 REF]
2009
2010
2011
2006
2007
2008
[HOLD]2012
IN LIM
SP
KP
SET1
VAL1
SET2
VAL2
DROOPING
HOLD
CLEAR
[IN]
LOC.SP.REF
[RES_IN][HOLD]
ACT
RAMP GENERATOR1701
1702 11701LOCAL0
H
OUT1703
170711702
ACCEL
SIGN
4
(To figure 4)
SP
0
1803C:
11703COMP
12201
Ò 36
|²y_

CÊsÑ£Ä
76 DCS 500 C检
TREF OUT TREF OUT (10301) |<'ÔÊX@½ngÎ. Wî²y
ózX [BAL REF] (2009) .ÃĹ@½nîÄ10302ÅÃX TREF ENABLE Q¸Bóz×V<XÃÚÚ£Ä
TREF ENABLE egÎ TREF ENABLE (10302) ü BR RELEASE 0 Æ 1¬êÊ,È' START DELAYÄK|ÊÊŧ3 âÈU6X`¡ÕÚÿÖ 0 = TREF OUT (10301) Ê -1 = TREF OUT (10301) 0@½n
DECEL CMND egÎ DECEL CMND (10303) übóz×VóznXÝ´Äc|<XÈY¼uÊ<ÕÁ|ÊÊÊÈ
6ÈS×ókóznÈSÔtó, 'ßõ[BR RELEASE] (302) aõ 0Æ1¬êÊWaõ¡á¯ |ÊÊ|0ÄüÔtó!`06Q¸âÈ ÃÚ¥ó<î¹Q¸Sózng9ÊÄ
LIFT BRAKE 'kó@½ (r@½ = TREF OUT) âÈ gÎ LIFT BRAKE (10304) üb'Ô|Ä
BRAKE RUN gÎ BRAKE RUN (10305) übô|e DRIVE LOGIC sÑ +Xg9µË RUN1, RUN2 ê RUN3, ¹Î¬<X RUNQ¸.
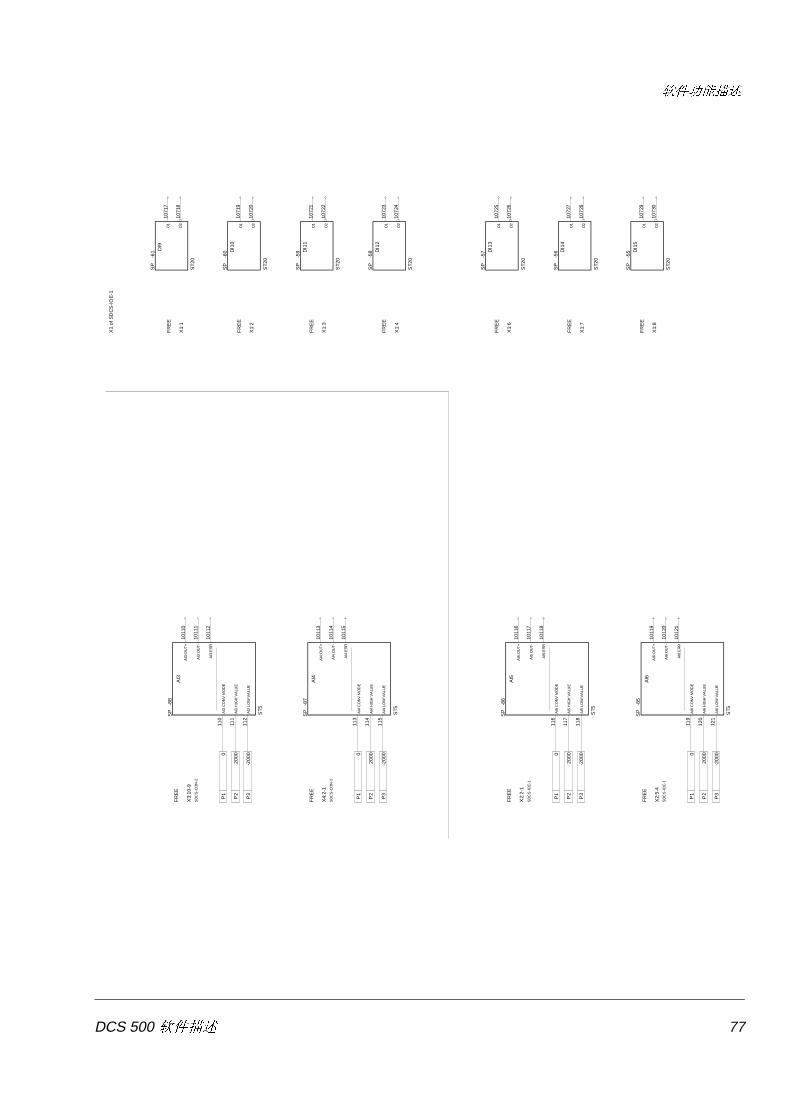
CÊsÑ£Ä
DCS 500 C检 77
AI5
LO
W V
AL
UE
AI5
HIG
H V
ALU
E
AI5
CO
NV
MO
DE
SP
AI5
AI5
:OU
T+
AI5
:OU
T-
AI5
:ER
R
ST5
1011
