





Languages
Pages
Legal

7/29/2019 2011 AIM ED 03 Theofilis Notes
1/45
ADVANCED INSTABILITY METHODS (AIM)- EDUCATION 1sp
7/29/2019 2011 AIM ED 03 Theofilis Notes
2/45
7/29/2019 2011 AIM ED 03 Theofilis Notes
3/45
ADVANCED INSTABILITY METHODS(AIM) - EDUCATION
International Graduate School on Stability,Transition to Turbulence and Flow Control
Vassilis TheofilisSchool of Aerospace Engineering, Universidad Politecnica de Madrid, Pza. CardenalCisneros 3, E-28040 Madrid, Spain
7/29/2019 2011 AIM ED 03 Theofilis Notes
4/45
7/29/2019 2011 AIM ED 03 Theofilis Notes
5/45
CONTENTS
1 Numerical Methods for Linear Instability Analysis 1
1.1 Introduction - The full picture 1
1.2 Local theory: the LNSE in 1D 4
1.2.1 The Orr-Sommerfeld equation 5
1.2.2 The Rayleigh equation 5
1.2.3 Physical interpretation 5
1.3 Numerical solution of the 1D EVP 7
1.3.1 The need for accuracy 7
1.4 The PSE 8
1.5 Global theory: the LNSE in 2D 9
1.5.1 The (direct) BiGlobal EVP 9
1.5.2 The adjoint BiGlobal EVP 10
1.5.3 The 2D Helmholtz EVP 11
1.6 Numerical solution of the 2D EVP 111.6.1 Matrix-forming or Time-stepping 11
1.6.2 The Kronecker product 11
1.6.3 On the sparsity patterns in global instability analysis 12
1.6.4 On iterative solutions of the EVP - the Arnoldi algorithm 13
1.6.5 The linear algebra work 13
1.7 The PSE-3D 13
v
7/29/2019 2011 AIM ED 03 Theofilis Notes
6/45
vi CONTENTS
1.8 Global theory: the LNSE in 3D 14
1.8.1 The TriGlobal EVP 14
1.8.2 The 3D Helmholtz EVP 14
2 Numerical Solution Methods 17
2.1 Spatial discretization 17
2.1.1 Collocation solution of linear differential operators 17
2.1.2 Spectral Collocation 18
2.1.3 The FD-q high-order finite-difference method [22] 25
3 Results 29
3.1 LNSE in 1D: The Plane Poiseuille Flow 29
3.1.1 Tutorial Exercise I 30
3.2 LNSE in 2D: Preliminaries - the 2D Helmholtz EVP 303.2.1 Tutorial Exercise II 30
3.3 LNSE in 2D: The BiGlobal eigenvalue problem 30
3.4 The PSE-3D 31
3.5 LNSE in 3D: Preliminaries - the 3D Helmholtz EVP 31
References 37
7/29/2019 2011 AIM ED 03 Theofilis Notes
7/45
CHAPTER 1
NUMERICAL METHODS FOR LINEARINSTABILITY ANALYSIS
1.1 INTRODUCTION - THE FULL PICTURE
A short reminder of theoretical concepts underlying global linear instability analysis isnecessary in order to set the scene for the discussion that follows. Our concern is with the
development in time and space of small-amplitude perturbations superposed upon a given
laminar flow. This can be described exactly by the linearized Navier-Stokes, continuity
and energy equations, without the need to invoke the parallel (or weakly-non-parallel) flow
assumption: the flow analyzed with respect to its global stability may be any laminar two-
or three-dimensional solution of the equations of motion, as well as flows with strong
dependence on two inhomogeneous- and weakly varying along the third spatial direction.
The respective theoretical concepts are referred to as BiGlobal, TriGlobal and PSE-3D
analyses. Table 1.1. classifies and refines the different kinds of linear stability theory,
demarcating the boundaries between local analysis based on variants of the Orr-Sommerfeld
equation (OSE), non-local analysis based on the standard Parabolized Stability Equations
(PSE) [21] andthe three aforementioned versionsofglobal linear theory; symbols appearingto be defined shortly.
Linearization of the equations of motion may be performed around steady or unsteady
laminar basic flows, q = (, u, v, w, T)T. This is to be contrasted against some of thecurrent global instability literature which concerns time-averaged turbulent flows, which
will not be dealt with in the present article, although some comments on the applicability
of the theory, supported by the still scarce evidence in the literature, will be made in what
follows.
AIM-Education. By XXX
ISBN A-BBB-CCCCC-D c2011 The Authors
1
7/29/2019 2011 AIM ED 03 Theofilis Notes
8/45
2 NUMERICAL METHODS FOR LINEAR INSTABILITY ANALYSIS
Basic flows in complex geometries are typically provided by two- or three-dimensional
direct numerical simulations, potentially exploitingspatial invariance. Steady laminar flows
exist only at low Reynolds numbers, but numerical procedures exist for the recovery of basic
flows also at conditions where linear global instability would be expected, e.g. based on
mirroring the solution computed under the imposition of symmetries, continuation [28]or selective frequency damping [1]. In using the term small-amplitude perturbations, the
decomposition
q = q+ q + c.c., 1, (1.1)
is assumed, and solutions to the initial-value-problem
B(Re,Ma, q)dq
dt= A(Re,Ma, q)q, (1.2)
are sought. Complex conjugation is introduced in (1.1) since both the basic state, q and the
total field, q, are real while the perturbations, q, are in general complex. Unless otherwise
stated, the c.c. terms will be omitted in what follows, in order to simplify presentation, buttheir existence in the full expansion should be borne in mind.
Specific comments on the dependence of these quantities on the spatial coordinates, x,and time, t, will be made in what follows. The operators A and Bare associated with thespatial discretization of the linearized equations of motion and comprise the basic state,
q(x, t) and its spatial derivatives. In case of steady basic flows, the separability betweentime- and space coordinates in (1.2) permits introducing a Fourier decomposition in time,
q = qei, (1.3)
with a phase function, leading to the generalized matrix eigenvalue problem
Aq = Bq. (1.4)
Here matrices A and B discretize the operators A and B, respectively, incorporating theboundary conditions; q(x; t) = (, u, v, w, T)T is the vector comprising the amplitude
functions of linear density, velocity-component and temperature or pressure perturbations.The eigenvalue problem adjoint to (1.4) may also be derived, after suitable definition of
an inner product, typically associated with perturbation energy in incompressible [48] and
compressible[39] flow, and enforcement of the bi-linear concommitant to zero [38]. Both
the direct EVP (1.2) and its associated adjoint describe a modal global linear instability
scenario, applicable to the dynamic behavior of the linearized equations of motion at the
asymptotic limit t .On the other hand, re-writing (1.2) as
dq
dt= Cq, (1.5)
withC = B1A, the autonomous system (1.5) has the explicit solution
q(t) = eCt
q(0) (t)q(0). (1.6)Here q(0) q(t = 0) and the matrix exponential,(t) eCt, is known as thepropagatoroperator[14]. A solution of the initial value problem (1.5) distinguishes between the limits
t 0 and t ; while the latter limit may be described by the eigenvalue problem (1.4),growth, , of an initial linear perturbation, q(0), may be computed at all times via
2 =
eC
teCtq(0), q(0)
(q(0), q(0))=
((t)(t)q(0), q(0))
(q(0), q(0)). (1.7)
7/29/2019 2011 AIM ED 03 Theofilis Notes
9/45
INTRODUCTION - THE FULL PICTURE 3
Implicit here is the definition of an inner product, (, ), and the associated adjoints, andC
, of the operator and matrix C, respectively [38]. The discussion is completed by
introducing the singular value decomposition (SVD) of the propagator operator
(t) e
Ct
= UV
. (1.8)Here the unitary matricesV andU respectively comprise (as their column vectors) initial
and final states, as transformed by the action of the propagator operator, while is diagonal
and contains the growth associated with each initial state as the corresponding singularvalue. Given that (1.8) may be formed at all times t, without the need to introduce modalperturbations in this coordinate, the framework in which global linear analysis is performed
in this context is referred to as non-modal, solution of (1.7) permitting study of both modal-
and non-modal perturbation growth. Note also that the operator appearing in (1.7)
is symmetric, which has important consequences both for its computation and in relation
with the interpretation of its results.
In case the basic flow has an arbitrary time-dependence, the propagator operator, (t),may also be defined [15] and (1.6) may be generalized as
q(t0 + ) = () q(t0). (1.9)
The propagatormay be understoodas the operator evolving the small-amplitudeperturbation
from its state at time t0 to a new state at time t0 + . If the time-dependence of the basicstate is periodic, t0 : q(x; t0 +T) = q(x; t0), the propagator is denoted as the monodromyoperatorand it isalso Tperiodic,(t0 +T) = (t0); the monodromy operator is definedby [27]
= exp
t0+T
t0
C (q(x; t)) dt
. (1.10)
Solutions to the instability problem, indicating the development of small-amplitude pertur-
bations during one period of evolution, are obtained through Floquet theory, which seeks
the eigenvalues of the monodromy operator, also known as Floquet multipliers [6], . Tothis end, the monodromy operator is evaluated at a time T and the eigenvalue problem
(T)q = q (1.11)
is solved. The Floquet multipliers can also be expressed in terms of the Floquet exponents,
, as = eT, which identifies || = 1 as a bifurcation point and indicates that
|| < 1 : periodic flow stability, (1.12)
|| > 1 : periodic flow instability. (1.13)
Barkley et al. [5] provide an up-to-date description of global instability analysis of time-
periodic flows, with special focus on non-modal analysis and recovery of optimal (global)
disturbances arising from localized regions of classic linear (local) instability. The dis-
cussion is completed by reference to the dimensionality of the basic state and the ensuing
global instability analysis methodologies.The preceding discussion is a reasonably complete account of linear stability theory, as
is presently understood in terms of both local and global analysis, as well as in terms of
both modal and non-modal theory. Further discussion of this exciting research area may
be found in [52] and references therein. For the purposes of the course the present lecture
will mainly focus on numerical solution of the one-dimensional eigenvalue problem and
elements of the algorithms necessary to extend the analysis to multiple spatial dimensions
using a matrix-forming approach.
