Automated Web Patrol with Strider HoneyMonkey Finding Web Sites ...
Upload
daan-bossinkCategory
view
215download
0description

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 1/12
578 IEEE TRANSACTIONS ON ROBOTICS, VOL. 23, NO. 3, JUNE 2007
Surface-Tension-Driven Biologically Inspired WaterStrider Robots: Theory and Experiments
Yun Seong Song , Student Member, IEEE , and Metin Sitti , Member, IEEE
Abstract—Recent biological studies on water strider insects re-vealed how they maintain stability and maneuver on the surfaceof water. While macroscale bodies use buoyancy, these very smallinsects use surface tension force to balance their weight on water.This paper proposes a biologically inspired miniature robot thatutilizes the unique scaling advantage of these insects. The paperfocuses on understanding the physics of the interaction betweenthe insect and the surface of water and on designing a robot thatmimics their key features. Hydrophobic Teflon coated wire legs op-timized to take the most advantage of the surface tension force areused to support the weight of the 1-g robot. It is shown that twelveof these legs can support up to 9.3 g of payload. A T-shape actu-ation mechanism with three piezoelectric unimorph actuators is
designed and studied to enable controlled locomotion. Static anddynamic properties of the robot are analyzed and compared withthe experimental results. The tethered robot can successfully makeboth linear and rotational motions. Maximum forward speed ismeasured to be 3 cm/s, and the rotational speed is 0.5 rad/s. Thisrobot proposes a new way of locomotion on water surface for fu-ture robots and devices.
Index Terms—Biomimetic robotics, miniature robotics, piezo-electric actuator, surface tension.
I. INTRODUCTION
ADAPTING working principles of highly efficient, multi
functional and suboptimal biological systems to synthetictechnologies is one of the current challenges of engineering de-
sign. Biologically inspired systems and robots can enable us to
understand nature in depth, and to provide alternative ideas of
developing smart and advanced novel robotic mechanisms as
can be seen from the wall climbing gecko inspired robots [1]–[3]
and the underwater swimming robots [4]-[7]. Insects have in-
spired researchers with their especially high mobility. For ex-
ample, cockroach’s movements have been adapted to hexapedal
robots [8]–[10], and the wing movement of the flies have been
studied for micromechanical flying robots [11].
Recently, the unique characteristics of the water strider has
been studied [12], [13]. This tiny insect, weighing only 0.01 g,
Manuscript received June 5, 2006; revised October 29, 2006. This paper wasrecommended for publication by Associate Editor B. Nelson and Editor F. Park upon evaluation of the reviewers’ comments. This paper was presented in partat the IEEE International Conference on Robotics and Automation, 2006, andin part at the Robotics Science and Systems Conference, Boston, MA, 2005.
Y. S. Song was with the Nanorobotics Laboratory, Carnegie Mellon Univer-sity, Pittsburgh, PA 15213 USA. He is now with the Department of MechanicalEngineering, Massachusetts Institute of Technology, Cambridge, MA 02139USA.
M. Sitti is with the NanoRobotics Laboratory, Department of MechanicalEngineering, Carnegie Mellon University, Pittsburgh, PA 15213 USA (e-mail:[email protected]).
Color versionsof Figs.1–9 and 11–15 are available online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TRO.2007.895075
can move on top of the surface of water at the speed of 1.5 m/s
without breaking the surface. This insect maintains itself on
the surface of water mainly utilizing the surface tension force.
While the conventional macroscale locomotives rely on buoy-
ancy force to stay above water, this insect takes advantage of
the scaling effect of the length-based surface tension force (
, where is the length scaling factor), which dominates the
volume-based buoyancy force .
These features suggest a new mechanism that will enable
miniature robots to walk on water. Hu et al. [12] proposed a
robot similar to the insect that uses elastic energy storage to
move its legs for a forward motion for a short time. This paperproposes a new microrobot capable of walking on water in-
spired by a water strider that is reprogrammable and control-
lable. Similar to the biological system, this robot is miniature,
highly maneuverable, and demonstrates surface tension domi-
nated locomotion on water. To understand the detailed mecha-
nism of water strider locomotion and agility on water surface,
the static and dynamic interaction between the water strider leg
and the surface of water is analyzed.
This new robot has a few notable advantages compared to the
conventional designs that rely on buoyancy force to stay afloat.
First, the drag force on the surface of water is much smaller than
that the body submerged in the water experiences, thus makingthis robot more power efficient. Second, this robot can be highly
maneuverable since it is very light. Other advantages such as
maneuverability on a very shallow (less than 5 mm deep) water
surface, being very silent, or less disturbing of the water under-
neath the robot can also be noted.
The paper first introduces the design challenges in realizing
the robot in Section II. In Section III, a detailed model for the
supporting leg and the surface of water interaction is estab-
lished, followed by experiments to verify the model. A minia-
ture motion mechanism integrated with piezoelectric unimorph
actuators designed to produce effective propulsion is studied in
Section IV. Using these two key results, the robot is fabricated
as described in Section V, and the experimental results are dis-
cussed in Section VI.
II. DESIGN ISSUES
There are two major features of the insect water strider that
are of interest in designing the robot. One is its ability to take
advantageof the surface tension force to stay on water. Theother
is the sculling motion of the middle legs that results in effective
locomotion on water. The robot, at the final stage, is expected
to achieve similar functionality.
Fig. 1 shows the conceptual CAD model of the water strider
robot [14]. A, B, C, and D are the supporting legs. According to
1042-296X/$25.00 © 2007 IEEE

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 2/12
SONG AND SITTI: SURFACE-TENSION-DRIVEN BIOLOGICALLY INSPIRED WATER STRIDER ROBOTS 579
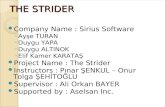
Fig. 1. (a) Photo of an insect water strider. (b) Conceptual CAD model of thewater strider robot. A, B, C, and D: the supporting legs; E and F: the actuatinglegs; G: the body with on-board electronics and power source; H: the middleactuator; I and J: the right and left actuators, respectively [14].
TABLE ICOMPARISON BETWEEN POSSIBLE ACTUATORS
the final weight of the robot, the number of the supporting legsmay vary. E and F are the actuating legs, that are attached to the
actuation mechanism (H, I, and J). G is the body of the robot,
where ultimately on-board electronics can be put.