6
1011
7
1011
8
P2
P3
P1
-86
116
117
118
0
2000
-200
0
AI6
LO
W V
AL
UE
AI6
HIG
H V
ALU
E
AI6
CO
NV
MO
DE
SP
AI6
AI6
:OU
T+
AI6
:OU
T-
AI6
:ER
R
ST5
1011
9
1012
0
1012
1
P2
P3
P1
-85
119
120
121
0
2000
-200
0
O1
O2
SP
ST2
0
DI1
510
729
1073
0
-55
O1
O2
SP
ST2
0
DI1
410
727
1072
8
-56
O1
O2
SP
ST2
0
DI1
310
725
1072
6
-57
O1
O2
SP
ST2
0
DI1
210
723
1072
4
-58
O1
O2
SP
ST2
0
DI1
110
721
1072
2
-59
O1
O2
SP
ST2
0
DI1
010
719
1072
0
-60
O1
O2
SP
ST2
0
DI9
1071
7
1071
8
-61
AI4
LO
W V
AL
UE
AI4
HIG
H V
ALU
E
AI4
CO
NV
MO
DE
SP
AI4
:OU
T+
AI4
:OU
T-
AI4
:ER
R
AI4
ST5
1011
3
1011
4
1011
5
P2
P3
P1
-87
113
114
115
0
2000
-200
0
AI3
LO
W V
AL
UE
AI3
HIG
H V
ALU
E
AI3
CO
NV
MO
DE
SP
AI3
:OU
T+
AI3
:OU
T-
AI3
:ER
R
AI3
ST5
1011
0
1011
1
1011
2
P2
P3
P1
-88
110
111
112
0
2000
-200
0
X2:
5-4
SD
CS
-IO
E-1
FR
EE
SD
CS
-IO
E-1
X2:
2-1
FR
EE
X4:
2-1
FR
EE
SD
CS
-CO
N-2
X3:
10-9
FR
EE
SD
CS
-CO
N-2
FR
EE
X1
of S
DC
S-IO
E-1
X1:
8
FR
EE
X1:
7
FR
EE
FR
EE
X1:
6
X1:
4
FR
EE
X1:
3
FR
EE
X1:
2
FR
EE
X1:
1

