Z Transform f2014

of 49
-
Upload
prasanth-pillai -
Category
Documents
-
view
242 -
download
0
Transcript of Z Transform f2014
-
8/9/2019 Z Transform f2014
1/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
1 / 49
Z- Transform
Definition of (the bilateral) z-transform
The z-transform of the sequence x(n) is denoted by X(z), and is defined as:
The inverse transform of X(z) is x(n). This is expressed as:
The Region of Convergence
Since the z-transform is an infinite power series, it exists only for those values of z for which this series converges.The region of convergence (ROC) of X(z) is the set of all values of z for which X(z) attains a finite value. Thus any
time a z-transform is cited, the ROC should also be indicated.Example
Determine the z-transforms of the following finite-duration sequences:
a)
b)
c)
d)
e)
f) ,
X z x n z n
n =
=
Z1
X z x n =
x1 n 1 2 5 7 0 1 =
x2 n 1 2 5 7 0 1 =
x3 n 0 0 1 2 5 7 0 1 =
x4 n 2 4 5 7 0 1 =
x5 n n =
x6 n n k = k 0
-
8/9/2019 Z Transform f2014
2/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
2 / 49
g) ,
Solutiona) , ROC: entire z-plane except
b) , ROC: entire z-plane except and
c) , ROC: entire z-plane except
d) , ROC: entire z-plane except and
e) , ROC: entire z-plane
f) , ROC: entire z-plane except
g) , ROC: entire z-plane except
From the above example it can be concluded that the ROC of a finite duration signal is the entire z-plane exceptpossibly for the points and/or
In many cases the sum of the infinite series X(z) can be expressed in a closed form expression.
Example
Determine the z-transform of the real exponential sequence
Solution
x6 n n k+ = k 0
X1 z 1 2z1 5z 2 7z 3 z 5+ + + += z 0=
X2 z z2 2z 5 7z 1 z 3+ + + += z 0= z =
X3 z z2 2z 3 5z 4 7z 5 z 7+ + + += z 0=
X4 z 2z2 4z1 5 7z 1 z 3+ + + += z 0= z =
X5 z 1=
X6 z z k= z 0=
X7 z zk= z =
z 0= z =
x n 12---
nu n =
X z x n z n
n =
12---
n
z n
n 0=
12---z 1
n
n 0=
112---z 1
12---z 1
2
12---z 1
n
+ + + + += = = =
-
8/9/2019 Z Transform f2014
3/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
3 / 49
The right hand side of the above equation is an infinite geometric series, the sum of which converges when is
less than 1.
, ROC:
For this example we notice that 1) the sequence is causal, and 2) the region of convergence is all points in the z-plane
that fall outsideof a circle of radius
Example
Determine the z-transform of the real exponential sequence
Solution
ROC
For this example we notice that 1) the sequence is anti-causal, and 2) the region of convergence is all points in the z-plane that fall insideof a circle of radius
12---z 1
X z 1
112---z 1
-------------------=12---z 1 1 z
12---
r1
2
---=
x n 2nu n 1 =
X z x n z n
n =
2nz n
n =
1
2 1z ll 1=
2 1z 2 1z 2 2 1z n + + + +
2 1z 1 2 1z 2 1z 2 2 1z n + + + + + 21z
1 2 1z-------------------
1
1 2z 1-------------------
= = = = =
= =
2 1z 1 z 2
r 2=
-
8/9/2019 Z Transform f2014
4/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
4 / 49
More on the Region of Convergence:
In the case of an infinite sequence, the infinite series that defines X(z) can be split into two parts as shown above. Thefirst sum accounts for the samples of x(n) for , which converges only for points in the z-plane where issmall enough (< some positive real number r). The second sum accounts for the samples of x(n) for , which
converges only for points in the z-plane where is large enough (> some positive real number r). The region ofconvergence for X(z) is the annular region between the two circles with radii r1and r2provided that .
X z x n z n
n =
x n z n
n =
1
x n z n
n 0=
+ x n zn
n 1=
x n z n
n 0=
+= = =
X z x n zn
n 1=
x n z n
n 0=
+ x n zn
n 1=
x n z n
n 0=
+=
n 1 z0 n
z
r1 r2
X z x n zn
n 1=
x n
zn-------------
n 0=
+
converges for |z| < r2 converges for |z| > r1
-
8/9/2019 Z Transform f2014
5/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
5 / 49
Example
Determine the z-transform of the signal
Solution
r1r2 r1
r2
ROC for
x n z n
n =
1
ROC for
x n z n
n 0=
ROC for
x n z n
n =
1
x n z n
n 0=
+
x n anu n bnu n 1 +=
X z x n z n
n =
bnz n
n =
1
anz n
n 0=
+ b nzn
n 1=
anz n
n 0=
+= = =
-
8/9/2019 Z Transform f2014
6/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
6 / 49
ROC1:
ROC2:
ROC: annular region of the z-plane between a circle of radius |a| and a circle of radius |b| provided that . If thiscondition does not hold, X(z) will not exist.
Z-transform of some Special Sequences
The unit sample sequence
Shifted Unit Sample
b nzn
n 1=
b 1z 1 b 1z b 1z 2 b 1z n + + + + + b 1z
1 b 1z------------------- 1
1 bz 1-------------------= = =
b 1z 1 z b
anz n
n 0=
1 az 1 az 1 2 az 1 n + + + + +1
1 az 1-------------------= =
az 1 1 z a
X z 11 bz 1-------------------
1
1 az 1-------------------+=
b a
X z Z n z0
1= = =
X z Z n m z m
= =
-
8/9/2019 Z Transform f2014
7/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
7 / 49
Right Sided (aka causal) Sequences
RSS are zero for
The general complex exponential sequence where A, a and 0are real constants.
with a ROC
.
