






Languages
Pages
Legal


AMBIGUITIES RESOLUTION WITH GPS AND GLONASS MEASUREMENTS
IN OBSTRUCTED ENVIRONMENT
MASTER THESIS
Submitted for the degree in Master of Science in Sciences and Environmental Engineering
ÉCOLE POLYTECHNIQUE FÉDÉRALE DE LAUSANNE
Geodetic Engineering Laboratory
By
Leïla KLEINER
June 2010

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -3-
Table of contents
I ABSTRACT ........................................................................................................................... 6
II RÉSUMÉ ............................................................................................................................... 6
III AKNOWLEGMENTS ............................................................................................................. 7
IV INTRODUCTION ............................................................................................................... 8
IV.1 CONTEXT ................................................................................................................................ 8
IV.2 PROJECT OBJECTIVES ......................................................................................................... 9
IV.3 THESIS OUTLINE ...................................................................................................................... 9
V STAT OF THE ART ............................................................................................................... 11
VI PROCESSING ................................................................................................................. 12
VI.1 SATELLITE DATA ................................................................................................................... 12
VI.1.1 GLOBAL SATELLITES SYSTEMS .................................................................................... 14
VI.1.2 GNSS ERRORS .............................................................................................................. 16
VI.1.3 GPS SPECIAL FEATURES ............................................................................................. 17
VI.1.4 GLONASS SPECIAL FEATURES................................................................................... 17
VI.2 PLANSOFTTM PROCESSING................................................................................................ 19
VI.2.1 THE OBSERVATIONS .................................................................................................... 19
VI.2.2 ENTIRE PROCESS OVERVIEW .................................................................................... 20
VI.2.3 INITIALIZATION OF REQUIRED PARAMETERS WITH CODE MEASUREMENTS ... 21
VI.2.4 PARAMETERS INITIALIZATION AND VELOCITY DETERMINATION WITH DOPPLER MEASURMENTS ........................................................................................................ 22
VI.2.5 POSITION DETERMINATION WITH CARRIER PHASE MEASURMENT ................... 23 VI.2.5.1 OBSERVATION PREPARATION ............................................................................................................ 24 VI.2.5.2 INTER-STATION SINGLE-DIFFERENCE STEP ........................................................................................ 25 VI.2.5.3 INTER SATELLITE DOUBLE-DIFFERENCE STEP ..................................................................................... 26 VI.2.5.4 AMBIGUITIES RESOLUTION ................................................................................................................... 28 VI.2.5.5 RELIABILITY OF THE FIXED AMBIGUITIES FOUND .............................................................................. 33
VI.2.6 CYCLE SLIP DETECTION ............................................................................................. 36
VI.3 ANALYSIS TOOLS ................................................................................................................. 36
VI.3.1 REQUIREMENTS DEFINED BY THE APPLICATION ................................................... 36
VI.3.2 STATISTICS TOOLS ........................................................................................................ 38 VI.3.2.1 A PRIORI QUALITY OF COMPUTED SOLUTION ................................................................................ 38 VI.3.2.2 CRITERIONS TO ASSESS ACCURACY AND PRECISION ................................................................. 40 VI.3.2.3 INTEGRITY, CONTINUITY AND AVAILABILITY OF MEASURMENTS ................................................. 43
VII DATA ANALYSIS ............................................................................................................ 45
VII.1 DATA ANALYSED ............................................................................................................. 45
VII.1.1 GNSS-INS REFERENCE................................................................................................. 45
VII.1.2 GNSS PLANSOFT DATA .............................................................................................. 46
VII.2 DATA SET UNDER TREES CLOSE TO THE BOW RIVER ................................................. 49
VII.2.1 TEST DESCRIPTION ....................................................................................................... 49
VII.2.2 GNSS-INS REFERENCE FOR THE BOW RIVER DATA SET ....................................... 51
VII.2.3 GNSS PLANSOFT SOLUTION FOR THE BOW RIVER DATA SET ............................ 54 VII.2.3.1 GLOBAL QUALITY OF THE COMPUTATIONS 5 AND 6 FOR THE GLOBAL DATA SET............ 55
VII.2.4 DATA ANALYSIS ........................................................................................................... 56 VII.2.4.1 INTERNAL QUALITY OF GNSS PLANSOFT DATA .......................................................................... 56 VII.2.4.2 IMPACT OF THE AMBIGUITIES RESOLUTION ................................................................................ 62 VII.2.4.3 COMPARISON OF DIFFERENTS ENVIRONMENTS ....................................................................... 65 VII.2.4.4 GAIN OF GNSS VERSUS GPS ALONE ............................................................................................ 74

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -4-
VII.3 ANALYSIS OF THE INFLUENCE OF THE NATURE OF OBSTACLES OVER THE
SOLUTION ........................................................................................................................................ 79
VII.3.1 TEST DESCRIPTION ....................................................................................................... 79 VII.3.1.1 GNSS_INS REFERENCE FOR THE TREES AND BUILDING DATA SET .......................................... 80
VII.3.2 GNSS PLANSOFTTM SOLUTION FOR THE TREES AND BUILDING DATA SET ....... 80
VII.3.3 DATA ANALYSIS ........................................................................................................... 81
VIII CONCLUSION AND PERSPECTIVES.............................................................................. 84
IX TABLES DES ILLUSTRATIONS .......................................................................................... 87
IX.1 TABLE OF FIGURES: ............................................................................................................. 87
REFERENCES ....................................................................................................................................... 89
X ANNEXES OF COMPUTATIONS: ...................................................................................... 93

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -5-
ACRONYM LIST
Compass: Global navigation system of China
DD: double difference / double differencing / double differenced
DOP: Dilution of Precision
ECEF: Earth-Centred Earth-Fixed Coordinate System
EGNOS: European Geostationary Overlay Service, augmentation System in Europe
Galileo: Global navigation system developed by Europe
GDOP: Geometric Dilution of Precision
GLONASS: GLObal Navigation Satellite System of the Russian Federation
GLONASST: GLONASS clocks time
GNSS: Global Navigation Satellite System
GNSS-INS: Relative to GPS and GLONASS coupled to inertial data
GPS: Global Positioning System developed by the United States
HDOP: Horizontal Dilution of Precision
IMU: Inertial Measurement Unit
INS: Inertial Navigation System
IRNSS: India Regional Navigational Satellite System
MSAS: Satellite-based Augmentation System in Japan
PDOP: Position Dilution of Precision
QZSS : Quasi-Zenith Satellite System in Japan
SBAS: Satellite based augmentation system
SD: single difference / single differencing / single differenced
UTC_SU: Universal Coordinated Time of Soviet Union time standard
VDOP: Vertical Dilution of Precision
WAAS: Wide Area Augmentation System in USA
LIST OF OPERATORS
a vectors are in bold and lower-case
A matrices are in bold and upper-case
is the between-receiver differencing of quantity a
is the between-satellite differencing of quantity a
δa is the between-epoch differencing of quantity a
is the between-satellite between-receiver double differencing of a
A-1 is the inverse of A
AT is the transpose of A
is the estimated value for a
is the solution corresponding to a
is the rate of change of a
is the absolute value of quantity a
is the nearest integer operation on quantity a

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -6-
I ABSTRACT
The localization of a moving-sensor like laser-scanner or a camera ordinary is ordinar-
ily done with a combination of satellite and inertial data. This measurements combi-
nation allows reaching a sufficient continuity and integrity of the position whatever
the environment crossed. The satellite measurements are used to correct the bias of
the inertial location. They need to be accurate enough, even in closed environment
such as under trees or in urban areas. The highly precise relative dynamic positioning
is based on precise dual frequency carrier phase observations, and usually com-
puted with double differencing process. A prerequisite for carrier phase positioning is
the ambiguity resolution. Once the integer carrier-phase ambiguities are fixed cor-
rectly, the positioning reaches a sub-centimetre precision. This resolution of the am-
biguities is complicated in obstructed environments because cycle slips affect the
continuity of the satellite signal. By using other satellite systems, the measurement
redundancy as well as the accuracy, availability and reliability of the final position
are increased. The GLONASS Russian satellite system completes well the commonly
used Global Satellite System (GPS) and can be used to augment GPS data. Again
since 2009, this system offers 21 available satellites over the 24 satellites composing
the full operational GLONASS constellation. As demonstrated in this project, this
measurement augmentation using GPS and GLONASS data is especially relevant for
obstructed environments. The computation of the final solution presents difficulties
linked especially with the differences in signal structure between the two satellite
systems. This project presents the main steps of the software PLANSoftTM built by the
PLAN research group of the University of Calgary. This software computes precise
positions using GPS and GLONASS dual frequency carrier phases. Tests in obstructed
environment were conducted to analyse different kinds of computation parameters,
the ambiguity resolution and the gain obtained with GLONASS.
II RÉSUMÉ
La localisation d‟un capteur mobile tel qu'un laser scanner ou un appareil photo-
graphique est usuellement réalisée grâce à une combinaison de mesures satellitai-
res et inertielles. Cette combinaison de mesures permet d‟atteindre une continuité
et une intégrité suffisante quelque soit le milieu traversé. Les mesures satellitaires seu-
les sont souvent suffisantes en zones non obstruées. Les mesures satellitaires sont utili-
sées pour corriger la dérivée de la localisation inertielle.
Elles ont donc besoin d‟être spécialement précises, même dans des environnements
fermés comme sous des arbres ou en milieu urbain. Une position précise en mouve-
ment est basée sur des observations de phase double fréquences, généralement
calculées par un processus de double différence.
Une condition préalable pour le positionnement grâce à des mesures de phase est
la résolution des ambiguïtés de la phase porteuse. Une fois les ambiguïtés fixées, le
positionnement atteint une précision sub-centimétrique. Cette résolution
d‟ambiguïtés est complexe, particulièrement en environnement obstrué, où des
sauts de cycles affectent la continuité du signal satellite. L‟augmentation des mesu-
res par l‟utilisation de satellites d‟autres systèmes améliore la précision, la disponibilité
et la fiabilité de la position. Le système de satellites russe GLONASS complète effica-
cement le Global Positioning System (GPS) américain couramment utilisé mondia-
lement, et peut être utilisé pour enrichir les données GPS. Depuis 2009, le système
GLONASS offre à nouveau 21 satellites sur les 24 de la constellation opérationnelle

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -7-
complète. Comme démontré dans ce projet, l‟augmentation des mesures GPS par
des mesures GLONASS est particulièrement pertinente pour des environnements obs-
trués. Le calcul de la solution finale présente des difficultés liées notamment à des
différences de structure du signal des deux systèmes de satellites. Ce projet présente
les principales étapes du calcul réalisé par le logiciel PLANSoftTM développé dans le
groupe de recherche PLAN à l‟Université de Calgary. Ce logiciel calcule une posi-
tion précise utilisant des mesures de phase double fréquence GPS et GLONASS. Des
tests en environnement obstrué, très densément végétalisé, permettent d‟analyser
différents paramétrages de calcul, la résolution des ambiguïtés et le gain obtenu
avec GLONASS.
III AKNOWLEGMENTS
I would like to thank Dr. Gérard Lachapelle, director of the research Group PLAN for
his excellent supervision and financial support during my Master Project done at the
University of Calgary. His advices during the presentations and discussions have
been very precious to improve my work. Having had the opportunity to realise my
Master Project in a research group at the forefront of the navigation technology was
an exceptional experience not possible without him.
Deep gratitude and appreciation are extended to the professor Bertrand Merminod,
head of the Geodetic Engineering Laboratory of EPFL for his supervision, precious
advices and numerous readings and feedbacks. His encouragements have marked
my career and allowed me to progress. His many teachings during my studies in EPFL
provide me with the basis of my knowledge in satellite navigation and the mean to
progress.
I want to give specials thanks to Dr. Valérie Renaudin for the energy and for advising
me, reading my work and giving me numerous feedbacks during my Master project.
Her qualifications in human contacts, her technical support, her perspicacity, her
enthusiasm and her patience have been particularly beneficial for my progression.
The many discussions we had together were really rich and successful.
Thank also to Richard Ong for the technical support and advices on the operation of
the software used. His technical skills were always targeted and effective.
Thanks again to my colleagues of the PLAN research Group, without whom the
working days would not have been so pleasant and rewarding. Discover Calgary
and the Rockies with them was an unforgettable experience. A special thought for
Leslie, Cyril my desk neighbour, Nicola, Martine, Melania, Anshu for the many discus-
sions and advices that have enriched my stay and work.
Last but not least, I would like to thank my family for their unfailing support and en-
couragements. Finally my future husband and best partner in all my projects is infi-
nitely thanked for his love, understanding and patience. This work would not have
been conceivable without his support.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -8-
IV INTRODUCTION
Numerous topometric applications dedicated to dynamic motion, e.g. laser-
scanning or photogrammetry, need a precise location of the sensor to process data.
The precise positioning is ordinary reached by coupling satellite positioning signals
and Inertial Navigation System (INS) data. The quality of the INS data depends
strongly on the type of onboard gyroscope and accelerometer sensors. The relation
between the quality of these sensors and their cost is exponential.
The satellite positioning quality influences too the quality of the final combined posi-
tion and the improvement of his quality can be cheaper. Therefore precise satellite
positioning is investigated in this project.
Firstly, the project context is presented with the applications that motivate this work.
Then the project objectives are explained and finally the thesis outline is given.
IV.1 CONTEXT
The Positioning, Location and Navigation research group (the PLAN) from the Geo-
matics Engineering Department in the University of Calgary has developed the
PLANSoftTM software to compute precise positioning in static and dynamic motion.
Tests have already been done to assess the PLANSoftTM within the framework of skiing
applications to increase sportive performance and for vehicle to vehicle positioning
to improve the security. Relative vehicle positioning in hard conditions like in moun-
tains, urban canyon or road with overhead foliage have already been tested.
During this project the PLANSoftTM software was tested for pedestrian topometric ap-
plications. Precise positioning of pedestrians is necessary for applications such as
footpaths cartography, the creation of rapid urban maps or the localisation of pic-
tures taken by a pedestrian. For this last application, i.e. the representation of views
adapted for pedestrianized needs requests the trajectory localisation of a camera
placed on a pedestrian. By this way, views of trails observed by pedestrians could
be directly geolocated and made available in Google Street View. Indeed nowa-
days Google Map with Street View integrates only view shot from roads. From the
user point of view, it could also be interesting to dispose of views from exclusively
pedestrian passages, located in parks or in paths closed to the road traffic. The
creation of these views involves the localization of the pictures taken by pedestrians,
so the precise positioning of pedestrian‟s trajectories is required. These pedestrian
trajectories may occur in obstructed environments, where the best possible position-
ing quality should be reached.
High precise relative dynamic positioning is based on precise carrier phase observa-
tions and usually computed with double differencing process. A prerequisite for car-
rier phase positioning is the ambiguity resolution. Once the integer carrier-phase
ambiguities are fixed correctly, the carrier-phase observations are conceptually
turned into half of the phase wavelength namely sub-centimetres level of positioning
precision [Kim & Langley 2000]. This can be achieved in open sky environments using
the current GPS constellation and with low receiver dynamic motion [Ong et al
2009].
The positioning accuracy, availability and reliability depend on available satellites.
To improve the positioning quality, another satellites system, like GLONASS, can be
used by integrating GPS and GLONASS observations together. Nowadays GLONASS

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -9-
system is rebuilt thanks to important investments of the Russian government. There-
fore it becomes again relevant to investigate the use of combined GPS and GLON-
ASS systems. In May 2010, the GLONASS system offered 21 satellites available over 24
satellites composing the full operational constellation [2]. In the future, other systems,
i.e. Galileo or Compass, will provide even more satellites, which will be used to aug-
ment GPS positioning. Exploring the gain of GLONASS, particularly in congested en-
vironment, is one of the goals of this project.
IV.2 PROJECT OBJECTIVES
This project involves analysing the use of combined GPS and GLONASS signals for
precise positioning in obstructed environment.
The first goal is the understanding of the computations necessary to produce precise
positioning. The understanding of the PLANSoftTM software, in order to to relate the
post-processing performances with the different environments crossed, was first tar-
geted. A detailed study of the different parametrization of the computation and the
associated main equations is necessary. Particularly the different combinations ap-
plied to the observations used in the final computation are studied to foresee their
eventual impact on the post-processing results. Understanding the process of ambi-
guities resolution was done in details in order to assess the gain of adding GLONASS
and the impact of difficult environments. This first theoretical analysis was done in-
dependently without accessing to the PLANSoftTM code processing.
The second objective is the comprehension of the difficulties inherited from the addi-
tion of GLONASS to GPS data. The gain of combined GPS and GLONASS measure-
ments compared to GPS only in different environments is also analyzed through dif-
ferent tests conducted in real conditions.
The third goal is to study the position‟s quality reached in difficult environments, e.g.
under trees or man-made constructions like roofs. This last objective was also proc-
essed through different data sets.
The study is based on the equations used for post-processing and the analysis of ex-
perimental data. The tests were conducted in congested environments for analysing
the impact of cycle slips on ambiguities‟ resolution. The purpose of these tests is to
analyze PLANSoftTM processing performances in extreme conditions and more spe-
cifically the ambiguities resolution part. Pedestrian trajectories are less smoothed
than vehicle ones. Therefore the smoothing process of the PLANSoftTM was tested to
observe if the last is adapted to pedestrian motion. All tests have been designed in
order to experiment these project‟s objectives.
IV.3 THESIS OUTLINE
The report begins with a review of the state of the art of precise positioning with GPS
and GLONASS measurements in the chapter V STAT OF THE ART. Then the satellites
systems are presented in the first part of chapter VI PROCESSING. The global process
of the PLANSoftTM is explained in the chapter VI.2 PLANSOFTTM PROCESSING. The cor-
responding main equations are presented in this chapter VI.2.5.4 AMBIGUITIES RESO-
LUTION, including more details about the ambiguities resolution Lambda method, a
key process to reach high precision positioning. The difficulties encountered while to