7/29/2019 2011 AIM ED 03 Theofilis Notes
10/45
4 NUMERICAL METHODS FOR LINEAR INSTABILITY ANALYSIS
Table 1.1. Classification of global linear theory approaches
Denomination Basic State Assumptions Phase Function
GlobalTriGlobal - q(x1, x2, x3) tPSE-3D 1q 2q, 3q q(x
1, x2, x3)
(x1)dx
1 t
BiGlobal 1q = 0 q(x2, x3) x1 t
Non-Local PSE 1q 2q; 3q = 0 q(x1, x2)
(x1)dx
1 + x2 t
Local OSE 1q = 3q = 0 q(x2) x1 + x3 t
1.2 LOCAL THEORY: THE LNSE IN 1D
We now focus on some of the concepts shown in Table 1.1., starting from the situation
pertinent to a basic flow which may be described by an one- or two-component, one-
dimensional velocity vector, (u(y), 0, w(y))T; an one-dimensional basic pressure, p(y)completes the definition of the basic flow vector q. Note that in order to simplify notation,
the coordinates (x1, x2, x3) have been substituted by (x,y,z). Under these assumptions,the Ansatz (1.1) becomes
q(x,y,z,t) = q(y) + qei(x+zt) + c.c. (1.14)
Inserting (1.14) into the full Navier-Stokes and continuity equations and linearizing,
three systems are obtained, at O(1), O() and O(2), respectively. The system at O(1)defines the basic state and is satisfied either exactly, e.g. in the case of the plane Poiseuille
flow, or approximately, e.g. in the case of boundary-layer flows. The system at O(2) isneglected, on account of the smallness of the expansion parameter . The system at O()are the linearized Navier-Stokes equations (LNSE) which, after introduction of the modal
Ansatz (1.3), become a generalized eigenvalue problem (1.4); in incompressible flow thisEVP reads
iu + vy + iw = 0, (1.15)
L1du uyv ip + iu = 0, (1.16)
L1dv py + iv = 0, (1.17)
wy v + L1dw ip + iw = 0. (1.18)
where L1d 1Re
d2
dy2
2 + 2
iu iw. The analogous expansion and
LNSE for compressible flows in which the local theory assumptions are satisfied may be
found in Mack [36]. Instability analysis based on (1.15-1.18) has been used extensively
to describe instability of free-shear and boundary-layer flows. It is reiterated here that thekey assumption made in the context of local theory is that of a parallel-flow, according
to which the basic flow velocity component v, along the spatial coordinate normal to themean flow direction, y, is neglected. Consequently, the basic state may comprise up to twovelocity components, namely the streamwise u(y) and the spanwise w(y), both of whichare functions of one spatial coordinate alone.
The boundary conditions completing the description of linear instability in the context
of local theory are the viscous boundary conditions u = v = w = 0 at solid walls or in the
7/29/2019 2011 AIM ED 03 Theofilis Notes
11/45
LOCAL THEORY: THE LNSE IN 1D 5
"far-field" (where the basic flow velocity vector assumes a constant value), alongside with
the boundary condition vy = 0, derived from the continuity equation.
1.2.1 The Orr-Sommerfeld equationThe LNSE in 1D may be re-written in the form of a single ordinary differential equation, in
which disturbance pressure is eliminated, as no boundary conditions are directly available
for this quantity. Eliminating pressure perturbation by cross-differentiation of (1.16) and
(1.18), using continuity (1.15) and substituting the result into (1.17) results in the Orr-
Sommerfeld equation for the disturbance velocity component v(y),
i
Re
v(4) 22v
+ 4v
+ (u )
v
2v
u
v = 0. (1.19)
Primes denote differentiation with respect to y andSquires theorem [34] hasbeen used asjustification of focusing on two-dimensional perturbations, for which = 0. The boundaryconditions v = v
= 0 at both ends of the integration domain complete the description of
the problem.
1.2.2 The Rayleigh equation
Theinstabilityof basic flows having inflectional profiles, e.g. theshearlayeror theboundary
layer profile inside a laminar separation bubble, may be analyzed by solution of the Rayleigh
equation
(u )
v
2v
u
v = 0, (1.20)
which may be obtained from the Orr-Sommerfeld equation in the limit Re .The no-penetration boundary condition v = 0 completes the description of the instabilityproblem. From a physical point of view, the implicit assumption in this class of analysis is
that viscosity does not affect stability. Precisely the vanishing of viscosity has the potentialfor introduction of singularities which need to be circumvented in the numerical solution.
1.2.3 Physical interpretation
The phase function in local stability analysis is 1D = x + z t. This harmonicAnsatz satisfied by the linear perturbations along the streamwise and the spanwise direc-
tions implies that these perturbations assume the form of planar or oblique waves. The
parameters describing these waves have a different physical interpretation, depending on
whether instability analysis is performed in the so-called temporal or spatial context.
1.2.3.1 Temporal stability In temporal linear stability analysis, the quantities and
appearing in (1.15-1.18), (1.19) or (1.20) are real wavenumber parameters, related withperiodicity wavelengths, Lx and Lz , along the x and z directions, respectively, by =
2Lx
and = 2Lz . The eigenvalue sought is and is in general complex, since the matrixcoefficients are complex. The real part of is interpreted as the instability wave frequency,while its imaginary part is the (temporal) amplification or damping rate of the wave. The
equivalent formulation of linear two-dimensional waves
q1d = q1dei(xct) + c.c. = q1de
i[x(cr+ici)t] + c.c. (1.21)
7/29/2019 2011 AIM ED 03 Theofilis Notes
12/45
6 NUMERICAL METHODS FOR LINEAR INSTABILITY ANALYSIS
introduces the complex eigenvalue c, the real part of which may be interpreted as beingrelated to the phase speed of the wave while its imaginary part is again the amplification or
damping rate of the perturbation.
Instability may initially be thought of as a linear superposition of monochromatic waves
which develop in streamwise (and spanwise, if = 0) periodic boxes of length Lx = 2/(and width Lz = 2/). Each wave travels inside the basic flow at its own constantphase speed cr and is growing or being attenuated at its own rate ecit. As time grows, theexponential nature of amplification/damping results in just one of these waves being the
most significant from the point of view of determination of the flow dynamics; this is the
leading eigenmode, calculation of which is the central part of the instability analysis.
The complete instability analysis involves varying the Reynolds and wavenumber pa-
rameters and identifying the frequency and amplification/damping rate of the leading eigen-
mode. Plotting the i = i(Re,) surface, two curves of interest may be defined: theneutral curve, which is the intersection of the above surface with the plane i = 0 and de-fines the boundary of stability/instability of the flow, and the maximum amplification curve,
which is the projection of the maximum values ofi on the plane i = 0. Both curves may
be utilized to identify linear instability characteristics in experiment or simulation.
1.2.3.2 Spatial stability The assumption of a constant streamwise wavenumber maybe relaxed and solutions of (1.15-1.18), (1.19) or (1.20) may be sought for a constant real
monochromatic frequency , treating as the eigenvalue. Under this point of view, linearperturbations are written as
q1d = q1dei[(r+ii)x+zt] + c.c. (1.22)
i being the (spatial) amplification or damping rate of the wave, while its wavenumber isr . This instabilityanalysis framework is preferred by experimentalists, since identificationof perturbation characteristics is more straightforward when dealing with monochromatic
waves. From a theoretical/numerical point of view the eigenvalue problem to be solved is
now nonlinear.
In a manner analogous to temporal theory, the most significant instability wave is that
having the largest amplification rate i, determination of which becomes the key objectiveof the theory. Besides calculating the (same as that yielded by temporal analysis) neutral
curve, spatial instability analysis results may also be used for laminar-turbulent transition
location prediction, using the eN method discussed in detail by Mack [36].
1.2.3.3 Spatio-/temporal stability The dichotomy of the assumptions of temporaland spatial stability is overcome by considering the most general case of both the and parameters being simultaneously complex. Monitoring results of numerical solutionof the ensuing problem, details of which are given elsewhere in this course, it becomes
straightforward to differentiate between two situations which may predominate in a laminar
flow after a perturbationhas been introduced to it. Aflow will be calledconvectively unstableor stable if the perturbation is convected away from the point of its introduction while it
is being amplified or damped, respectively, while if the perturbation remains at the point
where it was introduced in the flow and grows in time, it is called absolutely unstable.
The review of Huerre & Monkewitz [25] is essential reading in this context and discusses
several parallel flows to which this concept is applicable. The extension of the absolute-
/convective or spatio-/temporal instability analysis concept to quasi-parallel flows led to the
introduction of one of the three different contexts of the terminology global instability that
7/29/2019 2011 AIM ED 03 Theofilis Notes
13/45
NUMERICAL SOLUTION OF THE 1D EVP 7
are still in use in the literature, although their theoretical bases are distinct; the reviews of
Theofilis [51, 52] discuss details.
1.3 NUMERICAL SOLUTION OF THE 1D EVP
The solution of the eigenvalue problems introduced implies two steps, spatial discretization
which converts the linear operators associated with the temporal or spatial EVPs to linear
or nonlinear matrix eigenvalue problems, respectively, and solution of the latter using an
appropriate algorithm.
Spatial discretization may be performed using spectral methods, e.g. collocation based
on the Chebyshev Gauss-Lobatto points, finite-difference methods, ranging from standard
second-order centered to compact [31], Dispersion Relation Preserving (DRP) [49] or stable
very high-order finite differences of order q(FD-q) [22], low-order finite-element or high-order spectral-element [27] methods.
As far as the solution of the matrix eigenvalue problem is concerned, the QZ algorithm
[17] can be used for this one-dimensional eigenvalue problem. Although the memory and
runtime requirements of this algorithm scale with the square and the cube of the matrix
leading dimension, respectively, modern hardware can easily deliver converged solutions
of at least the most interesting leading eigenmodes. When the leading dimension becomes
rather large, e.g. in case of secondary instability analysis in which several Floquet coef-
ficients need be calculated in a coupled manner, iterative algorithms for the recovery of
the leading eigenvalues come into consideration. Such algorithms will be outlined in the
context of global stability analysis.