CÊsÑ£Ä
78 DCS 500 C检
• =)g9 /gÎ ü DCS 500BXSÞȬÝøþõ³9÷ A13â A14ÈWÀ
üÛßcþnÄVp²yZ SDCS-IDE-1=)SȬùart`þõ³g9· A15â A16 7þD+g9÷ D19DI15Ä VÄ: VÄ Ô´

CÊsÑ£Ä
DCS 500 C检 79
DA
TA
SE
T 4
214
213
212
OU
T
IN3
IN2
IN1
SP
ST5
-94
DA
TA
SE
T 3
OU
T3
OU
T2
OU
T1
INSP
ST5
1012
5
1012
6
1012
7
-93
DA
TA
SE
T 2
211
21020
9
OU
T
IN3
IN2
IN1
SP
ST5
-92
DA
TA
SE
T 1
IN
OU
T3
OU
T2
OU
T1
SP
ST5
1012
2
1012
3
1012
4
-91
FIE
LD
BU
S P
AR
.1
(MO
DU
LE
TY
PE
)
SP
FIE
LDB
US
mod
ul t
ype
dep
ends
of
Par
am
eter
s
P15
P14
P13
P12
P11
ST5
P10
P09
P08
P07
P06
P05
P04
P03
P02
P01
-95
FL
BS
ET
_2
4001
4002
4003
4004
4005
4006
4007
4008
4009
4010
4011
4012
4013
4014
4015
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0

CÊsÑ£Ä
80 DCS 500 C检
• î FIELDBUS ¯ î
Vpübô|ê<ô|ÕXõ³`D+£áóÈùSüÎ
b îõ+X ²y9rtµC£êµËzÄîõ+X_
Ëî FIELDBUSsÑ+9Ĭ<XDBÝ16!µC,|üDB DATASET 1` 3sÑ+ÈosÑ+XgÎÔÝhüXU²yJWsÑ+Xg9éîÈàîDB
2 ` 4ÈÃÚµC¬<ôgϳÄ
ßëØ¡áà_ËX îÖ!<: - NPBA-02 üb PROFIBUS # - NCSA-01 üb ABB X PLC -- CS31 / AC31 - NMBA-01 üb MODBUS # - NMBP-01 üb MODBUS PLUS # - FCI übî AF100â ABBX PLC î - ºêÈ VpSüZ ABB@ÌX PLCÖAC70X±ÈáÔ UÖ!<È3ù`ä îßÄ ÈîµCÈË×£Ä îõ+XÝGmÖ Description of the
drive-specific serial link interconnections
îõ+U!ÜáàXCÊÄSü ß<CÊPûÈâ Ä - NPBA-02; CÊ 2.1 - NPBA-02; CÊ 2.2 * - NCSA-01; CÊ 1.5 * - NMBA-01; CÊ 1.5 * (ÕîÒy) - NMBP-01; CÊ 1.5 * (´Dx6) - FCI; CÊ 1.3 * - AC70; CÊ 1.1-1 *
(ÛÝ * X¤üȹ_ËXîõ+UâݹCÊX¬<!ÜSü)Ä

CÊsÑ£Ä
DCS 500 C检 81
BC
Lo
gic
Rev
ers
.Lo
gic
Brid
ge
Lo
gic
IRE
F0
Logi
c
Res
. f.C
omm
un
BC
no
t Zer
o
Log
ik f
.INH
IBIT
Fa
ult
Cu
rren
t
Brid
ge
of
Sla
ve
Brid
ge
IRE
F2-
Po
l.Bro
th
IRE
F2-
Po
lari
ty
Cur
r.R
ef.2
IRE
F1-
Po
l.Mas
ter
IRE
F1-
Po
lari
ty
Cur
r.R
ef.1
Arm
.CU
RR
.Bo
th
Con
v.C
urr
.Bo
th
Arm
.Cu
rr.S
lave
Con
v.C
urr
.Sla
ve
Fa
ult
Re
vers
ion
Indi
cat.R
eve
rs
[120
9]
*
204
8
AD
J R
EF
1
INH
IB L
ogi
c
DIF
F C
UR
R D
EL
AY
DIF
F C
UR
RE
NT
IAC
T S
LA
VE
FR
EV
DE
LA
Y
RE
V G
AP
RE
V D
EL
AY
1362
2
1360
5
STS
YN
BC
6-P
ULS
E
MA
ST
ER
CU
RR
EN
T R
EF
ER
EN
CE
P6
3604
1360
8
P5
P4
act
ive
, if
[12
09]
= 1
CU
RR
EN
T A
NA
LYS
IS13
601
1360
2
1360
3
1360
4
1361
5
1362
1
3616
ON
/OFF
LO
GIC
(112
05)
1361
636
07
P3
P2
P1
act
ive
, if
[12
09]
= 1
or
2
BR
IDG
E R
EV
ER
SA
L LO
GIC
SP
12
-PU
LS
E L
OG
IC
3608
3609
3610
1361
1
1360
6
1360
9
1360
7
1361
0
1361
2
1361
3
1361
4
-99
12P
ULS
_2
3601
3602
3603
3605
3606
3615
1 10 10 10 150
2048
X18
:12
X18
:11
X18
:10
X18
:09
OU
TP
UT
X1
8S
P
STS
YN
3611
3612
3613
3614
-98
X18
:16
X18
:15
X18
:14
X18
:13
1361
8
STS
YN
SP
INP
UT
X1
8
1361
7
1361
9
1362
0
-97
AI2
_RE
F
6
BC
2