In choosing the right actuator and the actuation mechanism
(H, I, and J in Fig. 1), the most critical issue to consider is the
weight of the mechanism. Ideally the actuator should be light,
compact, fast, have large displacement and output force, and
have low power consumption. These aspects are compared for
different candidates of actuators [5]–[7], as shown in Table I.
Here, the final selection for the actuator for the water strider
robot is the piezoelectric actuator. To compensate for its small
motion, the actuation mechanism must be able to amplify the
motion. The conventional dc motors could also be consideredprovided that their weight can be properly supported. Since the
Fig. 2. 2-D modelof the problemwithdepth
into
direction. The parametersare defined in Table II.
TABLE IIDEFINITION OF PHYSICAL PARAMETERS (FIG. 2 )
piezoelectric actuator has only one degree of freedom, multipleactuators must be used to create the desired sculling motion of
the actuating leg. The design of the actuation mechanism to pro-
duce such motion is discussed in later sections.
III. SUPPORTING LEG MODELING
It is important to know how much weight the robot can carry,
and if this information can be predicted given the design pa-
rameters of the supporting legs, more rigorous planning of the
robot fabrication can be performed. In this section, a numerical
model of the surface of water near a partially submerged rigid
cylinder is proposed. From this, another numerical model re-
garding a long flexible supporting leg is developed.A long and thin rigid cylinder that represents the supporting
leg of the water strider, made of a material with contact angle
with water, is partially submerged on water as shown in Fig. 2.
The axis of symmetry of the cylinder is horizontal to the undis-
turbed surface of the water. Assuming there are no complex
water surface behaviors at the two ends of the cylinder, the
problem can be taken as a 2-D problem with a depth of , which
is the length of the cylinder (Fig. 2). Parameters in Fig. 2 are
defined in Table II. The area in Fig. 2 is proportional to the
buoyancy force acting on the cylinder, and the area is propor-
tional to the vertical component of the surface tension force [15].
The shape of the air–water interface can be calculated using
the Young–Laplace equation. Then, by integrating this interfaceprofile along the axis, the total lift force can be calculated.

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 3/12
580 IEEE TRANSACTIONS ON ROBOTICS, VOL. 23, NO. 3, JUNE 2007
Fig. 3. Half of the water–air interface profile for various
and
.
Governing Equation: Applying Young–Laplace equation to
this specific case of a long rigid cylinder, we get
(1)
where isthe coef ficient ofsurfacetension(0.072 N/m), is
the surface profile of the water–air interface as shown in Fig. 2,
is the density of water, and is the gravitational constant. That
is, equation is the description of the water–air inter-
face profile. The boundary conditions depend on , which then
depends on . To solve this, it is first assumed that the value of
to be given, and then (1) is solved. The increasing value of
implies that the cylinder is pushed deeper toward the direc-tion, given a specific value of . The exact relation between
and the depth of the cylinder is irrelevant to this problem and is
not dealt with.
Surface-Breaking Condition: It is important to know when
the surface of water breaks, because this occurs when the
cylinder is experiencing the maximum lift force. For the
cases, the cylinder is completely wet when
and the surface of water must break at this point. For the case
of , the surface of water stands vertical (parallel to
the - axis) when . This means that the surface
tension force can no longer support additional weight and must
yield to it, thus breaking the surface of water. This specific
value of is defined , and
if
if (2)
The analysis in the following sections are based on the assump-
tion that is the condition for water surface breaking.
A. Rigid Leg Modeling
Numerical Solution: Assuming the supporting leg to be very
rigid and stiff, the exact solution to (1) is solved numerically.
Fig. 3 shows the surface profile for various when .
When , the interface profile looks almost identical re-
gardless of the value of . This result implies that the maximumlift force will be almost the same if , since most of the
TABLE III
EFFECT OF THE SPACING BETWEEN TWO SUPPORTING LEGS
lift force come from the surface tension force. A similar discus-
sion can be found in [16]. For the case of , the lower the
contact angle is (or the more hydrophilic the leg material is), the
lower the maximum lift force is. For a 2-cm-long cylinder with
, the maximum lift force is calculated to be 2.6 mN.
The numerical solution verified the results of [15] that the
weight of the water that would fill the volume in Fig. 2 would
equal the vertical component of the surface tension force, .
The value of is very close to the value of
. Specifically, when and
, the value of almost exactly equals the
surface tension coef ficient of 72 mN/m.
Surface tension force based lift forces of two neighboring legs
could hinder each other if they are located too close to each
other since their deformed water profiles , w hich c ould b e
calculated by solving (1), would start to overlap after a specific
distance. For a given leg material and spacing between the legs,
the amount of the conserved lift force is calculated as shown in
Table III by solving (1). These results are assuming only two
legs in parallel. If there are more than two legs in parallel, the
percentage of the lift force conserved drops down due to more
than two water dimples overlapping with one another. A more
rigorous study on multiple floating objects and the effect of theirproximity can be found in [17].
The results in this section start from assuming a perfectly
rigid cylinder with no considerations of interface profile at the
two ends of the cylinder. In reality, there exists some end-ef-
fects that may or may not be important. Since the legs of the
robot are long and thin, these effects are neglected in this simu-
lation. However, the sharp edges at the ends of the cylinder may
break the surface of water even before the condition
is satisfied. In the actual experiment, the ends of the cylinder are
bent upwards so that the geometry of the leg at the ends is round
enough.
Experiments: Fig. 4 shows the numerically solved andmaximum lift force relation, for the geometry of specimen
shown in the inset. The angled ends of the specimen are taken
into account in the model in such a way that they are made
of cylinders of length with different depths of their center
into the water. Experiments are performed using three different
leg materials; stainless steel wire, Teflon coated wire (A-M
Systems) and Fluorothane™ MP (Cytronics) coated wire. The
stainless steel wire and the Teflon coated wire had the same
radius of 0.16 mm, but the Fluorothane™ MP coated wire
is expected to have a larger radius because of the manually
performed coating. The leg specimens as described in Fig. 4
inset are attached to a load cell and are slowly lowered down on
to the surface of water at 0.1 mm/s. Table IV shows the exper-imental result for the three specimens. The numerical solution

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 4/12
SONG AND SITTI: SURFACE-TENSION-DRIVEN BIOLOGICALLY INSPIRED WATER STRIDER ROBOTS 581
Fig. 4. Numerically estimated maximum lift forces for different contact angleof the leg materials for the geometry of the specimen given in the inset.
