Yanlin Shao Odd M. Faltinsen2 - CESOS - NTNU Shao.pdf · Yanlin Shao1 Odd M. Faltinsen2 1 Ship...
30
Yanlin Shao 1 Odd M. Faltinsen 2 1 Ship Hydrodynamics & Stability, Det Norsk Veritas, Norway 2 Centre for Ships and Ocean Structures (CeSOS), NTNU, Norway 1
Transcript of Yanlin Shao Odd M. Faltinsen2 - CESOS - NTNU Shao.pdf · Yanlin Shao1 Odd M. Faltinsen2 1 Ship...
Yanlin Shao1
Odd M. Faltinsen2
1 Ship Hydrodynamics & Stability, Det Norsk Veritas, Norway 2 Centre for Ships and Ocean Structures (CeSOS), NTNU, Norway
1

2
The state-of-the-art potential flow analysis: Boundary Element Method (BEM)
A Cruise Ship A numerical model for BEM
Unknowns distributed on wetted ship surface and water surface
Tune the unknowns so that all boundary conditions and governing equations are satisfied
Still time consuming when it comes to fully-nonlinear problems
2
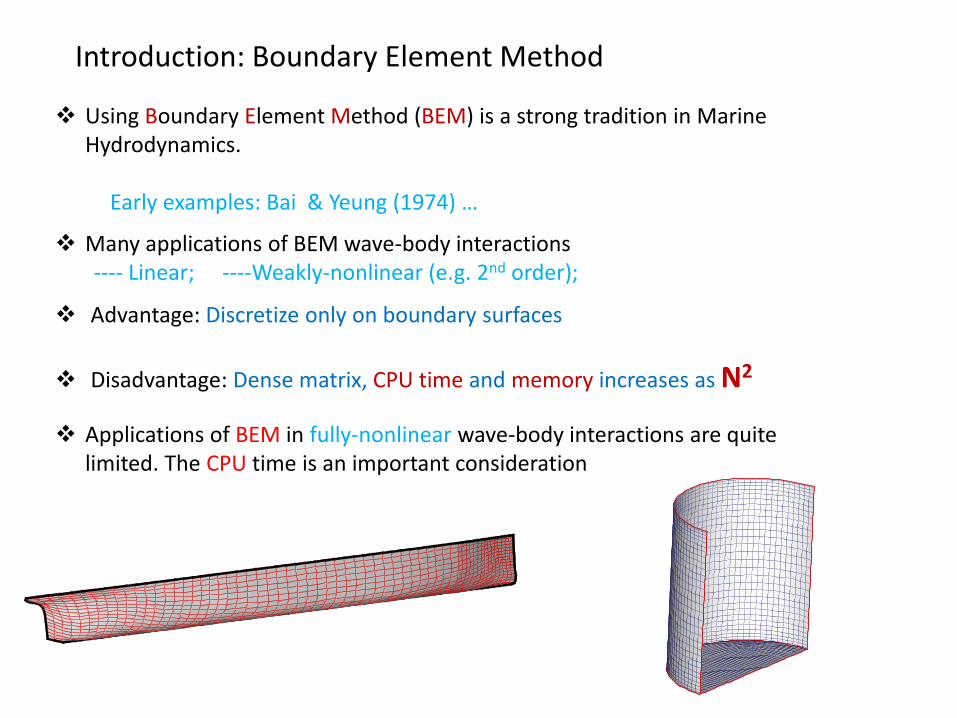
Using Boundary Element Method (BEM) is a strong tradition in Marine Hydrodynamics.
Early examples: Bai & Yeung (1974) …
Introduction: Boundary Element Method
Many applications of BEM wave-body interactions ---- Linear; ----Weakly-nonlinear (e.g. 2nd order); Advantage: Discretize only on boundary surfaces
Disadvantage: Dense matrix, CPU time and memory increases as N2
Applications of BEM in fully-nonlinear wave-body interactions are quite limited. The CPU time is an important consideration

Volume methods are found to be very efficient in terms of CPU time. Advantages to operate with sparse matrix.
Examples: FEM: Wu & Eatock Taylor (1995) , Wang & Wu (2001) FDM: Bingham & Zhang (2007), Engsig-Karup et al. (2009) Advantage: Operate with sparse matrix
Disadvantage: Mesh generation in whole fluid domain
Introduction: Volume Methods
XY
Z
Frame 001 29 Jun 2012 3d contour
Euler’s memoir ‘Principia motus fluidorum’ (Euler, 1756–1757)
English translation available at www.oca.eu/etc7/EE250/texts/euler1761eng.pdf
Leonhard Euler (1707-1783)
Harmonic Polynomials