The transforms for a number of special sequences can be obtained from the general exponential sequence discussedabove.
n 0
x n Aanej0n
u n =
X z Aanej0n
z n
n 0=
A aej0
z1
n
n 0=
A
1 aej0
z1
-----------------------------= = =
aej0
z1
1 z a
ROC
imag
real
|a|Z-plane
-
8/9/2019 Z Transform f2014
8/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
8 / 49
Unit Step Sequence :
Substitute , to obtain:
with a region of convergence (ROC) described by
Real Exponential Sequence
To find X(z) substitute . The transform of the real exponential is
with a ROC
General Oscillatory Sequence
with a ROC
x n u n =
A a 0 1 1 0 =
X z u n z n
n 0=
1
1 z1
----------------= =
z 1
x n anu n =
A 0 1 0=
X z anz n
n 0=
A az1
n
n 0=
1
1 az1
-------------------= = =
z a
x n Aan 0n cos u n A
2---a
nej0nu n A
2---a
ne
j0n u n += =
X z Z A2---a
nej0n
u n
z A
2---a
ne
j0nu n
+
A 2
1 aej0z 1----------------------------- A 2
1 ae j0 z 1-------------------------------+
A 1 az1 0cos
1 2az 1 0cos a2z 2+----------------------------------------------------------
= =
=
z a
-
8/9/2019 Z Transform f2014
9/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
9 / 49
Table of transform pairs (reproduced from table 3.3, Proakis and Manolakis)
time sequence x(n) z-Transform X(z) ROC
n 1 allz
u n 11 z 1---------------- z 1
anu n 11 az 1------------------- z a
nanu n az 1
1 az 1 2--------------------------- z a
anu n 1 11 az 1------------------- z a
nanu n 1 az 1
1 az1
2
--------------------------- z a
0ncos u n 1 z 1 0cos
1 2z 1 0cos z2+
------------------------------------------------- z 1
0sin n u n z 1 0sin
1 2z 1 0cos z2+
------------------------------------------------- z 1
an 0ncos u n 1 az1
0cos1 2az 1 0cos a
2z 2+---------------------------------------------------------- z a
an 0nsin u n az 1 0sin
1 2az 1 0cos a2z 2+
---------------------------------------------------------- z a
A
1 pz 1-------------------
A
1 pz 1----------------------+2A p
n n p A+ cos u n z a
-
8/9/2019 Z Transform f2014
10/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
10 / 49
Properties of the Z-transform
1)Linearity
The transform is linear in the sense that if , then
where {Ck} are arbitrary constants, and where .
To prove it:
The region of convergence of Y(z) is that part of the z-plane over which all of {Fk(z)} converge; i.e. it is theintersection of all ROCs associated with {Fk(z)}.
Example
Starting with the transform pair , with a ROC , determine the transform of the
sequence
Solution:
y n Ckfkn k
=
Y z Z Ckfkn k
CkZ fkn k
CkFk z k
= = =
Z fkn Fk z =
Y z Ckfkn
k
z n
n =
Ck fkn z n
n =
k
Ck Fk z k
= = =
Aan
e
j0n
u n A
1 aej0
z1
----------------------------- z a
x n an 0nsin u n =
x n an 0nsin u n an e
j0n e j0n
2j
------------------------------- u n 1
2j
-----anej0nu n 1
2j
-----ane j0n u n = = =
-
8/9/2019 Z Transform f2014
11/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
11 / 49
,
2) Time Shifting
The sequence y(n) is a time-shifted version of another sequence f(n) according to the relation: wherem is an integer.
The transform of y(n) is related to that of f(n) according to:
To prove it:
In the above equation change variables according to and therefore
The ROC for Y(z) is the same as the ROC of F(z), with the addition of the constraint if m is positive or if mis negative.
X z Z 12j-----anej0nu n
Z12j-----ane j0n u n
+=
X z
12j-----
1 aej0z 1-----------------------------
12j-----
1 ae j0 z 1-------------------------------
12j----- ej0 e j0 az 1
1 a ej0 e j0+ a2z 2+----------------------------------------------------------------
az 1 0sin
1 2az 1 0cos a2z 2+
----------------------------------------------------------= = = z a
y n f n m =
Y z Z f n m z m F z = =
Y z f n m z n
n =
=
k n m= n k m+=
Y z f k z k m+
k =
z m f k z kk =
z m F z = = =
z 0 z
-
8/9/2019 Z Transform f2014
12/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
12 / 49
Example
A discrete time system is described by the input/output relationship
Determine the z-transform of the output, Y(z), in terms of the transform of the input, X(z).
Solution
3)Differentiation in the z-domain
If y(n) is related to f(n) according to: , then the transform of y(n) is given by:
Proof
The ROC for Y(z) is the same as the ROC for X(z)
y n bkx n k
k 0=
8
8=
Y z Z bkx n k
k 0=
8
8
18--- bkZ x n k
k 0=
8
18--- bkz
kX z
k 0=
8
bkz k
k 0=
8
8----------------------- X z = = = =
y n nx n =
Y z Z nx n zzdd
X z = =
zdd
X z zdd
x n z n
n =
x n zdd
z n
n =
nx n z n 1n =
z 1 nx n z nn =
z 1 F z = = = = =
-
8/9/2019 Z Transform f2014
13/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
13 / 49
4) Time Reversal
Assume that ; i.e. y(n) is a time reversed version of x(n). Also assume that the ROC for X(z) is
The transform of y(n) is related to the transform of x(n) according to:
, ROC:
Proof
ROC:
5) Convolution of two sequences
Let y(n) be: . The transform of y(n) is then given by the product of transforms of both x(n) andh(n). i.e.
The ROC of Y(z) is the part of the z-plane over which both X(z) and H(z) do converge.
y n x n = r1 z r2
Y z X 1z---
=
1r2---- z
1r1----
Y z x n z n
n =
x k zkk =
x k z 1 kk =
X z 1 X1z---
= = = =
r11z--- r2
1r2---- z
1r1----
y n x n h n =
Y z Z x n h n Z x n Z h n X z H z = = =
-
8/9/2019 Z Transform f2014
14/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
14 / 49
Proof
6) Initial Value Theorem
If x(n) is causal (i.e. for ), then
Proof
Since x(n) is causal,
as , for and the right hand side of the equation above is reduced to x(0).