In practical terms, the linear algebra work is undertaken using software packages such
as the Open Source LAPACK library, or proprietary packages which are equivalent in terms
of their functionality as far as the solution of the problems at hand is concerned, such as
the cross-platform NAG R library or the platform-specific Intel MKL R or the IBM ESSLR linear algebra software. Finally, MATLAB R can be used in order to obtain both the
entire eigenspectrum, using the direct approach, or the most interesting part it, employingiterative means.
1.3.1 The need for accuracy
A comment regarding the importance of accuracy in stability calculations closes the present
section and provides a fitting introduction to the next. For the sake of argument, attention
is focused on the temporal EVP. Expanding (1.14) for any of the disturbance vector com-
ponents, say for the streamwise perturbation velocity u, and focusing on temporal analysisof two-dimensional traveling waves, the following expression results
u(x,y,t) = u(y) + {ur(y) cos[(x crt)] ui(y)sin[(x crt)]} ecit, (1.23)
where subscripts r and i denote real and imaginary parts of the respective quantities.The time and space development of the observable instability, namely the l.h.s. of equation
(1.23), is fully described by the r.h.s. of this equation. The ingredients of the latter are
the basic flow, u, which is taken to be known to arbitrary accuracy, the space and timecoordinates, x and t, which are also known at each measurement point and time and theresult of the solution of the eigenvalue problem, c = cr + ici or, equivalently, = r +ii. Precise theoretical knowledge of the sought eigenvalue completes the description
7/29/2019 2011 AIM ED 03 Theofilis Notes
14/45
8 NUMERICAL METHODS FOR LINEAR INSTABILITY ANALYSIS
of the perturbations and permits comparison with frequency results extracted from the
observed signal by Fourier transform and amplification rates computed from the slope of
the logarithmic time-derivative of (1.23) in a simulation, or from that of measured quantities
at different time instances. Errors in the calculation of either quantity amplify exponentially
and may lead to erroneous conclusions regarding the validity of the analysis, e.g. in termsof its capacity to predict transition location using empirical means such as the eN method.
1.4 THE PSE
Efforts to remedy the inconsistencies arising from the parallel-flow approximation, as well
as the desire to substitute empirical transition prediction methods by theoretically-founded
approaches, have resulted in improved descriptions of the instability problem for boundary-
layer and shear-layer flows. The most successful approach has been based on the utilization
of a multiple-scales approach for the description of instability. In this context both the
basic state and the perturbations are taken to depend, besides y, on the streamwise spatialcoordinate, x, as well. However, the key assumption of multiple-scales approaches is thattwo scales exist along x, one on which the basic state depends and a different one, onwhich the perturbations are taken to develop. The first is taken to be the coordinate x itself,while the second is x, with the small parameter = O(Re1). This multiple-scalesapproximation (also called WKBJ approach, after the initials of the authors who introduced
it) has been used prior to the introduction of the PSE in conjunction with solutions of the
Orr-Sommerfeld equation in order to improve prediction of the critical conditions of Blasius
boundary layer flow. However, the missing ingredient in early attempts along this path was
the idea of parabolizing the stability equations; this was independently introduced by Hall
[18] for the study of stability of Gortler vortices on a curved surface and by Herbert for the
study of the stability of the Blasius boundary layer [7].
Formally one proceeds using a consistent expansion of all flow quantities in terms of a
small parameter, typically the inverse of the Reynolds number. The particular form of the
Ansatz (1.1) in the case of PSE is
q(x,y,z,t) = q(x, y) + q(x, y) ei[Rx()d+zt] + c.c. (1.24)
Note that q(x, y) = (u, v, w, p)T(, y), which permits the introduction of the small butessential non-zero wall-normal velocity component v into the instability analysis. Secondderivatives of the perturbations with respect to the streamwise flow direction are neglected.
Analysis of the resulting equations [32, 33] shows that the associated ellipticity of the
LNSE is eliminated (albeit not fully - see original references for details) and the stability
problem may be parabolized, marching the perturbation equations along the streamwise
flow direction. This is the origin of the Parabolized Stability Equations (PSE) nomenclature
being utilized to differentiate this stability analysis approach from earlier efforts within the
same WKBJ class. The eigenvalue problem nature of the stability equations is lost in a PSE
context, although it is straightforward to relate partial derivatives of the perturbation flowquantities with the wavenumber and amplification rates obtained from solution of EVPs at
successive downstream flow locations. Note also that introduction of nonlinearity into the
instability analysis is now possible in a self-consistent manner. One of the most interesting
results of the classic paper by Bertolotti et al. [7] has been the excellent agreement of
nonlinear PSE and spatial DNS results for transition on the flat plate boundary layer, results
of the nonlinear PSE being orders-of-magnitude less expensive to obtain compared with
those delivered by DNS. An equally important result was obtained by Haynes& Reed [19] in
7/29/2019 2011 AIM ED 03 Theofilis Notes
15/45
GLOBAL THEORY: THE LNSE IN 2D 9
their theoretical prediction of the experimentally discovered crossflow vortex stabilization
by Distributed Roughness Elements [46, 47].
Numerical solution of the PSE will not be discussed in detail here. However, it is a
straightforward task to derive the equations and set up an algorithm for their solution, based
on solution of an Ordinary Differential Equation at each downstream location, combinedwith a simple Euler scheme along the marching spatial direction. As discussed by Li &
Malik [32] care should be taken in order to avoid the residual ellipticity in the PSE equations
by choosing marching steps that are not too short for this ellipticity to destroy the solution
procedure.
1.5 GLOBAL THEORY: THE LNSE IN 2D
1.5.1 The (direct) BiGlobal EVP
When the basic flow the stability of which is to be studied depends on two out of the
three spatial directions and is independent of the third, q = [u, v, w, p]T(x, y), the analysis
proceeds following the Ansatz
q(x,y,z,t) = q(y, z) + q(y, z)ei[xt] + c.c. (1.25)
The disturbances are three-dimensional, but a sinusoidal dependence along the homoge-
neous x-direction is assumed, with the periodicity length Lz = 2/. Upon substitutionof (1.25) into the LNSE the system of equations results
iu + vy + wz = 0, (1.26)
L2du + uyv + uzw + ip iu = 0, (1.27)
(L2d + vy)v + vzw + py iv = 0, (1.28)
(L2d + wz) w + wyv + pz iw = 0, (1.29)
where L2d = 1Re (yy + zz
2) + iu + vy + wz.
Note that, if{.}z i{.} is considered, the operators L2d and L1d become identical
and the PDE-based system (1.26-1.29) reduces to the ODE-based system (1.15-1.18). The
elliptic eigenvalue problem (1.26-1.29)is complemented withadequate boundary conditions
for the disturbance variables, typically no-slip on solid walls for the velocity components
and the associated compatibility conditions for pressure, if the latter variable is maintained
in the vector sought. Alternatively, pressure may be eliminated to yield the two-dimensional
analogue of the Orr-Sommerfeld equation, as originally done by Tatsumi & Yoshimura [50],
or the two-dimensional analogue of the Rayleigh equation, first presented and solved by
Henningson [20].
The primitive-variable formulation (1.26-1.29) can be written as a two-dimensional
partial-derivative-based generalized eigenvalue problem, which can be recast in matrixform as the (linear) temporal BiGlobal eigenvalue problem,
A q = Bq (1.30)
or the (nonlinear) spatial BiGlobal eigenvalue problem,
A q =2
k=1
kBk q. (1.31)
7/29/2019 2011 AIM ED 03 Theofilis Notes
16/45
10 NUMERICAL METHODS FOR LINEAR INSTABILITY ANALYSIS
The physical interpretation of the parameters and depends on whether the temporal orthe spatial framework has been chosen for the analysis, much like in the classic 1D stability
theory, while the operators A and Bdefining (1.30) may be found explicitly in the literature,e.g. in Paredes et al.[42].
1.5.2 The adjoint BiGlobal EVP
Hill [23, 24] has introduced the utility of adjoints in identifying flow receptivity and sensi-
tivity in both one and two-dimensional flows, while more recently Luchini and co-workers
have put forward the idea of structural sensitivity of global modal perturbations, which
may be identified through a direct-adjoint BiGlobal eigenmode product, and successfully
applied the concept to the lid-driven cavity flow [35] and the cylinder wake [16].
The derivation of the complex BiGlobal eigenvalue problem governing adjoint pertur-
bations is constructed using the Euler-Lagrange identity [38, 13, 8, 43, 35, 16],
q
t+Nq+ p q
+ qp +q
q
t+Nq + p
+ p q
=
t(q q) + j(q, q), (1.32)
as applied to the linearizedincompressible Navier-Stokes and continuityequations. Here
the operator N(q) results from linearization of the convective and viscous terms in thedirect and adjoint Navier-Stokes equations and is explicitly stated elsewhere (e.g. [13]).
The quantities q = (u, v, w)T and p denote adjoint disturbance velocity componentsand adjoint disturbance pressure, andj(q, q) is the bilinear concomitant. Vanishing of theRHS term in the Euler-Lagrange identity (1.32)defines the adjoint linearizedincompressible
Navier-Stokes and continuity equations
q
t+Nq + p = 0, (1.33)
q = 0, (1.34)
Assuming modal perturbations and homogeneity in the spatial direction x eigenmodesare introduced into (1.33-1.34) according to
q = q(y, z)ei(xt). (1.35)
Note the opposite signs of the spatial direction x and time in (1.25) and (1.35) denotingpropagation ofq in the opposite directions compared with the respective one for q. Sub-
stitution of (1.35) into the adjoint linearized Navier-Stokes equations (1.33-1.34) results
in the complex adjointBiGlobal EVP, details of which are omitted here, but will be made
explicit in the next Lecture. For completeness, it is mentioned that an EVP analogous instructure to the direct BiGlobal EVP is obtained, whose linear operator is
L =1
Re
2
y 2+
2
z 2 2
iu + v
y+ w
z. (1.36)
Boundary conditions for the partial-derivative based adjoint EVP may be devised fol-
lowing the general procedure of expanding the bilinear concomitant in order to capture
traveling disturbances [13].
