






![Atmel AT06475: SAM D21 USB - Microchip Technologyww1.microchip.com/downloads/.../Atmel-42261-SAM-D21... · AT06475: SAM D21 USB [APPLICATION NOTE] 42261A−ARM−03/2014 4 Figure](https://static.fdocuments.us/doc/165x107/5eb8bb248958705a235105a3/atmel-at06475-sam-d21-usb-microchip-at06475-sam-d21-usb-application-note-42261aaarma032014.jpg)
Languages
Pages
Legal


© 2013 Atmel1
SAM D21 Peripheral Touch Controller
Noise Immunity
2 © 2013 Atmel
• Impact of noise on a touch application• Noise sources• Noise immunity standard
• Peripheral Touch Controller noise immunity features• Pre-processing and post-processing features
• Serial Resistor (Rs)• Detect Integration (DI)
• Acquisition Features• Filter_Level• Auto Oversampling (Auto_OS)• Frequency Hopping
• Video : 10VCI Bench
• Conclusion
Presentation Outline

3 © 2013 Atmel
Impact of noise on a Touch application

4 © 2013 Atmel
Radiated NoiseDefinition
Radiated noise correspond to unwanted ’noisy’ RF voltages emitted by external element from the system.
Fluorescent lamp
Induction plate
5 © 2013 Atmel
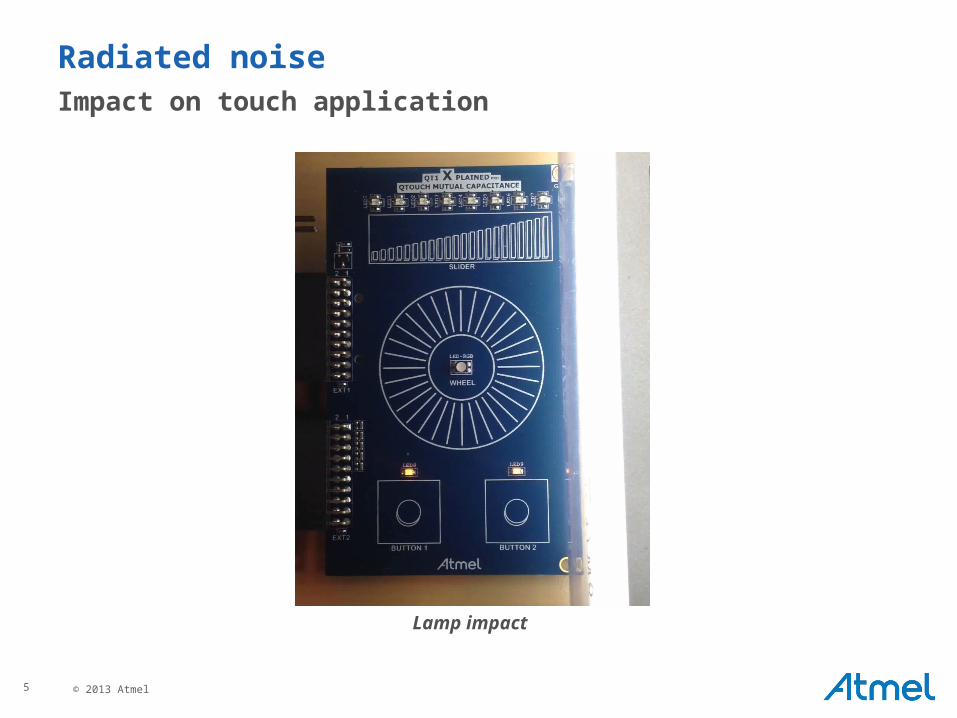
Radiated noiseImpact on touch application
Lamp impact
6 © 2013 Atmel
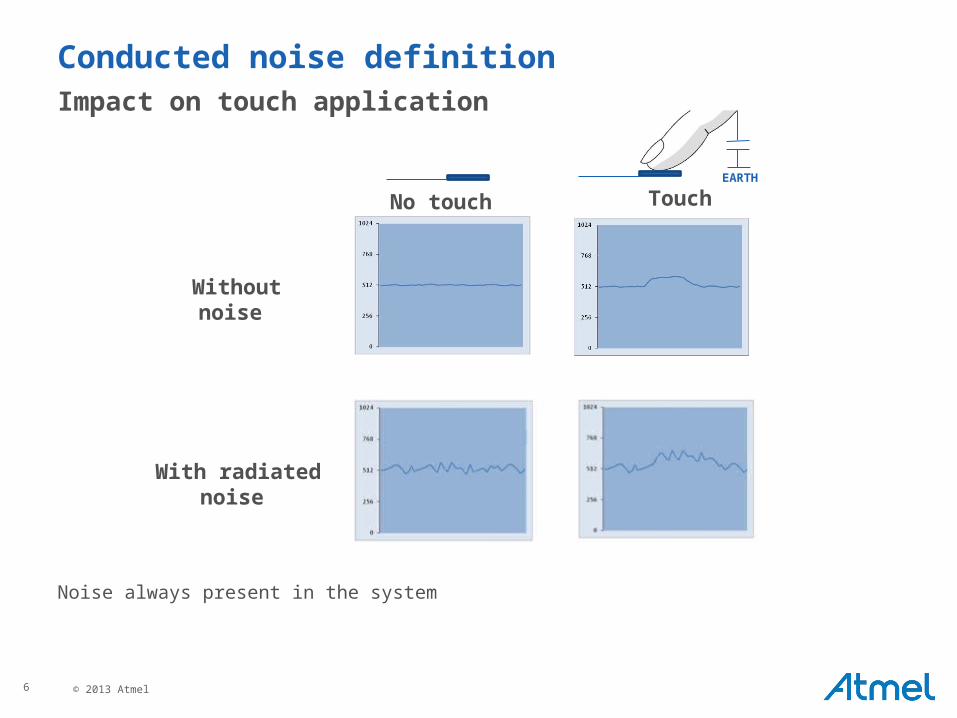
Conducted noise definition Impact on touch application
EARTH
Without noise
With radiated noise
No touch Touch
Noise always present in the system