Use polynomials to represent velocity potential Constraints on coefficients in order to satisfy Laplace equation
, ,x y z
2 0
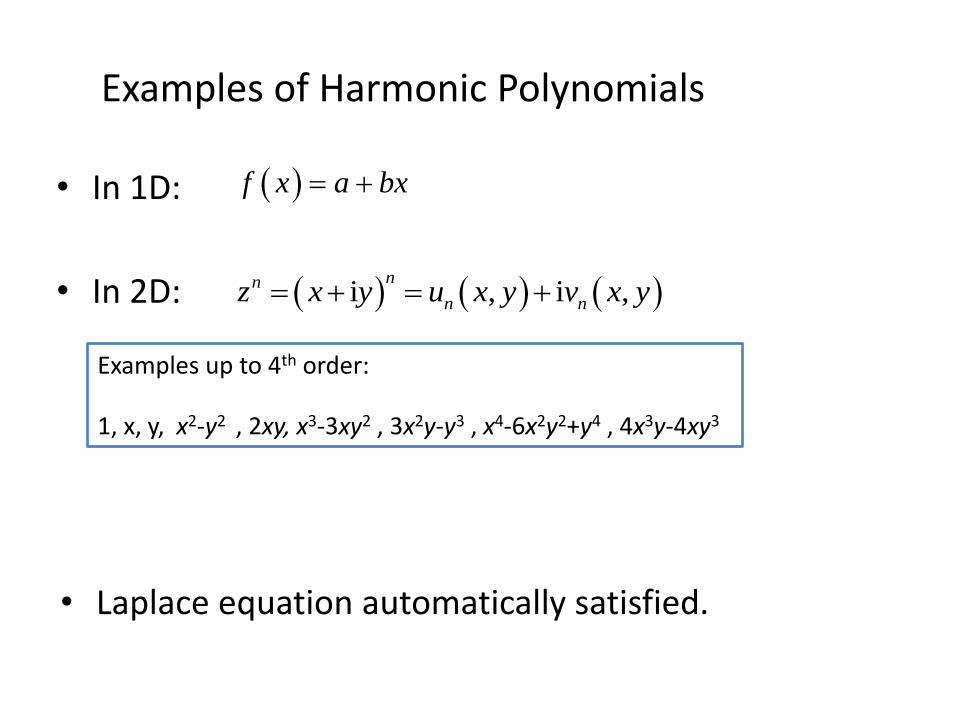
Examples of Harmonic Polynomials
• In 2D: i , i ,nn
n nz x y u x y v x y
Examples up to 4th order:
1, x, y, x2-y2 , 2xy, x3-3xy2 , 3x2y-y3 , x4-6x2y2+y4 , 4x3y-4xy3
• Laplace equation automatically satisfied.
• In 1D: f x a bx
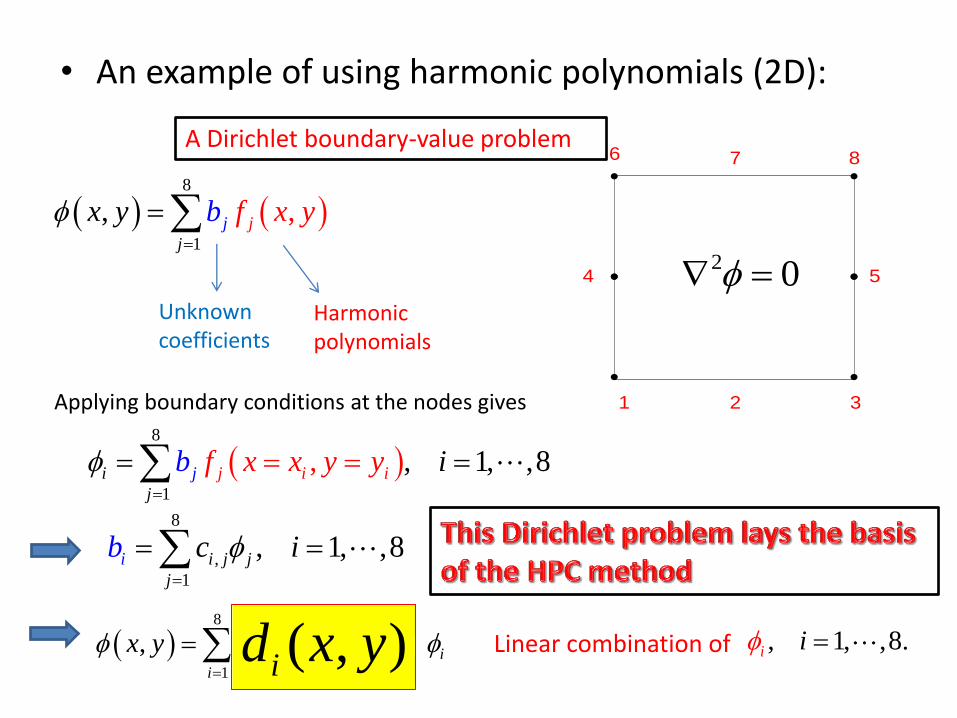
• An example of using harmonic polynomials (2D):
A Dirichlet boundary-value problem
1 2 3
4 5
6 7 8
2 0
8
1
,, j
j
j f x yx by
Unknown coefficients
Harmonic polynomials
Applying boundary conditions at the nodes gives
8
1
, 1,, ,8j ii j
j
if x x y y ib
8
,
1
, 1, ,8i i j j
j
c ib
8 8
,
1 1
, ,j i j i
i j
x y c f x y
Linear combination of , 1, ,8.i i ( , )id x y
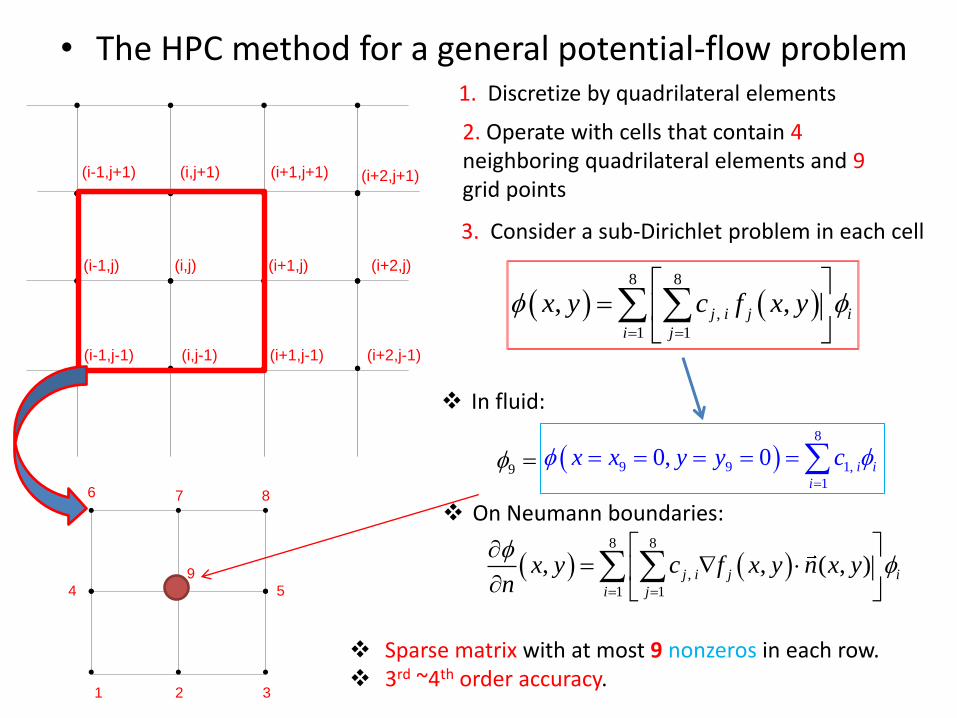
• The HPC method for a general potential-flow problem
(i,j) (i+1,j) (i+2,j)(i-1,j)
(i-1,j-1) (i,j-1) (i+1,j-1) (i+2,j-1)
(i,j+1) (i+1,j+1) (i+2,j+1)(i-1,j+1)
1. Discretize by quadrilateral elements
2. Operate with cells that contain 4 neighboring quadrilateral elements and 9 grid points
1 2 3
4 5
6 7 8
9
3. Consider a sub-Dirichlet problem in each cell
8 8
,
1 1
, ,j i j i
i j
x y c f x y
9
In fluid:
On Neumann boundaries:
8 8
,
1 1
, , ( , )j i j i
i j
x y c f x y n x yn
8
9 9 1,
1
0, 0 i i
i
x x y y c
Sparse matrix with at most 9 nonzeros in each row. 3rd ~4th order accuracy.