TABLE IVEXPERIMENTAL DATA O F 0.33-mm-DIAMETER LEGS
captures the general trend of the experimental data reasonably
well, but has 10%–15% errors for the cases. This
may be due to the fact that the numerical solution assumes aperfectly static case, whereas the experiments are performed
at a nonzero speed. Also, the model assumes a perfectly rigid
cylinder, whereas the actual specimen is not rigid. Also, the
angled ends of the specimen might have forced the surface of
water to break before .
The numerical solution, along with the experimental results,
suggests that the maximum possible lift force does not differ
much if the leg materials are hydrophobic. That is, any material
hydrophobic enough, i.e., , can make an effective
supporting leg.
B. Compliant Leg Modeling
From the analysis in the previous section, the theoretical
amount of lift force for a rigid cylinder body can now be
numerically solved. But the supporting leg of the robot is long
and thin, and therefore far from being rigid. Fig. 5(a) shows
a schematic of a compliant supporting leg pushing down the
surface of water, where the leg is gradually deflected upward
away from the base toward the tip. Since the amount of lift
force per unit length is a function of the depth of the cylinder,
the tip of the supporting leg experiences less lift force per unit
length compared to the part of the leg that is closer to the base.
To find more realistic value of total lift force, this difference in
lift forces along the length must be taken into account.
Numerical Solution: To find the exact deformed shape of thecompliant supporting leg, the leg is divided into equal-length
Fig. 5. (a) Compliant supporting leg divided into
segments.
if
. (b) Parameters used for determining the flexibility matrix,
, where theonly force applied is the unit-magnitude force at the
th point. (c) Numerically
calculated profile of the compliant supporting leg made of Teflon coated stain-less wire, when
0
mm. The
axis is magnified.
segments along the length, as shown in Fig. 5(a). Each seg-
ment experience some lift forces, which are assumed to be point
forces acting at the center of the segments [ ’s in Fig. 5(a)].
Each segment is assumed to be rigid enough so that it can be
assumed as a cylinder whose axis of symmetry is parallel to theundisturbed surface of the water ( surface).
The depth of the position where the load is applied to deter-
mines the magnitude of the point load. Given the radius and
the contact angle of the segments, the exact theoretical rela-
tion between the lift force per unit length of the cylinder and the
depth of the center of the cylinder can be known from the results
of the previous section. That is, when calculating the magni-
tude of the lift force given , the depth of the center of the rigid
cylinder is also calculated, and many data points describing the
depth versus the lift force relation can be obtained. These data
points are used to fit a curve that captures this relation. For
example, for Teflon coated wire with the radius of 165 m and
the contact angle of 112 , the lift force per millimeter can be
approximated as
(3)
where is the depth of the center of the cylinder in meters, and
is in newtons. The coordinate system is shown in Fig. 5(a),
which is consistent with Fig. 2.
Let the fixed value be the depth of the base of the sup-
porting leg, and set an alternative coordinate system at the
base of the supporting leg Fig. 5(a). The alternative coordinate
system is a translation of the original coordinate system by indirection. Define a vector ,

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 5/12
582 IEEE TRANSACTIONS ON ROBOTICS, VOL. 23, NO. 3, JUNE 2007
where is the depth of the point where is applied to, in
coordinate system. Then describes the depth profile of the
supporting leg. Let the vector
represent the point forces that the segments experience (where
is the total length of the leg in millimeters). Then the problem
of solving for can be formulated as
(4)
where
if
if (5)
where is the elastic modulus of the leg material, is the
moment of inertia of the cross section about the -axis, is
the length of the supporting leg, is the distance between the
base of the supporting leg and the point where (where
) is applied to, and (where
) is the distance between the base of the supporting leg and the
point where would be applied to (but is not actually applied,
Fig. 5(b)). Physically, is the flexibility ma-
trix of the leg, whose -th row describes the depth profile of the
leg (in coordinate) when a unit force is applied only to the
position where would be applied.
Equation (5) is derived assuming small deflection of the leg.
This is a feasible assumption since the length of the leg, which is
greater than 4 cm, is more than ten times bigger than the possible
maximum depth of the base of the leg, which is approximately
3.8 mm for Teflon coated wires (Fig. 3).
Fig. 5(c) shows the bent supporting leg profile derived from
solving (4). The leg material is stainless steel coated with Teflonand the initial depth of the base is 3.85 mm, which is the max-
imum depth possible for Teflon coated leg as estimated in the
previous section. When the length of the leg is 60 mm, the max-
imum lift force is calculated to be 6.88 mN, or 0.70 g. Same
calculation process is applied for plain stainless steel legs of
same dimensions, and the maximum lift force is estimated to
be 6.43 mN, which is not much of a loss in the loading ca-
pacity. Even though plain stainless steel has smaller contact
angle and is considered hydrophilic, the moment of inertia is far
greater than that of the Teflon coated stainless steel wire of the
same diameter, making the leg stiffer to increase the maximum
payload. For four 4-cm-long Teflon coated supporting legs, themaximum payload is expected to be 2.32 g according to this
model, which is about 5% less than the model assuming per-
fectly rigid cylinder.
Fig. 6 shows the numerically calculated payloads (lift force
minus the weight of the leg) for various lengths of the supporting
legs with the radius of 165 m unless otherwise specified. The
maximum lift force for the compliant legs are capped at around
6.9 mN. When the lengths of the legs are less than 4 cm, no
significant difference is present between the rigid leg and the
compliant leg. However, when the length of the leg is greater
than 5 cm, the difference increases and the maximum lift force
for the compliant leg saturates. This result suggests that the sup-
porting legs should be no longer than 5 cm in order for them tobe most effective. If the radius of the legs becomes 0.2 mm or
Fig. 6. Numerically calculated payloads for legs with different geometry andmaterials.
larger, the supporting legs become stiffer and they can support
more weight even when they are longer than 5 cm. The weight
added due to the greater radius is proved to be insignificant.