Y z x k h n k k =
z n
n =
x k h n k z n
k =
k =
H z x k z k
k =
= = =
x n h n z kH z
x n 0= n 0
x 0 X z z lim=
X z x n z n
n 0=
x 0 x 1 z 1 x 2 z 2 x n z n + + + + += =
z z n 0 n 1
-
8/9/2019 Z Transform f2014
15/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
15 / 49
Inverse Z-transform
Inverse Transform by Power Series Expansion
The basic idea is that we are given a transform X(z) with a specified region of convergence. We can expand X(z) intothe form:
which converges in the given ROC. By the uniqueness of the transform, , for .
When X(z) is rational (i.e. ratio of two polynomials in z), the power series expansion can be achieved by long division.
Example
Determine the inverse transform of when the ROC is
Solution: Since the ROC is , we know we are looking at a causal sequence. As such, we are looking for a series
expansion of the form
X z cnz n
n =
=
x n cn= n
X z az1
1 az 1 2---------------------------= z a
z a
X z cnz n
n 0=
=
-
8/9/2019 Z Transform f2014
16/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
16 / 49
Therefore
, for
az 1
az 1 2a2z 2 a3z 3+
2a2z 2 a3z 3
2a2z 2 4a3z 3 2a4z 4+
3a3z 3 2a4z 4
3a3z 3 6a4z 4 3a5z 5+
4a4z 4 3a5z 5
4a4z 4 8a5z 5 4a6z 6+
5a5z 5 4a6z 6
az 1 2a2z 2 3a3z 3 4a4z 4 5a5z 5 + + + + +
1 2az 1 a2z 2+
5a5z 5 10a6z 6 5a7z 7+
X z az 1 2a2z 2 3a3z 3 4a4z 4 5a5z 5 nanz n + + + + + + +=
x n nan= 0 n
-
8/9/2019 Z Transform f2014
17/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
17 / 49
ExampleDetermine the inverse transform of when the ROC is
Since the ROC is , we know we are looking at an anti-causal sequence. As such, we are looking for a series
expansion of the form
X z az 1
1 az 1 2---------------------------= z a
z a
X z cnzn
n 0=
=
az 1
a1z 1 2 a 1z1+
2 a 1z1
2 4a 1z1 2a 2z2+
3a 1z1 2a 2z2
3a 1z1 6a 2z2 3a 3z3+
4a 2z2 3a 3z3
4a 2z2 8a 3z3 4a 4z4+
5a 3z3 4a 4z4
a 1z1 2a 2z2 3a 3z3 4a 4z4 5a 5z5 + + + + +
a2z 2 2az 1 1+
5a 3z3 10a 4z4 5a 5z5+
-
8/9/2019 Z Transform f2014
18/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
18 / 49
for
, for
Others:read example 3.4.2, text
The inverse by Partial Fraction Expansion
X(z) is a rational function of the form:
The rational function above is proper if and . Note that an improperrational function (because
can always be written as the sum of a rational function and a polynomial. For example,
In general terms, a rational function X(z) can always be written as a sum of a polynomial and a proper rationalfunction. The inverse transform of X(z) is equal to the sum of:
The inverse transform of the polynomial part which is obtained by inspection.
X z a 1z1 2a 2z2 3a 3z3 4a 4z4 5a 5z5 na nzn + + + + + + +=
x n na n= 0 n
x n nan= 1 n
x n nan u n 1 =
X z b0 b1z
1 b2z1 bMz
M+ + + +
1 a1z 1 22z 1 aNz N+ + + +-------------------------------------------------------------------------------=
aN 0 M N M N
2 z 2
1 z 1---------------- 1 z 1
1
1 z 1----------------+ +=
properimproper
polynomial
-
8/9/2019 Z Transform f2014
19/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
19 / 49
The inverse of the proper rational function. It is for this part that we need to do partial fraction expansion.
How does Partial Fraction Expansion Work
1) To start, assume that we have a proper rational function in of the form:
2) To simplify the steps to follow, re-write X(z) as a function of (as opposed to :
We notice that as given above is a proper rational function.
3) Next we determine the roots of the denominator polynomial, by solving:
Assume that the roots determined above are located at
At this point we need to consider two different scenarios
The case of distinct roots
We assume that all roots are distinct. In this case, , can be written as a sum of N first order fractions
z 1
X z b0 b1z
1 b2z1 bMz
M+ + + +
1 a1z1 22z
1 aNz N+ + + +
-------------------------------------------------------------------------------=
z z 1
X z b0z
N b1zN 1 b2z
N 2 bMzN M+ + + +
zN a1zN 1 a2z
N 2 aN 1 z aN+ + + + +-----------------------------------------------------------------------------------------------------=
X z z
----------- b0z
N 1 b1zN 2 b2z
N 3 bMzN M 1+ + + +
zN a1zN 1 a2z
N 2 aN 1 z aN+ + + + +------------------------------------------------------------------------------------------------------------------=
X z z-----------
zN a1zN 1 a2z
N 2 aN 1 z aN+ + + + + 0=
z p1 p2 p3 pN =
X z z
-----------
-
8/9/2019 Z Transform f2014
20/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
20 / 49
The constants are determined as follows:
After the constants have been determined, write X(z) in the form
Aided with knowledge of the ROC, the inverse transform of each fraction can be easily determined.
