






Languages
Pages
Legal


EDH-OFW2011
Coupling SUNDIALS with OpenFOAM6
thOpenFOAM Workshop
E. David Huckaby
June 14, 2011
2
Outline
• Motivation
• Mathematics
• Basic Design
• Examples
– Food Web – Steady & Unsteady
– Pitz-Daily

3
Motivation
• Why couple SUNDIALS and OpenFOAM ?
– Improve solution convergence over current segregated solution algorithms
• SUNDIALS vs. alternatives
– Comprehensive – (write own solver)
– Lightweight – Trilinos, PetSC
– User Familiarity (via. Cantera) vs. NITSOL
[1] Luo, Baum, Lohner, 1998, JCP 46, 644-690[2] Pawlowski, Shadid, Simonis, Walker, 2006, SIAM Review 48-2, 700-721[3] Pernice, Tocci, SIAM J. Sci. Comp. 23-2, 398-418[4] Evans, Knoll, Pernice, 2006, JCP 219, 404-417[5] Vuik, Saghir, Boerstoel, 2000, IJ Num. Meth. Fluids 33, 1027-1040[6] Bockelie, Tang, Denison, Wang, Cremer, Chen, 2003, Workshop on Solution Methods for Large Scale Non-Linear Problems[7] Pernice, Zhou, Walker, 1997, University of Utah Center for High Performance Computing

4
SUNDIALS
• Suite of solvers
– CVODE – ode• CVODES – add sensitivity analysis
– KINSOL – nonlinear algebraic equations
– IDA – differential algebraic equations (DAE)• IDAS – add sensitivity analysis
– User supplies the physics function, F
• Features
– Serial & Parallel, “Exact” & Inexact Newton SolversHindmarsh, Brown, Grant, Lee, Serban, Shumaker, Woodward https://computation.llnl.gov/casc/sundials/main.html
),( tyFdtdy
=
0)( =yF
( ) 0,, =tyyF

5
Nonlinear Iteration
• At each time step a DAE or ODE system form nonlinear algebraic system
• Newton
– Solve
– Until
• Approximate Newton (Picard, SIMPLE, …)
• Inexact Newton
FJsxxxFsxJ
x
kkkkkk
∇=+=−= +1)()(
)()( kkkappr xFsxJ −=
)()()( kk
kkk xFxFsxJ η<+
relabsk xFxF εε +<+ )()( 01
Knoll and Keys, 2006, JCP 193, 357–397Collier, Hindmarsh, Serban, Woodward,KINSOL v.2.6

6
Method KrylovVariable
ObjectiveFunction
MV Product
None s F(x)
Right z = P s F(x)
Left s P-1F(x)
Fixed Point s G(x) = F(x) - x
Inexact Newton
• Solve for “s” using “Jacobian Free” Krylov Iteration Method
• only requires matrix-vector product
)()()(2
kk
kkk xFxFsxJ η<+
εε )()(()(
11 xFzPxFzPJ −+
≈−
−
εε )()()(
111 xFPsxFPsJP
−−− −+
≈
εε )()( xGsxGsJG
−+≈
εε )()( xFsxFJs −+
≈
Knoll and Keys, 2006, JCP 193, 357–397

7
Design - Interface to SUNDIALS
• GOAL – reduce explicit dependencies in two packages
• SUNDIALS Design - Objected Oriented “C”• Classes: KinMEM, IDAMEM, NVector, ..• Member functions, KinSet__(KinMEM,….)
• Interface (KINSOL, IDA)
– similar to Cantera’s interface to CVODE(S)• Interface (“.H”) is not dependent on SUNDIALS
• Dependency is in the implementation (“.C”)
• Static call back functions
– Classes: Kinsol , KinsolUser, Ida, IdaUser• physics module which inherits KinsolUser or IdaUser

8
Design – Physics Module
• Physics Modules (OpenFOAM)
– Turn solvers into objects
– Class contains fields AND equations• Similar to turbulence and radiation models
– No dependence on SUNDIALS
• SUNDIALS/OpenFOAM Physics Module
– Inherits from KinsolUser or IDAUser
– Container for OpenFOAM solver object• FoodWeb, Incompressible Flow, …