Experiments: From [14], the maximum lift force for the
robot with four 4-cm-long supporting legs is 1.82 g, which is
around 78% of the numerical estimation of 2.32 g. Another ex-
periment with a sixteen-legged prototype robot with 4-cm-long
Teflon coated legs showed the maximum lift force of 6.31 g, or
61.8 mN. This is 67% of the estimation of 92.8 mN if the leg
spacing is not taken into account. If the narrow spacing between
the legs (4 mm) are considered and simulated, the estimation is
lowered to 7.27 g. The experimental value is showing 86.8% of the estimation in this case.
C. Optimized Leg Shapes
Fig. 6 suggests that the compliant legs lose loading capacity
at longer lengths. This is because when the leg is pushed down
onto the surface of water, it is bent upwards due to the compli-
ance. It is observed that when a 7-cm-long leg is fully loaded,
the end tip of the leg is outside of water. If the legs could be
initially bent downwards to overcome for this upward bending
which decreases the payload, then compliant legs can be longer
and still be effective.
Profile Calculation: The best possible scenario is to havea compliant leg that straightens up at the maximum loading.
Fig. 7(a) shows the bent profile of a compliant leg (7-cm-long)
when each of the segments (as described in previous sec-
tions) are experiencing direction forces of 1.5 mN/cm (or
0.15 g/cm), which is the maximum possible lift force calculated
for Teflon coated legs. A leg with this profile is expected to
straighten up when pushed down onto the surface of water, just
before breaking it.
Experiment: When a synthetic supporting leg with the op-
timized shape is pushed down to the limit onto the surface of
water, the leg straightens up with the uniform depth as intended,
as shown in Fig. 7(b). Prototype robots are built using four and
twelve of these legs to test the loading capacity. The prototypewith four legs is able to carry 3.7 g including the body weight,

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 6/12
SONG AND SITTI: SURFACE-TENSION-DRIVEN BIOLOGICALLY INSPIRED WATER STRIDER ROBOTS 583
Fig. 7. Photo of an optimized shape of a 7-cm-long Teflon coated leg as calcu-lated fromthe numericalmodel (upper image), and photo of this legstraightenedup just before breaking the surface of water (lower image).
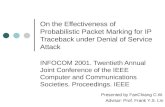
Fig. 8. Photo of the prototype robot with twelve 7-cm-long Teflon coated legswith optimized shapes, carrying 8.3-g payload (total of 9.3-g lift force).
which is 86% of the theoretical maximum of 4.3 g. A 7-cm-long
compliant leg without any initial bending can support less than
7 mN (or 0.7 g) from Fig. 6, this optimizing of the leg shape im-
proves the maximum payload by 32%. (Theoretically, it would
be 53.6% improvement.) The prototype with twelve legs (Fig. 8)
withheld 9.3 g, which is only 71% of the expectation, but still
significantly better than the expected performance of the legs
without initial bending (which is 8.4 g). It is therefore concluded
that longer legs can be used and still be effective if their shapesare optimized to maximize performance. When these optimized
legs are loaded far less than the maximum possible payload,
only the ends of the supporting legs touch the surface of water,
just like the insect water strider.
The difference between the numerical estimation and experi-
mental result may be explained in a few ways. Firstly, there are
fabrication errors; all the supporting legs must be identical to
one another so that they all touch the water at the same time
and break the surface of water at the same time. If the legs are
not consistent, one of the legs would break the surface before
others take their possible maximum lift force, reducing the pos-
sible overall maximum lift force. The more legs the robot has,
the more this is likely to happen, as is seen in the four and twelveleg cases. Another possibility is the inherent inaccuracy in the
model. This analysis does not include the effect of the tips or
bases of the supporting legs. These sources of errors are com-
bined to produce the difference of 15%–30% between the model
and the experiment.
D. Design Summary
From the numerical analyses in this section, a specific designrules for the supporting leg of the water strider robot can be
summarized as follows.
1) Maximum lift force is almost linearly proportional to the
length of the legs, as long as they are shorter than 4 cm for
stainless steel or Teflon coated stainless steel wire with the
radius of 165 m. To use legs longer than 5 cm, optimizing
their profile is necessary. In both cases, one can expect
0.15 g of payload per centimeter for the Teflon coated legs
(Fig. 6).
2) Number of supporting legs are directly proportional to the
maximum lift force, as long as the legs are not so close
to one other and are shaped evenly. The minimum dis-
tance between the neighboring supporting legs coated withTeflon must be at least 12.6 mm apart to conserve 95% of
the lift force (Table III).
3) Leg material having much greater than 90 is desired,
but when , the advantage diminishes (Fig. 4).
4) The end tip of the supporting legs should be bent upwards
so to prevent any singularity of geometry, which may cause
early breaking of the surface of water.
5) The radius of the supporting leg is insignificant to the mag-
nitude of the surface tension force. However, the smaller
radius of the leg is better for a surface tension dominated
support and to minimize overall weight of the robot.
Throughout the analysis, the numerically calculated max-imum lift forces are greater than the experimental results by
15%–30%. Considering the possible errors in the model and
the experiments, these differences are expected. Therefore, it
can be concluded that the numerical models capture the physics
behind the supporting legs and the surface of water reasonably
well. Since all the analyses start from the assumption that the
surface of water breaks when the water–air interface stands
up vertical , it can be asserted that this
assumption made earlier is reasonable.
IV. ACTUATING MECHANISM
The desired motion of the actuating leg is a sculling motion
[12]. To create an elliptical path of the actuating leg, two 1-D
actuators can be superimposed. To design such a mechanism
with the least number of actuators is the first step to be taken.
A. T-Shape Mechanism
One of the simple ways of generating a 1-D motion out of
piezoelectric actuators is to make a unimorph [18]. The trajec-
tory of the motion of a unimorph placed at the end of another
unimorph, can create a 2-D motion if it is placed in the right
way. Here, a T-shape mechanism made of three piezoelectric
unimorph actuators is proposed, as shown in Fig. 9. H is called
the center actuator, and I and J are called the side actuators.
Attaching actuating legs to the end of the side actuators, theyare designed to create the necessary sculling motion. Fig. 9(b)

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 7/12
584 IEEE TRANSACTIONS ON ROBOTICS, VOL. 23, NO. 3, JUNE 2007
Fig. 9. Schematic of (a) the T-shape mechanism and (b) the dimension param-
eters (given in Table V). The coordinate system is different from that in Fig. 9.
shows the dimension parameters for the mechanism, which are
given in Table V.
