Z Transform
5
Click here to load reader
-
Upload
buddha-blessed -
Category
Documents
-
view
212 -
download
0
description
Math
Transcript of Z Transform

Connexions module: m10549 1
The Z Transform: DefinitionVersion 2.9: Jun 1, 2005 9:10 pm GMT-5
Benjamin Fite
This work is produced by The Connexions Project and licensed under theCreative Commons Attribution License ∗
AbstractA brief de�nition of the z-transform, explaining its relationship with the Fourier
transform and its region of convergence, ROC.
The Z Transform: De�nition
1 Basic De�nition of the Z-Transform
The z-transform of a sequence is de�ned as
X (z) =∞∑
n=−∞
(x [n] z−n
)(1)
Sometimes this equation is referred to as the bilateral z-transform. At times the z-transform is de�ned as
X (z) =∞∑
n=0
(x [n] z−n
)(2)
which is known as the unilateral z-transform.There is a close relationship between the z-transform and the Fourier transform of a
discrete time signal, which is de�ned as
X(eiω
)=
∞∑n=−∞
(x [n] e−(iωn)
)(3)
Notice that that when the z−n is replaced with e−(iωn) the z-transform reduces to the FourierTransform. When the Fourier Transform exists, z = eiω , which is to have the magnitudeof z equal to unity.
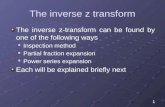
2 The Complex Plane
In order to get further insight into the relationship between the Fourier Transform and theZ-Transform it is useful to look at the complex plane or z-plane. Take a look at the complexplane:
The Z-plane is a complex plane with an imaginary and real axis referring to the complex-valued variable z. The position on the complex plane is given by reiω , and the angle from
∗http://creativecommons.org/licenses/by/1.0
http://cnx.org/content/m10549/latest/

Connexions module: m10549 2
Z-Plane
Figure 1
the positive, real axis around the plane is denoted by ω. X (z) is de�ned everywhere on thisplane. X
(eiω
)on the other hand is de�ned only where |z| = 1, which is referred to as the
unit circle. So for example, ω = 1 at z = 1 and ω = π at z = −1. This is useful because, byrepresenting the Fourier transform as the z-transform on the unit circle, the periodicity ofFourier transform is easily seen.
3 Region of Convergence
The region of convergence, known as the ROC, is important to understand because itde�nes the region where the z-transform exists. The ROC for a given x [n] , is de�ned as therange of z for which the z-transform converges. Since the z-transform is a power series, itconverges when x [n] z−n is absolutely summable. Stated di�erently,
∞∑n=−∞
(|x [n] z−n|
)< ∞ (4)
must be satis�ed for convergence. This is best illustrated by looking at the di�erent ROC'sof the z-transforms of αnu [n] and αnu [n− 1].
Example 1:
Forx [n] = αnu [n] (5)
http://cnx.org/content/m10549/latest/

Connexions module: m10549 3
Figure 2: x [n] = αnu [n] where α = 0.5.
X (z) =∑∞
n=−∞ (x [n] z−n)=
∑∞n=−∞ (αnu [n] z−n)
=∑∞
n=0 (αnz−n)=
∑∞n=0
((αz−1
)n) (6)
This sequence is an example of a right-sided exponential sequence because it isnonzero for n ≥ 0. It only converges when |αz−1| < 1. When it converges,
X (z) = 11−αz−1
= zz−α
(7)
If |αz−1| ≥ 1, then the series,∑∞
n=0
((αz−1
)n)does not converge. Thus the ROC
is the range of values where|αz−1| < 1 (8)
or, equivalently,|z| > |α| (9)
Example 2:
Forx [n] = (− (αn))u [−n− 1] (10)
http://cnx.org/content/m10549/latest/

Connexions module: m10549 4
Figure 3: ROC for x [n] = αnu [n] where α = 0.5
Figure 4: x [n] = (− (αn)) u [−n− 1] where α = 0.5.
http://cnx.org/content/m10549/latest/

Connexions module: m10549 5
Figure 5: ROC for x [n] = (− (αn)) u [−n− 1]
X (z) =∑∞
n=−∞ (x [n] z−n)=
∑∞n=−∞ ((− (αn))u [−n− 1] z−n)
= −(∑−1
n=−∞ (αnz−n))
= −(∑−1
n=−∞
((α−1z
)−n))
= −(∑∞
n=1
((α−1z
)n))= 1−
∑∞n=0
((α−1z
)n)(11)
The ROC in this case is the range of values where
|α−1z| < 1 (12)
or, equivalently,|z| < |α| (13)
If the ROC is satis�ed, then
X (z) = 1− 11−α−1z
= zz−α
(14)
http://cnx.org/content/m10549/latest/

![6.003 Lecture 6: Z Transform · Z Transform Z transform is discrete-time analog of Laplace transform. Z transform maps a function of discrete time n to a function of z. X(z)= x[n]z](https://static.fdocuments.us/doc/165x107/5e6f94456e2ffa7b6442a280/6003-lecture-6-z-transform-z-transform-z-transform-is-discrete-time-analog-of.jpg)