Example
Determine the inverse transform of
with a ROC
X z z
----------- A1
z p1-------------
A2
z p2-------------
A3
z p3-------------
AN
z pN--------------+ + + +
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p1 z p2 z p3 z pN ------------------------------------------------------------------------------------------------------------------= =
A1 A2 A3 AN
A1X z
z----------- z p1
z p1=
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p2 z p3 z pN ------------------------------------------------------------------------------------------------------------------
z p1=
= =
A2
X z
z----------- z p
2
z p2=
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p1 z p3 z pN ------------------------------------------------------------------------------------------------------------------
z p2== =
ANX z
z----------- z pN
z pN=
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p1 z p2 z p3 z pN 1 ------------------------------------------------------------------------------------------------------------------
z pN=
= =
A1 A2 A3 AN
X z A1z
z p1-------------
A2z
z p2-------------
ANz
z pN--------------+ + +
A1
1 p1z1
---------------------- A2
1 p2z1
---------------------- AN
1 pNz1
----------------------+ + += =
Y z 1 z2+
1 0.5z 1+ 1 z 1 0.5z 2+ + ------------------------------------------------------------------------= z 0.707
-
8/9/2019 Z Transform f2014
21/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
21 / 49
Solution
is first re-written as a rational function of (as opposed to )
Notice that the roots of the denominator polynomial are located at:
, and . For later use, we need the magnitude and angle of
, which are:
Knowing that is in the second quadrant of the complex plane (because of the negative real part and a positive
imaginary part), its angle is computed as follows:
The magnitude and angle of are given by:
Y z z z 1
Y z z
3z+
z 0.5+ z2 z 0.5+ + -----------------------------------------------------=
Y z z
---------- z2
1+z 0.5+ z 0.5 j0.5+ z 0.5 j0.5+ + -----------------------------------------------------------------------------------------------
A1
z 0.5+ ---------------------
A2
z 0.5 j0.5+ ------------------------------------
A3
z 0.5 j0.5+ + -------------------------------------+ +
= =
p1 0.5= p2 0.5 j0.5+= p3 0.5 j0.5 conjugate of p2= =
p2
p2 0.52 0.52+ 0.5 0.707= = =
p2
p2 1 atan34
------ 2.3562 radians= = =
A1z
21+
z 0.5 j0.5+ z 0.5 j0.5+ + -------------------------------------------------------------------------
z 0.5=
5= =
A2z
21+
z 0.5+ z 0.5 j0.5+ + ----------------------------------------------------------
z 0.5 j0.5+=
2 j+= =
A2
-
8/9/2019 Z Transform f2014
22/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
22 / 49
Therefore
It now remains to look-up the inverse transform for each term:
where , , and
Therefore
Case of repeated roots
If there is a repeated root, p1, say of order two, then:
A2 2 2 12+ 5 2.236= = =
A2 12--- atan 2.6779 radians= =
A3z
21+
z 0.5+ z 0.5 j0.5+ ----------------------------------------------------------
z 0.5 j0.5=
2 j conjugate of A2= = =
Y z 5
1 0.5 z 1--------------------------------
A2
1 p2z1
---------------------- A2
1 p2z1
-------------------------+ +=
Z1 5z
z 0.5+ ---------------------
5 0.5 nu n =
Z 1 A2z
z p2 ------------------
A3z
z p3 ------------------+
Z 1 A2
1 p2z1
---------------------- A2
1 p2z1
-------------------------+
2A2 p2n n p2 A2+ cos u n = =
A2 2.236= A2 2.68 radians= p2 0.707= p2 2.68 radians=
y n 5 0.5 nu n 2 2.236 0.707 n 2.3562n 2.6779+ cos u n +=
-
8/9/2019 Z Transform f2014
23/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
23 / 49
and to find we proceed as follows:
differentiate the equation above w.r.t z
If we substitute we end up with
Y z z
---------- A1
z p1-------------
A2
z p1 2
--------------------- A3
z p3-------------
AN
z pN--------------+ + + +
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p1 2 z p3 z pN
------------------------------------------------------------------------------------------------------------------= =
A2Y z z
---------- z p1 2
z p1=
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p3 z pN ------------------------------------------------------------------------------------------------------------------
z p1=
= =
A3Y z z
---------- z p3 2
z p3=
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p1 2 z p4 z pN
------------------------------------------------------------------------------------------------------------------
z p3=
= =
ANY z z
---------- z pN 2
z pN=
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p1 2 z p3 z pN 1
------------------------------------------------------------------------------------------------------------------
z pN=
= =
A1
z p1 2Y z
z---------- A1 z p1 A2 z p1 2
A3
z p3-------------
AN
z pN--------------+ ++ +=
d
dz----- z p1
2Y z z
----------
A1 z p1 2d
dz-----
A3
z p3-------------
AN
z pN--------------+ +
2 z p1 A3
z p3-------------
AN
z pN--------------+ +
+ +=
z p1=
A1d
dz----- z p1
2Y z z
----------
z p1=
d
dz-----
b0zN 1 b1z
N 2 b2zN 3 bMz
N M 1+ + + +
z p3 z pN ------------------------------------------------------------------------------------------------------------------
z p1=
= =
-
8/9/2019 Z Transform f2014
24/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
24 / 49
Example1
Determine the inverse transform of with a ROC
Solution
The denominator polynomial has a repeated root (multiplicity 2) at z = 1. Therefore, the partial fraction expansiontakes the form:
where are given by:
1. Examples 3.4.7 and 3.4.10 of the text, Proakis and Manolakis
X z
1
1 z 1+ 1 z 1 2---------------------------------------------
= z 1
X z z3
z 1+ z 1 2----------------------------------- X z
z
----------- z2
z 1+ z 1 2-----------------------------------= =
X z z
----------- A1
z 1-----------
A2
z 1 2------------------
A3
z 1+-----------+ +=
A1 A2 A3
A2 z2z 1+ ----------------
z 1=
12---= =
A3z2
z 1 2------------------
z 1=
14---= =
A1d
dz----- z2
z 1+ ----------------
z 1=
2z z 1+ z2z 1+ 2---------------------------------
z 1=
34---= = =
S Y S C 4 4 0 5 D i i t l S i l P i
-
8/9/2019 Z Transform f2014
25/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
25 / 49
X z z
-----------
34---
z 1-----------
12---
z 1 2------------------
14---
z 1+-----------+ +=
X z 34--- 1
1 z 1---------------- 1
2---
z 1
1 z 1 2----------------------- 1
4--- 1
1 z 1+----------------+ +=
x n 34---u n 1
2---nu n 1
4--- 1 nu n + +=
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z T f f 2 0 1 4 f
-
8/9/2019 Z Transform f2014
26/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
26 / 49
Analysis of LTI Systems
Transfer Functions
The transfer function of a discrete-time LTI system is defined as the ratio , where Y(z) is the transform of the
output sequence y(n), which caused by the input sequence x(n). X(z) is the transform of the input sequence.