Mechanism Analysis: A simplified unimorph setup is shown
in Fig. 10. In this model, the end tip de flection and the angle
can be found as [19]
(6)
where
(7)
TABLE V
PARAMETERS IN FIGS. 9 AND 10, AND (7)–(9)
Fig. 10. Schematic of a piezoelectric unimorph actuator. Parameters are de-scribed in Table V.
and are the area of the stainless steel base and the piezo-
electric ceramic, respectively. Other parameters are described in
Fig. 10 and Table V.
Assuming the deflection of the actuators to be small, the ho-
mogeneous transformation matrix and the localposition vector can be obtained as shown in the equation
at the bottom of the page, where
and is the sweep angle of the leg in Fig. 9.

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 8/12
SONG AND SITTI: SURFACE-TENSION-DRIVEN BIOLOGICALLY INSPIRED WATER STRIDER ROBOTS 585
Fig. 11. Side-view photo of the elliptical motion of the actuating leg generatedby the T-shape mechanism. The width of the ellipse is approximately 4 mm.
and are the vertical and horizontal actuator deflections,
respectively. Then the global position of the end tip of the actu-
ating leg can be found as
(8)
By simulation, it is estimated that the end tip of the actuatingleg will create the desired sculling motion. Experiments verified
this result as shown in Fig. 11.
B. Ampli fication of Motion
As noted earlier, the piezoelectricunimorph actuators provide
only small deflection. It is then important to amplify the motion
to create large strokes. Using a four-bar mechanism, as in [20],
would result in a heavier weight and an extensive fabrication
process. Instead, here, the unimorph deflection is amplified by
having a longer actuating leg and driving the mechanism in a
resonant frequency to make use of a vibration mode that is fa-
vorable to generating the sculling motion.
Assuming small deflection, the deflection of the side actuator
and the end tip angle is related as
(9)
And the displacement at the end of the actuating leg whose
length is
(10)
Then the amplification factor due to having a long actuating
leg is
(11)
Thus, having a long actuating leg is advantageous in ampli-
fying the motion. Note that this amplification is only for the hor-
izontal motion of the leg. Similar rule applies for the vertical
motion, but the amplification factor is smaller in this case un-
less the leg sweep angle, in Fig. 9, is large.
Having a long actuating leg may not be suf ficient to create
large motion out of small displacement of the actuator (typi-
cally less than 1 mm). Thus, the mechanism is driven in a reso-
nant frequency to enhance the overall amplification of motion.
ANSYS analysis showed that the third and fourth mode of vibra-tion of the mechanism can be advantageous for bigger strokes
(Fig. 12). For the T-shape mechanism with three 15-mm-long
unimorph with a 12 mm 3 mm piezoelectric actuator of thick-
ness 0.127 mm, it is found that the robot should be driven in the
frequency between 35.57 and 41.62 Hz to take advantage of the
vibration modes. For different sizes of actuators, these numbers
would change.
The quality factor of a typical piezoelectric unimorph in air ismeasured to be around 20. Attaching an actuating leg, this value
decreases to almost half due to the viscous damping of air. For
the case of this water strider robot, a part of the actuating leg is
in contact with water and the quality factor decreases even more.
Experiments showed that the quality factor drops down to as low
as 1.4. This means that the motion of the end tip of the actuator
will be amplified by 40%. This is significantly advantageous
since the amplification is directly reflected to the speed of the
actuating leg.
C. Actuating Leg
The motion of the part of the actuating leg that is touching
on water surface determines the motion of the whole robot. Thetrajectory of this part of the actuating leg is expected to followan
elliptical path. This path is a combination of sinusoidal motions
in and direction. Decoupled, these motions can be analyzed
separately. Terms used in this analysis is shown in Fig. 13.
The magnitude of the drag force created by the foot of the
actuating leg can be estimated by the following equation [21],
(12)
where is the density of water (1000 kg/m ), is the gravita-
tional constant (9.8 m/s ), is the viscosity of water (0.89 cP),
is the speed of the body, is the characteristic volume of thebody in consideration (in this case, it is the partial volume of the
foot), is the characteristic area of the body, is the charac-
teristic width of the body, is the depth of the body from the
original water surface, and is the surface tension coef ficient.
The first term is the form drag. The second term, which is the
buoyancy term, is mostly vertical but may contain a horizontal
component. The third term is the added inertia term. The fourth
term is the viscosity drag. The fifth term, which corresponds to
the surface tension force, that may also have a horizontal com-
ponent. the sixth term, called the Marangoni force, is zero since
there is no gradient in the surface tension .
Vertical Motion on Water: A large vertical motion of the ac-tuating leg is essential to create difference in drag forces in the
power stroke and the return stroke, as shown in Fig. 13. That
is, the center actuator (H in Fig. 9) is responsible for large
(Fig. 13), creating difference in the characteristic volume, area,
width and length between the two stroke phases. The larger
the difference in these parameters in the two stroke phases, the
larger the difference in drag force in each direction thus creating
more ef ficient propulsion.
While it is desirable to have a large deflection of the center
actuator, it is also important to make sure that the feet of the
actuating legs make similar size displacement. Since the actu-
ating leg is very thin and long, it may not properly transfer the
deflection of the center actuator to the foot. The bending stiff-ness of the actuating leg must be large enough to produce

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 9/12
586 IEEE TRANSACTIONS ON ROBOTICS, VOL. 23, NO. 3, JUNE 2007
Fig. 12. Vibration mode shapes of the driving mechanism. The top view of the third mode (left) and the fourth mode (right).
Fig. 13. Side view of the stroke and the trajectoryof the end tipof the actuating
leg.
only a small deflection compared to the size of the motion of thecenter actuator. Then it is first needed to determine the size of
the center actuator deflection .
From the analysis from the supporting leg design section, the
foot of the actuating leg should not push down on the surface of
water more than 3.8 mm for Teflon coated legs. It can also be
calculated that the leg must be pulled up above the undisturbed
water surface by 2.8 mm in order to be completely detached
from water. Considering these two extreme values, the vertical
motion range of the foot of the actuating leg must be at least
a third of the difference between the extremes, which is about
2.0 mm, to make any significance. It is always desirable to have
a larger motion in the center actuator, but for the size of thisrobot and the characteristics of the piezoelectric actuators, it is
hard to achieve a bigger motion.