Efficiency & Accuracy
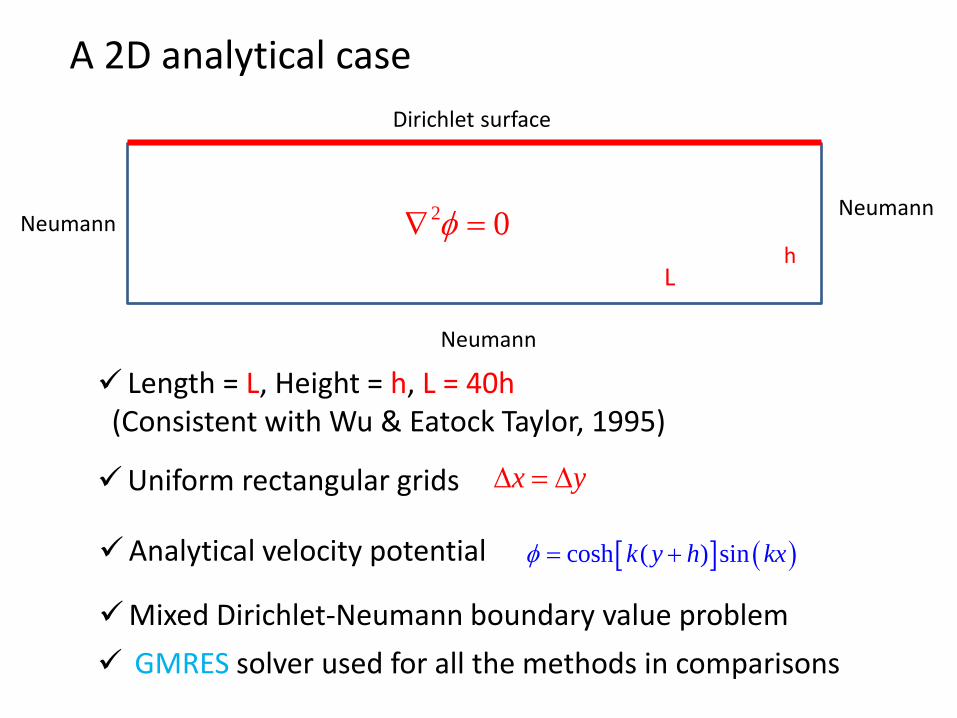
A 2D analytical case
Dirichlet surface
Neumann
2 0 Neumann Neumann
L h
Length = L, Height = h, L = 40h (Consistent with Wu & Eatock Taylor, 1995)
Uniform rectangular grids x y
Analytical velocity potential cosh ( ) sink y h kx
Mixed Dirichlet-Neumann boundary value problem
GMRES solver used for all the methods in comparisons