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -10-
estimate a combined GPS-GLONASS solution and particularly to fix the ambiguities is
detailed in this chapter.
To compare the results and analyze them, the study and the development of statis-
tics tools are involved. They are presented in the chapter VI.3 ANALYSIS TOOLS.
Chapter VII DATA ANALYSIS presents pedestrian tests that took place in congested
environments with trees and building. Different parametrizations of the post-
processing are tested trying to highlight optimal solutions as a function of the envi-
ronment. The different computations are presented in chapter VII.1.2 GNSS PLAN-
SOFTTM DATA. Two data sets are analysed in this report. The first one contains essen-
tially parts covered by trees and is detailed in chapter VII.2 DATA SET UNDER TREES
CLOSE TO THE BOW RIVER. The second data set compare the impact of two different
obstructions: one with trees and the other one with buildings. It is detailed in chapter
VII.3 ANALYSIS OF THE INFLUENCE OF THE NATURE OF OBSTACLES OVER THE SOLUTION.
A conclusion summarizing the main results and perspectives ends the report in chap-
ter VIII CONCLUSION AND PERSPECTIVES.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -11-
V STAT OF THE ART
During this project three main elements are addressed. The first topic is the possibility
to augment GPS measurements with GLONASS data, especially to improve the am-
biguities resolution. The second element is the ability of PLANSoftTM to compute pre-
cise positions with GPS and GLONASS signals. The third one is the quality of position-
ing in obstructed environment. For each element, it sounds useful to do a short re-
view of the previous studies.
Several works have already been done on augmenting GPS measurements with
GLONASS. These researches have been undertaken especially before the year 2000,
when the potential of GLONASS was obvious and before its degradation. Comput-
ing positions with GPS and GLONASS comprises some difficulties, especially because
of the differences in signal structures between GPS and GLONASS waves. The main
difficulties in ambiguities resolution is the procedure of the ambiguity search and the
performance of the choice of the good integer ambiguities set from another candi-
date [Kim & Langley 2000]. To improve these elements different algorithms for solving
ambiguities were developed by scientists. A first and simplest technique solves am-
biguities using C/A or P code pseudoranges generally improved by a smoothing
process [Kim & Langley 2000]. A second solution uses the Ambiguity Function
Method (AFM). This algorithm is applied on only the fractional value of the instanta-
neous carrier-phase measurements to avoid degradation of the solution‟s quality
induced by cycle slips or a whole-cycle change of the carrier phase [Kim & Langley
2000]. A third class of ambiguities resolution algorithms is based on the integer least-
squares developed by Teunissen in 1993 [Kim & Langley 2000]. This last technique is
popular and is used in the PLANSoftTM processing. With GPS and GLONASS data, the
ambiguities resolution process is complicated by the frequency division multiple ac-
cess (FDMA) structure of GLONASS. A parametrization of the double differencing
equation is necessary to eliminate the GLONASS clock offset. It can‟t be eliminating
using a normal double differencing process as the phase wavelengths between di-
verse GLONASS satellites are different. The FDMA structure induces some frequency-
dependent biases resulting from inter-frequency interferences. These frequency de-
pendant biases are caused by differences in the signal acquisition between one
receiver and another. They are related to the hardware or signal processing archi-
tecture of the receiver or from temperature‟s variations [Takac & Petovello 2009].
Contrary to GPS, for GLONASS measurements these biases are different from one
satellite to another and cannot be eliminated by the double differencing process.
Because these biases are absorbed by the ambiguities resolution, they complicate
the ambiguities resolution process [Takac & Petovello 2009].
Several PLAN‟s group works have preceded the design of PLANSoftTM. One of them is
the development of a software to determine heading, pitch, and roll combining GPS
and GLONASS carrier phase and using a single differencing technique [Keong 1999].
These parameters are part of a combined GPS, GLONASS and inertial (GNSS-INS)
final solution. This work was taken over by R. Ong and implemented in the PLAN-
SoftTM. A double difference equation parametrization using dual carrier phase dou-
ble differencing is implemented in this new software. A float estimated solution is
computed using single difference between the receivers with pseudorange, phase
and Doppler measurements. The solution is then double differenced between satel-
lites to resolve the ambiguities.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -12-
As said in the introduction, these PLANSoftTM solutions have already been tested for
assessing skiing performances and for vehicle to vehicle positioning. Road tests with
receivers placed on two cars have been achieved in harsh conditions like in moun-
tains, urban canyon or road with overhead foliage. These tests have shown an ac-
curacy and availability improvement when GLONASS are added [Ong et al 2009]. In
the mountain highway, the accuracy obtained is around a horizontal Root mean
square (RMS) of 1 centimetre for a GPS-GLONASS single frequency solution [Ong et
al 2009]. In heavy overhead foliage, the solution using GPS-GLONASS dual frequency
with a L1 and L2 widelane combination provide 65% of the time sub-decimetre hori-
zontal accuracy [Ong et al 2009]. In urban canyons, the ambiguities can be re-
solved but high precision isn‟t reached. In this challenging environment, the horizon-
tal RMS of the GPS-GLONASS solution is around 10 metres with an availability of 58%
[Ong et al 2009].
In light of the tests that had already been done and of the interest in topometric
applications for tracking pedestrian, it was decided to test the quality of the PLAN-
SoftTM positioning for pedestrian applications with dynamic motion in obstructed en-
vironments.
VI PROCESSING
This chapter gives information about the satellite data used, the process of position
computation and the statistics tools employed to analyze the results‟ quality.
VI.1 SATELLITE DATA
The satellite positioning system operates with radio navigation signals emitted by
satellites. To determine a position several information are required: a time and space
reference system, measurements, correction of measurements to account for errors,
a mathematical model to estimate the final position and transformation of results to
the final geographical reference system. The GPS reference time is the Coordinated
Universal Time (UTC), time with the stability and the precision of International Atomic
Time (TAI). The geodetic reference frame is the World Geodetic System - 1984
(WGS84), a global reference ellipsoid centered in the Earth center of mass. The
WGS84 ellipsoid is described in the Earth-Centered Earth-Fixed (ECEF) Cartesian ro-
tating reference coordinate system [Kaplan & Hegarty, 2006]. The WGS84 is the
standard physical model of the Earth used for GPS applications. This Earth ellipsoid is
described by his shape, his angular velocity and the Earth mass included in it. WGS84
is also based on a detailed gravity model of the earth established thanks to multiple
measurements around the world [11]. Specific properties of the WGS84 model are
here circular cross-sections parallel to the equatorial plan with a radius equivalent of
the mean equatorial radius of the earth, and here ellipsoidal cross-sections normal to
the equator plane [Kaplan & Hegarty, 2006]. The semi major axis of this ellipsoid co-
incides with the hearth equator line, and the semi minor axis corresponds to the po-
lar diameter of the Earth. In this global geodetic reference system, the position is de-
scribed by the longitude, the latitude and the height. The position is computed by
spatial trilateration of distance between satellites and the receiver. These distances
are measured in real time thanks to the trip time of the signal. This method requires a
very precise time computation and the addition of small correction. For this purpose,
each satellite is equipped with precise atomic clock. The receiver time measure-

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -13-
ment is realized by electronic clock controlled by quartz. Each satellite transmits over
carrier wave at a specific frequency the Broadcast Ephemeris, a message contain-
ing information on satellite orbital parameters, on satellite health and clock. This sat-
ellite navigation message is decoded by the receiver. The high frequency signal
generated by the satellite as pure sinusoidal waves is modulated by a digital modu-
lation technique to carry information [Keong 1999]. The unknowns required to com-
pute the position are the receiver coordinates (longitude, latitude and height) and
the receiver clock error. This delay between receiver clock and GPS time biases is
equivalent for all measured distances, so only one receiver clock error is added. The
delay between satellite clock time and GPS time is already corrected in the naviga-
tion message. To resolve this linear and independent equations system of four un-
knowns at least four satellites are required. Depending on computation mode of the
difference, i.e static or dynamic, different combination of equations may be used,
but the basis equation used sill remains the same. In general the positioning can be
achieved using code, carrier-phase or Doppler shifts measurements [Eissfeller et al
2007]. The different types of observations and processing models are summarized in
the following:
Single point positioning applies to single receiver. The absolute positioning
contains errors like orbit errors, satellite and receiver clock errors, atmospheric
(ionospheric and tropospheric) errors, multipath and receiver noise. Different
observations can be used:
o Code phase measurements measure pseudoranges, i.e. the apparent
ranges between satellites and a receiver.
o Carrier phase measurements in unit of cycle are computed by differ-
entiating the phase of the signal generated at the receiver and the
carrier phase received from a satellite at the instant of the measure-
ment. The number of cycles (ambiguities) must be known to compute
the distance travelled by the signal between the receiver and the sat-
ellite. The precision is a few centimetres for dynamic positioning and a
few millimeters for static positioning. This method represents the most
precise solution when ambiguities are solved because carrier phase
measurements have a significantly lower noise level than the code
pseudoranges [Keong 1999].
o Carrier phase smoothed pseudoranges computes a position weighting
pseudorange and carrier phase measurements. It is based on the as-
sumption that pseudorange is robust but noisy and carrier phase is less
robust but ambiguous due to the ambiguity resolution step. The best
result is obtained by merging “absolute” pseudorange and “relative”
carrier phase. The bias between them approximates the value of the
ambiguity [Lachapelle and all, 2009]. But the problem of ambiguities
resolution remains. At the beginning of signal acquisition more weight is
given to pseudorange measurements and after some time, to the car-
rier phase measurement. If a cycle slip is detected, the weight on the
carrier phase is reset to zero. This recursive filter could be interesting for
the float ambiguity estimation phase. When ambiguities are resolved,
the carrier phase measurement is improved. This smoothing method

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -14-
leads to an horizontal error smaller than 50 centimeters [Lachapelle
and all, 2009].
Differential measurements apply to two receivers tracking satellites signals at
the same time. Assuming that errors like atmosphere, orbit errors and satellite
clock have the same effect on both receiver observations, these errors can
be removed by differentiating the observations from the two receivers. Ob-
servations used for differential positioning are code or carrier phase meas-
urements. Differential pseudorange positioning assisted with pseudorange
corrections (DGPS) reduces the horizontal error to 1 to 5 metres.
Positioning with Doppler shifts measurements is also possible. The position can
be integrated from receiver velocity computed with Doppler shift. This tech-
nique has the advantage to give a measure with low bias because it uses
relative velocities [HOW et al. 2002]. All recognized signals, even if they are
very noisy, could be used for Doppler computation, which constitutes a seri-
ous advantage compared to code positioning [Lehtinen 2001]. The problem
of this method is that achieving a continuous estimation is not possible if GPS
signal is blocked. The Doppler position computed with signal frequency shifts
and without pseudorange measurements is clearly less precise than the
pseudorange positioning [Lehtinen 2001]. Finally the Doppler positioning
could be foreseen as a considerable option for a rough positioning estimate if
the standard GPS positioning fails [Lehtinen 2001].
This computation may be done either in real-time or in post-processing mode. In or-
der to provide very precise positioning previously described observation and proc-
essing models could be combined. Different filtering techniques can also be ap-
plied, e.g. Kalman filter or least square. The quality of the measures depends on the
type of receiver, the number of tracked satellites and their geometry. The satellite
availability is the most important element to achieve good quality of positioning.
Different global satellites systems exist worldwide that can used to collect these
measurements.
VI.1.1 GLOBAL SATELLITES SYSTEMS
Global Navigation Satellites Systems (GNSS) have been developed by different
countries. The well known Global Positioning System (GPS) was the first radio-based
navigation systems providing timing and positioning services continuously. At the
time of writing, this system counts 31 satellites distributed in 6 orbits. Information
about precise satellite orbital parameters, satellite health and satellite clock are
emitted by each satellite on 2 modulations codes and soon on 4 modulations codes
transmitted on the two carrier frequencies L1 and L2 and in the future on the fre-
quency L5 too. In October 1982, the GLObal Navigation Satellite System (GLONASS)
was launched by the Russian federation. In early 1995, the system counted 24 satel-
lites. After its completion, the number of satellites in orbit decreased mainly due to
the collapse of the Russian economy, the Russian government wasn‟t able to invest
further in this technology. But at the 2005 European Navigation Conference in Mu-
nich, the Russian Federation has announced a new funding plan and the restoration

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -15-
of satellite system [Hewitson & Wang 2005]. At the time of writing 21 satellites are
available over the 24 satellites composing the full operational GLONASS constella-
tion [2]. Europe is working on Galileo, a new system comprising a constellation of 30
satellites. This development is pursued by the European Commission (EC) and the
European Space Agency (ESA). The Galileo Open service, the Public Regulated Ser-
vice and the Search and Rescue Service will be provided as of early 2014 [4]. This
system will be inter-operable with GPS and GLONASS [5]. GPS and Galileo use similar
signals and signal structures, so receiver development can be carried out similarly for
both systems [Eissfeller and all, 2008]. The arriving of the future system Galileo is par-
ticularly waited. The orbit inclination angle of GALILEO of 56° is not so different than
the GPS one to complete the constellation as GLONASS do it, but the adding of 30
satellites will efficiently improve the worldwide coverage. China has also invested in
an independent global satellite positioning system with a constellation of 25 to 35
satellites including 4 geostationary satellites named COMPASS [3]. Its CDMA signal
structure, similar to Galileo and modernized GPS, could allow interoperability be-
tween systems. COMPASS frequencies overlap Galileo‟s ones. This overlapping could
be convenient for receiver design purposes but causes problems in the case of
emergency because Europe couldn‟t jam the Chinese signal without jamming the
Galileo encrypted one [Cameron 2008]. At the current time, only 2 COMPASS satel-
lites have been launched for testing reasons [3]. While Compass would cover the
entire China and adjacent region by the end of 2010 or early 2011, its completion is
expected for 2020 [ASM, 2009]. Other systems exist like Quasi-Zenith Satellite System
(QZSS) in Japan. QZSS will be constituted by 3 geostationary satellites and will be
used as GPS system augmentation. Finally India want to develop a regionally
autonomous system named India Regional Navigational Satellite System (IRNSS). The
project, approved in 2006, is expected to be fully operational in 2012 or 2013. The
future is looking forward to a common use of the global satellites systems. In addition
to GPS signals, other GNSS information could be added to improve the final position-
ing quality. The satellite geometry and availability will be improved, especially in ob-
structed environments like urban canyons.
To improve the quality of positioning it is possible to use Satellites Based Augmenta-
tion Systems (SBAS) in a differential mode. Augmentation systems consist of a net-
work of fixed receivers located at known positions on Earth and geostationary satel-
lites. By providing additional information, this system is able to enhance the reliability
and accuracy of GNSS position estimates and corrects some errors. Depending on
the world region different official SBAS are proposed. In United States the Wide Area
Augmentation System (WAAS) is proposed. This system is expected to augment GPS
measurements, and was originally developed for civil aviation. With 38 ground sta-
tions, the goal of WAAS is to obtain at least a 7 meters horizontal and vertical accu-
racy [6]. A similar system, named European Geostationary Navigation Overlay Ser-
vice (EGNOS), was developed in Europe. Nowadays this SBAS broadcasts messages
that can enhance the accuracy, availability and integrity of GPS and GLONASS po-
sitioning and in the future Galileo. EGNOS is constituted by 34 ground stations [7].
India has developed his own SBAS too, i.e. the Indian GPS Aided Geo Augmented
Navigation (GAGAN). Finally the Japanese Multi-functional Satellite Augmentation
System (MSAS) exists for Japan.
All experiment in this research have been conducted without using an augmenta-
tion system, as the analysis focuses on the use of GLONASS and GPS signal only.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -16-
VI.1.2 GNSS ERRORS
GNSS signal is degraded at his creation by the satellite antenna, during its transmis-
sion in space and at his acquisition by the receiver.
Generating the signal generation can introduce errors in the signal due to the satel-
lite payload distortions or the antenna gain.
Then, the wave propagation in free space and in the atmosphere attenuates the
signal. The ionosphere induces a dispersive reaction in the GNSS electromagnetic
wave, that delays the propagation time of the code and pushes forward the phase
with the same amplitude. Because the induced delay is a function of the frequency
and the relation between ionospheric delay and carrier frequency is known, dual
frequencies measurements taken at different epochs allow the removal of this iono-
spheric delay by double differencing. The troposphere induces delays too. But the
troposphere environment is non dispersive and affects the different carrier frequency
equally, so double frequency method couldn‟t remove it. This delay essentially de-
pends on the troposphere pressure, relative humidity and temperature.
The local environment around the receiver can cause multipath errors due to signal
reflection or diffraction over surrounding objects like buildings, ground. This always
cause delay on the signal. A 10° elevation mask could reduce multipath effect
[Keong 1999]. The signal can also be absorbed by local obstacles like foliage.
Finally when the signal is acquired by the antenna, some interferences could cause
errors in the signal tracked. A huge variety of interferences could be received at the
same time as useful signals. Doppler effect induces errors in the measurements too.
A variation of the propagation time results from the relative motions of the satellite
and the receiver. This Doppler effect differs with code or phase measurements. To
conclude, the receiver measurement‟s noise is generated by the receiver in the
tracking loop process. It is interesting to notice that GLONASS receiver‟s noise can
be two times more important than the GPS one [Keong 1999].
To assess the quality of measurements not only accuracy and precision should be
addressed. The continuity could be affected by errors too. This continuity of the posi-
tion calculation remains fragile and can be interrupted by external causes, for ex-
ample poor reception due to parasite, storm, high humidity or ionospheric scintilla-
tions. The continuity could as well be interrupted by a change in the orientation of
the antenna causing cycle slips, a poor satellites geometry or a failure in a satellite.
To summarize, the position accuracy depends on the satellites geometry, the at-
mosphere crossed, and the local environment. Systematic errors like orbital shifts or
delays in the atomic clock, poor calibration of the receiver (or other electronic sys-
tem) could alter the measurements too.
One way to reduce some of these errors is to apply double differences on the
measurements. This step is explained in chapter III.2.5.2 INTER-STATION SINGLE-
DIFFERENCE STEP and chapter III.2.5.3 INTER SATELLITE DOUBLE-DIFFERENCE STEP.
Once a specific processing model is applied, the type of receiver and antenna has
to be considered to reduce the error. For example, antenna gain pattern has a fixed
radiation pattern shaped to reduce low elevation angle signals and decrease errors
associated with RFI and multipath [Cannon & Lachapelle 2009].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -17-
VI.1.3 GPS SPECIAL FEATURES
The GPS Navigation message is diffused by each satellite over 2 modulations codes,
C/A and P codes, and the new “C” and military codes on newer satellites. These
codes are currently transmitted on two carrier frequencies: L1 (1575.42 MHz) and L2
(1227.60 MHz), and in the future on the frequency L5 (1176.45 MHz). To differentiate
signals, each GPS satellite transmits on the same frequencies but with different rang-
ing codes from one satellite to another. These codes were selected because they
have low cross-correlation properties [Kaplan & Hegarty, 2006]. This specificity of the
signal‟s structure is called the Code Division Multiple Access (CDMA) technique. It is
used to send different signals on the same radio frequency. The modulation method
used for these basic GPS signals is the Binary Shift Phase Keying (BPSK) [Eissfeller and
all, 2008]. So each GPS satellite can be recognized thanks to its unique pseudoran-
dom noise (PRN) code transmitted with the navigation message [Takac & Petovello
2009].
GPS is first of all a military navigation system, with the risk to have a jamming signal in
crisis time, making the GPS positioning non usable. The "Selective Availability" applied
to the signal in the past was discontinued on May 2000, allowing users to receive a
non-degraded signal.
VI.1.4 GLONASS SPECIAL FEATURES
GLONASS and GPS have strong similarities in their functioning and positioning proc-
esses [Seeber 2003]. GLONASS is, like GPS, a one-way ranging system. The radio-
signal structure of both systems is very similar: two carrier signals in the L-Band, signals
modulated by two binary codes and the message. The first GLONASS satellite was
launched in 1982, several years after the first GPS satellites. Since 2001, the Russian
government has approved a long-term plan to offer again a constellation of 24 sat-
ellites [Cai & Gao 2007]. Between 2003 and 2006, 4 GLONASS-M satellites were
launched. This „Modified‟ generation supports a number of new features, such as the
satellite lifetime increased to 7 years, an improved clock stability, and a second civil
modulation on L2 signal [Cai & Gao 2007]. Operational in 2010, GLONASS-K satellites
were launched in orbits. This third generation of satellites has an increased life-time
of 10 to 12 years, and contains a third civil signal frequency [Cai & Gao 2007]. After
a latency period, the GLONASS full operational capability is planned for early 2010-
2011 [Cannon & Lachapelle 2009].
The decisive differences with GPS are the signal multiplexing technique, the different
orbital inclination angle, the time reference system and the coordinate reference
system. Another point to consider is the lack of global coverage of ground stations.
The last could cause delays in the identification of a faulty satellite and the update
of satellite data [Eissfeller et al 2007].
The GLONASS coordinate system is called Parameters of the Earth 1990 System
(PZ90). Similarly to WGS84, the PZ90 is a Earth-Centered Earth-Fixed (ECEF) terrestrial
frame, but with different parameters [Keong 1999]. GLONASS data conversions are
necessary to combine GPS and GLONASs measurements.
The GLONASS time standard is the Universal Coordinated Time of Soviet Union
(UTC_SU). UTC_SU is synchronized with the international standard of UTC within one

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -18-
microsecond. The GLONASS time (GLONASST) is based on UTC_SU standard. Due to
the location of Moscow, GLONASS has an exact offset of three hours with the
UTC_SU [Keong 1999]. This total offset of three hours must be removed from the
GLONASS time measurements to get them compatible with GPS measurements.
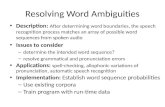
Due to the different orbital inclination angle (64.8 degrees for GLONASS compared
to 55 degrees for GPS), the dilution of precision (DOP) derived for GLONASS is better
in higher latitude geographical areas, such as in Canada, as illustrated in Figure 1.
Because of this high inclination angle, the position of the “shadow area” is slightly
different and leads to a better overall coverage worldwide [Seeber 2003].
Figure 1: PDOP value on the 17
th March 2010 around 6:30 pm given by the Russian Space
Agency [2].
GLONASS uses a frequency multiplex division access (FDMA) technique, which
means that each GLONASS satellite broadcasts its signals in slightly different fre-
quencies in the L1 and L2 frequency bands. While in GPS system, the carrier signal is
always transmitted at same frequency, the GLONASS carrier signal frequency is dis-
tributed between each satellites as follows [Seeber 2003].
The L1 frequencies are:
, (1)
where =0,…, 24 is the frequency number of satellite, has the value of 1.602 [MHz],
and worths 0.5625 [MHz].
L1 and L2 frequencies are related by
. (2)
This signal structure complicates the double frequencies computation, as we will see
in chapter III.2.5.2 INTER-STATION SINGLE-DIFFERENCE STEP in chapter III.2.5.3 INTER-
SATELLITE DOUBLE DIFFERENCE STEP. This is true especially to solve ambiguities, which