9
Outline
• Motivation
• Mathematics
• Basic Design
• Examples
– Food Web – Steady & Unsteady
– Pitz-Daily

10
• Reaction-Diffusion Equation
“ci“: M prey & M predators
– Steady (KINSOL) – M = 3
– Unsteady (IDA) – M = 1
Food Web Model
015.01 ==== βαpreypred dd
5103)0,(1)0( ×==== txckc predprey
( ) ),( cxfcdtcm iii
ii
+∇⋅∇=∂∂
( )5
2
10)0,(
)1()1(1610)0,(
==
−−+==
txc
yyxxitxc
pred
preyprey
1000505.01 ==== βαpreypred dd
44 105101
00
00
−×===
−−
−−−−−−
=
GEA
AEEAEE
GGAGGA
aij
11
01
−==
==
preyprey
predprey
bbmm
+= ∑
≠ jijijiii caxgbccxf )(),(
( ))4sin()4sin(1)( yxyxxg ππβα +++=
Brown, 1986, SIAM J. Applied Math, v.46, no. 3Collier and Serban (KINSOL), Hindmarsh, Serban, Collier (IDA)
Model Parameters

11
Food Web “Physics” Class
• Calculate increment from the residual
• OF does time integration (KINSOL)
• Time integration outside of OF
void PredatorPrey::calcIncrement(u[])..tmp<fvScalarMatrix> CEqn(M_[i]*(fvm::ddt( dC_ ) - fvc::ddt(dC_) )- fvm::laplacian(Diff_[i],dC_,"laplacian(Diff,Conc)")+ fvm::Sp( (rateAA_[i]*freqOverConc)*Conc_[i] ,dC_)-Resid );
void PredatorPrey::calcIncrement(Rz[], z[], alpha)..tmp<fvScalarMatrix> CEqn(fvm::Sp( timeCoeff*scalar(alpha)*M_[i], dC_)- fvm::laplacian(Diff_[i],dC_,"laplacian(Diff,Conc)")+ fvm::Sp( (rateAA_[i]*freqOverConc)*Conc_[i] ,dC_)- Resid );
uPu 1−←
ztss RPPz 1)( −+← α

12
Prey Number Density for Kinsol
• Run problem using tolabs = tolrel =10-5 on a 20x20 mesh
KinsolC
KinsolC++
SegregatedOpenFOAM
KinsolOpenFOAM
Reaction Laplacian + Reaction Diagonal
5x5 5x5 5x5 5x5 20x20
Lower Left
Prey 1.6253 1.16253 1.16581 1.16558 1.16515
Predator 34875 34875 34973.4 34973.4 34953.4
Upper Right
Prey 1.2637 1.2637 1.25179 1.25179 1.25491
Predator 37908.7 37908.7 37551.8 37551.8 37645.5