7/29/2019 2011 AIM ED 03 Theofilis Notes
17/45
NUMERICAL SOLUTION OF THE 2D EVP 11
1.5.3 The 2D Helmholtz EVP
Closer inspection of (1.26-1.29) and (1.36) reveals that the two-dimensional Laplace oper-
ator is at the heart of the operator L2d defining the BiGlobal direct and adjoint eigenvalue
problems. When setting up a numerical procedure for the solution of the BiGlobal EVPit is advisable to take advantage of partial validation cases, one of which is offered by the
well-known (multi-dimensional) Helmholtz equation. The eigenvalue problem2
y 2+
2
z 2
+ 2 = 0 (1.37)
in the rectangular membrane domain y [0, Ly] z [0, Lz] is known to have ananalytical solution [38] for the eigenvalues
2ny,nz = 2
nyLy
2+
nzLz
2; ny, nz = 1, 2, 3, (1.38)
and associated eigenfunctions
ny,nz (y, z) = sin(nyy
Ly)sin(
nzz
Lz). (1.39)
The eigenvalue problem (1.37-1.39) is thus useful in assessing the accuracy of the
proposed spatial discretization method, especially in the recovery of the higher eigenval-
ues/eigenfunctions, ny, nz 1.
1.6 NUMERICAL SOLUTION OF THE 2D EVP
The solution of a multi-dimensional eigenvalue problem also implies two steps, spatial
discretization which converts the linear operator into a linear or nonlinear matrix eigenvalue
problem, and solution of the latter using an appropriate (typically iterative) algorithm.
Thesame spatial discretization methodused forlocal analysis mayalso be used for the2D
(or 3D) eigenvalue problem. Spectral collocation based on the Chebyshev Gauss-Lobatto
points, finite-difference, finite-volume, finite-element and spectral-element methods have
all been employed in this context.
1.6.1 Matrix-forming or Time-stepping
A dichotomy exists in terms of solving the multidimensional eigenvalue problem by ex-
tending the techniques used in local stability analysis and forming a multi-dimensional
matrix ("matrix-forming") or by downsizing and expanding a direct numerical simulation
algorithm to obtain solutions to the multi-dimensional (direct or adjoint) EVP by "time-
stepping" techniques. The former approach will be discussed in this presentation, while the
latter is the topic of the following lecture.
1.6.2 The Kronecker product
A key element in the matrix-forming approach in two spatial dimensions is the Kronecker
product, M A B, where matrices A Cmn and B Crs represent discretizationin either of the two spatial directions. Then M Cmrns discretizes in both dimensionsin a coupled manner and is defined as
7/29/2019 2011 AIM ED 03 Theofilis Notes
18/45
12 NUMERICAL METHODS FOR LINEAR INSTABILITY ANALYSIS
M A B =
a11B a12B a1nBa21B a22B a2nB
..
.
..
.
. . ...
.am1B am2B amnB
. (1.40)The extension to three spatial dimensions is straightforward. However, note that the
dimensions of the two-dimensional matrix M are now mr ns, which all but precludesusing directmethods based on theQZ algorithmfor therecovery of itseigenvalues. Themost
usedalternative for the computation of an interestingsubset of eigenvaluesin multiple spatial
dimensions is based on subspace iteration, notably the Arnoldi algorithm. However, before
introducing this algorithm, some thoughts on the properties of matrix M are appropriate.
1.6.3 On the sparsity patterns in global instability analysis
The nature of the global eigenvalue problem to be solved determines the choice of both
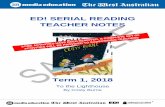
spatial discretization and EVP solution approach to be followed. In this respect, it is in-structive to examine the sparsity pattern of relevant discretized linear operators. Figure
1.3. shows these patterns (obtained using the "spy"function of MATLAB R) for the Lapla-cian, the incompressible BiGlobal eigenvalue problem in a two-component basic flow (the
lid-driven cavity[53]) and the compressible BiGlobal eigenvalue problem pertinent to a
three-component basic flow (the swept leading edge boundary layer [55]). All three prob-
lems have been discretized using the spectral collocation method based on the Chebyshev
Gauss-Lobatto grid, which will be outlined in the next section, and have been plotted using
the same scale, in order for relative differences to be appreciated.
The first point concerns the symmetric nature of the Laplacian, as opposed to the non-
symmetric nature of both of the other two problems, which is immediately obvious in figure
1.3.. This is a key consideration when choosing an algorithm for the solution of the EVP:
what will work nicely for the Laplace/Poisson/Helmholtz EVP may not converge as rapidly
or not work at all for the global stability problem. Interestingly, if the SVD of the stability
matrix is sought, then the symmetry property may be recovered and methods for the Laplace
equation may also be employed.
The second point to be made is that the sparsity pattern of the global EVP is affected
by two factors, whether incompressible or compressible flow instability is monitored, and
whether (two-dimensional) one-, two- or three-component flow instability is addressed.
While a rather large number of zero elements may be seen in the analysis of a single basic
flow velocity component incompressible flow (e.g. the rectangular duct [50]) the non-zero
elements predominate when global instability analysis of compressible flow is performed, in
which all three velocity components are present (e.g. the swept leading edge boundary layer
[55]). Consequently, sparse linear algebra software which performs nicely for the former,
may become uncompetitive for the latter class of problems, for which the computing cost
of the solution approaches that of a dense approach.This leads naturally to the last and probably most significant point that can be deduced
from theresults presented: if thematrix-forming approach is to be made competitive to other
methodologies for the solution of the global EVP, the sparsity pattern needs to be increased
substantially. This could be achieved by substituting the spectral collocation approach by
a low-order finite-difference method. However, the loss of accuracy of the finite-difference
method would not compensate for the increase of efficiency. What is really needed is a
finite-difference method which is (very) high-order accurate (and stable) and at the same
7/29/2019 2011 AIM ED 03 Theofilis Notes
19/45
THE PSE-3D 13
time requires much shorter stencils than those used in the spectral collocation approach.
Such a method will be introduced in the next section.
1.6.4 On iterative solutions of the EVP - the Arnoldi algorithm
By far the widest-employed and most successful approach for numerical solution of large-
scale eigenvalue problems is the Arnoldi [4, 45] member of the Krylov subspace iteration
methods. On of the variants of the Arnoldi algorithm [51] converts the generalized EVP
(1.4) into the standard eigenvalue problem
Aq = q, A = (A B)1B, =1
(1.41)
and constructs a Krylov subspace, a Hessenberg matrix Hij and a sequence of Ritz
vectors in an iterative manner, as schematically shown in figure 1.4.. The eigenvaluesof the (much smaller, compared with the original problem dimension) Hessenberg matrix
may be calculated by direct means using the QZ algorithm and are increasingly better
approximations of thoseof the original problem as the Krylov subspace dimensionincreases.
1.6.5 The linear algebra work
Finally, the linear algebra workfor large matrix leading dimensionsmay be undertaken either
in serial manner, if practically possible, or as is more common, in parallel. If operations are
performedin a dense linearalgebra context theOpen SourceScaLAPACK or thecommercial
equivalents offered by the NAG R, Intel MKL R or IBM PESSL R libraries may be used.If sparse linear algebra operations are envisaged, the MUMPS [2, 3] package offers an
alternative.
1.7 THE PSE-3D
The derivation of the parabolized equations in two fully resolved and one slowly-varying
spatial direction, an analysis concept abbreviated as PSE-3D [10], is again based upon the
introduction of a small parameter = O(Re1) and the associated slowly varying spatialcoordinate = x, as was done in the classic PSE approach. By contrast to the PSE, thebasic flow is now q = [u, v, w, p]T( , y , z), i.e. it corresponds to a fully three-dimensionalflow which is strongly dependent on two and weakly on the third spatial direction. A system
of trailing vortices behind a finite-span lifting surface is a flow which would typically be
analyzed by the PSE-3D approach. The Ansatz pertinent to PSE-3D is
q(x,y,z,t) = q( , y , z) + q( , y , z)ei[Rx()dt] + c.c. (1.42)
Substituting (1.42) into the linearized Navier-Stokes equations and neglecting terms of
order 2 the incompressible linear PSE-3D equations are obtained [10, 11, 42]
7/29/2019 2011 AIM ED 03 Theofilis Notes
20/45
14 NUMERICAL METHODS FOR LINEAR INSTABILITY ANALYSIS
(L2d i + ux)u + uyv + uzw + ip +
u
2i
Re
ux + px
i
Re
d
dxu = 0,(1.43)
(L2d i + vy)v + vxu + vzw + py +u 2i
Re vx i
Reddx
v = 0,(1.44)
(L2d i + wz) w + wxu + wyv + pz +
u
2i
Re
wx
i
Re
d
dxw = 0,(1.45)
ux + iu + vy + wz = 0.(1.46)
Hence the PSE-3D can be written in a compact form as
(L2d i) q+ Mq
x=
d
dxNq
(1.47)
where operators L2d, M and N define PDEs dependent on y and z. The term in squarebrackets can be neglected becauseN arises from the viscous terms and is ofO(Re1) as is
the derivative d/dx. Technical details of this class of analysis, which is an active researchtopic, are provided by Paredes et al. [42].
1.8 GLOBAL THEORY: THE LNSE IN 3D
1.8.1 The TriGlobal EVP
Finally, when the base state depends essentially on all three spatial coordinates, q =[u, v, w, p]T(x,y,z), instability analysis proceeds along with the Ansatz
q(x,y,z,t) = q(x,y,z) + q(x,y,z)eit + c.c. (1.48)
Linearization follows and the the eigenvalue and the three-dimensional eigenfunctionsq = [u, v, w, p]T(x,y,z) are determined through solution of the TriGlobal EVP
ux + vy + wz = 0, (1.49)
[L3d ux = i] u uy v uzw + px = 0, (1.50)
vxu + [L3d vy + i] v vzw = 0, (1.51)
wxu wyv + [L3d wz + i] w = 0, (1.52)
with L3d 1Re (xx + yy + zz)uxvywz . TriGlobal analysis is the present-
day state-of-the-art in terms of the challenging nature of the underlying EVP solution; see
Theofilis [52] for a review. In the closing section of these notes brief mention will be made
regarding the ongoing efforts in the authors group to generate an efficient and accurate
matrix-forming approach for the numerical solution of the TriGlobal EVP.