103
2x103
3x103
0.1
1
10
C
PU
tim
e (
s)
Number of unknowns
BEM
FMM-BEM
FVM
LPC
HPC
103
2x103
3x103
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
101
FVM
LPC
HPC
L2 e
rro
rs
Number of unkowns
FMM-BEM, Dirichlet surface
FMM-BEM, Neumann surface
103
2x103
3x103
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
101
FVM
LPC
HPC
FMM-BEM, Dirichlet surface
FMM-BEM, Neumann surface
L2 E
rrors
Number of Unknowns
For a given accuracy, HPC performs best
N: number of unknowns corresponding to BEMs
N
CPU time
N N
L2 errors
L2 errors
kh=1.0
kh=6.28
HPC-2D
Required CPU time to achieve 10-4 accuracy
FMM-BEM: > 1 sec
BEM: much much longer time
HPC: 0.06 sec
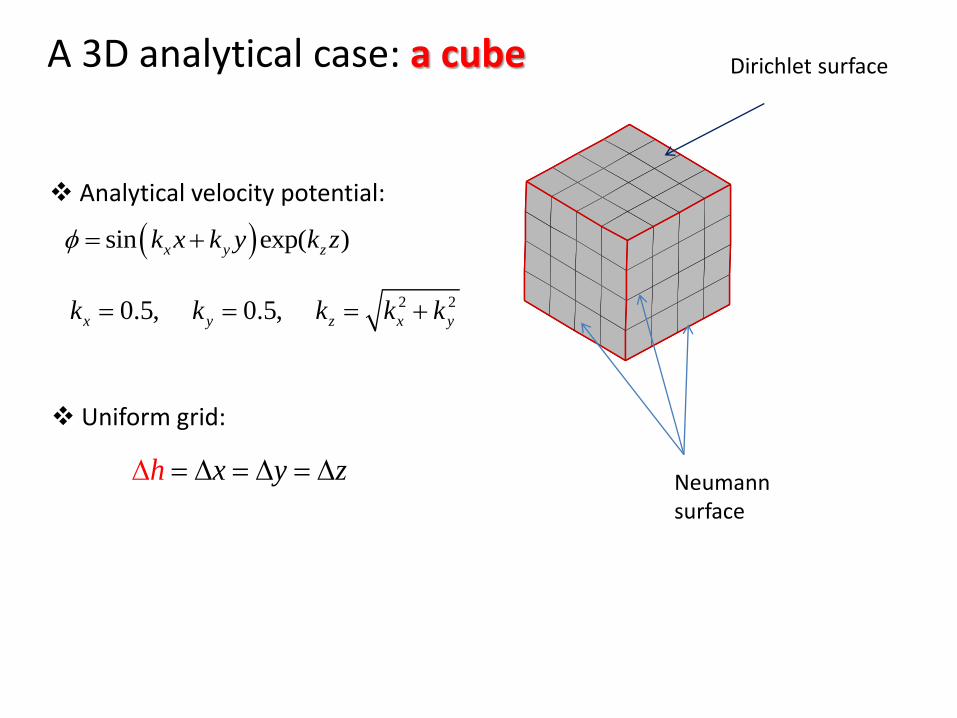
Dirichlet surface
Neumann surface
Analytical velocity potential:
sin exp( )x y zk x k y k z
Uniform grid:
2 20.5, 0.5,x y z x yk k k k k
yh x z
X Y
Z
F ram e 0 0 1 1 7 Apr 2 0 1 2 pane l on episode solid
A 3D analytical case: a cube
10-2
10-1
100
10-9
10-8
10-7
10-6
10-5
10-4
10-3
k = 3.896
k = 3.346
h=2x=2y=2z
L2 e
rro
rs
SD, QBEM
SN, QBEM
SD, HPC
SN, HPC
k = 2.712
k = 3.610
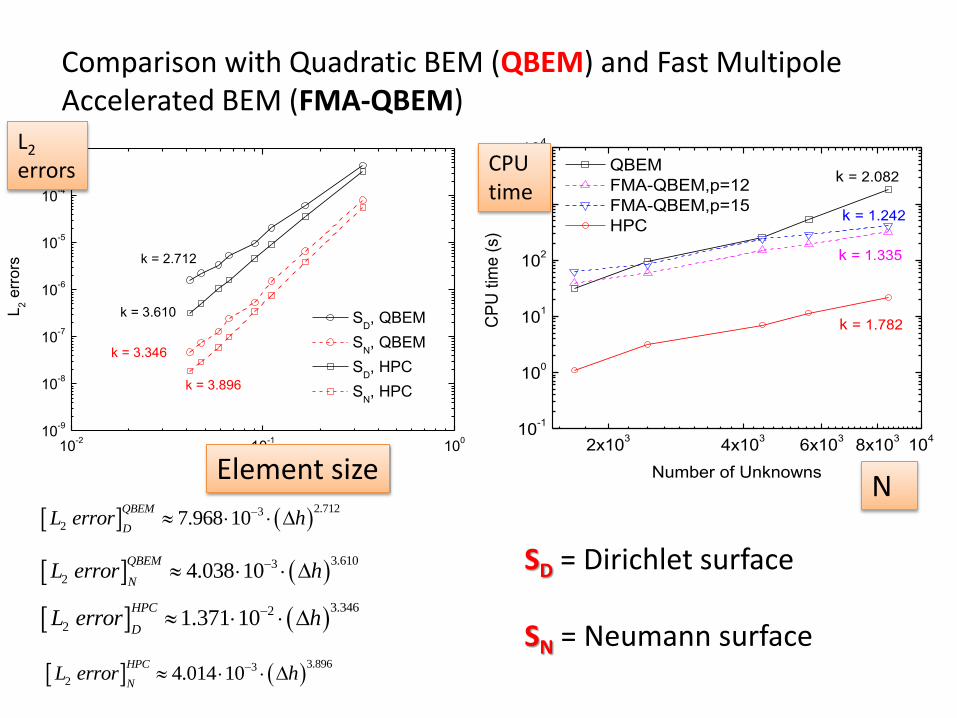
Comparison with Quadratic BEM (QBEM) and Fast Multipole Accelerated BEM (FMA-QBEM)
2x103
4x103
6x103
8x103
104
10-1
100
101
102
103
104
k = 1.782
k = 1.242
k = 1.335
CP
U t
ime
(s)
Number of Unknowns
QBEM
FMA-QBEM,p=12
FMA-QBEM,p=15
HPC
k = 2.082
SD = Dirichlet surface SN = Neumann surface
L2 errors
Element size N
CPU time
2.7123
2 7.968 10QBEM
DL error h
3.6103
2 4.038 10QBEM
NL error h
3.3462
2 1.371 10HPC
DL error h
3.8963
2 4.014 10HPC
NL error h