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -19-
is a key to obtain a precise positioning at the centimeter level with GPS and GLON-
ASS dynamic data [Takac & Petovello 2009]. Furthermore the FDMA structure causes
some errors in the GLONASS Receiver which dependent biases are more difficult to
remove. These biases can result from inter-frequency interferences caused by differ-
ences in signal acquisition between one receiver and another, related to the hard-
ware or signal processing architecture of the receiver or from temperature‟s varia-
tions [Takac & Petovello 2009]. For GPS measurements this frequency-dependent
biases are identical and are removed in the double-difference equation. But for
GLONASS measurements, the biases are different from one satellite to another and
cannot be canceled. The use of similar receiver type could limit the error‟s part re-
lated to the receivers. However they still have residuals receiver dependent biases
that cannot be removed, especially for real time measurements and for different
receiver brands. They cause a significant bias in the float ambiguity solution [Takac
& Petovello 2009]. Other biases could come from variations in the GLONASS phase
measurements due to FDMA structure of the receiver [Takac & Petovello 2009]. In
order to remove the error induced in the signal, special receiver calibrations could
be apply on the signal tracked time. These calibrations enable to control errors like
inter-frequency bias, atmospheric errors, and multipath. Each receiver type has its
own calibration type [Takac & Petovello 2009].
VI.2 PLANSOFTTM PROCESSING
The PLAN Group‟s PLANSoft™ processing software used for this project estimates the
receiver position and velocity by a post processing of GPS and GLONASS measure-
ments. This software processes using a double-difference method well adapted for
GPS/GLONASS real time kinematic data.
VI.2.1 THE OBSERVATIONS
The data processed are GPS and GLONASS dual frequencies measurements. Two
types of data are required: the rover data and the basis data. Using a reference
station with known coordinates, the precision of observations at the “rover points”
could be improved [Eissfeller et al 2007]. So the basis data collection was systemati-
cally done on CCIT building, which has a well known station location. For this project
tests, reference data are acquired in static for more precise positioning. Rover data
are dynamic dual frequencies measurements. For both reference and rover receiv-
ers, code pseudorange, carrier phase and Doppler measurements are acquired.
The data were collected with a NovAtel OEMV2-G GPS and GLONASS receiver and
a NovAtel GPS-702 GNSS antenna. The recording frequency was chosen to be 2
Herz. An elevation mask of 10° was systematically applied to prevent multipath er-
rors.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -20-
VI.2.2 ENTIRE PROCESS OVERVIEW
The PLANSoftTM process applies a geometry based model that uses the satellite and
receiver position in its parametrization. The double-difference method applied is
summarized in Figure 2. This methodology uses single-difference of code pseudo-
range, carrier phase and Doppler measurements to estimate the position. A float
solution is first estimated using these single-difference measurements for the position,
the velocity, the receiver clock offsets, the zenith delay (long baseline only) and the
ambiguities. The ambiguities are then estimated with the double-difference solution.
Double-difference is also applied to other float parameters. The proposed method-
ology uses a phase parametrization to solve the GLONASS ambiguities with the dou-
ble difference solution. This methodology maintains almost a complete separation
between the float and the fixed solutions [Ong et al 2010]. As used by most GNSS
receiver, the parameters are estimated by a Kalman filter with the velocity modeled
as a random walk [Lachapelle et al 2009]. Compared with least squares process, the
Kalman filter leads to smoother and better positions. But it is also proved that it in-
creases the correlation of the errors between each other [Van Diggelen 2007]. In-
deed this estimation method can reduce the success rate of the decorrelation
process of ambiguities resolution within the LAMBDA method.
A forward and reverse processing and a combination of both solutions could op-
tionally be applied. The PLANSoft™ also implements an automatic calculation of the
base station position with a single point accuracy of a few metres, it implements a
misclosure-based ambiguity validation too and an innovation-based fault detection
[Lachapelle et al 2009]. The double differencing process help to remove errors like
stratospheric on from the measurements. In addition a tropospheric correction is
applied to remove these dispersive errors. In an unbroken sequence of the satellite‟s
carrier phase observation, the carrier phase ambiguity biases all measurements [Kim
& Langley 2000]. Once the integer ambiguities are fixed correctly, the carrier phase
observations reach millimeter-level hight-precision for range measurement [Kim &
Langley 2000]. Hence the sub-centimeter-level positioning solution can theoretically
be attained [Kim & Langley 2000]. Test over the PLANSoft demonstrates that satellite-
based positioning can be achieved with sub-decimeter accuracy using fixed differ-
ential carrier phase ambiguity resolution [Ong et al 2010]. To compute coordinates
with a precision in the range of centimeter to millimeter level, sufficient changes in
the receiver-satellite geometry are necessary, e.g. one hour of data collection [Te-
unissen 2002]. Once the integer ambiguities are fixed, and no cycle slip appears, the
measurements become very precise and short observation times may be used too.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -21-
Lambda Method to estimate integer
ambiguities
Single - difference
GPS double-difference
ambiguities
PLANSoftTM Working Flowchart :
Yes
ReferenceStatic dual frequency
data
RoverStatic or
dynamic dual frequency data
Data synchronisation
Inter-station single-difference STEP
Proces
Légende
Final solution[ (x,y,z),
velocity ]
Link between stepsData
Inter-satellite double-difference STEP
“Float“ estimated Parameters
“Fixed“ solution
Least square
Kalman filter
Choice
GLONASS double-
difference ambiguities
Double - difference
Extract position
and
velocity
No
Parameters estimation
Preparation process
Choice between options
Correleted ambiguities
?
Figure 2: PLANSoft flowchart
VI.2.3 INITIALIZATION OF REQUIRED PARAMETERS WITH CODE MEASUREMENTS
Although the carrier phase is more precise, the code solution has still a role to play
[Keong 1999]. The code solution is used to determine the base station coordinate
with single point accuracy of a few meters. It is as well exploits in the integer ambigu-
ity resolution process to compute the size of the search space [Keong 1999].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -22-
The receiver position vector and receiver clock offset can be estimated with pseu-
dorange measurements. The pseudorange observation equation is [Cannon & La-
chapelle 2009]:
(3)
where is the measured pseudorange,
the geometric range ( with rs the satellite position and Rr the receive
position both in ECEF frame),
is the orbital errors,
is the speed of light,
are the satellite and receiver clock errors respectively,
is the ionospheric delay,
is the tropospheric delay,
is the error term which includes noise, multipath, ect.
The pseudorange code measurements used in the data process of this project are
from the code C/A carried on the L1 wavelength.
VI.2.4 PARAMETERS INITIALIZATION AND VELOCITY DETERMINATION WITH DOPPLER
MEASURMENTS
The satellite-receiver relative motion induces a shift in the carrier frequency received
by the receiver as its motion changes. This so called Doppler shift must be removed
from the raw measured carrier phase, to obtain correct carrier phase measurements
[Keong 1999]. The Doppler effect is used as well to compute the receiver velocity.
Beside on the use of estimating the velocity, the Doppler measurements are used to
detect cycle slip as we will see it in the chapter VI.2.5.4 AMBIGUITIES RESOLUTION.
The Doppler observation equation is [Cannon & Lachapelle 2009]:
(4)
where is the measured Doppler,
is the geometric range rate, the change in the satellite-receiver range over an in-
terval of time divided by the interval ( with the satellite velocity
and the receiver velocity both in ECEF frame),
is the orbital errors drift, is the speed of light,
are the satellite and receiver clock errors drifts respectively,
is the ionospheric delay drift,
is the tropospheric delay drift,
is the error term which includes noise, multipath, ect.
The Doppler shift is produced by the motion of the satellite with respect to the user
[Kaplan & Hegarty, 2006].
The satellite velocity computation is based on ephemeris information and an orbital
model [Kaplan & Hegarty, 2006].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -23-
At first by knowledge of the satellite position, the satellite velocity and the receiver
position from the values of the Doppler shift we can obtain the velocity of the re-
ceiver. By this velocity integration, we can reach the position of the receiver.
VI.2.5 POSITION DETERMINATION WITH CARRIER PHASE MEASURMENT
The carrier phase measurements corrected for Doppler drift are collected with the
same sampling. One carrier phase observation corresponds to the number of full
integer carrier cycles plus the fractional cycle between the satellite and the receiver
for one particular receiver at any time. This decimal number of cycles multiplied by
the wavelength of the carrier represents the spatial distance between the satellite
and the receiver. The integer number of whole cycles in the carrier transmitted from
the satellite to the receiver, named carrier phase ambiguity term, cannot be known
directly because it is impossible to distinguish between cycles. So this ambiguity term
must be estimated in a dedicated process, as we will see it in chapter VI.2.5.4 AMBI-
GUITIES RESOLUTION. Additional to the carrier phase ambiguity, the receiver coordi-
nates, and the receiver clock error must be estimated to compute a rover position
with carrier phase measurements. The carrier phase observation equation, in units of
meters, is given by [Cannon & Lachapelle 2009]:
(5)
with is the measured carrier phase,
is the geometric range ( with rs the satellite position and Rr the receiver
position both in ECEF frame),
are the orbital errors,
is the speed of light,
are the satellite and receiver clock errors respectively,
is the cycle ambiguity (integer number),
is the ionospheric delay,
is the tropospheric delay,
is the Error term which includes noise, multipath, ect.
The ionospheric delay is subtracted because the dispersive nature of the ionosphere
increases the propagation speed of the carrier [Keong 1999].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -24-
VI.2.5.1 OBSERVATION PREPARATION
Different solution types can be used in the PLANSoft process. This solution combines
the carrier phase of dual frequency observations.
For GPS and GLONASS, L1 and L2 measurements can be linearly combined to gen-
erate a new measurement [Cannon & Lachapelle 2009].
(6)
where is the new carrier phases measured,
and are the L1 and L2 carrier phase data, and are factors depending on solution‟s type.
The wave length of the new phase measurement could be computed as [Cannon &
Lachapelle 2009]:
(7)
where is the new carrier phases wave length,
is the speed of light, is the new carrier phases frequency.
The ambiguity is then combined. The combined solutions used in the PLANSoft proc-
ess are [Cannon & Lachapelle 2009]:
For L1 only, the is 1 and is 0, is 0.1903 [m] for GPS and
[m] for GLONASS (with the frequency
number of satellite), and the ambiguity is . Only L1 C/A code is used for
data processing.
For L1 and L2 ionospheric free (IF), the L1 and L2 phase solution are not com-
bined, but used separately, and a ionosphere-free strategy is applied. For L1,
the is 1 and is
, [m] for GPS, and the ambiguity is
. The L1 C/A and L2 C/A code are used for data process-
ing.
For Widelane (WL), the is 1 and is -1, is 0.8619 [m] for GPS and is
0.84 [m] for GLONASS. The ambiguity is . The L1 C/A code
only and the widelane phase are used to estimate the relative position and
widelane ambiguities.
For L1 and Widelane, the is 1 and is -1, is 0.8619 [m] for GPS and
is 0.84 [m] for GLONASS. The ambiguity estimated are and
as well.
The wideline, with its longer combined wavelength, eases the process of ambiguity
resolution. However wideline‟s errors, like ionosphere bias, multipath and noise, are
amplified [Lachapelle 2008]. The ionospheric free strategy removes ionospheric er-

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -25-
rors, and multipath and noise are less important than for widelane strategy. But the
ionospheric free (IF) ambiguities aren‟t integer. The specific combination must
be used to estimate the better integer ambiguities solution. This ionosphere free solu-
tion is efficient in the case of important difference of ionosphere errors on each fre-
quency and when integer ambiguity couldn‟t be determined [Lachapelle 2008].
VI.2.5.2 INTER-STATION SINGLE-DIFFERENCE STEP
In order to reduce the phase observations errors, double-differences technique can
be applied. The double difference carrier phase observation allows mitigating
common satellite and receiver errors like receiver and satellite clock errors [Takac &
Petovello 2009]. This technique is based on the similarity in time of errors related to
the same satellite/ receiver measurements. If we subtract instantaneous measure-
ments coming from the same satellite but tracked by two different receivers, the
satellite clock offset will be removed, as they are identical for both measurements.
The specially correlated orbital and atmospheric errors are also greatly reduced,
especially for small baseline lengths [Keong 1999]. This subtraction is called the inter-
station single difference (SD) method, see Figure 3. The same principle could be ap-
plied for instantaneous measurements from the same receiver but transmitted by
two different satellites. In this case, the receiver clock offsets are removed because
they are identical for both measurements. This method is known as the inter-satellite
double-difference (DD) (see Figure 3), because the SD results are used to apply it. As
usually known, the DD process increases errors like multipath and noise by a factor of
two [Cannon & Lachapelle 2009].
Figure 3: Double difference schema
Because of the structure‟s difference between GPS and GLONASS, the double-
difference equations are different each system.
As explained previously, all GPS carrier phase observations are transmitted over the
same carrier frequencies fL1 or fL2. First, phase measurements are used and the inter-
station single difference is applied, subtracting the measurements transmitted by the
same satellite recorded simultaneously from two different receivers [Takac & Pe-

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -26-
tovello 2009]. The single-difference can be applied to obtain float estimated pa-
rameters of the position coordinates, the velocity, the offset, the drift and the ambi-
guities. Differences between GPS and GLONASS signals complicate the ambiguity‟s
estimation step. This will be explained in the chapter VI.2.5.4 AMBIGUITIES RESOLU-
TION. Using the carrier phase with the equation (5), the DD method can be applied
on GPS data using the following equation of single difference in unit of meters [Can-
non & Lachapelle 2009]:
(8)
where is the between-receiver differencing operator.
VI.2.5.3 INTER SATELLITE DOUBLE-DIFFERENCE STEP
Then the double difference observations are computed by subtracting two inter-
station single differences for two satellites [Takac & Petovello 2009]. The following
equation is currently applied to GPS data in unit of meters [Cannon & Lachapelle
2009]:
(9)
where the between-receiver differencing operator,
the between-satellite differencing operator.
For GLONASS data, the FDMA structure (described in previous chapter) prevents
from applying equation (9) as it is. The observation equations of the double differ-
enced GPS/GLONASS carrier phase for a short baseline can be written in unit of cy-
cles as [Lachapelle and all, 2009]:
(10)
where is the double difference (DD) phase measurement, in units of cycle,
is the single-differenced (SD) range to the ith satellite,
is the wavelength of the signal from the ith satellite,
is the SD clock offset in units of distance,
is the DD ambiguity,
is the phase error term.
Because the GPS signal frequency is identical for all satellites, the term
is
null and the clock offset is eliminated. For GLONASS, the carrier signal is transmitted
at different frequencies from one satellite to another. So the GLONASS clock cannot
be removed using this equation. The phase parametrization equation can be rear-
ranged and converted to units of distance [Wang 2000].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -27-
(11)
where is the DD phase measurement [m], is the DD phase ambiguity,
is the SD phase ambiguity of the reference satellite.
The above parametrization applied to GLONASS data contains the DD range, the
DD ambiguity and the SD ambiguity of the reference satellite. The latter terms
and must be estimated separately, as it is not observable with DD measure-
ments, see the following chapter VI.2.5.4 AMBIGUITIES RESOLUTION. A double-
difference equations system is created with each phase observation, always using
the same reference satellite.
The final observation equations system must be linearized with respect to its parame-
ters. Then the unknown integer double difference ambiguities and the increments of
the unknown range component must be resolved. This system is solved by means of
a conditional compensation with a constraint on the values of the ambiguities that
should be integer values [Teunissen 1995]. The measurement model to solve appears
to be [Teunissen 1995]:
(12)
Where is the double difference observations vector, is the increments of the range components, as well named baseline components,
is the integer double difference ambiguities, is the design matrix of range components,
is the design matrix of ambiguities terms, is the non modeled error term.
This integer least-squares problem can be solved in two consecutive steps. The first
one is the resolution of the observation equations linearized removing the integer
constraint. This computation can be seen as a classical least squares compensation
to obtain the float solution
using the covariance matrix of estimated parame-
ters
[Teunissen 1995].
This float solution is then used in the second step, called the isolated ambiguities
resolution, that is detailed in chapter VI.2.5.4 AMBIGUITIES RESOLUTION.
The final fixed solution is indeed computed integrating the estimated fixed ambigui-
ties according to the following equation [Teunissen 1995]:
(13)
where is the fixed solution of range components .

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -28-
VI.2.5.4 AMBIGUITIES RESOLUTION
This step belongs to the position‟s estimation algorithm but it is more convenient to
isolate its explanation, especially because the process is different for GPS and
GLONASS.
In general the ambiguity resolution strategy involves three steps [Keong 1999, Kim &
Langley 2000]:
The ambiguity search space determination,
The integer ambiguity selection involving in two steps, the float solution and
the integer ambiguity estimation,
And finally the correct ambiguity distinction to find the fixed solution
The ambiguities resolution is based on DD carrier phase and code pseudorange
data. The goal of this step is to estimate integer phase ambiguity. The ambiguities
resolution contains two distinct steps: the inter-station single-difference (SD) and the
inter-satellite double difference (DD). In PLANSoftTM and its geometry-based observa-
tion model, a LAMBDA method followed by bootstrapping is employed to estimate
the correlated ambiguities [Ong et al 2010], see Figure 5 The positioning quality is
improved by the LAMBDA method and by searching in the m-dimensionnal ambigu-
ity space based on a geometry model [Teunissen 2002]. The LAMBDA method is fol-
lowed by a sequential search in the ambiguity space based on Ellipsoid space after
ambiguities decorrelation, and by an efficient and optimal estimator developed by
Teunissen in 1993 [Teunissen 2002].
The first step of double difference ambiguities resolution, the Inter-station single-
difference ambiguities can be summarized for two GPS satellites and two receivers
as follows [Takac & Petovello 2009]:
(14) For Satellite I,
(15) For Satellite j,
where
the ith satellite integer ambiguity for the receiver p,
is the between-receiver differencing operator.
The double-difference ambiguity cannot be estimated only with carrier phase
measurements, because the number of unknowns would be bigger than observa-
tions. [Takac & Petovello 2009]. In order to reduce the unknown number, we could
estimate the satellite reference ambiguity using pseudorange measurement. The
single-difference ambiguity of the reference satellite can be estimated by means of
the following equation [Takac & Petovello 2009]:
(16)
where ∆n is the single-difference ambiguity for the reference satellite,
∆P is the single-difference pseudorange,
∆ϕ is the single-difference phase observations.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -29-
The second step involves the Inter-satellite double-difference ambiguities involving
the following equation [Takac & Petovello 2009]:
(17)
where λ is the carrier signal wavelength.
The satellite i is the reference satellite common to all other double difference obser-
vations.
The GLONASS double-difference ambiguities resolution is more complicated be-
cause of the FDMA structure and the different λ wave lengths for all satellites. Similar
to double-difference positioning, a double difference parametrization equation is
required as follow [Takac & Petovello 2009]:
, (18)
where λ is the carrier signal wavelength,
(19).
To resolve the double-difference ambiguities, two different processes are employed
regardless of GPS or GLONASS data, but depending on their correlation nature. The
integer ambiguities search is based on sequential conditional least-squares adjusted
over the estimated ambiguities [Teunissen 1998]. The ambiguities must be resolved
by the minimization of the quadratic form of the residuals as shown on the following
equation [Teunissen 1998]:
(20)
where is the „float‟ estimated ambiguities (real-valued),
are the unknown integer ambiguities,
is the covariance matrix of estimated ambiguities .
The minimization problem is solved by searching over a smaller subset of the space
of integers Zn. In other words, we must find the vector of real integer which mini-
mizes distance to the float ambiguities estimated in metric of covariance . This
space must be centered at , and his shape and orientation is governed by [Teunissen 1997].
, (21)
where represents the search space.
This search space should be set such that it contains at least one integer vector.
This smaller subset of the integers‟ space is found using the equation (20). Once de-
veloped, this equation introduces an ellipsoidal region in Rn on which the search can
be performed. When the ambiguities are uncorrelated, is a diagonal matrix and
the ambiguity search is trivial. The minimization problem is derived as follows [Teunis-
sen 1995]:

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -30-
(22)
where
is the variance of the ith least-squares ambiguity.
By this way, the problem is reduced to resolving m separate scalar integer least-
squares problems. But when the ambiguities are correlated, it results in an inefficient
search. The ambiguity search space is very elongated. The remedy is the reduction
of the search space by transforming the original ambiguity sets into the correspond-
ing ones in a transformed space and by defining conditional search ranges in multi-
level searches [Kim & Langley 2000]. This is done by an ambiguity decorrelation with
the Least Squares AMBiguity Decorrelation Adjustment (LAMBDA) method. This inte-
ger least squares is implemented to estimate the integer ambiguity by applying an
ambiguities decorrelation and find the integer ambiguity that minimizes the distance
between this new decorreleted estimated ambiguity and the real ambiguity value.
The first step involved is a transformation of the ambiguities by decorrelation. The
ambiguities are decorrelated to obtain homogeneous spectrum of conditional
standard deviation [Teunissen 1995]. The i transformations, depending of the dimen-
sion i of the search space, modify the tangents‟ lengths of the ellipse of the search
space. For a two dimensions search space, first the horizontal tangents of the ellipse
are pushed from level toward the
level, where is the es-
timation of the conditional decorreleted ambiguities for the second dimension, and
is its corresponding standard deviation [Teunissen 1995]. Then the vertical tan-
gents of the ellipse are
pushed from from
level toward the
level,
where is the
estimation of the conditional
decorreleted ambiguities for
the vertical dimension, and
, is its corre-
sponding standard
deviation [Teunissen
1995]. The volume of
the ellipse remains fix
during this process
and the shape of
the ellipse tends to
become a sphere
shape, as illustrated in
Figure 4.
Figure 4: Diagram of ambiguities decorrelation by pusing tangents method.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -31-
This process is continued until the next transformation is reduced to the trivial identity
transformation [Teunissen 1995].
By decreasing the variance between each set of conditional least-squares of esti-
mated ambiguities, the correlations between them are automatically decreased
[Teunissen 1995]. For two-dimensional case, the full decorrelation equation is given
by [Teunissen 1995]:
(23)
and , (24)
where is the estimation of the conditional ambiguities decoreleted,
is the unknown integer ambiguities,
is the „float‟ estimated ambiguities (real-valued),
is the decorrelation matrix,
is the covariance matrix of decorreleted ambiguities,
is the covariance matrix of estimated ambiguities .
When a full decorrelation is not possible, because transformed ambiguities are not
integer, an approximate transformation with Gauss transformation is used to pre-
serve the integer nature of the ambiguities. For two-dimensional case, this decorrela-
tion equation is the following [Teunissen 1995]:
(25)
and , (26)
where is the decorrelated estimate ambiguities,
is the unknown decorrelated integer ambiguities,
is the decorrelation matrix with the
term round to the nearest integer,
is the covariance matrix of decorreleted ambiguities,
is the covariance matrix of estimated ambiguities .
Following this transformation, the spectrum of conditional standard deviation be-
comes flattened and precise and decorreleted ambiguities are returned. Thereby
the search for transformed integer ambiguity becomes easier and is performed in a
more efficient manner [Teunissen 1995].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -32-
The search space area of original and decorrelated ellipse remains the same, and
the integer nature of ambiguities is preserved.
Finally, a new integer ambiguity search is done. The fixed ambiguities can now be
estimated by the decorreleted and simplified ambiguities minimization equation as
follow [Teunissen 1995]:
(27)
where (28) is the integer bootstrapped solution estimated,
and (29),
is the integer bootstrapped solution,
is the integer ambiguity solution related to .
The ambiguities resolution is done using a minimum time to fix the ambiguities of 30
[sec], and all 30 seconds the ambiguities computation process id reset.
To conclude, using GLONASS and GPS measurements, the difficulty is to compute
the double difference for the GLONASS carrier phase. A parametrization of the
phase double difference equation is necessary to eliminate the GLONASS clock off-
sets unknowns. The analysis of ambiguities resolution techniques shows the complex-
ity of the process but it is already tested by a lot of scientists. Their multiple experi-
mentations show that to obtain optimal solutions with a least squares estimation, the
design of appropriate functional and stochastic modelling is required as with cor-
rects models, the solutions become unbiased. The distinction of a correct ambigui-
ties set from all candidates can be improved by more realistic stochastic modeling
of the receiver‟s system noise and an appropriate validation procedure of the results
[Kim & Langley 2000]. The functional model is particularly difficult to create because
some errors are correlated, e.g. ionospheric or tropospheric delays. The time correla-
tion due to high sampling rate can induce same problems [Teunissen 1997]. The sto-
chastic modeling shows also some difficulties in his optimization because of quasi-
random errors in dynamic motion like multipath, that aren‟t normally distributed [Kim
& Langley 2000]. In the numerous researches done on ambiguities resolution, func-
tional modelling received more attention than stochastic one [Kim & Langley 2000].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -33-
The entire process
of ambiguities reso-
lution applied in
PLANSoftTM is sum-
marized in Figure 5.
Figure 5: PLANSoftTM
ambiguities resolution flowchart
VI.2.5.5 RELIABILITY OF THE FIXED AMBIGUITIES FOUND
We must now evaluate the reliability of this fixed ambiguity before integrating them
or not in the final solution. Two types of tests are realized: the predict ambiguity suc-
cess rate and the F-test.
First to predict the ambiguity success rate, the performance of the integer ambiguity
chosen is evaluated using the probabilistic properties of the integer ambiguity esti-
mators [Kim & Langley 2000]. For this prediction, the probability to estimate the cor-
rect integer ambiguity is evaluated. This probability is the integral of the probability
density function over the pull-in-region of the correct integer solution [Teunissen
2002]. This pull-in-region is the area in which the float ambiguity solution is pulled to a
certain fixed solution [Teunissen 2002].
GPS double-difference ambiguities
PLANSoftTM Ambiguities resolution :
‘Float’ solution
Proces
LegendLink
between steps
Data
LAMBDA method
“Float“ estimated ambiguities
GLONASS double-difference ambiguities
Preparation process
Choice between options
Correleted ambiguities
?
‘Fixed’ solution
GLONASSGPS NN ,
Fixed ambiguities
Introduction in position double-difference equation to resolve it
Ambiguities decorrelation and estimation of integer
ambiguities by minimization
ZQZQandaZzwith
ZzzzQzz
a
T
z
T
n
z
T
z
ˆˆ
21ˆ
ˆˆ
,)ˆ()ˆ(min
GLONASSGPS NN ,
Conditional least squares
Ambiguities decorrelation and estimation of integer
ambiguities by minimization
n
n
T
nZnnnQnn ),ˆ()ˆ(min 1
ˆ
No Zes

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -34-
(30)
This computation of integer ambiguity success rate can be approximated by lower
bounds [Teunissen 2002]. The lower bound approximation used to predict the suc-
cess rate of ambiguities resolution for integer decorreleted ambiguities as given in
equation (27), is derived as follows [Teunissen, 1998]:
(31)
where is the predicted success rate,
is the unknown decorrelated integer ambiguities,
n is the number of ambiguities,
is the integral of the standard normal distribution
from – to x,
1, n].
The ambiguity success rate threshold is fixed at 90.00(%) for this project experiments.
This probability computation requires only knowledge about the variance-
covariance matrix of real-valued estimates , which could be computed prior to
the ambiguities being fixed. Another test must attest the correctness of the integer
ambiguity.
A particular form of the ratio test is applied in the PLANSoftTM, the F-test. The statistical
Fisher test assesses the global congruence of fixed ambiguities and requires tree
steps [Denli 2008, Keong 1999]:
Establish the null hypothesis,
Describe the decision rule,
Accept or reject the hypothesis
Under null hypothesis Ho, the test statistic has an F-distribution.
1. The null hypothesis is Ho:
2. The decision rule is :
(32)
with the test quantify, the total number of epoch used typically in 10 seconds, the ith residuals of each integer ambiguity,
the covariance matrix of decorreleted ambiguities.
The computation is only possible for uncorrelated measurements between
two epochs. Then it is possible to compute the common variance:
(33)
With the common variance,
and the variance of each ambiguity type.
Finally the statistic is given by:

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -35-
(34)
With the test quantify,
.
3. Ho is rejected if T > F1- => Fisher table
If Ho is rejected, the computed fixed ambiguity can‟t be used in double-
difference positioning equation.
The general ambiguity resolution process should not take more time than one epoch
to be implemented in real time. For this post treatment, the computation time
reached about 30 seconds. A misclosure threshold of 0.3 [cycles] is applied for the fix
validation phase. The general process of integer ambiguities acceptance is de-
picted in Figure 6 .
Figure 6: General process of PLANSoftTM
ambiguities resolution
Add to ‘ incorrect fixed ambiguities’ list and
don’t use it for fix solution
PLANSoftTM ambiguities processing Flowchart :
No
Proces
Légende
Link between stepsData
“Fixed“ solution
Detremine search volume of
ambiguities
Yes
Preparation process
Choice between options
The ambiguities passed the
tests?
Float ambiguities estimation
Test the potential ambiguity sets by:
- Predict success rate- F-test Add to ‘ fixed
ambiguities’ list and update the actual
used ambiguities in double difference
positioning equation
Read observation
Reset filter

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -36-
VI.2.6 CYCLE SLIP DETECTION
The signal loss causes cycle slip. Ambiguities must be re-estimated after it. The time
required to compute new fixed ambiguities affects the quality of positioning.
Cycle slip detection can be done with two methods [Cannon & Lachapelle 2009]:
The Phase Velocity Trend Method, for single frequency case using carrier
phase and Doppler measurements,
The kinematic cycle slip detection for dual frequency measurements, using
dual carrier phase measurements. This technique is more precise for very
clean data.
This second mode was applied to the data process with the PLANSoftTM, with a
phase rate cycle slip threshold of 4 [cycle].
VI.3 ANALYSIS TOOLS
In order to analyze the PLANSoftTM position computation, different statistic tools will
be used. These statistical parameters are applied to the errors related to the posi-
tions computed with the PLANSoftTM. These errors are computed by differencing the
solution with the „true coordinates‟ given by the GNSS-INS solution and converting
them into North, East, and Up errors (E, N, U). The quality of the GNSS-INS reference
data must be previously assessed.
VI.3.1 REQUIREMENTS DEFINED BY THE APPLICATION
The quality of positioning based on satellites signals must respond to specific criteri-
ons that qualify the accuracy, the precision, the integrity, the availability and the
continuity. Depending on the application domain, these criterions are more or less
demanding.
When working with measurement in static mode for surveying, high quality is re-
quired. For surveying, the accuracy and precision of data are important criterions.
Longer acquiring time is required to reach high positioning quality, that id obtained
thanks to greater measurements redundancy. In difficult environments, like in moun-
tains, in the bottom of an open-cast mine, in forests, or urban canyons, shorter
measurement periods can be problematic to track signal and reach the expected
level of accuracy and availability. But for data collected in static mode, the meas-
urement place can easily be chosen to avoid this kind of constraints due to ob-
structed environments.
For dynamic satellite positioning, obstacles are more problematic and it is more diffi-
cult to avoid a decrease of quality. A high elevation mask due to the surrounding
topography, for example trees or buildings, can prevent to successfully fix the inte-
ger carrier phase ambiguity, inhibiting high precision positioning. In motion, it is not
possible to improve the positioning quality by increasing the measurement redun-
dancy, because the receiver doesn‟t stay in the same position for a long time. A
higher frequency could help to better describe the motion, but it doesn‟t offer more
redundancy for each surveyed point. For measurements collected in dynamic
mode, the required quality‟s criterion depends on the type of motion and the appli-
cation. The pedestrian in motion needs an approximate precision of half a footstep‟s
length to distinguish a pedestrian trajectory from surroundings manmade or natural

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -37-
objects. For sportive applications, like skiing, the skiers‟ line trajectories have to be
estimated with a 10 cm accuracy level, and an accuracy of 5 cm for gate survey is
required [Lachapelle et al 2009]. For road or rail transport, the quality of positioning
doesn‟t need to be more precise than the road width, because Map matching
technique forces the trajectory to remain on the road. For maritime applications, the
quality depends on the location, more precise positioning with good reliability is
necessary in coastal and port zones. Although the accuracy‟s position is important,
the air transports need above all particularly good integrity, availability and continu-
ity.
This report studies pedestrian trajectory applications for precise positioning. The pre-
cision aimed the decimetre level to allow topometric use. To obtain precise posi-
tioning for kinematic data, differential carrier phase positioning is required. This dif-
ferential positioning must be done with a short baseline, to improve the quality of
final position computed, because errors in measurements are more similar in close
environments, and they can be removed by double differencing computation. Due
to motion and changing environments, variable multipath errors could occur. These
are more difficult to remove in dynamic mode than in static mode because there is
less redundancy to remove these errors. Finally resolving the ambiguities is essential
to reach a high precision with carrier phase data. An error of even one cycle on a
single satellite can result in a position bias of many centimetres or decimetres de-
pending on the geometry. Cycle slips, requiring new ambiguities resolution, could
occur in obstructed environments. Therefore precise dynamic positioning is espe-
cially hard to reach in obstructed environments.
For static but even more for dynamic satellite positioning, there is a huge gain to use
more satellites, because accuracy, availability and reliability depend on the amount
of available satellites. The combination of multiple satellites increases the measure-
ments redundancy, it improves the constellation geometry. Furthermore the differing
inclination angle that involves slightly different position of the “shadow area” allows
better coverage worldwide. GLONASS satellites rise in higher latitude filling better the
lack of satellites in the North direction. This ensures a better coverage for the North
hemisphere. As explained for GLONASS in chapter III.1.4 GLONASS SPECIAL FEATURES,
different orbital inclination angles exist for each satellite systems. These different an-
gles imply different dilution of precision (DOP) derived for each systems for one spe-
cific location on the Earth. These satellite systems are complementary, thus for differ-
ent location, when one solution is bad the other is better. Indeed, the gain to use
different satellites systems becomes obvious.
The addition of GLONASS is also interesting for the ambiguities resolution process. The
model, which is dependent on the satellite geometry, has a complete and direct
impact on the ambiguities variance matrices. The efficiently of the ambiguities
search depends on this because, the geometry of the search space of the fixed
ambiguities follows from these matrices [Teunissen 1997]. During the process of am-
biguities decorrelation, very small ambiguity variances of conditional least squares
allows to decrease the three large conditional variance, allowing a more efficient
search of the right integer ambiguity [Teunissen 1995]. In this way, a good satellite
redundancy allows obtaining smaller ambiguity Conditional variances. The variance
between each set of conditional least-squares of estimated ambiguities is decreas-
ing, and so the right integer ambiguity search is easier. The dual frequencies data
have the same effect. The satellite elevation has as well an impact on the ambiguity
estimates and on the location, the size and the shape of the ambiguity search

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -38-
space [Teunissen 1997]. When the satellite is in very high altitude orbit and when the
rate of data recording is high, the relative position of the satellite regarding the re-
ceiver changes slowly. As a result, the ambiguities become very poorly separable
from the baseline coordinates, and the estimated precision of the position will be
rather poor [Teunissen 1997].
With the multiple satellite systems under construction, the future promises an in-
creased satellite‟s availability, but appropriate hardware to receive the new signals
will be necessary.
If currently 24 GPS and 21 GLONASS satellites can already be used, within the next
few years, 30 Galileo satellites are expected from the EU, and 3 QZSS satellites from
Japan [Van Diggelen 2007]. Thus in a few years, we can expect at least 70 satellites
available in worldwide GNSS systems for satellite positioning. As we already have
seen it for the GPS and GLONASS combination, computing a position computation is
not always easy due to the differences between the two systems. But with appropri-
ate receiver and software, combined position will be computed using all satellites
available in the future.
VI.3.2 STATISTICS TOOLS
In order to verify the quality of the measurements different statistics tools are used.
VI.3.2.1 A PRIORI QUALITY OF COMPUTED SOLUTION
The number of available satellites and their geometry give a first quality criterion
about the computed solution. This criterion can be computed in scalar quantities,
named Dilution of Precision (DOP). These DOP are related to the volume formed by
the intersections between the receiver-satellite vectors and the unit sphere centred
on the receiver‟s location [Cannon & Lachapelle 2009]. A larger volume gives better
measures and so smaller DOP. A good DOP doesn‟t exceed 2 [Cannon & La-
chapelle 2009]. The size of these DOP‟s values depends on how many satellites are
used, and where they are in the sky. These DOP are entirely derived from the vari-
ance-covariance matrix. They depend on the User Equivalent Range Error (UERE)
associated with the standard deviation σ0 and on the observation model and its
corresponding design matrix. The covariance matrix for GNSS positioning is [Cannon
& Lachapelle 2009]:
(35)
where is the covariance matrix,
is the standard deviation of the UERE,
is the cofactor matrix,
is the design matrix of observation.
Comparing with the design matrix used for PDOP computation in the GPS only proc-
essing, the design matrix for GPS-GLONASS combination has one additional column
[Cai & Gao 2007]. This GPS-GLONASS design matrix corresponds to the unknowns of
the three position coordinates, the receiver clock offset, and the time difference
between the two systems [Cai & Gao 2007].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -39-
Several DOPs are in use depending on the geometrical plan analyzed:
The most popular parameter is the geometric dilution of precision (GDOP). It
combines the effect of satellite‟s position and error clock over the precision of
the final position solution and is computed with [Kaplan & Hegarty, 2006]:
, (36)
where is the Geometric Dilution of Precision,
is the diagonal component of the covariance matrix,
is the variance of error clock (time bias error),
is the a priori standard deviation or pseudorange error (UERE) factor .
The Position Dilution of Precision (PDOP) reflects the horizontal positioning
quality [Kaplan & Hegarty, 2006]:
(37)
where is the Position Dilution of Precision,
is the position diagonal component of the covariance matrix.
The Horizontal Dilution of Precision (HDOP) translates the horizontal positioning
quality. If the HDOP doubles, the position accuracy will get twice as bad, and
so on. [Kaplan & Hegarty, 2006]:
(38)
where is the Horizontal Dilution of Precision,
is the East and North diagonal component of the covariance matrix.
The Vertical Dilution of Precision (VDOP) reflects the horizontal positioning
quality. [Kaplan & Hegarty, 2006]:
(39)
where is the Vertical Dilution of Precision,
is the standard deviation of height.
And finally the Time Dilution of Precision (TDOP) gives the horizontal positioning
quality. [Kaplan & Hegarty, 2006]:

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -40-
(40)
where is the Time Dilution of Precision,
is the standard deviation of error clock.
VI.3.2.2 CRITERIONS TO ASSESS ACCURACY AND PRECISION
The first quality parameters to evaluate are the precision and the accuracy of the
data set. Accuracy refers to the degree of closeness to the truth value, while preci-
sion refers to the aptitude of the system to repeat its solution.
First global statistical indicators, computed for all directions East, North and Height,
are presented separately.
The mean in each direction of the data set give information about the accu-
racy of the data.
The mean of absolute values. When we compare data computing the differ-
ences using absolute values, negatives values don‟t get compensated by the
positive ones. The mean of absolute differences provides realistic analysis of
the differences in position.
The median is more robust than the mean because it is less influenced by the
different outliers. The outlier‟s computation is presented below.
The standard deviation σ informs of the dispersion of the values around the
mean. The standard deviation gives the extent, the symmetry of the data‟s
accuracy. A small standard deviation is a stability indicator.
(41)
where zi is the ith recorded measurement,
, is the mean of recorded measurement,
n is the number of recorded measurement.
The mean standard deviation of all values of standard deviation gives a good
precision criterion of the entire data set. The computation of this standard de-
viation in specific geographic areas indicates the local environmental influ-
ence.
The root mean squared error (RMS) can be described as the fluctuation of the
standard deviation around the mean. It measures the dispersion of the resid-
ual distribution frequency (the difference) between an estimator and the true
value of the estimated quantity. This statistic indicator takes the data systema-
tization into account and gives information on the accuracy and precision of
the data set [Van Diggelen 2007]:

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -41-
(42)
where zdata,i is the ith recorded measurement,
zref, i is the corresponding reference data,
n is the number of compared data.
The use of the range, the minimum and the maximum of a data set allows the
study of the dispersion and the precision. The range is sensitive to outliers. The
1st and 3rd quartiles q(25%) and q(75%)are more robust statistics, non sensitive
to outliers. The 1st quartile separates the 25 % of the lower data in which 25%
of the values are lower than q(25%). The 3rd quartile separates the 75 % of
lower data.
The outliers are computed as the values smaller than a limit value according
to the following expression:
(43)
and
(44)
where is 1st quartile and is 3rd quartile,
is the interquartile range computed as .
Thanks to the histogram of the data, the dispersion of the data and the size of
outliers can easily be visualized.
The second category of global statistics indicators is computed in the local horizon-
tal plane. For these statistics and in order to get the same level of precision for com-
parison puposes, the mean is removed from the data set to obtain a normal distribu-
tion centred in zero [Bancroft 2007]. The plots will show the errors in position in two
dimensions and the corresponding global statistic with zero mean. This allows evalu-
ating the dispersion of values around the mean. These two dimension global statis-
tics indicators are the following.
The Distance Root Mean Square (DRMS) expresses the two dimensional accu-
racy. It‟s the circular radial error computed as [Kaplan & Hegarty, 2006]:
(45)
where is the East root mean square,
is the North root mean square.
The probability that a position is within the circle of DRMS radius varies be-
tween 63.2 % and 68.3 % [Seeber 2003].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -42-
The probability that a position stays within a certain region in the plane can
be represented by a relative error ellipse. The axes of the confidence ellipse
are function of the coordinates standard deviations and the chosen level of
probability, generally the 1σ probability level corresponding to 68.3% [Seeber,
2003]. The ellipse size is described by the eigenvalues of the covariance ma-
trix, which give the axes lengths [Bancroft 2007]. Then, the orientation of the
axes in the local frame is given by the eigenvector [Ghilani & Wolf 2006]. A
translation by the mean error of the data set is applied to compensate for for
the bias in the data. Finally to obtain a 95% confidence level, the confidence
ellipse must be multiplied by a scale factor of 2.447 [Cannon & Lachapelle
2009]. The semi-major axis a2D and semi-minor axis b2D that define the relative
standard error ellipse, are given by [Chan 2010, Chrzanowski 1981, Ghilani
and Wolf 2006]:
, (46)
, (47)
where is the semi-major axis,
is the semi-minor axis,
is the East and North errors standard deviation,
is the covariance between North and East errors.
The azimuth of the semi-major axis can be computed as follows [Chan
2010], [Chrzanowski 1981], [Ghilani & Wolf 2006]:
[rad] (48)
The third category of global statistics indicators is computed in 3D: East, North and
Height components together. For this three dimensions statistics and in order to have
the same level of precision of comparison purposes, the mean was removed from
the set of data to obtain a normal distribution centred in zero [Bancroft 2007]. The
plots will show the errors in 3D in position and the corresponding global statistic with
zero mean.
The Mean Radial Spherical Error (MRSE) is the radius of the sphere centred at
the true position, containing the position estimate in three dimensions with a
probability of 61 percent [Seeber,2003]:

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -43-
(49)
The probability of a location to be within a certain region in 3D is represented
by a relative error ellipsoid, an extension into three dimensions of the error el-
lipse. The three eigenvalues of the covariance matrix give the scale factors of
the ellipsoid. The eigenvector gives the rotations applied to the three axes to
rotate the error ellipsoid into the mean errors orientation. The relative error el-
lipsoid represents the 39.4 % confidence region and is centred on the least
squares estimate of the position. When the axes lengths are multiplied by the
correct squared chi square value of 2.8, the error ellipse represents the 95%
confidence region [Cannon & Lachapelle 2009].
These statistic tools will be apply to analyze the reference‟s quality and the differ-
ences between the rover‟s solution and the last reference. These differences are
computed between the GNSS-INS data, used as reference, and the GPS/GLONASS
data processed with the PLANSoft. We assume that the GNSS errors would be re-
corded over an enough long time period to have a normal distribution. In reality
GNSS errors distribution doesn‟t behave as a normal distribution, but the Gaussian
model is a good approximation [Van Diggelen 2007]. The majority of GNSS errors like
multipath, atmospheric, and thermal noise errors aren‟t random variables and so are
non-Gaussian. But they all contribute to form a random variable in each position
axis, as far as the data set is recorded over a sufficiently long time period. According
to the central limit theorem, the sum of these random variables approximates a
Gaussian distribution [Van Diggelen 2007].
VI.3.2.3 INTEGRITY, CONTINUITY AND AVAILABILITY OF MEASURMENTS
The integrity is the measure of trust that can be placed in the correctness of the in-
formation supplied by a system. To have confidence that it is working correctly, the
ability of the system to provide position inside the truth level expected is tested.
Generally for a GNSS system, the probability that this integrity is not provided is called
the integrity risk and it is computed over a certain interval. This integrity risk translates
the fact that the positioning error remains under a certain threshold defined by an
Alarm Limit. If the errors surpass this limit, a notification must be provided within the
Time to Alarm announced [European Commission GALILEO, 2002].
The continuity is “the probability that the specified system performance will be main-
tained for the duration of a phase of operation, presuming that the system was
available at the beginning of that phase operation” [Ma 2000]. Loss of continuity
could occur because of poor geometry, planned maintenance on satellites, or such
unpredictable factors like loss of lock on one satellite. The continuity is usually de-
fined in GNSS systems by the continuity risk, the probability that the system will not
provide guidance information with the accuracy and the integrity required for the
intended operation [European Commission GALILEO, 2002].
Finally, the availability is the percentage of time during which at any location in the
coverage area, and at any time, the system is able to provide usable navigation
service [Kaplan, 2006]. During periods of non availability the integrity requirements
must still be met [European Commission GALILEO, 2002].

