What Does Motion Reveal About Transparency ?
40
What Does Motion Reveal About Transparency ? Moshe Ben-Ezra and Shree K. Nayar Columbia University ICCV Conference October 2003, Nice, France is work was supported by an NSF ITR Award IIS-00-85
description
What Does Motion Reveal About Transparency ?. Moshe Ben-Ezra and Shree K. Nayar Columbia University ICCV Conference October 2003, Nice, France. This work was supported by an NSF ITR Award IIS-00-85864. Transparency is Very Challenging. Existence of a transparent object. - PowerPoint PPT Presentation
Transcript of What Does Motion Reveal About Transparency ?

What Does Motion Reveal About Transparency ?
Moshe Ben-Ezra and Shree K. NayarColumbia University
ICCV ConferenceOctober 2003, Nice, France
This work was supported by an NSF ITR Award IIS-00-85864

Transparency is Very Challenging
• Existence of a transparent object.• Finding its shape and pose

Real and Virtual Features
Lambertian
V1 V2
F`
V2
V1 F
Specular
F
F`
V1 V2
Transparent
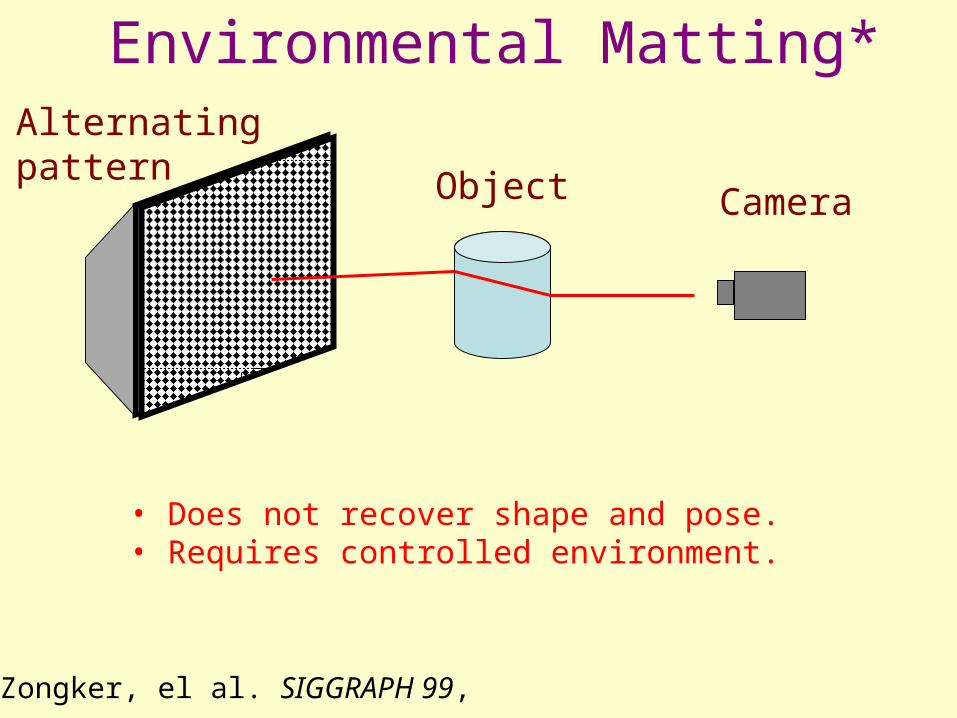
Environmental Matting*
* Zongker, el al. SIGGRAPH 99,
Alternatingpattern Object Camera
• Does not recover shape and pose.• Requires controlled environment.

Shape from Polarization in Highlight*
* Saito et al. CVPR’99.
Object
CameraLight
RotatingPolarizer
• Limited to a single interface at the object’s surface.• Requires controlled environment.
N

Shape from Refraction and Motion*
* H. Murase. PAMI, 1992
Camera
Water
• Single interface only.
Fixed Pattern

Motion is Key to Transparency

Transparent Shape From Motion
Given: Views
1,,222
,
n
n
e
eene zyxzyxs
And a Parametric Model (such as super-ellipse)
Recover:Shape: Values of parameters (e, n)Pose: Rotation R, Translation T
General analytic solution does not exist.