1.8.2 The 3D Helmholtz EVP
As with the analogous two-dimensional eigenvalue problem, the Helmholtz eigenvalue
problem in three spatial dimensions and regular geometries offers the possibility of vali-
dating the Laplace operator part of the TriGlobal EVP solution algorithm. In three spatial
dimensions the Helmholtz eigenvalue problem
7/29/2019 2011 AIM ED 03 Theofilis Notes
21/45
GLOBAL THEORY: THE LNSE IN 3D 15
Figure 1.1. Matrix-forming vs. time-stepping for linear stability in multiple dimensions
2
x2+
2
y 2+
2
z 2
+ 2 = 0 (1.53)
in the domain x [0, Lx] y [0, Ly] z [0, Lz] is known to have an analyticalsolution [38] for the eigenvalues
2nx,ny,nz = 2
nxLx
2+
nyLy
2+
nzLz
2; nx, ny, nz = 1, 2, 3, (1.54)
and associated eigenfunctions
nx,ny,nz (x,y,z) = sin(nxx
Lx)sin(
nyy
Ly)sin(
nzz
Lz). (1.55)
Much like the analogous two-dimensional case, the eigenvalue problem (1.53-1.55) is
thus useful in assessing the accuracy of any given spatial discretization method, especially
in the recovery of the higher eigenvalues/eigenfunctions, nx, ny, nz 1.
7/29/2019 2011 AIM ED 03 Theofilis Notes
22/45
16 NUMERICAL METHODS FOR LINEAR INSTABILITY ANALYSIS
Figure 1.2. Spatial discretization methods for linear stability in multiple dimensions
Figure 1.3. Sparsity patterns of the Laplace operator (left) incompressible BiGlobal EVP (middle)
and compressible BiGlobal EVP (right), discretized using the spectral collocation method.
Compute #A A il And overwrite #A by its LU-decomposition
Compute the entries hi;j of the Hessenberg Matrix %Hm
Initialize#r0 1; 1;y; 1
T; r0 : #r0=jj#r0 jj2;h0;0 jj#r0 jj2; %V0 r0
For j 0;y;m 1 do
Set rj : B; rjUse #A to solve (55)
For i 0;y;j dohi;j : %Vi; rjrj : rj hi;j %Vi
Form hj1;j jjrjjj2
and %Vj1 rj=hj1;j Compute the eigenvalues of Hm %Hmlast row using the QZ
Select an interesting eigenvalue and calculate its Ritz vector q %V;y
Figure 1.4. The Arnoldi algorithm (from [51])
7/29/2019 2011 AIM ED 03 Theofilis Notes
23/45
CHAPTER 2
NUMERICAL SOLUTION METHODS
2.1 SPATIAL DISCRETIZATION
2.1.1 Collocation solution of linear differential operators
The one-dimensional linear eigenvalue problems exposed in the previous section may be
solved by constructing an operator which discretizes an n-th order linear ODE in the form
L(x) = an(x)D(n) + ... + a1(x)D
(1) + a0(x) (2.1)
where D(m) is the mth derivative with respect to the independent variable x anda0, a1,...an are functions of x. A collocation approach requires a discrete grid, xi, andassociated differentiation matrix, both of which will be defined in subsequent sections. For
now, we keep the symbolic form
Lij = an(xi)D(n)ij + ... + a1(xi)D
(1)ij + a0(xi) (2.2)
with D(m)ij the mth derivative matrix corresponding to the collocation points xi and
a0, a1,...an evaluated at xi. Here Lij denotes the contribution of grid point xj to theoperator L at xi.
The Ordinary Differential Equation
Lu(x) = f(x) (2.3)
may then be transformed into
AIM-Education. By XXX
ISBN A-BBB-CCCCC-D c2011 The Authors
17
7/29/2019 2011 AIM ED 03 Theofilis Notes
24/45
18 NUMERICAL SOLUTION METHODS
j
Liju(xj) = f(xi), (2.4)
that is, a matrix equation
AX = B, (2.5)
withX the vector of unknowns u(xj), the coefficient matrixA constructed with the aidofLij and the RHS vectorB comprising the (known) function values f(xi).
2.1.1.1 Boundary ConditionsBefore (2.5) may be solved the m boundary conditions associated with (2.3) have to be
imposed. One of the ways to accomplish this is by dropping m rows in (2.5) and replac-ing them by rows derived from the boundary conditions. Specifically, a Robin boundary
condition
Dy(x) + y(x) = 0, at x = x0 (2.6)
may be imposed by replacing the appropriate row of (2.5) by the spectral analogue of
(2.6) at x = x0. For the sake of demonstration of the ideas presented, consider the followingproblems.
2.1.2 Spectral Collocation
In this section we discuss construction of collocation differentiation matrices and associated
grids from first principles, and introduce the Chebyshev-Gauss-Lobatto spectral collocation
method to accomplish the task of solving linear ODEs.
Fundamental to a spectral representation of a function on an as yet unspecified grid is
the concept of the basis functions and, associated with it, the expansion coefficients of thefunction. The function value on a gridpoint may be reconstructed through the contribution
ofall expansion coefficients (defined on all gridpoints), weighted accordingly by the basis
function value on the corresponding gridpoint. It may already be anticipated that spectral
methods inherit their accuracy (and their potential miscarriages!) through this "global"
character. We may call "the function" either the set of numbers values-of-the-function on
this grid ("collocation") or, equivalently, the set of numbers values-of-the-coefficients (the
"spectrum") on the same grid. Symbolically,
Function Values Spectrum.
The importance of this equivalence cannot be overemphasized. When the solution proce-
dure needs to be extended to include nonlinear terms, as the case is in the PSE and PSE-3D
approaches introduced earlier, It is through successive sweeps between the so-called "phys-ical" (="real") space, where function values are defined and "spectral" space, where the
coefficients live, that nonlinear terms arising in equations are evaluated.
Central to the expansion of a function is, of course, the grid on which it is expanded.
This issue should not be taken light-heartedly since it potentially holds the balance between
success or failure of a spectral method. Grids associated with spectral expansions are
discussed in depth by Boyd[9]. Appropriate grid choices are also at the heart of the FD-q
finite-difference methods which will be introduced in what follows.
7/29/2019 2011 AIM ED 03 Theofilis Notes
25/45
SPATIAL DISCRETIZATION 19
2.1.2.1 Interpolation with cardinal polynomialsStarting from first principles, we assume that a set of(N+ 1) different points xk [a, b]
is given. This set is called the
grid : (xk), k = 0, 1, ..., N, a xk b (2.7)
The polynomial of degree (N+1) which vanishes at the grid is
(x) = A
Nk=0
(x xk), A = 0 (2.8)
The cardinal polynomial Kj is the unique polynomial with the properties:
(i) degree(Kj) = N
(ii) Kj(xi) = ij =
0, i = j
1, i = j(2.9)
The cardinal polynomials may be used to represent the polynomial (INf) of degree N, which interpolates a (general) function f at the grid, viz.
(INf)(x) =Nj=0
Kj(x)fj , fj = f(xj) (2.10)
The Lagrange interpolation formula, including the error, is
f(x) = (INf)(x) +fN+1()
(N + 1)!
(x)
A, = (x) [a, b] (2.11)
2.1.2.2 DifferentiationThe derivative of the interpolating polynomial (INf), by reference to (2.10), is given by
d
dx(INf)(x) =
Nj=0
K
j(x)fj (2.12)
Evaluated at the x = xi grid point this becomes
d
dx(INf)(xi) =
Nj=0
K
j(xi)fj i = 0, 1,...,N (2.13)
Hence,
7/29/2019 2011 AIM ED 03 Theofilis Notes
26/45
20 NUMERICAL SOLUTION METHODS
(INf)
= Df (2.14)
where D denotes the (N + 1) (N + 1) matrix with elements
D = (dij), dij = K
j(xi), 0 i, j N (2.15)
and
f = (f0, f1,...,fN)T
(2.16)
and similarly for (INf)
. The matrix D is called the collocation derivative matrix. Dis fully characterized by the equation
u
= Du, u PN (2.17)
where PN denotes the set of all polynomials with degree N.
2.1.2.3 The second and higher derivativesThe second collocation derivative matrix D(2) can be defined in the same way as the first
derivative D. It will be clear that this leads to
D(2) =
d(2)ij
=
K
j (xi)
, 0 i, j N (2.18)
Again, this matrix is completely characterized by
u
= D(2)u, u PN (2.19)
Now, ifu PN then also u
PN and it follows that
u
= Du
= D (Du) = D2u, u PN (2.20)
Hence,
D(2) D2 (2.21)
In other words, the second derivative matrix may be obtained by squaring the first
derivative matrix. This may be generalized to construct the general mth collocationderivative matrix, simply by
D(m) Dm (2.22)
7/29/2019 2011 AIM ED 03 Theofilis Notes
27/45
SPATIAL DISCRETIZATION 21
Two points should be remarked in this context. First, it may be argued that repeated
(numerical) operations may result in loss of significant digits in the higher matrices. This is
especially true of machines with limited precision arithmetic. For a given system of linearequations which may be recast in the form of an equivalent single equation in which higher-
order derivatives appear, e.g. the LNSE in 1D vs. Orr-Sommerfeld equation, a trade-off
exists regarding the cost at which a given level of precision is expected: one may choose
to work with the original system in which lower-order differentiation is needed, or with the
single equation, which needs a smaller-size matrix for its discretization at the price of loss
of significant digits due to the discrete representation of higher-order derivatives. Second,
a further advantage of the collocation approach as compared to standard finite-differences
is that no special formulae are required for the calculation of derivatives at the endpoints of
the domain.
2.1.2.4 Formulae and properties of Chebyshev polynomialsUp to now, the grid (xk) hasnot been specified, the only demand being that the gridpoints
are contained in some interval [a, b] and are mutually different. In this section we will use[a, b] = [1, 1] and choose grids related with the Chebyshev polynomials Tn(x).
There exists a grid which minimizes the maximum of
(x)A = N
k=0
|x xk| (2.23)
which appears in the interpolation error, eq. (2.11). If the gridpoints xk are the zeroesofTN+1(x), then it can be shown that
max1x1
N
k=0
|x xk| = 2N (2.24)
while any other choice of the grid points in [1, 1] results in a larger maximum. In theparticularly simple and attractive choice of equidistant gridpoints, the maximum is much
larger than the value given above. The minmax property given above is an important and
useful property of Chebyshev polynomials, e.q. in approximation theory.