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -44-
In this project information about the data integrity, continuity and availability is pro-
vided by means of three tools:
The accuracy envelope is based on the software based predicted
standard deviation. The graphic, with this accuracy envelope superposed on
the coordinates, gives a first information about the data‟s integrity. Firstly, the
predicted error vector is computed as follow:
(50)
where is the predicted error with a probability of 99.7 %,
is the two dimension standard deviation predicted by the Software,
is the two dimension velocity vector for each time,
is the orthogonal projection angle.
Then, the positions of the envelope points are computed starting from the ref-
erence position:
(51)
where is the accuracy envelope,
is the GNSS-INS reference vector position,
is the predicted error with a probability of 99.7 %.
This envelope is computed in both perpendicular directions of the GNSS-INS
reference as it can be observed in the following schema in Figure 7.
Figure 7: Envelope construction schema

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -45-
This envelope is computed twice, first to estimate the reference quality and
second to estimate the correctness of the PLANSoftTM solution according to
the standard deviation estimated by the PLANSoftTM.
The Percentage of errors bigger than 10 [cm] in the horizontal plane and 20
[cm] in the vertical plane gives an overall indication about the ability of the
system to work at a precise point positioning level. This percentage reflects
the system‟s integrity and availability. The values of 10 [cm] in the horizontal
plane and 20 [cm] in the vertical plane are motivated by common require-
ments in topographical applications, e.g. to locate complementary sensors.
The percentage of fixed integer ambiguities gives overall information about
availability and continuity. This percentage is computed over the entire data
set. If ambiguities aren‟t fixed, the accuracy can not reach precise position-
ing. If the percentage of fixed ambiguities appears to be too small in a spe-
cific area, the positioning accuracy in this area is not considered as satisfac-
tory.
VII DATA ANALYSIS
Two types of data sets are analysed in this chapter. The first one allows testing the
GNSS position computed with the PLANSoftTM in trees environment. The second one
compares the impact of the same elevation mask but produced by two different
types of obstacles: some trees and a building. The data are compared with an INS-
GNSS reference.
The data analyzed, indeed the GNSS-INS data and then the PLANSoftTM GNSS posi-
tioning, are first presented. This section starts with the explanation of the different
parametrizations applied to the PLANSoftTM computations. Then the two experimen-
tal tests are presented separately comprising each time a short test description, the
quality of the reference, the presentation of the best post-processing parametriza-
tion and the main results of the statistical analysis.
The analysis of the data sets consists essentially in a statistical study. Due to the huge
disparity in the results obtained from one parametrization of PLANSoftTM computation
to another, no relevant conclusion on the choice of post-processing parametrization
can be done. In order to be able to identify which post-processing parametrization
should be chosen to achieve the best possible performances in a specific envi-
ronment more data is required achieving a statistically representative analysis.
VII.1 DATA ANALYSED
The measurements used for the analysis are the GNSS-INS reference data, and the
GNSS solution computed with the PLANSoftTM.
VII.1.1 GNSS-INS REFERENCE

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -46-
The reference positioning data are computed with INS and GPS-GLONASS meas-
urements. This INS data were collected with the SPAN HG1700 (Synchronous Position,
Attitude and Navigation) Inertial Meas-
urement unit (IMU It is a complete
GPS/INS system built into one enclosure
that contains the NovAtel OEMV-3 re-
ceiver and the Honeywell HG1700 IMU
comprised of ring laser gyros and servo
accelerometers. The gyro rate bias is 1.0
deg/hr and the accelerometer bias is
1.0 mg [9]. The dual frequency GNSS
data are collected in two different loca-
tions to allow differential positioning. The
static basis and the moving rover are
both equipped with a dual frequency
antenna NovAtel GPS-702-GG, and with
a dual frequency receiver NovAtel
OEMV2-G. The INS and GNSS data are
combined with the Inertial Explorer
NovAtel Software. A post-processing
based on a Kalman filtering is applied to
the INS and GPS-GLONASS data to pro-
vide an accurate position, velocity and
attitude solution.
Figure 8 : Data collection initialization
The data processing step includes a static coarse alignment performed at the be-
ginning and the end of the data collection. This step allows computing the INS abso-
lute orientation using precise carrier phase positioning with fixed ambiguities. This
data collection period must last a sufficiently long time to estimate the initial INS er-
rors. This initial procedure is done in a static mode and in an open sky environment
as illustrated in Figure 8.
The IMU error model chosen for the ppost-processing is the profile SPAN Ground
(AG58). GNSS positions are computed with dual frequencies carrier phase data. A
tightly coupled solution is computed in both forward and reverse directions [8]. The
two distinguished solutions are combined. Finally, a Rauch-Tung-Striebel back
smoother reduces inertial errors growth during GNSS signal losses [8].
VII.1.2 GNSS PLANSOFT DATA
The dual frequency GNSS data are recorded with a rate of 2 Hertz in two different
locations to compute a differential solution. The static basis and the moving rover
are both equipped with a dual frequency antenna NovAtel GPS-702-GG, and with a
dual frequency receiver NovAtel OEMV2-G. A static initialization step is respected
before the start of kinematic operation. During this phase, the ambiguities corre-
sponding to all visible satellites can be resolved to start the data collection with a
good quality of positioning. This phase of ambiguities initialization is usually done
though a static baseline [Teunissen 2002]. During the kinematic recording, if cycle
slip appears, ambiguities are resolved on the flight. After recording, the GNSS posi-

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -47-
tion is computed with the PLANSoft following the steps explained in the heading VI.2
PLANSOFTTM PROCESSING.
Different types of computations have been tested to find the most appropriate one
for each environment. The computations are always based on a relative positioning
with double differences. A Kalman filtering is applied to estimate the parameters.
The precision estimated a priori for the measurements are a standard deviation of
0.5 [m] for the code pseudorange, of 0.1 [m] for the Doppler and a standard devia-
tion of 0.02 [m] for the carrier phase. A 10° elevation mask is always applied to re-
move measurements from low satellites in the sky, because their data quality is de-
creased. The PDOP threshold used to estimate the variance-covariance matrix and
the position is fixed at 150 [n.u.]. And finally the detection of blunders are. The differ-
ent chosen parameters are presented in the Annex A1 and briefly in the following
lines.
1. The first computation uses carrier phase measurements of L1 wavelength only
of GPS and GLONASS to compute the position. The ambiguities are resolved
using GPS and GLONASS separately.
2. The second solution uses carrier phase measurements of L1 and L2 wave-
length of GPS only to compute the position. The ambiguities are resolved us-
ing GPS only.
3. This third solution is computed with carrier phase measurements of L1 and L2
wavelength of GPS and GLONASS. A L1 and L2 ionospheric free (IF) combina-
tion is computed for the data processing and for ambiguities resolution. The
ambiguities are resolved using GPS and GLONASS separately using the IF
combination.
4. Carrier phase measurements of L1 and L2 wavelength of GPS and GLONASS
are used to compute positions. A L1 and L2 widelane (WL) combination is
computed for the data processing and for ambiguities resolution. The ambi-
guities are resolved using GPS and GLONASS together according the WL
combination.
5. Carrier phase measurements of L1 and L2 wavelength of GPS and GLONASS
are used to compute positions. A L1 and L2 widelane (WL) combination is
computed for the data processing and for the ambiguities resolution, and a
forward and reverse solution process is applied. The ambiguities are resolved
using GPS and GLONASS together according the WL combination.
6. This computation requires GPS and GLONASS carrier phase measurements on
L1 and L2 wavelengths. A L1+widelane (WL) combination is computed for the
data processing and for the ambiguities resolution. The ambiguities are re-
solved using GPS and GLONASS together according the WL combination.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -48-
7. For this calculation only GPS and GLONASS pseudoranges are used. No car-
rier phase processing is applied.
8. This last computation needs L1 and L2 GPS and GLONASS carrier phase meas-
urements. A L1+widelane (WL) combination is computed to process the data
and solve the ambiguities.
A first analysis is systematically done on the results to compare the different pa-
rametrization‟s solutions. To underline the best result among all computations, the
color blue is used. The worst statistical result is highlighted in red as explained in the
legend below. Even if all computations are not shown in the following sections, this
color indexing is retained in the entire report. It enables to keep in mind the quality of
the solution compared to other computations that may not be exposed in the de-
tailed analysis, to keep it concise, but are available in the Appendix.
Legend: Best value
Best value more or less 1[cm]
Best value more or less 5[cm]
Worst value more or less 5[cm]
Worst value more or less 1[cm]
Worst value
Table 1: Legend of the color indexing of the statistical results.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -49-
VII.2 DATA SET UNDER TREES CLOSE TO THE BOW RIVER
This first data set was collected in the Edworthy Parc near the Bow River. It enables
different analyses like assessing the global quality of PLANSoftTM solutions in such as
environment, assessing the ambiguities resolution‟s ratio in obstructed area, the gain
of adding GLONASS and to compare the errors related to the different types of fo-
liage. After a description of the test and the reference quality, these points of ana-
lyse are addressed.
VII.2.1 TEST DESCRIPTION
The data collection‟s environment contains open sky parts and parts with more or
less dense foliage, as visible in Figure 9. At the time of the data collection, May 12th,
2010, some leaves began to be visible on trees.
Figure 9: Visualization of the data collection trajectory on Google Earth.
For the analysis, the trajectory was divided in ten areas with different type of vegeta-
tion density.
- The Area 1 is used as a reference for the analysis because it is located in an
open sky environment.
- The Area 2 strides a sparse leafed-trees sector.
- The Area 3 crosses dense leafed-trees vegetation. Because of the foliage
density many cycle slips are expected in this area.
- The Area 4 goes along a fir-trees line. At the beginning of this part, the trajec-
tory passes under a roof corresponding to an area of about 25 [m2]. This pas-
sage tests the ambiguities resolution on the flight, and the resolution time.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -50-
- In the Area 5, the trajectory penetrates in dense fir-trees vegetation. The
vegetation covers the entire area. This part contains the more extreme condi-
tion of all the data set.
- The Area 6 is similar to the area 6 with a fir-trees line in the East side of the tra-
jectory, but without going under any construction witch congests the sky visi-
bility.
Before each passage under trees, a passage in an open sky zone during 45 sec-
onds was respected ensuring enough time for the ambiguity resolution.
- The Area 7 was crossed two times. For the outward trajectory, the previous
environment was on the bridge in open sky. And for the return trajectory the
previous environment was the area 6, with a fir-trees line in the East.
Figure 10 presents the different areas used for the analysis. The areas analysed
are drawn in bright orange.
Figure 10: Distribution of the different areas of analysis on Google Earth map.
Following a satellites geometry planning, the data collection took place between
10:15 am and 11:00 am. The DOP values and the satellites availability are actually
better during that part of the day (see Figure 11 and Figure 12). The Trimble's Plan-
ning software planned this satellites geometry using the GPS and GLONASS almanac
available through Trimble website [(12) Trimble, 2010], and dates from 11th May
2010. During this period, the poorest expected PDOP value was 1.33 (Figure 11) and
the lowest satellites number was 16 (around 11:00 9 GPS and 7 GLONASS satellites).

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -51-
Figure 11: GPS and GLONASS DOP number forecast for 12
th May 2010 by Planning Soft-
ware of Trimble
Figure 12: GPS and GLONASS satellite number forecast for 12
th May 2010 by Planning
Software of Trimble.
VII.2.2 GNSS-INS REFERENCE FOR THE BOW RIVER DATA SET
The reference solution, computed with GPS-INS data, has a global mean standard
deviation (MSD) of approximately 3 centimetres in the East, the North and in the
Height coordinates (see Table 2). The best precision is reached in the open sky area
1 with a MSD in 2D (MSD2D) of 0.5 centimetres and a MSD of 0.5 centimetres in the
Height. The GNSS-INS precision is worse under the fir-trees in area 5 with a MSD2D

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -52-
frothy times bigger than in open sky area and a MSD in the Height thirty times bigger
(see Table 2).
Reference quality
Area n°
INS-GNSS solution mean Standard deviation [m]
E N H 2D
all data 0.027 0.029 0.030 0.040
1 0.003 0.004 0.005 0.005
5 0.152 0.145 0.138 0.209
Table 2: GNSS-INS reference quality estimated with Inertial Explorer Software
The MSD for all datasets and estimated with Inertial Explorer NovAtel software can
be found in the Annex 3. As visible in Figure 13, the standard deviation varies strongly
depending on the type of environment. This variation motives an analysis distinguish-
ing the areas.
Figure 13: Variation of the standard deviation of the GNSS-INS reference
These differences in the quality of the reference solution must be taken into account
to analyse the PLANSoftTM solutions. Particularly in obstructed areas, the difference
between the PLANSoft TM and the reference solutions is affected by the imprecision
of the GNSS-INS solution. But in these obstructed environment, this reference impreci-
sion is small relative to the precision of the PLANSoftTM solution, which is worse. To as-
sess the GNSS-INS internal quality the biggest difference between forward and re-
verse solutions can be used. This gives a criterion to evaluate the computation ro-
bustness. In our case this maximum separation reaches 3.6 metres under fir-trees in
the area 5. This means an important difference between the two solutions com-
puted, and explains the bad final precision of the reference in this area. Observing
the accuracy envelope, one can see that the GNSS-INS quality changes according

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -53-
to the environment. This accuracy envelope is computed with the equation (51) us-
ing the two dimensions standard deviation estimated by Inertial Explorer and the INS
velocity vector. We can observe that the precision of the data is good for the open
sky area 1 (Figure 14), and is worse for the fir-trees area 6 (Figure 15).
Figure 14: Accuracy envelope in the area 1 in Open sky, plot produced with the Software
Matlab.
Figure 15: Accuracy envelope in the area 6 with a fir-trees line on the East of the trajectory,
plot produced with the Software Matlab.
Usually we observe that after a sufficiently long transition in an open sky area the
GNSS-INS reference precision becomes better. If during a too long period of time the
ambiguities can‟t be resolved, the precision of the reference is seriously affected.
This effect is clearly visible in Figure 16. The red elements of the plot describe the posi-
tion and quality after a static period. It can be observed that the accuracy enve-

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -54-
lope is quite thin. In the second case, the return trajectory was done under the trees
without any period of open sky allowing the ambiguities resolution. The correspond-
ing envelope is larger because the accuracy is worse.
Figure 16: Changes in GNSS_INS reference quality according to the previous environment
crossed, area 5 under fir-trees, plot produced with the Software Matlab.
VII.2.3 GNSS PLANSOFT SOLUTION FOR THE BOW RIVER DATA SET
In order to define the best solutions to analyse, eight post-processing computed ac-
cording to the parametrization explained in chapter VII.1.2 GNSS PLANSOFTTM DATA
were analysed. The results of these eight computations are compared for the entire
data sets and for the seven areas, resulting in fifty five scenarios analysed. Compar-
ing these fifty five scenarios, the computations 5 and 6 give generally the best
planimetric results for the data collected under trees near the Bow River. These two
solutions use GPS and GLONASS carrier phase measurements. The computation 5 is a
forward and reverse solution applied to dual frequencies data and with L1 and L2
widelane WL combination used for the ambiguities resolution. The computation 6
uses L1 and L2 wavelengths with a L1 and WL combination. The computation pa-
rametrization choice is done comparing some statistics: the RMS, the percentage
with errors bigger than 10 [cm] in the plane and 20 [cm] in the height and the per-
centage of resolved ambiguities. This comparison process is visible in the tables in
Annexe 2 and Annexe 5.
The best positioning solution in the vertical plane is generally obtained with the
computations 2 and 6 (Annexe 2). If the data are analyzed by environment, it
emerges that in fir-trees the best solutions are estimated with the computations 5
and 6. However the data in leafed trees environment, computations 4 and 5 stand
out to deliver the best solutions. In open sky or slightly covered areas, the computa-
tions 1 and 6 provide the best results in the horizontal plane. The heights are gener-

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -55-
ally better with different computation combinations than the ones used for 2D. To
choose the processing parametrization used for the analysis, quality in the horizontal
plane prevails over the one in the altimetry.
Consequently computations 5 and 6 are used more often in the following analysis of
the PLANSoftTM solutions. In order to compare GPS only and GPS plus GLONASS solu-
tions, the computation 2 (GPS alone) and the computation 4 (GPS and GLONASS)
are compared in the following chapter VII.2.4.4 GAIN OF GNSS VERSUS GPS ALONE.
VII.2.3.1 GLOBAL QUALITY OF THE COMPUTATIONS 5 AND 6 FOR THE GLOBAL DATA SET
A global quality analysis of the computations 5 and 6 can be visualized in Table 3.
The combined forward and reverse solution does not provide very good global RMS,
especially for height coordinates. That results from the fact that a bad precision is
observed for the forward and reverse process computation 5 under the fir-trees
coverage of the area 5 (see Annexe 6). This local bad precision affects the global
quality of the entire computation 5.
The global planimetric accuracy of the data set reaches a 2DRMS of 0.554 [m] for
the computation 5 and 0.63 [m] for the computation 6. The accuracy in the height is
two times worse, with a HRMS of 1.284 [m] for the computation 5, and 0.952[m] for
the computation 6. In both cases, between 75 and 65 percent of the PLANSoftTM po-
sitions‟ errors are smaller than 10 [cm] in the horizontal plane and 20 [cm] in the ver-
tical one.
In the two solutions used for this analysis, the percentage of resolved ambiguities is
relatively high; around 85 percent of the ambiguities in these data sets are fixed.
Table 3: Global analysis of the entire data set for the computations 5 and 6.
A high percentage of resolved ambiguities should insure a good positioning accu-
racy and precision. But some time a high percentage of fixed integer ambiguity is
Co
mp
uta
tio
ns
n°
Computation parameters Analysis of difference with INS-GPS
Process Satellites
used
Phase solution
type
Percentage of fixed integer
ambiguities [%]
Estimated position RMSE accuracy [m]
Percentage with errors bigger than 10[cm] plani and
20[cm] alti[%]
E N H E N H
5
Process forward
and reverse
solu-tions
GPS and GLONASS
L1 and L2 +
wide-lane
84.3 0.447 0.328 1.284 37.6 39.5 35.9
6 GPS and
GLONASS
L1 + wide-lane
86.0 0.440 0.451 0.952 28.2 38.7 26.6