15
Applications of HPC-2D
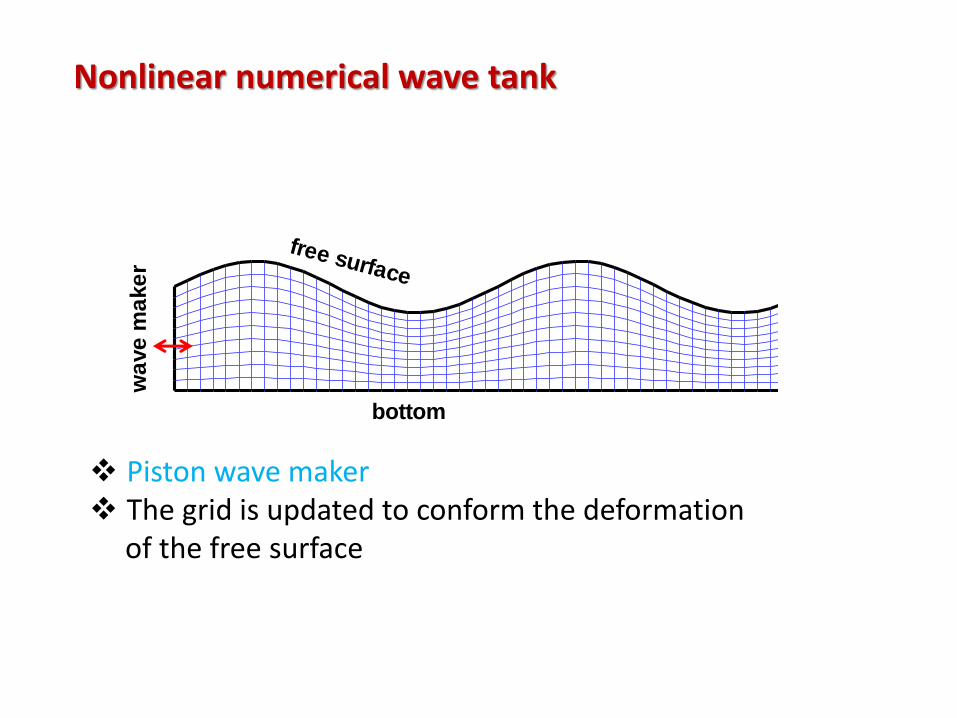
Nonlinear numerical wave tank
free surface
bottom
wa
ve
ma
ke
r
Frame 001 16 Feb 2012 contour lines
Piston wave maker The grid is updated to conform the deformation of the free surface
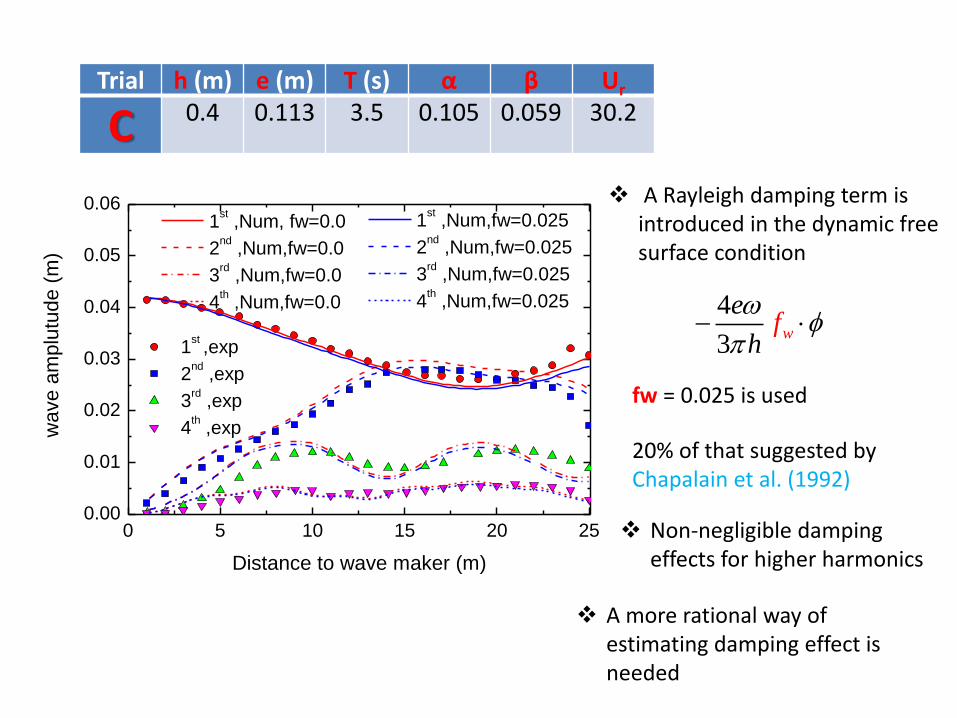
Trial h (m) e (m) T (s) α β Ur
C 0.4 0.113 3.5 0.105 0.059 30.2
0 5 10 15 20 250.00
0.01
0.02
0.03
0.04
0.05
0.06
1st ,Num,fw=0.025
2nd
,Num,fw=0.025
3rd ,Num,fw=0.025
4th ,Num,fw=0.025
1st ,Num, fw=0.0
2nd
,Num,fw=0.0
3rd ,Num,fw=0.0
4th ,Num,fw=0.0
wave a
mplu
tude (
m)
Distance to wave maker (m)
1st
,exp
2nd
,exp
3rd ,exp
4th ,exp
4
3w
e
hf
A Rayleigh damping term is introduced in the dynamic free surface condition
fw = 0.025 is used
20% of that suggested by Chapalain et al. (1992)
Non-negligible damping effects for higher harmonics
A more rational way of estimating damping effect is needed