In order to explicitly derive collocation derivative matrices for the grids based on Cheby-
shev polynomials we need a number of relations for these polynomials and this will now
be considered. The Chebyshev polynomials may be defined by the recursion
T0(x) = 1, T1(x) = x, Tn+1(x) = 2xTn(x) Tn1(x), n = 1, 2,... (2.25)
Note the odd/even character; note also that the highest power of x in Tn+1(x) has acoefficient 2n. From the trigonometric identity
cos(n + 1) = 2 cos() cos(n) cos(n 1) (2.26)
7/29/2019 2011 AIM ED 03 Theofilis Notes
28/45
22 NUMERICAL SOLUTION METHODS
it can be shown that
Tn(cos()) = cos(n), x = cos() (2.27)
This expression is called the trigonometric representation of Tn+1(x). An immediateconsequence is
||Tn|| = max1x1
|Tn(x)| = 1 (2.28)
and
TN+1(x) = 0, at x = xk = cos
k + 1
2
N + 1
, k = 0, 1,...,N (2.29)
2.1.2.5 The Gauss-Lobatto gridFrom the trigonometric representation ofTn(x) it is clear that the extrema of TN(x) are
1 and these are attained at the Gauss-Lobatto grid points
xk = cos(k/N) , k = 0, 1,...,N (2.30)
depicted in Figure 2.1.. These points are the zeroes of the polynomial
(x) = (x2 1)T
N(x) =N
2
(TN+1(x) TN1(x)) (2.31)
which follows from (1.43).
The collocation derivative matrix D for the Gauss-Lobatto grid is denoted by
D(1)GL (dij), 0 i, j N (2.32)
and the elements d as obtained from (1.17), (1.18), (1.65) and (1.68) are
d00 = dNN = (2N2 + 1)/6djj =
xj2(x2j1)
, 1 j N 1
dij = (1)ijci/c
jxixj , i = j
with cj defined by (1.66).
2.1.2.6 Chebyshev approximation of a non-periodic functionThe Gauss-Lobatto grid is taken to be
xj = cosj
N, j = 0,...,N (2.33)
7/29/2019 2011 AIM ED 03 Theofilis Notes
29/45
SPATIAL DISCRETIZATION 23
the extrema of the Nth order Chebyshev polynomials1
TN(x) = cos(Ncos1x) (2.34)
and is seen to be such that xj [1, 1]. We again appeal to mappings, to be introducedlater, which may take virtually any grid of interest onto [1, 1] and, hence, remove theapparent restriction imposed by use of the grid (2.4). As with a periodic function, we need
a sum to construct the (real space) interpolating polynomial INf(x) to f(x). This is
(INf) (x) =
Nn=0
fnTn(x) (2.35)
where the expansion coefficients (in spectral space) are given by
fn =2
N
1
cn
N
j=01
cjf(xj)Tn(xj) (2.36)
with
cj =
2, j = 0 or j = N1, 1 j N 1
2.1.2.7 Differentiation: The collocation derivativeFrom the outset it should be born in mind that differentiation, when using a spectral
method, maybe performedin either real or spectral space. This goesto underline (again) the
equivalence (and sometimes necessity) of working with either of the discrete representations
of a function. There are several ways to calculate derivatives within spectral expansions.
Here we focus on representing derivatives with the aid of collocation derivative matrices.
2.1.2.8 Non-periodic functions The collocation derivative matrix for Chebyshev ex-pansions, as defined in 2.1.2 and the Gauss-Lobatto points xj is (see Chapter 1)
(D(1)GL)i,j =
2N2+16
, i = j = 0
xj2(1x2j )
, i = j = 0, N
cicj
(1)j+i
xixj, i = j
2N2+16
, i = j = N
(2.37)
The mth derivative may be calculated through
dm
dxmINf(xk) =
Nj=0
(D(m)GL )k,jf(xj) (2.38)
when the Gauss-Lobatto points are used.
1It is not difficult to see why Boyd[9] calls these functions Fourier cosines in disguise!
7/29/2019 2011 AIM ED 03 Theofilis Notes
30/45
24 NUMERICAL SOLUTION METHODS
2.1.2.9 MappingsRarely will the case be that the domain on which a function we are interested in coincides
with the standard domains on which the spectral grids are defined2
If a mapping function
j = (xj)
is used to map the domain of interest onto the standard collocation domain xj the collo-cation derivative matrices are modified by use of the chain rule as
bD(1)k,j
() =dx
dD(1)
k,j(x) (2.39)
bD(2)k,j() =dx
d
2D
(2)k,j(x) +
d2x
d2D
(1)k,j(x) (2.40)
bD(3)k,j() =dx
d
3D
(3)k,j(x) + 3
d2x
d2dx
dD
(2)k,j(x) +
d3x
d3D
(1)k,j(x) (2.41)
bD(4)k,j() = dx
d4
D(4)
k,j
(x) + 6d2x
d2dx
d2
D(3)
k,j
(x)
+3
d2x
d2
2D
(2)k,j(x) + 4
d3x
d3dx
dD
(2)k,j(x) +
d4x
d4D
(1)k,j(x) (2.42)
The mapping function to be utilized should be chosen according to the criteria (1) obvi-
ously, it should be transforming the domain of interest onto one of the collocation domains
presented earlier; whether the problem is periodic or not should decide the spectral expan-
sion to be used; (2) more subtly, significant regions in the flow field, such as walls, internal
sharp gradients or wave-like solutions, should be given sufficient points to be resolved prop-
erly. Various authors have suggested mappings appropriate to specific problems. Boyd[9]
and Canuto et al.[12] discuss some alternatives. A widely used mapping for semi-infinite
domains, such as that in the normal to a flat plate, is
j = l1 xj
1 + s + xj(2.43)
with l a parameter depending on the extent of the domain and s = 2l
2.1.2.10 Direct solution of Lu = f We can now make the above discussion com-plete by solving the linear system Lu = f in a direct (non-iterative) manner. For the sakeof simplicity of exposition of the ideas involved, take L in (2.3) to be
L(x) = D(2) + (x)D + (x)
and the boundary conditions associated with the problem both Dirichlet and Neumann
conditions at one endpoint of the integration domain. We proceed by setting up the equation
at these collocation points. Given that in this example ODE no special symmetries exist, thesafe choice of basis functions for expansion of u(x) is Chebyshev polynomials.3 Choosingthe Gauss-Lobatto as the collocation grid xi [1, 1] on which the ODE is to be solved,4
the spectral linear differential operator may be constructed as
2although Poiseuille flow in a straight channel is an exception, since we may normalize the normal-to-the-wallsdirectionby the channel half-widthso as to makethe calculation gridcoincidewith the standardChebyshev [1,1]3see Boyd[9] for a rational discussion of the procedure of selecting basis functions guided by the ODE.4by virtue of a linear transformation any integration domain of interest may be mapped onto this standard grid
7/29/2019 2011 AIM ED 03 Theofilis Notes
31/45
SPATIAL DISCRETIZATION 25
Lij = (D(2)GL)i,j + (xi)(D
(1)GL)i,j + (xi), i = 2,...,N, j = 0,...,N (2.44)
The two first rows ofLij have been reserved for the boundary conditions to be imposed,namely
L0,j = 0, j = 1,...,N L00 = 1,
L1,j = (D(1)GL)0,j, j = 0,...,N.
Correspondingly, the right-hand-side vectorB in equation (2.5) comprises the boundary
conditions as its first two entries and the function f(xi) in the rest.
2.1.3 The FD-q high-order finite-difference method [22]
Consider the generic initial boundary value problem for u(x, t) comprised by the partialdifferential equation
u
t= L
x,t,u,
u
x,
2u
x2
(2.45)
and the following boundary and initial conditions:
B1(u,u/x) = 0, x = 1,
B2(u,u/x) = 0, x = +1,(2.46)
u(x, 0) = f(x), x [1, +1]. (2.47)
A numerical approximation to the above formulated differential problem is sought on
a discrete set of grid nodes {xi, i = 0, . . . , N } located in the domain [1, +1] by em-ploying finite difference approximations to the first and second order space derivatives.
The approach followed for the derivation of the finite difference approximations is briefly
presented in the following subsections. See the work by Hermanns and Hernandez [22]
for in-depth details of the presented method as well as its application to time evolution
problems.
2.1.3.1 Piecewise polynomial interpolation In order to derive the finite differenceapproximations to the spatial derivatives, a piecewise polynomial interpolant is constructed
that matches the discrete values ui(t) of the function u(x, t) at the grid nodes xi, and whosederivatives are then computed to obtain the sought finite difference formulas. Fig. 2.2.
represents such a piecewise polynomial interpolant formed out of individual polynomial
interpolants Ii(x) which are only valid in their respective domains of validity i. Each of
these domains i includes the corresponding grid node xi and their union is equal to thewhole domain [1, +1] of the problem.
Given a set of grid nodes, the expressions for Ii(x) can readily be obtained through theLagrange interpolation formulae:
Ii(x) =
si+qj=si
ij(x)uj , ij(x) =
qm=0
si+m=j
x xsi+mxj xsi+m
. (2.48)
7/29/2019 2011 AIM ED 03 Theofilis Notes
32/45
26 NUMERICAL SOLUTION METHODS
where qis the polynomial degree andthe seed si istheindexoftheleftmostnode xi involvedin the construction of the interpolant Ii(x). For the case of even polynomial degrees, whichwill be the choice from now on, the following selection of values for si is made:
{si} = {0, . . . , 0 q/2 times
, 0, 1, . . . , N q centered FD
, N q , . . . , N q q/2 times
}. (2.49)
The piecewise polynomial interpolant represented in Fig. 2.2. corresponds to the case of
q = 6 and N = 10. As can be seen from the represented stencils of the individualinterpolants, sufficiently far away from the boundaries, the above selection of seeds leads to
centered finite difference formulas, whereas close to the boundaries the stencils are biased
towards the center of the domain in order to only make use of existing grid nodes.
It should be noted, that in virtue of the uniqueness of the interpolating polynomials, the
finite differences formulas obtained from the differentiation of the piecewise polynomial
interpolant introduced above coincide with the ones obtained by classical means. Thus,
no differences compared to conventional finite difference methods on arbitrary grids exist,
only the way in which they are formulated and derived, but no in the end result.