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -56-
not related to precise RMS (see Annexe 5). Indeed certain types of computation
could help to reduce errors despite the fact the ambiguities aren‟t resolved.
Despite a quite high PDOP threshold of 150, the position‟s estimation failed nine
times in the data sets. These points are located in highly obstructed locations, i.e.
under the roof and under the fir-trees.
After comparison, the entire data set of the computation 6 shows slightly better re-
sults than the computation 5. But splitting the analysis into areas, the computation 6
performs only better in more open sky areas (the numbers 1 and 2) and for areas
with fir-trees (the areas 5 and 6, see Annexe 2). Finally, because their post-processing
quality is quite similar, computations 5 and 6 will both be used for the following
analysis. As detailed earlier, for the combined forward and reverse computation 5,
different qualities are obtained depending on the surroundings obstructions. So it is
more relevant to perform the analysis area by area as strong variations in the results‟
quality can be observed depending on the environment. Therefore following analy-
sis will be done for each area.
VII.2.4 DATA ANALYSIS
The data analysis uses the statistical tools described in chapter VI.3 ANALYSIS TOOLS.
Statistic indicators are computed for each processing type (computations 1 to 8 de-
fined in chapter VII.1.2 GNSS PLANSOFTTM DATA) and for the entire data set as well as
for each area (see chapter VII.2.1 TEST DESCRIPTION). As explained in the previous
chapter, based on their identified good performances after a first analysis of all sce-
narios, the computation 5 and 6 were chosen for the analysis. The computations 2
(GPS alone) and the computation 4 (GPS and GLONASS) are used to analyse the
gain of GLONASS versus GPS alone. Based on the analysis of the entire experimental
data, major conclusions have been extracted. For the concision of the report, only
those are presented in what follows.
VII.2.4.1 INTERNAL QUALITY OF GNSS PLANSOFT DATA
The PLANSoftTM reliability envelope enables to evaluate the ability of the PLANSoftTM
to provide position within the predicted confidence interval. To be reliable, the
PLANSoftTM solution must be inside the envelope‟s contour. The envelope is com-
puted with the equation (51) , using the two dimensions standard deviation and the
velocity vector estimated by the PLANSoftTM. As explained in chapter VI.3.2.3 INTEG-
RITY, CONTINUITY AND AVAILABILITY OF MEASURMENTS, the envelope is computed
from the GNSS-INS position.
The accuracy of a solution is more difficult to estimate in obstructed environments
because in these areas the observations are less redundant degraded by multiple
losses of satellites‟ signals. In fact an estimated standard deviation computed with
fewer observations will be less significant and therefore less representative. So to see
if the accuracy of the PLANSoftTM solutions is well estimated by the PLANSoftTM, the
worst case scenarios must be analysed. Consequently obstructed areas were cho-
sen for the analysis of the reliability.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -57-
The data sets analysed are the areas 3, 4 and 6 processed with the computations 5
and 6. As it can be observed in Table 4, these solutions reflect bad conditions for
precise positioning due to the obstruction encountered, e.g. PDOP values are some-
time bigger than 2.2. In the area 4, a roof causes multiple losses of satellites‟ signals
implicating bad PDOP and a low number of satellites in certain parts of the area.
Quality of the solutions analyzed
Solutions analyzed: Comp. 5 area 3
Comp. 5 area 4
Comp. 5 area 6
Comp. 6 area 3
Comp. 6 area 4
GNSS-INS Refer-ence quality
Standard deviation σ2D [m]
0.04 0.04 0.105 0.04 0.04
Standard deviation σH [m]
0.03 0.03 0.09 0.03 0.03
A priori solution quality
PDOP (min-max) [-] 1.3 - 2.2 1.4 - 3.3 1.5 1.5 - 2.1 1.5- 23.8
Satellite number (min-max)
9 to 18 7 to 16 16 to 17 12 to 17 4 to 17
Availability and continuity of the solution
Percentage of Fixed ambiguities %
78% 83% 5% 98% 88%
Table 4: Quality of the solution analyzed for the PLANSoftTM
reliability.
In the leafed-trees dense coverage area 3, variations in the size of the reliability en-
velope can be observed. These different widths result from the fact that the trees
induce different elevation angles. They are higher in the North part of the area and
smaller in the South (down left the plots) (see also Figure 18 and Figure 19). In this
strongly congested environment, the reliability of the PLANSoftTM solutions is quite
good because the trajectory is always located inside the light-blue envelope (see
Figure 17). The larger parts of the reliability envelope translate the important differ-
ences between the PLANSoftTM solution (in blue) and the GNSS-INS reference (in red).
These differences seem to appear in the case of signal losses and faulty ambiguities
resolution in the GNSS PLANSoftTM data set.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -58-
Figure 17: PLANSoft
TM reliability envelope for the computation n°5 (combined forward and
reverse solutions) in the area 3.
Figure 18: Sky view of the trajectory in the area 3 on Google
Earth.
Figure 19 (in the right): Photo of the
obstructed environment in the area 3
in the dense part of the foliage.
For the same area 3, but for the computation 6 using L1 and L2 wavelength with a L1
and WL combination, the positions computed by the PLANSoftTM are worse esti-
mated by the software, because they are more often outside of the reliability enve-
lope. Standard deviations computed for these positions were better estimated than
with the forward and reverse computation 5. As visible in Figure 20, the GNSS PLAN-
Soft solution (in blue) exits the envelope (in light-blue). The analysis shows that the
better the solution is, the better the estimation is. And in our case, the computation 5
forward and reverse solution produces the best results in this area 3.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -59-
Figure 20: PLANSoft
TM reliability envelope with the computation 6 L1 and L2 wavelength
with a L1 and WL combination solution, in the area 3.
The availability of the PLANSoftTM solution is good also for the other obstructed pas-
sages in the area 4 near the East fir-trees line. For the computation 5, the accuracy
of the PLANSoftTM solution is correctly estimated (see Figure 21). This passage induces
cycle slips in practically all satellites signals. In the worst case, approximately in the
middle of the roof, only 5 to 4 satellites, essentially GPS, are tracked against 15 to 17
before entering the wooden construction. For this difficult area, the probability of the
bad solution location is well estimated by the PLANSoftTM.
Figure 21: PLANSoftTM
reliability envelope with the computa-
tion 5 forward and reverse solution, in the area 4.
Figure 22: Sky view of the trajectory
in the area 4 from Google Earth,
with the approximate position of the
roof.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -60-
As expected, in this difficult environment
covered with a roof, the computation 6
isn‟t always located in the reliability enve-
lope (see Figure 23). In the worst case the
solution (in blue) is 50 centimetres outside
of the reliability envelope (see Figure 23).
However the accuracy estimation of the
PLANSoftTM solution remains consistent for
this extreme case.
Figure 23: PLANSoft
TM reliability envelope with the computation 6 in the area 4.
In the area 6, near the fir-trees line in the East, the reliability of the PLANSoftTM solution
wasn‟t well estimated. The maximal distance between the solution (in blue) and the
reliability envelope reaches 25 centimetres (see Figure 24).
Figure 24: PLANSoftTM
reliability envelope with the
computation 5 forward and reverse solution, in the
area 6.
Figure 25: Sky view of the trajectory
in the area 6 on Google Earth

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -61-
On the contrary the reliability envelope fits well the PLANSoftTM solution for the com-
putation 6 using L1 and L2 wavelength with a L1 and WL combination (see Figure
26.) For this area 6, the computation 6 gives the best processing quality (see Annexe
2). This observation consolidates the conclusion stating that the quality of the accu-
racy‟s estimation depends on the quality of the computed solution, worse is the solu-
tion and worse is the accuracy estimation.
Figure 26: PLANSoft
TM reli-
ability envelope with the com-
putation 6 forward and reverse
solution, in the area 6.
Globally, there are a good agreement between the PLANSoftTM estimated position-
ing quality and the assessed accuracy even with few satellites in view. Despite the
difficulties due to the surroundings, the errors on the estimated solution don‟t exceed
0.5 meters for the computations 5 and 6. This quality estimation of PLANSoftTM solu-
tions depends on the accuracy of the solution. To estimate the global quality of the
PLANSoftTM precision estimation, assessing the mean difference between each posi-
tion and the reliability envelope could be interesting. This should be further investi-
gated.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -62-
VII.2.4.2 IMPACT OF THE AMBIGUITIES RESOLUTION
The data sets analysed are collected in the areas 4 and 7 processed with the com-
putation 5. As we can observe in Table 5 these solutions reflect bad conditions for
precise positioning, because of the encountered obstructions. In the area 4, a roof
causes multiple losses of signal implicating PDOP bigger than 2.2 and low available
satellites in certain part of the area. The receiver used is a geodetic receiver and not
a high sensitivity one. Thus, the number of satellites tracked could be increased with
aiding tracking loop techniques.
Quality of the solutions analyzed
Solutions analyzed: Comp. 5 area 4
Comp. 5 area 7
GNSS-INS Reference quality
Standard deviation σ2D [m] 0.04 0.06
Standard deviation σH [m] 0.03 0.05
A priori solution qual-ity
PDOP (min-max) [-] 1.4 - 3.3 1.3-2
Satellite number (min-max) 7 to 16 12 to 18
Availability and conti-nuity of the solution
Percentage of Fixed ambiguities % 83% 96%
Table 5: Quality of the solutions analyzed for ambiguities resolution.
The quality of the GNSS solution depends on the local environment and on the pre-
vious presence of obstructions. The precedent environment influences directly the
quality of the GNSS PLANSoftTM position. If all ambiguities are resolved after a phase
located in open sky, the position is more stable. But if previous obstructions brought
cycle slips over certain satellite‟s signals, some ambiguities may be not resolved yet.
So the effects of news cycle slips, caused by the new environment, are added to
the previous one and the quality of the new position is affected.
This situation is visible in the area 7, which is situated in the side of a fir-trees line illus-
trated in green in the Figure 27. The errors due to cycle slips are observed in the re-
turn journey depicted in brown and cyan. This return trajectory was located in trees
environments before entering this area. In the outward journey, drawn in red and
blue, the precision of the GNSS PLANSoftTM solution is better because the previous
environment corresponded to open sky.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -63-
Figure 27: Comparison of PLANSoft
TM solutions based on the environment crossed before en-
tering the anlysed area. It uses the PLANSoftTM
computation n°5 in area 7.
Different positioning qualities for practically the same satellite geometry occur sev-
eral times in the data set. In fact, with less obstruction in the preceding environment,
ambiguities are better resolved and the final position is more precise.
The passage under the 25 m2 roof in the area 4 is now analysed to assess the ambi-
guities resolution and the position‟s estimation in difficult environment. As exposed
earlier, this passage causes cycle slips in practically all satellites‟ signals. In the worst
case, approximately in the middle of the roof, only 5 to 4 satellites, essentially GPS,
are tracked against 15 to 17 before the roof site. Only two cycles slips are detected
during this passage (Annexe 4). This kinematic cycle slip detection applied appears
to underestimate the reality, because cycle slips are detected only for the satellite
number 9 and 22 for the GPS times corresponding to the time spend under the roof.
The phase rate cycle slip threshold of 4 [cycle] applied to the data set can perhaps
be increased. The errors over the GNSS PLANSoftTM position is around 1.5 [m] in the
middle of the roof. But approximately 5 meters after the roof area, the positions are
accurate again to 30 centimetres. However, until the pedestrian reaches the end of
the fir-trees line and a more open sky area, the differences between PLANSoftTM posi-
tions and the GNSS-INS reference remain close to 30 centimetres. This constant error
looks may be associated to false ambiguities resolution due to the presence of the
fir-trees line.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -64-
Figure 28: Accuracy envelope in the area 4, with a fir-trees line on the East of the trajectory,
plot using the PLANSoftTM
computation 5 forward and reverse process.
Figure 29: Sky view of the trajectory in the area
4 in Google Earth, with the approximate posi-
tion of the roof.
Figure 30: Picture of the Roof crossed.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -65-
VII.2.4.3 COMPARISON OF DIFFERENTS ENVIRONMENTS
Four different environments are compared using always the computation 6, which
uses L1 and L2 wavelength with a L1 and WL combination solution. To insure similar
satellite geometry for each data set, the data have been collected during a period
of some 15 minutes.
The first area is the open sky area 1 (see Figure 31 and Figure 32). This area is situated
in the West side of the data set.
Figure 31 : Sky view of the trajectory com-
putation 6 in the area 1 on Google Earth.
Figure 32: Picture of the open sky area 1.
The second area, used for comparison
purposes, is the sparse leafed-trees area
2 (see Figure 33, Figure 34 and Figure 35
This area allows a good visibility of satel-
lites, but some obstructions are pro-
duced by the trees boles. At the time of
the data collection no leave is present
on these trees.
Figure 33: Sky view of the trajectory
computation 6 in the area 2 on Google
Earth.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -66-
Figure 34: Picture of the sparse leafed-trees area
2, taken from the West side.
Figure 35: Picture of the sparse leafed-trees area
2, taken from the East side
The third area analyzed goes along the fir-trees line in the East side (see Figure 36
and Figure 37).
Figure 36: Sky view of the trajectory computation 6 in the area
6 on Google Earth.
Figure 37: Picture of the fir-trees
line in East side area 6.
The fourth area analyzed is situated under a dense coverage of fir-trees (see Figure
38 and Figure 39).
1 2

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -67-
Figure 38: Sky view of the trajectory computation 6 in the
area 5 on Google Earth.
Figure 39: Picture of the dense fir-trees
cover area 5.
The quality of the analyzed scenarios is presented in Table 6.
Quality of the solutions analyzed
Solutions analyzed: Comp. 6 area 1
Comp. 6 area 2
Comp. 6 area 5
Comp. 6 area 6
GNSS-INS Reference quality
Standard deviation σ2D [m] 0.005 0.009 0.21 0.06
Standard deviation σH [m] 0.005 0.008 0.14 0.05
A priori solution quality
PDOP (min-max) [-] 1.5 - 1.7 1.5 - 1.7 1.4 - 19.6 1.4 - 2.6
Satellite number (min-max) 15 to 17 13 to 17 5 to 17 10 to 17
Availability and con-tinuity of the solu-tion
Percentage of Fixed ambiguities %
100% 100% 30% 96%
Table 6: Quality of the scenarios analyzed for environments comparisons.
As expected, the satellites geometries are better for the open sky area 1 and for the
area 2 with spare trees.
The areas in open sky 1 and under sparse trees number 2 have both the maximum
percentage of ambiguities resolved (see Table 7 and Table 8). The horizontal accu-
racy is better in the open sky area with a 2DRMS of 0.05 [m] compared to a 2DRMS
of 0.06 [m] in the area 2 with sparse trees. In the altimetry, the HRMS are also better
for the open sky area 1. The accuracy reached in this area allows precise position-
ing. As visible in Table 7 and Table 8, more than 99 percent the PLANSoftTM errors are

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -68-
smaller than 10 centimetres in the horizontal plane and 20 centimetres in the height.
The PLANSoftTM solution is really very precise in open and slightly obstructed areas.
Area 4 in open sky
Co
mp
uta
tio
ns
n° PLANSoftTM parameters Analysis of difference with INS-GPS
Process Satellites
used
Phase solution
type
Percentage of fixed inte-ger ambigui-
ties [%]
Estimeted position RMSE accuracy [m]
Percentage with errors bigger than 10[cm] plani and
20[cm] alti[%]
E N H E N H
6 No
special process
GPS and GLONASS
L1 + wide-lane
100 0.025 0.038 0.067 0.00 0.00 0.00
Table 7: Statistic analysis of the area 1 in open sky for the computation 6.
Area 5 with sparse leafed-trees
Co
mp
uta
tio
ns
n° Analysis of difference with INS-GPS
Process Satellites
used
Phase solution
type
Percentage of fixed integer
ambiguities [%]
Estimeted position RMSE accuracy [m]
Percentage with errors bigger than 10[cm] plani and
20[cm] alti[%]
E N H E N H
6 No
special process
GPS and GLONASS
L1 + wide-lane
100 0.037 0.047 0.114 1.02 0.68 0.34
Table 8: Statistic analysis of the area 2 with sparse leafed-trees for the computation 6.
Some of the errors, depicted in Figure 40, in the sparse trees area 2 come from multi-
path effects, probably due to reflected signals on the surrounding boles trees. Some
differences between the PLANSoftTM solution and the INS reference come from the
lack of satellites signals too. In fact, in the open sky area 17, satellites are tracked
and arriving in the sparse trees area some positions are computed with 15, 14 and
even 13 satellites measurements. This loss of observations result in a slightly worse po-
sitioning quality in the area 2. When several signal‟s losses occur, the PLANSoftTM er-
rors still remains over several metres until the obstruction stops and the satellite signal
can be tracked again. This happens when ambiguities can‟t be fixed again and this
process can take up to 30 seconds. But usually they are resolved within a few sec-
onds. This effect will be explained in the analysis of the two following areas. In the
area 1 and 2, the cycle slips don‟t occur on enough satellite‟s signals to produce the
same effect.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -69-
Figure 40 : Zoom on the plot of the area 2 with a
possible multipath effect.
Figure 41 : Sky view of the trajectory computa-
tion 6 in the area 2 on Google Earth.
For the more open sky areas 1 and 2 the
mean standard deviations are always
smaller than 1 [cm] for each coordinate
(see Table 9). The reference precision is
good enough in this area to make analy-
sis because no inaccuracy in the refer-
ence solution may bias the analysis. Table 9: Mean standard deviation of the reference for the areas 1 and 2.
Others analysis can be done, still using the computation 6, between the two last
data sets in fir-trees environment.
By comparing these results with the previous one in open sky areas, the solutions ap-
peared to be less good. These expected results occur because of the important ob-
structions of the areas 5 and 6 situated in more dense foliage.
Open sky areas
Area n°
INS-GNSS solution mean standard deviation [m]
E N H 2D
1 0.003 0.004 0.005 0.005
2 0.005 0.008 0.008 0.009