7 © 2013 Atmel
Conducted noiseDefinition
Conducted noise correspond to unwanted ’noisy’ RF voltages and currents carried by its external wires and cables. Common mode noise
8 © 2013 Copyright Atmel Corporation
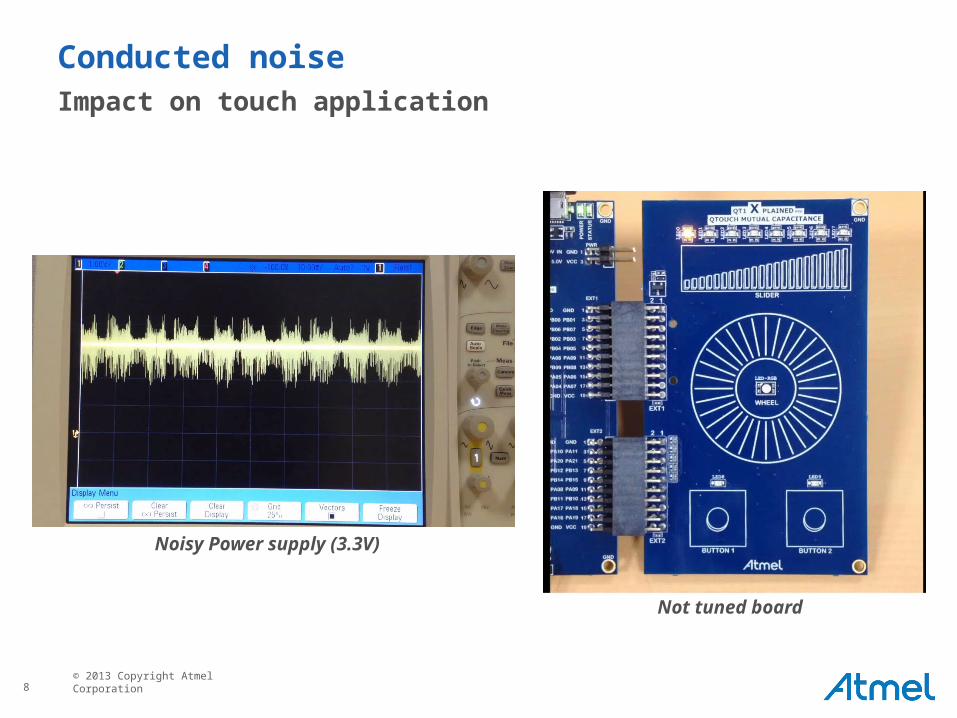
Conducted noiseImpact on touch application
Noisy Power supply (3.3V)
Not tuned board