2.1.3.2 Uniform interpolation errors In the above definition of the piecewise poly-nomialinterpolant thechoice of thegrid nodes xi hasbeen left open so far. However, by theirproper selection it is possible to make the interpolation error of the piecewise polynomial
interpolant to be uniform across the interval [1, +1]. The result is a non-equispaced gridthat is unique for each pair of values ofqand N. This same idea underlies the Chebyshevpolynomials, where the condition that the interpolation error is uniform across the interval
[1, +1] is also imposed, but on a single polynomial interpolant instead [26, 9]. The resultis also a non-equispaced grid, known as the Chebyshev roots or Chebyshev-Gauss quadra-
ture points, that is unique for each value ofN. Both approaches achieve the same result,namely the suppression of the Runge phenomenon that spoils the accuracy of polynomial
interpolations close to the ends of the interpolation interval.
In Fig. 2.3. the resulting grid spacings xi
= xi+1
xi
for the piecewise polynomial
interpolant and for the Chebyshev interpolant are shown for different cases, both of them
normalized with the equispaced grid spacing xi,Eq = 2/N. The details of the algorithmfor the former one can be found in [22], while the derivation of the Chebyshev grids can
be found in any classical textbook on spectral methods or interpolation theory [26, 9]. The
case q = 6 and N = 10 from Fig. 2.2. is shown in Fig. 2.3.(a), where it can be seen thatthe proposed non-uniform grid for the piecewise polynomial interpolant lies in between the
equispaced grid and the Chebyshev grid.
Very enlightening are the following limiting cases: (i) q Nand(ii) q = N. In the firstcase, only a few points O(q) close to the boundaries need to be clustered in order to controlthe interpolation error, while far from the boundaries the grid points are equally spaced, as
seen in Fig. 2.3.(b), where the case of a piecewise polynomial interpolant for q = 6 andN = 30 is shown. In the second case, when q = N, only one interpolating polynomial can
be constructed out of the N+ 1 grid nodes, thus I0(x) = I1(x) = . . . = IN(x). Due to theuniqueness of the interpolating polynomials and the fact that the same error uniformization
strategy is used for the piecewise polynomial interpolant than for the derivation of the
Chebyshev polynomials, both approaches are identical. Thus, in the limit q = N, theproposed piecewise polynomial interpolant with the proposed non-equispaced grid presents
all the properties of spectral collocation methods, especially their spectral accuracy [12, 9].
When q < N, most of the nodes are affected by the presence of the boundaries andthe resulting grid point distributions are in between the two limiting cases. This can be
7/29/2019 2011 AIM ED 03 Theofilis Notes
33/45
SPATIAL DISCRETIZATION 27
-1 0 1
//T
Figure 2.1. The Chebyshev Gauss-Lobatto grid
.
seen in Figure 2.3.(c), where the grid spacing of the proposed non-equispaced grids fordifferent values of qand N = 50 are shown. As the degree of the interpolation increases,the node distribution approaches the Chebyshev grid, while for small values of qit is moreclose to the equispaced grid. Figure 2.3.(d) shows that the minimum grid spacing xminpresent in the proposed non-equispaced grids is always greater than the minimum grid
spacing xmin,Ch of the Chebyshev grid. Moreover, from the figure in can be inferred thatxmin = O (xmin,ChN/q) = O
(qN)1
.
Figure 2.2. Stencils, seeds si, and domains of validity i of the individual polynomial interpolantsIi(x) of a piecewise polynomial interpolation of degree q= 6 on 11 nodes (N = 10). The dashedbox separates the centered stencils from those affected by the presence of the boundaries.
7/29/2019 2011 AIM ED 03 Theofilis Notes
34/45
28 NUMERICAL SOLUTION METHODS
i
x
i
/x
i,Eq
0 1 2 3 4 5 6 7 8 90
0.5
1
1.5
i
x
i
/x
i,Eq
0 5 10 15 20 250
0.5
1
1.5
(a) (b)
q
i
x
i
/x
i,Eq
0 5 10 15 20 25 30 35 40 450
0.5
1
1.5
q /N
q
x
min,C
h/xmin
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
(c) (d)
Figure 2.3. Grid spacing xi = xi+1xi of the non-equispacedgrid for the piecewise polynomialinterpolation (solid line), for the Chebyshev interpolation (dotted line), and for the equispaced grid
(dashed line) normalized with the equispaced grid spacing xi,Eq = 2/Nfor (a) q= 6 andN = 10,(b) q = 6 and N = 30, and (c) q = 10, 20, 30, 40 and N = 50. (d) Variation ofxmin,Ch/xminwith qof the non-equispaced grid for the piecewise polynomial interpolation with N = 50.
7/29/2019 2011 AIM ED 03 Theofilis Notes
35/45
CHAPTER 3
RESULTS
3.1 LNSE IN 1D: THE PLANE POISEUILLE FLOW
The Plane Poiseuille flow, instability of which was first solved by spectral methods in theclassic paper of Orszag [40], serves as the testbed for validations of the numerical methods
discussed herein. This section presents results which may be obtained by the code provided
for the Tutorial work. The linearized Navier-Stokes equations have been discretized using
Chebyshev Gauss-Lobatto spectral collocation and the LAPACK implementation of the QZ
algorithm for the recovery of the entire eigenspectrum. The eigenvalue problem is solved
either in its original generalized form (1.15-1.18) or as the standard EVP which results after
matrix A has been inverted and premultiplied with matrix B (both options are implementedin the code).
Table 3.1. shows the convergence history of the leading eigenmode as a function of
the number of collocation points at Re = 104, = 1. The highly-accurate spectral-element results of Kirchner [29] are also presented for comparison. Figure 3.1. presents the
streamwise perturbation velocity component of the eigenvector, u(y) [12], which can alsobe obtained by course participants using the MATLAB R routines provided as part of theintroductory Lecture.
AIM-Education. By XXX
ISBN A-BBB-CCCCC-D c2011 The Authors
29
7/29/2019 2011 AIM ED 03 Theofilis Notes
36/45
30 RESULTS
3.1.1 Tutorial Exercise I
It is expected that during the Tutorial participants of this course will:
familiarize themselves with the codes provided,
modify the codes to solve the Rayleigh equation for the hyperbolic tangent profile,
u(y) = tanh(y), (3.1)
for which it is necessary to implement a mapping into the differentiation matrices,along the lines presented in (2.39-2.42). Parameters and comparison results are
offered by the classic work of Michalke [37]; this reference is provided to course
participants.
3.2 LNSE IN 2D: PRELIMINARIES - THE 2D HELMHOLTZ EVP
Figure 3.2. shows a result of the numerical solution of the two-dimensional Helmholtz EVP
(1.37) in terms of the convergence history of a high (ny , nz 1) eigenvalue, (/)2 = 34.Besides the CGL spectral collocation method used up to the present point in the exposition,
several high-order finite-difference methods have also been employed, including the FD-q
method discussed in section 2.1.3. Results such as this, and analogous obtained in the
Blasius boundary layer, have established the FD-q method as a viable alternative to the
CGL for the formation and efficient solution of multi-dimensional eigenvalue and singular
value problems [54, 30, 41].
For completeness, figure 3.3. displays the eigenvector corresponding to the eigenvalue
(/)2 = 34. The spatial structure of the corresponding eigenfunction results in the needto use a relatively high number of nodes for its accurate description. This is in contrast with
the first few eigenvalues, which are recovered using ny = nz 10.
3.2.1 Tutorial Exercise II
It is expected that participants of this course will also:
understand the extension to two spatial dimensions of the one-dimensional discretiza-tion scheme provided in the codes, making use of the Kronecker product (1.40)
write their own routines to implement spatial discretization of the Helmholtz eigen-value problem (1.37) in a Cartesianrectangular domain, and use LAPACK subroutines
for the solution of the resulting EVP
compare their results with (1.38) and (1.39).
3.3 LNSE IN 2D: THE BIGLOBAL EIGENVALUE PROBLEM
Implementation of the two-dimensional Laplace operator is an essential first step for the so-
lution of the incompressible BiGlobal eigenvalue problem (1.26-1.29) and its compressible
counterpart.
Some results of a flow problem, the basic flow of which may itself be obtained by
solution of the Poisson equation, are included herein in order to assist course participants
7/29/2019 2011 AIM ED 03 Theofilis Notes
37/45
THE PSE-3D 31
in their development of their own codes. The flow in question is that in a rectangular duct
of cross-sectional aspect ratio A, driven by a constant pressure gradient along the axial(unbounded) direction; the large-aspect-ratio (A ) limit of this configuration is PPF.The global linear instability of the rectangular duct flow was originally studied by Tatsumi
& Yoshimura [50].Consider therectangularduct definedin thedomain = {z [A, A]}{y [1, 1]},
where A is the aspect ratio. A constant pressure gradient in th unbounded axial, x, directiondrives a steady laminar flow which is independent of x and possesses a velocity vectorq = [u(y, z), 0, 0]T; the single velocity satisfies the Poisson equation
22du(y, z) = P/x = c, (3.2)
where 22d = 2/y2 + 2/z 2 and viscous conditions are imposed on all four duct walls.
Taking c = 2 in 3.2 and scaling the result with the value of U at the midpoint of theintegration domain, the Poisson problem may be solved in closed series form [44], which
assists comparison with numerically obtained solutions.
The instability analysis problem is solved by forming the matrix, spatial derivatives
being calculated either by the spectral collocation method based on the Chebyshev Gauss-Lobatto grid (CGL) or the FD-q method at different orders, q. In order to exploit thesparsity of the matrix, the MUMPS package [2, 3] has been used for the serial direct
inversion of the matrix. Subsequently, the Arnoldi algorithm has been employed to extract
the most interesting eigenvalues. Table 3.2. presents convergence history results using the
two methods at a subcritical Reynolds number, Re = 1000, and wavenumber parameter = . In addition, Richardson-extrapolation results are also shown.