20 21 22 23 24 25 26-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
(
m)
t (s)
Num. Exp.
26 27 28 29 30 31 32-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
(
m)
t (s)
Num. Exp.
28 29 30 31 32 33 34-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
t (s)
(
m)
Num. Exp.
35 36 37 38 39 40 41-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
Num. Exp.
t (s)
(
m)
0.4m
0.3m1:
20
1:1
0
6m
6m
2m
3m
13m
12.5m
14.5m
17.3m
21m
Nonlinear waves over submerged trapezoidal bar
Experiments results available from : Beji & Battjes (1993), Luth et al. (1994)
x = 12.5 m x = 14.5 m
x = 17.3 m x = 21 m

19
Applications of HPC-3D
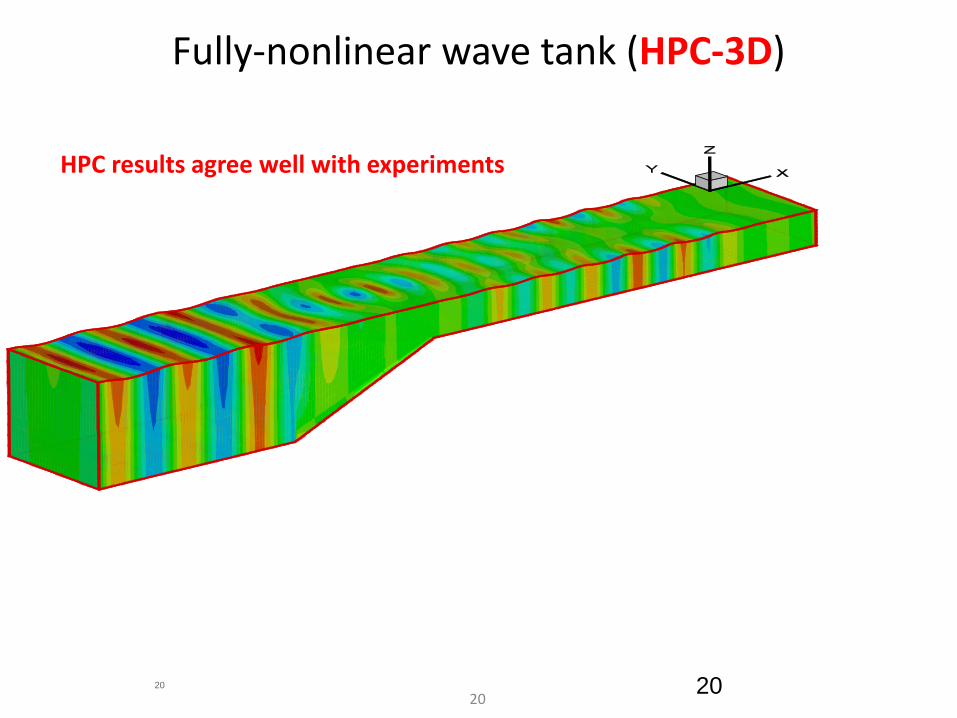
Fully-nonlinear wave tank (HPC-3D)
20 20
XY
ZF ram e 0 0 1 0 2 M ay 2 0 1 2 3 d m eshes | 2 d m esh
Water surface
Sea floor
20
HPC results agree well with experiments

0 5 10 15 20 25 30 350.000
0.004
0.008
0.012
0.016
0.020
0.024
x (m)
wa
ve
am
plit
ud
e (
m)
1st harmonic,exp.
2nd
harmonic,exp.
3rd harmonic,exp.
1st harmonic,num.
2nd
harmonic,num.
3rd harmonic,num.
0 5 10 15 20 25 30 350.000
0.004
0.008
0.012
0.016
wa
ve
am
plit
ud
e (
m)
x (m)
1st harmonic,exp.
2nd
harmonic,exp.
3rd harmonic,exp.
1st harmonic,num.
2nd
harmonic,num.
3rd harmonic,num.
T = 2s; kA = 0.012 T = 2s; kA = 0.017
F ram e 0 0 1 0 9 M ay 2 0 1 2 3 d contour

Fully-nonlinear wave diffraction (HPC-3D)
22 22
Higher order horizontal wave forces in harmonic waves
Comparisons with numerical (Ferrant) and experimental (Huseby&Grue) results
F ra m e 0 0 1 2 2 J a n 2 0 1 3 4 -n o d e s F E M p a n e ls | F E - V o lu m e B ric k D a ta
23
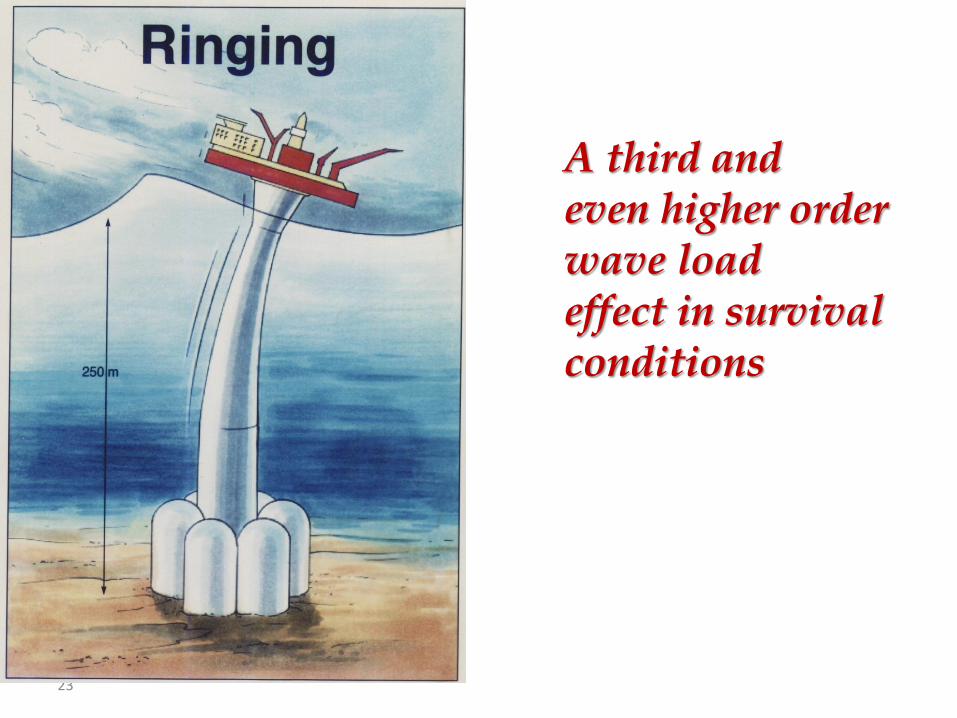
A third and even higher order wave load effect in survival conditions