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -70-
Area 9 with sparse a fir-trees line in the East C
om
pu
tati
on
s n
°
Analysis of difference with INS-GPS
Process Satellites
used
Phase solu-tion type
Per-centage of fixed integer ambi-guities
[%]
Estimeted position RMSE accuracy [m]
Percentage with errors bigger than 10[cm] plani and
20[cm] alti[%]
E N H E N H
6 No
special process
GPS and GLONASS
L1 + wide-lane
10.8 0.350 0.611 1.647 82.2 98.1 100
Table 10: Statistic analysis of the area 6 with the fir-trees line in East for the computation 6.
The computation 6 gives especially good results for the area 5 compared with other
computations.
Area 7 with dense fire-trees coverage
Co
mp
uta
tio
ns
n°
Analysis of difference with INS-GPS
Process Satellites
used
Phase solu-tion type
Per-centage of fixed integer ambi-guities
[%]
Estimeted position RMSE accuracy [m]
Percentage with errors bigger than 10[cm] plani and
20[cm] alti[%]
E N H E N H
6 No
special process
GPS and GLONASS
L1 + wide-lane
29.7 1.146 1.052 2.678 80.3 80.5 88.1
Table 11: Statistic analysis of the area 5 with dense fir-trees coverage for the computation 6
The two data sets in areas 5 and 6 have a small percentage of resolved ambiguities,
certainly because of the numerous obstacles.
The errors are very dispersed in both data sets, especially in the area 5 (see Figure 42
and Figure 43). The PLANSoftTM positions are better in the area 6 (see Figure 44 and
Figure 45). This area is approximately exposed to forty percent of open sky, whereas
the area 5 is totally covered. In this both areas, errors result from small multipath ef-
fect or signal absorption by the foliage of the fir-trees. But the biggest errors are cre-
ated by the multiple cycle slips because of loss of signal.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -71-
Figure 42: Histogram of
the data computation 6
in the area 6.
Figure 43: Histogram of the
data computation 6 in the area
5.
Figure 44: 3D error ellipsoid represent-
ing 95% confidence region with of the
computation 6 in the area 6 with trees
line in the East side.
Figure 45: 3D error ellipsoid representing 95% confi-
dence region of the same data but in the area 5 under fir-
trees.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -72-
The number of satellites used to compute the positions varies strongly in the area 5 of
dense foliage. As a consequence the DOP varies strongly too (see Figure 47).
Figure 46: Satellites geometry and errors on the position for the computation 6 in the area 6..
Figure 47: Satellites geometry and errors on the position for the computation 6 in the area 5.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -73-
The quality of the reference is not excellent in these two areas, particularly in the
area 5. The 2DRMS of the area 5 reaches 0.21 [m]. As it can be seen in Figure 48, the
maximal standard deviation of the reference reaches 42 centimetres. This inaccu-
racy of the reference solution must be considered in the analysis. The GPS-GLONASS
solution computed with the NovAtel software Inertial Explorer without a combination
with INS data is not as good as the PLANSoftTM solution. So the poor performances of
the GPS-INS reference can be attributed to the inaccuracy of GNSS only positions.
Fir-trees areas
Area n°
INS-GNSS solution mean Stan-dard deviation [m]
E N H 2D
5 0.152 0.145 0.138 0.209
6 0.068 0.080 0.086 0.105
Table 12: Mean standard deviation of the reference for the areas 5 and 6.
Figure 48: Evolution of the standard deviation estimated by Inertial Explorer in the area 5.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -74-
VII.2.4.4 GAIN OF GNSS VERSUS GPS ALONE
The comparison of the performances with and without GLONASS was done with the
computation 2 (GPS alone) and the computation 4 (GPS and GLONASS). These two
processing use both dual frequencies measurements and do not combine forward
and reverse solutions. Except the addition of GLONASS observations for the compu-
tation 4, another difference distinguishes the two computations. A different combi-
nation of observations is applied at each computation. The computation 2 has a L1
and L2 ionospheric free (IF) combination. The computation 4 has a widelane (WL)
computation using L1 and L2 observations. But this difference of combinations hasn‟t
a capital influence in the results.
The scenarios analysed are the open sky area 1 and the dense leafed-trees foliage
area 3. The main initial conditions, which influence the quality of these scenarios, are
presented in the Table 13. As expected, the PDOP are bigger for the computation 2
using only GPS measurements. The percentage of ambiguities resolved is worse in
the area 3 because of the trees presence.
Quality of the solutions analyzed
Solutions analyzed: Comp. 2 area 1
Comp. 4 area 1
Comp. 2 area 3
Comp. 4 area 3
GNSS-INS Refer-ence quality
Standard deviation σ2D [m] 0.005 0.005 0.04 0.04
Standard deviation σH [m] 0.005 0.005 0.03 0.03
A priori solution quality
PDOP (min-max) [-] 1.7 - 2.08 1.5 - 1.7 1.8 - 3.3 1.5 - 2.1
Satellite number (min-max) 9 to 11 15 to 17 8 to 11 12 to 17
Availability and continuity of the solution
Percentage of Fixed ambiguities %
100% 100% 79% 69%
Table 13: Scenarios analyzed to see the gain of GLONASS.
In the open sky area 1, the benefit of GLONASS augmentation in the horizontal
plane is not really visible (see Table 14). However in the altimetry plan, the GPS
computation 2 offers results more precise of 1 centimetre.
Co
mp
uta
tio
ns
n° Analysis of difference with INS-GPS
Satellites
used
Phase solu-
tion type
Percent-
age of
fixed
integer
ambigui-
ties [%]
Estimeted position
RMSE accuracy [m]
Percentage with
errors bigger than
10[cm] plani and
20[cm] alti[%]
E N H E N H
2 GPS L1 and L2 100 0.025 0.039 0.064 0 0 0
4 GPS and
GLONASS
L1 and L2
+widelane 100 0.026 0.038 0.075 0 0 24
Table 14: Statistic analysis of the area 1 in open sky for the computations 2 and 4.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -75-
By comparing the histo-
grams of the computa-
tions 2 (GPS alone) and 4
(GPS and GLONASS), the
gain thanks to GLONASS
augmentation isn‟t rele-
vant in this open sky area
1 (see Figure 49 and Figure
50).
Figure 49: Histogram of the data computation 2 (GPS alone)
in the open sky area 1.
Figure 50: Histogram of the data computation 4 in the open
sky area 1.
However in the leafed-trees area 3, the gain of GLONASS augmentation is clearly
visible. The numerous obstructions have less impact if more signals can be used to
estimate a solution. This is explained by the fact that the probability of tracking ob-
structed signals is reduced. However the percentage of resolved ambiguities is
smaller for the GPS-GLONASS computation 4 as visible in Table 15. But the better
accuracy in the horizontal plane in the GPS-GLONASS computation 4 confirms the
gain of GLONASS augmentation. The 2DRMS is 1.15 [m] for the computation 2 (GPS
only) and 0.81 [m] for the computation 4 (GPS-GLONASS). The altimetric solutions
have a similar accuracy.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -76-
Co
mp
uta
tio
ns
n°
Analysis of difference with INS-GPS
Satellites
used
Phase so-
lution type
Per-
centage
of fixed
integer
ambigui-
ties [%]
Estimeted position
RMSE accuracy [m]
Percentage with
errors bigger than
10[cm] plani and
20[cm] alti[%]
E N H E N H
2 GPS L1 and L2 78.57 0.695 0.910 0.466 71.83 69.44 41.27
4
GPS and
GLON-
ASS
L1 and L2
+widelane 68.65 0.437 0.686 0.462 65.48 73.81 60.32
Table 15: Statistic analysis of the area 3 under leafed-trees for the computations 2 and 4.
Comparing Figure 51 and Figure 52, it is clear that DOP values are smaller for the
GPS-GLONASS computation 4. The number of satellites visible by the receiver in-
creases with the addition of the GLONASS satellites. As a result, the errors on the posi-
tion decrease for the GPS-GLONASS computation 4.
Figure 51: Satellites geometry and errors on the position for the computation 2 (GPS only) in
the area 3.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -77-
Figure 52: Satellites geometry and errors on the position for the computation 4(GPS and
GLONASS) in the area 3.
The 3D error ellipsoid of the GPS only computation 2 is slightly bigger than the one for
the GPS-GLONASS computation (see Figure 51 and Figure 52).
The histogram of the GPS only computation 2 shows a larger errors dispersion along
the East and North coordinates, with a bigger standard deviation (see Figure 53 and
Figure 54). This reflects the important errors impacting certain positions when less sat-
ellite are tracked.
Figure 53: Histogram of the computation 2 (GPS only) in the area 3.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -78-
Figure 54: Histogram of the computation 4 (GPS-GLONASS) in the area 3.
Previous studies on the PLANSoftTM computation have demonstrated that in all of the
visibility condition tested, GLONASS augmentation with the fix of GLONASS ambigui-
ties improve both the overall rate of correct fix and the rate of detection for incor-
rect fix [Ong et al 2010]. So, as a consequence the position‟s quality must be im-
proved too. The present study demonstrates above all that the GLONASS added
value is more important in obstructed zones compared to open areas. In open ar-
eas, the gain of GLONASS is less visible. The same conclusion can be done for all kind
of GNSS augmentation.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -79-
VII.3 ANALYSIS OF THE INFLUENCE OF THE NATURE OF OBSTACLES OVER THE SO-
LUTION
The two following data sets were collected in order to compare the effect of the
nature of surrounding obstructions on the position‟s estimation.
VII.3.1 TEST DESCRIPTION
This data set is composed of one part located along a line of trees and a second
part located along the CCIT building in the University of Calgary (see Figure 55 and
Figure 56). The obstruction mask of 60° is identical for the two datasets and was
measured with a clinometer. The period of time between the two data sets is 1 hour.
Therefore the satellite constellation can be considered as identical for both experi-
ments. Each data collection has lasted approximately 7 minutes.
Figure 55: Picture of the straight trajectory fol-
lowing the road side nearby the trees line.
Figure 56: Picture of the straight trajectory fol-
lowing the road side nearby the building.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -80-
VII.3.1.1 GNSS_INS REFERENCE FOR THE TREES AND BUILDING DATA SET
As exposed in the Table 16, the reference position precision reaches 7 millimetres in
the three axis directions for the area with a trees line obstruction. The reference posi-
tion precision of the building line area is worst. It reaches approximately 4 centime-
tres.
Quality of the solutions analysed
Solutions analysed: Comp. 4 trees line
obstruction Comp. 4 building
obstruction
GNSS-INS Refer-ence quality
Standard deviation σ2D [m] 0,009 0,062
Standard deviation σH [m] 0,007 0,041
Table 16: Statistic analysis of the area with trees line obstruction and of the area with the
building obstruction for the computation 4.
The trajectory near the trees line couldn‟t be computed with a combined forward
and reverse solution because a problem occurred in the data collection. However,
the environment is clear enough to compute a good reference solution based on
the forward only solution. This is visible in table 16.
VII.3.2 GNSS PLANSOFTTM SOLUTION FOR THE TREES AND BUILDING DATA SET
After a comparison of all computation parametrization, the computation 4 provides
good results for both areas. It is not the only good one, but this computation has a
solution of constant quality for both areas. Therefore, this computation is chosen for
the analysis.
The initial conditions of the PLANSoftTM computations 4 are presented for the two
areas compared in the following table 17. The PDOP of the trees line area are less
dispersed and smaller than for the second area. The number of available satellites
used for the PLANSoftTM computations is smaller for the building obstruction area.
And the percentage of ambiguities resolved is quite pore in this building area.
Quality of the solutions analysed
Solutions analysed: Comp. 4 trees line
obstruction Comp. 4 building
obstruction
Apriori solution quality
PDOP (min-max) [-] 1.3 - 2.35 1.22 - 5.13
Satellite number (min-max) 10 to 12 6 to 12
Availability and continuity of the solution
Percentage of fixed ambigui-ties %
100% 15%
Table 17: Statistic analysis of the area with trees line obstruction and of the area with
the building obstruction for the computation 4.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -81-
VII.3.3 DATA ANALYSIS
A first comparison is done with one of the best PLANSoftTM post-processing, the com-
putation 4 using dual frequencies GPS and GLONASS measurements with a free
ionospheric computation. Only for the building obstacle, the quality of the INS-GNSS
reference seems to be worse than the one from PLANSoftTM. The INS-GNSS positions,
computed with the NovAtel software Inertial Explorer, are more dispersed (see Figure
57 and Figure 59). The true trajectory was straight but it isn‟t the case for the INS-
GNSS data depicted in red in the following plots. Contrary the PLANSoftTM solution
follows a straight trajectory
Figure 57: Magnification of a part of the trajec-
tory calculated with the 60° building elevation
mask using the data computation 4.
Figure 58: Sky view of the corresponding refer-
ence trajectory on Google Earth.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -82-
Figure 59: Magnification of the trajec-
tory with the 60° building, elevation
mask using the computation 4.
The quality of the combined INS-GNSS
solution is certainly affected by the poor quality of the GNSS only solution computed
by Inertial Explorer (see Figure 60). It is interesting to notice that he NovAtel Software
GNSS solution is not as good as the PLANSoftTM GNSS solution. With a dispersion
around 3.5 meters on each side of the true trajectory, this Inertial Explorer GNSS solu-
tionis not so precise than the PLANSoft one.
Figure 60: Plot of the GNSS solution produced with Inertial Explorer.
Scale 5 [m]

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -83-
The poor quality of the reference occurs
only near the building with an elevation
mask of 60°. Along the trees line, the
reference solution is better (see Figure
61).
Figure 61: Plot of the trajectory with the
60° trees line elevation mask using the
data computation number 4.
As for the PLANSoftTM GNSS solution, the Inertial Explorer GNSS solution is computed
with a double differencing method, including a troposphere correction.
Because more multipath is expected from the building‟s obstacle than the trees line,
improved blunder detection in PLANSoftTM might explain why the last provide more
accurate results than the GNSS-INS. The NovAtel software might be not rejecting too
many observations as the PLANSoftTM does it and computes them again until obtain-
ing better residuals. The PLANSoftTM process could better remove these multipath
errors. To verify this hypothesis, the number of measurements should be increased in
order to augment the statistical signification of the experimental results. In the future,
it would be interesting to redo these tests using a more reliable reference, e.g. using
a theodolite. A multipath detection test could be added in the PLANSoftTM software.
This detection could be done by comparing each new computed position with the
previous position. If the distance between the satellite and the receiver is abnormally
bigger compared with the previous distance, a multipath effect may be identified.
The detection threshold would then be a sensitive parameter to adjust for multipath
detection. This threshold corresponds to the maximal accepted difference between
two positions and it would depend on the data sampling rate.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -84-
VIII CONCLUSION AND PERSPECTIVES
All analyses are based on the PLANSoftTM software solution. This software was devel-
oped in the PLAN research group essentially to perform dynamic precise positioning.
The flexibility of PLANSoftTM enables to use different measurements and different
measurements combination in order to achieve the best possible navigation solu-
tion. This software provides many outputs that help to understand the results. The
output files provide also all necessary information on the reliability of the computa-
tion. These reliability indicators are given for each GPS time and they consist in the
estimated standard deviations, the number of fixed ambiguities, the results of the
two tests that verify the reliability of the ambiguities, as explained in chapter VI.2.5.5
RELIABILITY OF THE FIXED AMBIGUITIES FOUND the predicted ambiguity success rate
and the ratio of the F-test.
As a first conclusion, the analysis based on the envelope of the reliability plots has
shown that globally the position estimated with PLANSoftTM is accurate even if only a
few satellites are in view. Secondly the quality estimation in PLANSoftTM depends on
the accuracy of the solution itself.
A key element to obtain precise satellite positioning is to use carrier phase meas-
urements and therefore to resolve ambiguities. However in congested environment,
cycle slips prevent from continuously tracking signals, introducing new unknown in-
teger number of whole cycles. Such new carrier phase ambiguity terms must be
computed to allow precise positioning again. From the previous statistical analysis it
can be concluded that the nature of the environment that precedes an obstructed
area has a strong impact on the quality of the final navigation solution. As described
in chapter VII.2.4.2 IMPACT OF THE AMBIGUITIES RESOLUTION the success rate of the
ambiguity resolution depends on the history of resolved ambiguities and thus on the
previous environment crossed. Indeed, if obstructed environments must be surveyed
during a data collection, good quality of position can be reached only if the ambi-
guities were resolved in the previous environment, which is generally an open sky
one. Facing this conclusion, it is important to plan ahead the trajectory taking the
surrounding obstructions and the open sky areas into account. Using an airborne
photography can help to visualize and understand the environment targeted for the
data collection.
Because the ambiguity resolution step and the signal losses effect the position com-
puted with the carrier phase measurements, very precise positioning is difficult to
achieve in obstructed environments. Errors can easily reach 1 metre or even more in
these difficult areas. But the analysis conducted in this research demonstrated that
the PLANSoftTM often performs as well as the GNSS-INS solution. For dynamic applica-
tions, in a lot of the different areas analysed, the use of GPS and GLONASS meas-
urements combined is accurate enough. For precise positioning at the decimetre
level in open sky and in lightly obstructed areas, the PLANSoftTM GLONASS-GPS posi-
tioning provide the same performance level as the GNSS-INS post-processed with
Inertial Explorer software. It is astonishing to see that even in obstructed environ-
ments, the PLANSoftTM GLONASS-GPS provides good results too. The good quality
level of the navigation solution and the reduced cost of this solution, i.e. the ab-
sence of additional INS sensors, stimulate the use of this method even in motion.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -85-
The analysis concludes that the GLONASS gain is more relevant in obstructed envi-
ronments, like with trees and buildings, than in open sky environment as the satellite
geometry is improved. The probability to track more signals is obviously improved by
adding GLONASS satellites. In open sky area too the addition of GLONASS satellites
increases the measurements redundancy. However as detailed in section VII.2.4.4
GAIN OF GNSS VERSUS GPS ALONE, measurements with GPS only provide already
enough redundant observations to ensure a precise position. Overall the different
orbital inclination angles (64.8 degrees for GLONASS compared to 55 degrees for
GPS) make the two different satellites systems complementary and improve the
worldwide coverage. As a consequence, often extremely bad DOP values are less
observed with combined GPS and GLONASS measurements. The worldwide cover-
age is improved also because with the different orbite inclination, the distribution of
the satellites in the sky is optimized. Because of the higher inclination angle, the lack
of satellites in the North direction is better filled in places like Canada. As seen in the
chapter VI.3.1 REQUIREMENTS DEFINED BY THE THE APPLICATION, the addition of
GLONASS is also interesting for the ambiguity resolution process. The model, which
depends on the satellite geometry, has a complete and direct impact on the co-
variance matrix of the ambiguities. The efficiently of the ambiguities search depends
on this because the geometry of the search space for the fixed ambiguities follows
from these matrices [Teunissen 1997]. In the future multiple satellite systems can be
used to augment GPS measurements, increasing the redundancy in the data and
the reliability of the positioning. With the use on multiple satellite systems, the satellite
geometry and availability will be improved, especially in obstructed environments
like in urban canyons or near dense vegetation coverage.
While looking for the best possible PLANSoftTM solution, different settings for the post-
processing have been highlighted. The combined reverse and forward solution with
dual frequency GPS and GLONASS data (computation 5) gives especially good re-
sults, with some exceptions in very congested environments. Computation 4, using
dual frequency GPS and GLONASS data with a computation combination of L1 and
L2 widelane, produces good solutions too. The third parametrization chosen for the
analysis is the computation 6 that uses L1 and L2 carrier phase from GPS and GLON-
ASS satellites, with a combination of L1 and widelane. However it is difficult to estab-
lish a direct relationship between the parametrization and the type of environments.
As seen in chapter VII.2.4.3 COMPARISON OF DIFFERENT ENVIRONMENTS, from one
site to another the best possible computation changes, even if the type of environ-
ment is composed of the same kind of trees. From one solution to another the suc-
cess rate of the ambiguity resolution changes rapidly. It would be interesting to in-
vestigate this element more deeply. Whether some computation types are more
appropriate for certain kinds of environment, the nature of the obstructions could
become a new parameter to add in the software. Therefore doing tests to compare
the impact of the nature of obstacles with similar elevation masks could be relevant.
This was started in the last tests. However the duration of the data sets should be
longer to increase the statistical significance.
This resolution of the ambiguity parameters is based on least squares estimation. The
way to obtain optimal solutions is an appropriate functional and stochastic model-
ling. Using GLONASS and GPS measurements, the difficulty is to compute the double
difference for the GLONASS carrier phase. A parametrization of the phase double
difference equation is necessary to eliminate the GLONASS clock offset unknowns.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -86-
Finally the objectives of the project are well carried out. The understanding of the
computation wasn‟t sufficient for relating the effect of the different environments
with the parametrization of the post-processing. This happened due to the poor re-
dundancy of available data for the analysis. The difficulties to augment GPS data
with GLONASS measurements were studied in depth and the gain was analysed in
different tests. Through these tests, the study of the positioning quality in difficult envi-
ronments was well assessed. Achieved statistical results are surprisingly good even
though the environments tested were extreme.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -87-
IX TABLES DES ILLUSTRATIONS
IX.1 TABLE OF FIGURES:
Figure 1: PDOP value on the 17th March 2010 around 6:30 pm given by the Russian
Space Agency [2]. ................................................................................................................ 18 Figure 2: PLANSoft flowchart ................................................................................................ 21 Figure 3: Double difference schema .................................................................................. 25 Figure 4: Diagram of ambiguities decorrelation by pusing tangents method. ............ 30 Figure 5: PLANSoftTM ambiguities resolution flowchart ...................................................... 33 Figure 6: General process of PLANSoftTM ambiguities resolution ..................................... 35 Figure 7: Envelope construction schema ........................................................................... 44 Figure 8 : Data collection initialization ................................................................................ 46 Figure 9: Visualization of the data collection trajectory on Google Earth. ................... 49 Figure 10: Distribution of the different areas of analysis on Google Earth map. .......... 50 Figure 11: GPS and GLONASS DOP number forecast for 12th May 2010 by Planning
Software of Trimble ................................................................................................................ 51 Figure 12: GPS and GLONASS satellite number forecast for 12th May 2010 by Planning
Software of Trimble. ............................................................................................................... 51 Figure 13: Variation of the standard deviation of the GNSS-INS reference .................. 52 Figure 14: Accuracy envelope in the area 1 in Open sky, plot produced with the
Software Matlab. ................................................................................................................... 53 Figure 15: Accuracy envelope in the area 6 with a fir-trees line on the East of the
trajectory, plot produced with the Software Matlab. ...................................................... 53 Figure 16: Changes in GNSS_INS reference quality according to the previous
environment crossed, area 5 under fir-trees, plot produced with the Software
Matlab. .................................................................................................................................... 54 Figure 17: PLANSoftTM reliability envelope for the computation n°5 (combined
forward and reverse solutions) in the area 3. .................................................................... 58 Figure 18: Sky view of the trajectory in the area 3 on Google Earth. ............................. 58 Figure 19 (in the right): Photo of the obstructed environment in the area 3 in the
dense part of the foliage. .................................................................................................... 58 Figure 20: PLANSoftTM reliability envelope with the computation 6 L1 and L2
wavelength with a L1 and WL combination solution, in the area 3............................... 59 Figure 21: PLANSoftTM reliability envelope with the computation 5 forward and
reverse solution, in the area 4. ............................................................................................. 59 Figure 22: Sky view of the trajectory in the area 4 from Google Earth, with the
approximate position of the roof. ....................................................................................... 59 Figure 23: PLANSoftTM reliability envelope with the computation 6 in the area 4. ....... 60 Figure 24: PLANSoft
TM reliability envelope with the computation 5 forward and reverse solution, in
the area 6. .................................................................................................................................. 60 Figure 25: Sky view of the trajectory in the area 6 on Google Earth .............................. 60 Figure 26: PLANSoft
TM reliability envelope with the computation 6 forward and reverse solution, in
the area 6. .................................................................................................................................. 61
Figure 27: Comparison of PLANSoftTM solutions based on the environment crossed
before entering the anlysed area. It uses the PLANSoftTM computation n°5 in area 7.
.................................................................................................................................................. 63 Figure 28: Accuracy envelope in the area 4, with a fir-trees line on the East of the
trajectory, plot using the PLANSoftTM computation 5 forward and reverse process. ... 64