3.4 THE PSE-3D
Results of work in progress (P. Paredes) close this lecture. As discussed in the introduc-
tory section, the PSE-3D instability analysis concept is appropriate for flows with strongdependence on two and weak on the third spatial direction. Unlike typically used models
of systems of counter-rotating vortices in which no axial development is permitted and
subsequently either BiGlobal EVPs or DNS in which the axial direction is taken to be ho-
mogeneous, DNS work has demonstrated [11] that different instability behavior is to be
expected when axial vortex-system development is permitted. Motivated by this finding
PSE-3D analysis of an axially evolvingpair of counter-rotating vorticeshas been undertaken
[42].
Figure 3.4. shows linear superposition of such a basic flow and its leading eigenmode.
The main observations made are the non-axisymmetric nature of this perturbation, clearly
seenat large streamwisecoordinate values, as wellas the interaction between the instabilities
on the individual vortices. Further details of this work may be found in the original reference
[42].
3.5 LNSE IN 3D: PRELIMINARIES - THE 3D HELMHOLTZ EVP
Finally, the FD-q method for spatial discretization, in conjunction with the serial version of
the MUMPS [2, 3] package for the direct linear algebra operations has been used to solve
(3.5.) in three spatial dimensions, on a standard workstation (P. Paredes, unpublished).
Figure 3.5. shows one of the eigenvectors corresponding to a large eigenvalue, (/)2 =
7/29/2019 2011 AIM ED 03 Theofilis Notes
38/45
32 RESULTS
Table 3.1. Convergence history of instability analysis of PPF at Re = 104 and = 1, = 0.
N r i
20 0.2343850714231792 0.0013789375577136
40 0.2375263827503545 0.0037385876638924
60 0.2375264888136988 0.0037396705884981
80 0.2375264888205456 0.0037396706231850
100 0.2375264888204468 0.0037396706229840
120 0.2375264888204677 0.0037396706229719
140 0.2375264888204739 0.0037396706229729
Kirchner[29] 0.2375264888204682 0.0037396706229799
-1
-0.5
0
0.5
1
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
u-velocity
y
Re = 10000, = 1
Re
Im
Figure 3.1. Streamwise perturbation velocity component u(y) of plane Poiseuille flow (PPF) atRe = 104, = 1, = 0 [40].
43, such that a non-trivial structure in terms of gradients be obtained. As with its two-dimensional analogue, spatial discretization of the three-dimensional Poisson operator has
been at the heart of the solver for the TriGlobal eigenvalue problem currently used in the
authors research group, first validations results of which have been presented elsewhere
[41].
7/29/2019 2011 AIM ED 03 Theofilis Notes
39/45
LNSE IN 3D: PRELIMINARIES - THE 3D HELMHOLTZ EVP 33
1e-14
1e-12
1e-10
1e-08
1e-06
0.0001
0.01
1
10 100
N
CGL
FD-q04
FD-q08
FD-q12
FD-q16
FD-q20
Figure 3.2. Convergence history of the solution of the Helmholtz eigenvalue problem (1.38) for the
eigenvalue (/)2 = 34, obtained using the Chebyshev Gauss Lobatto and a suite of FD-q methodsof orders 4(4)16. The number of discretization nodes used is the same in both spatial directions and
is denoted by N [54, 30, 41].
Table 3.2. Convergence history of BiGlobal instability analysis of square duct flow at
A = 1, Re = 1000 and = .
CGL FD-q16
N2 r i N2 r i
302 2.9027647730 -0.103535353975 302 2.9027679758 -0.103527154668402 2.9027654432 -0.103524928082 502 2.9027654409 -0.103524924455502 2.9027654495 -0.103524926162 702 2.9027654496 -0.103524924216602 2.9027654518 -0.103524926085 902 2.9027654520 -0.103524925116702 2.9027654528 -0.103524926094 1102 2.9027654529 -0.103524925545
2.9027654556 -0.103524926119 2.9027654547 -0.103524926414
7/29/2019 2011 AIM ED 03 Theofilis Notes
40/45
34 RESULTS
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
-1 -0.5 0 0.5 1
-1
-0.5
0
0.5
1
Figure 3.3. The eigenvector corresponding to (/)2 = 34 in the solution of (1.38). Shown arefive isolines between zero and maximum (solid line) and between minimum and zero (dashed line).
Figure 3.4. The leading linear perturbation u( ,y ,z ) obtained by PSE-3D analysis, superposed atlinearly small amplitudes upon a basic flow u,y,zcomposed of two counter-rotating vortices withslow axial dependence [42].
7/29/2019 2011 AIM ED 03 Theofilis Notes
41/45
LNSE IN 3D: PRELIMINARIES - THE 3D HELMHOLTZ EVP 35
Figure 3.5. The eigenvector of the 3D Helmholtz equation (1.53) pertaining to the eigenvalue
(/)2 = 43.
7/29/2019 2011 AIM ED 03 Theofilis Notes
42/45
7/29/2019 2011 AIM ED 03 Theofilis Notes
43/45
REFERENCES
1. E. Akervik, L. Brandt, D. S. Henningson, J. Hpffner, O. Marxen, and P. Schlatter. Steady solu-
tions of the NavierStokes equations by selective frequency damping. Phys. Fluids, 18:068102,
2006.
2. P.R. Amestoy, I.S. Duff, J. Koster, and LExcellent. A fully asynchronous multifrontal solver
using distributed dynamic scheduling. SIAM Journal of Matrix Analysis and Applications., 1:1541, 2001.
3. P.R. Amestoy, A. Guermouche, J.-Y. LExcellent, and S. Pralet. Hybrid schedulingfor the parallel
solution of linear systems. Parallel Computing, 2:136156, 2006.
4. W. E. Arnoldi. The principle of minimized iterations in the solution of the matrix eigenvalue
problem. Quart. Appl. Math., 9:1729, 1951.
5. D. Barkley, H. M. Blackburn, and S. J. Sherwin. Direct optimal growth analysis for timesteppers.
Int. J. Numer. Meth. Fluids, 57:1435 1458, 2008.
6. D. Barkley and R. D. Henderson. Three-dimensional Floquet stability analysis of the wake of a
circular cylinder. J. Fluid Mech., 322:215241, 1996.
7. F. P. Bertolotti, Th. Herbert, and P. R. Spalart. Linear and nonlinear stability of the Blasius
boundary layer. J. Fluid Mech., 242:441474, 1992.
8. T. R. Bewley. Flow control: New challenges for a new renaissance. Progress in AerospaceSciences, 37:2158, 2001.
9. J.P. Boyd. Chebyshev and Fourier spectral methods. Springer, 1989.
10. M. Broadhurst, V. Theofilis, and S. J. Sherwin. Spectralelementstability analysisof vorticalflows.
page 153158, Bangalore, India, Dec. 2004, 2006. 6th IUTAM Laminar-Turbulent Transition
Symposium.
11. M. S. Broadhurst and S. J. Sherwin. The Parabolised Stability Equations for 3D-flows: Imple-
mentation and Numerical Stability. Appl. Num. Math., 58(7):10171029, 2008.
AIM-Education. By XXX
ISBN A-BBB-CCCCC-D c2011 The Authors
37
7/29/2019 2011 AIM ED 03 Theofilis Notes
44/45
38 REFERENCES
12. C. Canuto, M. Y. Hussaini, A. Quarteroni, and T. A. Zang. Spectral methods in fluid dynamics.
Springer, 1987.
13. A. Dobrinsky and S. S. Collis. Adjoint parabolized stability equations for receptivity prediction.
AIAA Paper 2000-2651, 2000.
14. B. F. Farrell and P. J. Ioannou. Generalized stability theory. Part I: Autonomous operators. J.
Atmos. Sci., 53(14):20252040, 1996.
15. B. F. Farrell and P. J. Ioannou. Generalized stability theory. Part II: Nonautonomous operators.
J. Atmos. Sci., 53(14):20412053, 1996.
16. F. Giannetti and P. Luchini. Structural sensitivity of the first instability of the cylinder wake. J.
Fluid Mech., 581:167197, 2007.
17. G. H. Golub and C. F. van Loan. Matrix Computations. The Johns Hopkins University Press, 3
edition, 1996.
18. P. Hall. Gortler vortices in growing boundary layers: The leading edge receptivity problem,
linear growth and the nonlinear breakdown stage. Mathematica, 37:151189, 1990.
19. T. S. Haynes and H. L. Reed. Simulation of sweptwing vortices using nonlinear parabolised
stability equations. J. Fluid Mech., 405:325349, 2000.20. D. S. Henningson. Stability of parallel inviscid shear flow with mean spanwise variation. Tech-
nical Report TN 1987-57, FFA, 1987.
21. Th. Herbert. Parabolized stability equations. Annu. Rev. Fluid Mech., 29:245283, 1997.
22. M. Hermanns and Hernandez J.A. Stable high-order finite-difference methods based on non-
uniform grid point distributions. International Journal for Numerical Methods in Fluids, 56:233
255, 2008.
23. D. C. Hill. A theoretical approach for the restabilization of wakes. AIAA Paper 920067, 1992.
24. D. C. Hill. Adjoint systems and their role in the receptivity problem for boundary layers. J. Fluid
Mech., 292:183204, 1995.
25. P. Huerre and P. A. Monkewitz. Local and global instabilities in spatially developing flows. Annu.
Rev. Fluid Mech., 22:473537, 1990.
26. E. Isaacson and H. B. Keller. Analysis of Numerical Methods. Dover Publications, 1994.
27. G. Em. Karniadakis and S. J. Sherwin. Spectral/hp element methods for Computational Fluid
Dynamics (2nd ed.). Oxford University Press, 2005.
28. H. B. Keller. Numerical solution of bifurcation and nonlinear eigenvalue problems. In P. Rabi-
nowitz, editor, Applications of Bifurcation Theory, pages 359384. Academic Press, 1977.
29. N.P. Kirchner. Computational aspects of the spectral galerkin fem for the orr-sommerfeld equa-
tion. Int. J. Numer. Meth. Fluids, 32:119137, 2000.
30. S. Le Clainche, P. Paredes, M. Hermanns, and V. Theofilis. On high order finite difference
methods for global instability analysis. Number 4th International Symposium on Bifurcations
and Instabilities in Fluid Dynamics, 18-21 July 2011, Barcelona, Spain.
31. S. Lele. Compact finite difference schemes with spectral- like resolution. Journal of Computa-
tional Physics, 103:1642, 1992.
Top Related