Since , it follows that . It therefore follows that, the transfer function is equal to the z-
transform of the impulse response h(n).
The transfer function can also be related directly to the system coefficientsas follows.
Y z X z -----------
Y z H z X z = Y z
X z ----------- H z =
y n aky n k
k 1=
N
bkx n k k 0=
M
+=
Y z akz k
Y z
k 1=
N
bkz kX z
k 0=
M
+=
Y z 1 akz k
k 1=
N
+ X z bkz k
k 0=
M
=
Y z X z ----------- H z
bkz k
k 0=
M
1 akz k
k 1=
N
+-------------------------------- zN M
bkzM k
k 0=
M
zN
akzN k
k 1=
N
+--------------------------------------- zN M
b0zM b1z
M 1 bM+ + +
zN a1zN 1 aN+ + +
---------------------------------------------------------------= = = =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z T r a n s f o r m f 2 0 1 4 f m
-
8/9/2019 Z Transform f2014
27/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
27 / 49
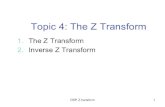
The system has N poles. Thepolesof the system are the roots of the denominator polynomial:
The system has M zeros located at the roots of the numerator polynomial:
In addition, there are M-N (trivial) zeros located at the origin due to the factor
For systems with real coefficients (which is all we have in this course), complex poles occur in conjugate pairs. Also,complex zeros occur in conjugate pairs.
Example
Consider a causal LTI system with a transfer function of the form:
The poles of this system are given by:
The system zeros are given by:
zN
a1zN 1
a2zN 2 aN+ + + + 0=
b0zN
b1zN 1
b2zN 2 bMz
N M+ + + + 0=
zN M
H z z
4z
2+
z4
0.25+
---------------------=
z4
0.25+ 0=
z
4
0.25 0.25ej 1 2k+ 1
2-------e
j1 2k+
4---------------
4
= = =
z1 z2 z3 z4 1
2-------e
j4---
1
2-------e
j34
------1
2-------e
j54
------1
2-------e
j74
------
1
2-------e
j4---
1
2-------e
j34
------1
2-------e
j34
------ 1
2-------e
j4---
= =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z T r a n s f o r m f 2 0 1 4 f m
-
8/9/2019 Z Transform f2014
28/49
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
28 / 49
Stability
Stability of Recursive SystemsThe impulse response h(n) is the inverse transform of the system transfer function. It contains exponential terms of the
formpnwherepis a system pole. Therefore if any of the system poles falls outside the unit circle, h(n) will not beabsolutely summable and hence the system can not be stable. We therefore conclude thatfor a causal, recursive IIRsystem to be stable all of its poles must have magnitudes less than one.
z4
z2
+ z2
z2
1+ z2 z j+ z j 0= = =
z1 z2 z3 z4 0 0 j j =
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imaginar
yPart
2
unit circle
pole
zero
Pole-Zero Diagram
conjugate
pair
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z T r a n s f o r m f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
29/49
g g g _ _
29 / 49
Stability of Non-Recursive FIR Systems
The I/O relationship of a non-recursive system is expressed as
where {bk} are the system coefficients. The unit-sample response of such a system is given by:
The transfer function is given by:
We notice that H(z) has all of its poles (M of them) at the origin ( ). As a result, we conclude that non-recursiveFIR systems are always stable.
Solving Difference Equations using the z-Transform
Unilateral Transform
The unilateral transform of an arbitrary sequence
1
is defined as:
1. Note: by definition, the summation is over the range even if happened to be nonzero for
y n bkx n k
k 0=
M
=
h n bk n k k 0=
M
b0 n b1 n 1 b2 n 2 bM n M + + + += =
H z b0 b1z1 b2z
2 bMz M+ + + +
1
zM------ b0z
M b1zM 1 b2z
M 2 bM+ + + + = =
z 0=
n
0 n n n 0
Fu z f n z n
n 0=
=
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
30/49
30 / 49
The properties we discussed earlier with respect to the bilateral transform also apply to the unilateral transform, withthe exception of the time-shifting property. Therefore, we revisit this one property.
Time Shifting PropertyLet where m is a positive integer. It can be shown that the unilateral transforms of y(n) and f(n) arerelated by:
In the above expression we may identify two parts:
y n f n m =
Yu z f m z0
f m 1+ z 1 f m 2+ z 2 f 1 z m 1+ z m Fu z + + + + +=
-4 -3 -2 -1 n
f(n)
-1 0 1 2 3n
f(n-3)
f n u n Fu z
f n 3 u n 3 z 3 Fu z
f n 3 f 3 f 2 z 1 f 1 z 2 z 3 Fu z + + +
f n m f m z 0 f m 1+ z 1 f m 2+ z 2 f 1 z m 1+ z m Fu z + + + + +
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
31/49
31 / 49
1) a power series part which depends on past values of thesequence corresponding to . This component is clearly dependent on the value of the time shift
2) The second part is the transform of the original (un-shifted) sequence, multiplied by . This part is
identical to what we would have had if we were using the bi-lateral transform.
To solve a difference equation
1) Given a difference equation for an Nth-order system of the form:
where the input sequence x(n) is assumed to be right-sided.
2) Take the uni-lateral transform of both sides of the difference equation
3) Rearrange results
m z 0 f m 1+ z 1 f m 2+ z 2 f 1 z m 1++ + + +m n 1 m
z m Fu z z
m
y n aky n k
k 1=
N
bkx n k k 0=
M
+=
Yu z aky k y k 1+ z1 y 1 z k 1+ z k Yu z + + + +
k 1=
N
bkz kXu z
k 0=
M
+=
Yu z 1 a
kz
k
k 1=
N
+ a
ky k y k 1+ z 1 y 1 z k 1++ + +
k 1=
N
b
kz
kX
u z
k 0=
M
+=
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
32/49
32 / 49
The first term to the right is the transform of the initial condition response. The second term is recognized as theproduct of the system transfer function and the transform of the input. This second term is the transform of the forcedresponse.
4) Find the inverse transform to obtain the total system response in the time domain.