Transparency From Motion
Reversed rays are parallel to each other regardless ofthe complexity of their paths
Distantfeature

Approach: Initialization
Image Plane
Image Plane

Approach: Initial Guess

Approach: Refine

Error Function
(0,0,1)
r1,1 .. r1,n
r2,1 .. r2,n
j iji rzTRff
Feature Ray ,1 ,cosvar,,
• - Object’s shape parameter vector• R,T - Object’s pose

Simulation Setup
Parallel raysfrom features
Transparentobject
Cameraside rays

Example (Simulation)
Single Parameter. Newton-Raphson optimization
Initial GuessSymmetric Superellipse (n=e)

Evaluation (Simulation)
GT
Both init
Pos res
Sphere
Ground Truth
Initial Guess
ComputedResult
ShapeError
GT
Both Init
Both Res
Lens
GT
Both Init
Both Res
Cube
GT
Both Init
Both Res
Water Pipe
mm15
013.0:t mm
80
03.0:f
25.0
0001.0:emm
160
064.0:d

Real Experiment: Sphere

Features

Initial Guess
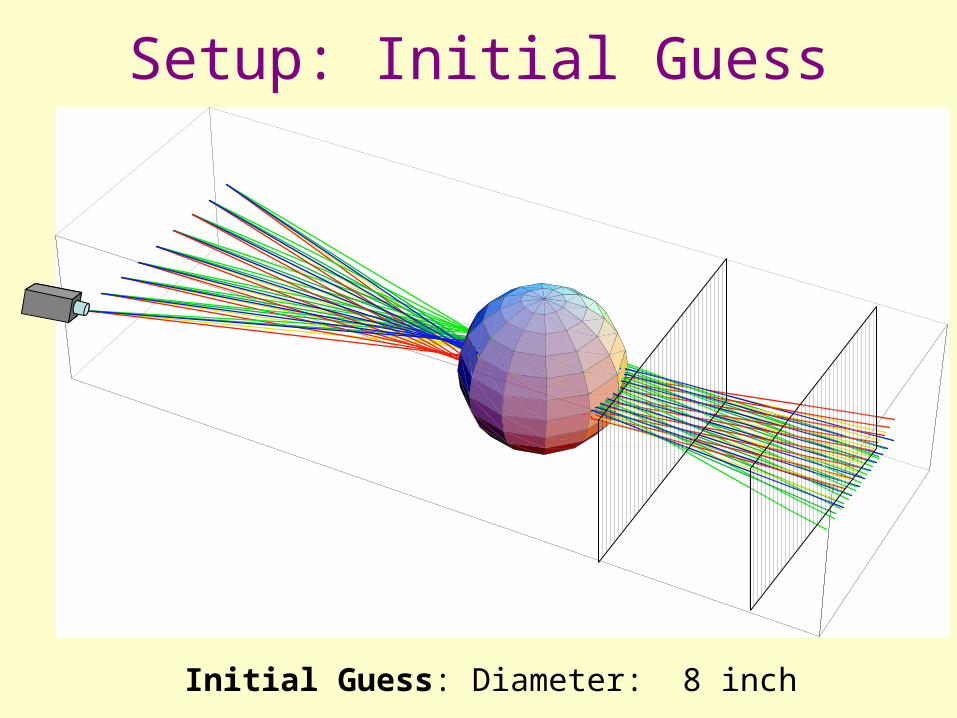
Setup: Initial Guess
Initial Guess: Diameter: 8 inch

Setup: Result
Ground Truth: Diameter: 3 inch. Computed: 3.18 inch

Result

Real Test: Water Filled Pipe

Features

Initial Guess

Setup: Initial Guess
Initial guess: Diameter: 200.0mm Thickness: 20.0mm

Setup: Result
Ground Truth: Diameter: 117.0mm Thickness: 3.0mmComputed: Diameter: 116.1mm Thickness: 2.3mm