13
Kinsol-Open Solutions
yxxg +=1)(
( ) ),( cxfcd iii
+∇⋅∇
Prey/m3
Pred/m3
“Food” for prey “poison” for predator
Residuals
14
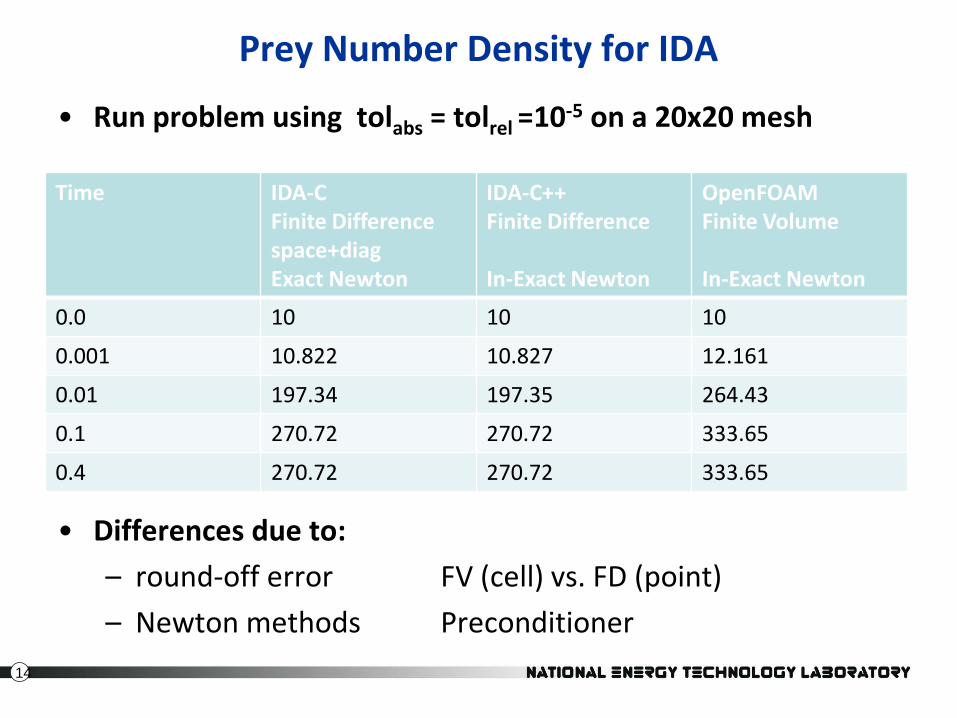
Prey Number Density for IDA
• Run problem using tolabs = tolrel =10-5 on a 20x20 mesh
•
• Differences due to:
– round-off error FV (cell) vs. FD (point)
– Newton methods Preconditioner
Time IDA-CFinite Differencespace+diagExact Newton
IDA-C++Finite Difference
In-Exact Newton
OpenFOAMFinite Volume
In-Exact Newton
0.0 10 10 10
0.001 10.822 10.827 12.161
0.01 197.34 197.35 264.43
0.1 270.72 270.72 333.65
0.4 270.72 270.72 333.65

15
Prey Number Density
Green - OpenFOAM (cell)Red -IDA-C++ (point)Blue – IDA-C++ (point->cell)

16
Final Prey Number Density
IDA -C++
IDA-OpenFOAM

17
Incompressible Flow
• Simple class for (steady & unsteady) incompressible flow based on SIMPLE algorithm
– Residual & Left - Preconditioner for Ida
– Residual & Right - Preconditioner for Kinsol
– Fixed-Point Residual Preconditioning for Kinsol• Necessarily have a standard SIMPLE solver
• Advantageous as solver complexity increases
• <?>SimpleFoam solver
– Provides interfaces between simple class and SUNDIALS packages

18
Laminar Pitz Daily
KinsolRight Precond
KinsolFixed Point
Picard SIMPLE
Time(s) 129 s 138 s 198 s 146 s
Machine zero Machine zero 1000 iters 1000 iters
Mass L2 1.1 e-12 7.6 e-11 2e-7 1.32
Mass abs-max 8.9 e-12 9.1 e-10 4.77e-6 83.3
Mom. L2 2.1 e-12 9.4e-8 0.016 98.9
Mom. abs-max 9.0 e-12 1.2e-6 0.080 5314
• Tested on Pitz-Daily with ν = 0.01 m/s2

19
Laminar Pitz-Daily
• Velocity Profiles are nearly identical
12 m/s 0 m/s 5 m/s -1 in
+1 in
Kinsol-Right
Kinsol-Fixed Point
Picard-SIMPLE

20
Turbulent Pitz-Daily
• Solver Approach
1. nonlinear iteration on velocity & pressure followed by2. N SIMPLE sweeps on U, p & M1 turbulence corrections
3. M2 turbulence corrections
• System is much less robust
– Selection of input parameters • loose tolerance at the beginning – tighten toward convergence
• “step-size”
– Turbulence model • Reynolds stress seemed to work better
– Need “Globalization Methods”

21
Results
Fixed Point
Right Pre.
Not quite converged. ….

22
Future Work
• Testing and exploration of existing software interfaces
– Solution Strategies• Improve variable and residual scaling
– Ida with incompressible flow
– Include turbulence models in nonlinear iteration
• Code “clean up”
– generalization, templates, better names, comments,..
– Extend to other physical systems
– Additional Capabilities• Sensitivity Analysis – IDAS, CVodeS, ..
• Alternative Packages - NITSOL, Trillinos (NOX), ..
Top Related