24
0.00 0.05 0.10 0.15 0.20 0.256.0
6.2
6.4
6.6
6.8
7.0
7.2
kA
Present
Ferrant
|F1| /gA
R2
Analytical
Experiment
2
aF
gAR
0.00 0.05 0.10 0.15 0.20 0.25
0.8
1.2
1.6
2.0
2.4
kA
Arg
(F1)
Analytical
Experiment
Present
Ferrant
arg F
0.00 0.05 0.10 0.15 0.20 0.250.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
kA
Analytical
Experiment
Present
Ferrant
|F2| /gA
2R
2
2
aF
gA R
0.00 0.05 0.10 0.15 0.20 0.250.0
0.5
1.0
1.5
2.0
2.5
3.0
Arg
(F2)
kA
Present
Ferrant
A
Analytical
Experiment
2arg F
0.00 0.05 0.10 0.15 0.20 0.25-3
-2
-1
0
1
2
3
kA
Arg
(F3)
A
Analytical
Experiment
Present
Ferrant
3arg F
0.00 0.05 0.10 0.15 0.20 0.251
2
3
4
kA
Arg
(F4)
Experiment
Ferrant
Present
A
4arg F
0.00 0.05 0.10 0.15 0.20 0.250.0
0.1
0.2
0.3
0.4
kA
|F3| /gA
3
Present
Ferrant
A
Analytical
Experiment
3
3
aF
gA
0.00 0.05 0.10 0.15 0.20 0.250.0
0.1
0.2
0.3
0.4
0.5
kA
|F
4| /gA
4R
-1 Experiment
Ferrant
Present
4
4 1
aF
gA R
20.245, /g=wave number, radius, wave amplitudekR k R A
25 25
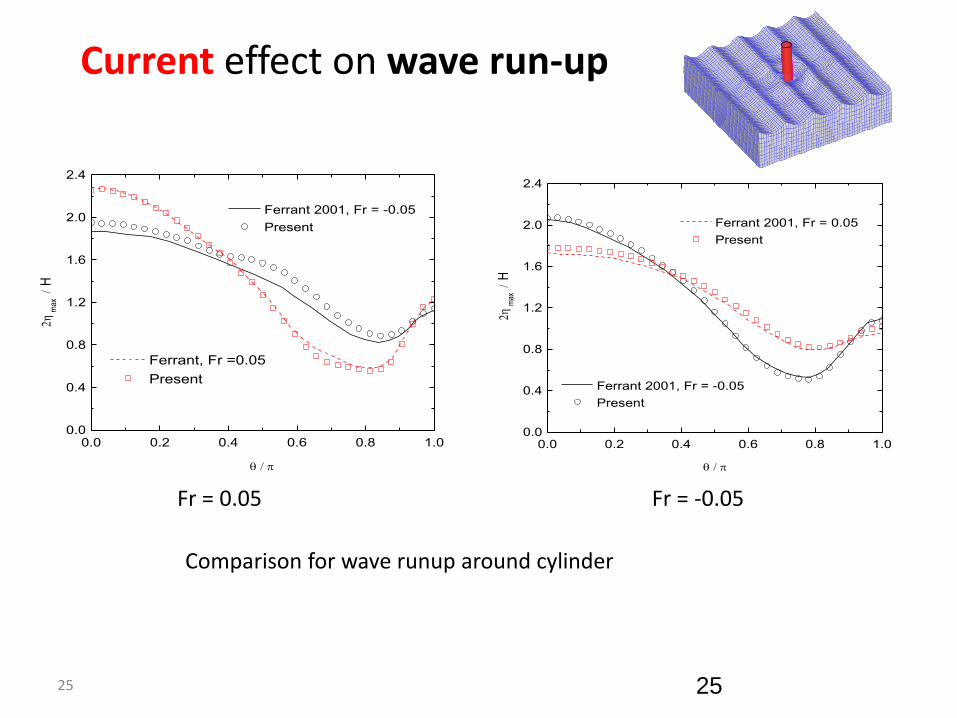
Current effect on wave run-up
0.0 0.2 0.4 0.6 0.8 1.00.0
0.4
0.8
1.2
1.6
2.0
2.4
m
ax
H
Ferrant, Fr =0.05
Present
Ferrant 2001, Fr = -0.05
Present
0.0 0.2 0.4 0.6 0.8 1.00.0
0.4
0.8
1.2
1.6
2.0
2.4
Ferrant 2001, Fr = -0.05
Present
m
ax
H
Ferrant 2001, Fr = 0.05
Present
F ra m e 0 0 1 2 2 J a n 2 0 1 3 4 -n o d e s F E M p a n e ls | F E - V o lu m e B ric k D a ta
Comparison for wave runup around cylinder
Fr = 0.05 Fr = -0.05