CÊsÑ£Ä
82 DCS 500 C检
• 12 ݶ!B 12- ݶ¬<KÝßëìÖ
- XÍo%XE¡,_V£åZä¶_tûZÈgÎÑo×
- XZ¶×kZÈãX@½¶| Ä
12 ݶ¬<Ý¢ã!BXÄ ózãX 6 Ý ¶¬<È ¢ãX 6 ݶ¬<Ä8ê¬ó÷Ío)¯ Ä
12 ݶXßÆÛCÊY¼rZÈ ü¡0!È3Ô¨nÝGDÈ!ÑS øÄs[¬<5îãÔ¹0Ä
BáàXhüȬ<X!B3áàÖ - 2QϳÖ
12ݶsÑ+±Õá¬×îõ³gÎ-g9ÚÕÎXnµËÕ¢GÃÄ º)ÀX` MASTER – FOLLOWER 1.1
- 4Qϳ: üSü 12 ݶsÑ+XÎÞ× ÔUBÌGDȲyÌhXéîÄ º)ÀX` DCS 500 Planning and Startup for 12 Pulse Power Converters

CÊsÑ£Ä
DCS 500 C检 83
DLO
G S
TA
TU
S
DLO
G.S
AM
PL
INT
DLO
G.T
RIG
G D
ELA
Y
DLO
G.T
RIG
G V
AL
UE
DLO
G.T
RIG
G C
ON
D
000
DA
TA
LO
GG
ER
SP
RE
ST
AR
T
ST
OP
TR
IG
613
611
612
DLO
G.R
ES
TA
RT
DLO
G.S
TO
P
DLO
G.T
RIG
T1m
s
IN5
Ch
.5
1060
1
ST
OP
RE
ST
AR
T
CM
T-T
OO
L
TR
IG
P4
P3
P2
P1
IN6
Ch
.660
6
605
IN4
Ch
.460
4
IN3
Ch
.360
3
IN2
Ch
.260
2
IN1
Ch
.160
1
-102
DA
TA
LOG
607
608
609
610
1
2000
0
200 3
SP
EE
D_
AC
T
4,5
CO
NV
_C
UR
_A
CT
2
U_A
RM
_A
CT
2
U_N
ET
_AC
T
2
F1
_CU
RR
_A
CT
8
AR
M_
ALP
HA
7

CÊsÑ£Ä
84 DCS 500 C检
• DB)< DCS500B ¬ÙÀÔþDB)<übDB£ ¹)<EÝ Ã
)î'Ä £Ãî'X)£ þDB Ä DB)<(DATA LOGGER)sÑ+
6Ã)î'Ö DLOG1.[IN] (601) DLOG2.[IN] (602) DLOG3.[IN] (603) DLOG4.[IN] (604) DLOG5.[IN] (605) DLOG6.[IN] (606) £5î'ÑùüÔnÊÈY¢ DCS500B Y¼Ï)¿ó_Ê Ä XÊÈ(1...1000s) ÃÈhD DLOG.SAMPL INT (610) (1...1000ms)BĹÊÈÍÝî'ÑÌàÄ Ãü CMT/DCS500 ¹KÈÝÒ6êD+ã¥Øî'XÄ
K'¡0ÊȾUÚÔUXD/µËöé²yÌhXDB)<î' DLOG1.[IN] (601) ... DLOG6.[IN] (606) ù¯ ¥ZÄ î¹ßD DLOG.TRIGG COND (607) ùݽº¥5ÊÖ
0 = 꼺¥ 1 = p+ 꼺¥ 2 = 'DB)<î' 1øþ²ÁDBXÂûb DLOG TRIGG VALUE (608)nXʺ¥
3 = 'DB)<î' 1XY DLOG TRIGG VALUE (608) Xʺ¥ 4= 'DB)<î' 1X"b DLOG TRIGG VALUE (608) Xʺ¥ ¼ã! ùýüsÑ+9BÔoÈáXº¥5Ê. º¥âXDÈÃD DLOG.TRIGG DELAY (609) (0 ... 1000)9n.
_: DB)<üb¥óz¡h©ßXóz#ÂÄ £ [STEP] (2002) , STEP RESP (12003).Ä'[STEP] (2002) YB XU$ÈV 10(n 100)ʺ¥Ä B: DLOG1.[IN] (601) ²y 2002 DLOG2.[IN] (602) ²y 12003