Deciding the motion of the center actuator to be 2 mm, it can
then be proposed that must be large so to be deflected no
more than 0.2 mm (10% of 2 mm) by the possible maximum pull
back force or lift force at the foot on water surface. The possible
maximum pull back or lift force at the foot, , can
be found as
(13)
where is the length of the foot. It is then desirable to have
small to enable more compliant (longer) actuating leg, butit will also reduce the in (12) to result a smaller drag force.
Here, is chosen to be 1 cm, then the maximum pull back
or lift force at the foot is 1.44 mN. Then, must be at least
7.2 N/m. Since
(14)
where is the elastic modulus of the stainless steel (200 GPa)
and is the moment of inertia of the cross section of the leg,
the length of the actuating leg, , must be no longer
than 2.49 cm. (The diameter of the leg is 0.33 mm.)
The design parameters decided from this section is that
cm, cm, and the vertical motionrange of the center actuator to be around 2 mm. But as the actu-
ator size changes, these values will also change. This value can
also be larger, since they are derived assuming the maximum
lift or pull back force which can be avoided.
Horizontal Motion on Water: The horizontal motion pro-
duces drag forces that can propel the robot. The first step isto es-
timate the value of the speed of the actuating leg on water. With
a peak-to-peak driving ac signal of 200 V and a 24-mm-long ac-
tuator and 2.5-cm actuating leg, it is expected to create a stroke
of 5 mm at a resonant frequency of around 30 Hz. The max-
imum speed of the leg in this case on water is calculated to be
150 mm/s. Taking the average, the speed of the leg in one way(either or direction), isaround 0.3 m/s.Settingthe values
in (12) as those in Table VI, it is found that the form drag term
, the added inertia term , and the surface ten-
sion force term , are significant. Calculating the Weber
number confirms that the form drag term is of the same order of
magnitude with the surface tension force [21]. It should be noted
that the calculated surface tension term is not necessarily in the
direction of the propulsion. It is thus assumed that in average,
about 50% of this term is in the direction of the propulsion.
Estimation of the Speed: From the previous argument, the
propulsion force at the power stroke phase is about 0.71 mN.
With two of these legs, it is doubled to 1.42 mN in direc-
tion (forward). At the return stroke, the antipropulsion force of similar magnitude is present. The difference in these two forces

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 10/12
SONG AND SITTI: SURFACE-TENSION-DRIVEN BIOLOGICALLY INSPIRED WATER STRIDER ROBOTS 587
TABLE VI
TYPICAL VALUES OF THE PARAMETERS AND TERMS IN (12)
should be as large as possible, which means that the character-
istic volume, area and width must vary largely between the two
stroke phases.
The difference in the propulsion and antipropulsion forces
become larger if the and values in Fig. 13 are distinct.
(These are more accurate terms to use instead of .) Simulations
suggest that when is 2 mm, the difference between and
is roughly 0.6 mm. This is a significant difference since the
circumference of the leg is about 1 mm. The foot of the actuating
leg can be slightly bent up to create difference in the value of
to further increase the gap between the propulsion and the
antipropulsion forces.
However, it is dif ficult to exactly estimate how much theantipropulsion force will be. It is roughly estimated that the
antipropulsion force is about 50% of the propulsion force, or
0.71 mN, at its maximum. Since there are many parameters that
can affect these propulsion forces, this estimated value could
be inaccurate.
The forward ( direction) momentum generated per second,
, can be estimated as
(15)
where is the average propulsion force over a power stroke and
is the average antipropulsion force generated over a returnstroke. Then the steady state speed of the robot can be found as
(16)
where and are the characteristic area and width of the sup-
porting legs, and is the speed of the whole robot. The two
terms on the right-hand side of (16) are taken from (12), where
the buoyancy term and the Marangoni force term are neglected,
the added inertia term is zero, and the surface tension force is
also zero since the robot is too slow to create any asymmetry
in the surface of water around the supporting legs. Possible ex-
istence of the surface drag is also neglected because the sup-
porting legs are very thin. Using (16) for four supporting legsthat are 5-cm-long and using the force values of mN
and mN, the speed of the robot, , is calculated to
be 7.2 cm/s. At this speed, the form drag term is dominant over
the viscous drag term by nearly 20:1. As long as the speed of the
robot lies between 2-10 cm/s, the overall speed can be estimated
by considering just the form drag term. That is
(17)
which gives 7.3 cm/s in this case.
This value for the speed of the robot is only to set an order of
magnitude estimate. Since most of the numbers used in the pre-
vious analysis are rough estimates, this value of speed should
only be used as a raw comparison. However, the analysis sug-
gests that the speed of the robot is directly proportional to the
size of the stroke and the contact length, roughly proportional to
the driving frequency, and is largely affected by the difference
in characteristic geometry parameters between the two stroke
phases.
D. Design Summary
The aim of this section is to design and analyze an effective
propulsion mechanism. The T-shape mechanism shown in Fig. 9
generates both vertical and horizontal motion of the actuating
leg, creating an ellipsoidal path of the feet. From the previous
analysis, the following key results are derived.
1) The T-shape mechanism successfully generates elliptical
motion of the actuating legs.
2) The horizontal motion is amplified by having a long leg
and driving the mechanism at a resonant frequency.
3) It is important to have the actuating leg not too long so that
the motion of the center actuator is well transferred to the
leg foot.4) Having a large motion of the center actuator is favorable in
generating more ef ficient propulsion.
5) The speed of the robot can be estimated by (17) if it is be-
tween 2–10 cm/s. This yields an optimistic value of speed,
and the actual robot may be slower.
V. ROBOT FABRICATION
Using the design criteria for the supporting legs and the actua-
tion mechanism, a prototype robot is fabricated, with the carbon
fiber sheet as the body connecting the two features. Once the di-
mensions of the T-shape mechanism are chosen, the lengths of
the supporting and actuating legs can be derived accordingly.Here, the size of the piezoelectric actuator in the T-shape mech-
anism is chosen to be 24 mm 5 mm (0.127 mm thick), and the
stainless steel layer is 0.076 mm thick. The parameters for the
final robot is given in Table VII. With these values, the robot is
expected to move at the speed of 7.2 cm/s, and weigh approxi-
mately 1 g.
The piezoelectric actuators used in the T-shape mechanism
are cut with a laser micromachining system (GCC Inc., V-35).