Example
A second order system is described by:
where y(-2), y(-1) = 20.25, -8.5
a) Find the unit-sample response of the system
Yu z
aky k y k 1+ z1
y 1 z k 1++ + +
k 1=
N
1 akz k
k 1=
N
+-------------------------------------------------------------------------------------------------------------------------
bkz k
k 0=
M
1 akz k
k 1=
N
+-------------------------------------Xu z +=
y n 2.5y n 1 y n 2 x n x n 1 +=
H z
bkz k
k 0=
M
1 akz k
k 1=
N
+-------------------------------------
1 z1
1 2.5z 1 z 2+ +--------------------------------------
z2
z
z2 2.5z 1+ +------------------------------= = =
H z z
----------- z 1
z2
2.5z 1+ +------------------------------
z 1z 0.5+ z 2+ --------------------------------------
C1
z 0.5+ ---------------------
C2
z 2+ ----------------+= = =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
33/49
33 / 49
b) Determine the initial-condition response of the system
C1z 1z 2+ ----------------
z 0.5=
1= =
C2z 1
z 0.5+ ---------------------
z 2=
2= =
H z zz 0.5+ --------------------- 2z
z 2+ ----------------+=
h n 0.5 n 2 2 n+ u n =
Yic z a1 y 1 a2 y 2 y 1 z
1+ +
1 a1z1
a2z2
+ +------------------------------------------------------------------------------------=
Yic z
2.5 8.5 1 20.25 8.5 1 z 1+ +
1 2.5z 1 z 2+ +----------------------------------------------------------------------------------------------------------------
1 8.5z1
+
1 2.5z1
z2
+ +-------------------------------------- z
28.5z+
z2
2.5z 1+ +------------------------------=
= =
Yic z
z--------------
z 8.5+
z2
2.5z 1+ +------------------------------
z 8.5+z 0.5+ z 2+ --------------------------------------
C1
z 0.5+ ---------------------
C2
z 2+ ----------------+= = =
C1z 8.5+z 2+ ----------------
z 0.5=
163------= =
C2z 8.5+z 0.5+ ---------------------
z 2=
133------= =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
34/49
34 / 49
,
Other examplesThe following examples relate to a Linear Time Invariant System with a transfer function of the form:
Question 1:Determine the systems impulse response h(n) for using long division.Solution:Using long division as shown above leads to:
Therefore, h(n), for can be expressed as:
Yic z
163------z
z 0.5+ ---------------------
133------z
z 2+ ----------------+=
yic n 163------ 0.5 n 13
3------ 2 n= n 2
H z z 1+z z2 z 0.5+ ----------------------------------=
n 6
H z Z 2 2Z 332---Z 4
12---Z 5
14---Z 6
12---Z 4 1
8---Z 5+
Z3 Z212---Z+
----------------------------------------+ + + +=
n 6
h n n 2 2 n 3 32--- n 4
12--- n 5
14--- n 6 + + +=
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
35/49
35 / 49
Question 2Find the difference equation of the system.
Z 1+
Z 112---Z 1+
212---Z 1
2 2Z1
Z2
+
32---Z 1 Z 2
32---Z 1
32---Z 2
34---Z 3+
12---Z 2
34---Z 3
12---Z 2
12---Z 3
14---Z 4+
14---Z 3
14---Z 4
14---Z 3 1
4---Z 4 1
8---Z 5+
12---Z 4
18---Z 5+
Z 2 2Z 332---Z 4
12---Z 5
14---Z 6+ + +
Z3 Z212---Z+
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
36/49
36 / 49
Solve the difference equation iteratively to find h(n) for .Solution
Therefore, the system difference equation is given by
where
The difference equation of the system is given by:
h(n) is the system output, y(n), subject to the assumptions that , and . Subject to these 2conditions we proceed to solve the system equation iteratively as follows:
n 6
H z z 1+
z z2 z 0.5+ ----------------------------------
z 1+
z3 z212---z+
---------------------------- z 2 z 3+
1 z 112---z 2+
--------------------------------- b2z
2 b3z3+
1 a1z1 a2z
2-----------------------------------------= = = =
y n a1y n 1 a2y n 2 b2x n 2 b3x n 3 + + +=
a1 a2 b2 b3 112--- 1 1
=
y n y n 1 12---
y n 2 x n 2 x n 3 + + +=
x n n = y 2 y 1 0= =
y 0 y 1 12--- y 2 2 3 + + + 0 0 0 0+ + + 0= = =
y 1 y 0 12---
y 1 1 2 + + + 0 0 0 0+ + + 0= = =
y 2 y 1 12---
y 0 0 1 + + + 0 0 1 0+ + + 1= = =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
37/49
37 / 49
Therefore, h(n), for can be expressed as:
which is identical to the result obtained using long division followed by inverse-z transform.