Sloshing
0 4 8 12 16 20 24 28-0.08
-0.04
0.00
0.04
0.08
ele
va
tio
n a
t P
1 (
m)
time (s)
HPC
Exp.
Forced oscillation: XT= 0.005L cos(30o), YT= 0.005L sin(30o)
10.90
0 10 20 30 40-0.10
-0.05
0.00
0.05
0.10
ele
va
tio
n a
t P
1 (
m)
time (s)
HPC
Exp.
10.93
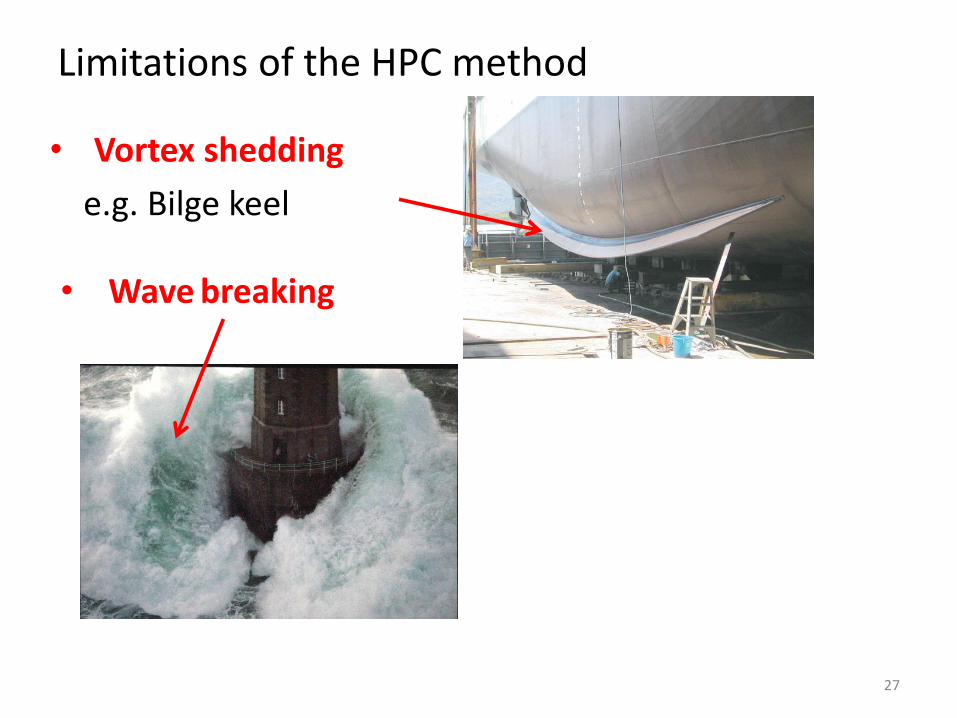
Limitations of the HPC method
• Vortex shedding
e.g. Bilge keel
• Wave breaking
27

A clever strategy: Domain Decomposition
Potential-flow solver
Breaking Fragmentation Air entrainment Viscosity
More advanced solver
Efficiency Accuracy
28

Thank you !

References
• Bai K. J., Yeung R.W., Numerical solutions to free-surface flow problems, Proceedings of 10th Symposium on Naval Hydrodynamics, Cambridge, MA, 1974.
• Wu GX, Eatock Taylor (1995) Time stepping solutions of the two-dimensional nonlinear wave radiation problem. Ocean Engng. 22(8), 785-798.
• Bingham H.B., Zhang H., On the accuracy of finite difference solutions for nonlinear water waves. J. Engineering Math., 58, 211-228, 2007.
• Chapalain G, Cointe R, Temperville A., Observed and modeled resonantly interacting progressive water-waves. Costal Engineering, 16, 267-300, 1992.
• Luth H.R., Klopman G., Kitou N., Kinematics of waves breaking partially on an offshore bar; LDV measurements of waves with and without a net onshore current. Report H-1573, Delft Hydraulics, 1994.
• P. Ferrant, Fully nonlinear interactions of long-crested wave packets with a three dimensional body. In Proceedings of 22nd ONR Symp. in Naval Hydrodynamics, 59-72, 1998.
• A.P. Engsig-Karup, H.B. Bingham, O. Lindberg, An efficient flexible-order model for 3D nonlinear water waves. J. Comput. Phys. 228 (2009) 2100-2118.
• C.H.Wu, O.M. Faltinsen, B.F. Chen, Time-independent finite difference and ghost cell method to study sloshing liquid in 2d and 3d tanks with internal structures. Commun. Comput. Phys. 13 (2013) 780-800.
• Ferrant P., Runup on a cylinder due to waves and current: potential flow solution with fully nonlinear boundary conditions. International Journal of Offshore and Polar Engineering. 11(1), 2001.
• Euler L., Principles of the motion of fluids, Physica D: Nonlinear Phenomena 237 (2008) 1840-1854.
• Shao Y.L., Faltinsen O.M., Towards efficient fully-nonlinear potential-flow solvers in marine hydrodynamics. in: Proc. of the 31st Int. Conf. on Ocean, Offshore and Arc. Eng. (OMAE). Rio de Janeiro, Brazil, 2012.
• Shao Y.L., Faltinsen O.M., A Harmonic polynomial cell (HPC) method for 3D Laplace equation with application in marine hydrodynamics. Submitted for journal publication.
• Shao Y.L., Faltinsen O.M., Use of body-fixed coordinate system in analysis of weakly-nonlinear wave-body problems. Appl. Ocean Res., 32, 1, 20-33, 2010.