The stainless parts are cut in a single piece and then folded to
make the T-shape as shown in Fig. 9. Since the weight of the
robot is about 1 g, having optimized shape for supporting legs
is unnecessary. Four 5-cm-long Teflon coated legs are fabricated
and glued to the body which is made of three interlacing layersof carbon fiber sheet (2 2 cm ). It is guaranteed that almost all

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 11/12
588 IEEE TRANSACTIONS ON ROBOTICS, VOL. 23, NO. 3, JUNE 2007
TABLE VII
DIMENSIONS OF THE PROTOTYPE ROBOT
Fig. 14. Photo of the fabricated prototype robot on the surface of water. Thelabels are consistent with Figs. 1 and 9.
of the supporting force is conservedsince the supporting legs are
at least 2 cm apart from one another. Fig. 14 shows the resulting
fabricated robot.
VI. EXPERIMENTS
The experiment setup consists of a signal generator (a com-
puter), an amplifier and the robot on the surface of water in a
container. Three analog signals of V are fed into the three-
channel piezo amplifier (Physik Instrumente, E-463). The fre-
quency of the raw signals, generated by a computer program, is
in the resonant frequency of the side actuators and legs (30 Hz).
With dc adjustment, these signals are amplified to 0 210 V
driving signals. These signals are intentionally kept unipolar for
the safety of the piezoelectric unimorphs. It is observed that
when a unimorph is fed with a positive potential greater than
60 V, the piezoceramic fails. For the negative signals, the uni-morphs work stably down to 300 V. By changing the phase
differences between the signals, the robot can be driven in var-
ious directions. If a side actuator is given a signal that lags 90
compared to the signal to the center actuator, the leg attached
to this side actuator works so to propels the robot forward (
direction). If this signal leads the center actuator signal by 90 ,
then the leg propels the robot backward ( direction). If both
of the legs propels the robot to either or direction, then
the robot goes backward or forward, respectively. If one leg pro-
pels the robot forward and the other backward, then the robot
turns to the left or right.
The robot is first put on the surface of water then the wiring
is connected. Before feeding in the signals, the initial positionof the actuating legs are adjusted. For the robot in Fig. 14, the
Fig. 15. Snapshots of the different motionsof the robot on the surface of water.(a) Forward motion of 3 cm/s (b) Right turn of 0.5 rad/s.
actuating legs had to be bent up or down accordingly to have the
feet just touch the surface of water before starting to feed in the
signals.
Fig. 15 shows the forward motion and the right turn of the
robot. The forward speed of the robot is measured to be 3 cm/s,and the rotational speed is 0.5 rad/s. These values possess some
error since the motion of the robot is affected by the microwires.
Though the wires used are very thin, the light weight of the
robot and the low friction on water surface made the experiment
sensitive to the presence of the wires.
The ef ficiency of the locomotion of the robot is around
6%. Here, the total electrical energy input to the unimorph
actuators is around 375 W where the single unimorph
actuator capacitance is 25 nF, and the mechanical energy
output is around 21 W for a robot speed of 3 cm/s and around
0.71 mN theoretical propulsion force. This ef ficiency can be
increased by improving the piezo actuator driving electronicsef ficiency [22].
The robot also successfully demonstrated controlled motion
in every direction, including the backward and left turn. The
forward speed of the robot measured in the experiment is only
42% of the expected velocity of 7.2 cm/s. Although the theoret-
ical estimation is highly optimistic, there can be other sources of
error. For example, the body of the robot is too light. Since the
weight of the T-shape mechanism is more than half the weight
of the whole robot, vertical vibration of the mechanism would
not only shake the actuating legs but also create a vertical mo-
tion of the body and the supporting legs to the other direction,
reducing the absolute vertical motion of the actuating legs. How
a heavier body would enhance the motion of the robot is left forfuture research.

7/21/2019 Y.S. Song Surface-Tension-Driven Biologically Inspired Water Strider Robots
http://slidepdf.com/reader/full/ys-song-surface-tension-driven-biologically-inspired-water-strider-robots 12/12
SONG AND SITTI: SURFACE-TENSION-DRIVEN BIOLOGICALLY INSPIRED WATER STRIDER ROBOTS 589
VII. CONCLUSION
In this paper, a miniature robot that mimics the key features
of the insect water strider is analyzed and developed, demon-
strating a new possibility of controlled locomotion of miniature
robots on the surface of water. The proposed supporting leg de-
sign rules in Section III-D enable a predictable stability of the
robot on the surface of water, and the T-shape mechanism inSection IV is successful in creating motion trajectory of the ac-
tuating legs to effectively propel the robot. The robot does not
break the surface tension of the water, like its natural counter-
part. A 9.3-g payload was supported with a prototype robot with
twelve optimized supporting legs. The final 1-g robot, driven at
one of the resonant frequencies of the T-shape mechanism, can
perform a linear motion of 3 cm/s and a rotation of 0.5 rad/s.
More indepth studies, to improve the ef ficiency of the loco-
motion or to use different actuators such as micromotors with
on-board electronics, are left for further research. In the future,
this robot can be used in various applications such as environ-
mental monitoring on lakes, dams, rivers or sea with wireless
communication devices and biochemical sensors on board, or
as educational and toy robots.
ACKNOWLEDGMENT
The authors would like to thank F. Chung for his help on
fabrication and experiments, S. H. Suhr and S. J. Lee for their
earlier works, and J. Bush for his comments.
REFERENCES
[1] C. Menon, M. Murphy, and M. Sitti, “Gecko inspired surface climbingrobots,” Proc. IEEE Int. Conf. Robot. Biomimetics (ROBIO), pp.431–436, 2004.
[2] C. Menon and M. Sitti, “Biologically inspired adhesion based climbing
robots,” J. Bionic Eng., vol. 3, no. 3, pp. 115–126, Sep. 2006.[3] O. Unver, A. Uneri, A. Aydemir, and M. Sitti, “Geckobot: A gecko
inspired climbing robot using elastomer adhesives,” Proc. IEEE Int.Conf. Robot. Autom., pp. 2329–2335, 2006.
[4] F. Chiu, J. Guo, J. Chen, and Y. Lin, “Dynamic characteristic of abiomimetic underwater vehicle,” Proc. IEEE Int. Symp. Underwater Technol., pp. 172–177, 2002.