CÊsÑ£Ä
DCS 500 C检 85
DLOG.TRIGG COND (607) = 2, 'DB)<î' 1øþ²ÁDBXÂûb DLOG TRIGG VALUE (608)nXʺ¥.
DLOG.TRIGG VALUE (608) = 10 DLOG.TRIGG DELAY (609) = 800 º¥!ȱ- 200 þXDBȺ¥âÈa)ß 800 þXDBÄ
DLOG.SAMPL INT (610) = 3msÈÈhnÄ üBÈhÊÈÔU¼ãÚ|[ × þSXÈhîS¿ó¬êÊXµËDBöÄ DB)<XÕÃD DLOG STATUS (10601)ÏÎ 0 = )<N 1 = )<üDB 2 = óº¥ 3 = º¥â)<06 4 = 06Q¸â)<06 5 = º¥06Q¸â)<06

CÊsÑ£Ä
86 DCS 500 C检
DLY
TE
XT
TY
PE
IN
US
ER
EV
EN
T 6
SP ST2
0
P3
P1
"EX
T.
IND
. 6"
1121
1123
-2
1122
1124
0 0
DLY
TE
XT
TY
PE
IN
US
ER
EV
EN
T 5
SP ST2
0
1117
1119
P3
P1
"EX
T.
IND
. 5"
-3
1118
1120
0 0
DLY
TE
XT
TY
PE
IN
US
ER
EV
EN
T 4
SP ST2
0
P3
P1
"EX
T.
IND
. 4"
1113
1115
-4
1114
1116
0 0
DLY
TE
XT
TY
PE
IN
US
ER
EV
EN
T 3
SP ST2
0
1109
1111
P3
P1
"EX
T.
IND
. 3"
-5
1110
1112
0 0
DLY
TE
XT
TY
PE
IN
US
ER
EV
EN
T 2
SP ST2
0
P3
P1
"EX
T.
IND
. 2"
1105
1107
-6
1106
1108
0 0
DLY
TE
XT
TY
PE
IN
US
ER
EV
EN
T 1
SP ST2
0
P3
P1
"EX
T.
IND
. 1"
1101
1103
-7
1102
1104
0 0

CÊsÑ£Ä
DCS 500 C检 87
• ü_Ê îü_ÊÄ USER EVENTÅ sÑ+ùÚ_Êêßü DCS
500B CÊ. g9[IN] 1ÊÚê¼y:êp)p)< Fault Logger Ä SüD TYPE ݽê¼_ÊXO_: 0 = FAULT: TRIPLEVEL 1 (²Ã, `¢yº<Ô) 1 = FAULT: TRIPLEVEL 2 (²Ã`yº<Ô) 2 = FAULT: TRIPLEVEL 3 (yº<Ô) 3 = ALARM (¾Ýy:Û) 4 = EVENT (¾)p)<) SüD DLY (ÊÊ) ݽÊÊÄ ê¼_ÊÕÁÝXÊÈOSbXÊÊÊÈÈÈWyÄ