9 © 2013 Copyright Atmel Corporation
Conducted noise definition Impact on touch application
EARTH
Without noise
With conducted noise
No touch Touch
power supply lines maintain a stabledifference between VDD and GND
user’s finger now provides a returnpath and effectively couples noise directly
into the capacitive sensor

10 © 2013 Copyright Atmel Corporation
• Define Common reference and a set of testing methods• Modulated RF signal stepped over the frequency range from 150kHz to
80MHz. • At each step there is a ’dwell period’ whilst the EUT (Equipment Under
Test) is checked for performance degradation.
• Result classifications :
• Class A – No significant degradation.• Class B – Degradation in operation but the product fully recovers once the stress
is removed without any operator intervention. (no loss of data)• Class C – Operation is affected and operator intervention is required (no loss of
data)• Class D – Unrecoverable loss of function or degradation of performance. Loss of
data may occur.
Noise immunityInternational Standard IEC/EN 61000-4-6

11 © 2013 Copyright Atmel Corporation
PTC noise immunity features
12 © 2013 Copyright Atmel Corporation
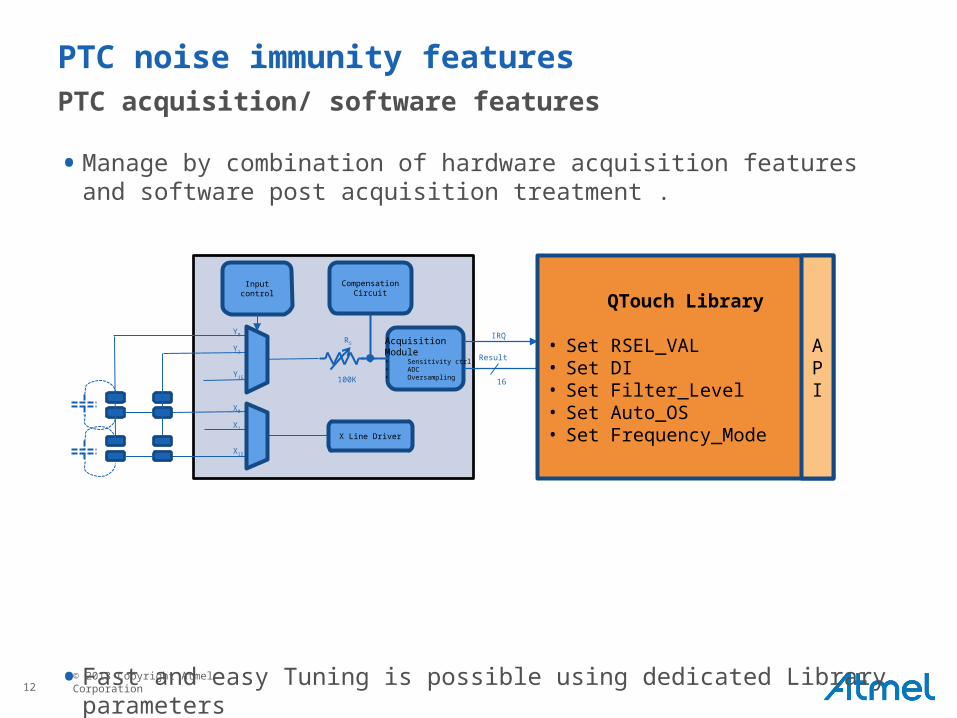
• Manage by combination of hardware acquisition features and software post acquisition treatment .
• Fast and easy Tuning is possible using dedicated Library parameters
PTC noise immunity featuresPTC acquisition/ software features
100K 16
IRQAcquisitionModule• Sensitivity ctrl• ADC• Oversampling
RS
CompensationCircuit
X Line Driver
Input control
Y0
Y1
Y15
Result
X0
X1
X15
QTouch Library
• Set RSEL_VAL• Set DI• Set Filter_Level• Set Auto_OS • Set Frequency_Mode
API

