







Languages
Pages
Legal


1
System to Remotely Transport
and Deploy an Unmanned Helicopter
MEM Senior Design Team Number 10
Dr. Paul Y. Oh (Advisor)
Jason Collins (MEM)
Michael Perreca (ECE)
Caitlyn Worthington-Kirsch (MEM)
Drexel Autonomous Systems Laboratory (D.A.S.L.)
December 5, 2007

2
Overview
-Hazardous site rescue effort
-UAV provide observational platform during “Golden Hour”-Not interfere with existing rescue efforts-Rapid unmanned transport and deployment-Adapt to dynamic situation
-Current mission plan gap:Unmanned transport and deployment of UAV systems
http://www.viewimages.com/Search.aspx?mid=51919023&epmid=1&partner=Google
http://newsimg.bbc.co.uk/media/images/44194000/jpg/_44194534_afp203bodybonita.jpg
Goal: Design trailer to carry UAV to scene

3
Notional Video

4
Thresholds and
Requirement Threshold Objective
SizeFit through double
doors (5’ x 7.5’)Fit in rental truck (5’ x 6’
10”)
Minimum towing vehicle 350cc ATV 90cc ATV
Protect UAV during transport Dirt road Off road
Launch prep time 2 Minutes 1 Minute
Weather protectionModerate rain =
0.0025 in/min Heavy rain = 0.01 in/min
UAV launch angle TBD +/- 2 Degrees
UAV typeSR-20 6 foot rotor, 21 lbs
SR-1006.5 foot rotor, 35 lbs
Objectives

5
System Overview
Enclosure framework
Leveling gimbal
SuspensionTrailer
6
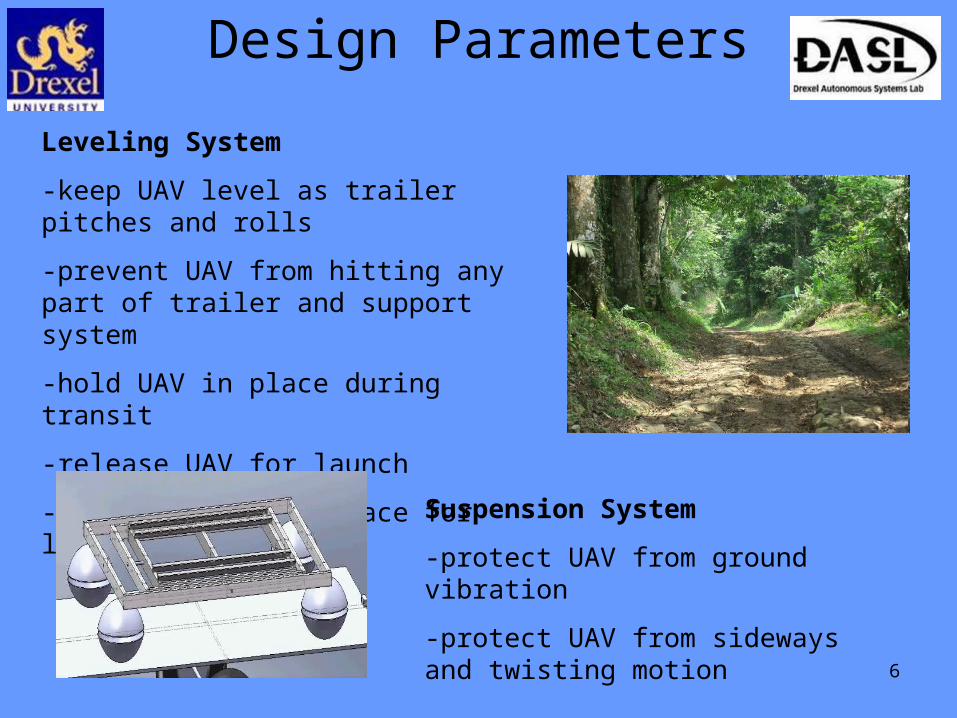
Design Parameters
Leveling System
-keep UAV level as trailer pitches and rolls
-prevent UAV from hitting any part of trailer and support system
-hold UAV in place during transit
-release UAV for launch
-hold platform in place for launch
Suspension System
-protect UAV from ground vibration
-protect UAV from sideways and twisting motion

7
Design Parameters
Trailer Base and Enclosure
-fit through double doors (60") -protect UAV from debris and weather
-use a standard trailer hitch -towable by 90 cc displacement ATV
-fit inside a cargo van for long-distance transportation
Actuator Electronics System
-remotely actuate and monitor system electronics