CÊsÑ£Ä
88 DCS 500 C检
FA
ULT
WO
RD
1
OP
ER
AT
ING
HO
UR
S
LA
TE
ST
ALA
RM
ALA
RM
WO
RD
3
ALA
RM
WO
RD
2
ALA
RM
WO
RD
1
LA
TE
ST
FA
ULT
FA
ULT
WO
RD
3
FA
ULT
WO
RD
2
T20
1110
9
1110
8
1110
7
1110
6
1110
5
1110
3
1110
2
SP
FA
ULT
HA
ND
LIN
G
1110
4
1110
1
-103
FLT
HN
DL
0 -1
SP
EE
D:
100%
CU
R,F
LX
,VLT
:-10
0%
CU
R,F
LX
,VLT
: 1
00%
1250
9
1250
8
1250
7
1250
6
1250
5
1250
4
1250
3
1251
0
1251
1
1251
3
1251
2
1251
5
1251
4
1250
2
1250
1C
ON
ST
AN
TS
SP
ST
SP
EE
D:-
100
%
TO
RQ
:-1
00%
TO
RQ
:10
0%
EM
F:1
00%
314
16
100
0
1001
021
-73
SIG
12(
CU
RR
._S
TE
P)
SIG
11(
CU
RR
. RE
F)
SIG
10(
FO
RC
E R
EV
)
SIG
9(F
OR
CE
_F
WD
)
SIG
8(E
MF
RE
F)
SIG
7(F
LU
X R
EF
)
SIG
6(L
OA
D S
HA
RE
)
SIG
5(T
OR
QU
E S
TE
P)
SIG
4(T
OR
Q.
RE
F B
)
SIG
3(T
OR
Q.
RE
F A
)
SIG
2(S
PE
ED
ST
EP
)
SIG
1(S
PE
ED
RE
F)
FR
EE
SIG
NA
LS
1252
7
1252
6
1252
5
1252
4
1252
3
1252
2
1252
1
1252
0
1251
9
1251
8
1251
7
1251
6
ST
SP
-74
CO
NS
T_
0
CO
NS
T_
M1_
TR
UE
CO
NS
T_
1
CO
NS
T_
2
CO
NS
T_
10
CO
NS
T_
100
CO
NS
T_
100
0
CO
NS
T_
314
16
EM
F_
MA
X
8
TO
RQ
_M
AX
6
TO
RQ
_M
AX
_N
6
CO
NS
T_
409
5 8
CO
NS
T_
M40
95
CO
NS
T_
200
00
CO
NS
T_
M20
000
SP
EE
D_
ST
EP
5
TO
RQ
_R
EF
_B
6
TO
RQ
_S
TE
P
7
LO
AD
_S
HA
RE
6
CU
R_R
EF
7
CU
R_S
TE
P
7
CÊsÑ£Ä
DCS 500 C检 89
• p 'pêy:¥óÊÈîóí÷Õ. o·ÕîôÕp)
< (Ôî 100 þú¥óÊȵCXí÷Õ)Äùî¬êCMT/DCS500¹K9¹p)êy:·ÕÄ
¥óo_p_ÊÊÈϳCÊÚpç<`p)<X DB±,S SDCS-CON-2 ÞX,|<Ä
S SDCS-CON-2 ݾßcÄßcîÚô|'!XÕîDÕuÎ9Ä o·Õü` "¡0ÛÐ" ÝÈâÄ
pØÚ(FAULT HANDLING)sÑ+
£Ôþpêy:/ÕÈÑÝؾXí÷ÕÄî¥óXDBêy:0Ô¥XµC)ß9Ä LATEST FAULT (11106) `Ô¥Xy: LATEST ALARM (11107))ÄpÕ+ FAULT WORD1 (11101), FAULT WORD2 (11102), FAULT WORD3 (11103) `y:Õ+ ALARM WORD1 (11104), ALARM WORD2 (11105), ALARM WORD3 (11106),oY ÙÀZ DCS500B ÝÃÑîÎXp`y:XÕ!.
pây:µË ¡0ÛÐ
p+! ) A – µË< 11101/11102/11103
y:+! ) A – µË< 11104/11105/11106
p)< Ô¥XpµCÈâD LATEST FAULT (11107)ÏªÈ Ô¥Xy:µCâD LATEST ALARM (11108)컀 ¹D3Ã0p)<XÎöéÄp)<Ã) 100 þú¥óÊȵCX_ÊÈy:`pÄ p)<XYÃî CMT/DCS500 ¹Kê¬ÏªÄ