[5] B. Kim, D. H. Kim, J. Jung, and J. O. Park, “A biomimetic undulatorytadpole robot using ionic polymer-metal composite actuators,” Smart
Mater. Struct. , vol. 14, pp. 1579–1585, 2005.[6] S. Guo, Y. Okuda, and K. Asaka, “Hybrid type of underwater micro
biped robot with walking and swimming motions,” Proc. IEEE Int.Conf. Mech. Autom., pp. 1604–1609, 2005.
[7] X. Deng and S. Avadhanula, “Biomimetic micro underwater vehiclewith oscillating fin propulsion: Systemdesign and force measurement,”Proc. IEEE Int. Conf. Robot. Autom., pp. 3312–3317, 2005.
[8] J. E. Clark, J. G. Cham, S. A. Bailey, E. M. Froehlich, P. K. Nahata,
R. J. Full, and M. R. Cutkosky, “Biomimetic design and fabrication of a hexapedal running robot,” in Proc. IEEE Int. Conf. Robot. Autom.,2001, vol. 4, pp. 3643–3649.
[9] N. Hasegawa and H. Kazerooni, “Biomimetic small walking machine,”Proc. IEEE/ASME Int. Conf. Adv. Intell. Mech. , pp. 971–979, 2001.
[10] U. Saranli, M. Buehler, and D. E. Koditschek, “Design, modeling andpreliminary control of a compliant hexapod robot,” Proc. IEEE Int.Conf. Robot. Autom., pp. 2589–2596, 2000.
[11] R. S. Fearing, K. H. Chiang, M. H. Dickinson, D. L. Pick, M. Sitti, andJ. Yan, “Wing transmission for a micromechanical flying insect,” Proc.
IEEE Int. Conf. Robot. Autom., pp. 1509–1516, 2000.[12] D. L. Hu, B. Chan, and J. W. M. Bush, “The hydrodynamics of water
strider locomotion,” Nature, vol. 424, pp. 663–666, 2003.[13] X. Gao and L. Jiang, “Water-repellent legs of water striders,” Nature,
vol. 432, p. 36, 2004.
[14] S. H. Suhr, Y. S. Song, S. J. Lee, and M. Sitti, “Biologically inspiredminiature water strider robot,” Proc. Robot.: Sci. Syst. I , pp. 319–325,2005.
[15] J. B. Keller, “Surface tension force on a partially submerged body,”Phys. Fluids, vol. 10, pp. 3009–3010, 1998.
[16] D. Vella, D. G. Lee, and H. Y. Kim, “The load supported by smallfloating objects,” Langmuir , vol. 22, pp. 5979–5981, 2006.
[17] D. Vella, P. D. Metcalfe, and R. J. Whittaker, “Equilibrium conditionsfor the floatingof multiple interfacialobjects,” J. Fluid Mech., vol. 549,
pp. 215–224, 2006.[18] M. Sitti, D. Campolo, J. Yan, and R. S. Fearing, “Development of
PZT and PZN-PT based unimorph actuators for micromechanical flap-ping mechanisms,” Proc. IEEE Int. Conf. Robot. Autom., vol. 4, pp.3839–3846, 2001.
[19] M. S. Weinberg, “Working equations for piezoelectric actuators andsensors,” J. Microelectromech. Syst., vol. 8, no. 4, pp. 539–533, Dec.1999.
[20] M. Sitti, “Piezoelectrically actuated four-bar mechanism with twoflexible links for micromechanical flying insect thorax,” ASME/IEEE Trans. Mechatron., vol. 8, no. 1, pp. 26–36, 2003.
[21] J. W. M. Bush and D. L. Hu, “Walking on water: Biolocomotion at theinterface,” Annu. Rev. Fluid Mech., vol. 38, pp. 339–369, 2006.
[22] D. Campolo, M. Sitti, and R. S. Fearing, “Ef ficient charge recoverymethod for driving piezoelectric actuators in low power applications,”
IEEE Trans. Ultrason., Ferroelectr., Freq. Contr., vol. 50, no. 3, pp.237–244, Mar. 2003.
Yun Seong Song (S’06) received the B.Sc. degreesin mechanical engineering and computer science andengineering from Seoul National University, Seoul,Korea, in 2004, and the M.Sc. degree in mechanicalengineering from Carnegie Mellon University, Pitts-burgh, PA, in 2006. He is currently working towardthe Ph.D. degree in mechanical engineering at Mass-achusetts Institute of Technology, Cambridge.
His research interests include the design and con-trol of bioinspired systems and machines interacting
with biological systems.Mr.Song received theSamsung Scholarship forM.Sc.degreestudentsduring
his two years at Carnegie Mellon University, and the same scholarship for Ph.D.
degree students in 2006.
Metin Sitti (S’94–M’00) received the B.Sc. and
M.Sc. degrees in electrical and electronic engi-neering from Bogazici University, Istanbul, Turkey,in 1992 and 1994, respectively, and the Ph.D. degreein electrical engineering from the University of Tokyo, Tokyo, Japan, in 1999.
He worked in the CAD/CAM Robotics Depart-ment in the TUBITAK Marmara Research Center,Kocaeli, Turkey, as a Research Engineer during1994–1996. He was a Research Scientist and Lec-turer at the Department of Electrical Engineering and
Computer Sciences, University of California at Berkeley during 1999–2002. He
is currently an Assistant Professor at the Mechanical Engineering Department
and the Robotics Institute, Carnegie Mellon University, Pittsburgh, PA. Hisresearch interests include micro/nanoscale robotic dynamics, systems, and con-trol, biologically inspired miniature robots, and micro/nanoscale manipulationand manufacturing systems.
Dr. Sitti received the National Science Foundation CAREER award and theCMU Struminger award in 2005. He is elected as the Distinguished Lecturerfor the IEEE Robotics and Automation Society for 2006–2008. He received theBest Paper Award in the IEEE/RSJ International Conference Intelligent Robotsand Systems in 1998, the Best Video Award in the IEEE Robotics and Au-tomation Conference in 2002, and the Best Biomimetics Paper Award in the
IEEE Robotics and Biomimetics Conference in 2004. He is the Chair of theIEEE Nanotechnology Council, Nanorobotics, and Nanomanufacturing Tech-nical Committee and Co-Chair of the IEEE Robotics and Automation Society,
Rapid Prototyping in Robotics and Automation Technical Committee. He is amember of ASME, AAAS, and Robotics Society of Japan.