Question 3:
Use partial fraction expansion to find h(n)Solution1
The constants are evaluated as follows:
y 3 y 2 12---
y 1 1 0 + + + 1 0 0 1+ + + 2= = =
y 4 y 3 12--- y 2 2 1 + + + 2 12--- 1 0 0+ + + 32---= = =
y 5 y 4 12---
y 3 3 2 + + +32---
12---
2 0 0+ + +12---= = =
y 6 y 5 12---
y 4 4 3 + + + 12---
12---
32---
0 0+ + + 14---= = =
n 6
h n n 2 2 n 3 32--- n 4
12--- n 5
14--- n 6 + + +=
H z z
----------- z 1+
z2 z1
2-------e
j4---
z1
2-------e
j4---
----------------------------------------------------------------- c1
z2-----
c4
z-----
c2
z1
2-------e
j4---
-------------------------------
c3
z1
2-------e
j4---
----------------------------+ + += =
c1 c2 c3 c4
c1z 1+
z1
2-------e
j4---
z1
2-------e
j4---
------------------------------------------------------------
z 0=
1
1
2-------e
j4---
1
2-------e
j4---
-------------------------------------------------- 112------ 2= = = =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
38/49
38 / 49
After substituting the values of the equation above is simplified to:
Therefore, the constants needed are
Now, H(z) can be re-written as
c2z 1+
z2 z 12
-------ej
4---
---------------------------------
z1
2-------e
j4---
=
11
2-------e
j4---
+
12---e
j2---
1
2-------e
j4--- 1
2-------e
j4---
--------------------------------------------------------------1.5 j
12---
j2--- j22-------- 4---sin
--------------------------------------1.5 j
12---
j2---- j
-------------------- 3 j1+= = = = =
c3z 1+
z2 z 12
-------e j4---
------------------------------------
z1
2-------e
j4---
=
11
2-------e
j4---
+
12---ej
2---
12
-------ej4--- 1
2-------e j
4---
------------------------------------------------------------1.5 j
12---+
j
2--- j2
2------- 4---sin
---------------------------------1.5 j
12---+
j
2--- j
------------------- 3 j1= = = = =
c4
z-----
z 1+
z2 z1
2
-------ej
4---
z1
2
-------ej
4---
----------------------------------------------------------------- c1
z2-----
c2
z1
2
-------ej
4---
-------------------------------
c3
z1
2
-------ej
4---
----------------------------=
c1 c2 c3
c4
z-----
z 1+ 6z3 6z2 2z 1+ +
z2 z1
2-------e
j
4
---
z
1
2-------e
j
4
---
-----------------------------------------------------------------------
6z3
6z2
3z+
z2 z2 z 0.5+ ------------------------------------------
6z---
z2 z 0.5+ z2 z 0.5+ -------------------------------
6z---= = = =
c1 c2 c3 c4 2 3 j1+ 3 j1 6 =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
39/49
39 / 49
The inverse transform is given by:
This result produces the same numerical values obtained using long division, and iterative solutions for the systemsdifference equation.
Solution 2:Let us express H(z) as , and therefore , where
Now let us try to find f(n).
H z 2z--- 6
3 j1+
11
2
-------ej
4---z 1
--------------------------------------- 3 j1
11
2
-------ej
4---z 1
-------------------------------------+ + +=
h n 2 n 1 6 n 3 j1+ 1
2-------
nej
4---n
3 j1 1
2-------
nej
4---n
+ u n + +
6 n 2 n 1 2 Real 3 j1+ 1
2-------
nej
4---n
u n
+ +
6 n 2 n 1 2 10 1
2-------
n n
4------ 1
3---atan+
cos u n + +
= =
=
H z z 1 F z = h n f n 1 =
F z z 1+
z1
2-------e
j4---
z1
2-------e
j4---
------------------------------------------------------------=
F z z
----------- z 1+
z z1
2-------e
j4---
z1
2-------e
j4---
-------------------------------------------------------------- c1
z-----
c2
z1
2-------e
j4---
-------------------------------
c3
z1
2-------e
j4---
----------------------------+ += =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
40/49
40 / 49
Finally we can write h(n) as:
c1z 1+
z1
2
-------ej
4---
z1
2
-------ej
4---
------------------------------------------------------------
z 0=
1
1
2
-------ej
4---
1
2
-------ej
4---
-------------------------------------------------- 112------ 2= = = =
c2z 1+
z z1
2-------e
j4---
-------------------------------
z1
2-------e
j4---
=
11
2-------e
j4---
+
1
2-------e
j4---
1
2-------e
j4--- 1
2-------e
j4---
------------------------------------------------------------------1.5 j
12---
1
2-------e
j4---
j
--------------------------------
1 j3+ 1
2-------e
j4--- 10
2---------- e
j 4--- 3atan+
=
= = = =
c310
2----------e
j 4--- 3atan+
=
n 2 n 2 Real10
2----------e
j 4--- 3atan+
1
2------- n
e
j4---n
u n
+
2 n 2 10 1
2-------
n 1+ n
4------
4--- 3atan+ +cos u n +
= =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
41/49
41 / 49
Since , the equation above can be rewritten as:
Solution 3
Let us express H(z) as , and therefore , where
Now let us try to find f(n).
h n f n 1 2 n 1 2 101
2-------
n n
4------
4---
4--- 3atan+ + +cos u n 1 += =
3atan
2--- 1
3---atan=
h n 2 n 1 2 10 1
2-------
n n
4------ 1
3---atan+cos u n 1 +=
H z z 2 F z = h n f n 2 =
F z z 1+ z
z1
2-------e
j4---
z1
2-------e
j4---
------------------------------------------------------------=
F z z
----------- z 1+
z1
2-------e
j4---
z1
2-------e
j4---
------------------------------------------------------------ c2
z1
2-------e
j4---
------------------------------- c3
z1
2-------e
j4---
----------------------------+= =
c2 z 1+
z1
2-------e
j4---
----------------------------
z1
2-------e
j4---
=
11
2
-------ej
4---
+
1
2-------e
j4--- 1
2-------e
j4---
-------------------------------------------
1.5 j1
2
---
j2
2-------
4---sin
------------------------ 1 j3+2-------------- 102----------ej 3atan= = = = =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
42/49
42 / 49
Finally we can write h(n) as:
Since , the equation above can be rewritten as:
Question4
Use a combination of inverse transforms and time-domain convolution to find h(n)
Solution
H(z) can be rewritten as
c3102
----------e j 3atan=
n 2 Real 102
----------ej 3atan1