CÊsÑ£Ä
90 DCS 500 C检
D(CONSTANTS) sÑ+
DCS 500B CÊBZÔoD, ùübhüCÊê©Ä
eD eD gÎ D CONSTANT 0 (12501) LOGIC 0 () CONSTANT -1 (12502) LOGIC 1 (ó)
D+D D+D gÎ D CONSTANT 1 (12503) 1 CONSTANT 2 (12504) 2 CONSTANT 10 (12505) 10 CONSTANT 100 (12506) 100 CONSTANT 1000 (12507) 1000 CONSTANT 31416 (12508) 31416 (≈ π * 100) EMF 100% (12509) 3786 TORQ 100% (12510) 4000 TORQ -100% (12511) -4000 CUR,FLX,VLT 100% (12512) 4095 CUR,FLX,VLT -100% (12513) -4095 SPEED 100% (12514) 20000 SPEED -100% (12515) -20000
¾µË
(FREE_SIGNALS) sÑ+
oµËÃî CMT/DCS500 ꬯ B. JÃ0áàhüO_XnÄô|; ¹n!ÈWO²y7BXg
9Ãô|!Ñ; ÄVpZ BACKUPSTORE MODE Èoáî,|½
BD gÎ ×È SIG1(SPEED REF) (12516) -30000...30000 SIG2(SPEED STEP) (12517) -30000...30000 SIG3(TORQUE REF A) (12518) -30000...30000 SIG4(TORQUE REF B) (12519) -30000...30000 SIG5(TORQUE STEP) (12520) -30000...30000 SIG6(LOAD SHARE) (12521) -30000...30000 SIG7(FLUX REF) (12522) -30000...30000 SIG8(EMF REF) (12523) -30000...30000 SIG9(FORCE FWD) (12524) -30000...30000 SIG10(FORCE REV) (12525) -30000...30000 SIG11(CURRENT REF) (12526) -30000...30000 SIG12(CURRENT
STEP) (12527) -30000...30000