13 © 2013 Copyright Atmel Corporation
PTC noise immunity featuresPost-processing and pre-processing features

14 © 2013 Copyright Atmel Corporation
• Increasing the impedance of the signal path can significantly improve immunity to conducted noise while maintaining the overall signal integrity.
• Intermediate resistor value can be chosen to achieve the required level of noise suppression while meeting other system design requirements such as power consumption and response time.
PTC noise immunity featuresSerial Resistor (RSEL_VAL_x)
1-100k
AcquisitionModule• Sensitivity ctrl• ADC• Oversampling
RS
CompensationCircuit
X Line Driver
Input control
Y0
Y1
Y15
X0
X1
X15
15 © 2013 Copyright Atmel Corporation
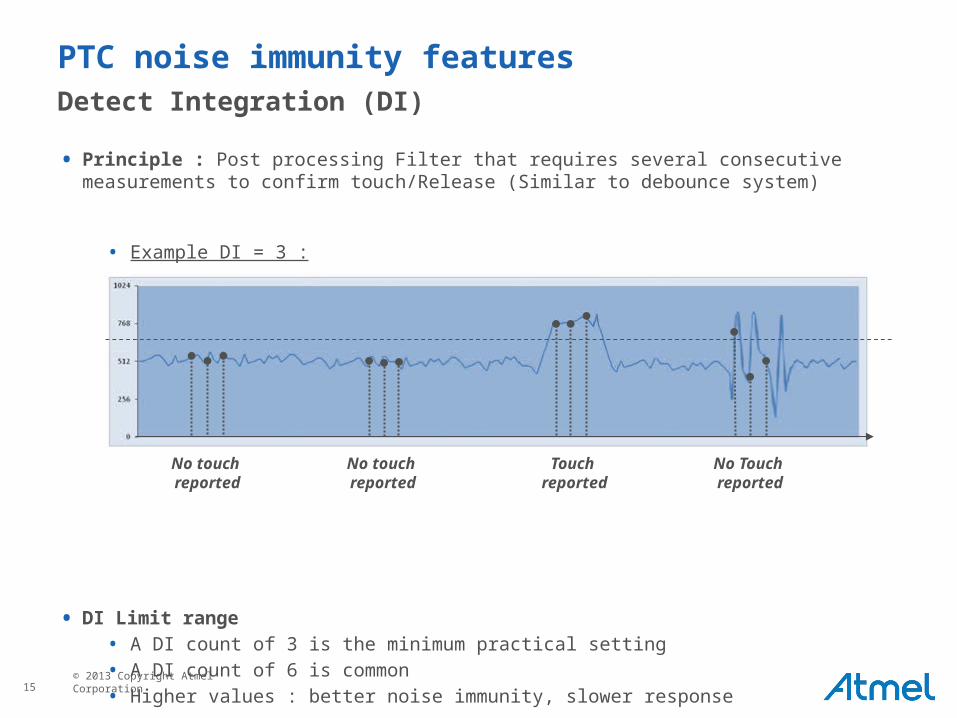
• Principle : Post processing Filter that requires several consecutive measurements to confirm touch/Release (Similar to debounce system)
• Example DI = 3 :
• DI Limit range • A DI count of 3 is the minimum practical setting • A DI count of 6 is common • Higher values : better noise immunity, slower response
PTC noise immunity featuresDetect Integration (DI)
No touch reported
No touch reported
Touch reported
No Touch reported

16 © 2013 Atmel
Illustration : 10CI Bench Video

17 © 2013 Atmel
Illustration : 10CI Bench VideoBench description
Application to test
Test Software
Coupling / decoupling network
Power amplifier
10cm standoff
from earth plane
CI Signal Generator