2-------
nej
4---n
u n
2 10 1
2-------
n 2+ n4
------ 3atan+cos u n = =
h n f n 2 2 101
2
-------
n n
4
------
2
--- 3atan+ +cos u n 2 = =
3atan
2--- 1
3---atan=
h n 2 10 1
2-------
n n4
------ 13---atan+cos u n 2 =
H z z 1+z z2 z 0.5+ ----------------------------------=
H z z 1+
z z1
2-------e
j4---
z1
2-------e
j4---
-------------------------------------------------------------- z 2 z 3+ 1
11
2-------e
j4---z 1
---------------------------------- 1
11
2-------e
j4---z 1
-------------------------------= =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
43/49
43 / 49
h2 n Z1 1
1 12
-------e j4--- z 1
----------------------------------
1
2
------- n e
jn4
------ u n = =
h3 n Z1 1
11
2
-------ej
4---z 1
-------------------------------
1
2-------
n ej
n4
------ u n = =
h4 n h2 n h3 n 1
2-------
m e
jm4
------- 1
2-------
n m e
j n m
4---------------------
m 0=
n
1
2-------
n ej
n4
------ e
jm2
-------
m 0=
n
1
2-------
n ej
n4
------ 1 e
j n 1+
2--------------------
1 ej2---
-------------------------------
1
2-------
n ej
n4
------ ej
n 1+ 4
--------------------
ej
4---
---------------------- ej
n 1+ 4
--------------------e
j n 1+
4--------------------
ej
4---
ej
4---
------------------------------------------------- 1
2-------
n n 1+
4--------------------sin
4---sin
----------------------------- 2 1
2-------
n n 1+ 4
--------------------sin
= = =
= =
= =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
44/49
44 / 49
The result above is valid for . In other words, h(n) is given by:
Question 5
An LTI system has an impulse response h(n) of the form:
Is this system stable?Solution:
h n h4 n 2 h3 n 3 + 21
2-------
n 2 n 1 4
--------------------sin 21
2-------
n 3 n 2 4
--------------------sin+
2
1
2-------
n
2 n 1
4--------------------sin 2 2
n 2 4--------------------sin+ 2
1
2-------
n
2
n4------sin 2
n4------cos 2 2
n4------cos
21
2-------
n 2 n4
------sin 3 2 n
4------cos 2
1
2-------
n n4
------sin 3 n
4------cos
2 101
2-------
n 1
10---------- n
4------sin
3
10---------- n
4------cos 2 10 1
2-------
n n4
------sinsin n4
------coscos
2 101
2
------- n n
4------ +
cos 2 10 1
2
------- n n
4------ 1
3---atan+
cos
= = =
= =
= =
= =
=
n 2
h n 2 10 1
2-------
n n4
------ 13---atan+
cos u n 2 =
h n 2 101
2-------
n n4
------ 13---atan+
cos u n 2 =
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
45/49
45 / 49
Therefore, is finite, and the system is stable.
Example
Consider the discrete-time system shown above.
a) what is the difference equation of this system?
h n
n 0=
2 101
2-------
n n4
------ 13---atan+
cos u n 2
n 0=
2 101
2-------
n n
4------ 1
3---atan+
cos
n 2=
2 101
2-------
n n4
------ 13---atan+
cos
n 2=
2 101
2
-------
n
n 2=
2 10
1
1 12
-------
---------------- 11
2
-------
= =
=
h n
n 0=
z 1
z 1
x n y n
2
3
0.9
w n
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
b) U l di i i t d t i th fi t i l f th i l f th t
-
8/9/2019 Z Transform f2014
46/49
46 / 49
b) Use long division to determine the first six values of the impulse response of the system.c) Determine an analytical expression for the impulse response of the system.d) Determine the unit step response of the system
e) give a pole-zero diagram for the system. Is it stable?part a)
The transfer function of the system is
Therefore, the difference equation is
part b)...see next page
the first six samples are {1, 2.9, 5.61,5.049,4.5441,4.08969}
H z W z X z ------------
Y z W z ------------ 1
1 0.9z 1------------------------ 1 2z 1 3z 2+ + = =
y n 0.9y n 1 x n 2x n 1 3x n 2 + + +=
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
47/49
47 / 49
1 2z 1 3z 2+ +
1 0.9z 1
2.9z 1 3z 2+
2.9z 1 2.61z 2
5.61z 2
5.61z 2 5.049z 3
5.049z 3
5.049z 3 4.5441z 4
4.5441z 4
4.5441z 4 4.08969z 5
4.08969z 5
1 2.9z 1
5.61z 2
5.049z 3
4.5441z 4
4.8969z 5
+ + + + +
1 0.9z 1
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
part c)
-
8/9/2019 Z Transform f2014
48/49
48 / 49
part c)
part d)
the unit step response may be evaluated as follows
notice that the RHS above is made of three terms which are identical except for a time delay. Therefore, the inversetransform, which is required to find y(n) can easily be evaluated as:
part e)
This system has two zeros at and one poles at and . The poles are inside the unit circle in the z-plane, which implies that the system is stable. The pole-zero diagram follows:
h n Z 1 H z Z 1 1
1 0.9z 1
------------------------ 2z 1
1 0.9z 1
------------------------ 3z 2
1 0.9z 1
------------------------+ +
0.9 nu n 2 0.9 n 1 u n 1 3 0.9 n 2 u n 2 + +
n 2.9 n 1 0.92 1.8 3+ + 0.9 n 2 u n 2 + + n 2.9 n 1 5.61 0.9 n 2 u n 2 + +
= = =
=
=
Y z H z X z 11 0.9z 1------------------------ 2z
1
1 0.9z 1------------------------ 3z
2
1 0.9z 1------------------------+ +
11 z 1----------------= =
n Z 1 11 0.9z 1------------------------ 1
1 z 1----------------
Z 19
1 0.9z 1------------------------ 10
1 z 1----------------+
9 0.9 nu n 10u n += = =
y n f n 2f n 1 3f n 2 + + 9 0.9 nu n 10u n
2 9 0.9 n 1
u n 1
10u n 1
+
3 9 0.9 n 2
u n 2
10u n 2
+
+ +
+
= =
1 j 2 z 0.9= z 0=
S Y S C 4 4 0 5 D i g i t a l S i g n a l P r o c e s s i n g Z _ T r a n s f o r m _ f 2 0 1 4 . f m
-
8/9/2019 Z Transform f2014
49/49
49 / 49
-1.5 -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
1.5
Real Part
Imaginary
Part


![6.003 Lecture 6: Z Transform · Z Transform Z transform is discrete-time analog of Laplace transform. Z transform maps a function of discrete time n to a function of z. X(z)= x[n]z](https://static.fdocuments.us/doc/165x107/5e6f94456e2ffa7b6442a280/6003-lecture-6-z-transform-z-transform-z-transform-is-discrete-time-analog-of.jpg)