CÊsÑ£Ä
DCS 500 C检 91

)
DCS 500 C检 I 1
A Actual speed based on EMF, 25 adaptive gain, 32 Additional Commutation Reserve, 45 AI1, 6 AI2 function block, 37 AITAC, 6, 24 AITAC CONV MODE, 24 ALARM WORD1, 92 ALARM WORD2, 92 ALARM WORD3, 92 Analog Input Error Codes, 8 Analog Input Function Block, 6 Analog Output Function Block, 9 Analog Outputs, 9 analogue tacho generator, 23, 24 ARM ALPHA, 45 ARM ALPHA LIM MAX, 45 ARM ALPHA LIM MIN, 45 ARM DIR, 47 Armature Current Scaling, 43 Autotuning, 13
B backlash, 32, 39 BACKUP STORE MODE, 3 Brake Release, 76
C Calculation of speed, 25 Changing of the direction, 27 Closing Control of the Contactors, 16 CMT/DCS500, 4, 21 Coast Stop, 19, 20 compensation, 28 Connections between Function Blocks, 4 Const_Ref , 26 constant reference, 26 CONV MODE, 6 Current Difference Alarm, 43 Current Limitations, 37 Current Reference Limitation, 43 Current Reference Rise Time, 43 Current Response Test, 43
D Data Logger , 87 DCF503-0050, 51 DCF504-0050, 51 Diagnostics , 92 Digital and Analog I/O, 5 Digital Input Function Blocks, 5 Digital Output Function Block, 5 Discontinuous Current Point, 44 Drive Logic, 16 Drive Logic Function Block, 16 DROOPING, 33
DXN, 45, 46 dynamic braking, 17
E e, 31 Earth Fault, 66 EME STOP, 19 EME STOP MODE, 19, 27 Emergency Stop, 19 emergency stop function, 27 EMESTOP ACT, 19, 20 EMESTOP RAMP, 27 EMF, 23, 61 EMF reference handling, 62 EMSTOP RAMP, 18, 19, 20 external torque reference, 42
F Fault Alarm Signals, 92 Fault Handling, 92 Fault Logge , 92 FAULT WORD1, 92 FAULT WORD2, 92 FAULT WORD3, 92 FEXC SEL, 50, 51 FEXC STATUS, 50 FIELD ACK VIA AI, 51 FIELD ACK VIA DI, 51 FIELD HEAT SEL, 60 Field heating , 60 FIELD MODE, 61 Field Reversal , 54 FIELD WEAK POINT, 62 Filtering of the actual speed, 25 Firing Angle Limitation, 45 follower drive, 37 Force field direction, 55 FPROM-memory circuit, 2 Free signals , 93 Free Wheeling Function, 53 FRS, 30, 32 Function Blocks , 4
G Gear backlash compensation, 40 GEAR.START TORQ, 39
H HOLD, 27 Holding Torque, 76
I I MOTN A, 47 Identification of the Converter Software version, 3 Identification of the Field Exciter Software version, 3 incremental encoder, 23, 24
integrator time constant, 32
K KLIXON IN, 69 KPSMIN, 32 KPSWEAKFILT, 32
L LATEST ALARM, 92 LATEST FAULT, 92 Limitation, 26 Load sharing, 37 LOCAL, 21 Local/Remote , 21 LOCAL/REMOTE, 27 Logical constants, 93
M Main Reference Selection , 26 Manual Tuning, 12 Measured Motor Temperature, 67 Measurement selection, 67 Minimum Speed Indication, 76 Motor 1 Protection , 67 Motor 2 Protection , 67 motor temperature, 67
N Network overvoltage, 65 Network reactance, 46 Network undervoltage, 65 Network voltage measurement, 65 Numerical constants, 93
O Opening Control of the Contactor, 17 Opti-Torque, 56 Over -temperature, 66 Overcurrent, 65 overtemperature fault, 17
P Parameter Sets, 2 Passing of the RAMP function, 28 PERIOD btw.POT1/2, 12 PI controller, 44 polarity of the analogue tacho, 24 POT1 VALUE, 12 POT2 VALUE, 12 proportional gain, 32 PS5311, 24 PT100 sensors, 67
R Ramp function, 28 Ramp Generator, 27 REF SEL function block, 26

)
I 2 DCS 500 C检
Reset the drive fault, 20 rise time of the current reference, 43 Run Control, 17 RUN-command to zero, 18 RUNNING, 17
S Saving the program, 2 Scaling of the actual voltage, 25 SDCS-CON-2, 5, 9, 24 SDCS-FEX-1, 50 SDCS-FEX-2, 51 SDCS-IOB-2x, 5 SDCS-IOB-3, 9, 24 SDCS-IOE-1, 5 Selection of the Field Exciter, 50 Settings, 11 Short Circuit Current, 46 SOFTPOT, 26 Software version, 3 SPEED ACT, 25 SPEED ACT FILT, 25 SPEED ACT FTR, 25 speed control, 30 Speed Control Function Block , 32
SPEED ERROR function block, 30 SPEED MEAS MODE, 24 Speed measurement mode, 24 speed reference, 23 Speed scaling , 23 Speed Step, 30 SQUAREWAVE, 12 stall protection, 34 START INHIBIT, 17 Stop Control, 18
T tacho generator adaption board, 24 TACHO PULSES, 24 TACHOPULS NR, 24 TEST REF, 12 TEST REF SEL, 12 thermal model, 69 thermal preloading, 71 Thermal time constant, 72 TORQ REF HANDLING function block, 42 Torque Limits, 38 torque reference chain, 37 Torque Reference Scaling, 37
Torque reference selection, 37 Torque Step, 43 trip main contactor and field contactor, 17 trip main contactor, field contactor and fans, 17 trip the main contactor, 17 tripping, 17 Tuning of Current Regulator, 45
U U CONV V, 65 U MOTN V, 47 U NET MIN1, 65 U NET MIN2, 65 U SUPPLY, 47, 65
W WIN MODE, 31 WIN SIZE, 31 window control, 31 Window Control, 31 Window Size, 31
Top Related