Result

Real Test: Superquadric

Features

Initial Guess

Result
Ground truth: e = ? Computed: e = 0.18
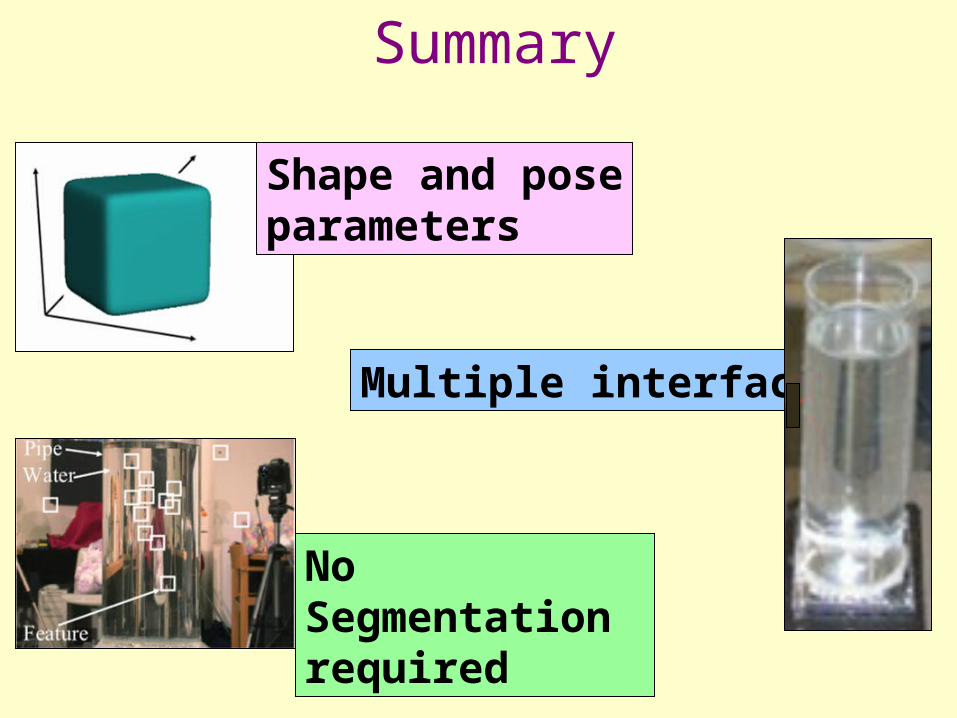
Summary
Shape and poseparameters
Multiple interfaces
No Segmentationrequired


Parameterizations of Interest
• Polynomials: modeling surfaces, lenses
• CAD models: shape of industrial objects
• Dynamic models: time dependent parameters

Assumptions
• Camera parameters are known.
• Features are far* and are trackable.
• A proper model and a hypothesis (an initial guess) are given.
* One possible assumption.
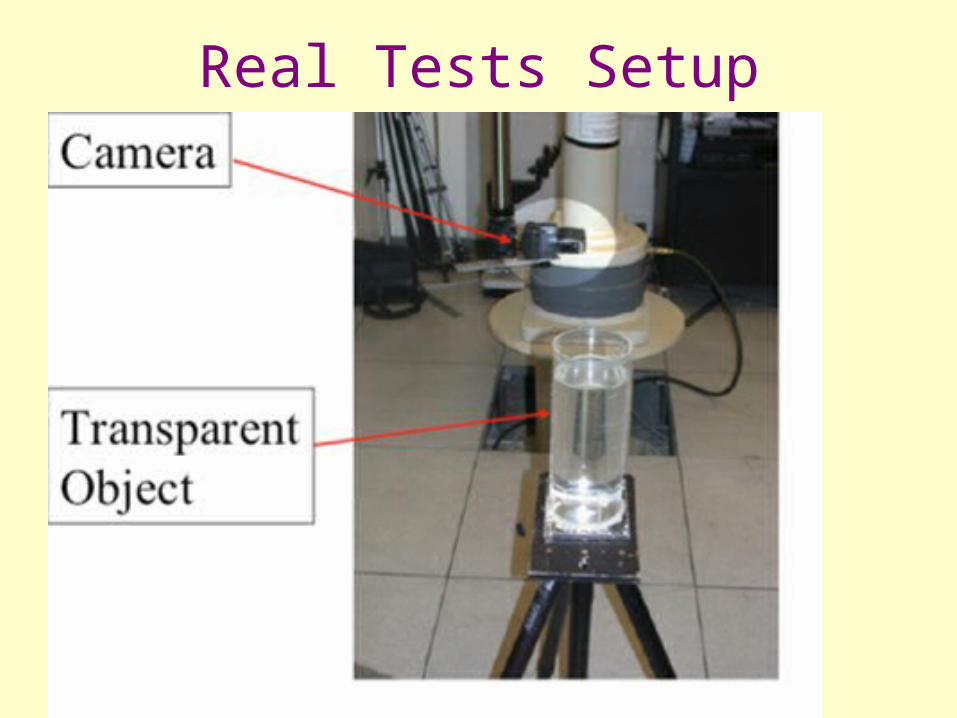
Real Tests Setup

Implementation
• Features were manually selected and tracked (9 views).
• Captured rays, a model, refraction index and a hypothesis were given as inputs.
• Shape and pose were recovered using simple gradient decent (with derivatives).

The Physics of TransparencyFirst Interface:
μ1→ μ2
Second Interface: μ2 →μ1
3
11
3
N1
N2
2 2
3211 sinsin :Refraction
2
111 sin
:reflection internal Total
2
21
221
,21
R :Reflection

Parametric Shape Examples
Super-Ellipse2 parameters
Spherical Harmonics8 parameters
No analytic solution