18 © 2013 Atmel
Illustration : 10CI Bench Video Test 1 : Test Application without noise • Configuration : Filter_Level = 4
• Result: Good and fast operation
19 © 2013 Atmel
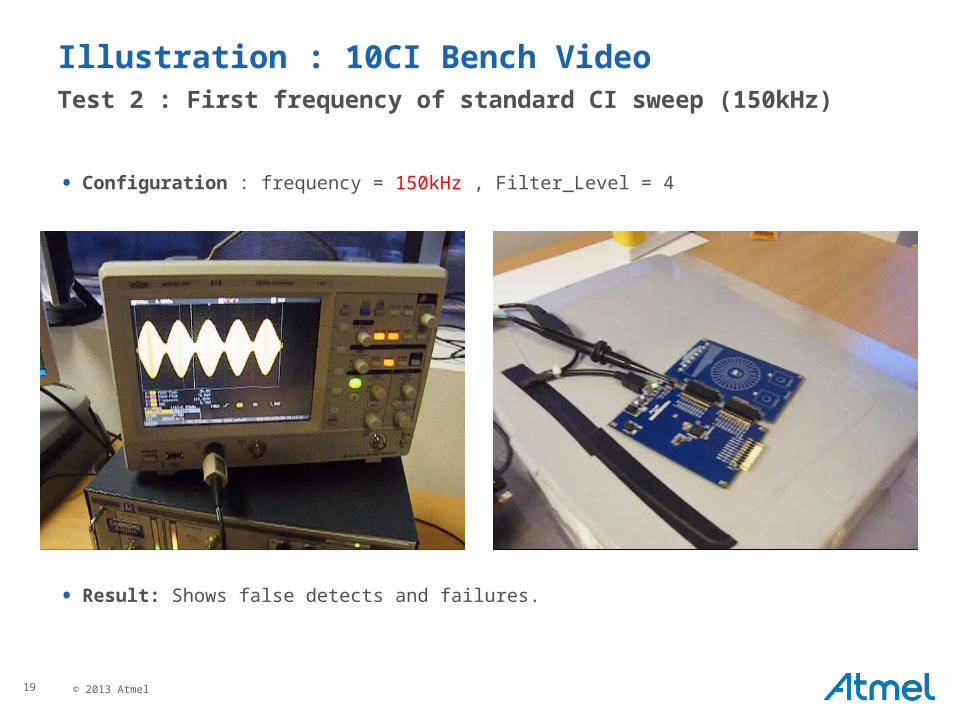
• Configuration : frequency = 150kHz , Filter_Level = 4
• Result: Shows false detects and failures.
Illustration : 10CI Bench VideoTest 2 : First frequency of standard CI sweep (150kHz)

20 © 2013 Atmel
• Configuration : Frequency = 150kHz, Rs = 100k, Filter_Level = 32
• Result: Works very well
Illustration : 10CI Bench VideoTest 3 : First frequency of standard CI sweep (150kHz)

21 © 2013 Copyright Atmel Corporation
Illustration : 10CI Bench VideoTest 5 : Test frequency = 265kHz
• Configuration : frequency = 256kHz, Rs = 100k, Filter_Level = 32
• Result: Shows false detects, failures

22 © 2013 Copyright Atmel Corporation
Illustration : 10CI Bench VideoTest 5 : Test frequency = 265kHz
• Configuration : Frequency = 256kHz , Rs = 100k , Filter_Level = 64, Auto_OS = 8
• Result: Works very well

23 © 2013 Copyright Atmel Corporation
Illustration : 10CI Bench VideoTest 6 : Test frequency = 267kHz (Harmonic Close to Oversampling 266.67kHz)
• Configuration : Frequency = 267kHz , Rs = 100k , Filter_Level = 64, Auto_OS = 8
• Result: Shows flickering on both keys and slider LEDs

24 © 2013 Copyright Atmel Corporation
Illustration : 10CI Bench VideoTest 7 : Test frequency = 267kHz (Harmonic Close to Oversampling 266.67kHz)
• Configuration : Frequency = 267kHz , Rs = 100k , Filter_Level = 64, Auto_OS = 8 Frequency hopping enabled
• Result: Works very well
25 © 2013 Copyright Atmel Corporation
• When dealing with noise immunity, It is important to understand the environment in which the touch application is designed to operate in, and where appropriately apply suitable techniques to address the effects of unwanted noise disturbances.
• The Peripheral touch controller embed in SAM D21 and associated Software Library provide key features for building suitable touch application with techniques to overcome noise disturbance .
03/04/2013Introducing Atmel SAM D20 Flash MCUs
Conclusion

Top Related