8
Technical Requirements
Leveling System:Level UAV platform to within +/- 2 degreesLock platform angle during takeoff
Suspension System:Support approximately 100 lbsReduce vibration at 5HzReduce vibration by at least 90%
Trailer/Enclosure:Maximum width 60”Shed minimum of 4mm/hr of rain
Data Acquisition System:14 I/O PortsRemote range of 300ft
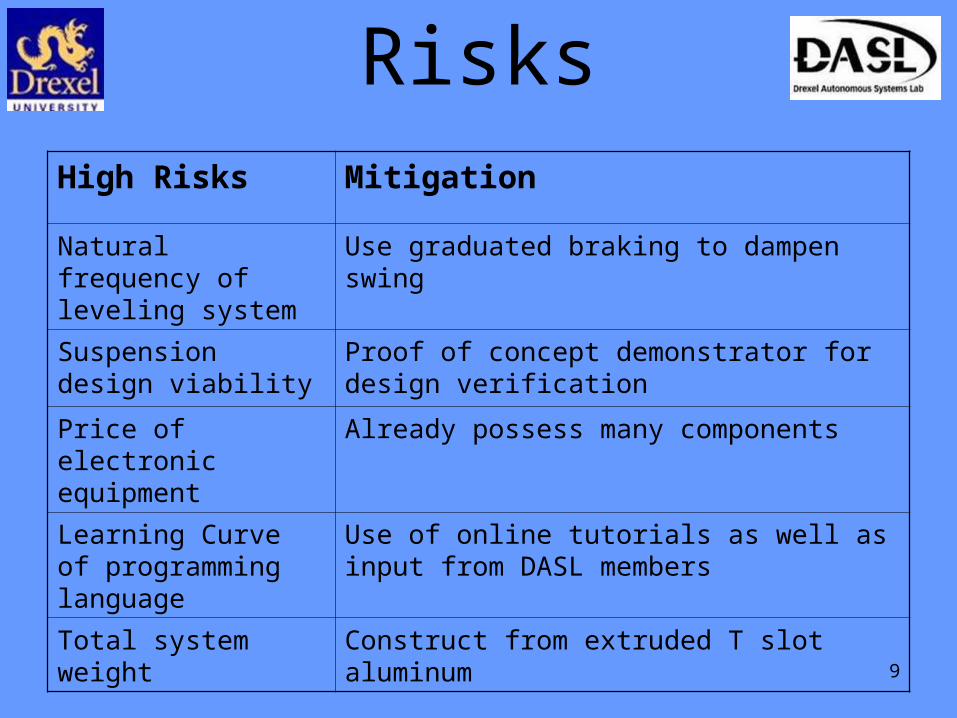
9
High Risks Mitigation
Natural frequency of leveling system
Use graduated braking to dampen swing
Suspension design viability
Proof of concept demonstrator for design verification
Price of electronic equipment
Already possess many components
Learning Curve of programming language
Use of online tutorials as well as input from DASL members
Total system weight Construct from extruded T slot aluminum
Risks

10
Medium Risks MitigationGimbal exceeding maximum rotation
Use graduated braking and bump stops to dampen swing
Ability to tune suspension system
Proof of concept demonstrator for design verification
Electrical component availability
Determine need equipment at an early date to allow for acquisition
Trailer availability Work hand in hand with local manufacturers
Risks
Low Risks Mitigation
System power requirements
DC-DC converters available
Analog signal capture Demonstrated on proof on concept demonstrator

11
Leveling System
Proposed Solution-Gimbal system to level platform
-Breaks to dampen oscillation
-Bump stops to prevent over travelGimbal Demonstrator Natural Response
-40
-20
0
20
40
0
0.3
3
0.6
6
0.9
9
1.3
2
1.6
5
1.9
8
2.3
1
2.6
4
2.9
7
3.3
3.6
3
3.9
6
4.2
9
Time in seconds
De
gre
es
Roll
Pitch

12
Dampening System
Initial design: a classic spring-dashpot system
Only moves along one axis
Allowing sideways movement - unstable
Multiple systems for different axes – too complex
A compressible sphere moves on all axes and is simple, but still unstable
Bowls made the ball design stable and adaptable
Design

13
Dampening System
Proposed Solution
Proof-of-concept
Compressible ball between two bowls
Allows for sideways and twisting movement
Transference of approximately 5% of vibration at 5 Hz
Tunable for varying conditions by inflating and deflating ball
Cad model

14
Data Acquisition andActuation Electronics
Possible Solution
Electronics QFD

15
National Instruments Compact RIO- On-board data manipulation
- Expandable through the use of NI C-Series Modules
- 50 g shock rating
- Temperature rating between -40 and 158 °F- Proven to process analog signals by the proof of concept
- Readily available from D.A.S.L.
Data Acquisition andActuation Electronics
Proposed Solution
NI Compact RIO

16
Trailer and Enclosure
Possible SolutionsOption
1Option
2Option
3Option
4
Price: (20%) 15% 10% 5% 20%
Availability: (30%)
20% 10% 5% 30%
Flexibility:
(5%)
5% 5% 1% 5%
Ease of Adaptation (15%)
15% 15% 5% 15%
Group Man-hours: (30%)
20% 20% 30% 5%
Total (100%)
75% 60% 46% 75%
Option 1: 56” x 55” Deck over trailer
Option 2:56” x 7'6” Deck over trailer
Option 3:56” x 7'6” Deck over with box enclosure already installed
Option 4:Custom built trailer by Senior Design Group
Trailer/Enclosure QFD

17
TimelineJan 14 – Design Freeze
Jan 21 – all parts sourced and ordered
Jan 28 – Begin building trailer, testing components as they are built
Feb 11 – Gimbal built
Feb 18 – Vibration control system built
Feb 25 – Enclosure built
Mar 10 – Full trailer testing begins
May 5 – Final report and end of project

18
Projected Market
Projected production price: $5,000 per unit
Helicopter price: $40,000 per unit
UAV transportation is a common problem in the field
Over 80 companies are developing different UAVs, and over 5,000 UAVs are in use today*
As UAVs gain popularity, producing a reliable means of off-road transportation is a viable profit source.
*http://www.uavforum.com/library/librarian.htm

19
Budget
Total project expenses, including salaries: $105,000
Total project expenses, excluding salaries: $10888
Actual expenditure: approx. $3000
Options represent high-end, mid-range, and low-end prototypes
Options in:
Frame and gimbal materials
Enclosure material
Trailer base

20
Deliverables-Leveling system
-Data Acquisition and
Actuation Electronics
-Suspension system
-Enclosed Trailer
-Testing Results
-Final Design Report
21
Acknowledgements
Dr. Paul Y. Oh
D.A.S.L. Members
MEM Senior Design Committee
ECE Senior Design Committee
All Those in Attendance
22
Thank YouQuestions?
?

23
Gantt Chart

24
Top Related