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -88-
Figure 29: Sky view of the trajectory in the area 4 in Google Earth, with the
approximate position of the roof. ....................................................................................... 64 Figure 30: Picture of the Roof crossed. ............................................................................... 64 Figure 31 : Sky view of the trajectory computation 6 in the area 1 on Google Earth. 65 Figure 32: Picture of the open sky area 1. .......................................................................... 65 Figure 33: Sky view of the trajectory computation 6 in the area 2 on Google Earth. . 65 Figure 34: Picture of the sparse leafed-trees area 2, taken from the West side. .......... 66 Figure 35: Picture of the sparse leafed-trees area 2, taken from the East side ............ 66 Figure 36: Sky view of the trajectory computation 6 in the area 6 on Google Earth. . 66 Figure 37: Picture of the fir-trees line in East side area 6. ................................................. 66 Figure 38: Sky view of the trajectory computation 6 in the area 5 on Google Earth. . 67 Figure 39: Picture of the dense fir-trees cover area 5. ..................................................... 67 Figure 40 : Zoom on the plot of the area 2 with a possible multipath effect. ............... 69 Figure 41 : Sky view of the trajectory computation 6 in the area 2 on Google Earth. 69 Figure 42: Histogram of the data computation 6 in the area 6. ..................................... 71 Figure 43: Histogram of the data computation 6 in the area 5. ..................................... 71 Figure 44: 3D error ellipsoid representing 95% confidence region with of the
computation 6 in the area 6 with trees line in the East side. ........................................... 71 Figure 45: 3D error ellipsoid representing 95% confidence region of the same data
but in the area 5 under fir-trees. .......................................................................................... 71 Figure 46: Satellites geometry and errors on the position for the computation 6 in the
area 6.. .................................................................................................................................... 72 Figure 47: Satellites geometry and errors on the position for the computation 6 in the
area 5. ..................................................................................................................................... 72 Figure 48: Evolution of the standard deviation estimated by Inertial Explorer in the
area 5. ..................................................................................................................................... 73 Figure 49: Histogram of the data computation 2 (GPS alone) in the open sky area 1. ..................... 75
Figure 50: Histogram of the data computation 4 in the open sky area 1. .................... 75 Figure 51: Satellites geometry and errors on the position for the computation 2 (GPS
only) in the area 3. ................................................................................................................ 76 Figure 52: Satellites geometry and errors on the position for the computation 4(GPS
and GLONASS) in the area 3. .............................................................................................. 77 Figure 53: Histogram of the computation 2 (GPS only) in the area 3. ........................... 77 Figure 54: Histogram of the computation 4 (GPS-GLONASS) in the area 3. ................. 78 Figure 55: Picture of the straight trajectory following the road side nearby the trees
line. .......................................................................................................................................... 79 Figure 56: Picture of the straight trajectory following the road side nearby the
building. .................................................................................................................................. 79 Figure 57: Magnification of a part of the trajectory calculated with the 60° building
elevation mask using the data computation 4................................................................. 81 Figure 58: Sky view of the corresponding reference trajectory on Google Earth. ....... 81 Figure 59: Magnification of the trajectory with the 60° building, elevation mask using
the computation 4. ............................................................................................................... 82 Figure 60: Plot of the GNSS solution produced with Inertial Explorer. ............................. 82 Figure 61: Plot of the trajectory with the 60° trees line elevation mask using the data
computation number 4. ....................................................................................................... 83

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -89-
REFERENCES
ASM (2009), „Compass Due Next Year‟, Asian Surveying and Mapping, 1st may 2009
http://www.asmmag.com/news/compass-due-next-year; last accessed May 4th
2010.
BANCROFT J. (2007), “A STUDY OF ACCURACY METRICS”, ENGO 585 – Wireless Loca-
tion, Literature Review, April 3rd 2007
CAI, C. and GAO Y. (2007), “Precise Point Positioning Using Combined GPS and
GLONASS Observations‟, in Journal of Global Positioning Systems, Vol.6, No.1:13-22,
2007
CAMERON, A. (2008), “The System: A Healthy Constellation; Galileo, Compass on
Collision Course”, GPS World, 1st April 2008
CANNON, M.E. and LACHAPELLE G. (2009), Satellite Positioning, ENGO 465 lecture
notes, Department of Geomatics Engineering, University of Calgary, Canada, Winter
2009
CHAN, B. (2010), Lab1 Satellite Positioning, ENGO465 lecture notes, Department of
Geomatics Engineering, University of Calgary, Canada, 19 Jan 2010
CHRZANOWSKI, A. (1981), „Optimization of the Breakthrough Accuracy in Tunnelling
Surveys‟, Department of Surveying Engineering, University of New Brunswick, Can-
ada, 1981
DENLI, H.H. (2008), “Stable point research on deformation networks”, Survey Review,
vol 40, N°307, Janvier 2008
EISSFELLER, B., AMERES G., KROPP V., SANROMA D. (2007), “Performance of GPS,
GLONASS and Galileo”, Munich Satellite Navigation, 2007
http://www.ifp.uni-stuttgart.de/publications/phowo07/220Eissfeller.pdf; last ac-
cessed May 6th 2010
ESA and Commission Européenne (2002), Galileo Le programme européen de navi-
gation par satellite, publications of ESA
European Commission GALILEO (2002), Mission Requirements Document, Technical
Report Issue 5.0, October 25th 2002.
GHILANI, C. D. and WOLF P. (2006), Adjustment computations; Spatial data analysis
fourth edition, Wiley, New Jersey
HEWITSON, S. and WANG J. (2005), “GNSS receiver autonomous integrity monitoring
(RAIM) performance analysis”, GPS Solution (2006), p.155-170, 16 Dec 2005
HOW, J., POHLMAN N., and PARK C. (2002), “GPS Estimation Algorithms for Precise
Velocity, Slip and Race-track Position Measurements”, 02MSEC-93, Massachusetts
Institute of Technology, Cambridge

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -90-
KAPLAN, E. D. and HEGARTY C. J. (2006), Understanding GPS, Principles and Applica-
tions 2nd edition, Artech House, Inc., Norwood
KEONG, J. (1999), “Determining Heading and Pitch using a Single Difference
GPS/GLONASS Approach”, MSc Thesis, Department of Geomatics Engineering, Uni-
versity of Calgary, Canada (Available at http://plan.geomatics.ucalgary.ca)
KEONG, J. H., and LACHAPELLE G. (2000) “Heading and Pitch Using a Single Differ-
ence GPS/GLONASS Approach”, GPS Solutions, 3, 3, 26-36.
KIM, D., R. B. Langley (2000), “GPS Ambiguity Resolution and Validation: Methodolo-
gies, Trends and Issues”, in the 7th GNSS Workshop - International Symposium on
GPS/GNSS, Nov. 30-Dec. 2, Seoul, Korea
(available at http://gauss.gge.unb.ca/papers.pdf/gnss2000.kim.pdf last accessed
May 7th 2010)
LACHAPELLE, G., MORRISON A., and ONG R., (2009) “Ultra-Precise Sport Positioning
for Sport Applications”, in Proceedings of 13th International Association of Institutes
of Navigation, 27-30 Oct, Stockholm, 11 pages.
LACHAPELLE, G. (2008), Advanced GNSS Theory And Applications, ENGO 625 lecture
notes, Department of Geomatics Engineering, University of Calgary, Canada, Fall
2008
LEHTINEN, A. (2001), “Doppler positioning with GPS”, MSc Thesis, Tampere University
of technology, Department of Electrical Engineering, October 2001
http://math.tut.fi/posgroup/DopplerPositioningwithGPS.pdf; last accessed May 4th
2010.
Ma, J. (2000), “Space Eye-Famous Satellite Telemetry Expert Chen Fangyun,” in Col-
lection of Literary Biographies of Chinese National Defense Science and Technology
Scientists, Beijing, China: People‟s Liberation Army Publishing House
NovAtel (2003), „GPS Position Accuracy Measures‟, APN-029 Rev1, dec 2003
ONG, R. B., PETOVELLO M. G. and LACHAPELLE G. (2010) “Reliability of Ambiguity
Resolution Using GPS and GLONASS”, in proceedings of ION ITM 2010, 25-27 January,
Session C1, San Diego, CA 16, U.S. Institute of navigation
ONG, R.B., PETOVELLO M. and LACHAPELLE G. (2009) “Assessment of GPS/GLONASS
RTK Under a Variety of Operational Conditions”, in Proceedings of GNSS09, 22-25
Sep, Savannah, GA, Session F6a, The Institute of Navigation, 12 pp.
SEEBER, Günter (2003), Satellite Geodesy 2nd Edition, Walter de Gruyter, New York
TAKAC, F. and PETOVELLO M. (2009). “GLONASS inter-frequency biases and ambigu-
ity resolution”, in Inside GNSS, vol. 2, no. 4, March/April 2009, pp. 24-28.
TEUNISSEN, P.J.G (2002),“Interger Least-Squares”, in processings of V Hotine-Marussi
Symposium on Mathematical Geodesy, in book International Association of Geod-

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -91-
esy Symposia Volume 127, 17-21 June, Matera (Italy), pp 69-78, ed., F. Sanso,
Springer, New York, 2004
http://books.google.ca/books?id=eSA8dYqC5nwC&pg=PA149&dq=Teunissen,+1993
&cd=1#v=onepage&q=Teunissen%2C%201993&f=false; last accessed May 5th 2010.
TEUNISSEN, P. J. G. (1998), “Success probability of integer GPS ambiguity rounding
and bootstrapping”, in Journal of Geodesy, vol. 72, no. 10, pp. 606-612.
TEUNISSEN, P. J. G. (1997), “GPS ambiguity resolution: impact of time correlation,
cross-correlation and satellite elevation dependence”, in Studia Geophysica et
Geodaetica, vol 41, no 2, pp 181-195.
Available on http://www.springerlink.com/content/w86p050404u7h504/fulltext.pdf
last accessed May 10th 2010.
TSUJII, T., HARIGAE M., INAGAKI T., and KANAI T. (2000), “Flight tests of GPS/GLONASS
precise positioning versus dual frequency KGPS profile”, in Earth Planets Space, 52, p.
825–829, 2000
VAN DIGGELEN, F. (2007), “GNSS Accuracy: Lies, Damn Lies, and Statistics”, in GPS
World, 1st jan 2007, pp.17-21
INTERNET REFERENCES:
[1] SHORTIS, M., JONES N.(1999), „Survey Networks Lecture Notes‟, Department of
Geomatics, University of Melbourne Australia, 1999
http://www.geom.unimelb.edu.au/nicole/surveynetworks/02a/02a.html; last ac-
cessed March 4th 2010.
[2] Russian Spatial Agency, Information and analytical centre:
http://www.glonass-ianc.rsa.ru; last accessed May 7th 2010.
[3] Chinese Defence web site and COMPASS information:
http://www.sinodefence.com/space/spacecraft/beidou2.asp; last accessed March
29th 2010.
[4] European Commission, Enterprise and Industry; information about Galieo
http://ec.europa.eu/enterprise/policies/space/galileo/index_en.htm; last accessed
March 29th 2010.
[5] Europe‟s satellite navigation systems:
http://www.satellite-navigation.eu/; last accessed March 29th 2010.
[6] Federal Aviation Administration and his Navigation Services like WAAS:
http://www.faa.gov/; last accessed March 29th 2010.
[7] Centre National d‟Etudes Spatiales (CNES); information about EGNOS and Gali-
leo: http://www.cnes.fr; last accessed April 2th 2010.
[8] Inetrial Explorer NovAtel Software information:

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -92-
https://www.navtechgps.com/Downloads/IMU_Brochure.pdf; last accessed May 3th
2010.
[9] Inertial measurement unit information:
http://www.honeywell.com; last accessed May 4th 2010.
And
http://www51.honeywell.com/aero/common/documents/myaerospacecatalog-
documents/Missiles-Munitions/HG1700_Inertial_Measurement_Unit.pdf; last accessed
May 4th 2010.
[10] WGS 84 information: http://earth-info.nga.mil/GandG/wgs84/gravitymod/index.html; last accessed May
4th 2010.
[11] WGS 84 information:
http://www.dqts.net/wgs84.htm; last accessed May 4th 2010.
[12] TRIMBLE web site with information about GLONASS satellites geometry, and the
GPS and GLONASS Almanac. Available on:
http://www.trimble.com/gpsdataresources.shtml last accessed May 11th 2010.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -93-
X ANNEXES OF COMPUTATIONS:
Annexe 1:
Scen
ario
n°
Short definition of the scenarios
General processing options Phase processing op-
tions
Computation Satellites Phase
Filter used
Blunder detection
process or speci-
ality
Satelites used
Phase solution
type
Ambiguities type fixed
1 Kalman
filter
yes level 0.1
%
GPS and GLONASS
L1 GLONASS and GPS separatly
G-G L1 G and G separetly
2 Kalman
filter
yes level 0.1
% GPS L1 and L2
GPS sepa-ratly
GPS L1+L2
3 Kalman
filter
yes level 0.1
%
GPS and GLONASS
L1 and L2 GLONASS and GPS separatly
G-G L1 and L2 G and G separetly
4 Kalman
filter
yes level 0.1
%
GPS and GLONASS
L1 and L2 +widelane
GLONASS and GPS together
G-G L1 and L2 G and G together
5 Kalman
filter
yes level 0.1
%
Process forward and re-verse
solutions
GPS and GLONASS
L1 and L2 +widelane
GLONASS and GPS together
G-G L1 and L2+widelane G and G together proc-ess foward and reverse
solutions
6 Kalman
filter
yes level 0.1
%
GPS and GLONASS
L1 + wide-lane
GLONASS and GPS together
G-G L1+widelane G and G together
7 Kalman
filter
yes level 0.1
%
GPS and GLONASS
no carrier phase proc-essing
G-G code only
8 Kalman
filter
yes level 0.1
% GPS
L1 + wide-lane
GPS sepa-ratly
GPS L1

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -94-
Annexe 2:
All areas
Area n°
Better PLANSoft solution
E N H
1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
all data
2 1 3 4 3 4 2 3 4
3 2 4 3 4 3 2 2 3 4
1 4 3 2 1 4 1 1 1 3 4 2 1 3 4 1 2
2 1 4 1 1 2 3 3 1 1 4 2 1 2 4 1 1 1 3
4 1 3 2 4 4 2 4 3
5 3 2 4 1 3 4 2 1 4 3
9 3 4 4 3 2 3 2 4
6 2 3 4 4 2 1 3 4 2
8 2 4 3 2 3 4 1 4 3
7 4 3 4 3 2 4 3 2
To-tal
11 7 0 13 24 23 7 13 12 4 0 17 34 18 0 5 6 24 0 13 14 24 0 8
Fir-trees areas
Area n°
Better PLANSoft solution
E N H
1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
4 1 3 2 4 4 2 4 3
5 3 2 4 1 3 4 2 1 4 3
9 3 4 4 3 2 3 2 4
6 2 3 4 4 2 1 3 4 2
7 4 3 4 3 2 4 3 2
To-tal
4 0 0 5 11 10 4 9 8 0 0 3 15 9 0 3 1 11 0 9 9 14 0 0
Leafed-trees areas
Area n°
Better PLANSoft solution
E N H
1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
3 2 4 3 4 3 2 2 3 4
8 2 4 3 2 3 4 1 4 3
To-tal
0 0 0 4 8 3 3 0 0 2 0 7 7 3 0 0 0 2 0 3 4 4 0 3

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -95-
Open sky areas
Area n°
Better PLANSoft solution
E N H
1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
1 4 3 2 1 4 1 1 1 3 4 2 1 3 4 1 2
2 1 4 1 1 2 3 3 1 1 4 2 1 2 4 1 1 1 3
To-tal
5 7 0 3 2 6 0 4 4 2 0 4 8 4 0 2 5 8 0 1 1 2 0 5
Final results
Better PLANSoft solution
E N H
1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
Legend
4 1stbetter solution
Computation type with the bigger number of good quality solution
3 2nd better solution
2 3rd better solution
2nd Computation type with the big-ger number of good quality solu-
tion
1 4th better solution
The areas 8 and 9 are not analysed in the rapport, but it is relevant to take
them in account for a global analysis. The area 8 is situated near a leafed-
trees line in the North direction. The area 9 contains two lines of fir-trees in East
and West sides.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -96-
Annexe 3: Reference quality in the Bow River data set
All areas Legend
Area n° INS-GNSS solution Standard deviation [m]
Best value
E N H 2D
all data 0.0272 0.0293 0.0297 0.04
Best value more or less 5[mm]
Fir-trees areas
Best value more or less 2[cm]
Area n° INS-GNSS solution Standard deviation [m]
E N H 2D
Worst value more or less 2[cm]
6 0.0266 0.0305 0.0322 0.0404
7 0.1516 0.1445 0.1383 0.2094
Worst value more or less 5[mm] 8 0.0209 0.0245 0.025 0.0322
9 0.0676 0.0802 0.0863 0.1049
Worst value
11 0.0381 0.0491 0.0512 0.0622
Leafed-trees areas
Area n° INS-GNSS solution Standard deviation [m]
E N H 2D
3 0.0254 0.0286 0.0295 0.0383
10 0.0376 0.048 0.0503 0.061
Open sky areas
Area n° INS-GNSS solution Standard deviation [m]
E N H 2D
4 0.0028 0.0041 0.0049 0.0049
5 0.0054 0.0076 0.0082 0.0093

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -97-
Annexe 4:
Number of cycle slips detected in the entire data set for the computation
number 6 using L1 and L2 wavelength with a L1 and WL combination solution.
Two cycles slips are detected in the time of going under the roof. This cycle
slips are detected on for the satellite number 9 and 22.

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -98-
Annexe 5: Summary of the quality analysis for the entire Bow River data set
Scen
ario
n°
Computation parameters Analysis of difference with INS-GPS
Process Satel-lites used
Phase solution
type
Ambiguities type fixed
Percentage of fixed integer
ambiguities [%]
Estimeted position RMSE accuracy [m]
Percentage with er-rors bigger than
10[cm] plani and 20[cm] alti[%]
X Y Z X Y Z
1 GPS and GLON-
ASS L1
GLONASS and GPS separatly
71.76 0.448 0.486 1.076 35.94 47.60 39.67
2 GPS L1 and
L2 GPS sepa-
ratly 77.23 0.506 0.696 0.966 31.46 41.98 28.86
3 GPS and GLON-
ASS
L1 and L2
GLONASS and GPS separatly
"unable to compute"
4 GPS and GLON-
ASS
L1 and L2
+widelane
GLONASS and GPS together
83.84 0.457 0.390 1.190 35.90 39.37 31.47
5
Process forward
and reverse
solu-tions
GPS and GLON-
ASS
L1 and L2
+widelane
GLONASS and GPS together
84.26 0.447 0.328 1.284 37.57 39.53 35.90
6 GPS and GLON-
ASS
L1 + wide-lane
GLONASS and GPS together
86.02 0.440 0.451 0.952 28.18 38.66 26.64
7 GPS and GLON-
ASS
no car-rier
phase process-
ing
0.00 0.522 0.589 1.231 77.66 83.51 78.64
8 GPS L1 +
wide-lane
GPS sepa-ratly
83.23 0.537 0.556 1.243 33.58 44.59 32.98

PLAN GROUP– Master Project Leïla Kleiner June 2010
Final report_23June2010 -99-
Annexe 6:
Sc
enar
io n
°
Analysis of difference with INS-GPS
Process Satellites
used Phase so-
lution type
Percentage of fixed integer
ambiguities [%]
Estimeted position RMSE accuracy [m]
Percentage with errors bigger than 10[cm] plani and
20[cm] alti[%]
E N H E N H
1 GPS and
GLONASS L1 7,12 1,135 1,039 2,765 87,96 90,69 98,18
2 GPS L1 and L2 9,52 1,294 1,847 2,363 92,49 91,03 95,05
3 GPS and
GLONASS L1 and L2 "unable to compute"
4 GPS and
GLONASS L1 and L2 +widelane
26,64 1,186 0,829 3,362 83,39 81,93 92,34
5
Process forward
and reverse
solutions
GPS and GLONASS
L1 and L2 +widelane
26,64 1,249 0,640 3,683 84,67 82,30 100,00
6 GPS and
GLONASS L1 + wide-
lane 29,74 1,146 1,052 2,678 80,29 80,47 88,14
7 GPS and
GLONASS
no carrier phase
processing 0,00 1,126 1,104 2,818 89,05 91,61 97,81
8 GPS L1 + wide-
lane 19,74 1,182 1,179 3,099 85,56 87,75 89,95
Top Related